A Novel RPL Algorithm Based on Chaotic Genetic Algorithm


Abstract
1. Introduction
- (1)
- A composition metric is proposed, which simultaneously considers packet queue length in the buffer, end-to-end delay, residual energy ratio of nodes, number of hops, and expected transmission count (ETX) when selecting preferred parents (the next hop). These five routing metrics have a significant effect on routing decisions. Hence, to choose the best paths, all of the routing metrics mentioned above should be evaluated comprehensively.
- (2)
- The routing algebra theoretical framework which ensures consistency, optimality, and no-loop for the newly-proposed routing metrics is analyzed.
- (3)
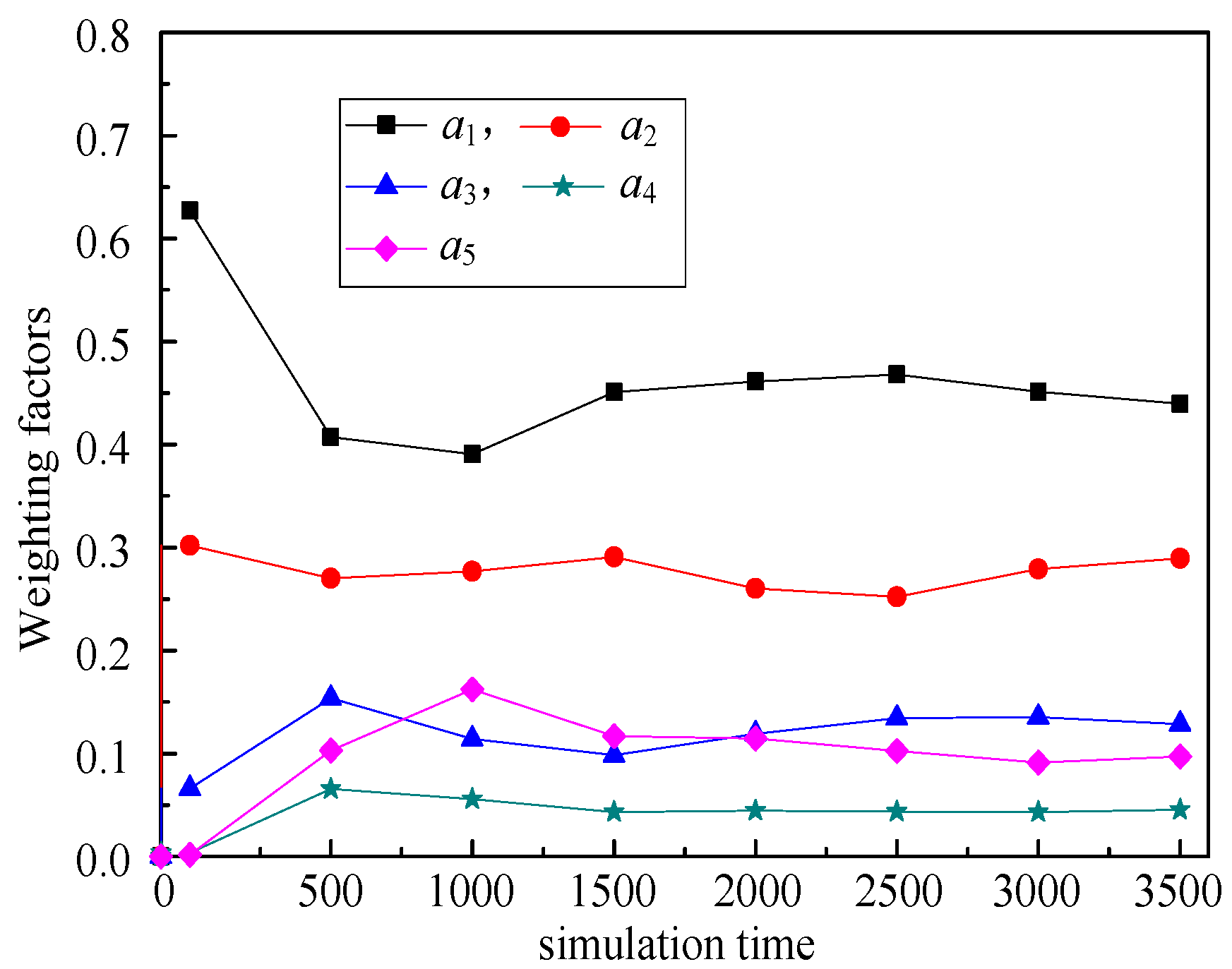
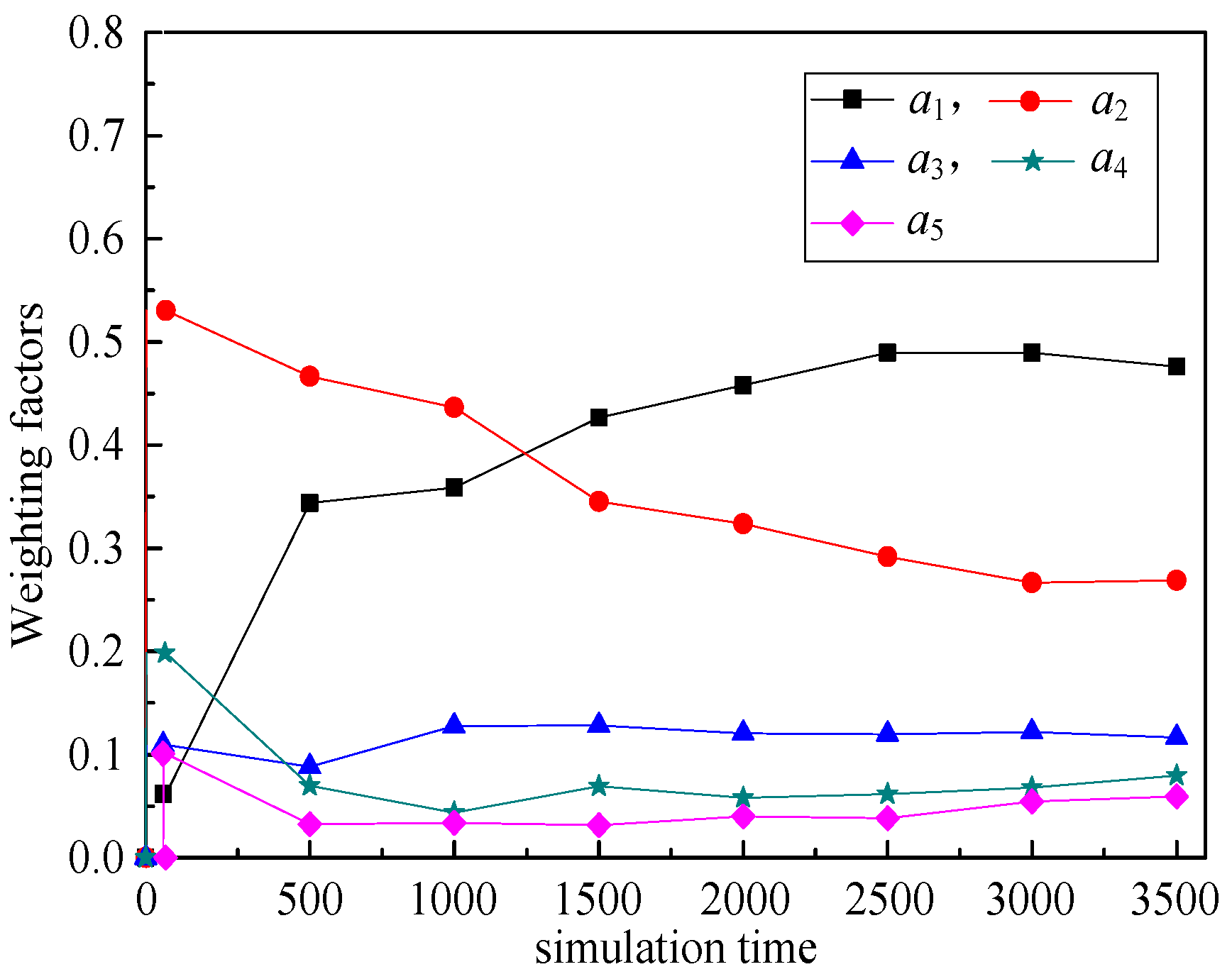
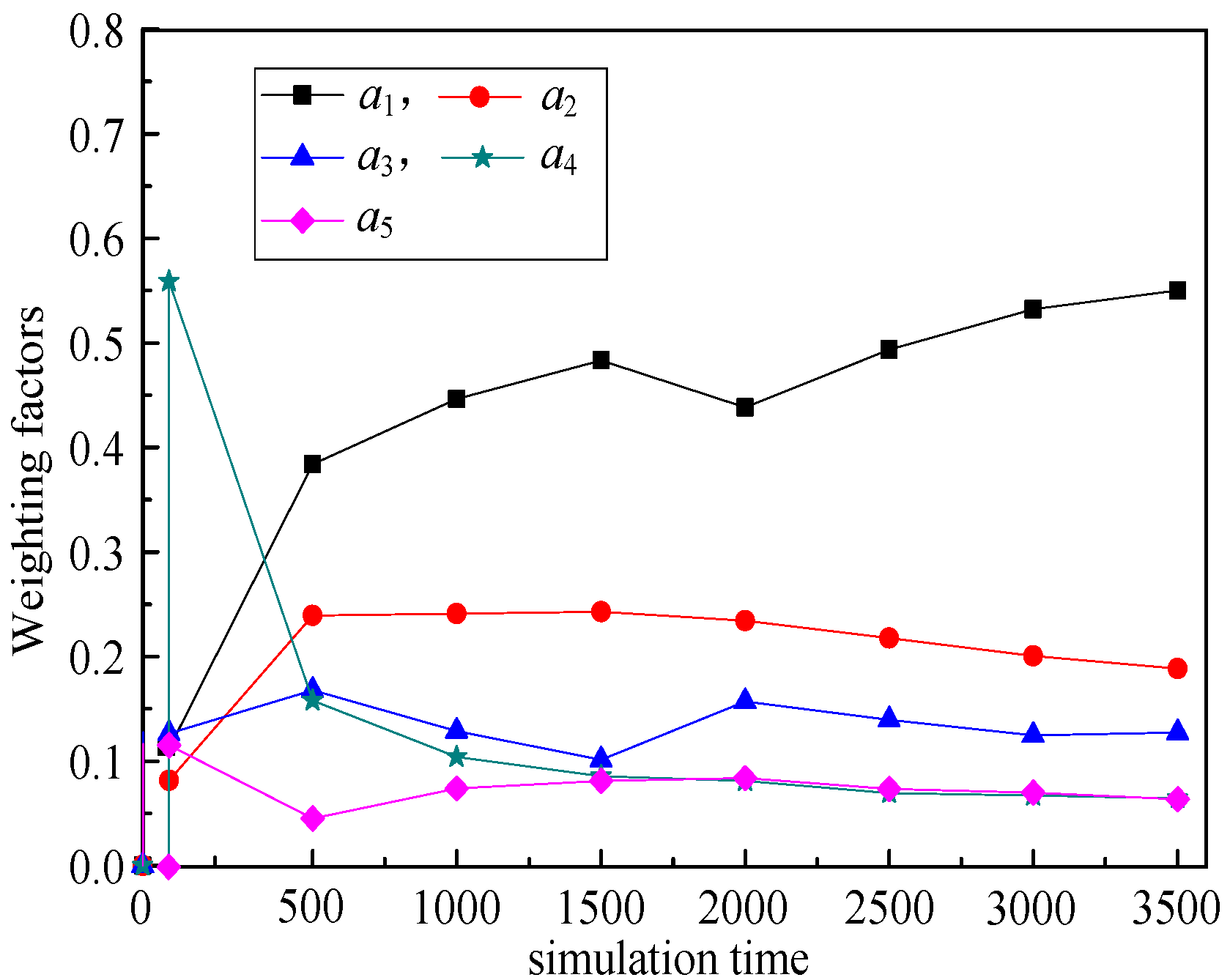
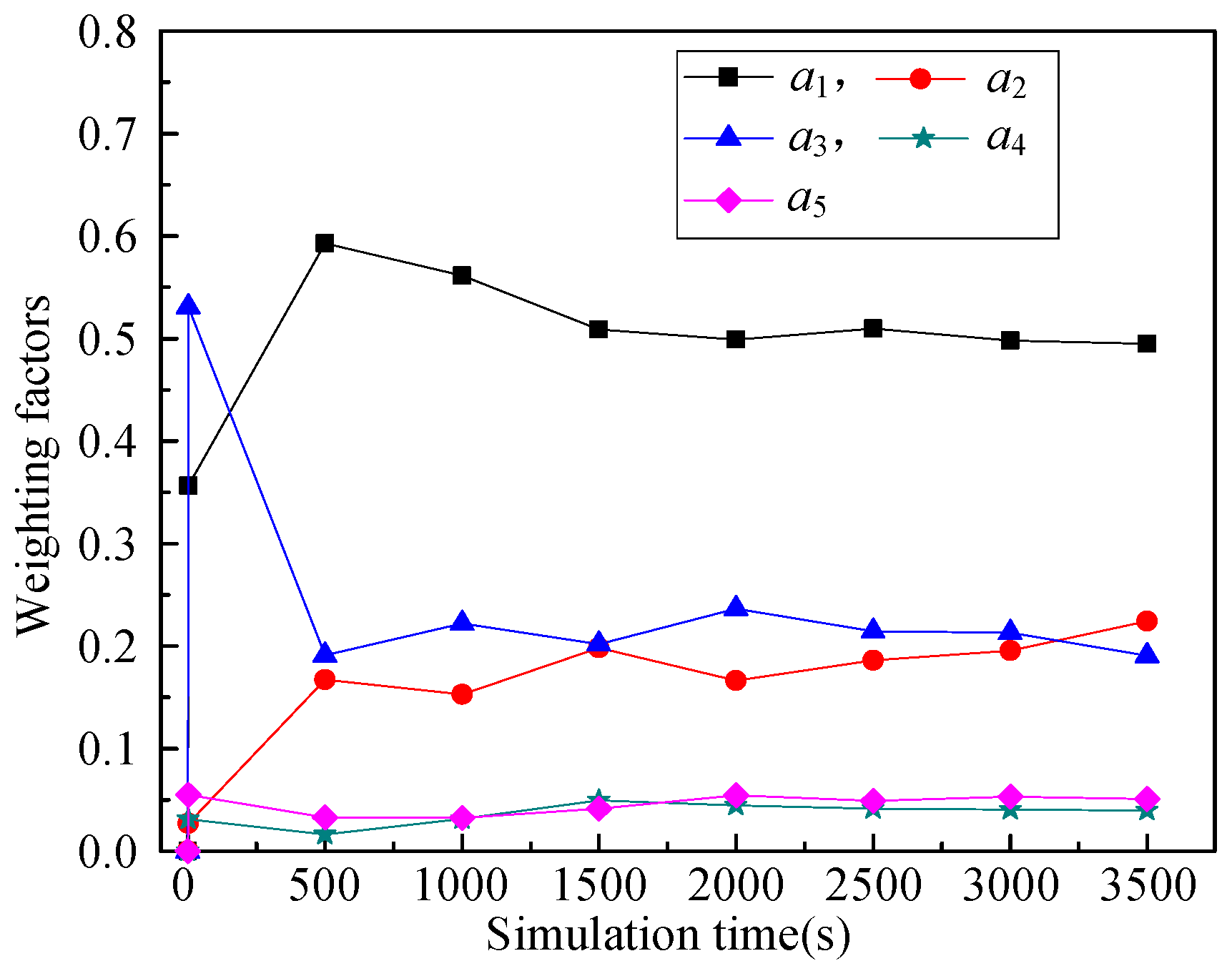
- RPL-CGA uses a chaotic genetic algorithm to determine weighting factors of routing metrics in composition metrics to comprehensively evaluate candidate parents (neighbors) when selecting preferred parents. In this way, the best weighting factors allocation scheme can be obtained. Then, among many candidate parents (neighbors), the optimal preferred parent (the next hop) can be selected.
- (4)
- A new holistic objective function is proposed. This objective function can provide a better description of the optimal routes to destination nodes, and can also provide a more comprehensive evaluation of candidate parents when selecting preferred parents.
- (5)
- A new method for calculating the rank values of nodes is proposed. Here, rank values are used to construct the network topologies and select the preferred parent (the next hop).
- (6)
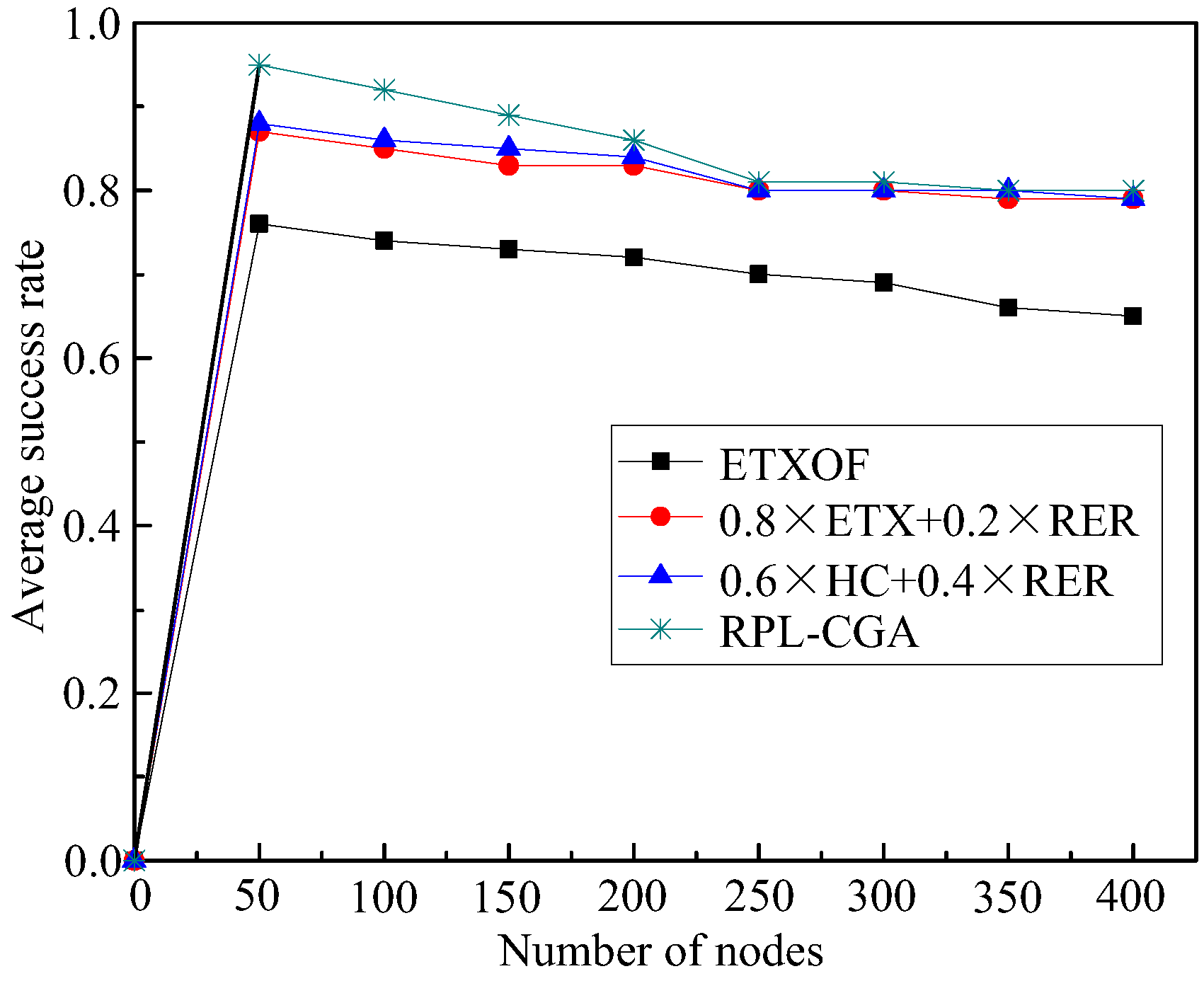
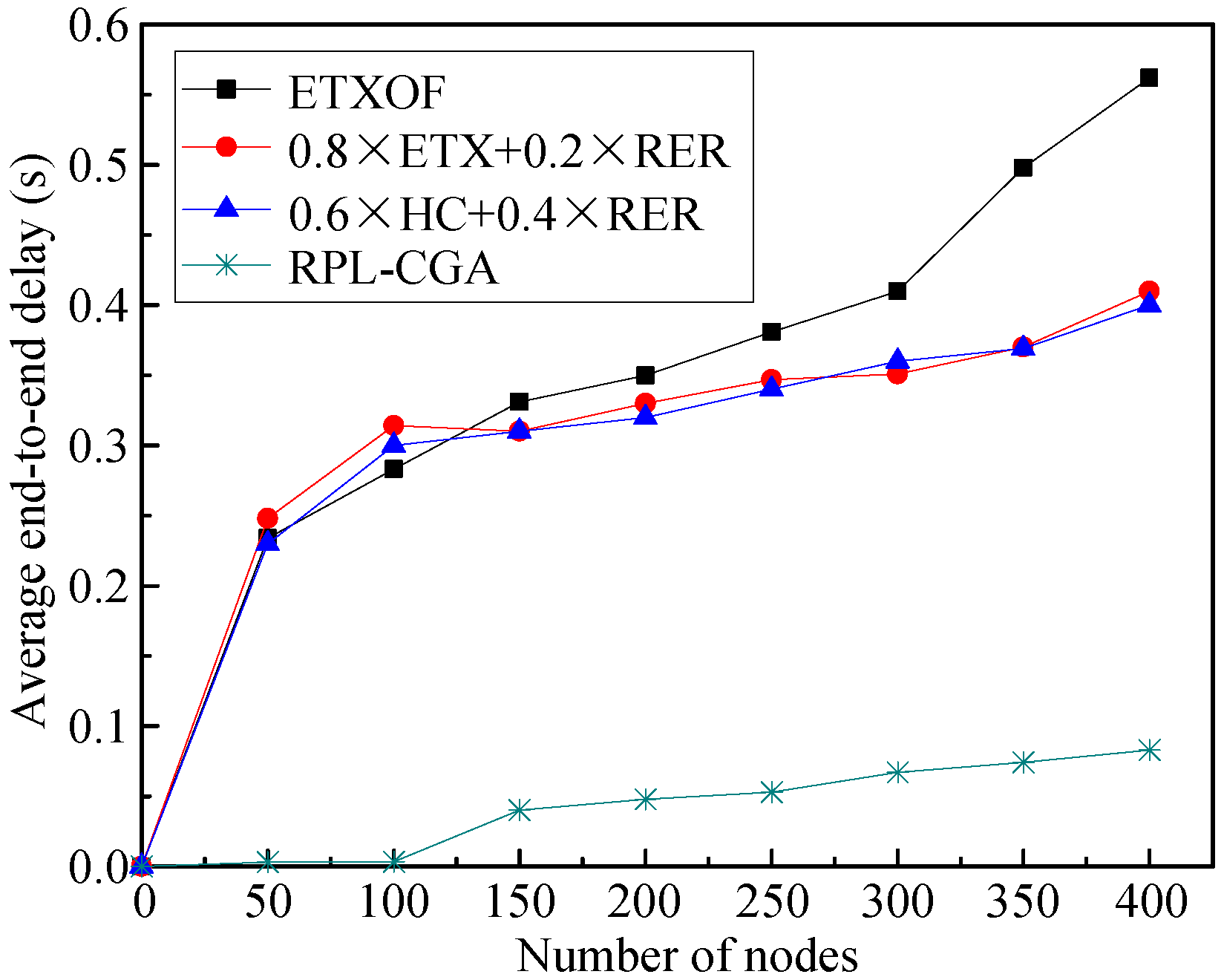
- Simulation studies of RPL-CGA and several typical existing relevant routing algorithms are carried out in this paper. Simulation results demonstrate that RPL-CGA is superior to these typical existing relevant routing algorithms, and can obtain considerable enhancement on network performance of LLNs in the aspects of average end-to-end delay, average success rate, etc.
2. Overview and Problems of RPL
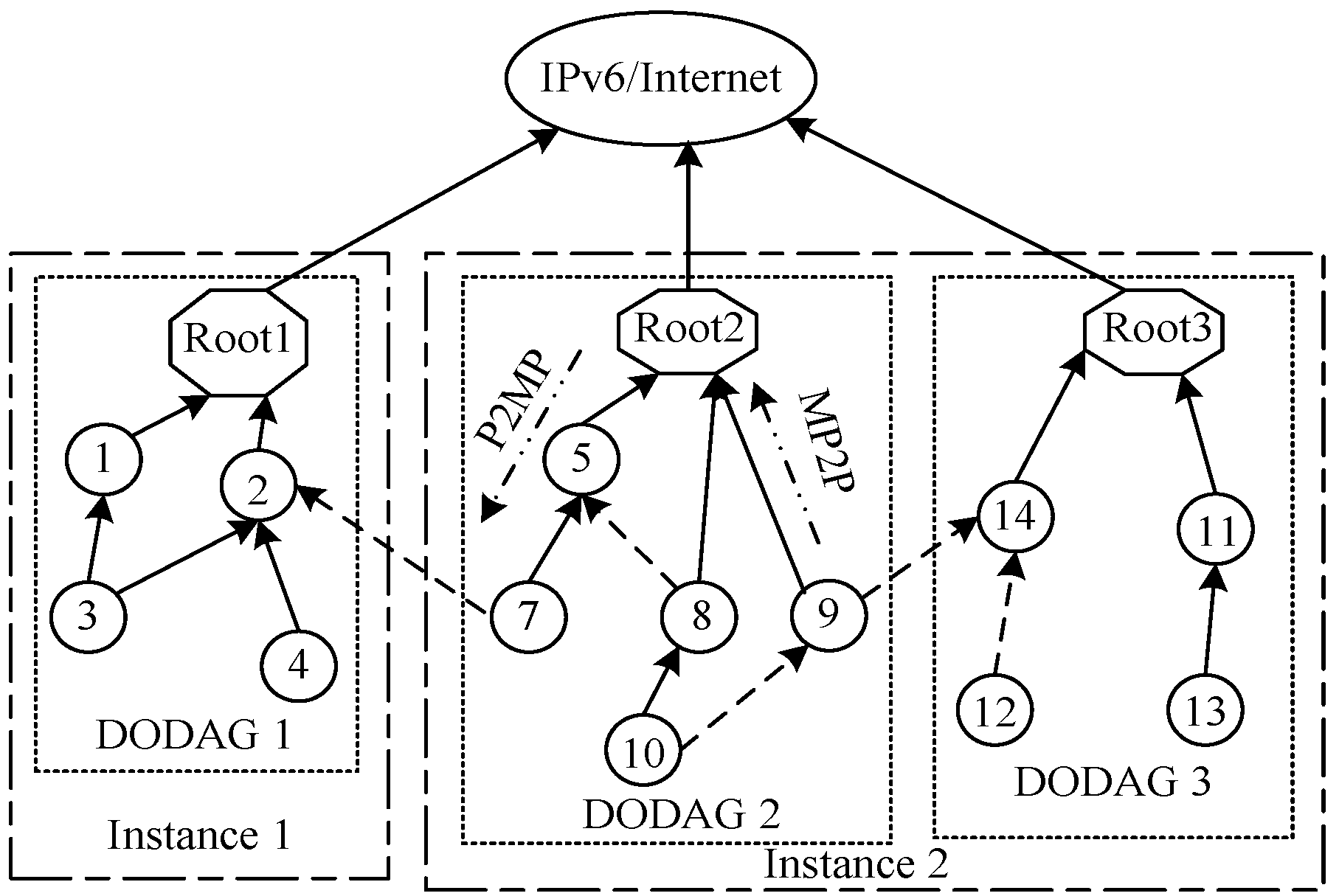
2.1. Introduction of RPL
- (1)
- How to get and update routing metrics information;
- (2)
- How to calculate the rank of node (the individual position of the node relative to root in DODAG);
- (3)
- How to choose the node’s preferred parent (the next hop node).
2.2. Problems
- (1)
- Node chooses the candidate parent with smallest path cost as preferred parent;
- (2)
- If one node already selected a preferred parent but there is another candidate parent with the minimum path costing less than the selected preferred parent, then before changing its preferred parent, the node shall first compare the difference value of path cost between the minimum path cost candidate parent and the selected preferred parent. Then, if the difference value is greater than the pre-set threshold, the node chooses this minimum path cost candidate parent as its new preferred parent. Otherwise, the node still uses its current preferred parent.
- (1)
- Packet queue length in buffer, end-to-end delay, residual energy ratio of nodes, number of hops, and expected transmission count (ETX) all have an important influence on routing selection. However, the recent improvements of RPL only consider two or three routing metrics. So, the optimal routes are hard to select, and the network performance is affected to some extent.
- (2)
- It is too subjective that the weighting factor of each routing metric is decided by the personal experiences of experts. There is no definite analysis and basis about weighting factors distribution theory of each routing metric used in composition metric.
- (3)
- The weighting factors of routing metrics cannot be dynamically adjusted according to network changes. Therefore, the network performances are affected to a certain extent.
3. RPL-CGA
3.1. Outlines of RPL-CGA
- (1)
- Analyzing CGA.
- (2)
- Analyzing the requirements that RPL routing metrics should meet.
- (3)
- Proposing which routing metrics should be considered in RPL-CGA.
- (4)
- Proposing novel composition metric and objective function.
- (5)
- Using the chaotic genetic algorithm to optimize the weighting factor of each routing metric in the composition metric.
- (6)
- Calculating rank values of nodes according to the newly-proposed objective function.
- (7)
- Choosing the preferred parents based on rank values of nodes.
3.2. CGA
- (1)
- The period of the periodic point of f has no upper bound.
- (2)
- Existing uncountable subset , there is no periodic point in S, and the following conditions are met:
- ①
- , ;
- ②
- , , ;
- ③
- , y is any periodic point of f, .
3.3. Requirements for RPL-CGA Routing Metrics
3.4. Routing Metrics Considered in RPL-CGA
3.5. Proposing Composition Metric and Objective Function
3.6. Optimizing Weighting Factors of Routing Metrics
3.7. Calculating Rank of Nodes
3.8. Selecting Preferred Parents
- (1)
- According to Equation (19), if the value of current preferred parent is greater than the value of one candidate parent, but the difference between them is less than the preferred parent change threshold, then the current preferred parent will not be changed.
- (2)
- If the calculated value of Equation (19) is greater than 100 or less than 1, then the corresponding candidate parent must be removed from the candidate parent set.
- (3)
- If several candidate parents have the same minimum calculated values of Equation (19), then an additional metric named as NSA (Node State Attribute, NSA) will be considered to choose the next hop among these several candidate parents.
- (4)
- According to Equation (19), if the value of the current preferred parent is equal to the minimum value, and there are several candidate parents also with the minimum value, then the node still uses its current preferred parent.
- (5)
- If node c only has one candidate parent, then c should wait for some time to receive DIO messages broadcast by other nodes to determine whether there are other nodes that will become its candidate parents. After that, if c has two or more candidate parents, c selects a preferred parent through RPL-CGA algorithm. Otherwise, if c still has one candidate parent, it directly selects only one candidate parent as its preferred parent without executing the RPL-CGA algorithm.
4. Performance Evaluation
4.1. Statistical Experimetal Indicators
4.2. Statistical Experimetal Indicators
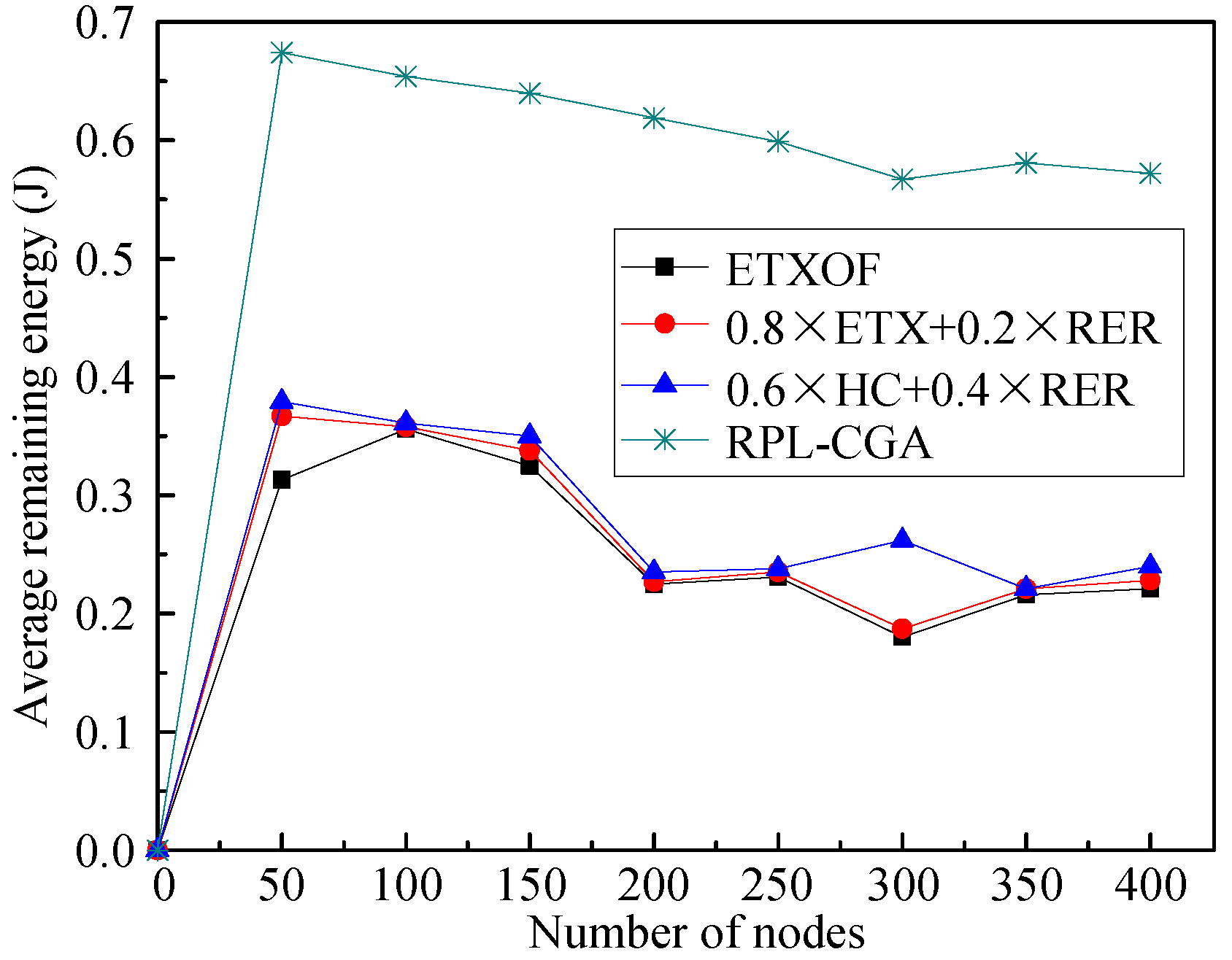
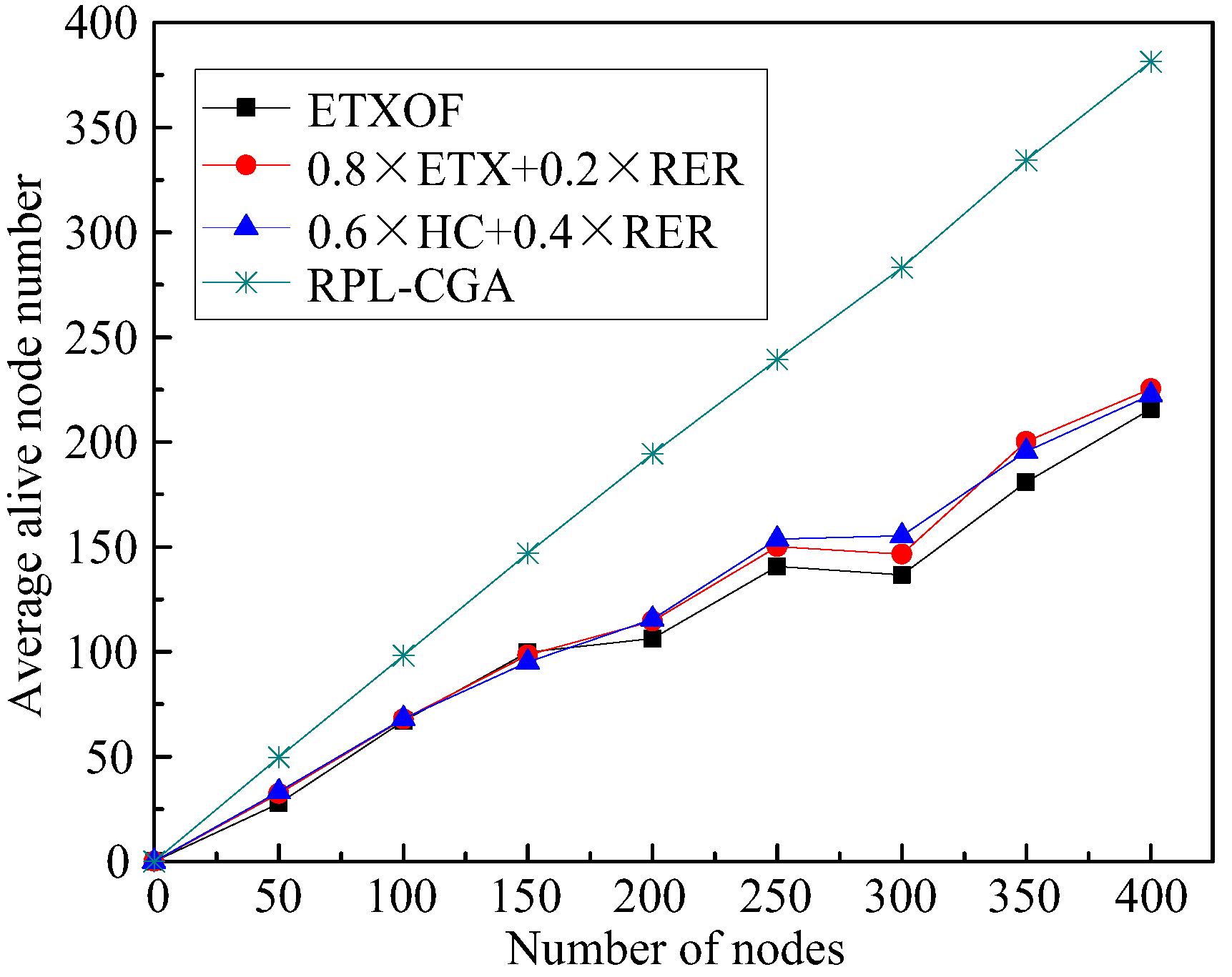
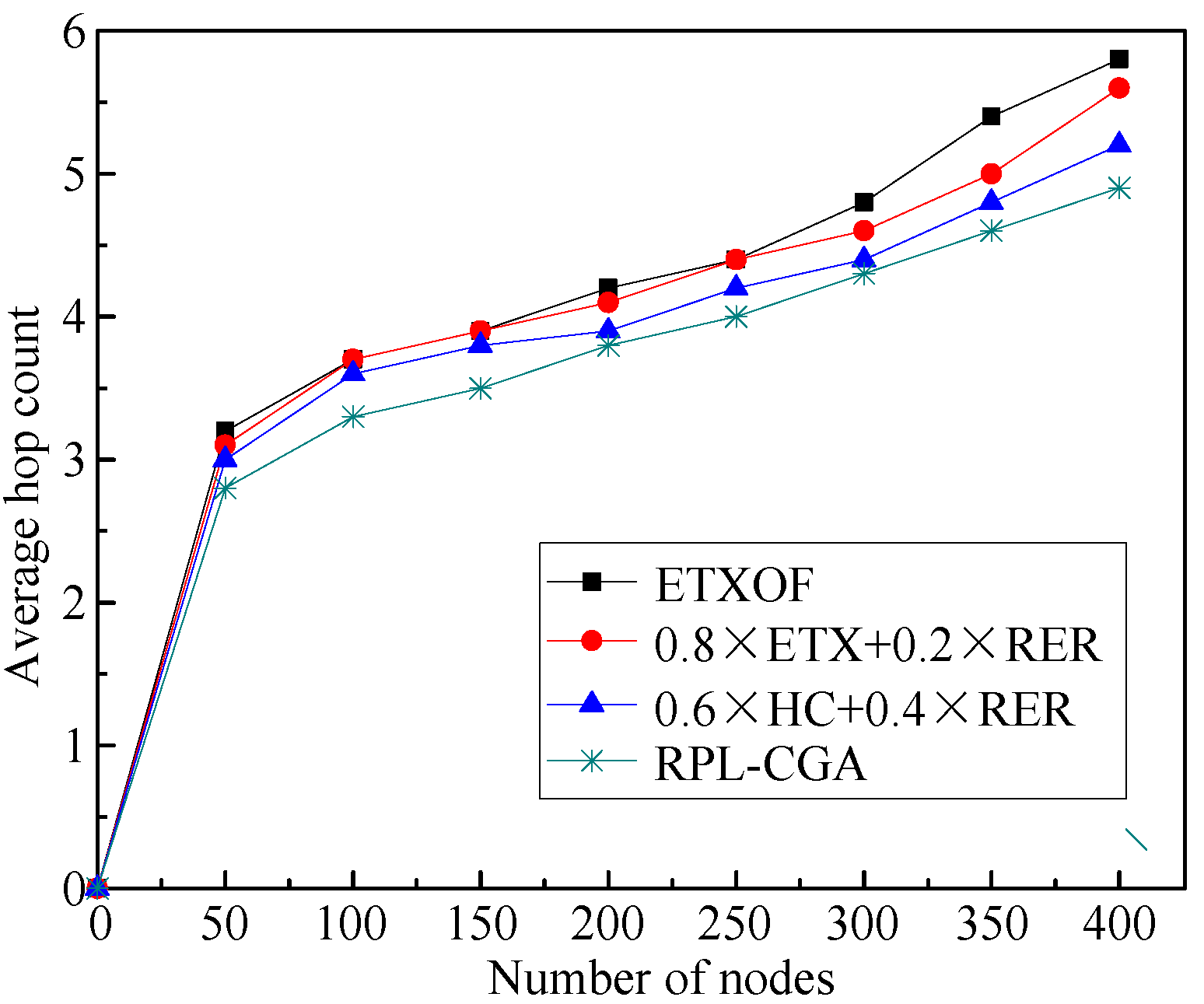
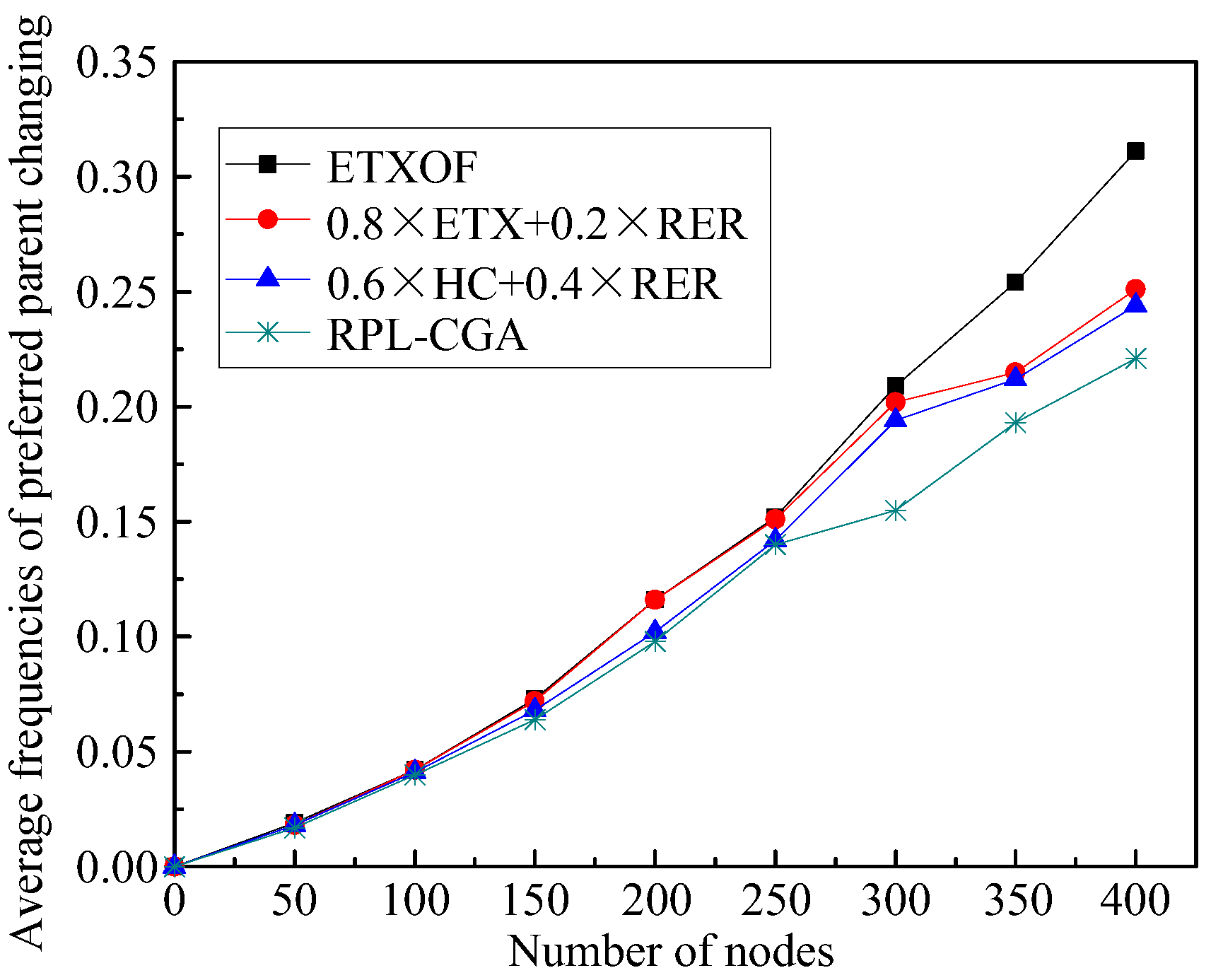
4.3. Results and Discuss
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khan, M.M.; Lodhi, M.A.; Rehman, A.; Khan, A.; Hussain, F.B. Sink-to-sink coordination framework using RPL: Routing protocol for low power and lossy networks. J. Sens. 2016, 2016, 2635429. [Google Scholar] [CrossRef]
- Lorente, G.G.; Lemmens, B.; Carlier, M.; Braeken, A.; Steenhaut, K. BMRF: Bidirectional Multicast RPL Forwarding. Ad Hoc Netw. 2017, 54, 69–84. [Google Scholar] [CrossRef]
- Winter, T.; Thubert, P.; Brandt, A.; Hui, J.; Kelsey, R.; Levis, P.; Pister, K.; Struik, R.; Vasseur, J.P.; Alexander, R. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. Internet Eng. Task Force (IETF) 2012. [Google Scholar] [CrossRef]
- Zhao, M.; Kumar, A.; Chong, P.H.; Lu, R. A comprehensive study of RPL and P2P-RPL routing protocols: Implementation, challenges and opportunities. Peer-to-Peer Netw. Appl. 2017, 10, 1232–1256. [Google Scholar] [CrossRef]
- Nassar, J.; Berthomé, M.; Dubrulle, J.; Gouvy, N.; Mitton, N.; Quoitin, B. Multiple Instances QoS Routing in RPL: Application to Smart Grids. Sensors 2018, 18, 2472. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Wu, M. An Improved Algorithm of RPL Based on Triangle Module Operator for AMI Networks. IEICE Trans. Commun. 2018, 101, 1602–1611. [Google Scholar] [CrossRef]
- Zhao, M.; Chong, P.H.J.; Chan, H.C.B. An energy-efficient and cluster-parent based RPL with power-level refinement for low-power and lossy networks. Comput. Commun. 2017, 104, 17–33. [Google Scholar] [CrossRef]
- Nejad, H.M.; Movahhedinia, N.; Khayyambashi, M.R. Improving the reliability of wireless data communication in Smart Grid NAN. Peer-to-Peer Netw. Appl. 2017, 10, 1021–1033. [Google Scholar] [CrossRef]
- Miguel, M.L.; Jamhour, E.; Pellenz, M.E.; Penna, M.C. A Power Planning Algorithm Based on RPL for AMI Wireless Sensor Networks. Sensors 2017, 17, 679. [Google Scholar] [CrossRef] [PubMed]
- Farooq, M.O.; Sreenan, C.J.; Brown, K.N.; Kunz, T. Design and analysis of RPL objective functions for multi-gateway ad-hoc low-power and lossy networks. Ad Hoc Netw. 2017, 65, 78–90. [Google Scholar] [CrossRef]
- Gaddour, O.; Koubâa, A.; Abid, M. Quality-of-service aware routing for static and mobile ipv6-based low-power and lossy sensor networks using RPL. Ad Hoc Netw. 2015, 33, 233–256. [Google Scholar] [CrossRef]
- Ghaleb, B.; Al-Dubai, A.; Romdhani, I.; Ghaleb, B. Load Balancing Objective Function in RPL. Available online: https://f.glgoo.top/scholar?hl=zh-CN&as_sdt=0,5&cluster=13682875726362249787 (accessed on 27 October 2018).
- Thubert, P. Objective function zero for the routing protocol for low-power and lossy networks (RPL). Internet Eng. Task Force (IETF) RFC6552. 2012. [Google Scholar] [CrossRef]
- Gnawali, O.; Levis, P. The ETX Objective Function for RPL. Available online: https://f.glgoo.top/scholar?hl=zh-CN&as_sdt=0%2C5&q=The+ETX+objective+function+for+RPL&btnG= (accessed on 27 October 2018).
- Gnawali, O.; Levis, P. The minimum rank with hysteresis objective function. Internet Eng. Task Force (IETF) RFC 6719. 2012. [Google Scholar] [CrossRef]
- Vasseur, J.P.; Kim, M.; Pister, K.; Dejean, N.; Barthel, D. Routing Metrics Used for Path Calculation in Low-Power and Lossy Networks. Internet Eng. Task Force (IETF) RFC 6551. 2012. [Google Scholar] [CrossRef]
- Trakadas, P.; Zahariadis, T. Design Guidelines for Routing Metrics Composition in LLN. Available online: https://tools.ietf.org/html/draft-zahariadis-roll-metrics-composition-04 (accessed on 27 October 2018).
- Hassan, A.; Alshomrani, S.; Altalhi, A.; Ahsan, S. Improved routing metrics for energy constrained interconnected devices in low-power and lossy networks. J. Commun. Netw. 2016, 18, 327–332. [Google Scholar]
- Velivasaki, T.H.; Karkazis, P.; Zahariadis, T.V.; Trakadas, P.T.; Capsalis, C.N. Trust-aware and link-reliable routing metric composition for wireless sensor networks. Trans. Emerg. Telecommun. Technol. 2014, 25, 539–554. [Google Scholar] [CrossRef]
- Karkazis, P.; Trakadas, P.; Leligou, H.C.; Sarakis, L.; Papaefstathiou, I.; Zahariadis, T. Evaluating routing metric composition approaches for QoS differentiation in low power and lossy networks. Wirel. Netw. 2013, 19, 1269–1284. [Google Scholar] [CrossRef]
- Karkazis, P.; Leligou, H.C.; Sarakis, L.; Zahariadis, T.; Trakadas, P.; Velivassaki, T.H.; Capsalis, C. Design of primary and composite routing metrics for rpl-compliant wireless sensor networks. In Proceedings of the Telecommunications and Multimedia (TEMU), Chania, Greece, 30 July–1 August 2012; pp. 13–18. [Google Scholar]
- Gouda, M.G.; Schneider, M. Maximizable routing metrics. IEEE/ACM Trans. Netw. (TON) 2003, 11, 663–675. [Google Scholar] [CrossRef]
- Zeng, T.; Chang, S.; Fan, H.; Liu, Q. Design and Processing of a Novel Chaos-Based Stepped Frequency Synthesized Wideband Radar Signal. Sensors 2018, 18, 985. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Kim, K.Y.; Shin, O.S.; Shin, Y. Device-to-device resource allocation in LTE-advanced networks by hybrid particle swarm optimization and genetic algorithm. Peer-to-Peer Netw. Appl. 2016, 9, 945–954. [Google Scholar] [CrossRef]
- Gao, L.; Zhou, Z.F.; Huang, Q.A. A Generalized Polynomial Chaos-Based Approach to Analyze the Impacts of Process Deviations on MEMS Beams. Sensors 2017, 17, 2561. [Google Scholar]
- Tang, L.; Feng, S.; Hao, J.; Zhao, X. Energy-efficient routing algorithm based on multiple criteria decision making for wireless sensor networks. Wirel. Pers. Commun. 2015, 80, 97–115. [Google Scholar] [CrossRef]
- Hou, J.; Jadhav, R.; Luo, Z. Optimization of Parent-node Selection in RPL-based Networks. Available online: https://f.glgoo.top/scholar?hl=zh-CN&as_sdt=0%2C5&q=Optimization+of+Parent-node+Selection+in+RPL-based+Networks&btnG= (accessed on 27 October 2018).
- Nayak, P.; Devulapalli, A. A fuzzy logic-based clustering algorithm for WSN to extend the network lifetime. IEEE Sens. J. 2016, 16, 137–144. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ICMPV6 Control Messages | Functions |
|---|---|
| DAO (Destination Advertisement Object) | Transmitting destination address information and constructing upward routes |
| DIO (DODAG Information Object) | Containing some information that used to detect RPL Instance, obtain relevant configuration parameters, select candidate parent set, maintaining DODAG, etc. |
| DIS (DODAG Information Solicitation) | soliciting DIOs from neighbors in LLNs |
| DAO-ACK (Destination Advertisement Object Acknowledgement) | Informing DAO sender that DAO has been received |
| Parameter | Value |
|---|---|
| Network scenario (m2) | 500 × 500 |
| Dead node | Residual energy less than 5% of its initial energy |
| Maximum number of iteration k | 100 |
| Cross probability Pc | 0.75 |
| Mutation probability Pm | 0.001 |
| Population size w | 100 |
| Simulation time (s) | 3000 |
| Maximum queue length (packet number) | 16 |
| Minimum queue length (packet number) | 0 |
| Communication radius (m) | 150 |
| Node number | 50, 100, 150, 200, 250, 300, 350, 400 |
| Packet size (kbits) | 0.1 |
| Energy loss for relaying y bit message | E(y,d) |
| Parameter | Value |
|---|---|
| Eelec | 50 nJ/bit |
| εamp | 10 pJ/bit/m2 |
| εfs | 0.0013 pJ/bit/m4 |
| d0 | 87 m |
| d | communication distance |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Wu, M. A Novel RPL Algorithm Based on Chaotic Genetic Algorithm. Sensors 2018, 18, 3647. https://doi.org/10.3390/s18113647
Cao Y, Wu M. A Novel RPL Algorithm Based on Chaotic Genetic Algorithm. Sensors. 2018; 18(11):3647. https://doi.org/10.3390/s18113647
Chicago/Turabian StyleCao, Yanan, and Muqing Wu. 2018. "A Novel RPL Algorithm Based on Chaotic Genetic Algorithm" Sensors 18, no. 11: 3647. https://doi.org/10.3390/s18113647
APA StyleCao, Y., & Wu, M. (2018). A Novel RPL Algorithm Based on Chaotic Genetic Algorithm. Sensors, 18(11), 3647. https://doi.org/10.3390/s18113647