Robust Radiation Sources Localization Based on the Peak Suppressed Particle Filter for Mixed Multi-Modal Environments


Abstract
:1. Introduction
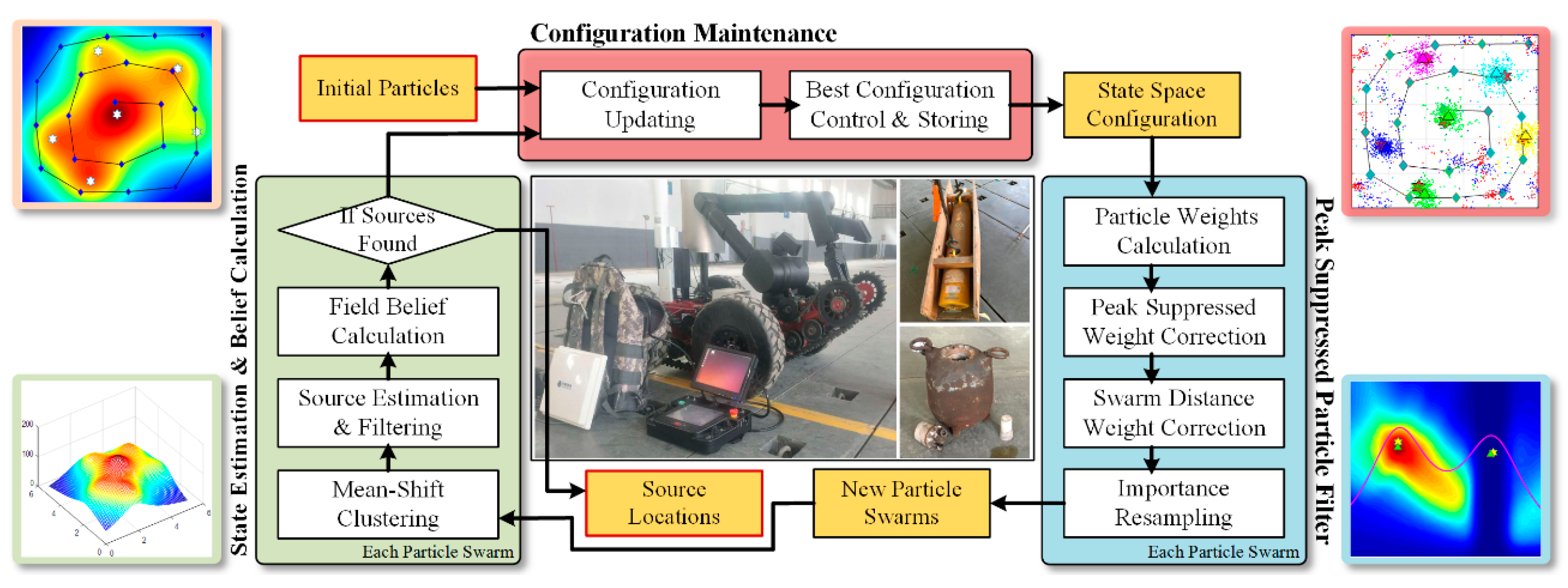
- The PSPF algorithm introduces a multi-layer state structure instead of a unified space, i.e., particle swarm of each layer just identifies a single source. This structural improvement, coupled with sequential estimation and weight suppression operation, can effectively tackle the cumulative effect that detected total dose rate could not be utilized directly for the prediction model. Additionally, as the layer extension is roughly linear with processing runtime, the proposed algorithm shows excellent performance on dimensional scalability while existing methods always fall into dimension disaster problem.
- Besides the observation probabilistic model, peak suppression factor and swarm distance factor are also incorporated into the particles weighting process. The peak suppression technique utilizes the sigmoid function to decrease the weights of particles which possess higher radiation strength. The latter factor is adopted to avoid sequential cluster collapse as the swarms get too close in proximity. These factors can efficiently ensure the multimodal balance and speed up the estimation procedure. Through the synthesized weighting model and sequential multi-layer prediction, the challenges in mixed multi-modal radiation field have been overcome.
- Due to the lack of prior knowledge about source number, it is impossible to locate the sources by pre-defining an accurate source number. In existing algorithms, the ambiguity about source number is solved by exhaustive method [15,23], which is not a practicable and real-time solution. Enlightened by the fact that redundant swarms always remain non-cluster or minimal strength status in prediction procedure (when the swarm number is larger than source number), the non-parametric performance about source number could be obtained by the multi-layer prediction structure in our algorithm, as shown in Figures 6 and 8.
- In the parameter estimation phase, a filtering criterion has been conceived and applied after the mean-shift clustering procedure. This clustering method don’t need to explicitly associate the cluster centroids with individual radiation sources, while the filtering criterion could determine if the cluster centroid is available or not. The above mentioned criterion is helpful to simplify the algorithm structure and improve calculative efficiency.
2. Problem Statement and Detection Modelling
2.1. Problem Statement
- (i)
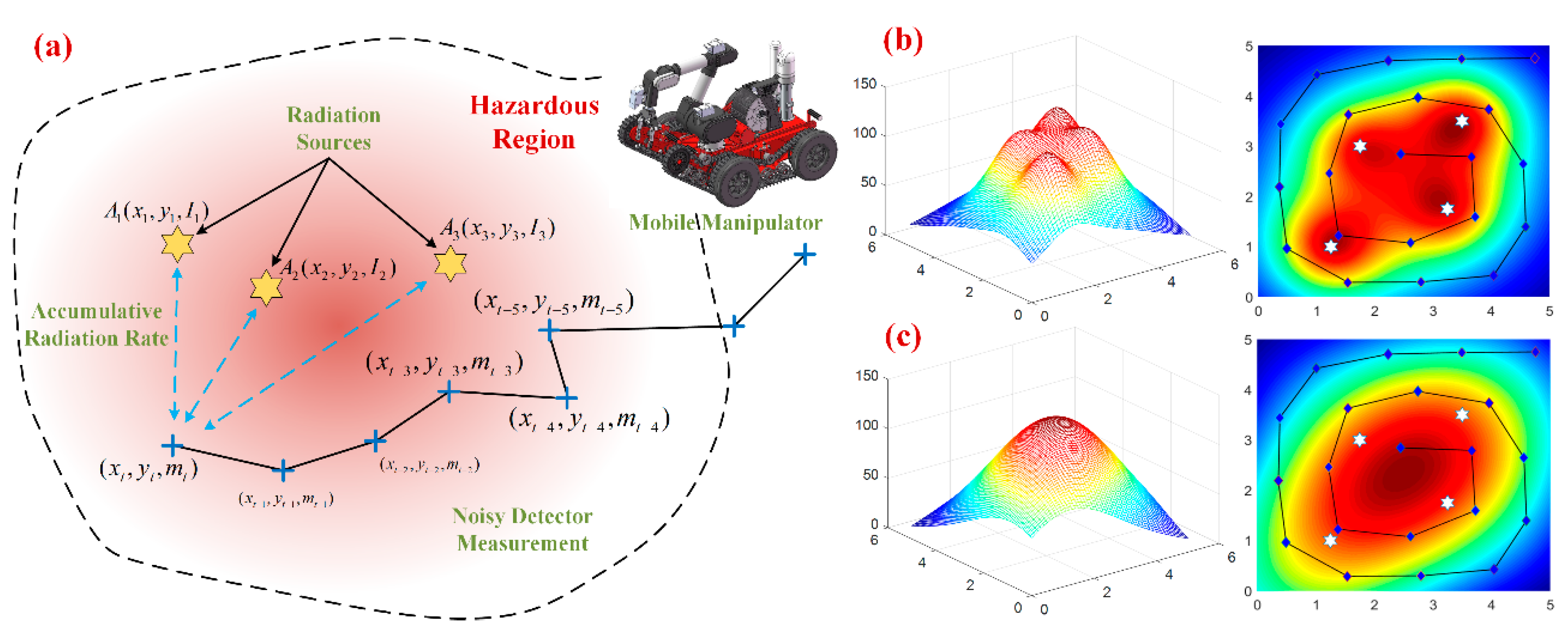
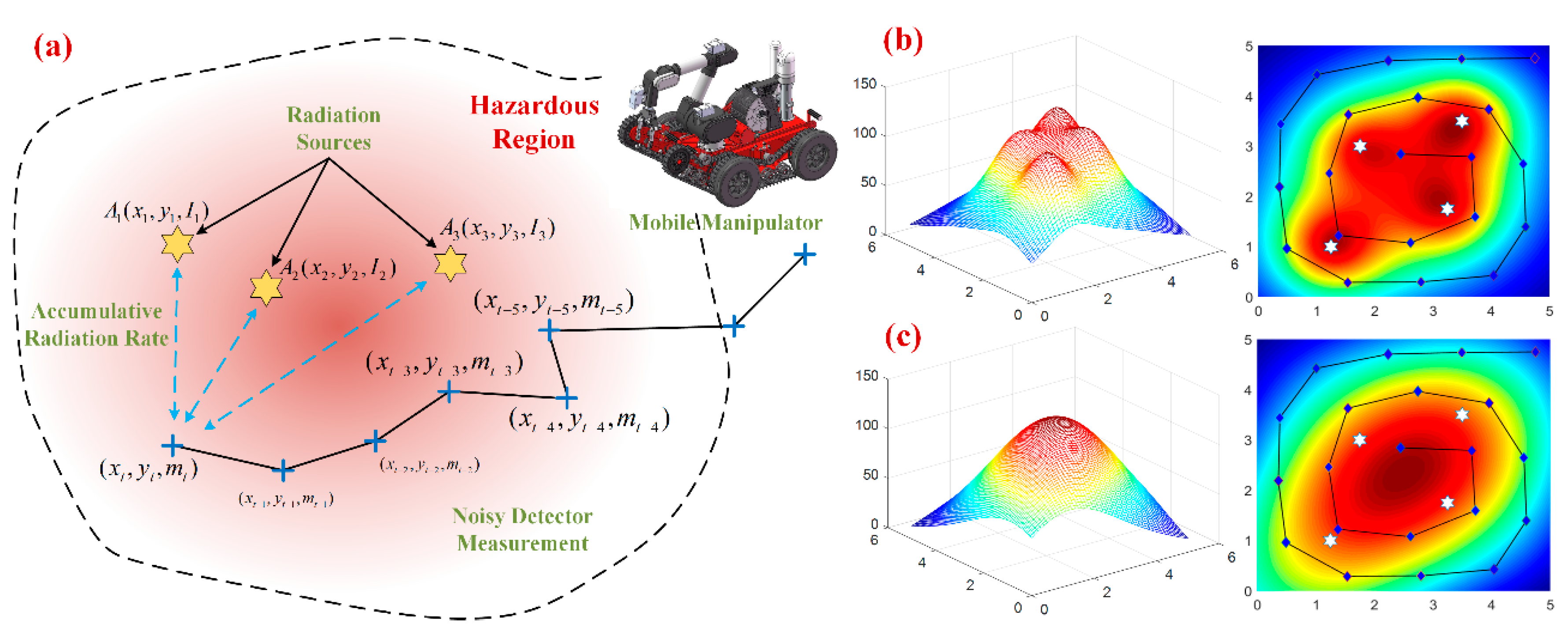
- As the GM-type detector could just provide a noisy total dose rate in one location, Poisson based observation model could not be utilized directly in our case. Moreover, the cumulative effect and mixed radiation field invalidate the gradient prediction methods [24] while only an ambiguous hotspot could be perceived. Similar dilemma occurs in mixture models [15,16] as no conjugated distribution exists.
- (ii)
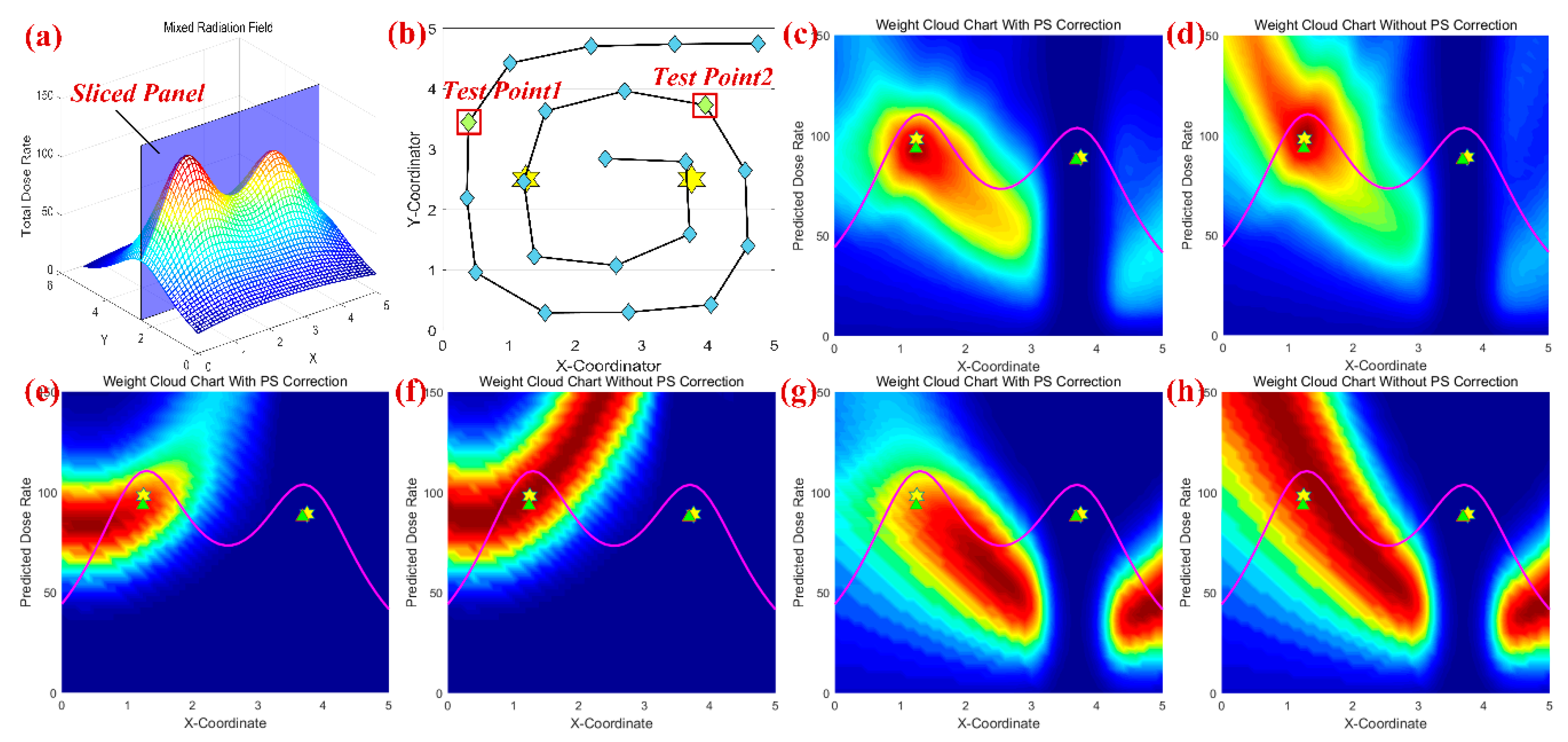
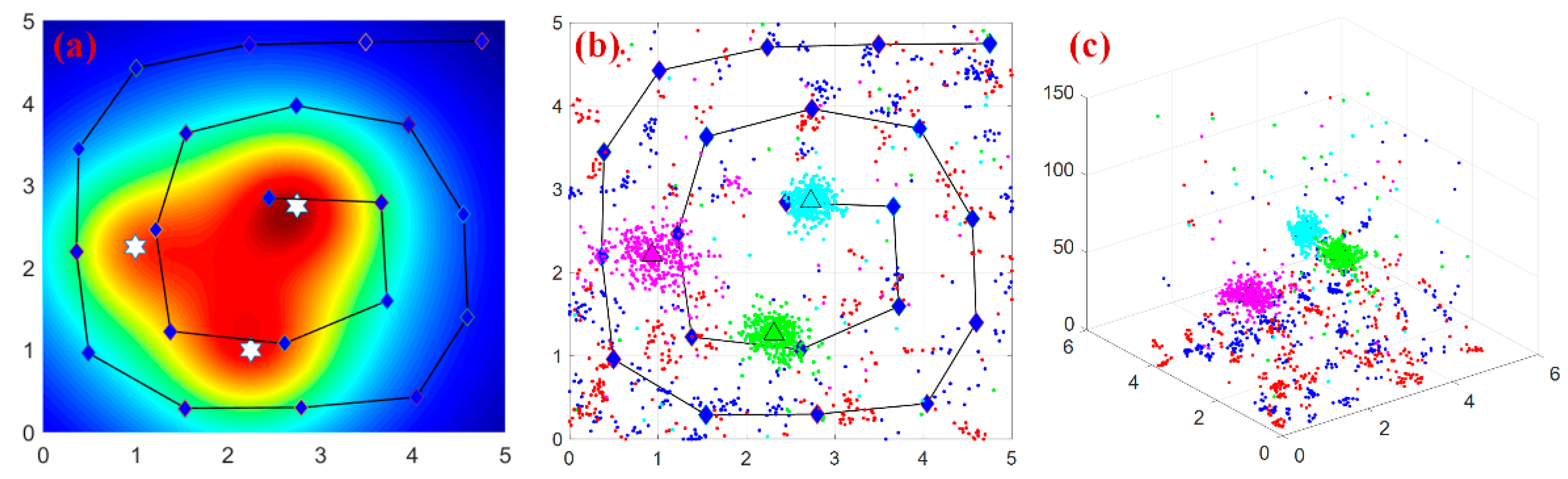
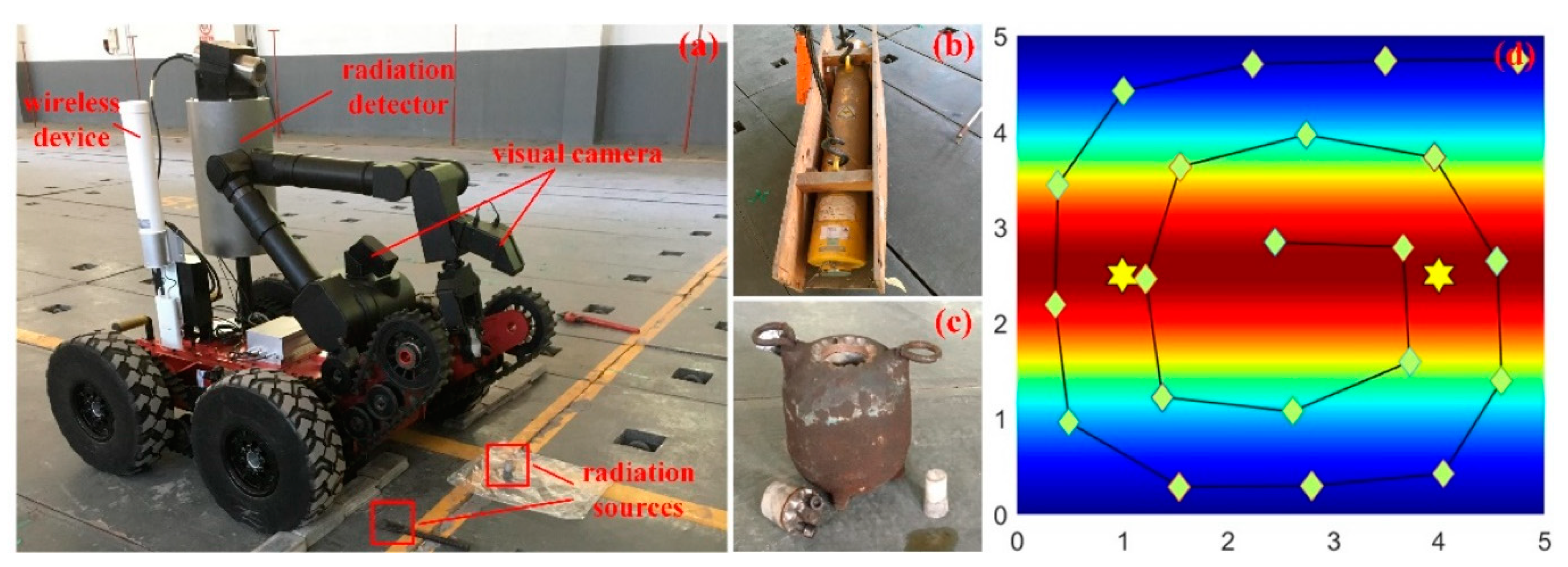
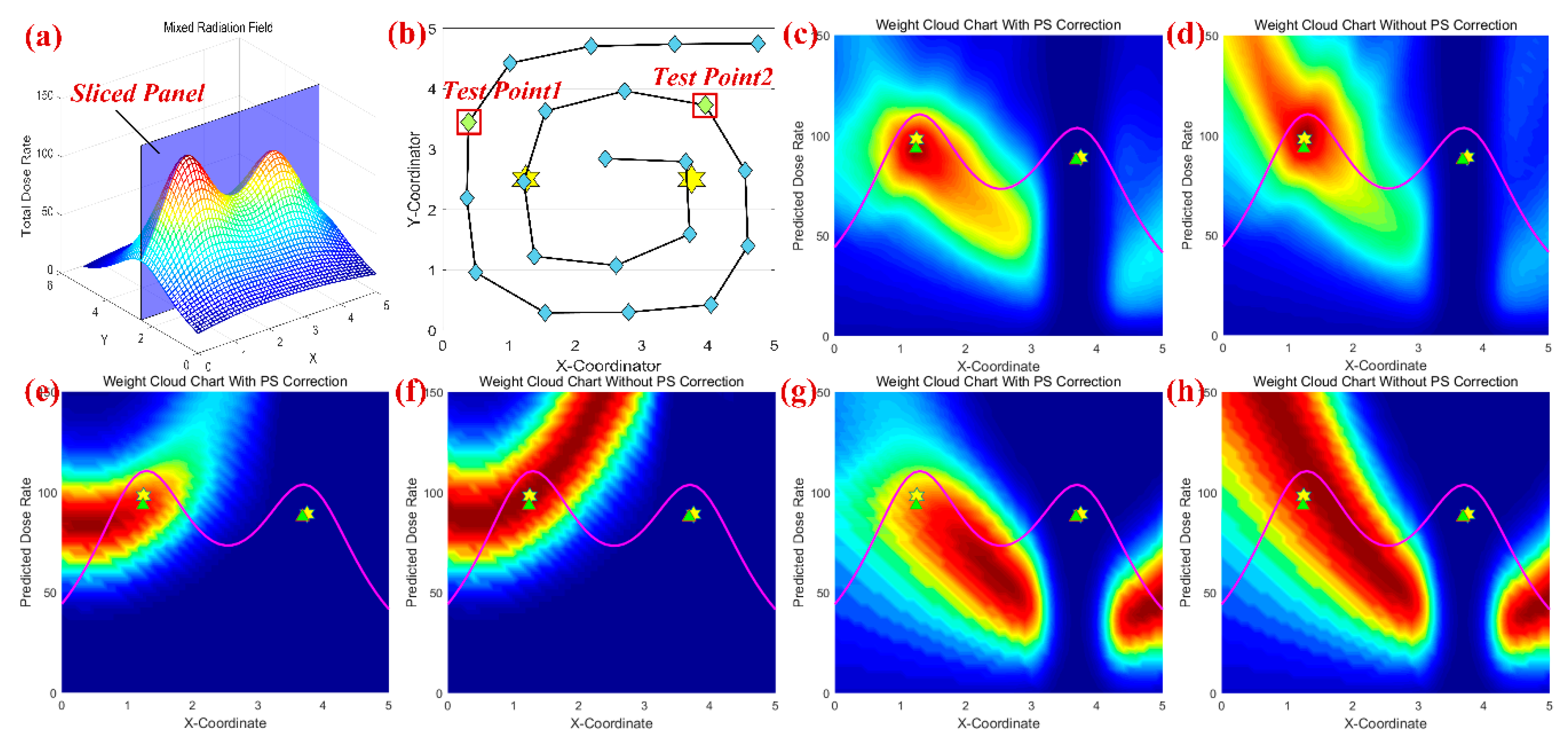
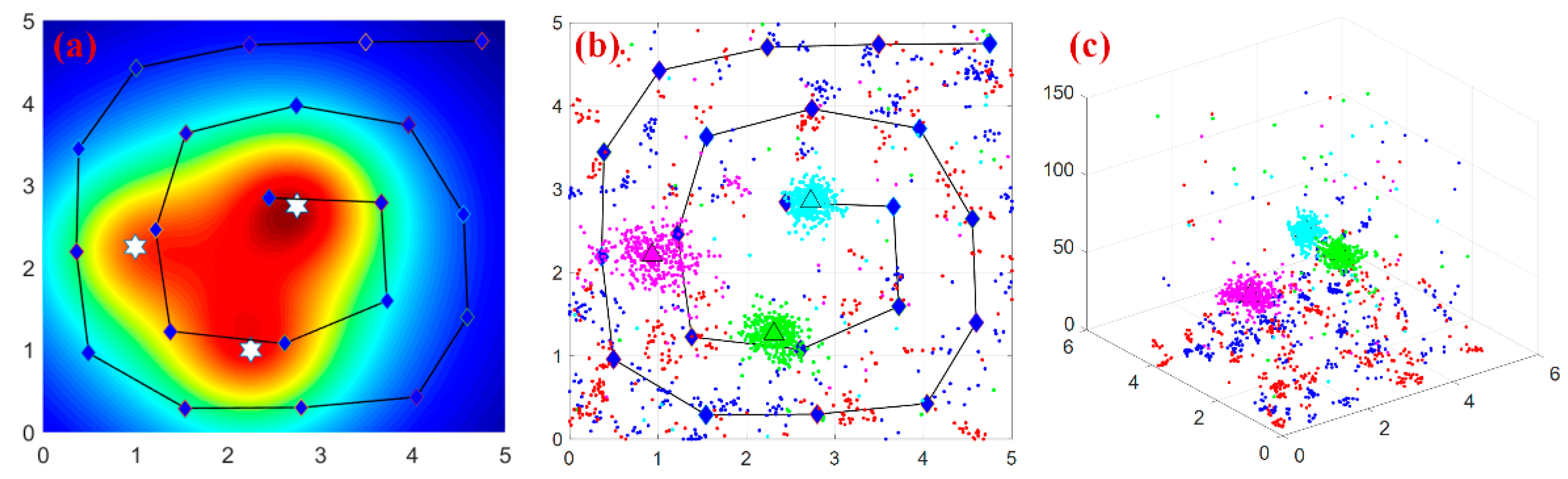
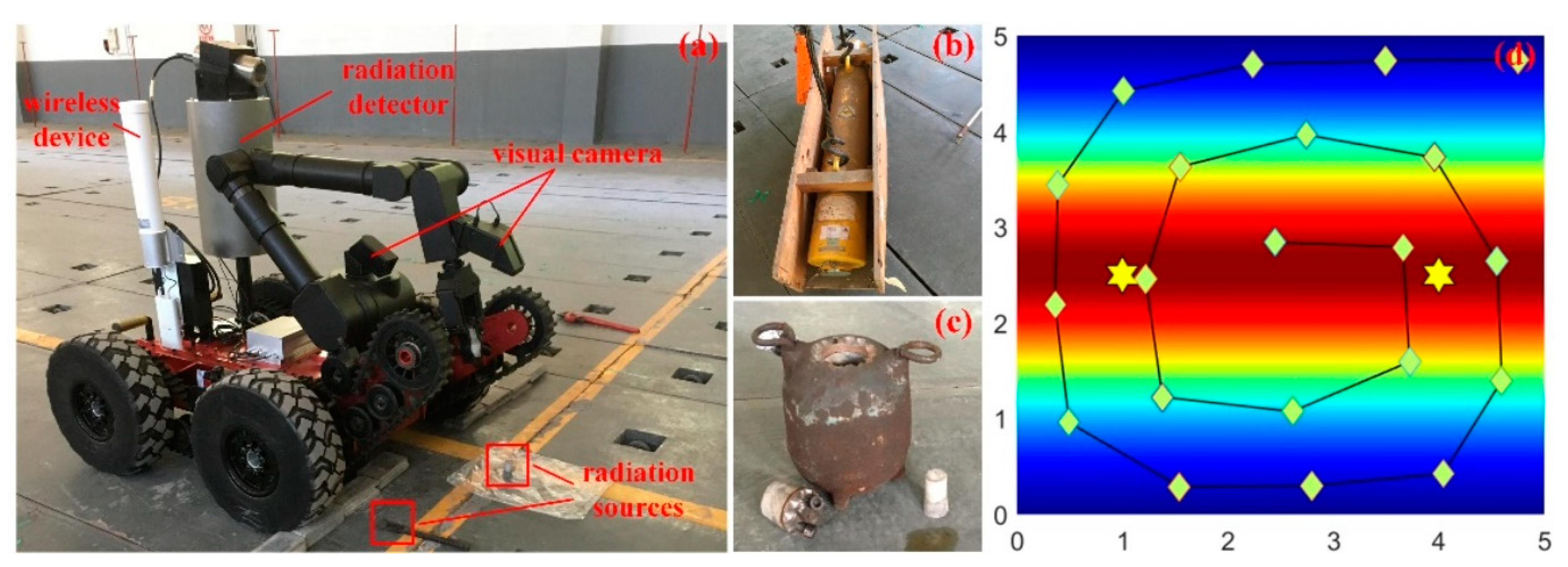
- Considering the limited exploration period and sluggish sensor response, only sparse measurements could be collected by the GM counter. These spatially separate data always fail to construct the multi-modality field by regression methods (e.g., Gaussian Processes), as illustrated in Figure 1c. Furthermore, the peak values of the radiation field don’t coincide with the source locations as the radioactive cumulative effect.
- (iii)
- As the proposed algorithm is formulated on the basis of particle filter, a structure improvement should be performed to realize multi-modality maintenance for the target distribution [22]. Additionally, several measurements should be taken to enable the weighting model to process the collected measurements, which represent the cumulative dose rate in each location.
2.2. Detection Modelling
3. Preliminary Estimation Methods
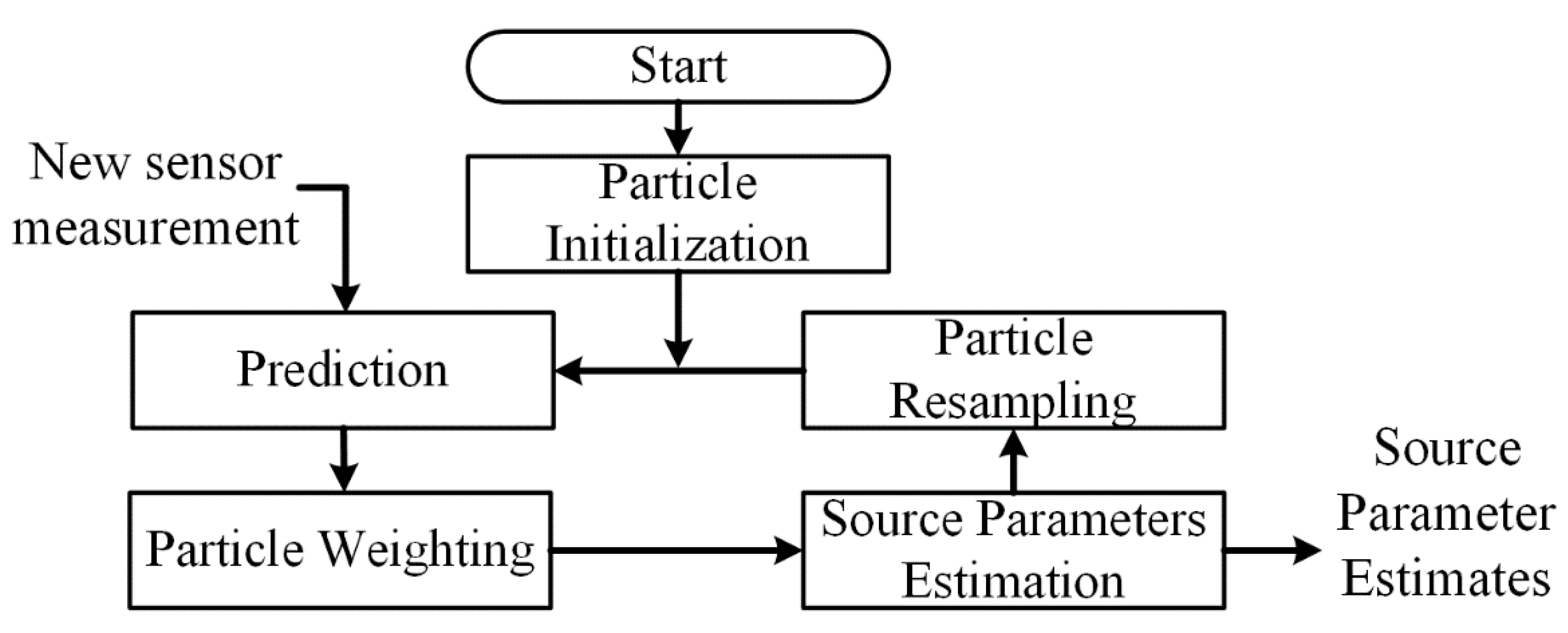
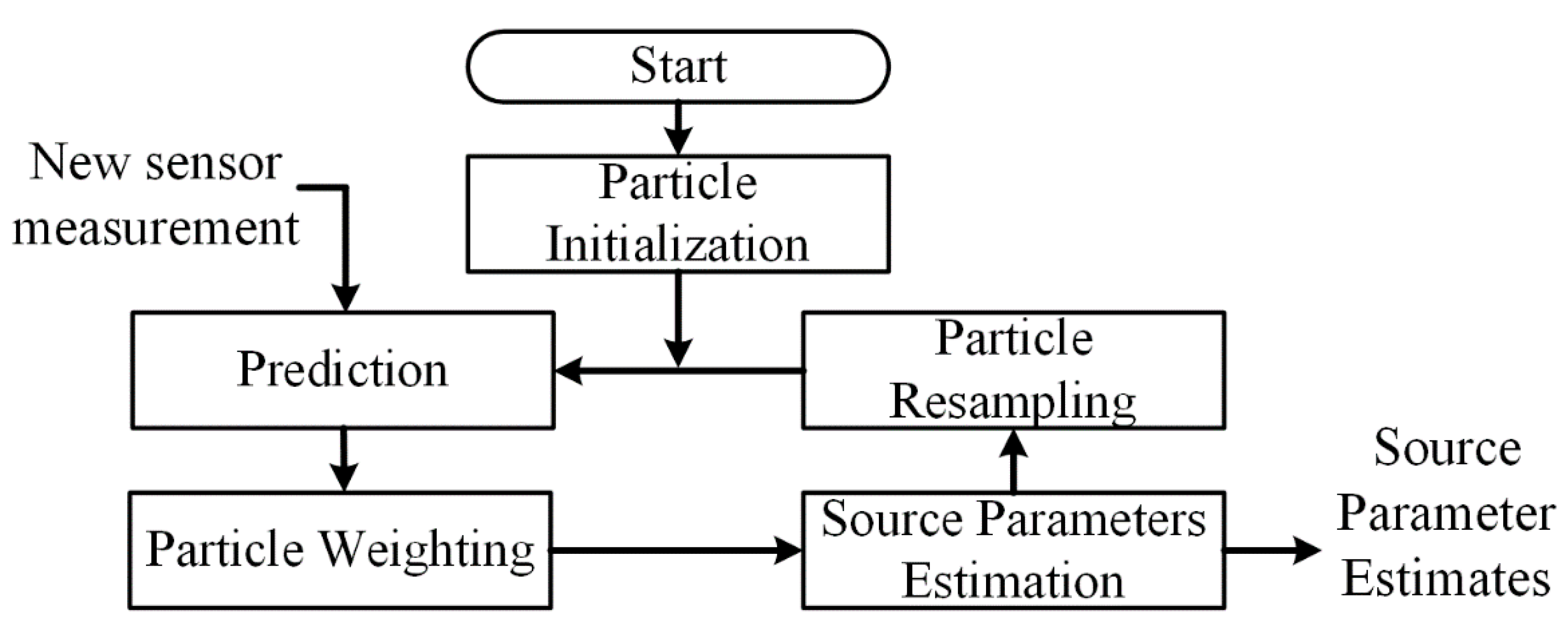
3.1. Particle Filter
3.2. Mean-Shift Clustering
4. Proposed Algorithm Design
4.1. Particle Initialization
4.2. Synthesized Particle Weighting
4.2.1. Detector Weighting Model
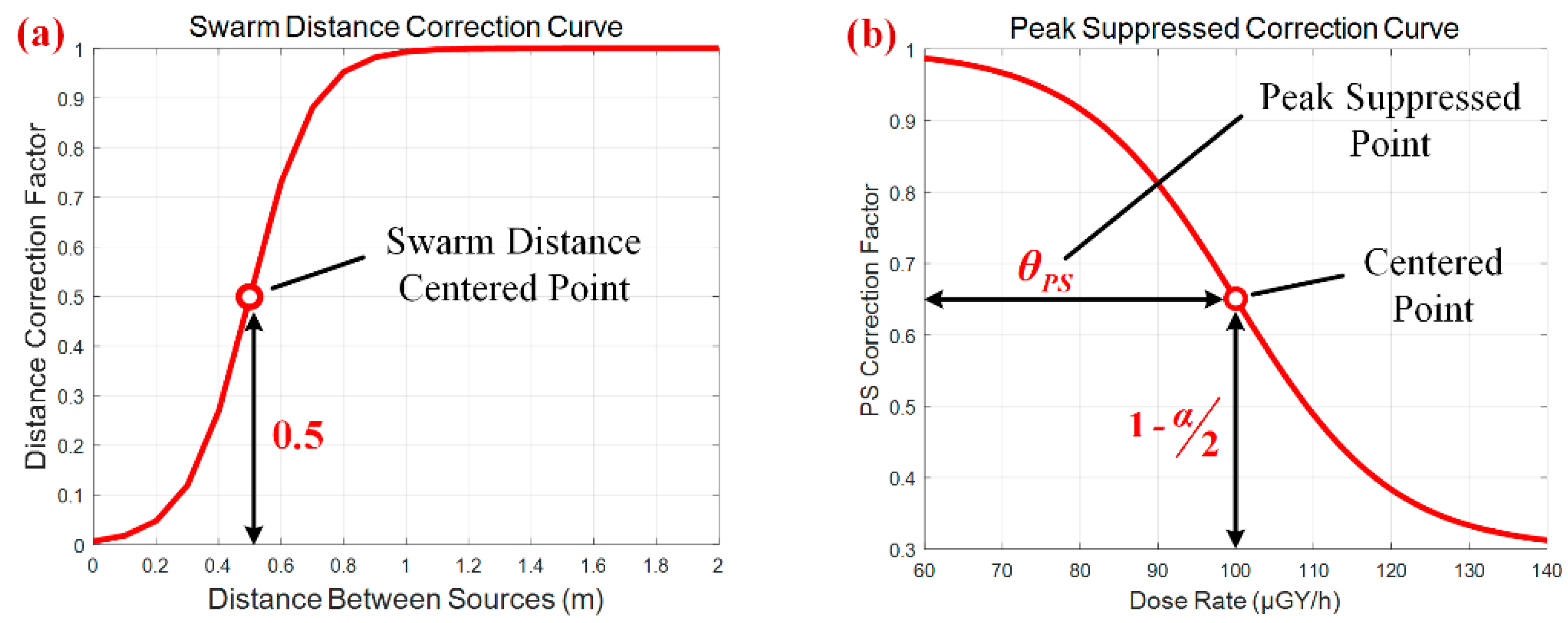
4.2.2. Swarm Distance Correction Model
4.2.3. Peak Suppressed Correction Model
4.3. Importance Resampling
4.4. Sources Parameters Estimation
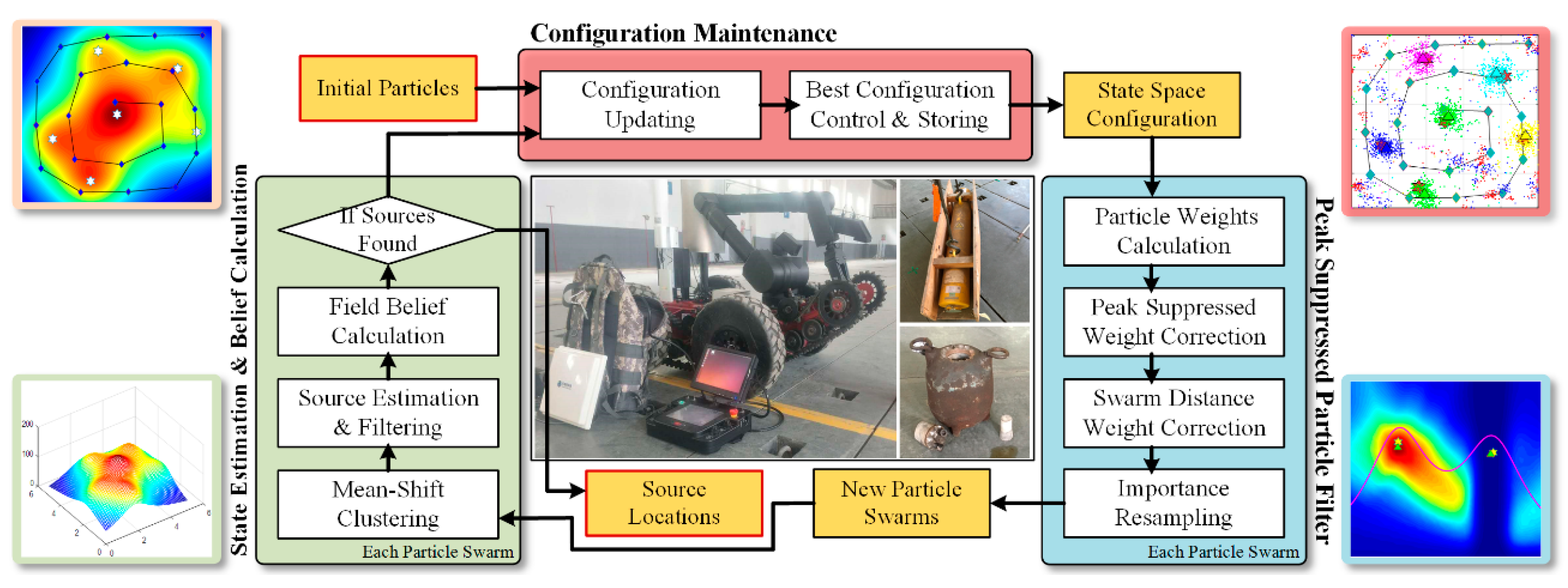
4.5. Configuration Maintenance
4.6. The Complete Algorithm
| Algorithm 1. Specific Flowchart of the Cross-mixed Multiple Radiation Sources Localization Algorithm based on Peak Suppressed Particle Filter (PSPF) | ||
| Inputs: A sequential measurements of the radiation sensor , consisting of the total dose rate and their corresponding positions. | ||
| Outputs: State set of the predicted radiation sources , each state is a three-vector value consisting of position and intensity messages.
Notes: denotes the clustered centroids for each swarm. denotes the temporal state set for each swarm, as shown in L14~L18. indicates the set of particle states for each swarm. θps and θdist are the sigmoid offset value in peak suppression model and distance weighted model respectively. | ||
| 1. | fors = 1, …, Ms do | ▷ Model Initialization |
| 2. | for r = 1, …, Mr do | ▷ randomly sample the three-value vectors from state-space and assign them as predicted particles. |
| 3. | ~rand(pos_min, pos_max); | |
| 4. | ~rand(str_min, str_max); | |
| 5. | end for | |
| 6. | end for | |
| 7. | fort = 1, …, T do | ▷ Sources Localization Starting |
| 8. | Initialize the measurement set active = | |
| 9. | for n = 1, …, N do | ▷ iteration for each measurement |
| 10. | Select one measurement Irand(n) from active set active | |
| 11. | for s = 1, …, Ms do | ▷ iteration for each particle swarm |
| 12. | for r = 1, …, Mr do | ▷ Peak Suppressed Particle Filter |
| 13. | for s’ = 1, …, Ms do | ▷ construct temporal state set for each particle , consisting of current particle state and centroids for other swarm. |
| 14. | if s’ = s then | |
| 15. | ||
| 16. | else s’ ≠ s then | |
| 17. | ||
| 18. | end if | |
| 19. | end for | |
| 20. | Compute the predicted dose rate for current position: | ▷ Synthesized Importance Weighting |
| 21. | ▷ according to expression (2) | |
| 22. | Compute the synthesized weight for each particle: | ▷ according to expression (9), (10), (11) and (12) |
| 23. | ||
| 24. | Resampling: | ▷ Resampling Procedure |
| 25. | for r = 1, …,Mr do | ▷ add Gaussian noise to avoid particle impoverishment |
| 26. | Draw and set | |
| 27. | end for | |
| 28. | end for | |
| 29. | Select randomly D seeds from current particle swarm s,n: | ▷ Mean-Shift Clustering Procedure |
| 30. | ||
| 31. | repeat until convergence for each seed : | |
| 32. | for d = 1, …, D do | ▷ calculate shift vector iteratively and obtain cluster left according to expression (6) |
| 33. | ||
| 34. | ||
| 35. | end for | |
| 36. | end repeat | |
| 37. | Cluster the particles and obtain max probability and state | |
| 38. | if > THRpr and >THRstr then | ▷ THRpr and THRstr are the threshold about minimal probability and strength through which determine an effective cluster state |
| 39. | ||
| 40. | else then | |
| 41. | ||
| 42. | end if | |
| 43. | end for | |
| 44. | for m = 1, …, N do | ▷ Confidence and State Estimation |
| 45. | Compute the dose rate given predicted cluster and position : | |
| 46. | ||
| 47. | end for | |
| 48. | = 0 | ▷ calculate the confidence of entire radiation field according to expression (13) |
| 49. | for m = 1, …, N do | |
| 50. | ||
| 51. | end for | |
| 52. | if > best then | ▷ Configuration Maintenance |
| 53. | Update the best condition and corresponding state: | |
| 54. | count = 0 | |
| 55. | else then | |
| 56. | count = count + 1 | |
| 57. | end if | ▷ best configuration storing and controlling machine |
| 58. | if count > THRcount then | |
| 59. | ▷THRcount is the threshold whether to recover best configuration ▷ THRpr_end is the threshold whether to pass over expected probability | |
| 60. | count = 0 | |
| 61. | end if | |
| 62. | if best > THRpr_end then | |
| 63. | break the loop | |
| 64. | end if | |
| 65. | Update active measurement set: active = active – Irand(n) | |
| 67. | end for | |
| 68. | end for | |
| 69. | if best > THRpr_end then | ▷ determine whether it’s an effective prediction by threshold THRpr_end |
| 70. | ||
| 71. | for s = 1, …, Ms do | |
| 72. | if then | |
| 73. | Append Cs,n to 𝒜 | ▷ append non-empty cluster states to the predicted set 𝒜 |
| 74. | end if | |
| 75. | end for | |
| 76. | else then | ▷ append empty set to 𝒜, meaning prediction failed |
| 77. | ||
| 78. | end if | |
| 79. | Output predicted radiation sources state 𝒜. | ▷ Output Predicted Sources |
5. Simulation and Experimental Research
5.1. Simulation Scene 1: Localization with Different Background Radiation
- (i)
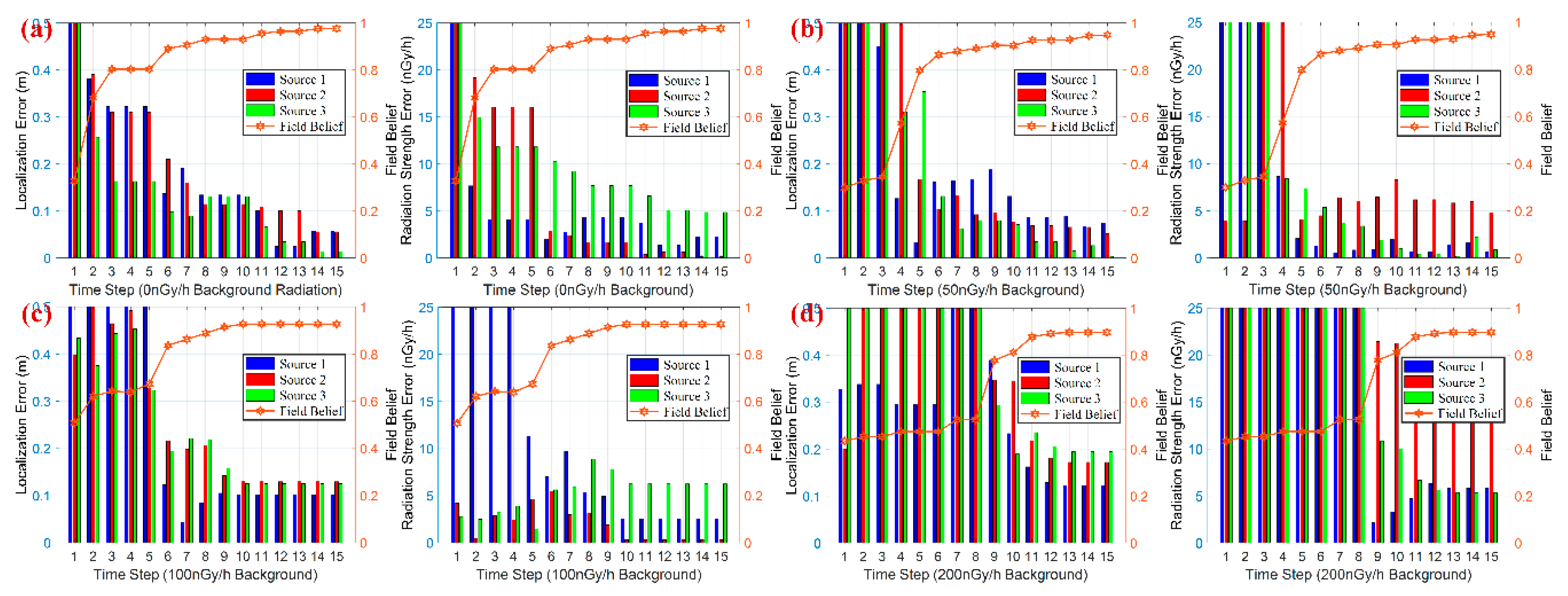
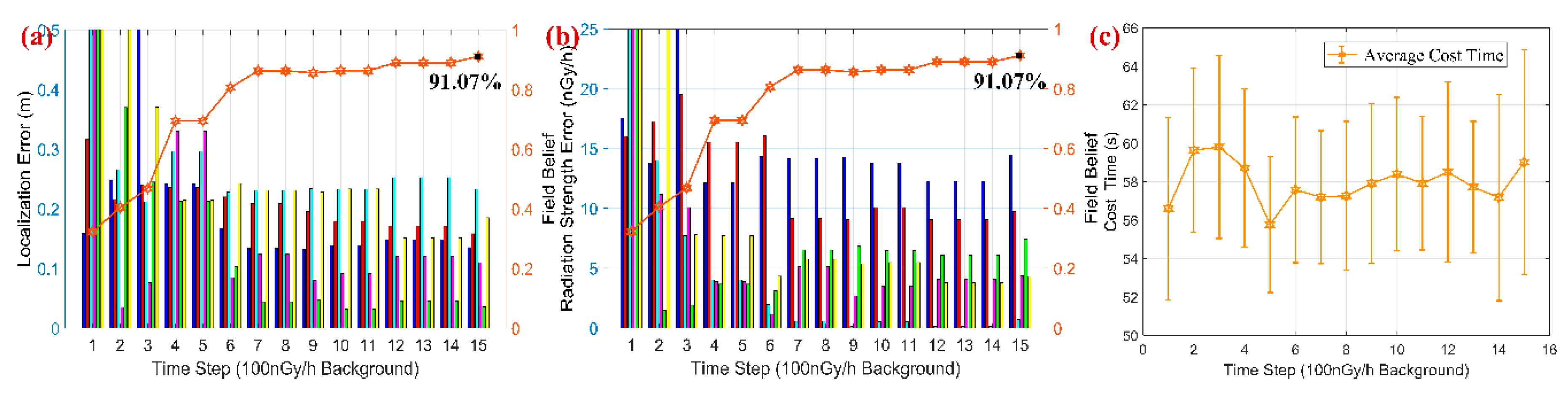
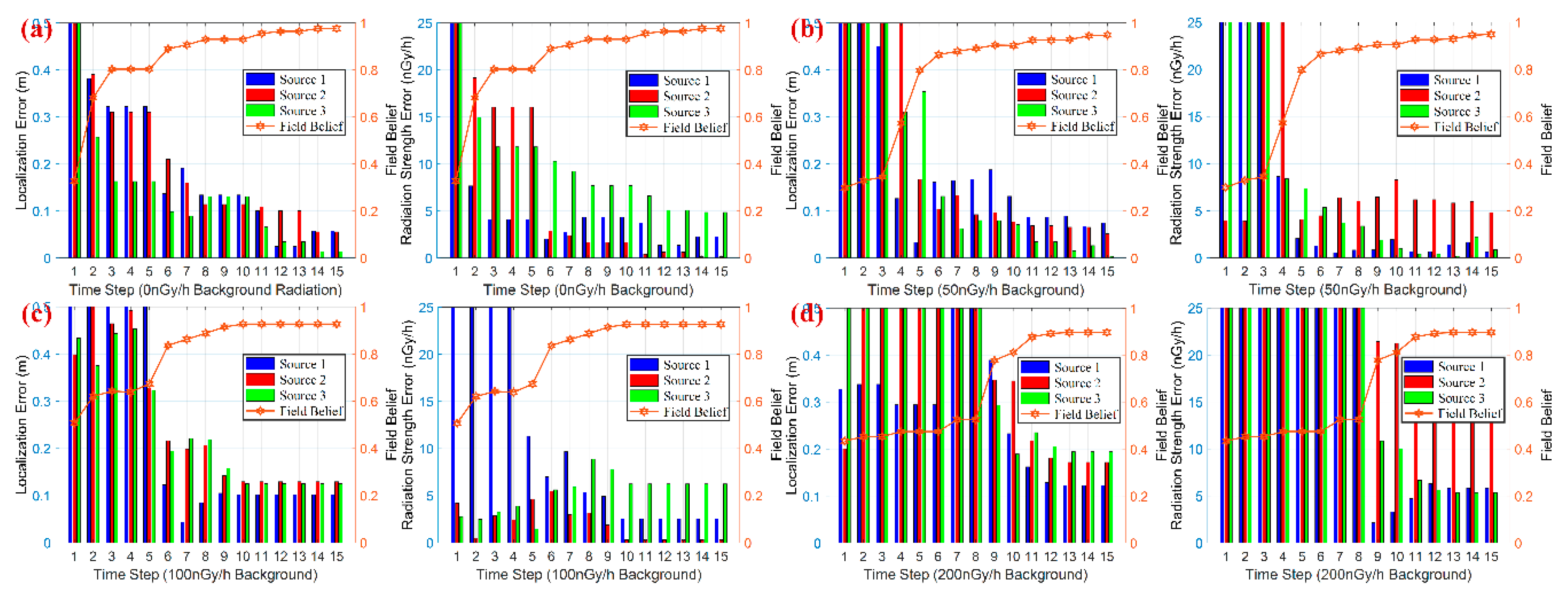
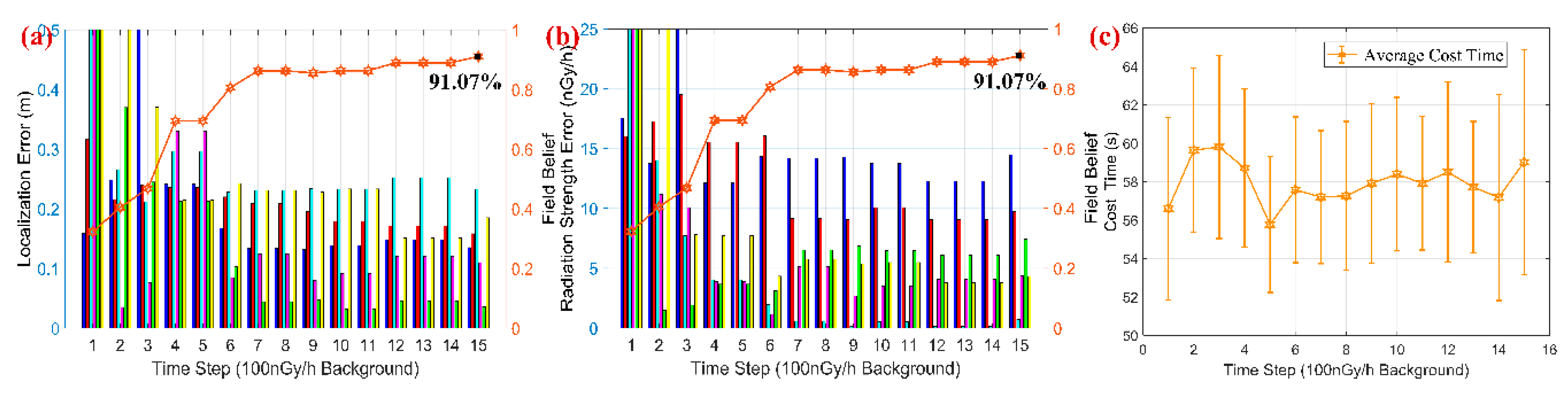
- Numeric simulations show that PSPF algorithm works well in the above four conditions, i.e., 0, 50, 100 and 200 nGy/h background radiation for each case. However, more iterations are required to produce accurate prediction as the background increases. Especially with the 200 nGy/h background level (e.g., the noise almost accounts for 20% of the signal), 8 iterations are taken to produce a relatively stable and accurate estimates.
- (ii)
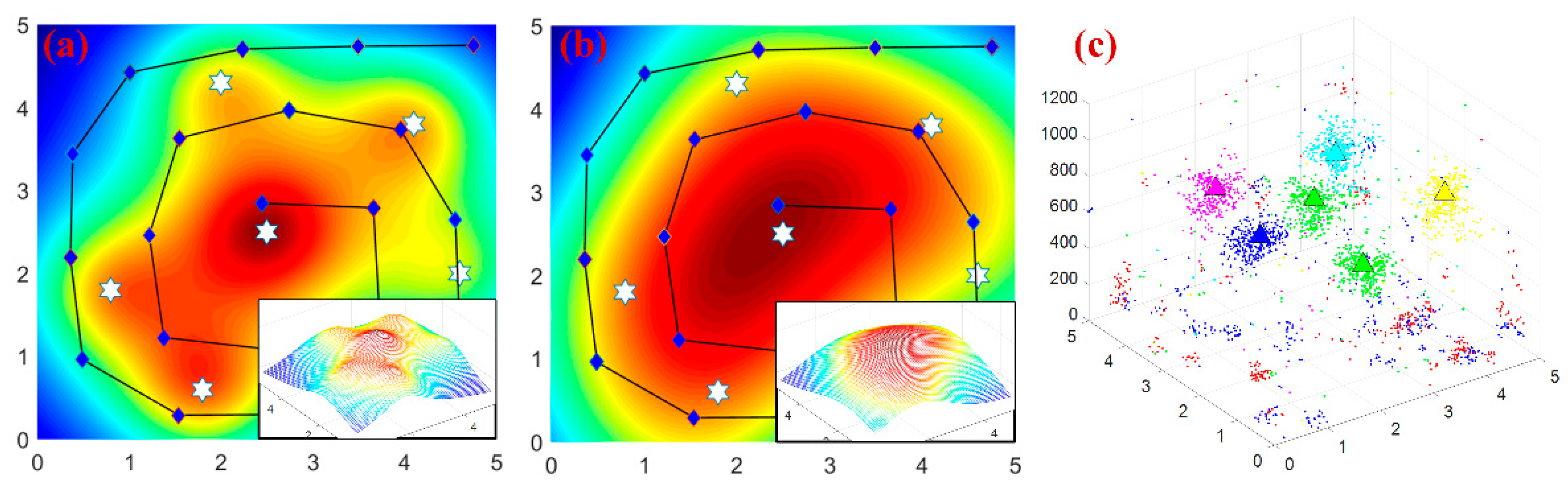
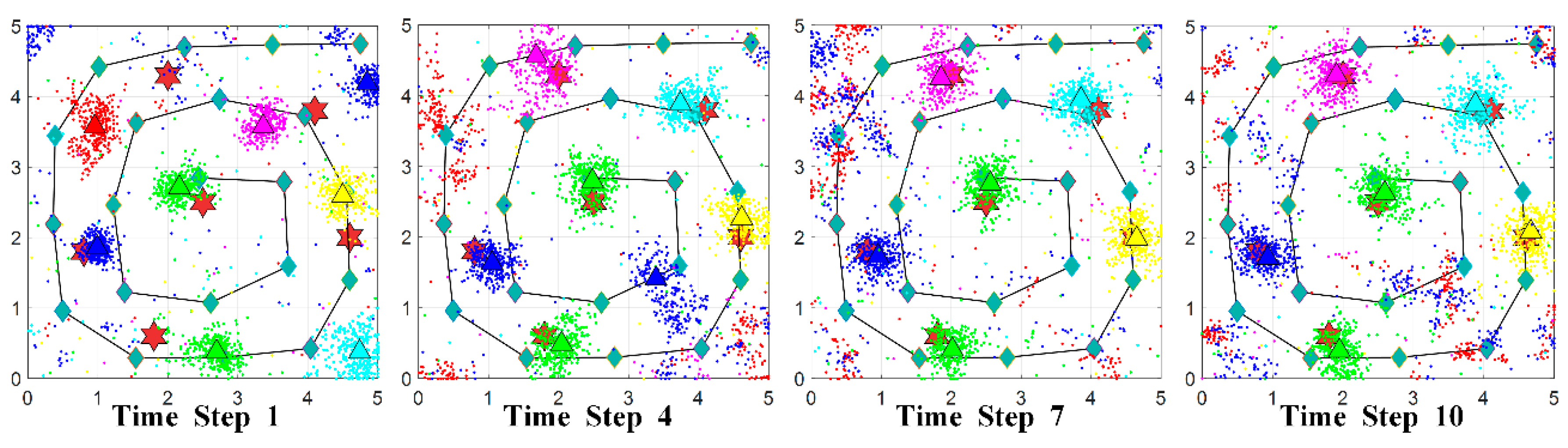
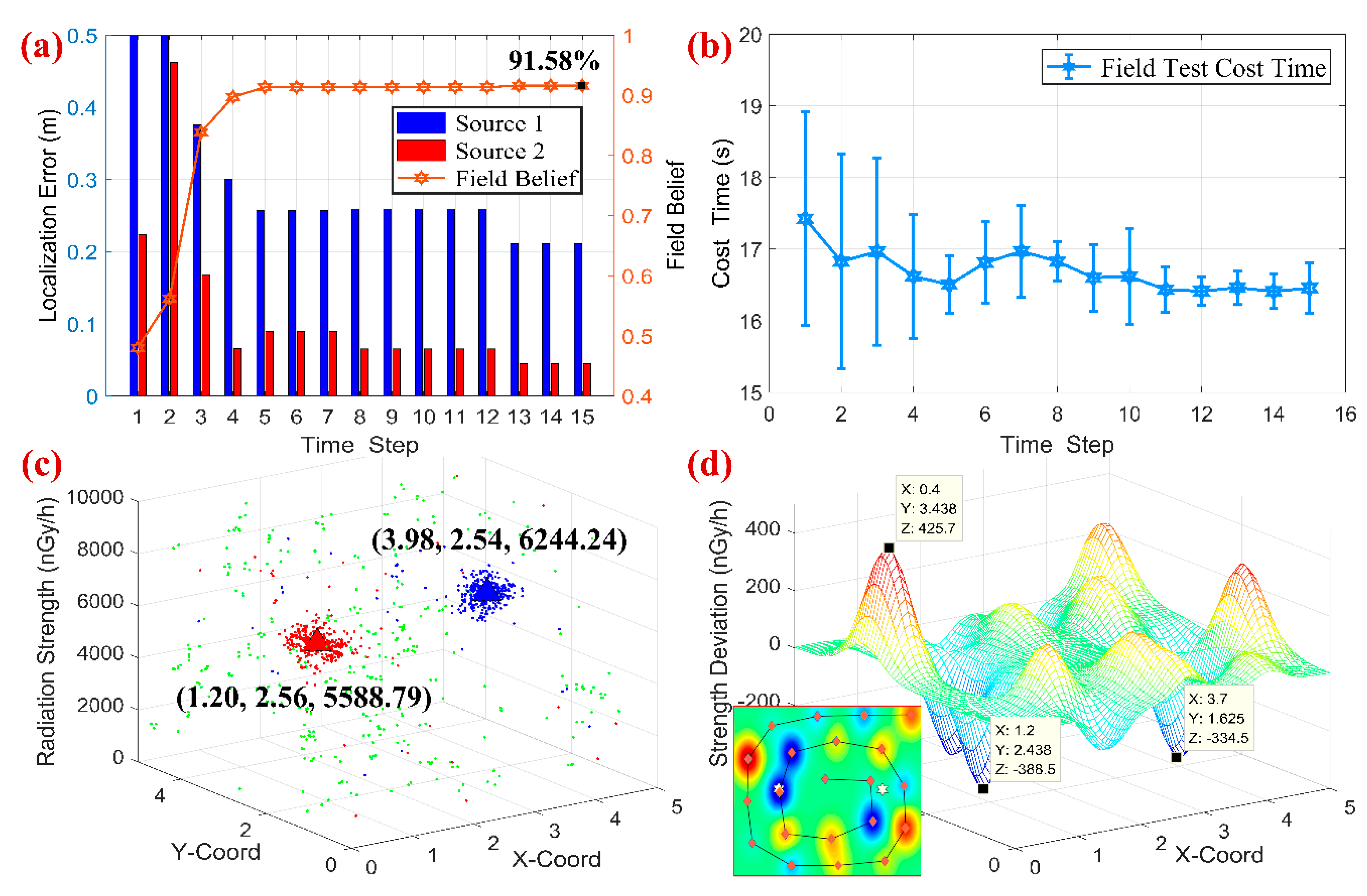
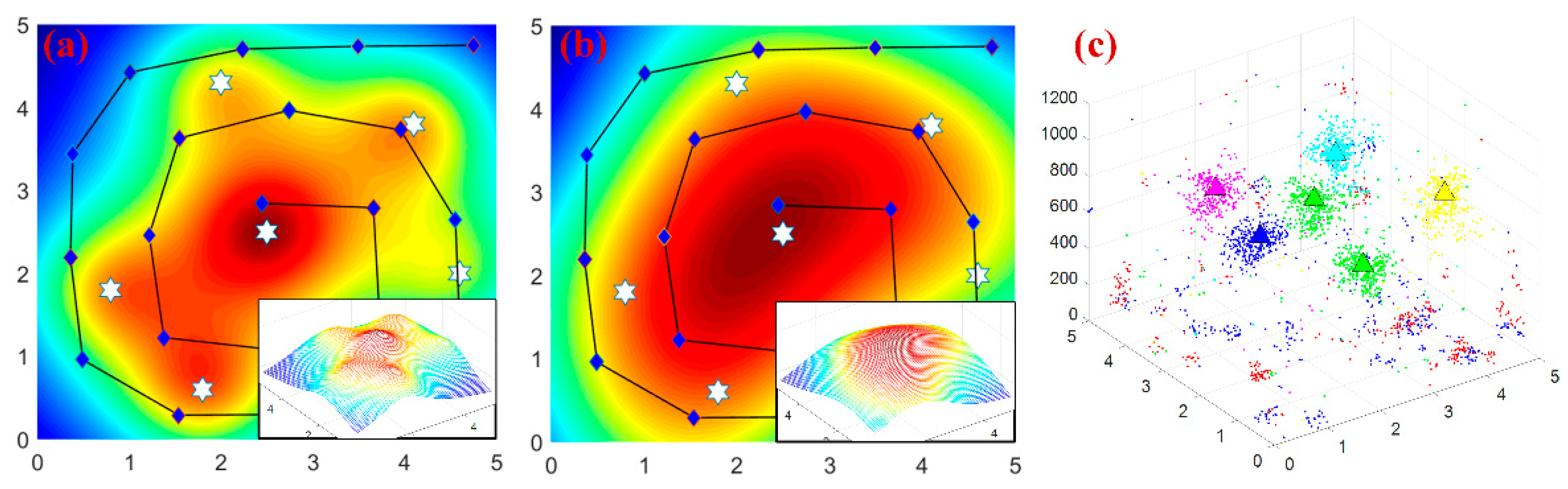
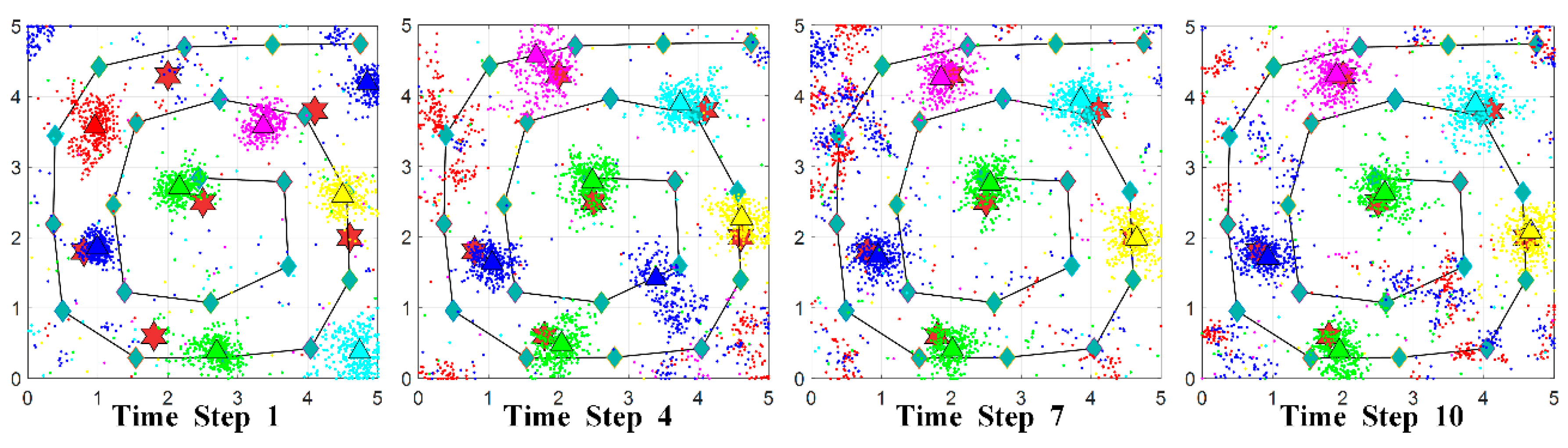
- In the term of false positives and negatives, all the estimates correspond to the correct sources, that is, no more or less cluster centers are produced in each simulation. As 5 candidate particle swarms are employed for estimation, it can be observed that two particle swarms remain non-clustered status along the whole prediction process. The phenomenon and simulation results validate the non-parametric property about source number determination in the proposed algorithm.
- (iii)
- From above simulation results, we can see the final confidence score increases to a high level even in large background noise, validating the robustness and practicability of the algorithm. In addition, a great improvement on field belief can be observed after several iterations, while the remaining procedure is just local correction on candidate parameters. This fact indicates the necessity of the iteration over sensor measurements.
5.2. Simulation Scene 2: Large-Scale Multiple Sources Estimation
5.3. Simulation Scene 3: Processing Runtime Test
- (i)
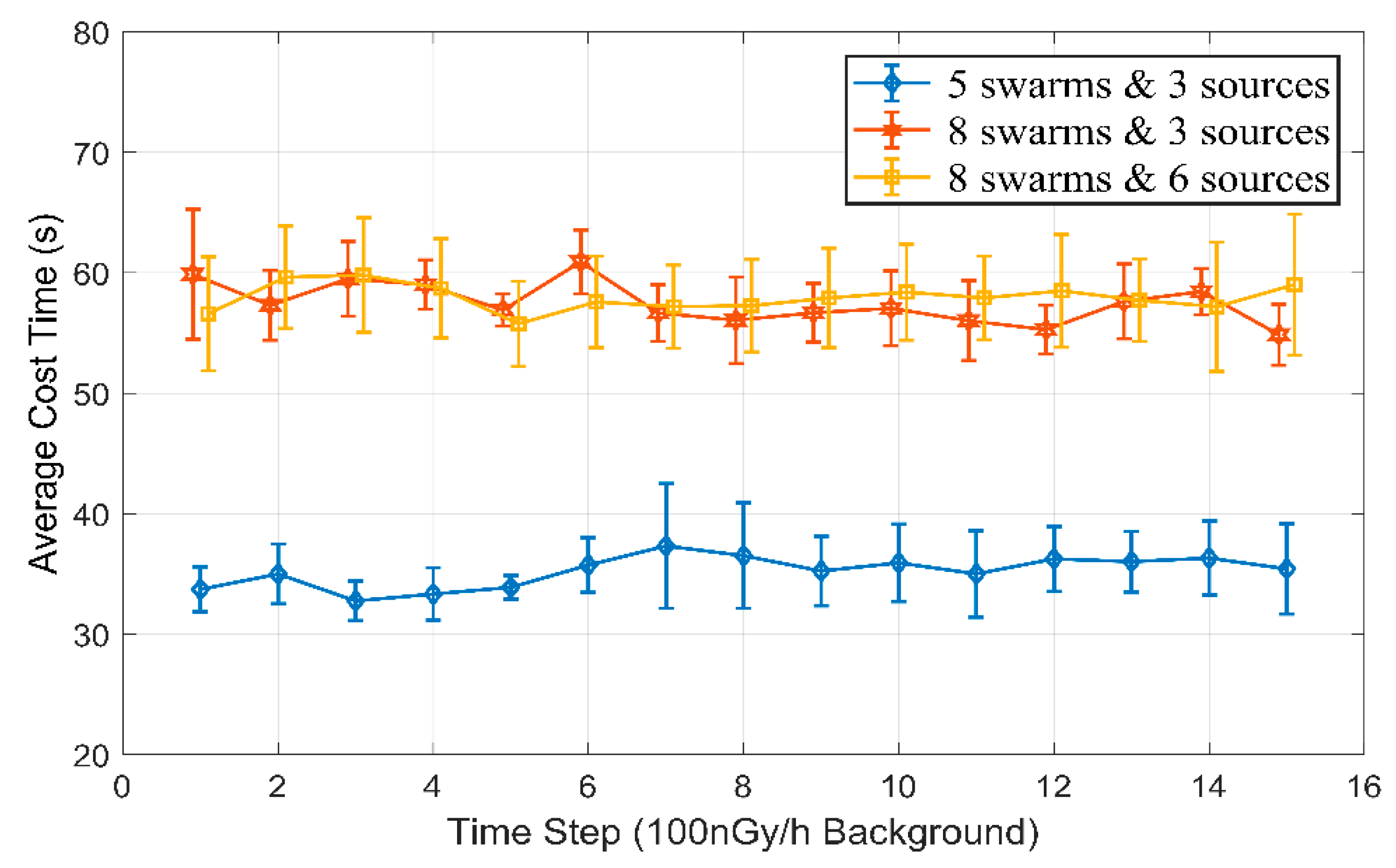
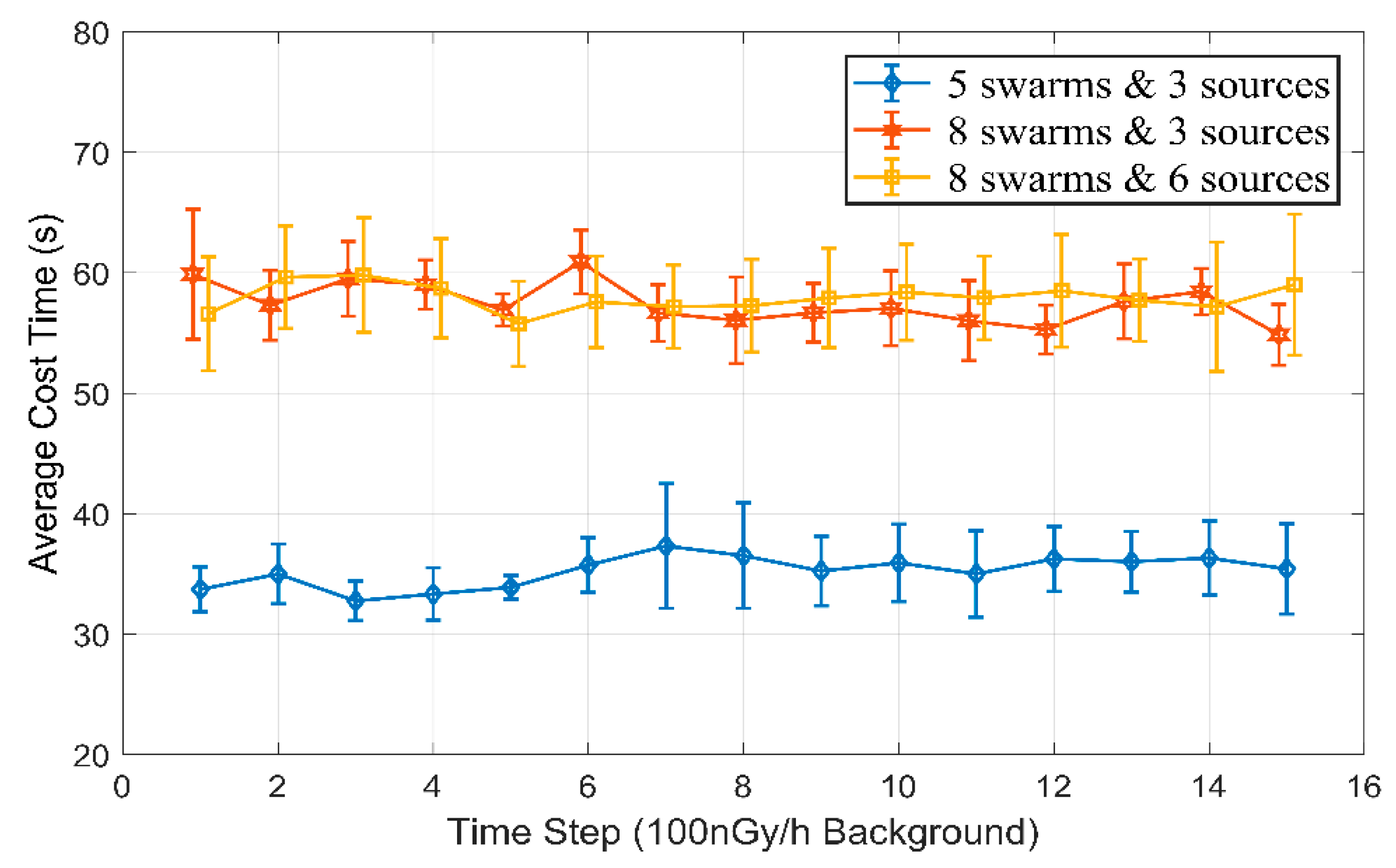
- Processing runtime are roughly linear to the pre-defined particle swarms number, while the number variation of actual radiation sources nearly does not change the estimation duration. The linear complexity with swarm number benefits from application of the multi-layer swarm structure, which transforms dimensional scalability into swarm number scalability.
- (ii)
- The average processing speed for particle swarm prediction is respectively 0.345 s, 0.342 s and 0.336 s in three cases, that is, the prediction period for one swarm estimation is almost the same. The phenomenon demonstrates once again that PSPF algorithm can handle the multi-sources localization problem in a linear complexity with the pre-estimated particle swarm number. Additionally, this fact also indicates that further timeliness research may focus on the operations in the swarm estimation procedure.
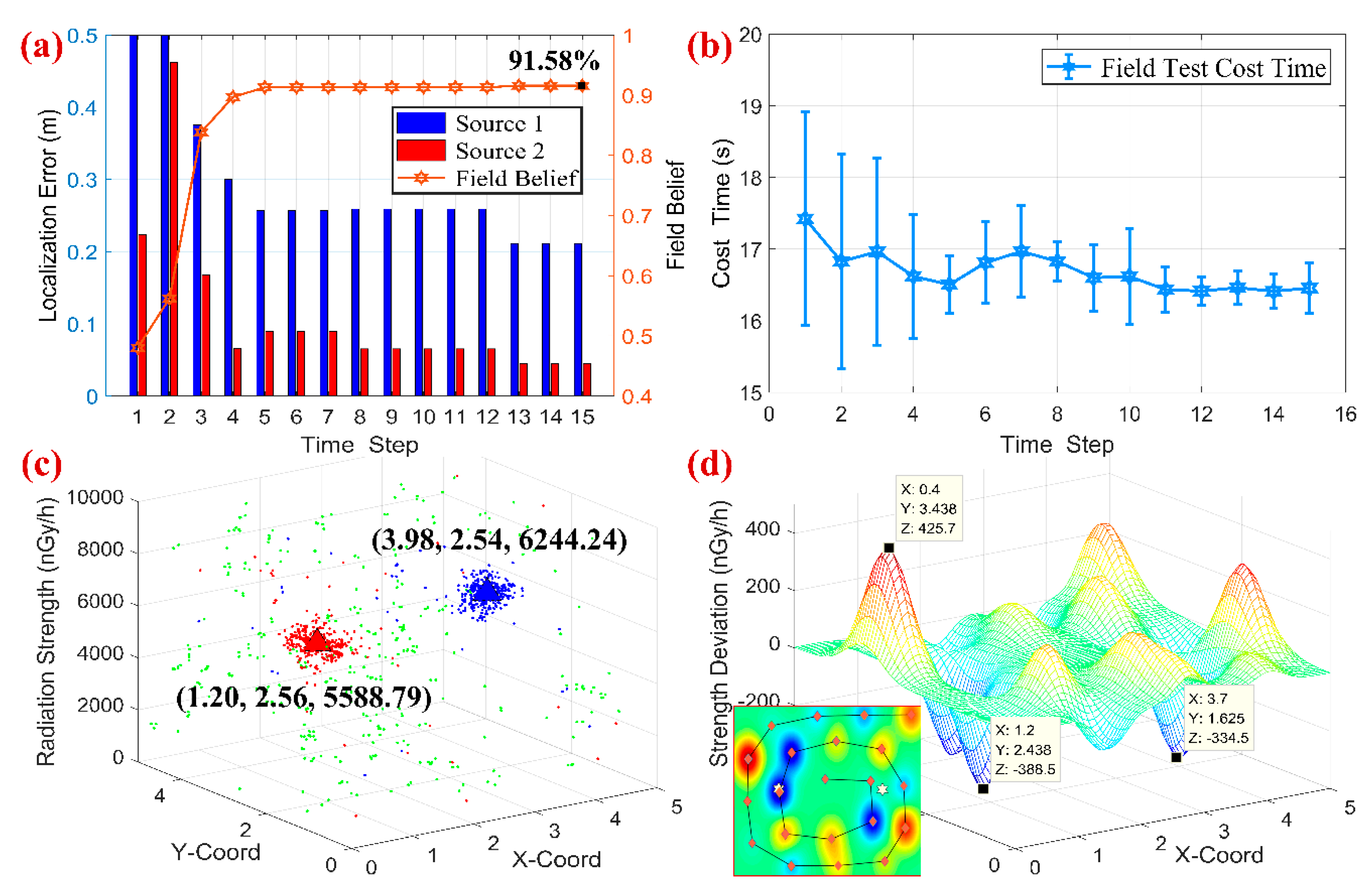
5.4. Field Experiment for Two Radiation Sources Localization
6. Conclusions
Author Contributions
Funding
Acknowledgments
References
- Murphy, R.R.; Peschel, J.; Arnett, C.; Martin, D. Projected Needs for Robot-Assisted Chemical, Biological, Radiological, or Nuclear (CBRN) Incidents. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012; IEEE: College Station, TX, USA, 2012; Volume 100, pp. 1–4. [Google Scholar]
- Deusdado, P.; Pinto, E.; Guedes, M.; Marques, F.; Rodrigues, P.; Lourenço, A.; Mendonça, R.; Silva, A.; Santana, P.; Corisco, J.; et al. An Aerial-Ground Robotic Team for Systematic Soil and Biota Sampling in Estuarine Mudflats. In Advances in Intelligent Systems and Computing; Springer: Berlin, Germany, 2016; Volume 418, pp. 15–26. [Google Scholar]
- Mayhorn, C.B.; McLaughlin, A.C. Warning the World of Extreme Events: A Global Perspective on Risk Communication for Natural and Technological Disaster. Saf. Sci. 2014, 61, 43–50. [Google Scholar] [CrossRef]
- Ruggiero, A.; Vos, M. Communication Challenges in CBRN Terrorism Crises: Expert Perceptions. J. Contingencies Crisis Manag. 2015, 23, 138–148. [Google Scholar] [CrossRef]
- Shah, D.; Scherer, S. Robust Localization of an Arbitrary Distribution of Radioactive Sources for Aerial Inspection. arXiv, 2017; arXiv:1710.01701. [Google Scholar]
- Baidoo-Williams, H.E. Maximum Likelihood Localization of Radiation Sources with Unknown Source Intensity. arXiv, 2016; arXiv:1608.00427. [Google Scholar]
- Baidoo-Williams, H.E.; Dasgupta, S.; Mudumbai, R.; Bai, E. On the Gradient Descent Localization of Radioactive Sources. IEEE Signal Process. Lett. 2013, 20, 1046–1049. [Google Scholar] [CrossRef]
- DeLuca, P.M. The international commission on radiation units and measurements. J. ICRU 2007, 7, v–vi. [Google Scholar] [PubMed]
- Wang, W.; Gao, W.; Wu, D.; Du, Z. Research on a Mobile Manipulator for Biochemical Sampling Tasks. Ind. Robot Int. J. 2017, 44, 467–478. [Google Scholar] [CrossRef]
- Rao, N.S.V.; Shankar, M.; Chin, J.C.; Yau, D.K.Y.; Ma, C.Y.T.; Yang, Y.; Hou, J.C.; Xu, X.; Sahni, S. Localization under Random Measurements with Application to Radiation Sources. In Proceedings of the 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008. [Google Scholar]
- Rao, N.S.V.; Sen, S.; Prins, N.J.; Cooper, D.A.; Ledoux, R.J.; Costales, J.B.; Kamieniecki, K.; Korbly, S.E.; Thompson, J.K.; Batcheler, J.; et al. Network Algorithms for Detection of Radiation Sources. Nucl. Instrum. Methods Phys. Res. A-Accel. Spectrom. Detect. Assoc. Equip. 2015, 784, 326–331. [Google Scholar] [CrossRef]
- Reggente, M.; Lilienthal, A.J. Using Local Wind Information for Gas Distribution Mapping in Outdoor Environments with a Mobile Robot. In Proceedings of the IEEE Sensors, Christchurch, New Zealand, 25–28 October 2009; pp. 1715–1720. [Google Scholar]
- Cao, N.; Low, K.H.; Dolan, J.M. Multi-Robot Informative Path Planning for Active Sensing of Environmental Phenomena: A Tale of Two Algorithms. AgBioForum 2013, 20, 1–11. [Google Scholar]
- Pahlajani, C.D.; Poulakakis, I.; Tanner, H.G. Networked Decision Making for Poisson Processes with Applications to Nuclear Detection. IEEE Trans. Autom. Control 2014, 59, 193–198. [Google Scholar] [CrossRef]
- Morelande, M.R.; Skvortsov, A. Radiation Field Estimation Using a Gaussian Mixture. In Proceedings of the 12th International Conference on Information Fusion (FUSION’09), Seattle, WA, USA, 6–9 July 2009; pp. 2247–2254. [Google Scholar]
- Morelande, M.; Ristic, B.; Gunatilaka, A. Detection and Parameter Estimation of Multiple Radioactive Sources. In Proceedings of the 10th International Conference on Information Fusion (FUSION 2007), Québec City, QC, Canada, 9–12 July 2007; pp. 1–7. [Google Scholar]
- Morelande, M.; Duckham, M.; Kealy, A.; Legg, J. Bayesian Path Estimation Using the Spatial Attributes of a Road Network. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Queensland, Australia, 19–24 April 2015; Volume 45, pp. 4090–4094. [Google Scholar]
- Hutchinson, M.; Oh, H.; Chen, W.-H. A Review of Source Term Estimation Methods for Atmospheric Dispersion Events Using Static or Mobile Sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef]
- Han, J.; Chen, Y. Multiple UAV Formations for Cooperative Source Seeking and Contour Mapping of a Radiative Signal Field. J. Intell. Robot. Syst. 2014, 74, 323–332. [Google Scholar] [CrossRef]
- Chin, J.-C.; Yau, D.K.Y.; Rao, N.S.V. Efficient and Robust Localization of Multiple Radiation Sources in Complex Environments. In Proceedings of the 31st International Conference on Distributed Computing Systems, Minneapolis, MN, USA, 20–24 June 2011; pp. 780–789. [Google Scholar]
- Comaniciu, D.; Meer, P. Mean Shift: A Robust Approach toward Feature Space Analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Vermaak, J.; Doucet, A.; Perez, P. Maintaining Multimodality through Mixture Tracking. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; Volume 2, pp. 1110–1116. [Google Scholar]
- Deb, B. Iterative Estimation of Location and Trajectory of Radioactive Sources with a Networked System of Detectors. IEEE Trans. Nucl. Sci. 2013, 60, 1315–1326. [Google Scholar] [CrossRef]
- Li, B.; Zhu, Y.; Wang, Z.; Li, C.; Peng, Z.-R.; Ge, L. Use of Multi-Rotor Unmanned Aerial Vehicles for Radioactive Source Search. Remote Sens. 2018, 10, 728. [Google Scholar] [CrossRef]
- Thompson, C.I.; Barritt, E.E.; Shenton-Taylor, C. Predicting the Air Fluorescence Yield of Radioactive Sources. Radiat. Meas. 2016, 88, 48–54. [Google Scholar] [CrossRef]
- Park, H.; Liu, J.; Johnson-Roberson, M.; Vasudevan, R. Robust Environmental Mapping by Mobile Sensor Networks. arXiv, 2017; arXiv:1711.07510. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A Tutorial on Particle Filters for Online Nonlinear/Nongaussian Bayesian Tracking. IEEE Trans. Signal Process. 2007, 50, 174–188. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics (Intelligent Robotics and Autonomous Agents Series); MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Kim, C.; Zimmer, H.; Pritch, Y.; Sorkine-Hornung, A.; Gross, M. Scene Reconstruction from High Spatio-Angular Resolution Light Fields. ACM Trans. Graph. 2013, 32. [Google Scholar] [CrossRef]
- Kristan, M.; Matas, J.; Leonardis, A.; Vojir, T.; Pflugfelder, R.; Fernandez, G.; Nebehay, G.; Porikli, F.; Cehovin, L. A Novel Performance Evaluation Methodology for Single-Target Trackers. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2137–2155. [Google Scholar] [CrossRef] [PubMed]
- Newaz, A.A.R.; Jeong, S.; Lee, H.; Ryu, H.; Chong, N.Y.; Mason, M.T. Fast Radiation Mapping and Multiple Source Localization Using Topographic Contour Map and Incremental Density Estimation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1515–1521. [Google Scholar]
- Newaz, A.A.R.; Jeong, S.; Chong, N.Y. Fast Radioactive Hotspot Localization Using a UAV. In Proceedings of the IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), San Francisco, CA, USA, 13–16 December 2016; pp. 9–15. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Background | Simulation Setting | |
|---|---|---|
| • size of surveillance area | 5 m × 5 m | |
| • origin of detection set | real-world measurements (spiral shape) | |
| • range of sources strength | 0~1500 nGy/h | |
| • number of particles in each swarm | 300 | |
| Scene 1 | • number of particle swarms | 5 |
| • number of radiation sources | 3 | |
| • parameters about sources | (1,2.25,790), (2.25,1,880), (2.75, 2.75,970) | |
| • simulation change factor | background radiation level (with 0, 50, 150, 250 nGy/h) | |
| Scene 2 | • number of particle swarms | 8 |
| • number of radiation sources | 6 | |
| • parameters about sources | (0.8,1.8,680), (2.5,2.5,870), (4.1,3.8,720), (2.0,4.3,670), (4.6,2.0,565), (1.8,0.6,820) | |
| • simulation change factor | large number of radiation sources | |
| Scene 3 | • number of particle swarms | 5/8 |
| • number of radiation sources | 3/6 | |
| • parameters about sources | similar to scene 1/scene 2 | |
| • simulation change factor | processing runtime | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, W.; Wang, W.; Zhu, H.; Huang, G.; Wu, D.; Du, Z. Robust Radiation Sources Localization Based on the Peak Suppressed Particle Filter for Mixed Multi-Modal Environments. Sensors 2018, 18, 3784. https://doi.org/10.3390/s18113784
Gao W, Wang W, Zhu H, Huang G, Wu D, Du Z. Robust Radiation Sources Localization Based on the Peak Suppressed Particle Filter for Mixed Multi-Modal Environments. Sensors. 2018; 18(11):3784. https://doi.org/10.3390/s18113784
Chicago/Turabian StyleGao, Wenrui, Weidong Wang, Hongbiao Zhu, Guofu Huang, Dongmei Wu, and Zhijiang Du. 2018. "Robust Radiation Sources Localization Based on the Peak Suppressed Particle Filter for Mixed Multi-Modal Environments" Sensors 18, no. 11: 3784. https://doi.org/10.3390/s18113784
APA StyleGao, W., Wang, W., Zhu, H., Huang, G., Wu, D., & Du, Z. (2018). Robust Radiation Sources Localization Based on the Peak Suppressed Particle Filter for Mixed Multi-Modal Environments. Sensors, 18(11), 3784. https://doi.org/10.3390/s18113784