An Infrastructure-Free Indoor Localization Algorithm for Smartphones


Abstract
1. Introduction
- We performed an in-depth study of both the advantageous properties and the challenges in leveraging the magnetic field and ambient light intensity for indoor localization. Based on these studies, we extracted the hybrid features of indoor ambient light and magnetic field signals within one or several steps to construct a hybrid fingerprint model as a location-specific signature.
- We designed a long trajectory calibration scheme based on an undirected weighted graph model. The undirected weighted graph model was constructed to reduce the computational overhead resulting from long trajectory matching (LTM. A result validation of trajectory matching was also designed to filter the DTW output and identify which LTM result is accurate. Lastly, the heading and step length were calibrated by the matched trajectory.
- We proposed a single-step tracking algorithm based on the hybrid fingerprints model and the particle filter framework. The weight of particle filters was updated by the hybrid fingerprints model that not only alleviates sunlight interference but also enhances the location differentiation ability in large open-plan areas. The cumulative error of the particle filters was calibrated by the result of the long trajectory calibration scheme.
- We implemented LiMag entirely on the Android platform and conducted extensive experiments in multiple scenarios, including a large open-plan area as well as an environment characterized by strong sunlight, and the results showed that LiMag achieved an accuracy of 1.8∼3.5 m in typical indoor scenarios.
2. Insights on Visible Light and Magnetic Fields
2.1. Favorable Properties and Challenges of Visible Light
2.1.1. Favorable Properties
2.1.2. Challenges
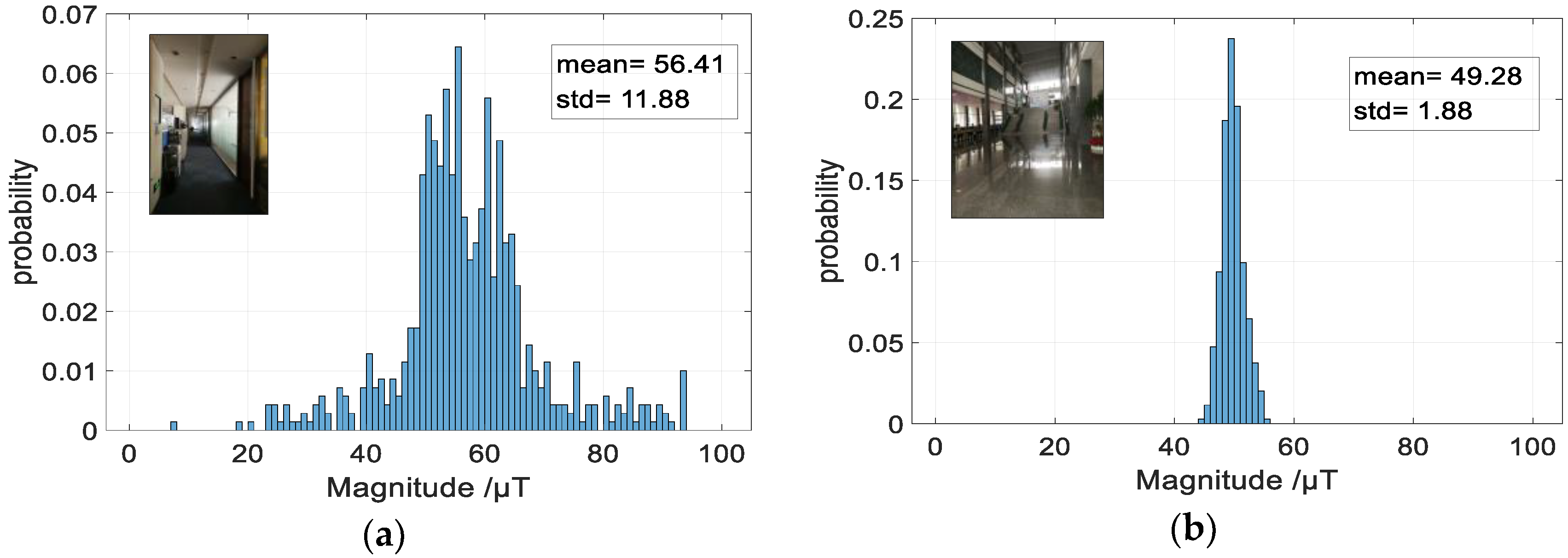
2.2. Favorable Properties and Challenges of Magnetic Field
2.2.1. Favorable Properties
2.2.2. Challenges
2.3. Fusion of Light Intensity and Magnetic Field
3. Positioning Model
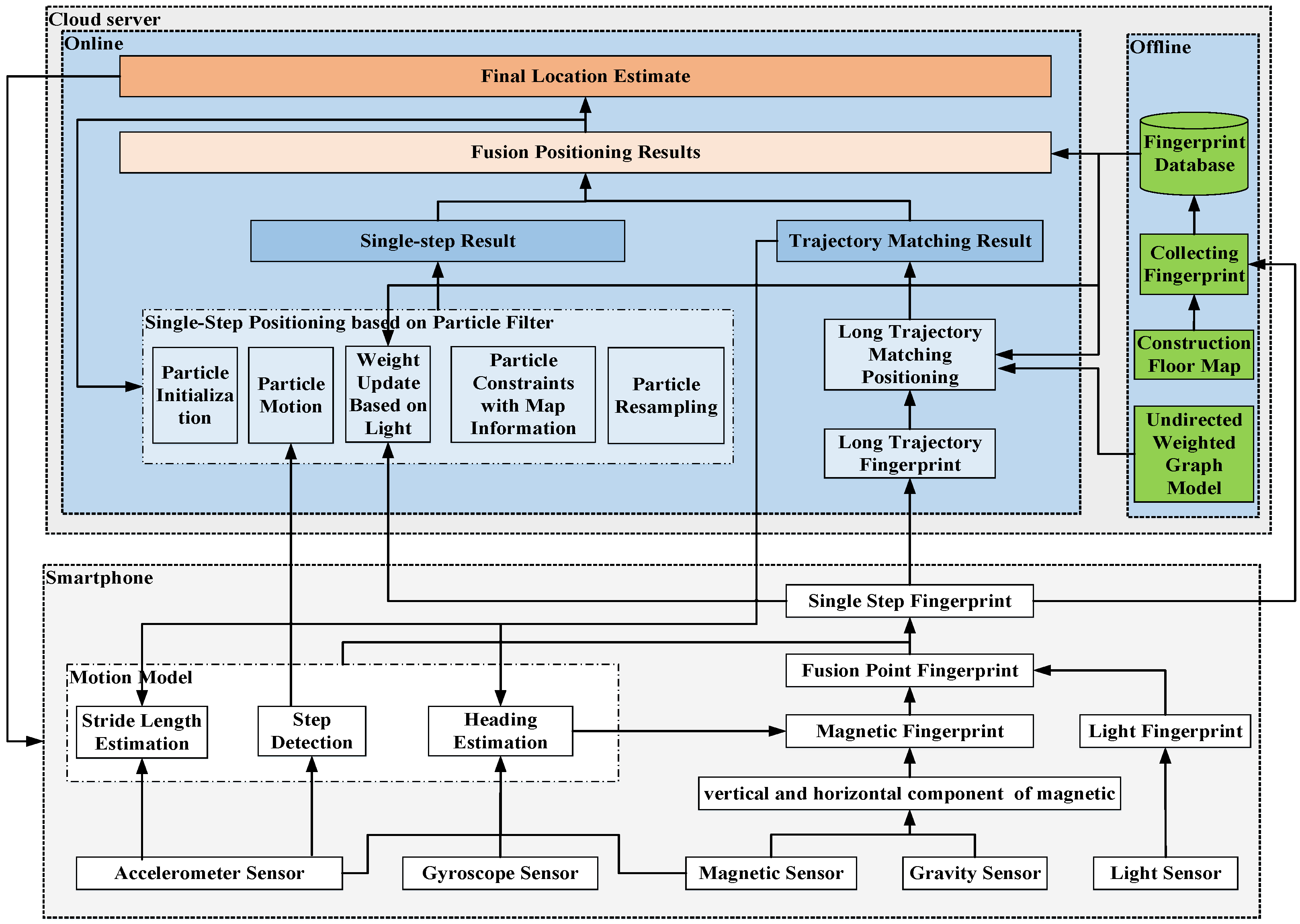
3.1. System Architecture
3.2. Pedestrian Motion Model
3.2.1. Precise Pedestrian Heading Estimation Based on Historical Information
3.2.2. Step Counting and Length Estimation
3.3 Hybrid Fingerprints Model
3.3.1 Single-Step Fingerprints
3.3.2 Long Trajectory Fingerprints
3.3.3. Fingerprint Matching
3.4. Single-Step Tracking Algorithm Based on Particle Filter Framework
3.4.1. Particle Initialization Based on Long Trajectory Matching
3.4.2. Motion Model
3.4.3. Particle Constraints Based on the Floor Plan
3.4.4. Weight Update Based on Single-Step Fingerprints
3.4.5. Particle Resampling
3.4.6. Pedestrian Position Decision Strategy
3.5. Long Trajectory Calibration Scheme Based on Undirected Weighted Graph Model
3.5.1. Undirected Weighted Graph Model
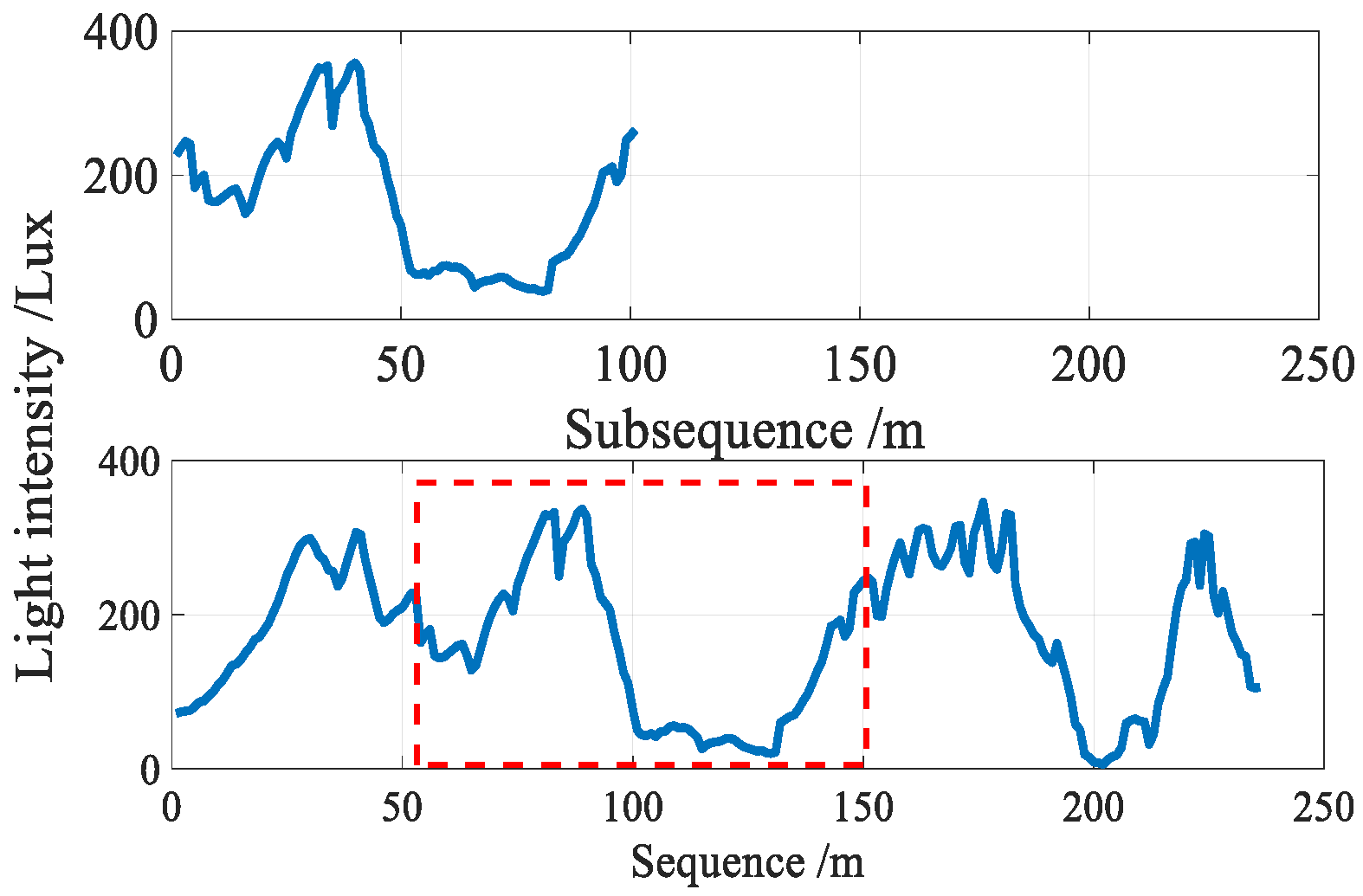
3.5.2. Subsequence Matching
3.5.3. Long Trajectory Calibration Scheme
| Algorithm 1. long trajectory calibration scheme | |
| 1: | Input: online trajectory t and training trajectory |
| 2: | Output: user position |
| 3: | Get the direction and length of online trajectory t |
| 4: | If the last step of t is turn then |
| 5: | Select similar trajectory according to and |
| 6: | For each training trajectory T do |
| 7: | Compute trajectory similarity degree between t and using DTW algorithm |
| 8: | Result validation |
| 9: | End for |
| 10: | If have perfect result then |
| 11: | Calibrate the result of single-step tracking algorithm |
| 12: | End if |
| 13: | End if |
| 14: | If the last step of t is not turn, then |
| 15: | Select similar trajectory according to |
| 16: | For each training trajectory T do |
| 17: | Compute trajectory similarity between t and using subsequence DTW algorithm |
| 18: | Result validation |
| 19: | End for |
| 20: | If have perfect match result then |
| 21: | Calibrate the result of single-step tracking algorithm |
| 22: | End if |
| 23: | End if |
| 24: | Return |
3.5.4. Result Validation of Long Trajectory Matching
- a)
- DTW distance. This quantity is calculated as the sum of the distances between the aligned samples normalized by the number of samples [8]. The normalized DTW distance between trajectory pairs of matched must be less than 5.
- b)
- Scale factor. For each trajectory pair of matched with samples. The scale factor is , which represents how DTW stretches or compresses a trajectory to aligns and find the most similar trajectory. The scale factor must be less than 3. We assume that the speed of human walking differs little (commonly less than 3 times).
- c)
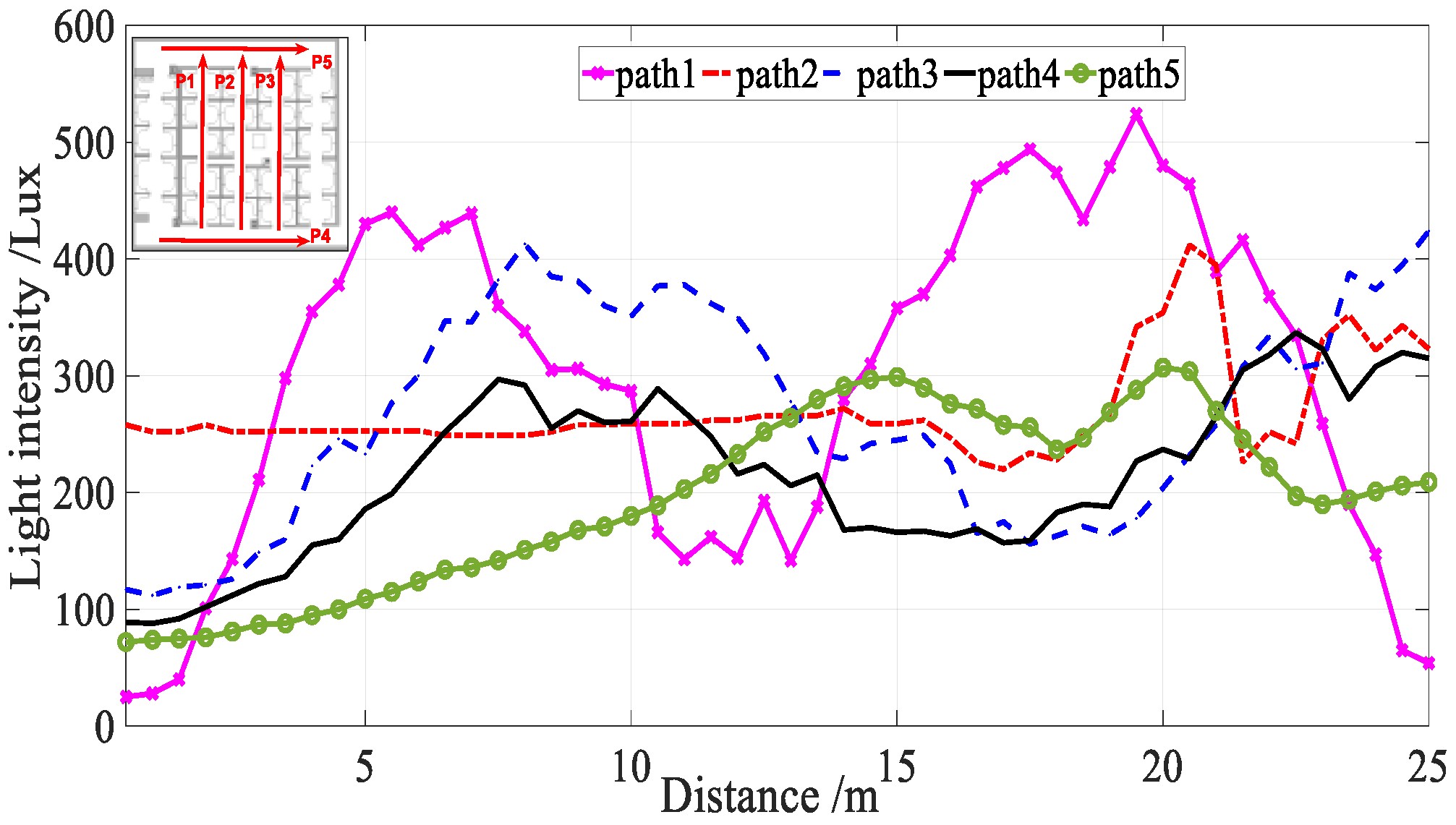
- Spatial topology. The shape and space distance of matched trajectory in the PDR trace should also match. For each trajectory pair of matched ta,tb, we obtained two spatial coordinate vectors (XA,YA) and (XB,YB) . After normalizing the coordinate of PDR trace pair to the origin of coordinates, the similarity of PDR trace is calculated by . denotes the number of the matched point pair after DTW stretching or compressing. The similarity of PDR trace must be less than an empirical threshold. As shown in Figure 17, five paths (P1,…,P5) correspond to five training trajectories (t1,…,t5) (in red). A pedestrian walks along p3, and obtains an online trajectory t (in blue). di denotes the DTW distance between t and ti. The sensor noise may cause, d1<d3<min({d2,d4,d5}) thus mistaking t1 as the most similar trajectory. However, the space distance between t1 and t0 is much larger than that between t3 and t0. The spatial topology constraint can be used to filter out the incorrect mapping trajectory t1 and find correct trajectory t3 by the shape and space distance constraint of the PDR trace. Therefore, spatial topology filtering is an effective way to avoid mismatching.
3.5.5. Adaptive Fusion of LTM Matching Results
3.5.6. Calibrating Heading and Step Length Based on the Undirected Weighted Graph Model
3.6. Other Considerations: Floor Identification
4. Experiments and Evaluation
4.1. Experimental Setup
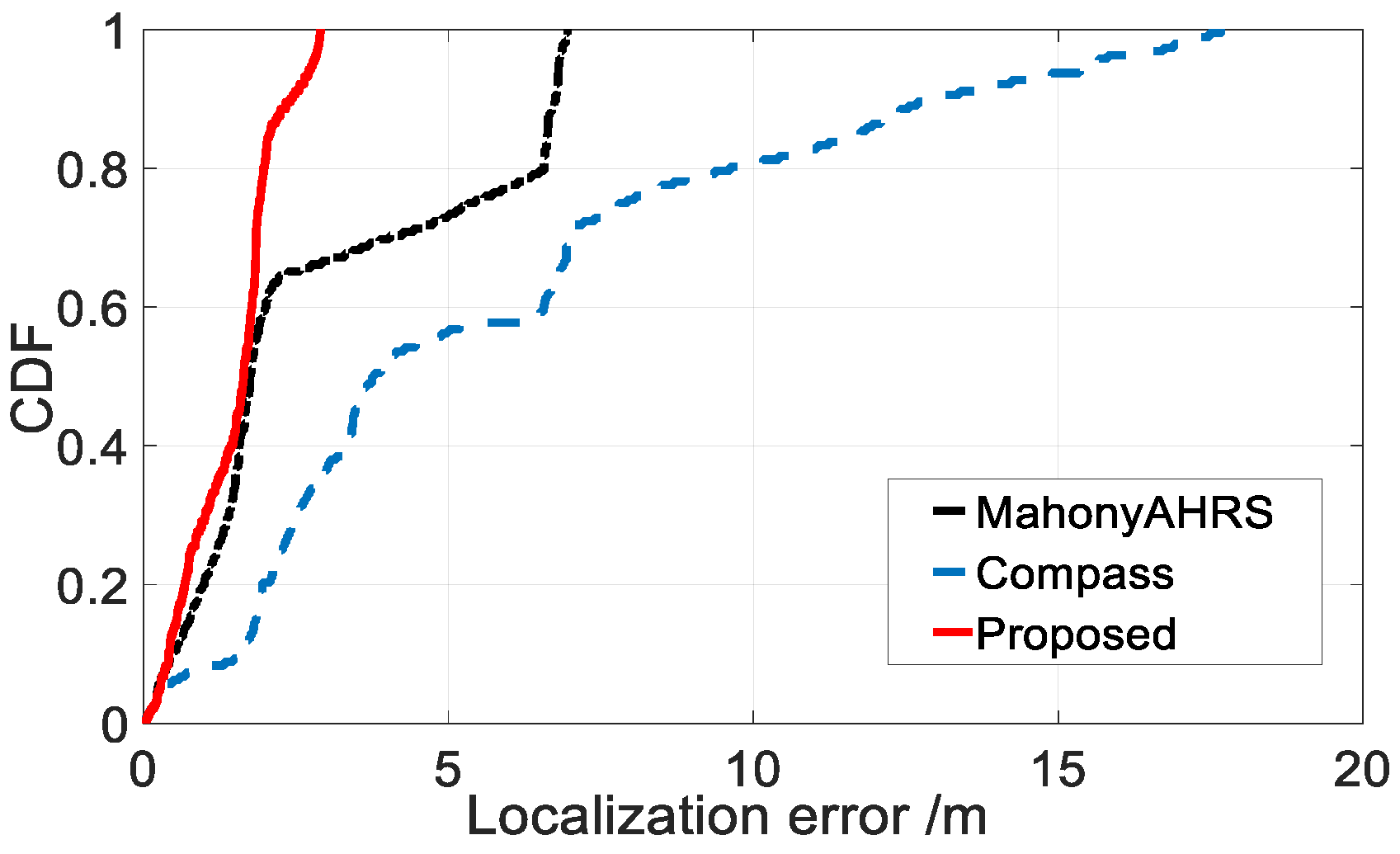
4.2. Localization Accuracy in Typical Scenarios
4.3. Localization Accuracy in Sunlight Interference Scenario
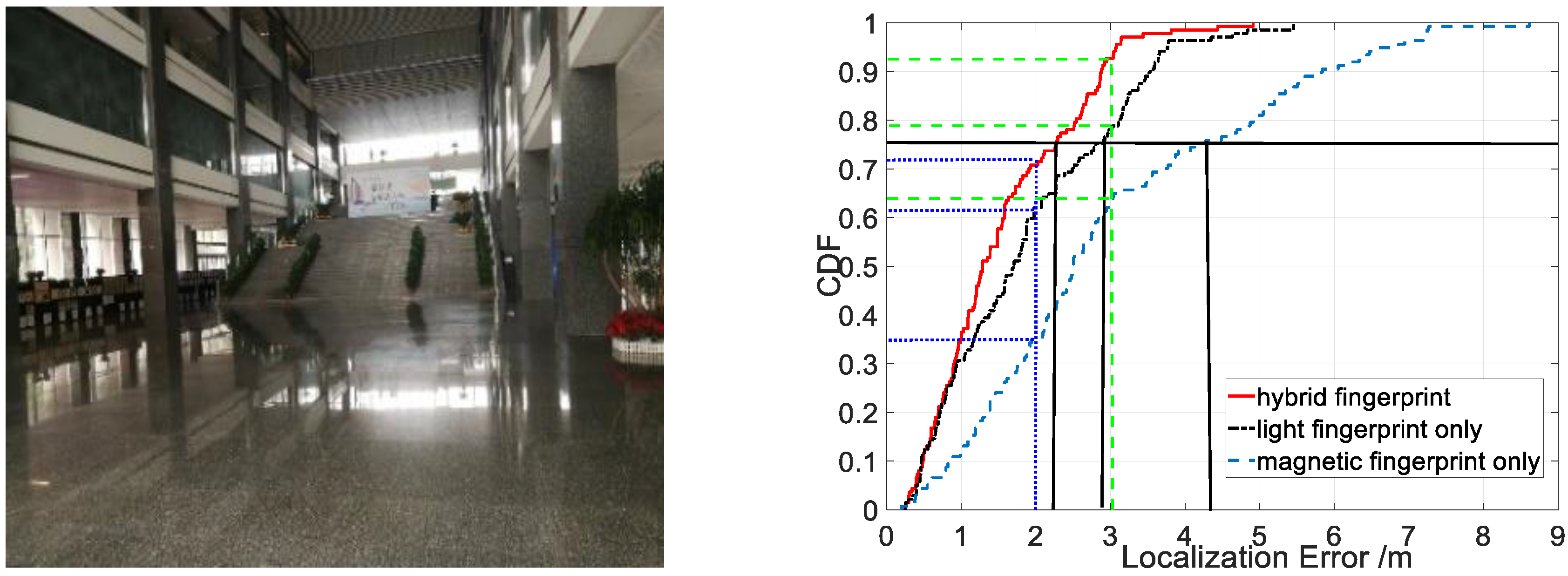
4.4. Localization Accuracy in Open-Plan Areas
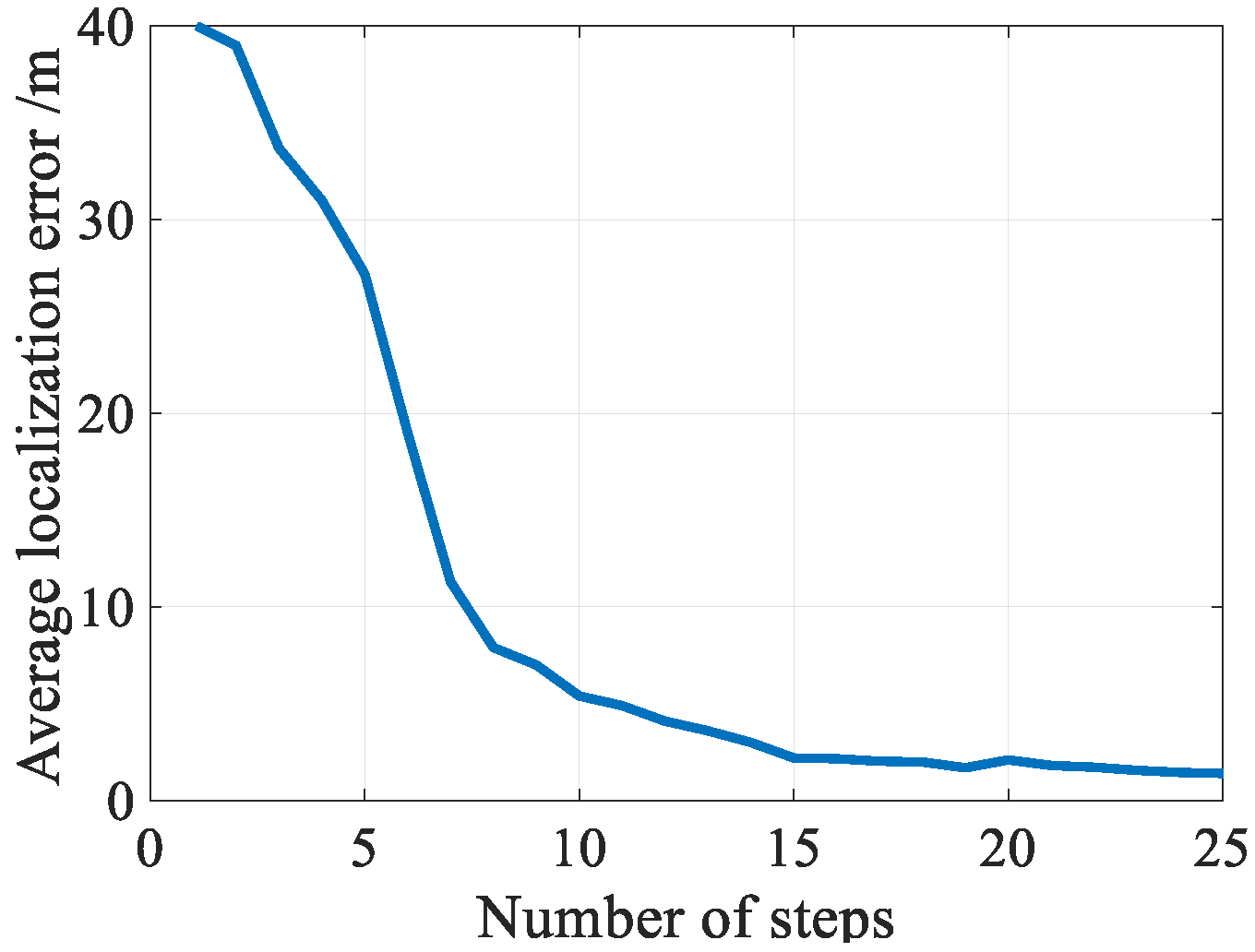
4.5. Localization Accuracy vs. Trajectory Length
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor Localization Using Pervasive Magnetic Field and Opportunistic WiFi Sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Indoor Location Market worth 40.99 Billion USD by 2022. Available online: https://www.marketsand markets.com/PressReleases/indoor-location.asp (accessed on 1 October 2018).
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Liu, H.-H.; Liu, C. Implementation of Wi-Fi Signal Sampling on an Android Smartphone for Indoor Positioning Systems. Sensors 2017, 18, 3. [Google Scholar] [CrossRef] [PubMed]
- Tiemann, J.; Pillmann, J.; Wietfeld, C. Ultra-Wideband Antenna-Induced Error Prediction Using Deep Learning on Channel Response Data. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Yohan, A.; Lo, N.-W.; Winata, D. An Indoor Positioning-Based Mobile Payment System Using Bluetooth Low Energy Technology. Sensors 2018, 18, 974. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Zhang, X.; Li, Q.; Fang, Z. A Visual-Based Approach for Indoor Radio Map Construction Using Smartphones. Sensors 2017, 17, 1790. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Feng, L.; Yang, A. Fusion Based on Visible Light Positioning and Inertial Navigation Using Extended Kalman Filters. Sensors 2017, 17, 1093. [Google Scholar] [CrossRef]
- Alonso-González, I.; Sánchez-Rodríguez, D.; Ley-Bosch, C.; Quintana-Suárez, M. Discrete Indoor Three-Dimensional Localization System Based on Neural Networks Using Visible Light Communication. Sensors 2018, 18, 1040. [Google Scholar] [CrossRef] [PubMed]
- Xie, B.; Gong, S.; Tan, G. LiPro: Light-based indoor positioning with rotating handheld devices. Wirel. Netw. 2018, 24, 49–59. [Google Scholar] [CrossRef]
- Kuo, Y.; Pannuto, P.; Hsiao, K.; Dutta, P.; Arbor, A. Luxapose: Indoor Positioning with Mobile Phones and Visible Light. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (Mobicom ’14), Maui, HI, USA, 7–11 September 2014; pp. 299–301. [Google Scholar] [CrossRef]
- Li, L.; Hu, P.; Peng, C.; Shen, G.; Zhao, F. Epsilon: A Visible Light Based Positioning System. In Proceedings of the 11th USENIX Conference on Networked Systems Design and Implementation, Seattle, WA, USA, 2–4 April 2014. [Google Scholar]
- Xu, Q.; Zheng, R.; Hranilovic, S. IDyLL: Indoor Localization using Inertial and Light Sensors on Smartphones. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp ’15), Osaka, Japan, 7–11 September 2015; pp. 307–318. [Google Scholar]
- Wang, Q.; Luo, H.; Men, A.; Zhao, F.; Gao, X.; Wei, J.; Zhang, Y.; Huang, Y. Light positioning: A high-accuracy visible light indoor positioning system based on attitude identification and propagation model. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718758263. [Google Scholar] [CrossRef]
- Hu, P.; Li, L.; Peng, C.; Shen, G.; Zhao, F. Pharos: Enable Physical Analytics Through Visible Light Based Indoor Localization. In Proceedings of the Twelfth ACM Workshop on Hot Topics in Networks (HotNets-XII), College Park, MD, USA, 21–22 November 2013; pp. 1–7. [Google Scholar]
- Huynh, P.; Yoo, M. VLC-Based Positioning System for an Indoor Environment Using an Image Sensor and an Accelerometer Sensor. Sensors 2016, 16, 783. [Google Scholar] [CrossRef] [PubMed]
- Energy Savings Forecast of Solid-State Lighting in General Illumination Applications. Available online: https://nlb.org/energy-savings-forecast-of-solid-state-lighting-in-general-illumination-applications/ (accessed on 1 October 2018).
- Jiménez, A.R.; Zampella, F.; Seco, F. Light-matching: A new signal of opportunity for pedestrian indoor navigation. In Proceedings of the 4th International Conference on Indoor Positioning and Indoor Navigation (IPIN 2013), Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Zhang, C.; Zhang, X. LiTell. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking (MobiCom ’16), New York, NY, USA, 3–7 October 2016; ACM Press: New York, NY, USA, 2016; pp. 230–242. [Google Scholar]
- Zhu, S.; Zhang, X. Enabling High-Precision Visible Light Localization in Today’s Buildings. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys ’17), Niagara Falls, NY, USA, 19–23 June 2017; pp. 96–108. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, J.; Zhao, X.; Peng, C.; Guo, Q.; Wu, B. NaviLight: Indoor localization and navigation under arbitrary lights. In Proceedings of the 36th IEEE International Conference on Computer Communications (INFOCOM 2017), Atlanta, GA, USA, 1–4 May 2017; pp. 1–9. [Google Scholar]
- Kim, D.-R.; Yang, S.-H.; Kim, H.-S.; Son, Y.-H.; Han, S.-K. Outdoor visible light communication for inter-vehicle communication using controller area network. In Proceedings of the 2012 4th International Conference on Communications and Electronics (ICCE 2012), Hue, Vietnam, 1–3 August 2012. [Google Scholar]
- Ilyas, M.; Cho, K.; Baeg, S.-H.; Park, S. Drift Reduction in Pedestrian Navigation System by Exploiting Motion Constraints and Magnetic Field. Sensors 2016, 16, 1455. [Google Scholar] [CrossRef] [PubMed]
- Shao, W.; Zhao, F.; Wang, C.; Luo, H.; Muhammad Zahid, T.; Wang, Q.; Li, D. Location Fingerprint Extraction for Magnetic Field Magnitude Based Indoor Positioning. J. Sens. 2016, 2016, 1945695. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lv, J. MaLoc: A Practical Magnetic Fingerprinting Approach to Indoor Localization using Smartphones Hongwei. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp ’14), Seattle, WA, USA, 13–17 September 2014; pp. 243–253. [Google Scholar]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A Reliability-Augmented Particle Filter for Magnetic Fingerprinting Based Indoor Localization on Smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Wang, Q.; Luo, H.; Zhao, F.; Shao, W. An indoor self-localization algorithm using the calibration of the online magnetic fingerprints and indoor landmarks. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Madrid, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Chung, J.; Donahoe, M.; Schmandt, C.; Kim, I.-J.; Razavai, P.; Wiseman, M. Indoor location sensing using geo-magnetism. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services (MobiSys ’11), Bethesda, MD, USA, 28 June–1 July 2011; ACM Press: New York, NY, USA, 2011; p. 141. [Google Scholar]
- Angermann, M.; Frassl, M.; Doniec, M.; Julian, B.J.; Robertson, P. Characterization of the indoor magnetic field for applications in Localization and Mapping. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2012), Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Storms, W.; Shockley, J.; Raquet, J. Magnetic field navigation in an indoor environment. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS 2010), Helsinki, Finland, 14–15 October 2010. [Google Scholar]
- Pasku, V.; De Angelis, A.; De Angelis, G.; Member, S.; Moschitta, A.; Carbone, P. Magnetic Field Analysis for 3-D Positioning Applications. IEEE Trans. Instrum. Meas. 2017, 66, 935–943. [Google Scholar] [CrossRef]
- Abdelnasser, H.; Mohamed, R.; Elgohary, A.; Alzantot, M.F.; Wang, H.; Sen, S.; Choudhury, R.R.; Youssef, M. SemanticSLAM: Using Environment Landmarks for Unsupervised Indoor Localization. IEEE Trans. Mob. Comput. 2016, 15, 1770–1782. [Google Scholar] [CrossRef]
- Gozick, B.; Subbu, K.P.; Dantu, R.; Maeshiro, T. Magnetic maps for indoor navigation. IEEE Trans. Instrum. Meas. 2011, 60, 3883–3891. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. LocateMe: Magnetic-fields-based indoor localization using smartphones. ACM Trans. Intell. Syst. Technol. 2013, 4, 73. [Google Scholar] [CrossRef]
- Zhang, C.; Subbu, K.P.; Luo, J.; Wu, J. GROPING: Geomagnetism and crowdsensing powered indoor navigation. IEEE Trans. Mob. Comput. 2015, 14, 387–400. [Google Scholar] [CrossRef]
- Luo, H.; Zhao, F.; Jiang, M.; Ma, H.; Zhang, Y. Constructing an Indoor Floor Plan Using Crowdsourcing Based on Magnetic Fingerprinting. Sensors 2017, 17, 2678. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Zhang, L.; Liu, Q.; Yin, Y.; Cheng, L.; Zimmermann, R. Fusion of Magnetic and Visual Sensors for Indoor Localization: Infrastructure-Free and More Effective. IEEE Trans. Multimed. 2017, 19, 874–888. [Google Scholar] [CrossRef]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N. Indoor tracking using undirected graphical models. IEEE Trans. Mob. Comput. 2015, 14, 2286–2301. [Google Scholar] [CrossRef]
- Rallapalli, S. Mobile Localization: Approach and Applications; The University of Texas at Austin: Austin, TX, USA, 2014. [Google Scholar]
- Bejuri, W.M.; Wan, Y.; Mohamad, M.M.; Sapri, M. Ubiquitous Positioning: A Taxonomy for Location Determination on Mobile Navigation System. Proc. IEEE 2011, 85, 265–298. [Google Scholar] [CrossRef]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2012), Sydney, Australia, 13–15 November 2012; Volume 15, pp. 1–9. [Google Scholar]
- Shu, Y.; Shin, K.G.; He, T.; Chen, J. Last-Mile Navigation Using Smartphones. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom ’14), Paris, France, 7–11 September 2015. [Google Scholar]
- Zhou, P.; Li, M.; Shen, G. Use it free. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; ACM Press: New York, NY, USA, 2014; pp. 605–616. [Google Scholar]
- Kang, W.; Nam, S.; Han, Y.; Lee, S. Improved heading estimation for smartphone-based indoor positioning systems. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Sydney, Australia, 9–12 September 2012; pp. 2449–2453. [Google Scholar] [CrossRef]
- Gu, F.; Khoshelham, K.; Shang, J.; Yu, F.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]
- Martinelli, A.; Gao, H.; Groves, P.D.; Morosi, S. Probabilistic Context-Aware Step Length Estimation for Pedestrian Dead Reckoning. IEEE Sens. J. 2018, 18, 1600–1611. [Google Scholar] [CrossRef]
- Zhao, F.; Luo, H.; Zhao, X.; Pang, Z.; Park, H. HYFI: Hybrid Floor Identification Based on Wireless Fingerprinting and Barometric Pressure. IEEE Trans. Ind. Inform. 2017, 13, 330–341. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Office | Parking | Shopping Mall | ||
|---|---|---|---|---|
| Lamp | Deployment | Regular | Irregular | Irregular |
| Type | CFL,LFL | ILB | CFL,LFL,LED | |
| Number | 362 | 120 | 660 | |
| Interval | 0.3–2 m | 4–8 m | 1–3 m | |
| Building | Area | 520 m2 | 640 m2 | 1800 m2 |
| Type | Concrete | Concrete | Concrete | |
| Sunlight | Lots of windows | No windows | Lots of windows and skylights | |
| Electronic instrument | Lots of computers | No | Little computers | |
| Iron shelf | Little shelves | No | Lots of shelves |
| Fingerprint Type | Mean Localization Error | Standard Deviation of Localization Error |
|---|---|---|
| Office | 1.29 m | 0.69 m |
| Shopping mall | 1.58 m | 0.79 m |
| Parking lot | 2.26 m | 1.32 m |
| Fingerprint Type | Mean Localization Error | Standard Deviation of Localization Error |
|---|---|---|
| Light fingerprints | 3.95 m | 2.39 m |
| Magnetic field fingerprints | 2.05 m | 1.22 m |
| Hybrid fingerprints | 1.83 m | 0.93 m |
| Fingerprint Type | Mean Localization Error | Standard Deviation of Localization Error |
|---|---|---|
| Light fingerprints | 1.88 m | 1.19 m |
| Magnetic field fingerprints | 2.99 m | 1.88 m |
| Hybrid fingerprints | 1.55 m | 0.94 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Luo, H.; Men, A.; Zhao, F.; Huang, Y. An Infrastructure-Free Indoor Localization Algorithm for Smartphones. Sensors 2018, 18, 3317. https://doi.org/10.3390/s18103317
Wang Q, Luo H, Men A, Zhao F, Huang Y. An Infrastructure-Free Indoor Localization Algorithm for Smartphones. Sensors. 2018; 18(10):3317. https://doi.org/10.3390/s18103317
Chicago/Turabian StyleWang, Qu, Haiyong Luo, Aidong Men, Fang Zhao, and Yan Huang. 2018. "An Infrastructure-Free Indoor Localization Algorithm for Smartphones" Sensors 18, no. 10: 3317. https://doi.org/10.3390/s18103317
APA StyleWang, Q., Luo, H., Men, A., Zhao, F., & Huang, Y. (2018). An Infrastructure-Free Indoor Localization Algorithm for Smartphones. Sensors, 18(10), 3317. https://doi.org/10.3390/s18103317