1. Introduction
Traffic simulation software is widely used in verifying and optimizing the traffic coordinating algorithms, due to its characteristics of repeatability, maneuverability, accuracy and low-cost. For the purpose of being aimed at different requirements, different traffic simulation software is developed. CORSIM, SimTraffic, AIMSUN, VISSIM, PARAMICS, etc., are mostly used in microscopic traffic simulation, while CORFLO, KRONOS, KWaves [
1], etc., are used in macroscopic traffic simulation and SPSS, STATISTICA [
2,
3] are mostly used in vehicle dynamical analyzing. To better simulate different traffic scenarios, most of the software supports application program interfaces (APIs) are for secondary developing, and researchers have obtained achievements based on traffic simulation software.
As the development of sensor and communication technology improves, connected and autonomous vehicles (CAVs), connected vehicles (CVs) and autonomous vehicles (AVs) [
4] are able to better serve traffic. Due to the advantages of simulation, many control strategies of CAVs have been conducted in simulation environment.
Gueriau [
5] proposed a simulation framework by introducing cooperative traffic models based on Multi-Agent theory into an open-source traffic simulator. The resulting simulation framework is robust and able to assess potential benefits of cooperative traffic control strategies in different traffic configurations. Zha [
6] proposed and evaluated a dilemma zone protection framework via vehicle to infrastructure communications, and examined the effectiveness of the proposed framework in a simulation test bed built in VISSIM. Fredette [
7] developed a simulated road network to resolve the disconnect between powertrain engineering and eco-driving by presenting the development of a simplified methodology for ensuring that eco-driving scenarios are contextualized against traditional drive-cycle based text techniques. Goodall [
8] proposed a novel technique to estimate the positions of unconnected vehicles based on the behaviors of communicating vehicles along a signalized arterial and simulated and verified the method microscopically using a commercial traffic simulation software package.
From the analysis above, we can conclude that models and control strategies verification can be grouped into three categories: the first category is API based verification in commercial traffic simulation software, such as Paramics and Vissim; the second category is redevelopment beyond open source traffic simulation software, such as MITSIMLab [
9] and SUMO [
10]; and the third category is to establish a new fundamental simulation environment.
The main difference between CAVs simulation and traditional traffic simulation is the controlling objects. In traditional traffic simulation, parameters of signal information, channelization, link properties, etc., are changed to enforce vehicles to change behaviors. In CAVs simulation, based on the V2X communication and status perception, control strategies should be generated to each individual vehicle to better simulate the autonomy of the vehicle. Due to the operation mechanism of the traffic simulation software, sometimes it is very complicated for researchers to implement customized models or control strategies within the API constraints, or models and algorithms we implement in the software are not able to operate as we anticipate. In this situation, fundamental simulation environment should be built to verify the models and the control strategies.
Control strategies of CAVs are usually generated based on status perception and communication. Radar [
11], LIDAR, camera, GPS, etc., are equipped on the vehicle or mounted on the infrastructure to perceive vehicle and environment status. The purpose of perceiving vehicle and environment status is to precisely judge the spatial and temporal relationship between two traffic objects, so the decision-making component can generate an optimal control strategy and better coordinate the traffic. The perceived status can be transmitted by several kinds of communication modes, like DSRC [
12], 4G, 3G, WIFI, etc. The performance of different communication modes have been deeply researched to help find appropriate communication mode applied in a certain traffic scenario [
13]. In CAVs based scenarios and applications simulation, the accuracy of the perceived status and the performance of the communication should be taken into account to enhance the reality of the simulation.
In this paper, the framework, models and implementation of CAVs kinematic simulation and verification are discussed. A four-layer framework for CAVs kinematic simulation is proposed. Properties of the intersections are defined to describe the road network. A target position based vehicle position updating method is designed to restrict the vehicles to move within the links, as well as to simulate the behaviors of lane changing and turning. Vehicle kinematic models are implemented to maintain the status of the vehicles. Priorities for individual vehicle control are authorized to different layers. Operating mechanisms of the CAVs uncertainties, which are defined as position error and communication delay, are implemented in the simulation. A simulation platform based on the proposed methodology is developed, and experiments are conducted to prove the reliability of the methodology.
2. Multi-Layer Simulation Framework
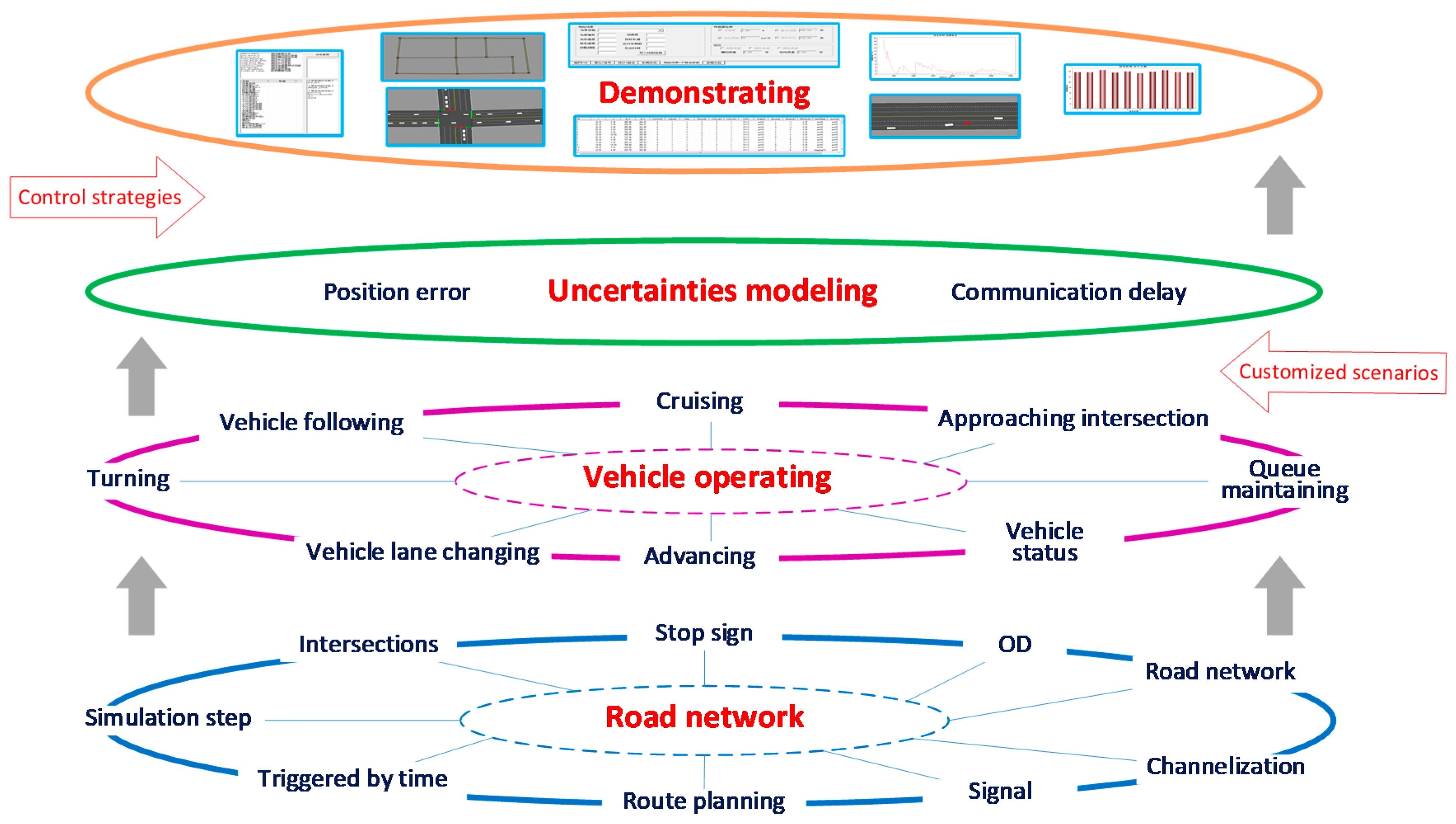
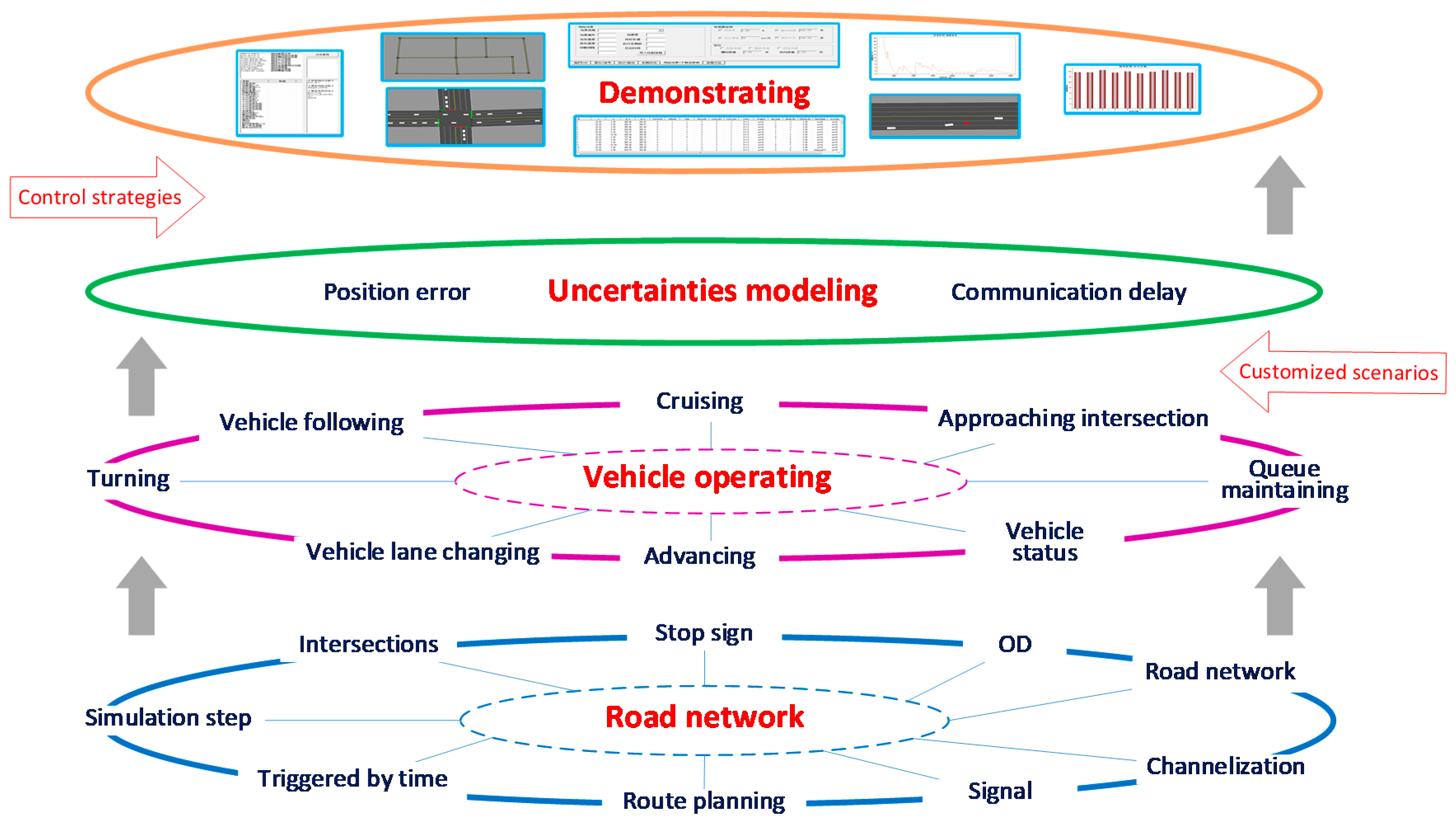
A multi-layer framework is introduced to accomplish the simulation. Four layers are designed: road network layer, vehicle operating layer, uncertainties modelling layer and demonstrating layer. Relationship of each layer is showed in
Figure 1.
The road network layer is to define the properties of the intersection and to describe the road network. Intersections are considered as the basic elements, links are generated based on the properties of each intersection. Signal control strategy and stop sign control strategy of intersections are deployed in road network layer. In vehicle operating layer, vehicles are generated from zone intersections, and move within the rules of vehicle following, lane changing, route selecting and other vehicle kinematic models. In CAVs, vehicle position error and communication delay always exist. Positioning error and communicating delay models are implemented in error modelling layer to enhance the reality of the simulation. The demonstrating layer is for visualization and evaluation.
Based on the CAVs kinematic simulation framework, one vehicle is able to move from its start zone to its destination zone along the pre-generated route. For CAVs applications, scenarios and control strategies would be implemented in the simulation, and several components would modify the status of the vehicles. Thus, priority of vehicle control is authorized to different layers to ensure the stability of the simulation. A hazardous over-speed scenario and pre-warning control strategy would be analyzed as an example to explain the vehicle control priorities. When one vehicle is generated in the road network, basic vehicle kinematic models, which are vehicle following model, lane changing model, route selecting model, turning model, etc., would generate vehicle status step by step to lead the vehicle moving to its destination intersection. When the scenario conditions are satisfied, the vehicle would be controlled by the scenario component. Meanwhile, the control strategy would monitor the status of the vehicle, and generate pre-warning suggestions to control the vehicle if necessary. After the pre-warning is relieved, the authority to control the vehicle would be given back to the vehicle kinematic models. Thus, control strategies, scenarios and basic vehicle kinematic models are authorized with the priority of high, medium and low respectively. Vehicle control component would realize its function by either changing the acceleration of the vehicle, or altering the vehicle trajectory.
When deploying CAV-based applications in reality, usually infrastructures should be built. As one of the most important components in CAV system, infrastructure apparently has a number of functions: transferring information, surveilling vehicle and environment status, making decisions, etc. For the functions of communicating and computing, there is no need to set up infrastructures in the simulation, because in the simulation, status of every individual unit can be obtained and computing would be executed automatically based on pre-designed algorithms. For the roadside sensors, which are aiming to surveil the vehicle and environment status, they can be simulated as scenario and control strategy. Surveillance radar would be analyzed as an example. Surveillance radars are usually distributed at high risk points, such as road-crossing, railroad crossing, and giving information to the vehicles about the presence of moving or still objects in a certain area. To simulate the function of surveillance radar, firstly, the operating mechanism of the radar should be modeled, and data type of the surveilling information should be designed based on the pre-existing simulation environment. Then a new programming object should be defined to maintain the information collected by the sensor in each simulation step. The programming object should include position of the moving or still object, length of detection capability, ID of vehicles within the detection range, etc. More attributes of the programming object can be designed based on different simulation goals. Then a control strategy, which is to process the information collected by the radar, should be designed and applied in the simulation. The output of the control strategy can be customized by the user. It can be either the speed suggestion to the vehicle, or lane suggestion to the vehicle. Lastly, we can evaluate the performance of the surveillance radar by analyzing the movement of the vehicles.
In this paper, properties of the vehicles and the intersections are defined in detail for vehicle control components to better control the vehicles, and a target position based vehicle position updating method is introduced to accomplish the change of vehicle trajectory.
3. Definition of the Properties of Intersections and Vehicles
3.1. Properties of the Intersection
Intersections are the basic elements composing the road network. Links can be described according to the properties of the intersections. In this paper, intersection properties are defined to describe a road network. The properties are defined in
Table 1.
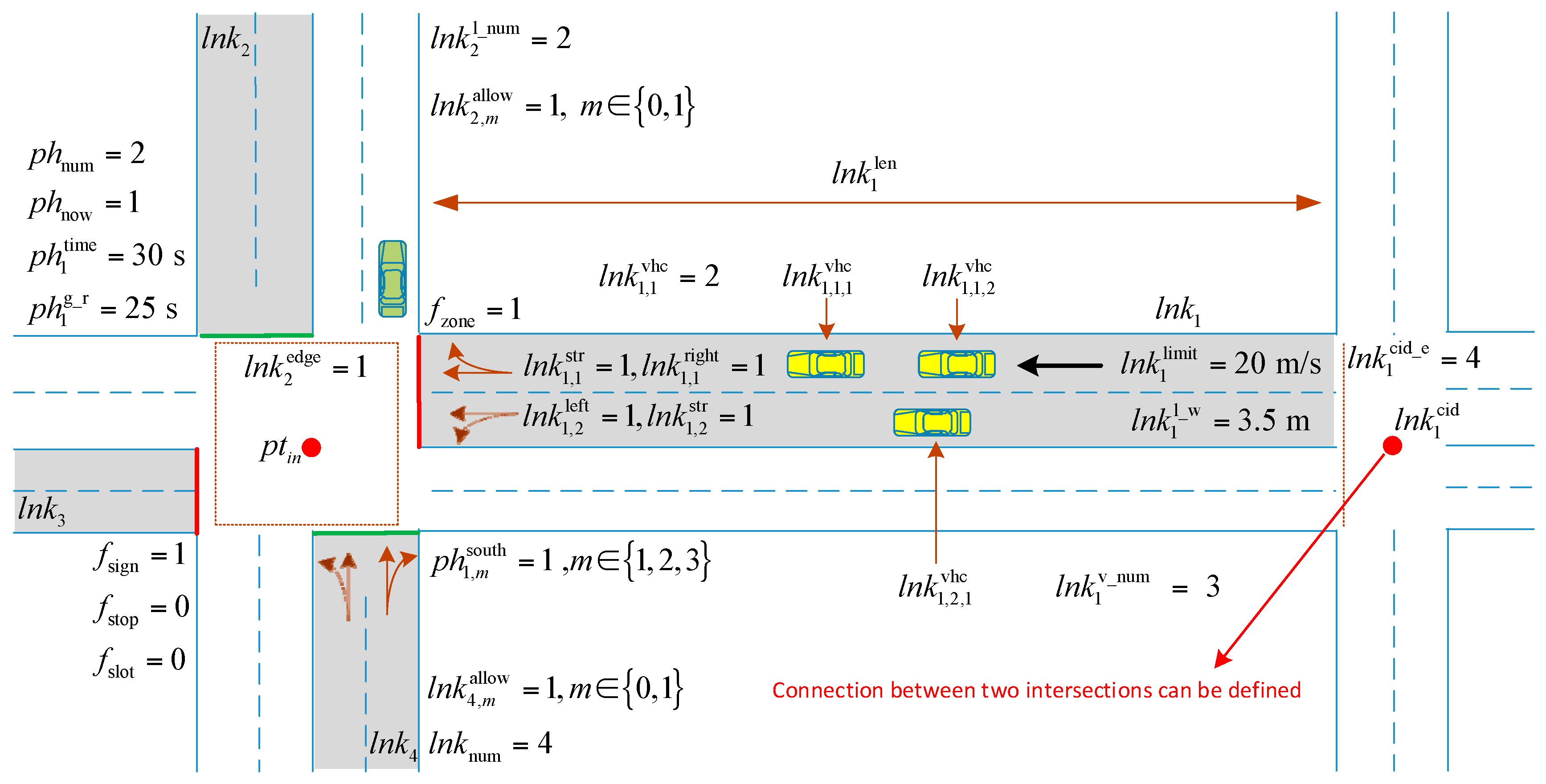
Each intersection would have corresponding properties and the properties are initialed before the simulation starts. After the simulation begins, the properties are updated in each simulation step. The column that is marked as fixed indicates that whether the value would change in each simulation step. The proposed method supports up to four directions of one intersection. The up edge of the intersection is figured as north, bottom edge figured as south, left edge figured as west, and right edge figured as east. In order to make the properties of intersections easier to understand, a road network with two intersections is introduced to explain the meanings of the properties in
Figure 2.
Paper uses properties of intersection to define the properties of link. When one intersection is being placed in the simulation environment, the relationship of the intersection and the pre-selected intersection would be established automatically (connecting link exists). The links would automatically be updated if the positions of the intersections are changed, and the connecting edge of the link to the intersection would be updated. When the simulation is began, each intersection would have a corresponding programming object to maintain the status of the intersection by updating the parameters of the object in each simulation step. In this way, we can built enough large road network and guarantee the simulation reliability.
3.2. Properties of the Vehicle
The properties of vehicle are designed as below in
Table 2.
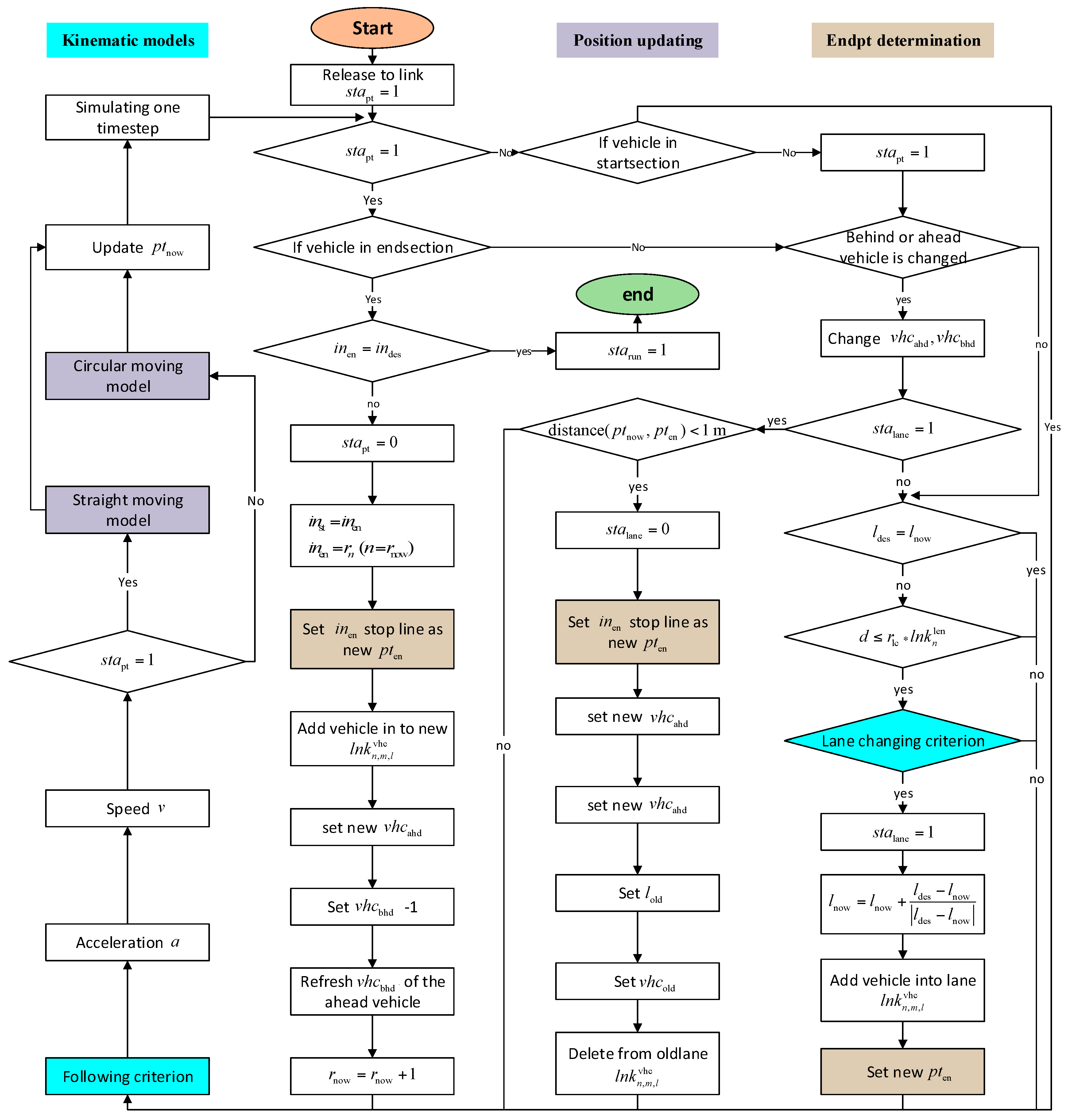
Same with the intersection properties, each vehicle would have corresponding properties. The properties would be initialed when the vehicle is released, and would be updated in each simulation step. The column that is marked as fixed indicates that whether the value would change in each simulation step. When one vehicle is released into the road network from zone intersections based on Origin Destination (OD) information, properties that contain route, lane, destination lane, initial speed, ahead vehicle, start intersection, end intersection, destination intersection, lane changing rate, etc., of the vehicle would be set to defaults. All the default values can be customized based on different requirements by the users. The route information is calculated based on a minimum route distance method [
14], and other route selecting methods apply. Then the vehicle would move in a straight way towards the target position. Vehicle queues of each lane would be maintained rigorously to apply the vehicle following model. When the vehicle is changing lane or entering the intersection, the target position would be changed to simulate different vehicle behaviors. For the vehicle that is entering the intersection, if the vehicle is turning, a circular moving model [
15] is implemented to update its position, else straight position updating method is applied. And if the intersection is the destination of the vehicle,
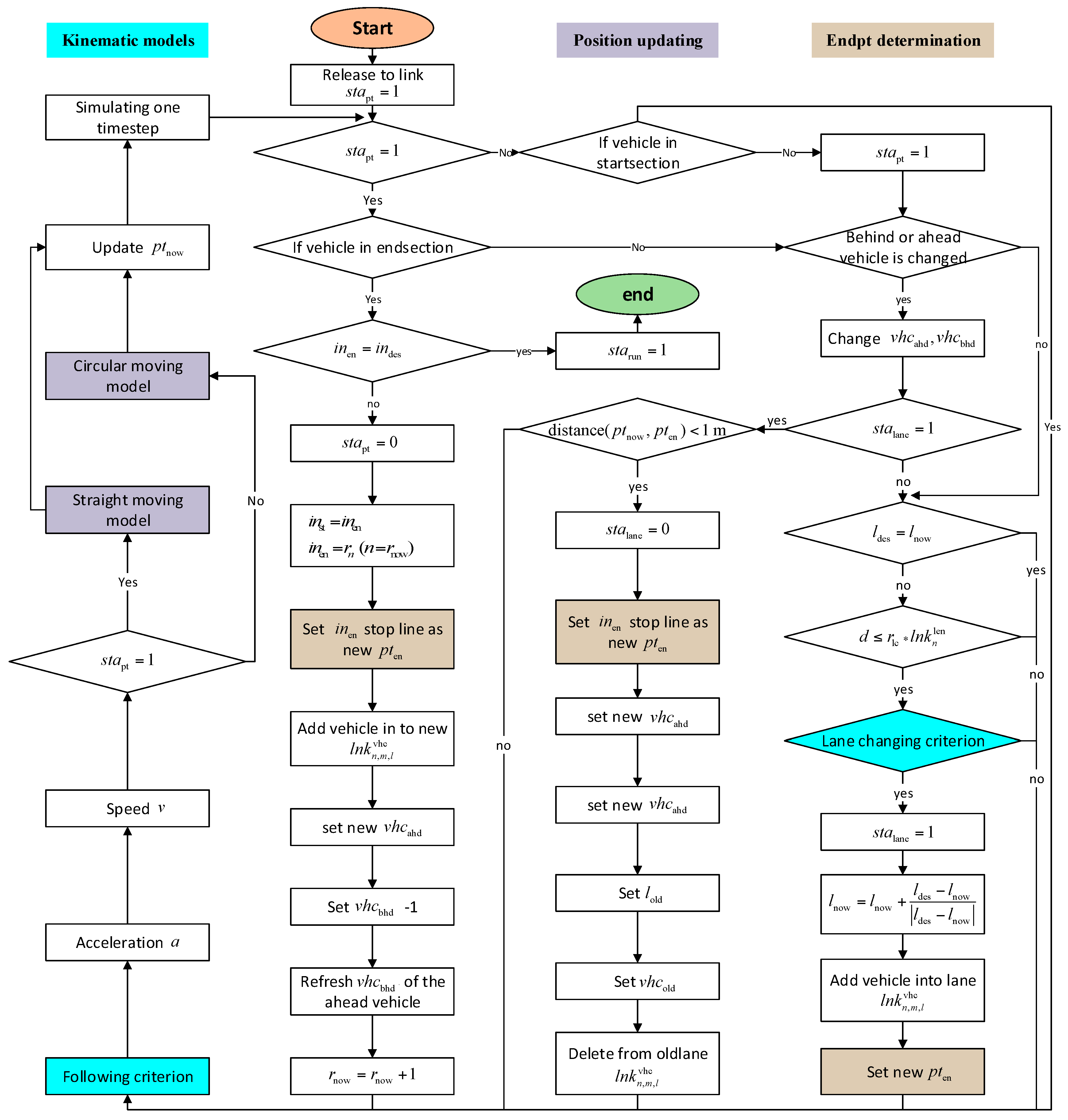
of the vehicle would be set to 1 and the vehicle would not be updated or displayed in the simulation. Acceleration and the target position are the main attributes that are leading the vehicle. Acceleration is determined by vehicle following and cruising models, and the target position is determined by vehicle trajectory. To better explain how the vehicles are controlled by each component,
Figure 3 is presented below to show the vehicle operation process from the time it is generated to the time it finishes its journey.
4. Maintaining of Vehicle Kinematic Status
4.1. Vehicle Speed Determination by Following and Cruising Models
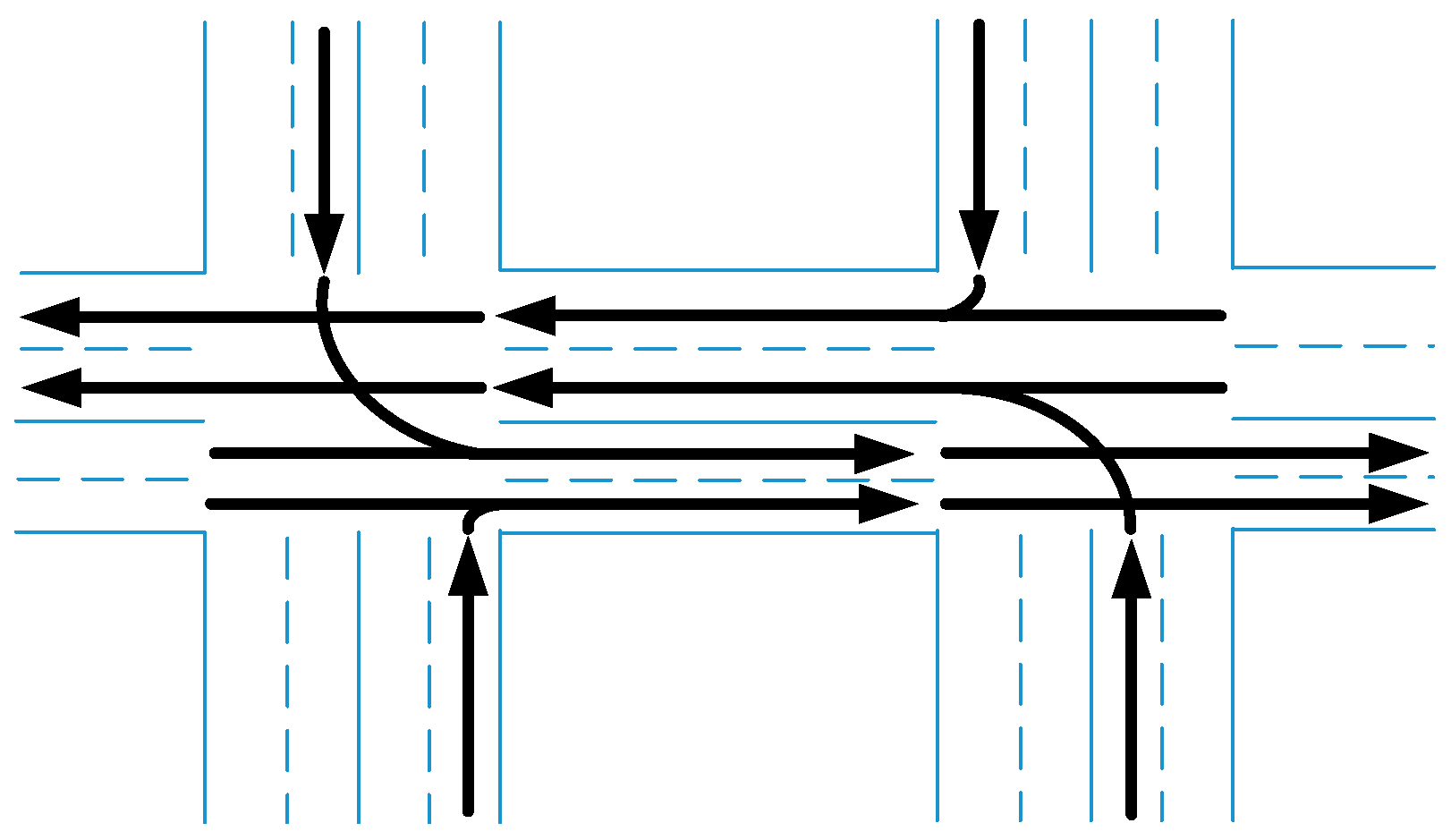
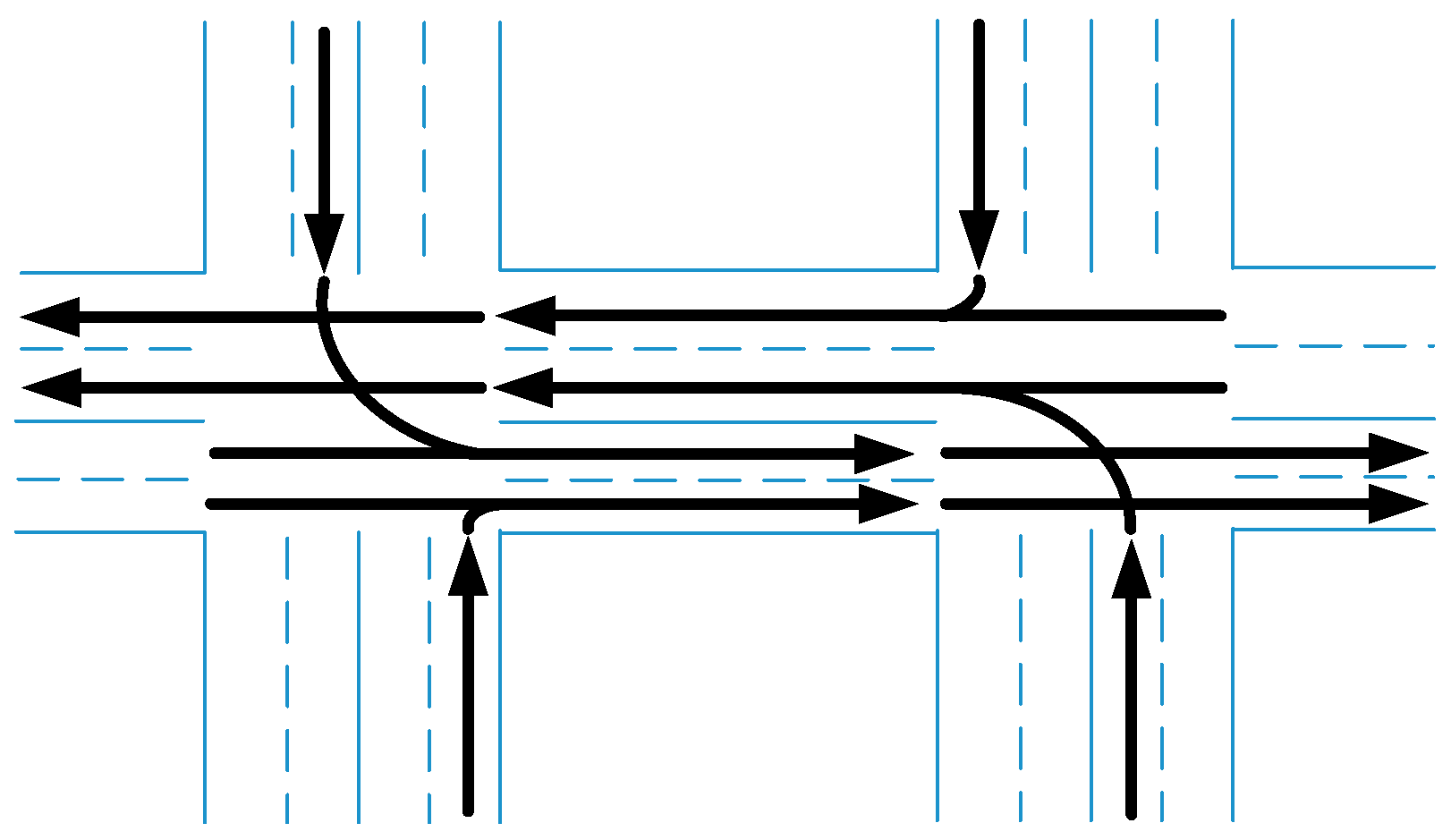
Movements of the following vehicle are significantly influenced by the leading vehicle. A segmented queue theory is applied to maintain the sequence of vehicles in each lane. The segmented queues are defined as below in
Figure 4.
As shown in the figure, queues are defined based on the lanes. When one vehicle crosses the stop line of the intersection or change to another lane, the vehicle is involved into another queue and would be deleted from the previous queue. In some intersections, due to the channelization of the intersection, right turning vehicles and straight going vehicles may merge into the same queue. In this situation, the intersection control strategy would decide which to be the leading vehicle and which to be the following vehicle as the vehicles are prioritized to enter the intersection. The queue information is saved in
and updated as the simulation proceeds. Minimum safe distance vehicle following model [
16] and constant speed cruising model are applied to determine the acceleration and speed of the vehicles. The vehicle following model can be described as below.
where
denotes the leading vehicle speed,
denotes the following vehicle speed,
is the maximum deceleration [
17],
is the gap between the two vehicles,
is the minimum safe distance between two vehicles with value of 5 m. Vehicle speed can be updated as below:
denotes the vehicle speed in time step
n, and
denotes the vehicle speed in time step
n + 1,
denotes the link speed limit,
is the interval of time step, usually the range of
is from 10 ms to 1 s [
18]. When one vehicle is approaching the intersection stop line, the vehicle should stop if the wayleave of the lane is not authorized. The wayleave of the lane is determined by the attributes of signal and channelization.
4.2. Vehicle Position Updating Method
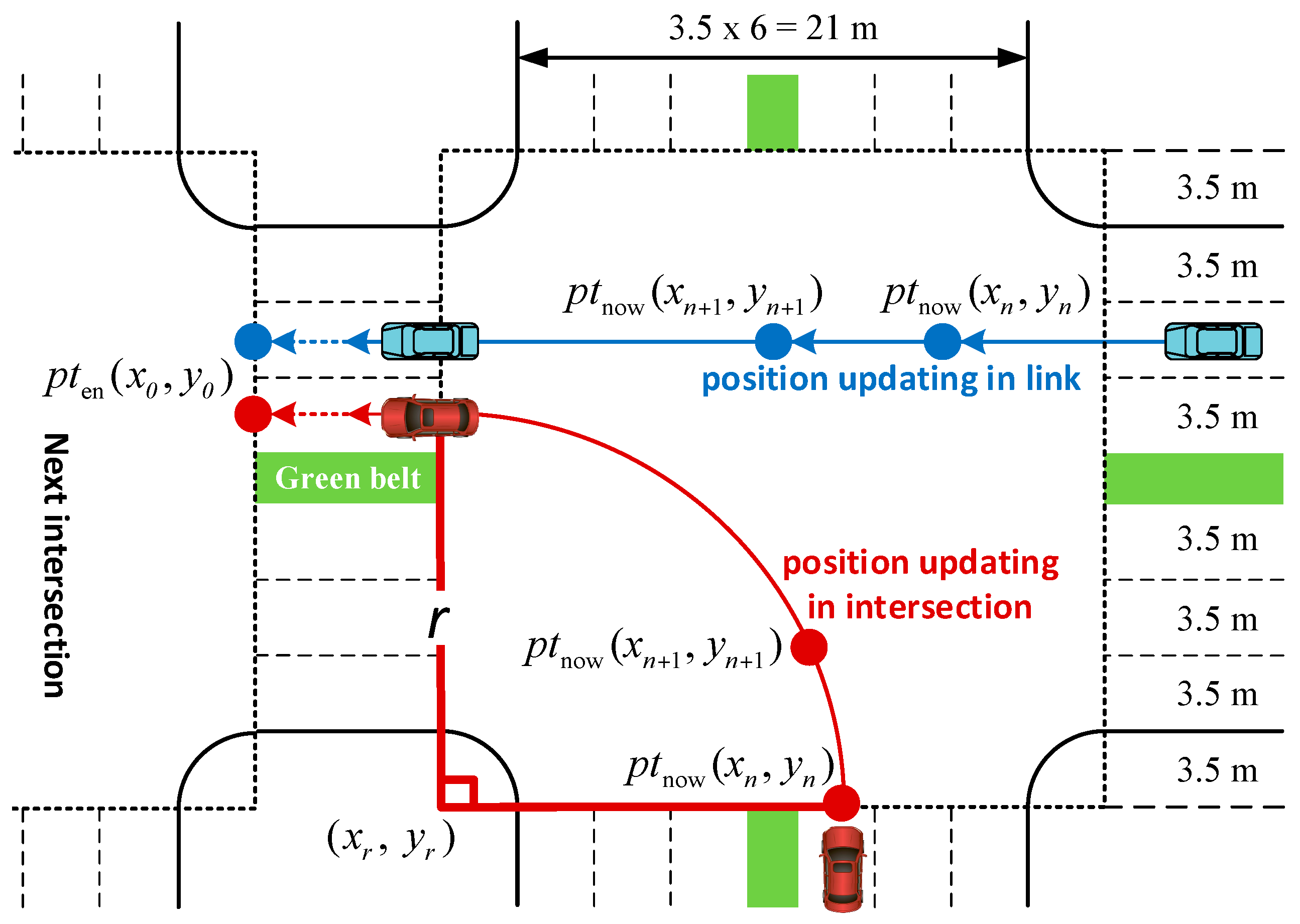
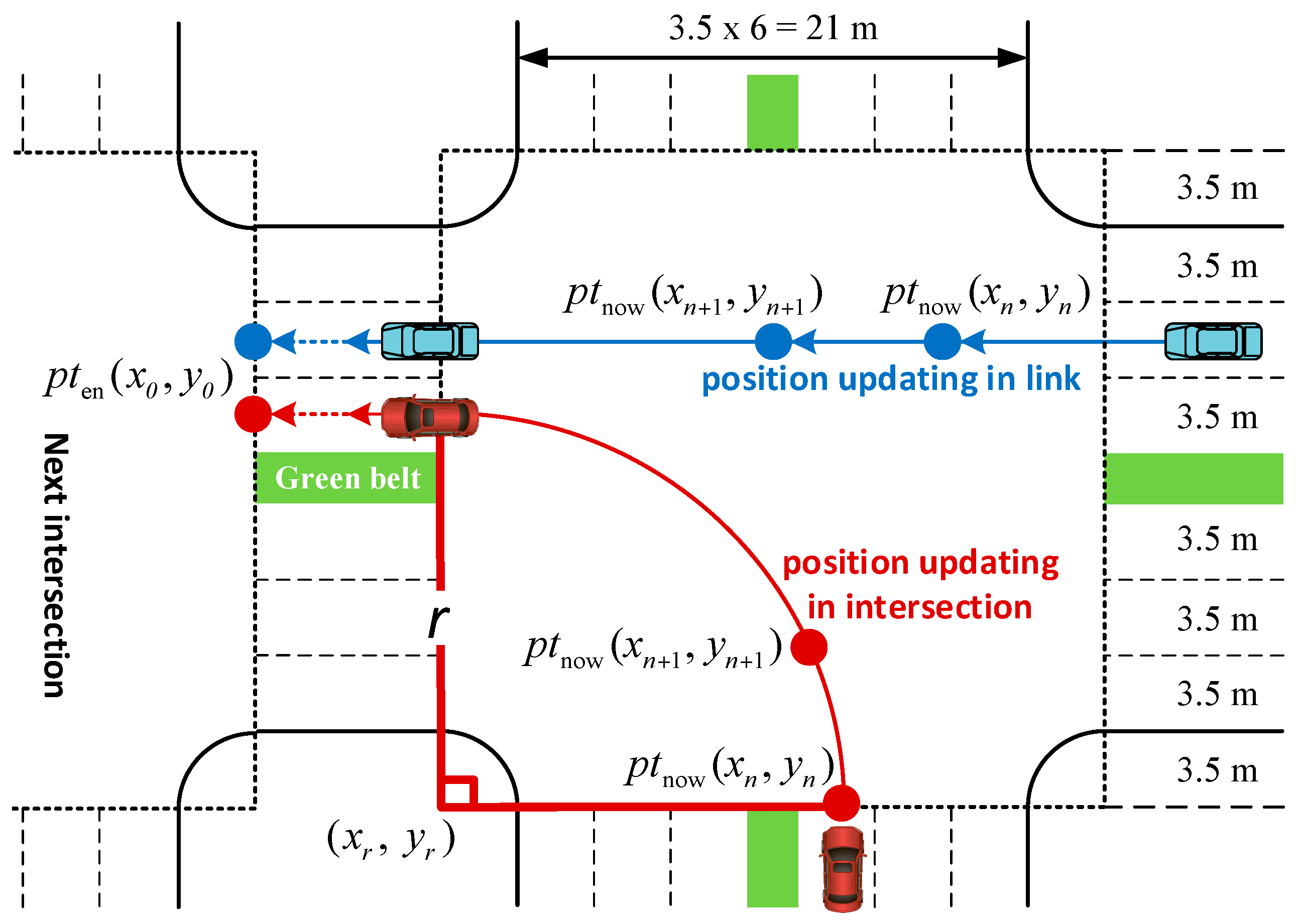
Figure 5 shows the vehicle position updating processes of straight going and turning.
denotes the position of the vehicle at simulation step
,
denotes the
at simulation step
,
denotes the position of the vehicle at simulation step
,
denotes the vehicle turning radius which can be calculated with the properties of the intersection,
denotes the center of the turning circle,
is calculated within the criteria of vehicle kinematic models and trajectories. For turning vehicles,
can be calculated by the formula below.
For the straight going vehicles,
can be calculated by the formula below.
As showed in formula, updating of the position of the turning vehicle does not rely on but based on the properties of the intersection instead. However, straight going vehicle position updating should relate to . A target position maintaining method is proposed to lead the vehicle to move along its trajectory.
4.3. Target Position Updating
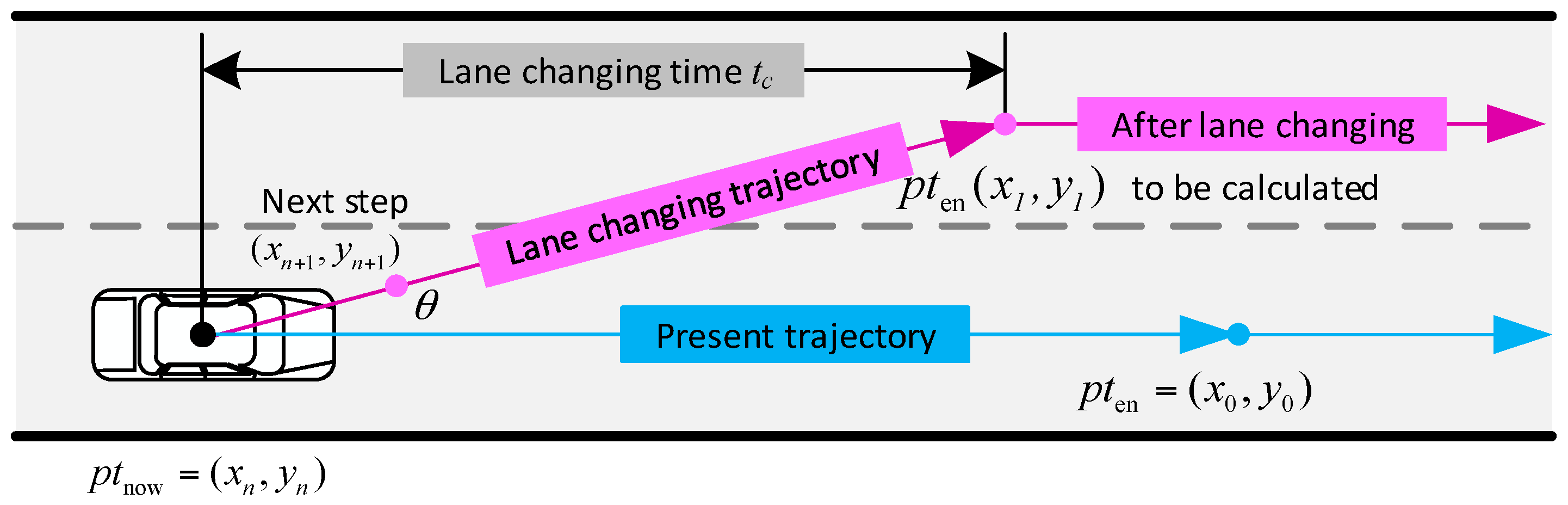
There are two situations that the target position of the vehicle should be modified. One is when the vehicle is changing lane, and other is when the vehicle is entering the intersection. The inequation below shows a minimum safety distance based vehicle lane changing model criterion implemented in the platform.
where
is the longitudinal gap between the lane changing vehicle and its behind vehicle in the target lane,
is the longitudinal distance the behind vehicle has moved during the lane changing duration
,
is the longitudinal distance the lane changing vehicle has moved during the lane changing duration
. In this paper,
is set to 3s [
19].
is the length of the vehicle,
is the width of the vehicle,
denotes the angle between the lane and the direction that the lane changing vehicle moves to. When the attribute
and the minimum safety distance based lane changing criterion are satisfied, vehicle starts to change lane, the target position can be calculated in
Figure 6.
By solving the equations below, the target position can be obtained.
When one vehicle finishes lane changing movement, or enters the intersection, the new target position would be set to the middle of stop line of the present lane. Except for the lane changing triggering condition, the target position should be updated when the distance between the vehicle and the target position is smaller than 1 m.
5. Uncertainties Operating Mechanisms
Qualities of communication and positioning would significantly influence the effectiveness of applied algorithms and control strategies. Position error and communication delay models and operating mechanisms are analyzed in this paper.
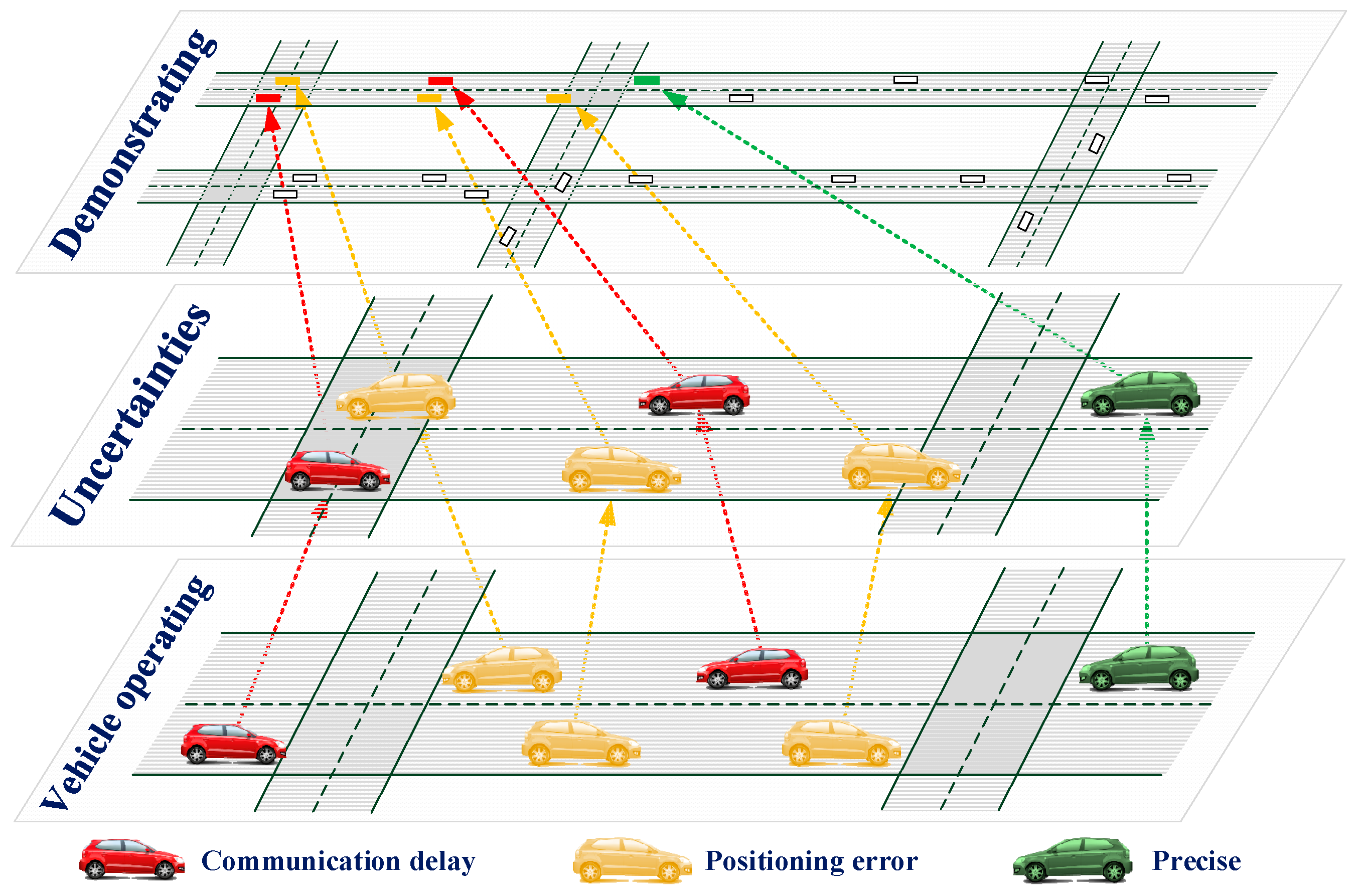
Figure 7 shows the observing position of the vehicle that is influenced by the uncertainties in vehicle operating layer, uncertainties modelling layer and the demonstrating layer.
As shown in the figure, in the vehicle operating layer, the vehicles are moving according to the vehicle kinematic models. In the uncertainties modelling layer, the observed positions of the vehicles are changed due to the overlapped position error and the communication delay. The demonstrating layer is for displaying and the display of the vehicles and the road network can be scaled and translated. Lateral position error mainly effects the lane identification of the vehicle. Now this problem can be well resolved by real-time video processing technology with accuracy of 97% [
20]. In this case, only longitudinal position error is discussed. Communication delay would influence the punctuality of information transmitting. Frequent information interacting would significantly influence the performance of the system. A CAV system contains variety of communication interacting types: interaction within one single device, transmission between two different equipment, multi-hop transmission among several components. Different communication protocols would lead to different communication delays. In this paper, single-hop transmission is discussed as an example for modelling the communication delay. Other communication delay models can be applied by replace the proposed model in this paper. Longitudinal position error and communication delay would affect the observing distance between two vehicles. In this case, it may lead to false pre-warning or pre-warning failure if no filtering algorithms are taken.
5.1. Gaussian Distribution Based Position Error Model
It is difficult to establish an accurate error model for the position error; nowadays, most existing methods are based on Gaussian distribution. Lee [
21] defined Gaussian distribution-based trajectory models to design the threshold parameters for a rear-end collision avoidance system. Although some researchers use other methods to model the GPS positioning error as a practical alternative [
22], we still propose the mostly adopted bounding method (Gaussian distribution function) to represent the distribution of position error
.
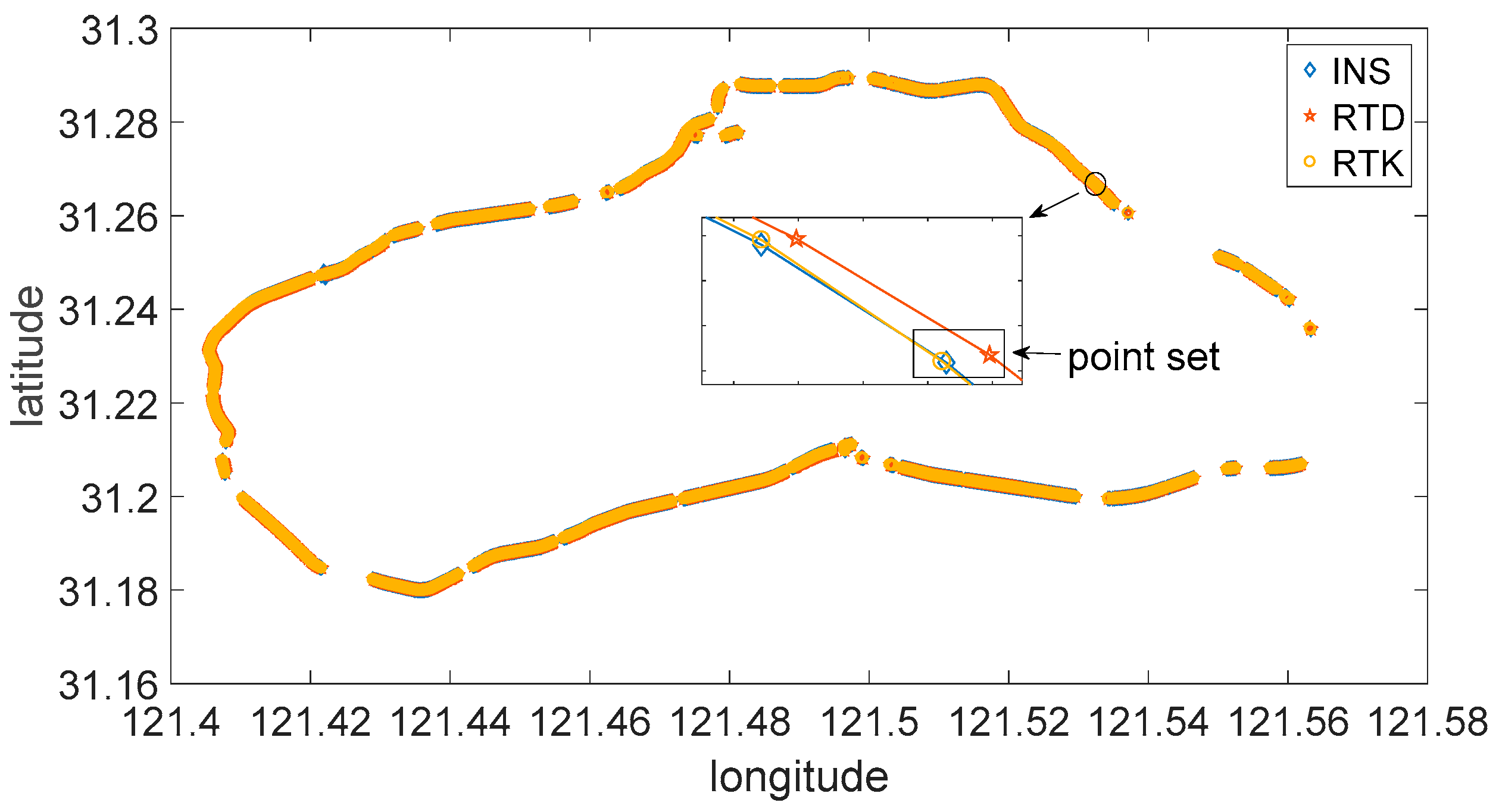
To determine the value of
and
in the above equation, an experiment has been conducted in Shanghai, China. A car equipped with three kinds of positioning systems are driven on the express way to generate positioning data. The three kinds of positioning systems are: INS (Inertial Navigation System) with RTK (Real Time Kinematic) positioning (this system is considered as the most precise system in the experiment, the other two systems are compared with this one), RTK positioning system and RTD (Real Time Differential) positioning system. The trajectory of the experiment is showed in
Figure 8 and
Figure 9.
Positioning data is collected once per second in each positioning system. Invalid point sets (at a certain time, one or more positioning systems did not generate valid position data) are deleted (the discontinuity of the trajectory is because of this) from the data sheet. Total number of the valid point sets is 4728. Position error is defined as the distance between INS position and RTK/RTD position. So we can get the position error matrix
and
.
denotes the error of RTK positioning system, and
denotes the of RTD positioning system.
and
are both 1 × 4728 matrix. With the definition of
and
, we can see that all the values in
and
are positive. Considering that the mean value of positioning error should approximates to 0 and the symmetry of position error, we establish new position error matrix
and
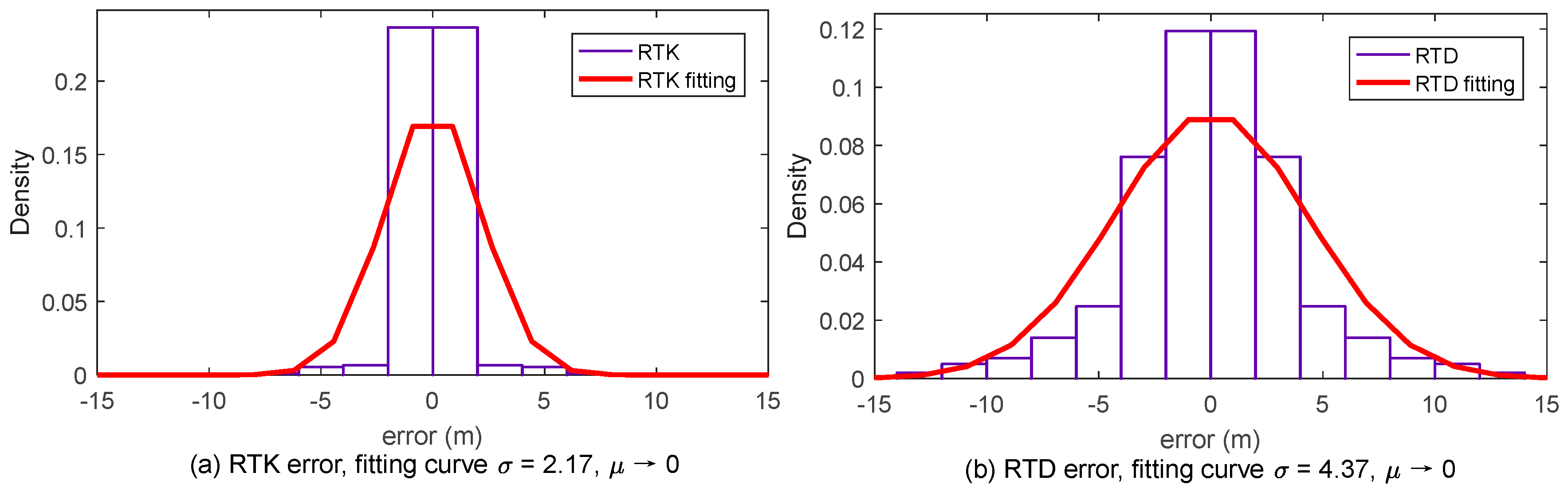
for analyzing. The densities of RTK and RTD position error are showed in
Figure 10.
The position error distribution is subject to Gaussian distribution. RTK positioning system is more precise than RTD positioning system, so
is smaller in RTK position error density fitting curve. In fact,
differs in different positioning systems and different environments. Dion [
23] has established a position error model with
equals to 2.8. In this paper, we use the RTD error model. Position error complying with the distribution above is superposed on each vehicle.
5.2. Uniform and Rayleigh Distribution-Based Communication Delay Model
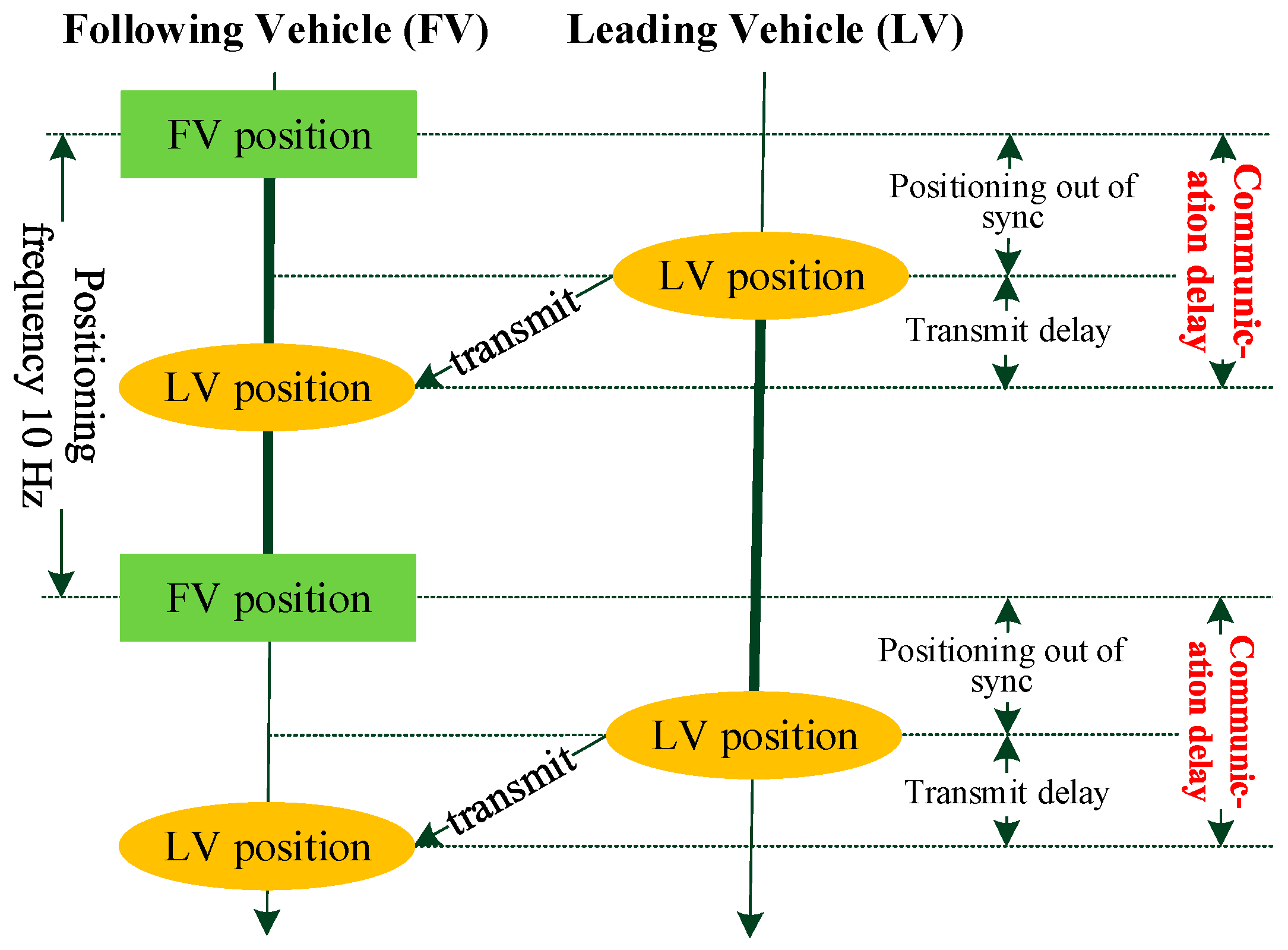
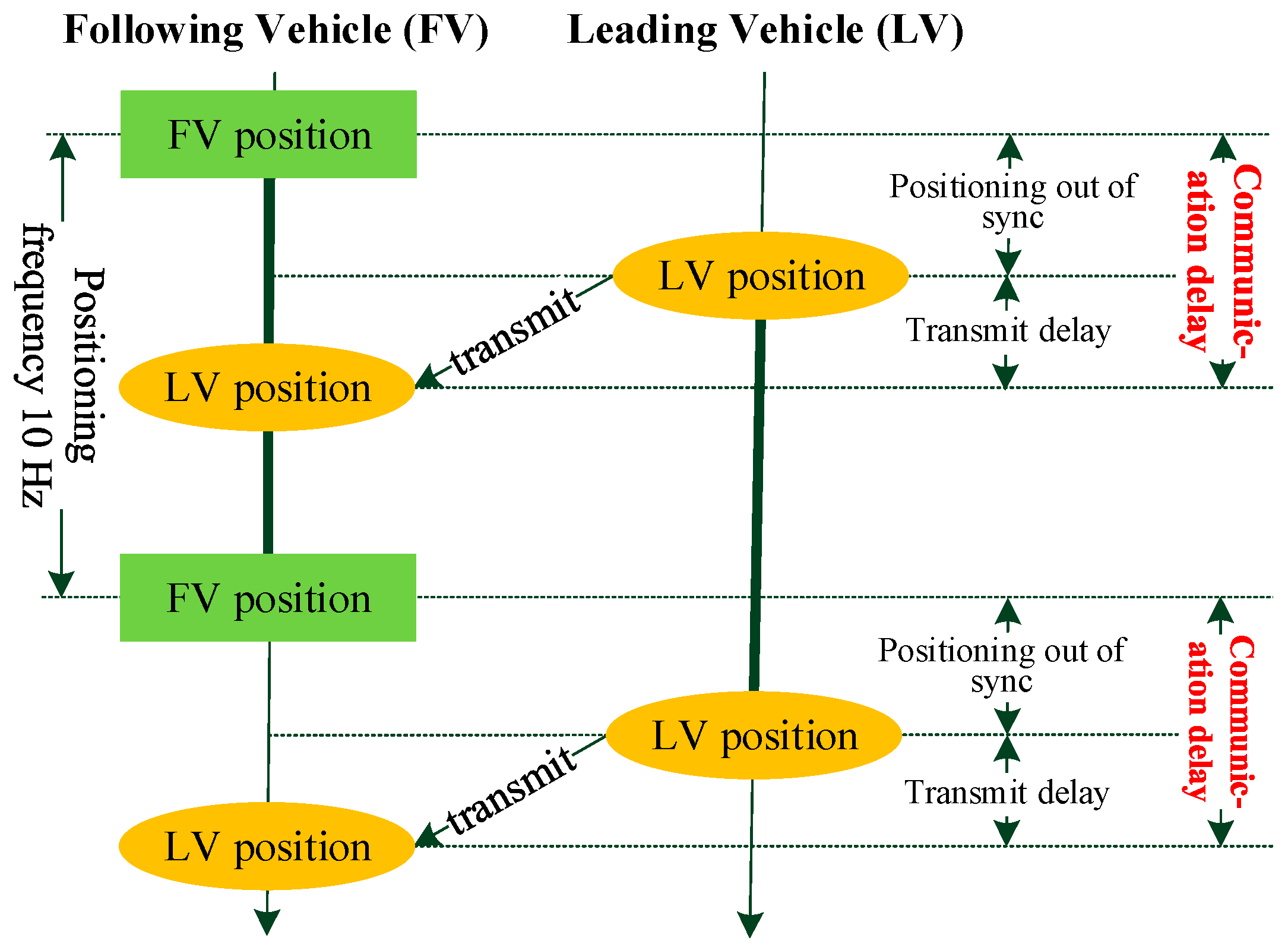
Due to different system structures and information retransmission mechanisms, communication delay is difficult to evaluate. For V2V communication, DSRC is widely used. In this paper, DSRC-based single-hop V2V communication delay is discussed. The communication delay generating process can be described in
Figure 11.
Generally, positioning devices output vehicle position data 10 times per second. The positioning time of the following vehicle and the leading vehicle cannot be accurately synchronized. This kind of asynchronization leads to communication delay, and the information transmission also results in communication delay. For the part of communication delay
caused by the asynchronization of positioning time, uniform distribution is applied to describe it. The distribution function can be defined as below.
The transmission delay model is established based on the data in paper [
23]. After analyzing the data in fiducial probability of 0.5, we found that the data is subject to Rayleigh distribution with mean value equals to 29.98 ms. Probability density function of Rayleigh distribution is defined as below.
And due to the characters of Rayleigh distribution, the mean value is defined as below.
Then we can get of value of
. With Equation (9), we can get the transmission delay model as below.
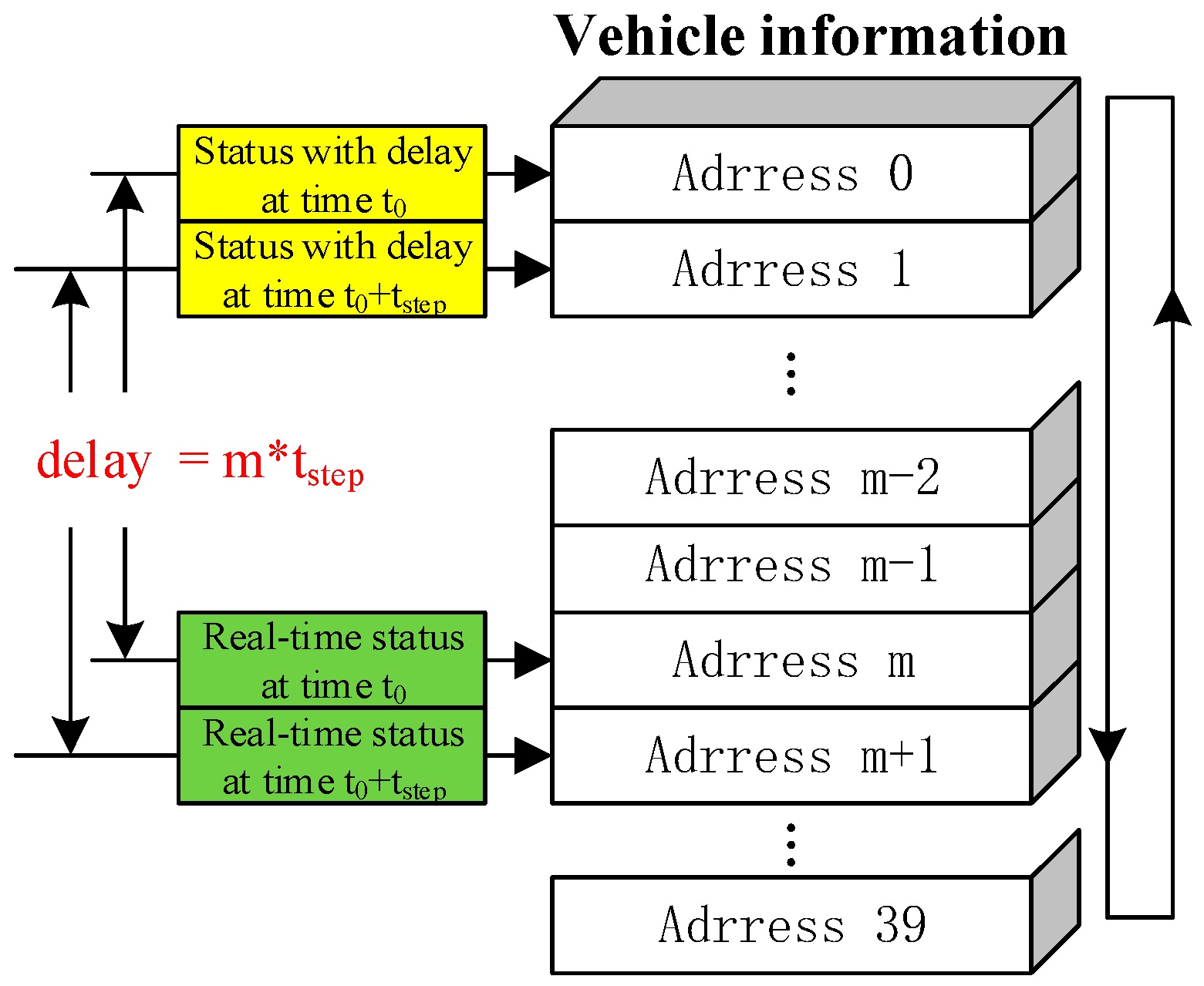
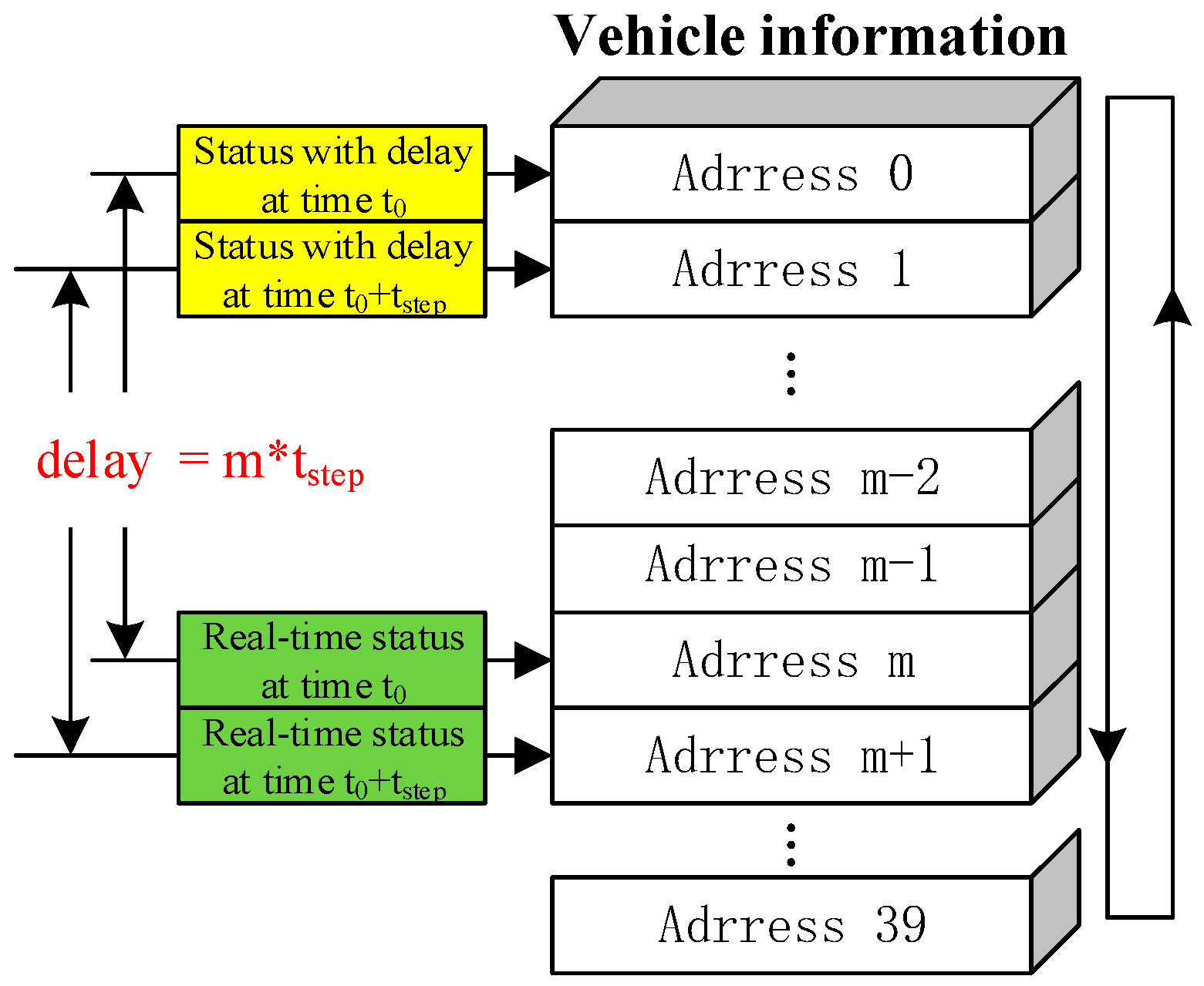
The communication delay is the sum of asynchronization delay and transmission delay. To implement the communication delay model in simulation, an array with 40 rows has been defined in computer memory. The communication delay simulating process is showed in
Figure 12.
Vehicle information would be saved in the array step by step. An index is used to determine which item should be used to be displayed or to be applied in the applications. For other communication modes, the communication delay models are able to be applied in the simulation within the proposed framework.
6. Simulation and Verification
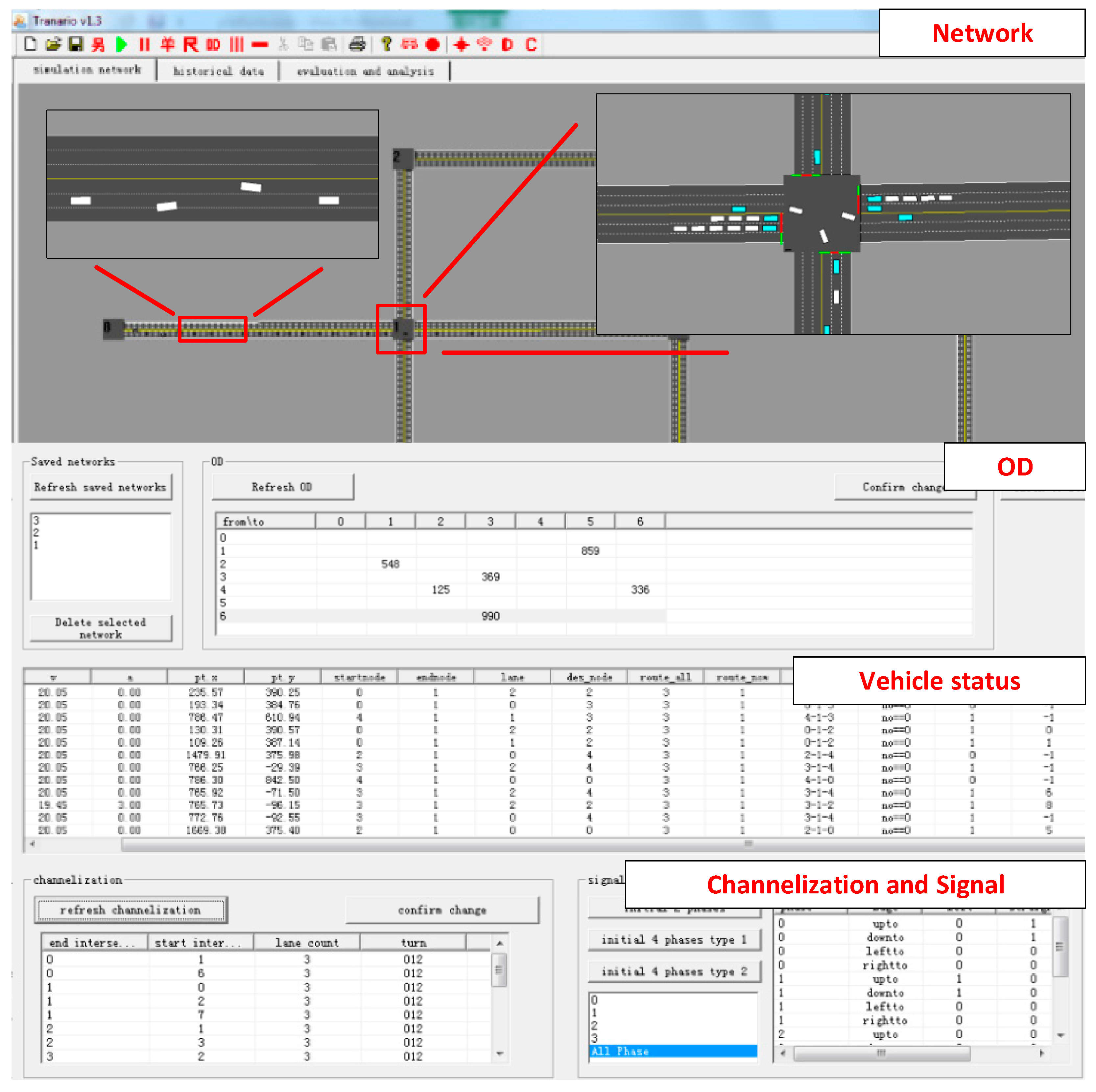
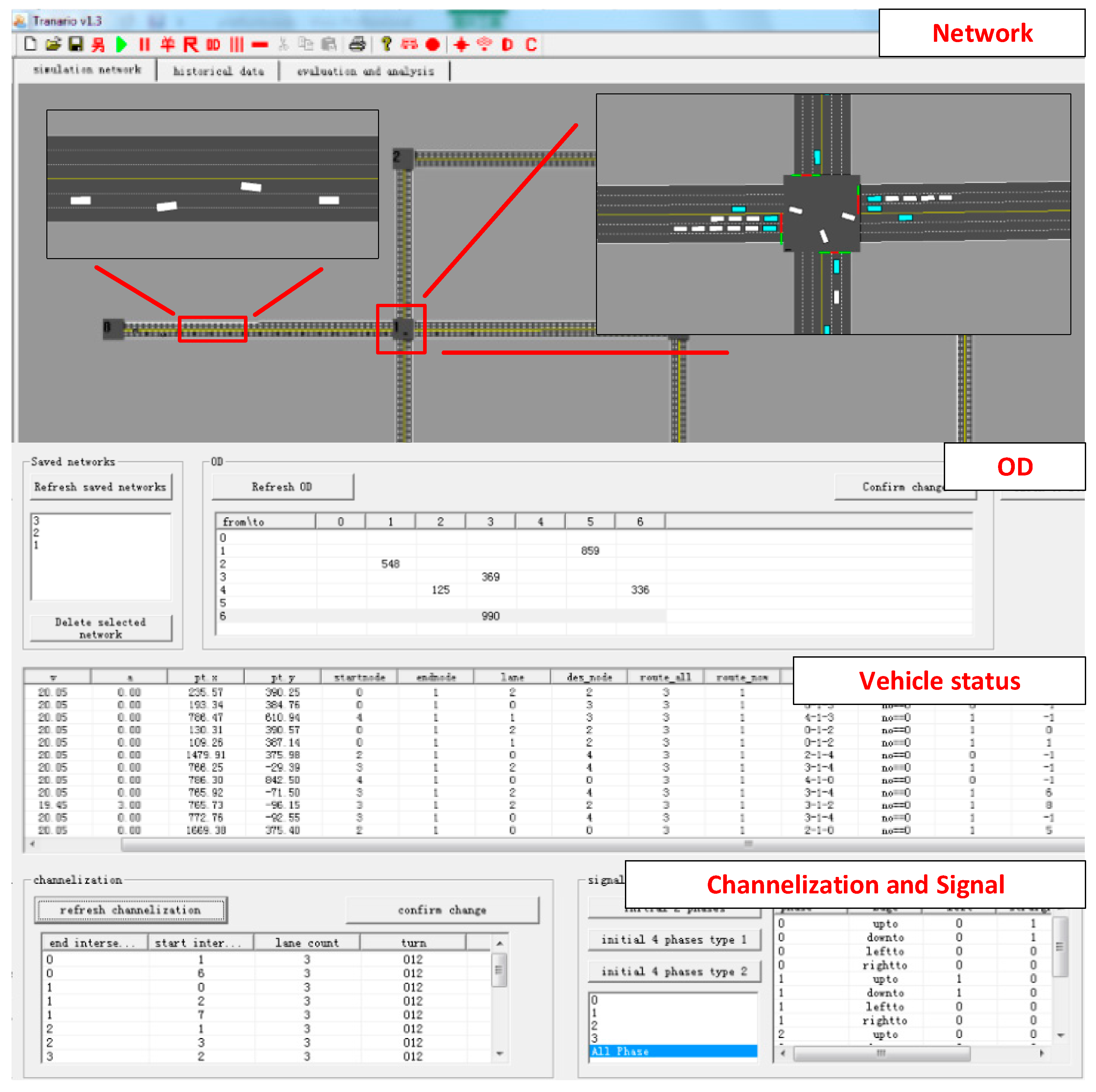
Besides the proposed simulation method, a user interface with a dozen of functions, which include establishing road network, setting parameters of the input, setting consecutive simulation model or single step model, road network saving, illustrating the simulation with graphics device interface (GDI) or GDI+, scaling and translating the display, etc., is designed to enhance the simulation. The simulation platform is showed in
Figure 13.
The comparison of link delay to traditional road network, influence of uncertainties to the pre-warning algorithms and a CAVs application are conducted in the platform to verify the applicability and reliability of the platform.
6.1. Vehicle Delay Comparison with Traditional Road Network
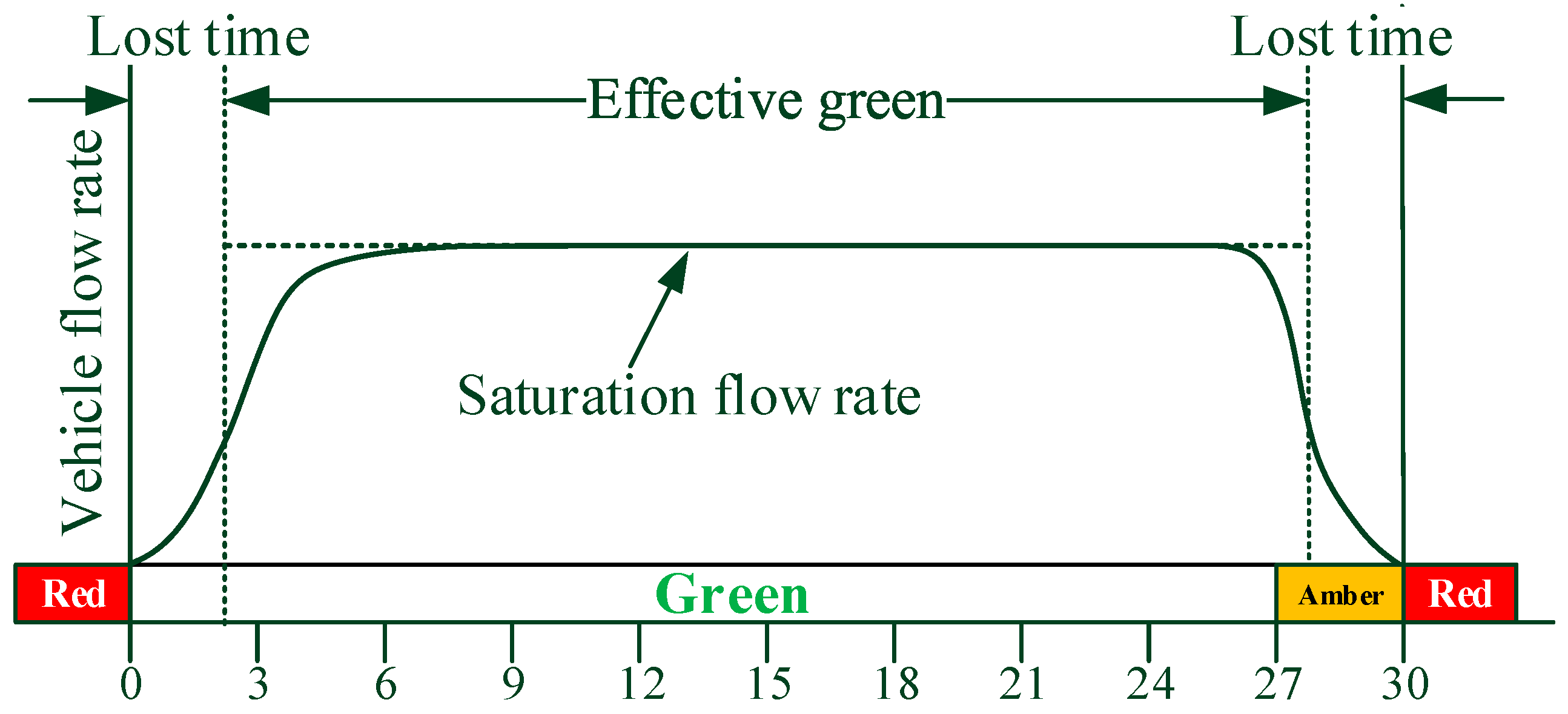
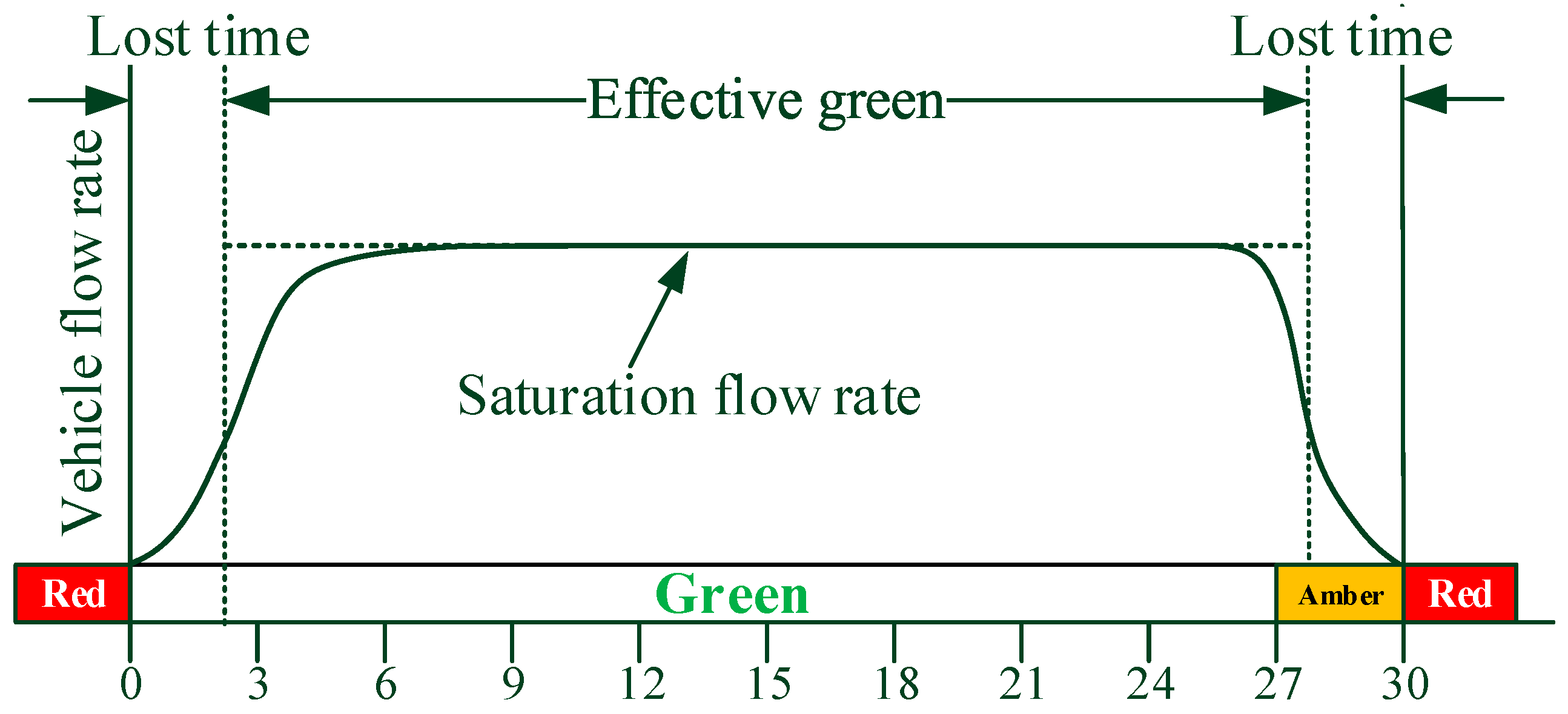
Scenarios and applications of CAVs are all based on traditional traffic flows. That whether the basic traffic flow coincides with the real traffic flow would significantly influence the results of any control strategies and algorithms verified in the platform. Vehicle average delay is analyzed in condition of fixed signal control to test and verify the reality of the platform. Volume to capacity ratio is introduced to the verification. The volume to capacity ratio is defined as below.
where
denotes the vehicle arrival flow rate,
denotes the saturation flow rate,
denotes the traffic signal cycle length,
denotes the effective green interval duration, and
denotes the volume to capacity ratio. The saturation flow rate value equals to 1800 vhc/h [
24]. The saturation flow rate is defined in
Figure 14.
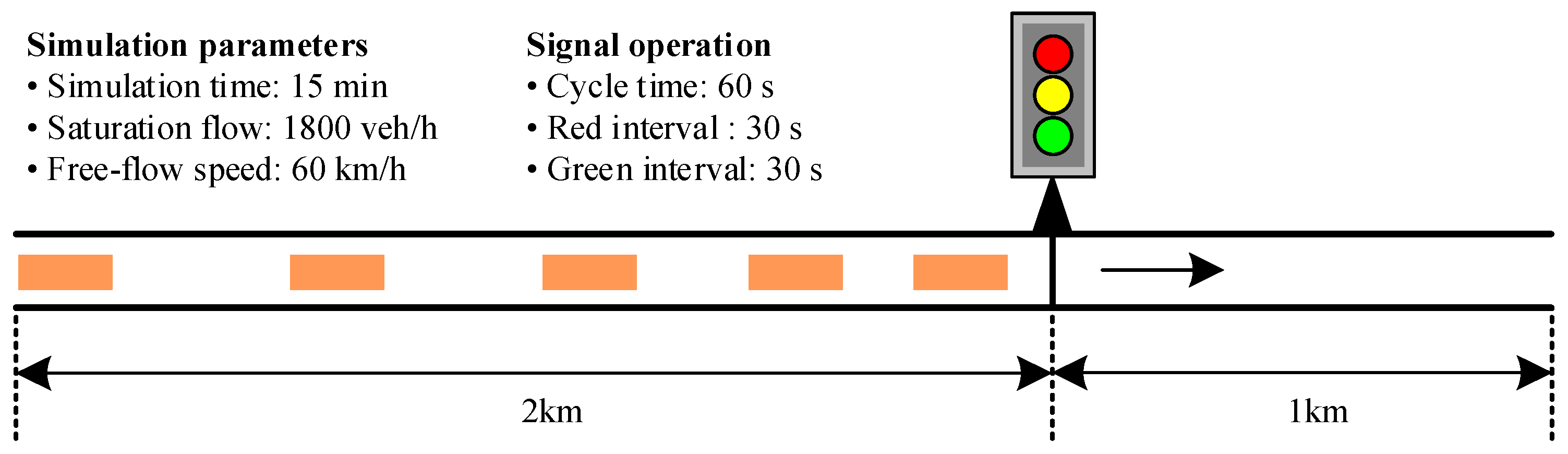
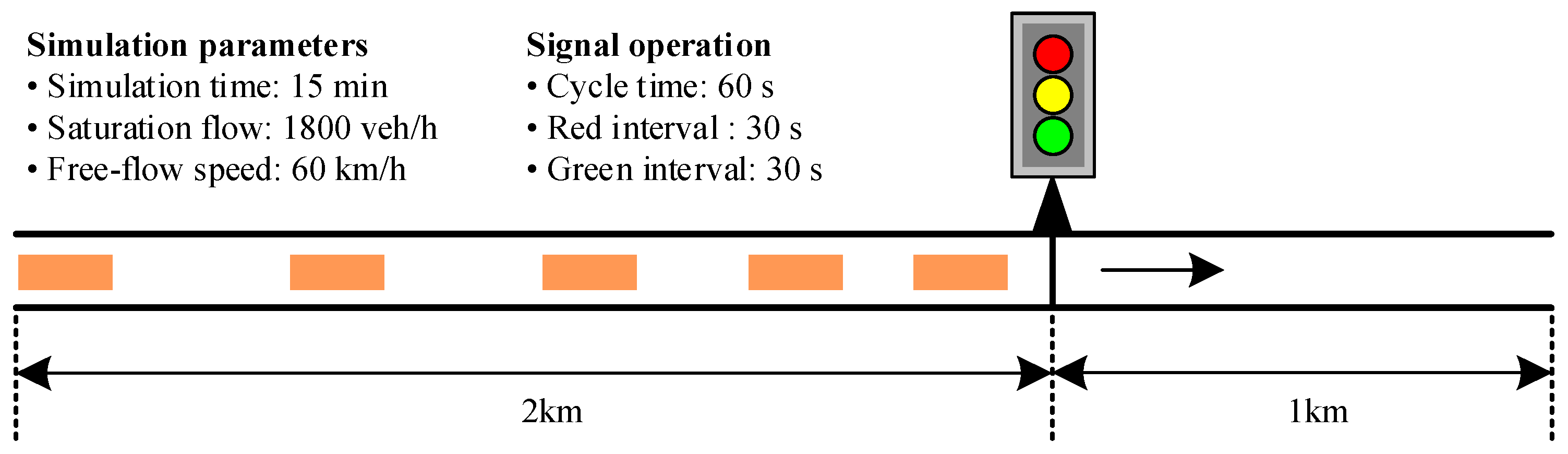
Due to the 1994 HCM delay estimate model [
25], a one-lane-one-intersection scenario is set up and simulated for 15 min to estimate the delay. The scenario is showed in
Figure 15.
Thanks to the vehicle kinematic models implemented in the platform, the saturation flow is approximately 1800 vhc/h at signal intersection.
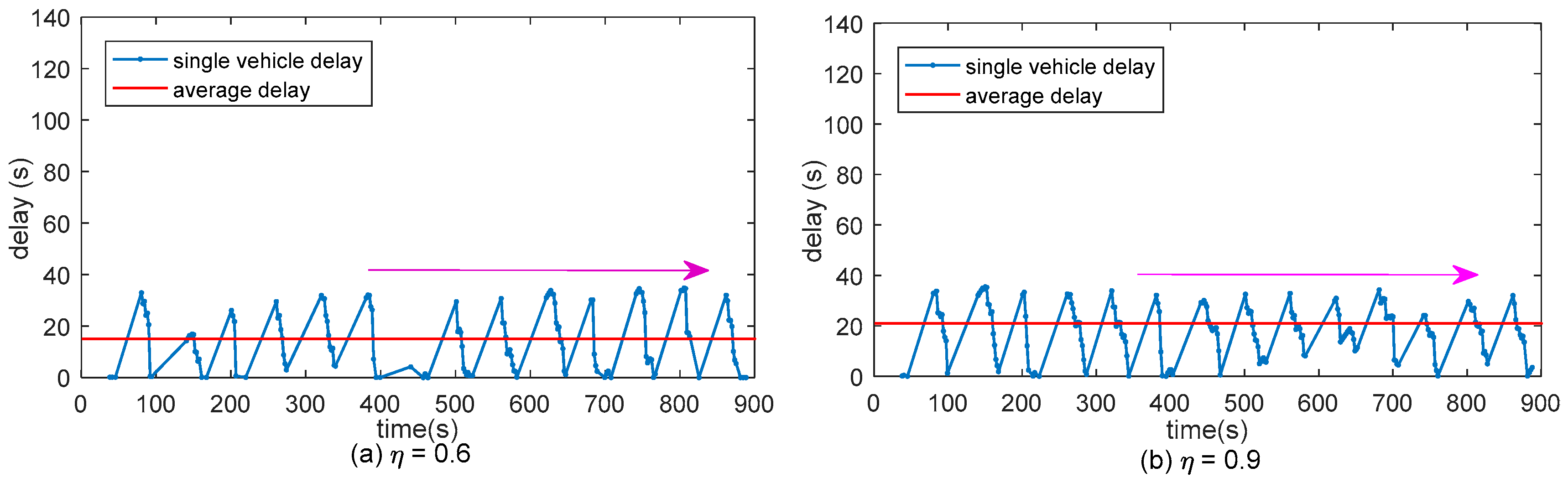
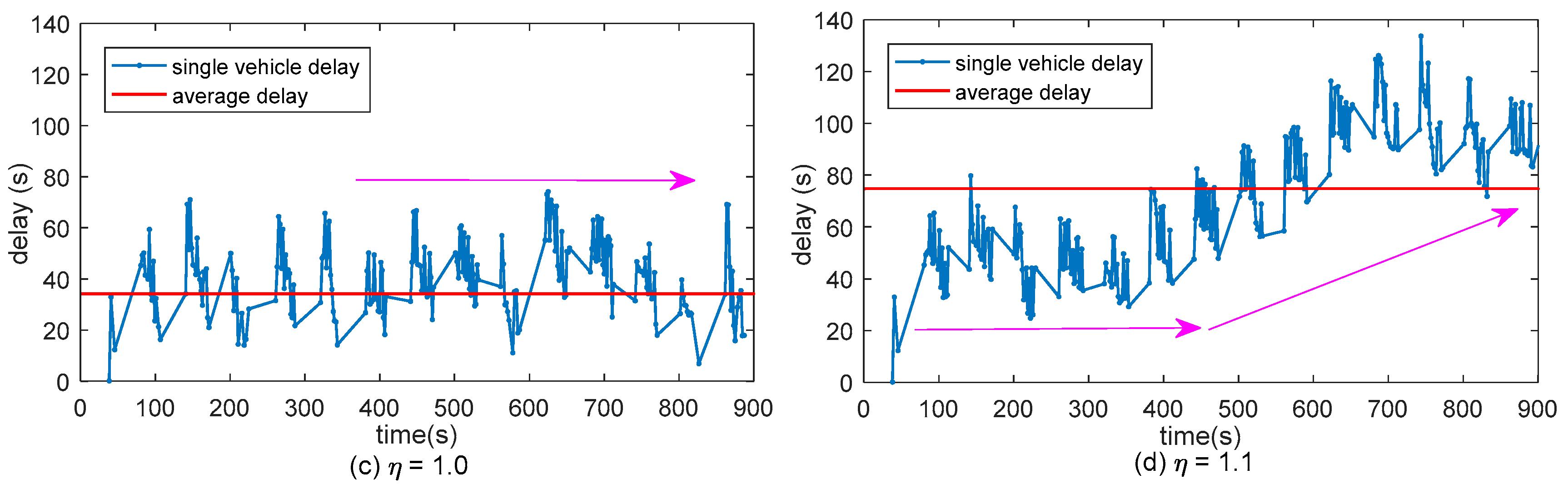
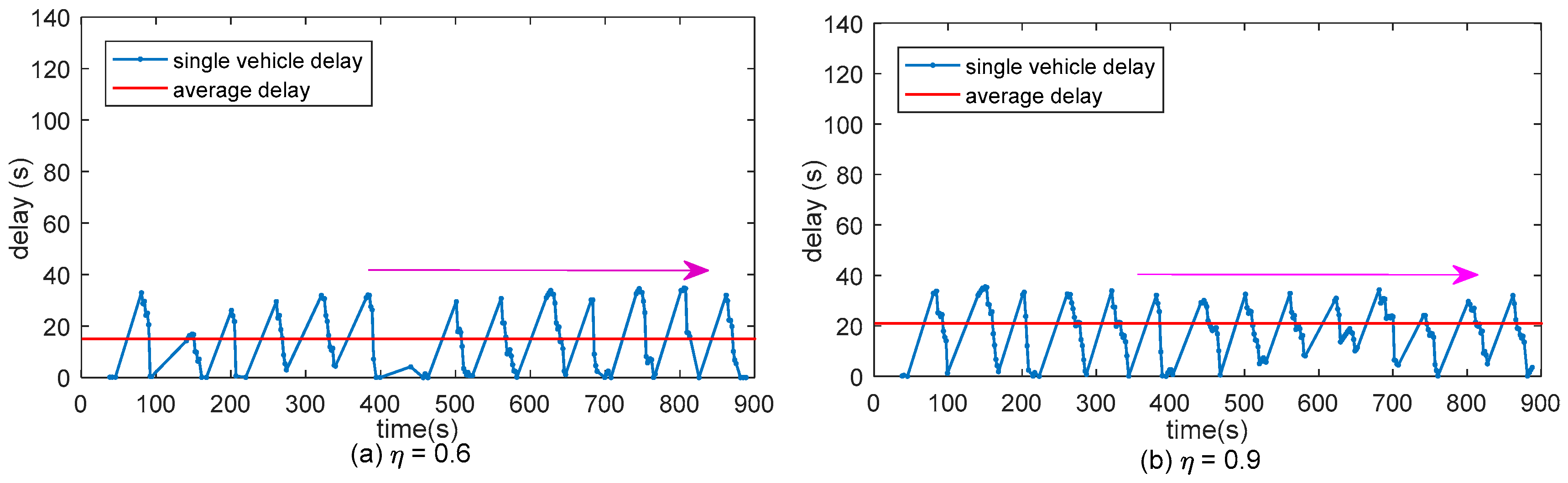
Figure 16 shows the results of the delay of every vehicle and the vehicle average delay in different volume to capacity ratio.
Delay data is calculated and saved when one vehicle reached its destination. Single vehicle delay vibrates because some of the vehicles are influenced by the red light while some vehicles are not. Average vehicle delay rises along with
. When
, single vehicle delay value remains in a certain range and when
single vehicle delay is rising along with the time, this condition reflects the definition of volume to capacity ration. Average delay in different
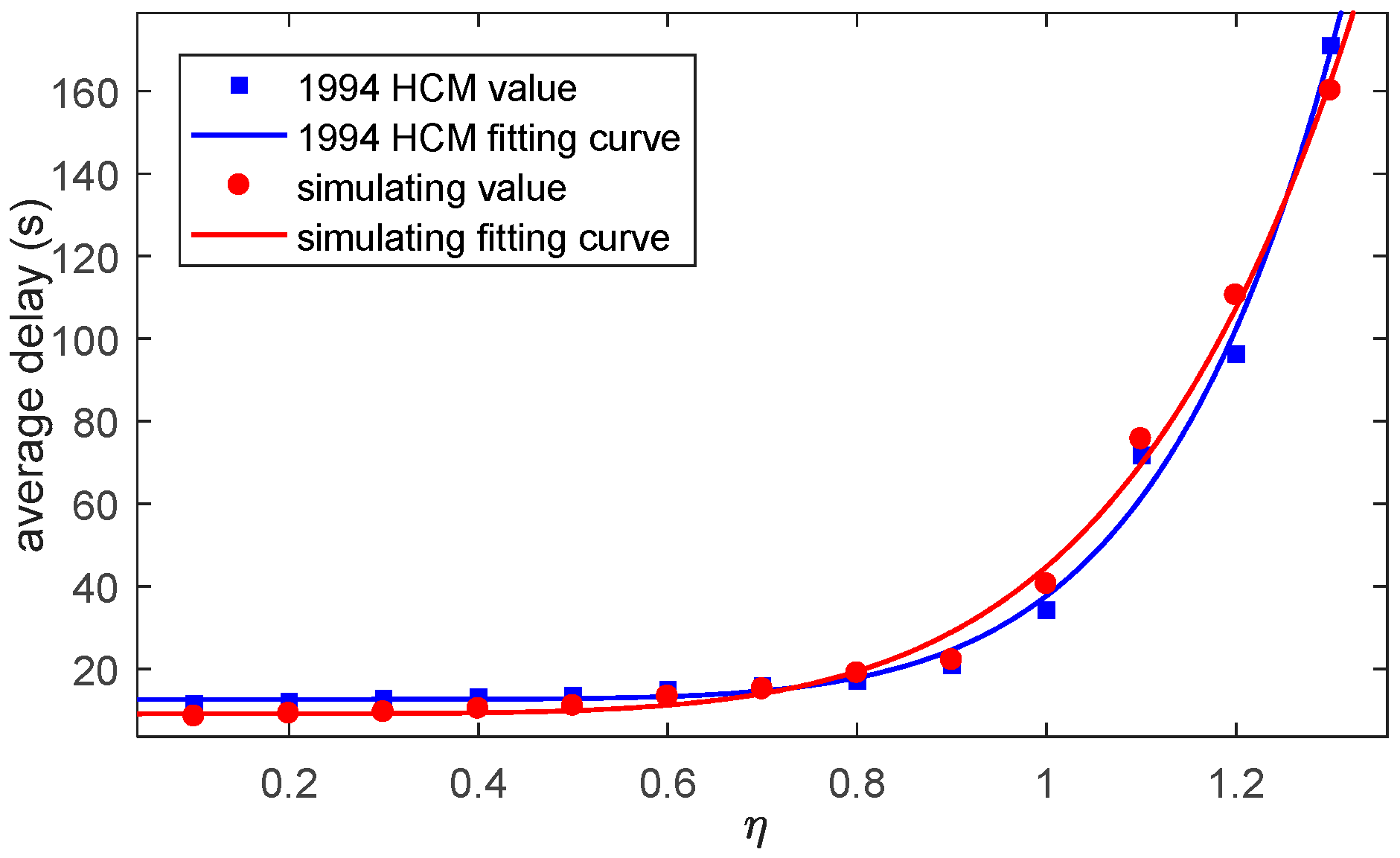
is simulated and is showed in
Figure 17.
Compared to the results from Dion [
24], the results simulated by the platform correspond to the results calculated by the HCM delay model, which indicate that the platform is reliable.
6.2. Verification of the Uncertainties
Pre-warnings are adopted to analyze the effect of the uncertainties models implemented in the platform. Hazardous vehicle maneuver of over speed is generated as basic scenario, and braking distance based pre-warning method with maximum deceleration of 6 m/s
2 [
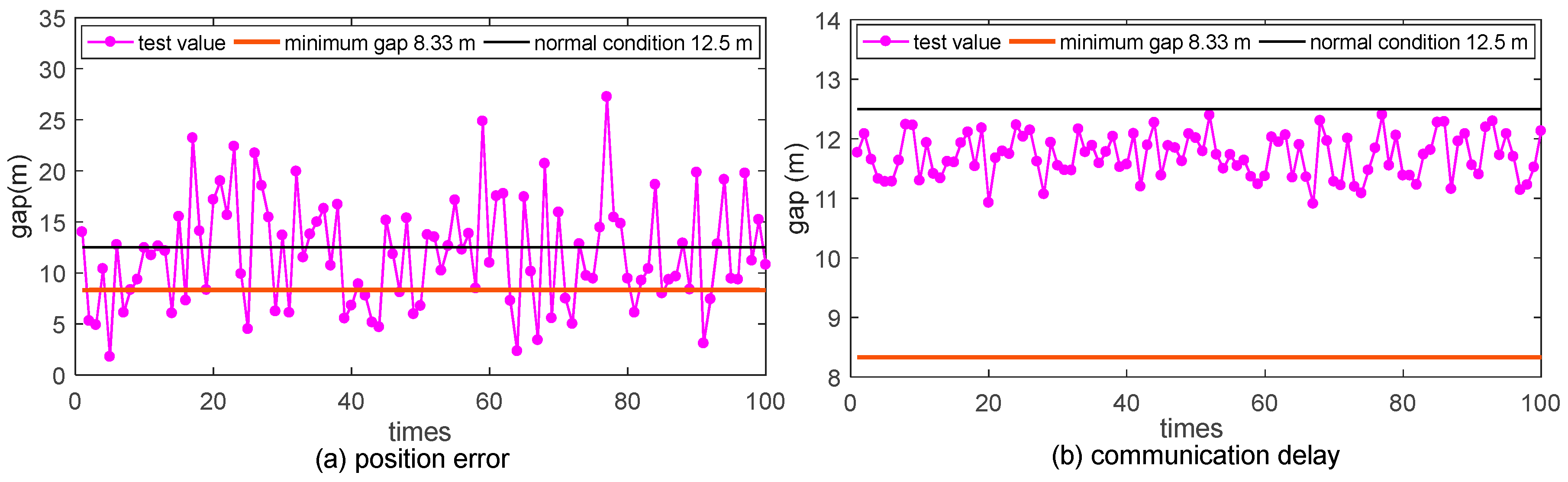
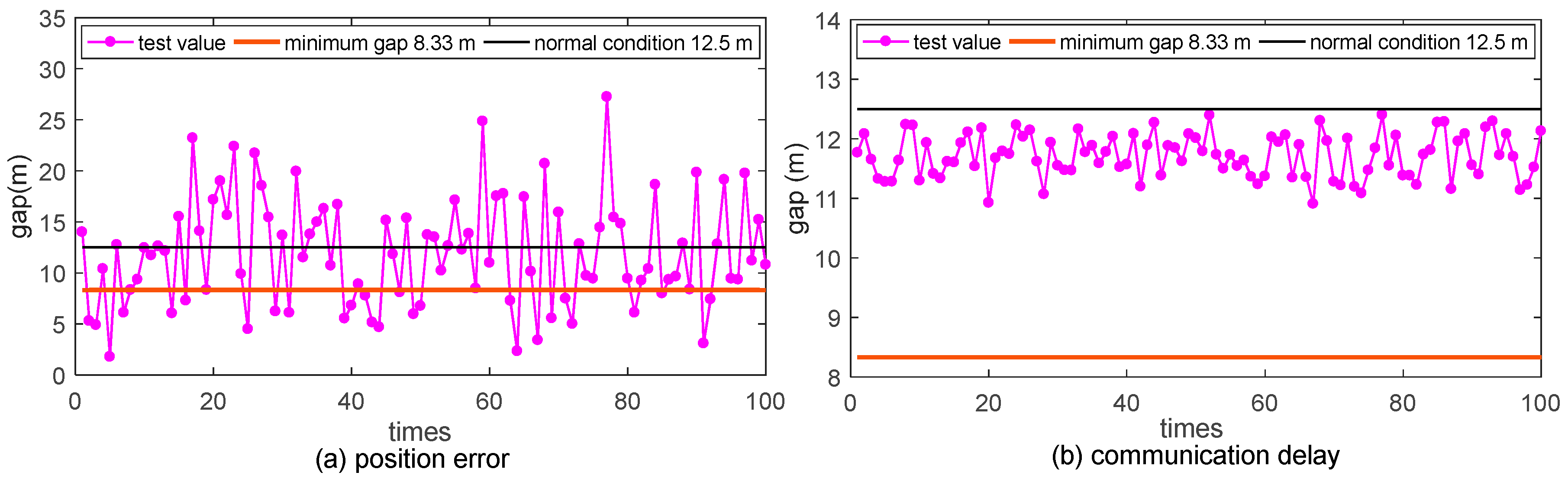
26] is embedded as the control strategy. The aforementioned Gaussian distribution based position error model with standard deviation of 4.37 and average value of 0, and Rayleigh distribution based DSRC communication delay model with standard deviation of 23.93 and average value of 29.98 are applied to simulation the uncertainties. The speed of the following vehicle is 30 m/s and the speed of the leading vehicle is 20 m/s. The scenario was executed 100 times and the results are showed in
Figure 18.
In the figure, the Y-axis denotes the distance between the following vehicle and the leading vehicle when the pre-warning is generated. The results of test value line are based on the test of uncertainties. The minimum gap line is based on the condition that the deceleration value in warning method equals to 6 m/s2 and the normal condition line is based on the condition that the deceleration value in warning method equals to 4 m/s2. In position error and communication delay simulation, the results fluctuate around the theoretical result. The distribution of the results corresponds with the Gaussian distribution model and Rayleigh distribution model. The results proved the reliability of the platform.
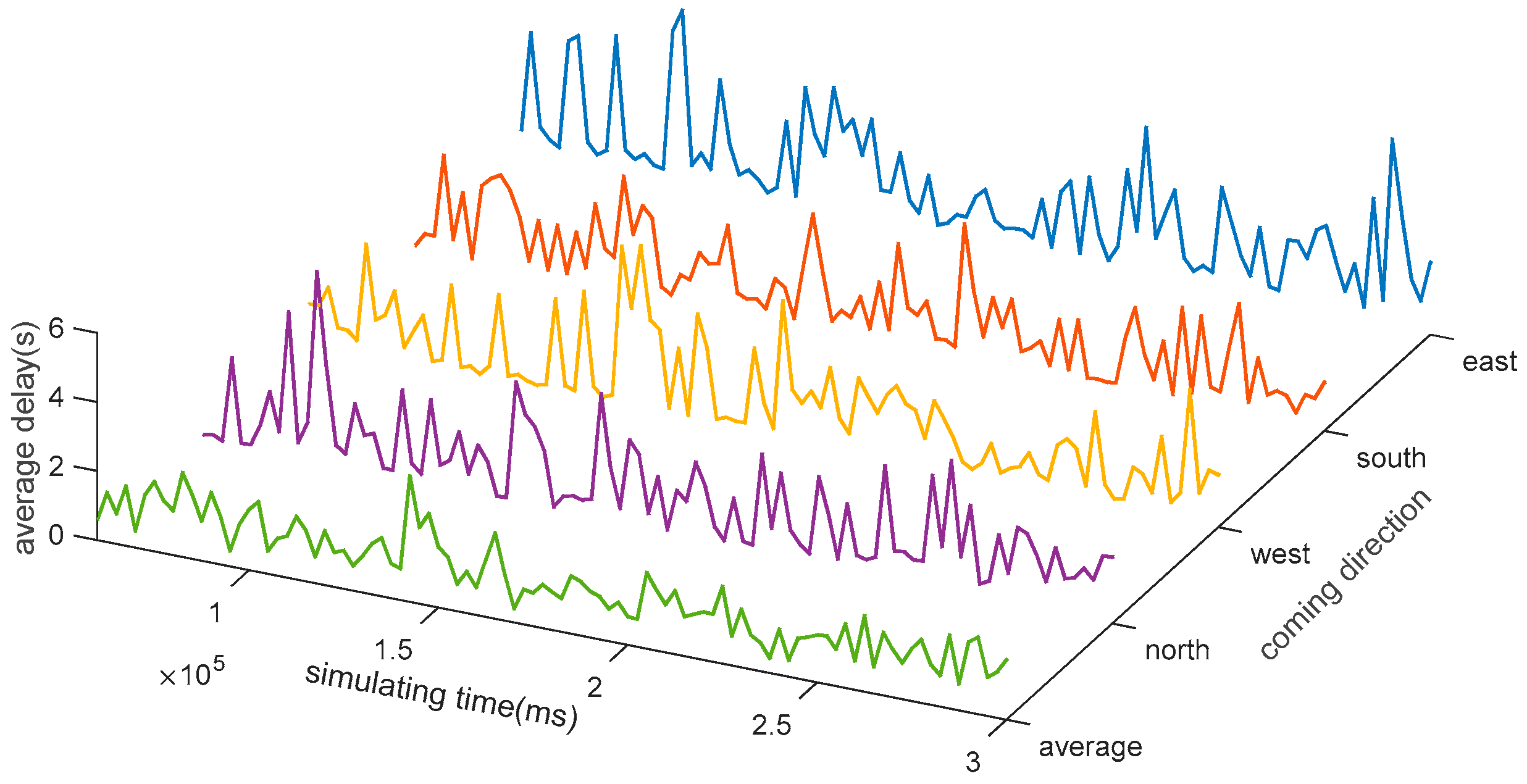
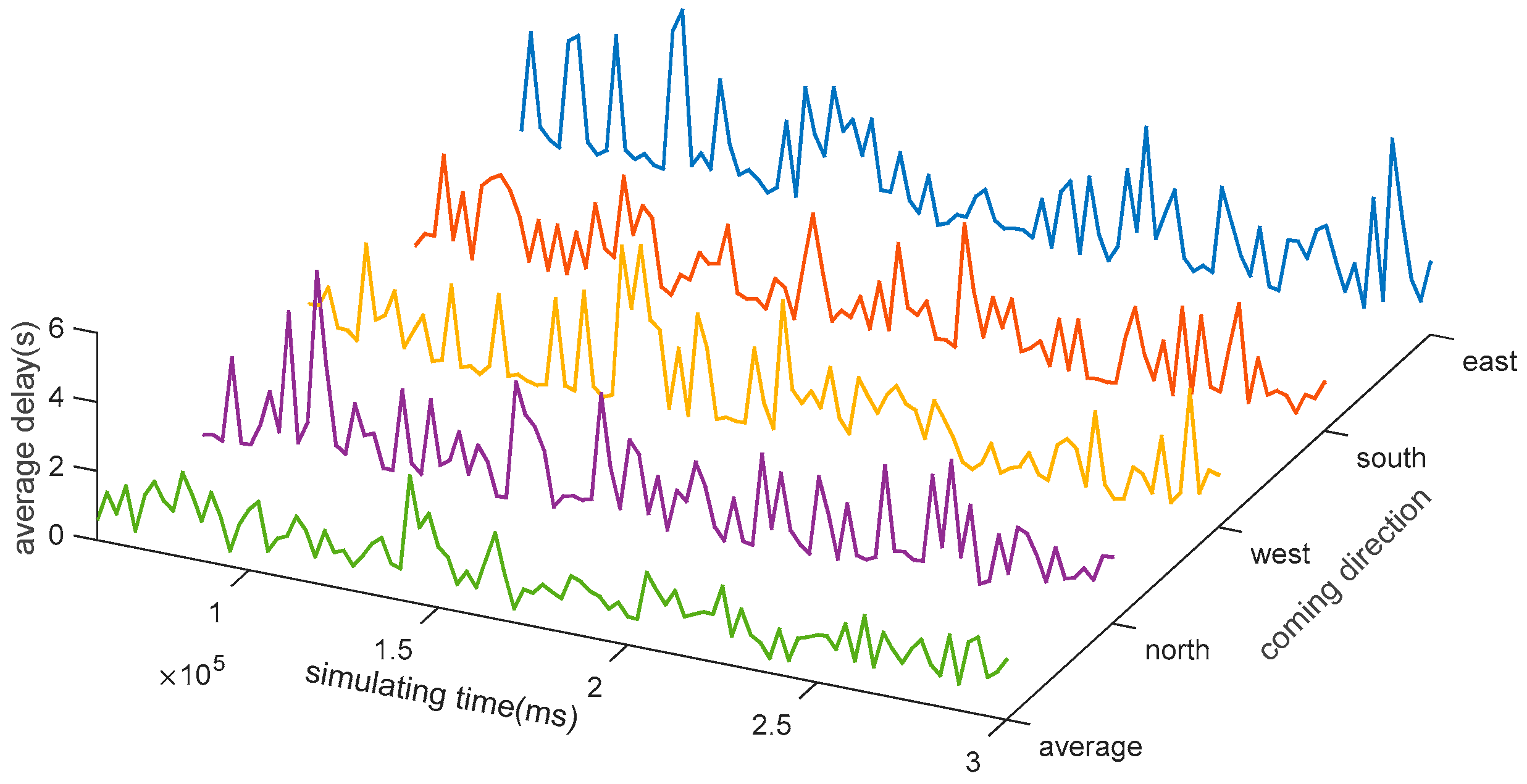
6.3. Verification of CAVs Application: Slot-Based Intersections
Tachet [
27] proposed a slot-based intersections (SIs) control strategy in CAVs. The concept of SIs is to enlarge the distance between two vehicles deliberately so that the conflicting vehicle can cross the intersection within the gap between the two vehicles. The SIs control strategy is implemented in the simulation platform and the control strategy is realized between the demonstrating layer and the uncertainties modeling layer. The intersection properties are the same with
Figure 5. Simulation of input of 360 vhc/h of each lane has been conducted and the average delay of the vehicles is showed in
Figure 19.
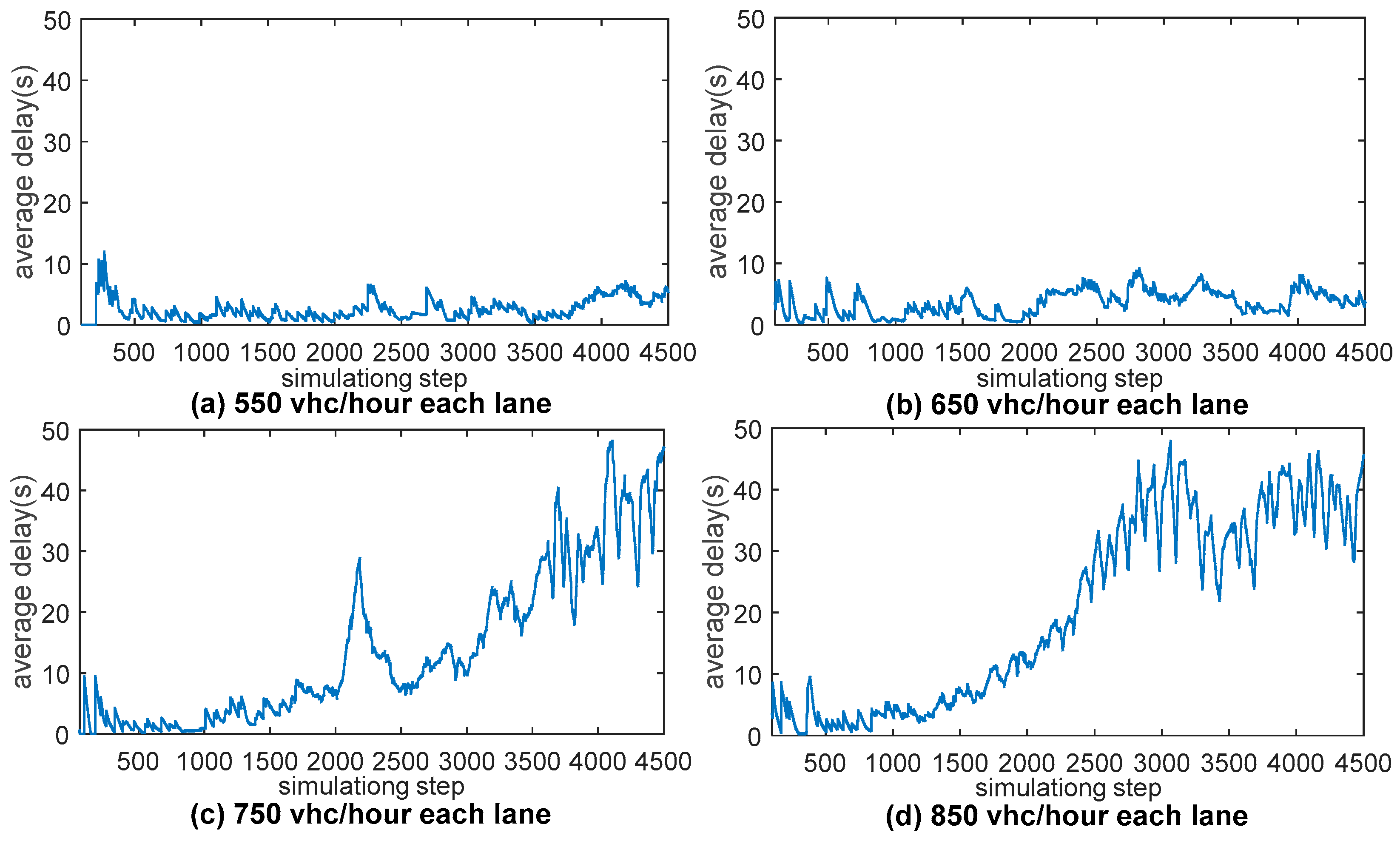
The coming directions are defined in the properties of intersection. Furthermore, based on the control strategy, simulation with input of 550, 650, 750 and 850 vhc/h per each lane has been conducted to estimate the bottleneck of the method. The results are showed in
Figure 20.
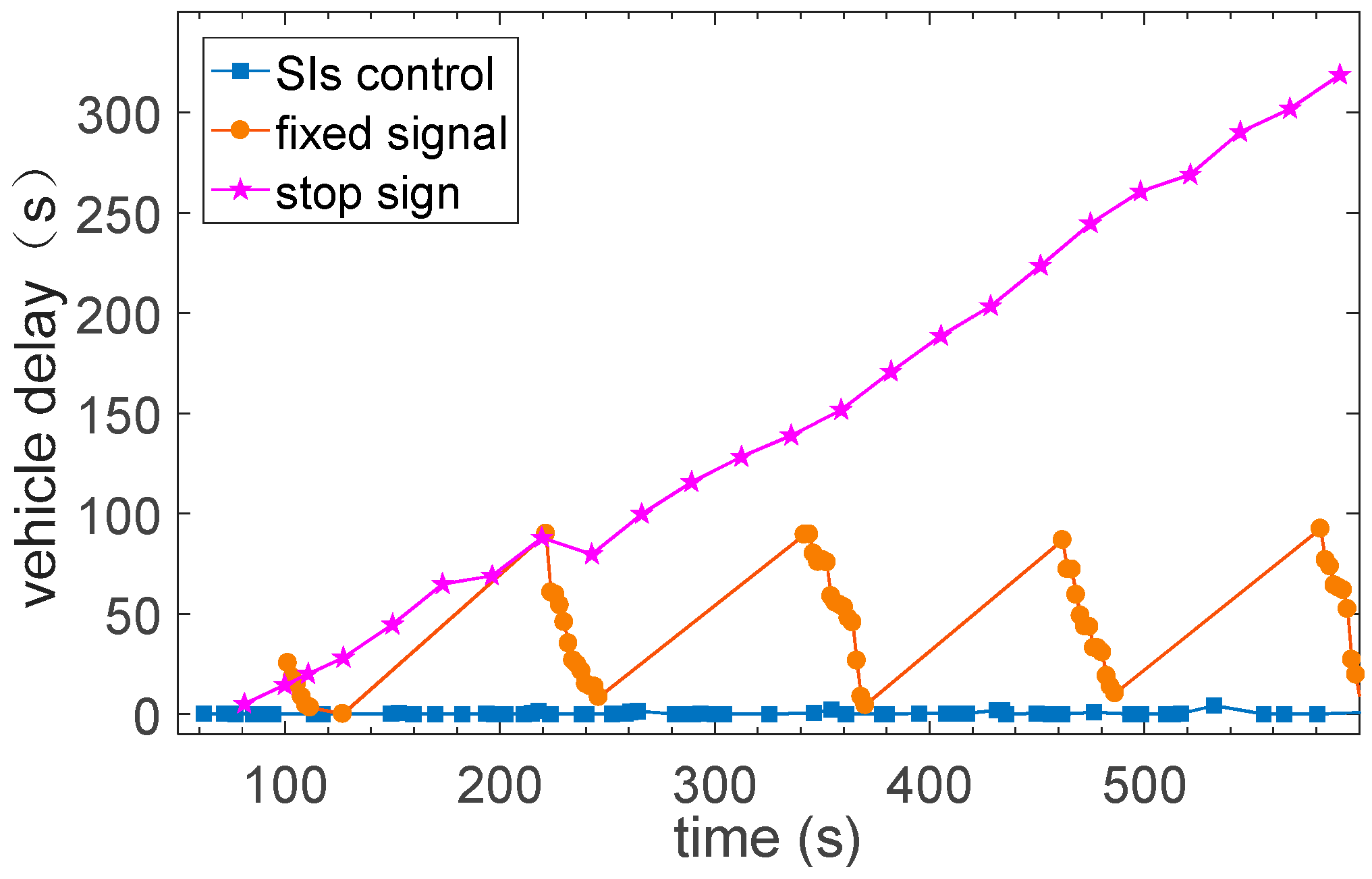
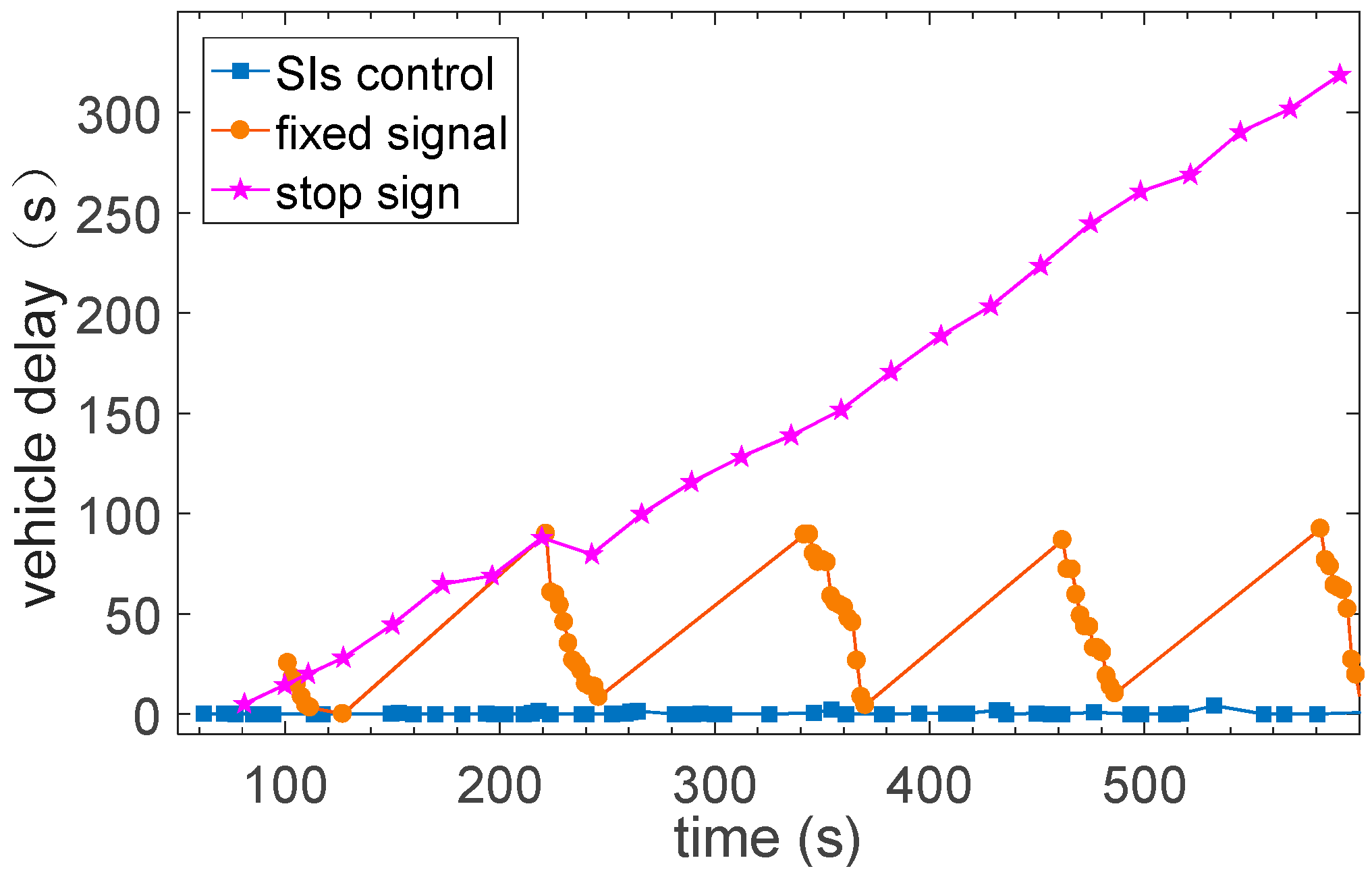
The bottleneck of the SIs control strategy does exist, and the value is between 650 and 750 vhc/h per lane. The simulation and the results indicate that the simulation platform is able to support the simulation and verification of CAVs applications. And three different intersection control strategies that are signal control, stop sign control and SIs control, are compared in the platform. And the simulation results are consistent with Tachet [
27]. The results are showed in
Figure 21.
7. Conclusions
A four-layer framework, which is composed with road network layer, vehicle operating layer, uncertainties modelling layer and demonstrating layer, for CAVs kinematic simulation is proposed in this paper. By conducting verification of comparison of link delay to traditional road network, influence of uncertainties to the pre-warning algorithms and a CAVs application, the methodology proposed in this paper turns out to be reliable. This paper proposed a method of how to establish the basic CAVs kinematic simulation environment. Framework and models are discussed. The correlations of different vehicle kinematic models, vehicle trajectory and road network are established. Based on the basic CAVs simulation environment, highly specialized scenarios and control strategies related to CAVs are able to be realized precisely. Due to the four layer framework of the methodology, models are easy to be replaced or updated as long as the outputs of the new models are subject to the definitions of the intersections and the vehicles.
In the proposed method, the number of maximum directions of an intersection is designed to be four. Although a four-legged intersection can cover most of the realistic situations, the intersection attributes still should be updated to involve more intersection characteristics. For different intersections, the in-intersection trajectory of the vehicle differs. The vehicle position updating method is not precise enough to describe the movement of the vehicles, especially in the situation when vehicle turns.
Infrastructures are not modeled and simulated in the paper. Although infrastructure can be simulated by separating its functions to scenario and control strategy, this is not an optimal solution. Infrastructure should be considered as an embedded component of the simulation framework. Basic operating mechanism of the infrastructure should be designed, and basic attributes of the infrastructure should be maintained.
This work proposed a method to build basic CAV kinematic simulation environment. The aim of the work is to help verify CAV based applications, so the performance of the simulation would directly influence the time-consuming of the verification. The simulation platform in this paper is established based on basic programming technology. The simulation would not be smooth enough when the road network and the traffic is large. Software engineering of computing, display based on GDI and the synchronization between them should be deeply researched. More uncertainties models should be implemented in the uncertainties modelling layer.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}