A Novel Partial Discharge Localization Method in Substation Based on a Wireless UHF Sensor Array





Abstract
1. Introduction
2. Overview of the Proposed PD Localization Method
3. Offline Stage
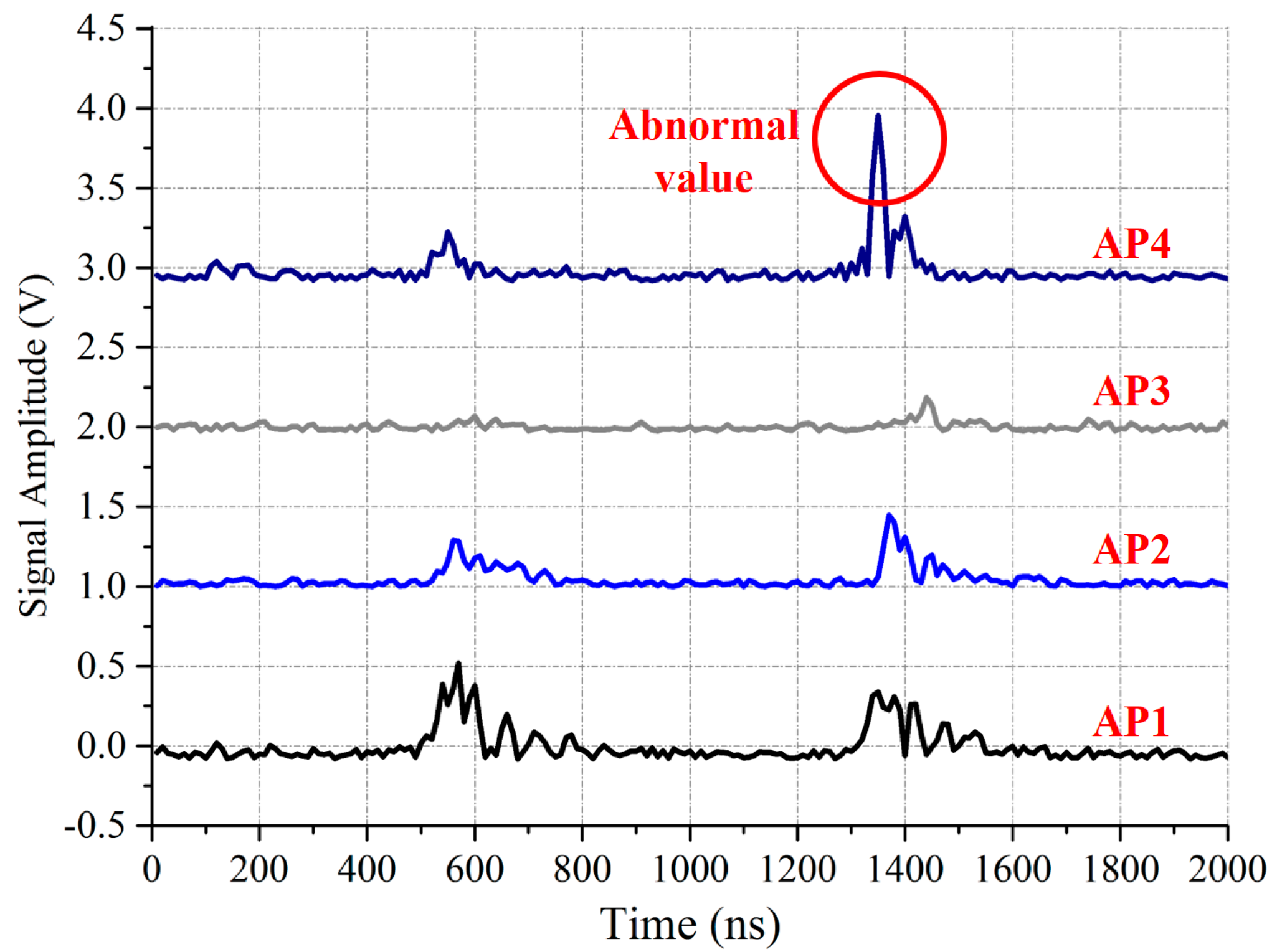
3.1. Data Acquisition and Processing
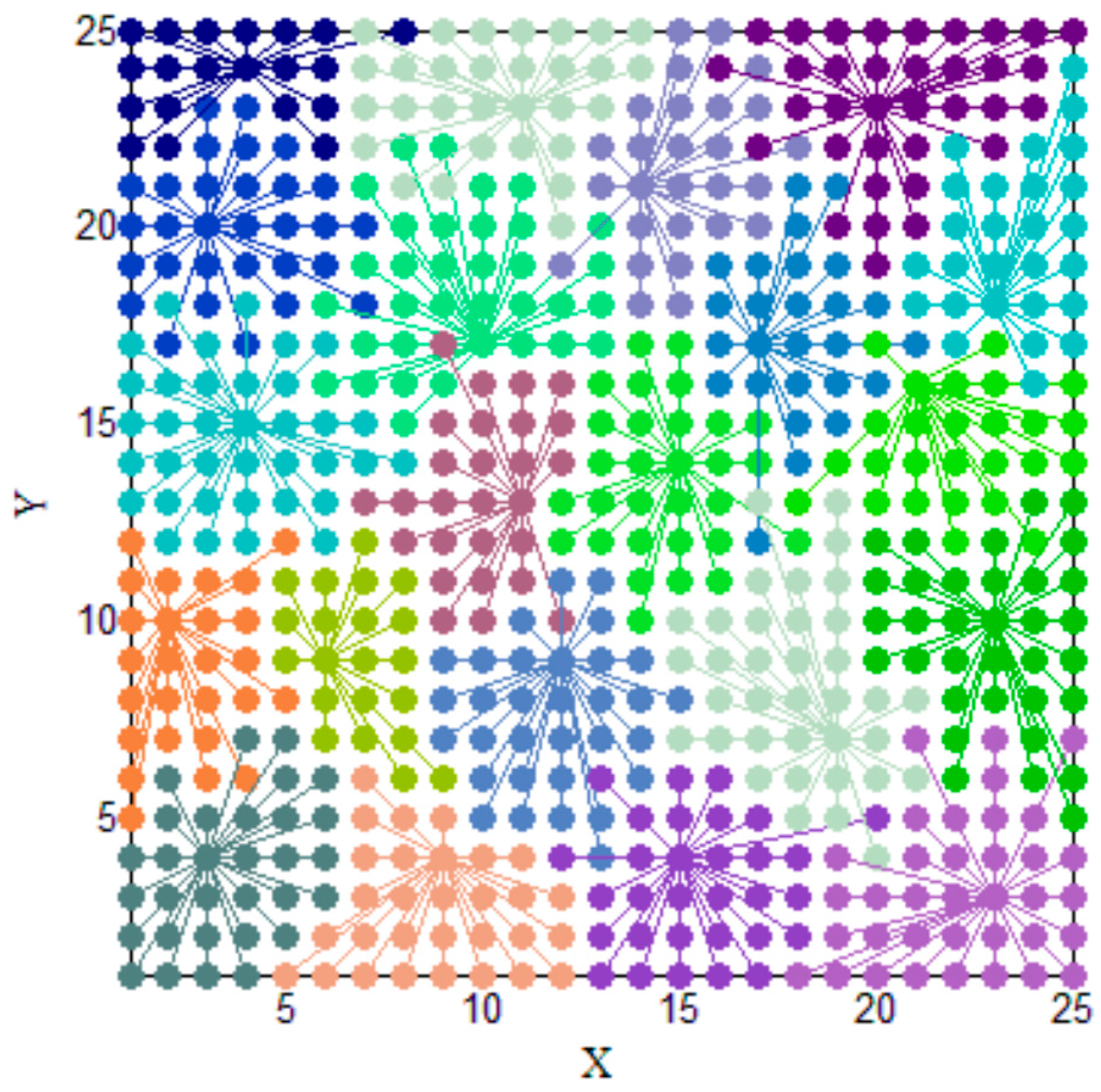
3.2. Affinity Propagation Clustering
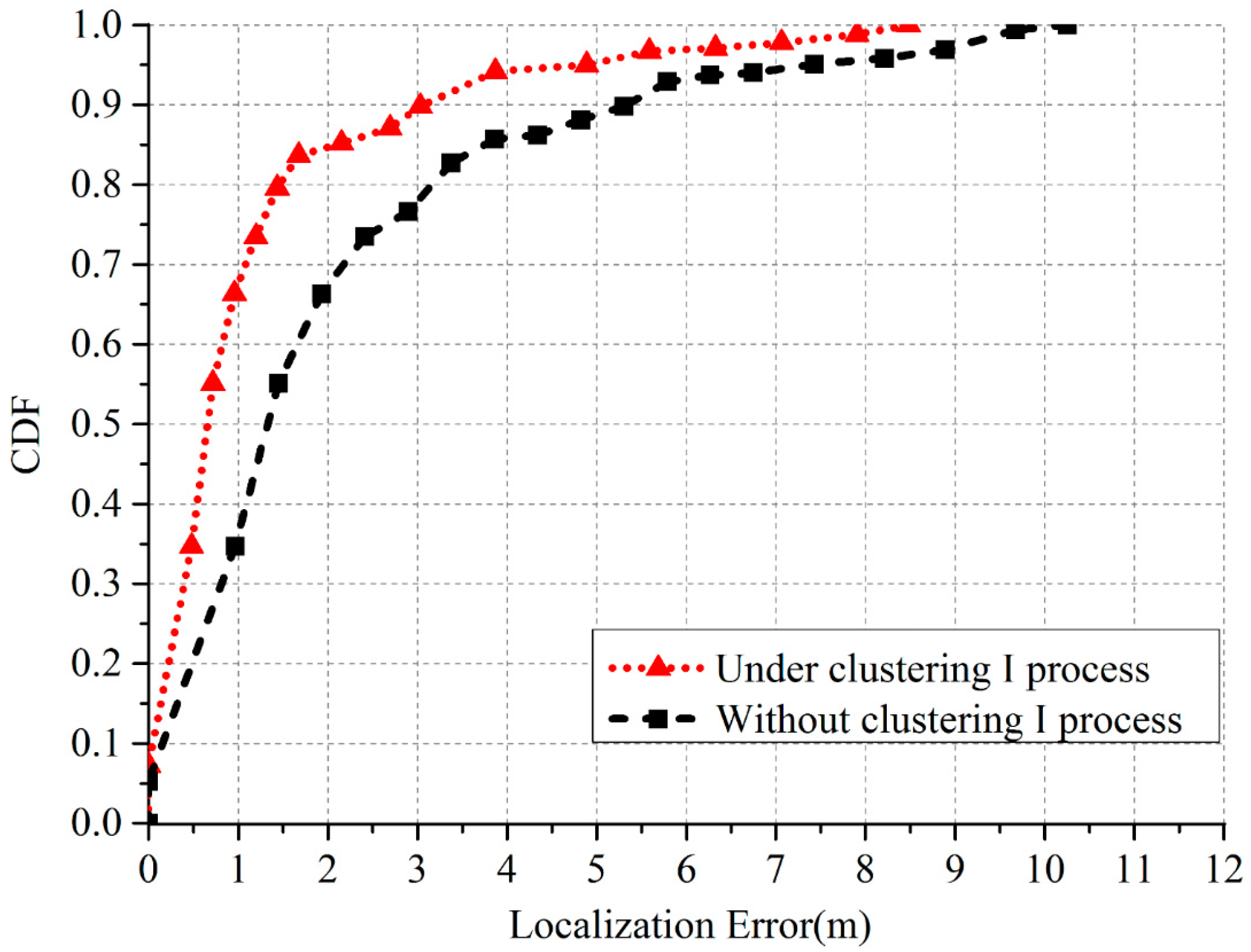
3.2.1. Clustering I
3.2.2. Clustering II
4. Online Stage
4.1. Preliminary Localization by Cluster Recognition
4.2. Accurate Localization by CS Algorithm
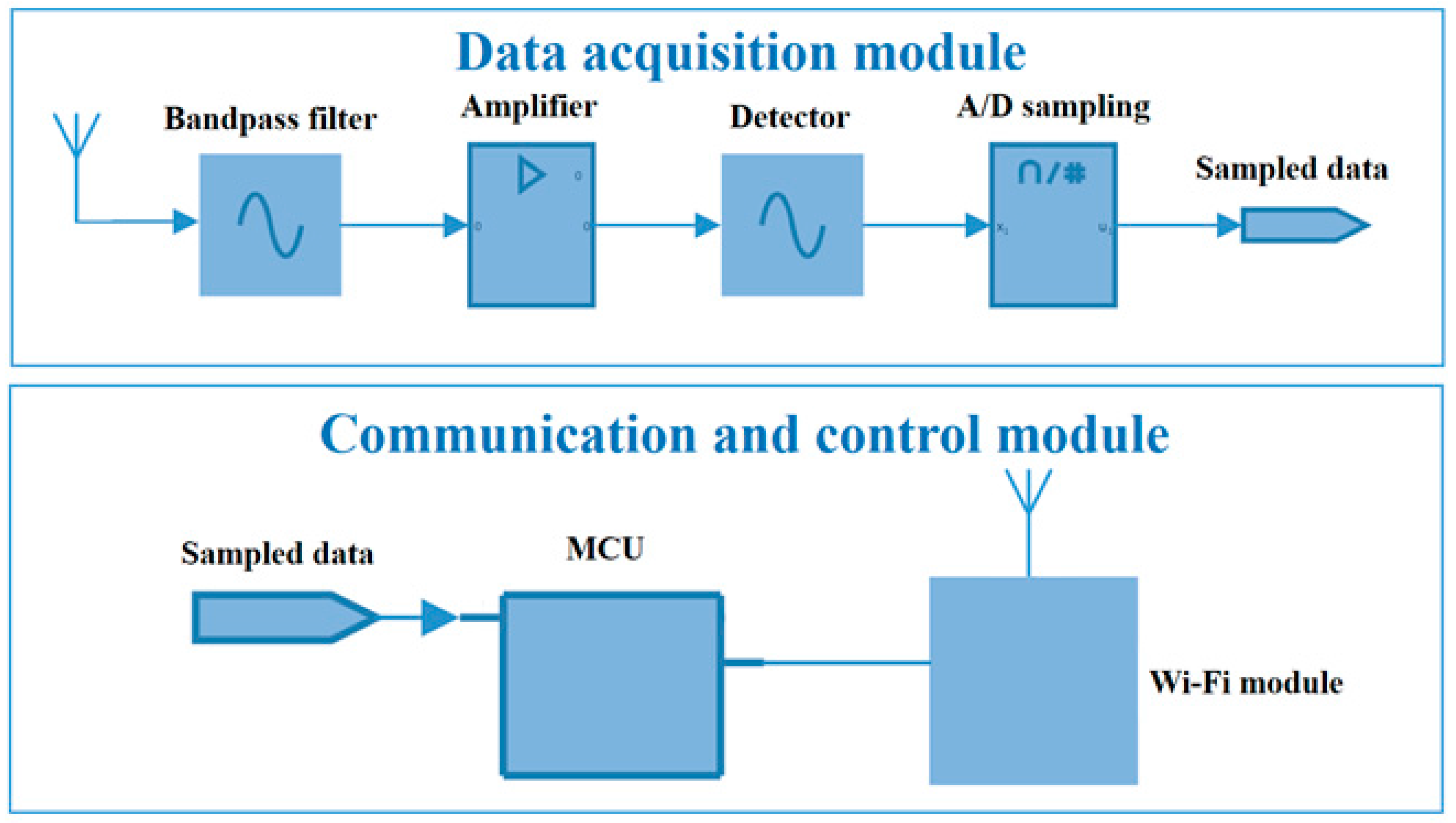
5. Hardware Design
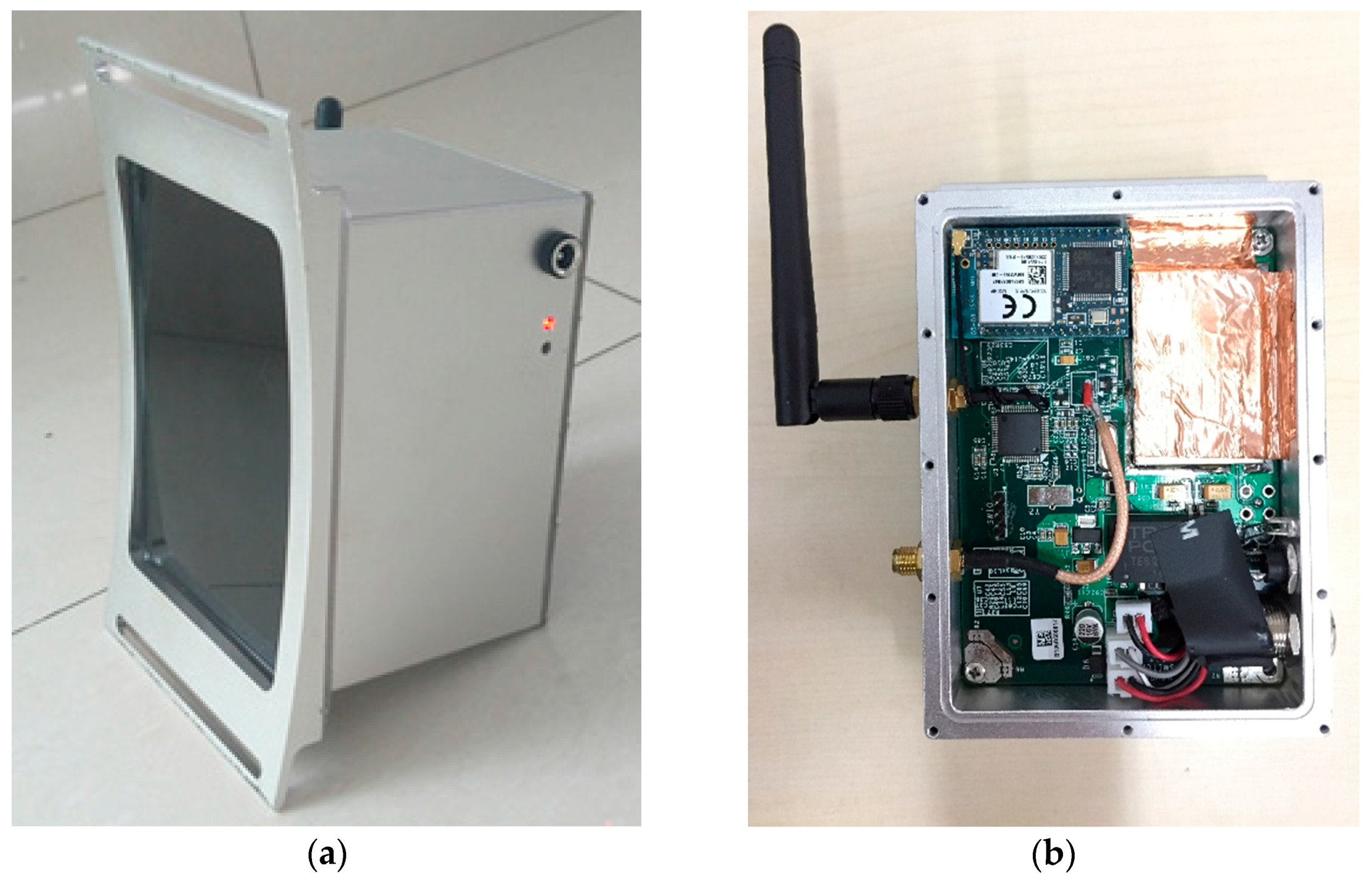
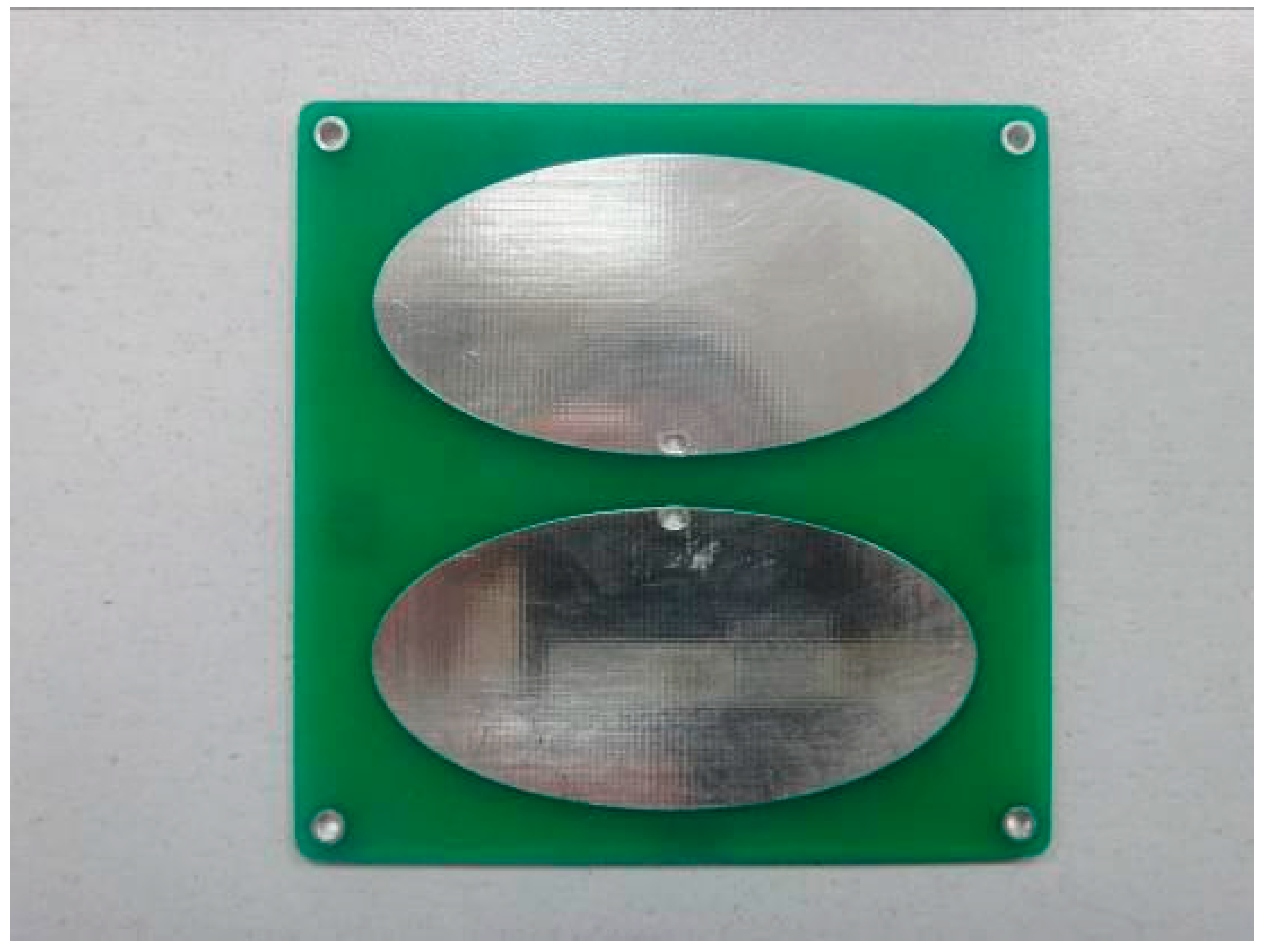
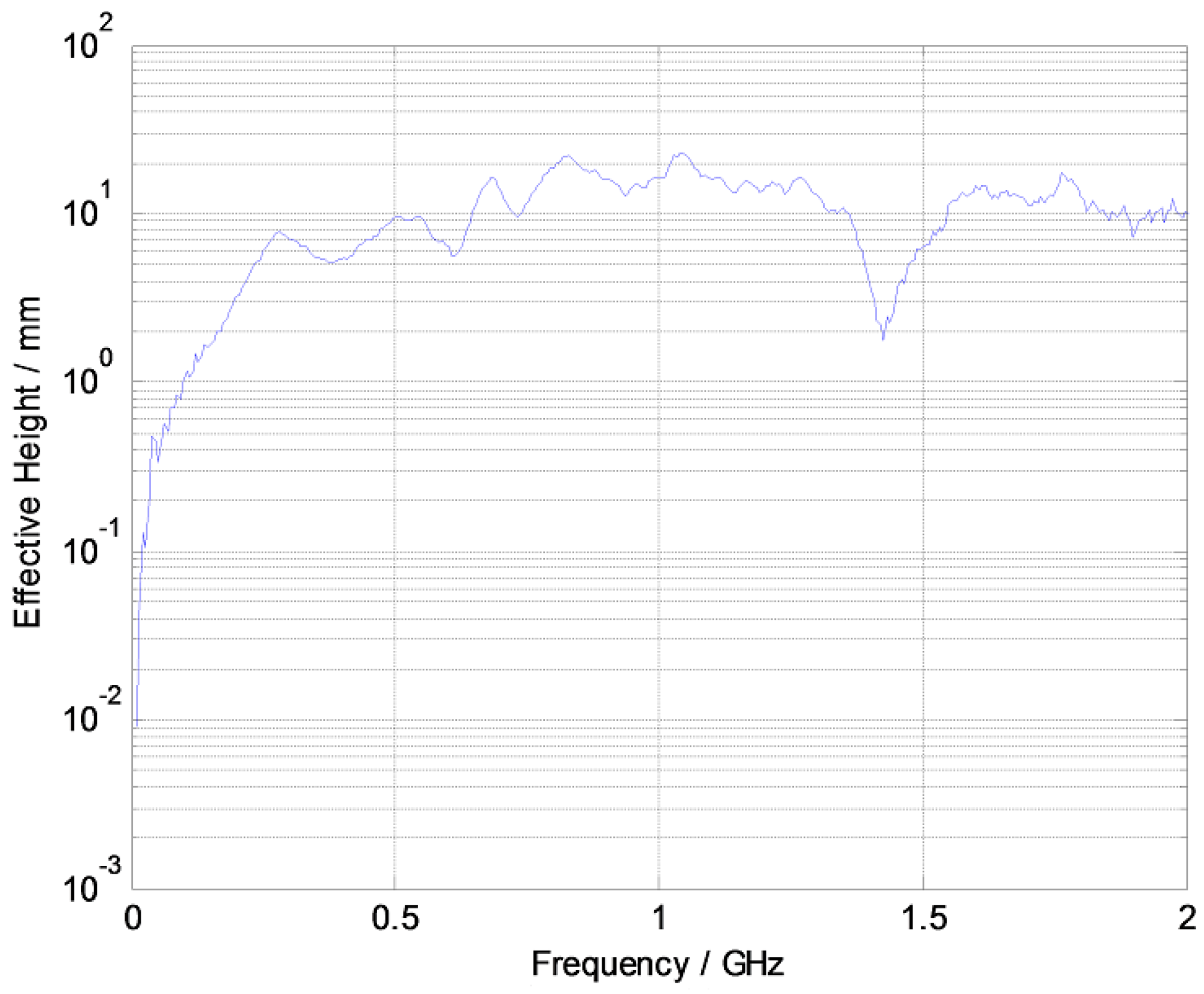
5.1. Wireless UHF Sensors
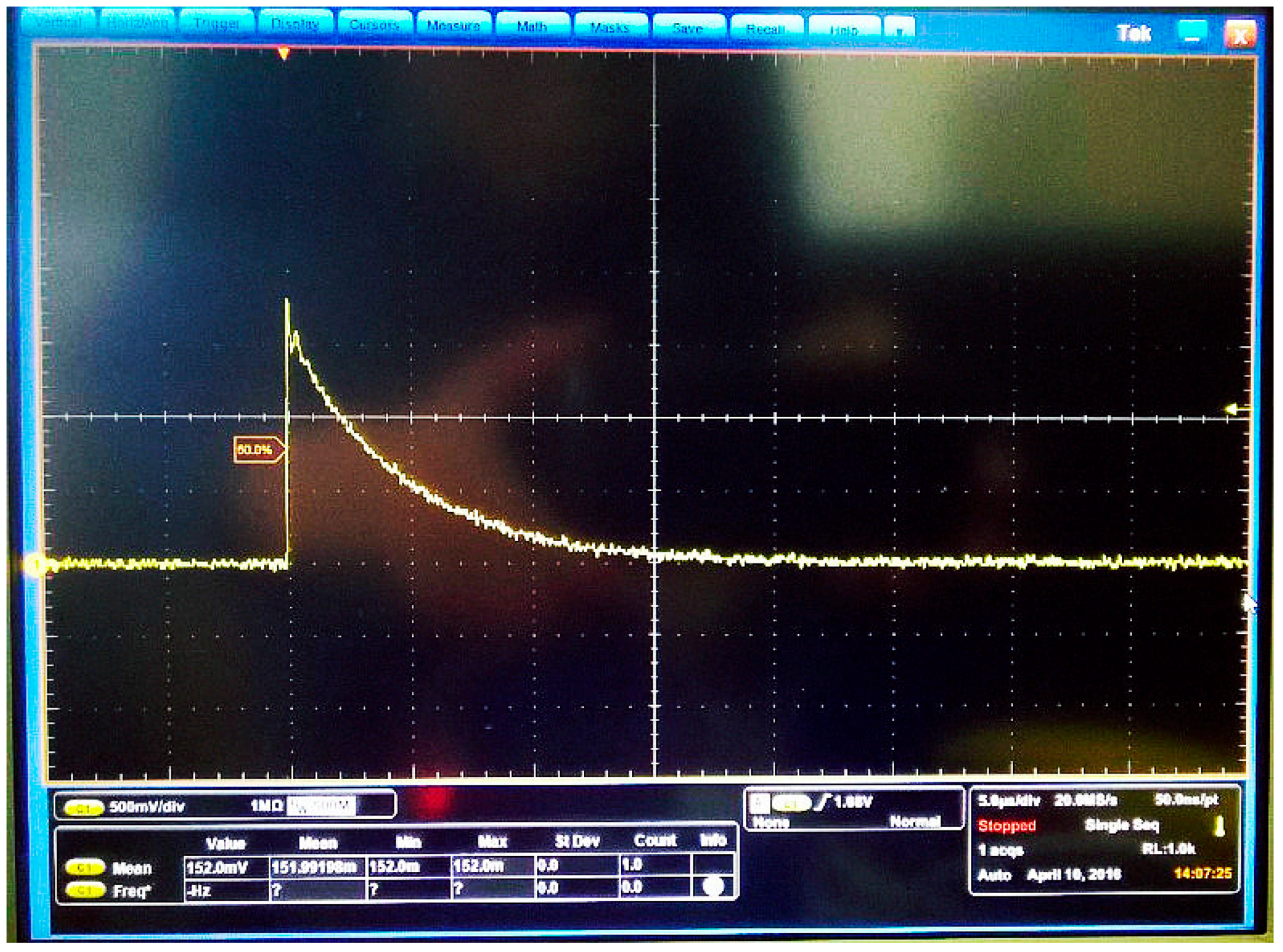
5.2. PD Source
6. Experimental Verification
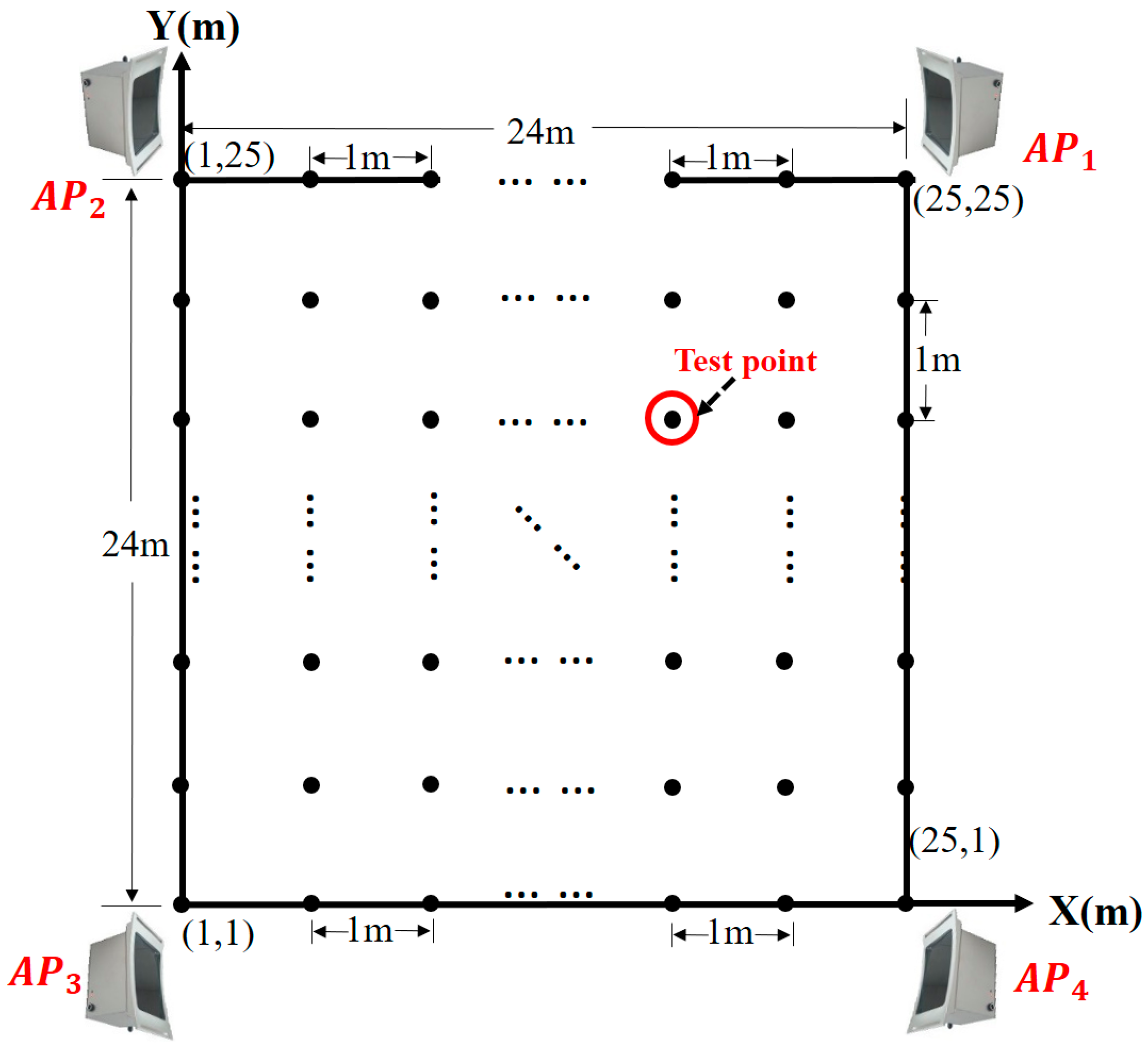
6.1. Experimental Scheme
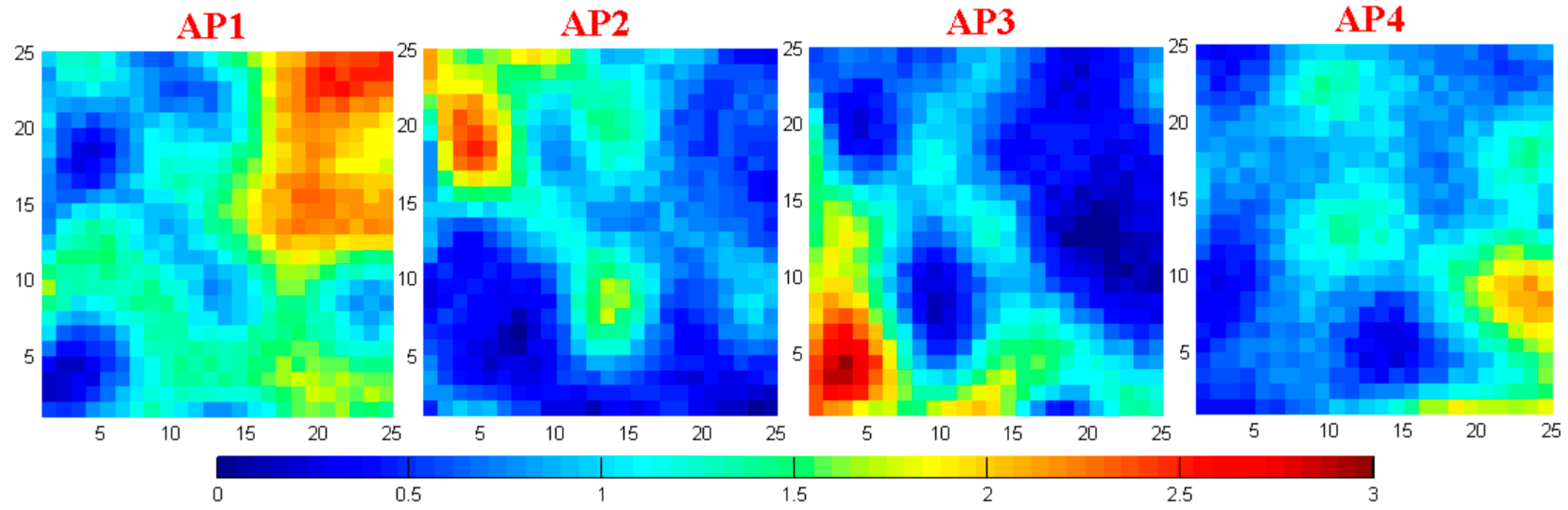
6.2. Performance Evaluation of Offline Stage
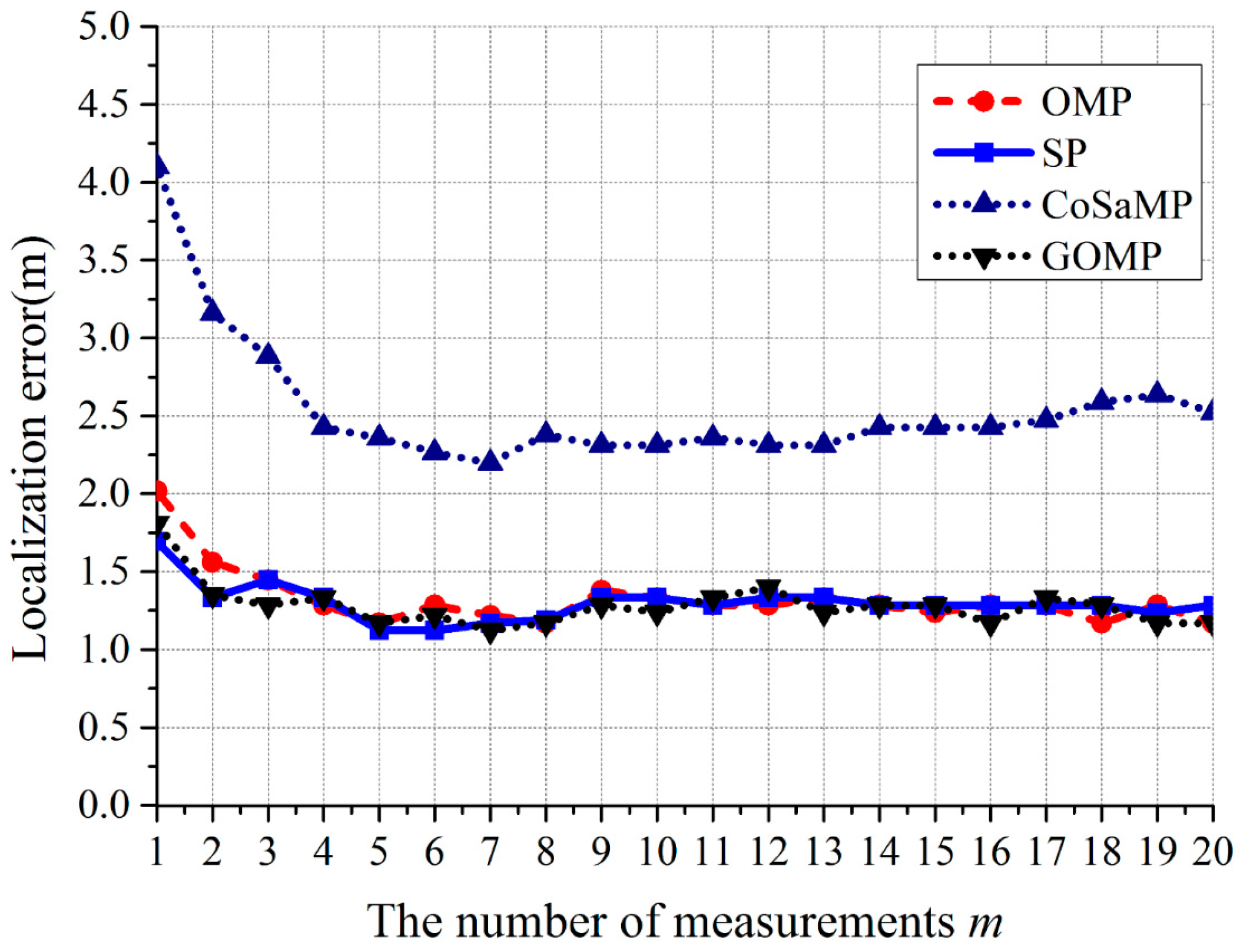
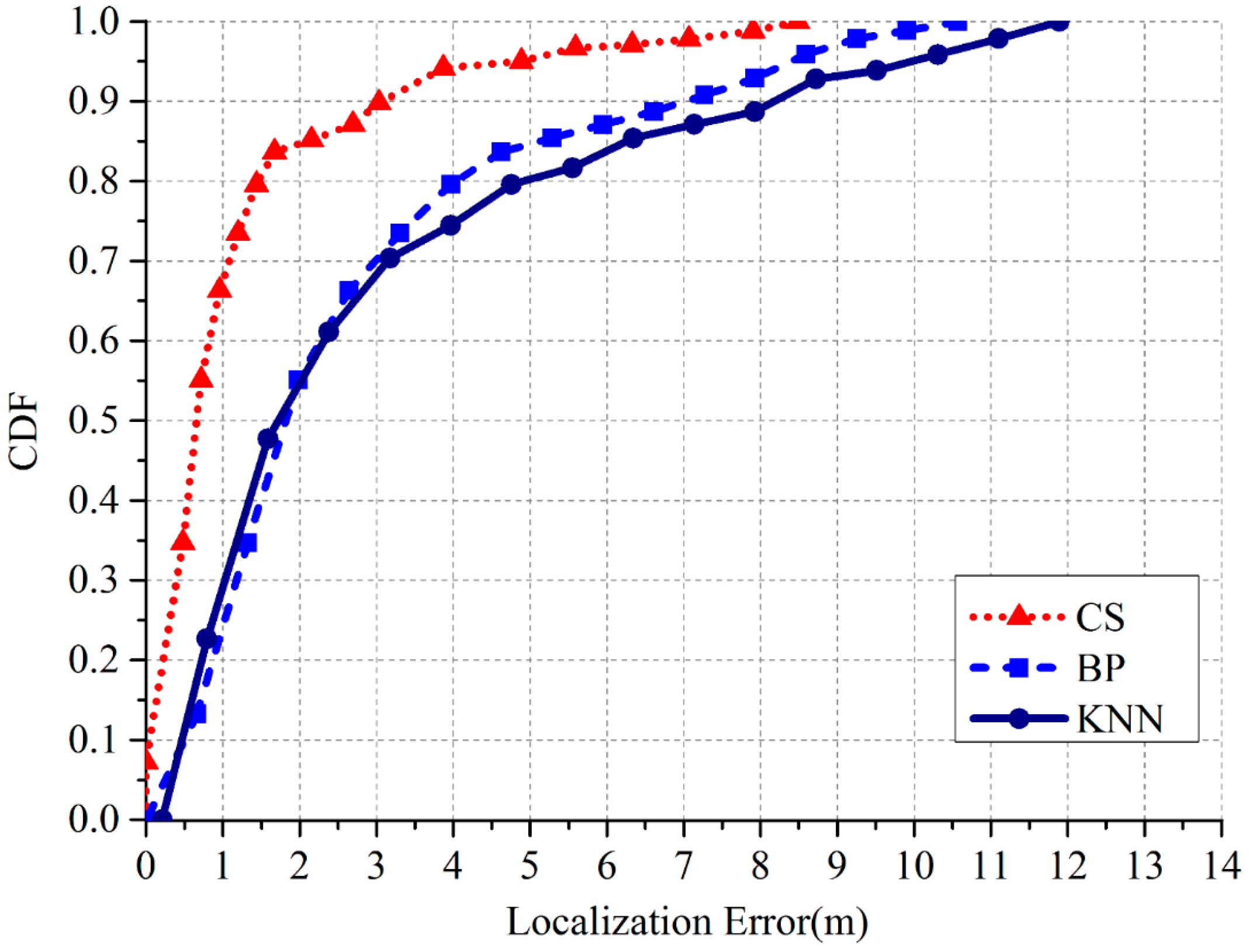
6.3. Performance Evaluation of the Online Stage
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Portugues, I.E.; Moore, P.J.; Glover, I.A.; Johnstone, C.; McKosky, R.H.; Goff, M.B.; van der Zel, L. RF-Based Partial Discharge Early Warning System for Air-Insulated Substations. IEEE Trans. Power Deliv. 2009, 24, 20–28. [Google Scholar] [CrossRef]
- Fresno, J.M.; Ardila-Rey, J.A.; Martínez-Tarifa, J.M.; Robles, G. Partial Discharges and Noise Separation using Spectral Power Ratios and Genetic Algorithms. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 31–38. [Google Scholar] [CrossRef]
- Li, C.R.; Ma, G.M.; Qi, B.; Zhang, G.J.; Su, Q. Condition monitoring and diagnosis of high-voltage equipment in china-recent progress. IEEE Electr. Insul. Mag. 2013, 29, 71–78. [Google Scholar] [CrossRef]
- Arefifar, S.A.; Mohamed, Y.A.R.I.; EL-Fouly, T.H. Comprehensive Operational Planning Framework for Self-Healing Control Actions in Smart Distribution Grids. IEEE Trans. Power Syst. 2013, 28, 4192–4200. [Google Scholar] [CrossRef]
- Yaacob, M.M.; Alsaedi, M.A.; Rashed, J.R.; Dakhil, A.M.; Atyah, S.F. Review on Partial Discharge Detection Techniques Related to High Voltage Power Equipment Using Different Sensors. Photon. Sens. 2014, 4, 325–337. [Google Scholar] [CrossRef]
- Boya, C.; Rojas-Moreno, M.V.; Ruiz-Llata, M.; Robles, G. Location of Partial Discharges Sources by Means of Blind Source Separation of UHF Signals. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 2302–2310. [Google Scholar] [CrossRef]
- Ardila-Rey, J.A.; Martinez-Tarifa, J.M.; Robles, G. Automatic Selection of Frequency Bands for the Power Ratios Separation Technique in Partial Discharge Measurements: Part II, PD Source Recognition and Applications. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 2293–2301. [Google Scholar] [CrossRef]
- Hara, S.; Anzai, D.; Yabu, T.; Lee, K.; Derham, T.; Zemek, R. A Perturbation Analysis on the Performance of TOA and TDOA Localization in Mixed LOS/NLOS Environments. IEEE Trans. Commun. 2013, 61, 679–689. [Google Scholar] [CrossRef]
- Do, J.Y.; Rabinowitz, M.; Enge, P. Robustness of TOA and TDOA Positioning Under Suboptimal Weighting Conditions. IEEE Trans. Aerosp. Electr. Syst. 2007, 43, 1177–1180. [Google Scholar]
- Hou, H.; Sheng, G.; Li, S.; Jiang, X. A Novel Algorithm for Separating Multiple PD Sources in a Substation Based on Spectrum Reconstruction of UHF Signals. IEEE Trans. Power Deliv. 2015, 30, 809–817. [Google Scholar] [CrossRef]
- Zhang, R.B.; Guo, J.G.; Chu, F.H.; Zhang, Y.C. Environmental-adaptive indoor radio path loss model for wireless sensor networks localization. AEU-Int. J. Electron. Commun. 2011, 65, 1023–1031. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. Distributed RSS-AoA Based Localization with Unknown Transmit Powers. IEEE Wirel. Commun. Lett. 2016, 5, 392–395. [Google Scholar] [CrossRef]
- Robles, G.; Sánchez-Fernández, M.; Sánchez, R.A.; Rojas-Moreno, M.V.; Rajo-Iglesias, E.; Martínez-Tarifa, J.M. Antenna Parametrization for the Detection of Partial Discharges. IEEE Trans. Instrum. Meas. 2013, 62, 932–941. [Google Scholar] [CrossRef]
- Robles, G.; Fresno, J.M.; Martínez-Tarifa, J.M. Separation of radio-frequency sources and localization of partial discharges in noisy environments. Sensors 2015, 15, 9882–9898. [Google Scholar] [CrossRef] [PubMed]
- Hou, H.; Sheng, G.; Jiang, X. Robust Time Delay Estimation Method for Locating UHF Signals of Partial Discharge in Substation. IEEE Trans. Power Deliv. 2013, 28, 1960–1968. [Google Scholar]
- Chen, W.; Wang, W.; Li, Q.; Chang, Q.; Hou, H. A Crowd-Sourcing Indoor Localization Algorithm via Optical Camera on a Smartphone Assisted by Wi-Fi Fingerprint RSSI. Sensors 2016, 16, 410. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Cui, W.; Wang, B. A Robust Wireless Sensor Network Localization Algorithm in Mixed LOS/NLOS Scenario. Sensors 2015, 15, 23536–23553. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Upton, D.; Jaber, A.; Ahmed, H.; Saeed, B.; Mather, P.; Lazaridis, P.; Mopty, A.; Tachtatzis, C.; Atkinson, R.; et al. Radiometric Wireless Sensor Network Monitoring of Partial Discharge Sources in Electrical Substations. Int. J. Distrib. Sens. Netw. 2015, 11, 438302. [Google Scholar] [CrossRef]
- Iorkyase, E.T.; Tachtatzis, C.; Atkinson, R.C.; Glover, I.A. Localisation of partial discharge sources using radio fingerprinting technique. In Proceedings of the 2015 Loughborough Antennas Propagation Conference (LAPC), Leicestershire, UK, 2–3 November 2015. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the IEEE INFOCOM, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus Location Determination System. Wirel. Netw. 2008, 14, 357–374. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B. An Introduction to Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Romberg, J. Imaging via Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 14–20. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Near Optimal Signal Recovery from Random Projections: Universal Encoding Strategies. IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Frey, B.J.; Dueck, D. Clustering by Passing Messages between Data Points. Science 2007, 315, 972–976. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y. Theory of Compressive Sensing via l1 Minimization: A Non-Rip Analysis and Extensions. J. Oper. Res. Soc. China 2013, 1, 79–105. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Stable Signal Recovery from Incomplete and Inaccurate Measurements. Commun. Pure Appl. Math. 2006, 59, 410–412. [Google Scholar] [CrossRef]
- Candes, E.J. The restricted isometry property and its implications for compressed sensing. Comptes Rendus Math. 2008, 346, 592–598. [Google Scholar] [CrossRef]
- Baraniuk, R.G. Compressive sensing. IEEE Signal Process. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Baraniuk, R.G.; Davenport, M.A.; Devore, R.A.; Wakin, M.B. A Simple Proof of the Restricted Isometry Property for Random Matrices. Constr. Approx. 2008, 28, 253–263. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J. Sparsity and Incoherence in Compressive Sampling. Inverse Probl. 2007, 23, 969–985. [Google Scholar] [CrossRef]
- Tsaig, Y.; Donoho, D. Extenstion of compressed sensing. Signal Process. 2006, 86, 549–571. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S. Enhancing Sparsity by Reweighted l1 Minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Ray, A.; Sanghavi, S.; Shakkottai, S. Improved Greedy Algorithms for Learning Graphical Models. IEEE Trans. Inf. Theory 2015, 61, 3457–3468. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal Recovery from Random Measurements via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Needell, D.; Tropp, J.A. CoSaMP: Iterative signal recovery from incomplete and inaccurate samples. Appl. Comput. Harmonic Anal. 2009, 26, 301–321. [Google Scholar] [CrossRef]
- Varadarajan, B.; Khudanpur, S.; Tran, T.D. Stepwise Optimal Subspace Pursuit for Improving Sparse Recovery. IEEE Signal Process. Lett. 2011, 18, 27–30. [Google Scholar] [CrossRef]
- Wang, J.; Kwon, S.; Shim, B. Generalized Orthogonal Matching Pursuit. IEEE Trans. Signal Process. 2012, 60, 6202–6216. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | w | λ | tmax | tcon |
|---|---|---|---|---|
| Values | −1.56 | 0.9 | 1000 | 100 |
| Parameters | CS | BP | KNN |
|---|---|---|---|
| Average error (m) | 1.25 | 2.51 | 2.63 |
| The proportion of the errors within 1 m | 68.3% | 24.2% | 27.0% |
| The proportion of the errors within 3 m | 89.6% | 70.2% | 68.1% |
| The proportion of the errors within 5 m | 95.2% | 85.0% | 80.2% |
| The maximum error (m) | 8.49 | 10.57 | 11.89 |
| Parameters | Under Clustering I Process | Without Clustering I Process |
|---|---|---|
| Average error (m) | 1.25 | 2.07 |
| The proportion of the errors within 1 m | 68.3% | 37.3% |
| The proportion of the errors within 3 m | 89.6% | 77.9% |
| The proportion of the errors within 5 m | 95.2% | 88.8% |
| The maximum error (m) | 8.49 | 10.25 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Luo, L.; Zhou, N.; Sheng, G.; Jiang, X. A Novel Partial Discharge Localization Method in Substation Based on a Wireless UHF Sensor Array. Sensors 2017, 17, 1909. https://doi.org/10.3390/s17081909
Li Z, Luo L, Zhou N, Sheng G, Jiang X. A Novel Partial Discharge Localization Method in Substation Based on a Wireless UHF Sensor Array. Sensors. 2017; 17(8):1909. https://doi.org/10.3390/s17081909
Chicago/Turabian StyleLi, Zhen, Lingen Luo, Nan Zhou, Gehao Sheng, and Xiuchen Jiang. 2017. "A Novel Partial Discharge Localization Method in Substation Based on a Wireless UHF Sensor Array" Sensors 17, no. 8: 1909. https://doi.org/10.3390/s17081909
APA StyleLi, Z., Luo, L., Zhou, N., Sheng, G., & Jiang, X. (2017). A Novel Partial Discharge Localization Method in Substation Based on a Wireless UHF Sensor Array. Sensors, 17(8), 1909. https://doi.org/10.3390/s17081909