Towards Scalable Strain Gauge-Based Joint Torque Sensors

 ,
, 
 ,
,
Abstract
:1. Introduction
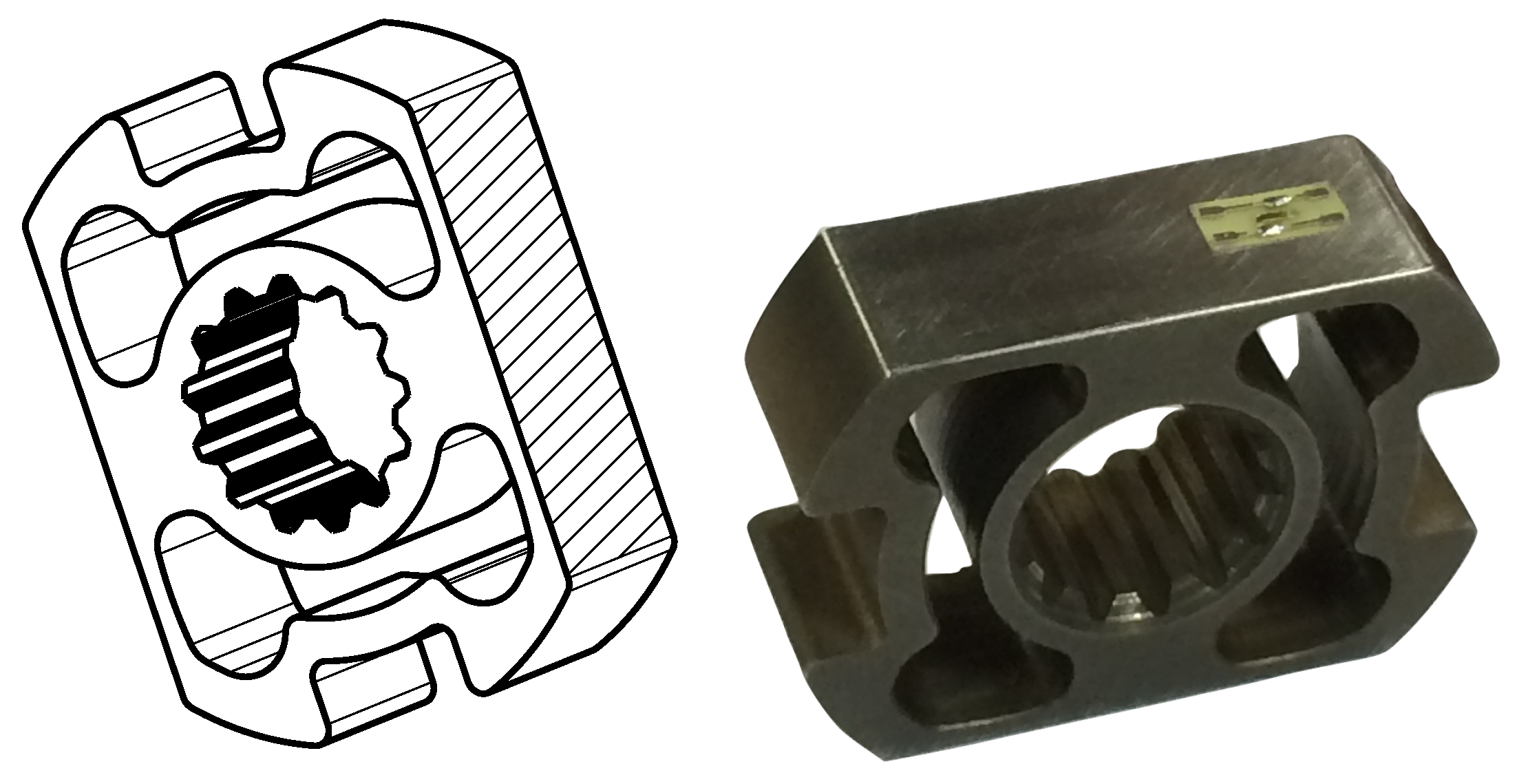
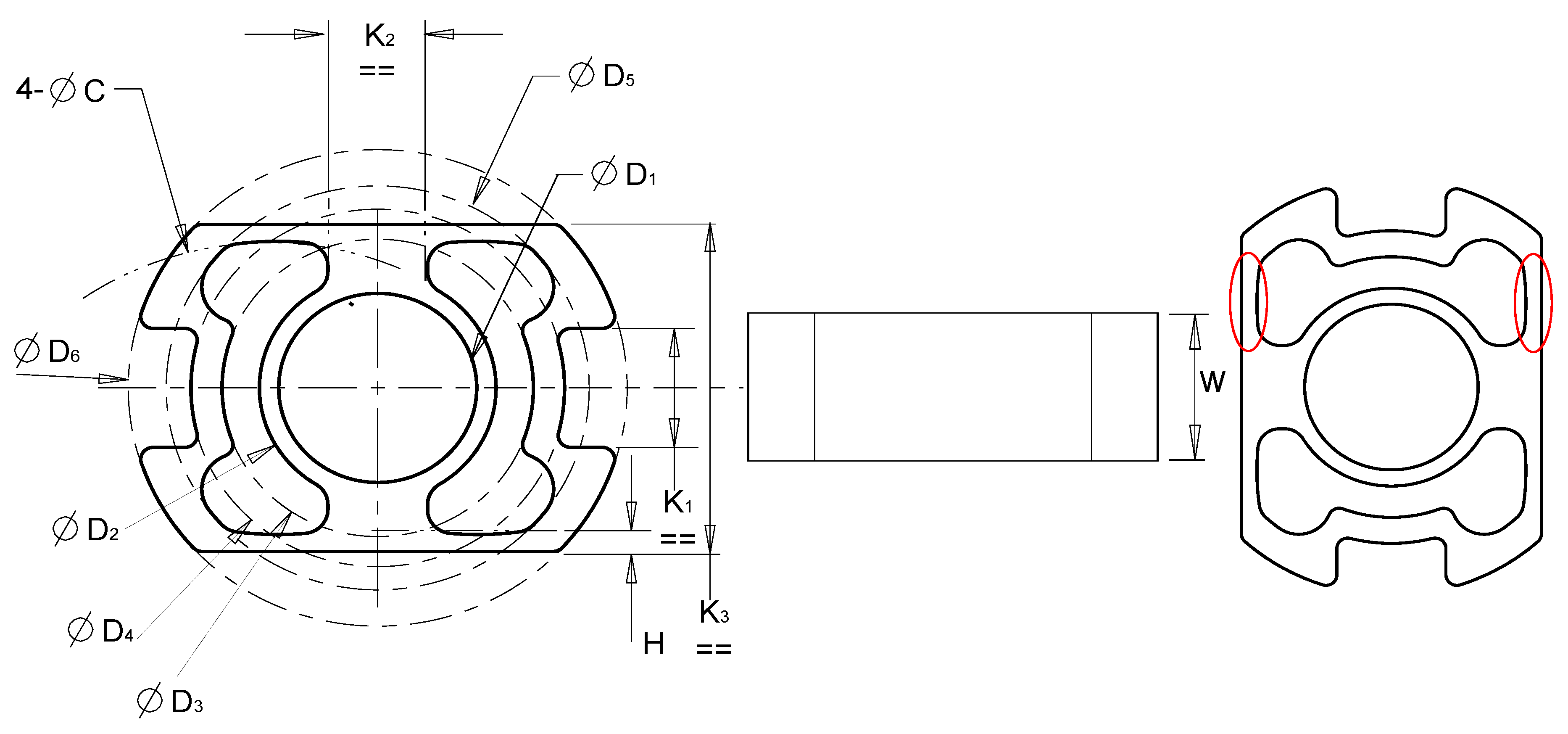
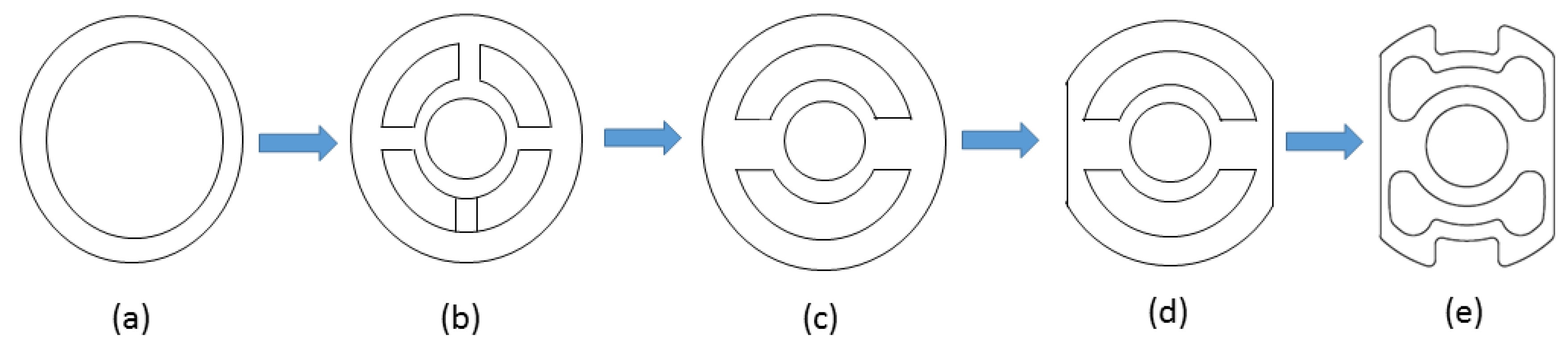
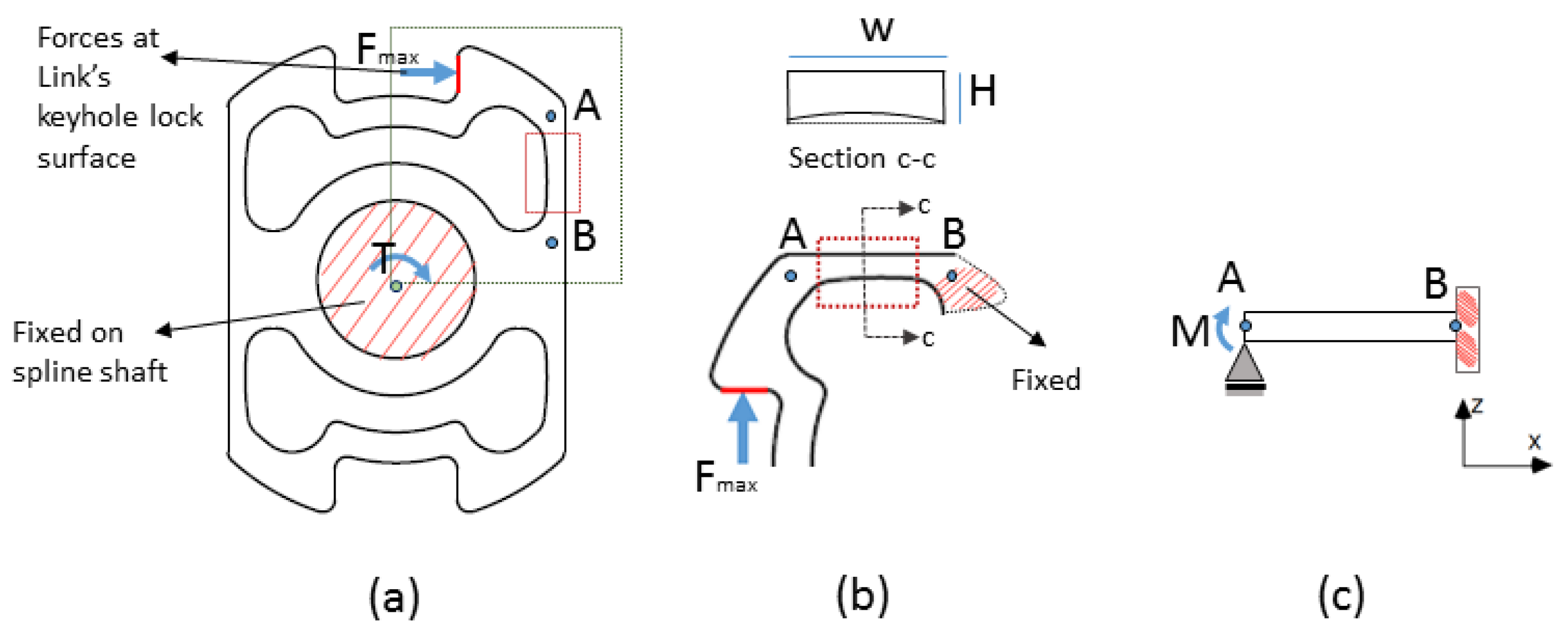
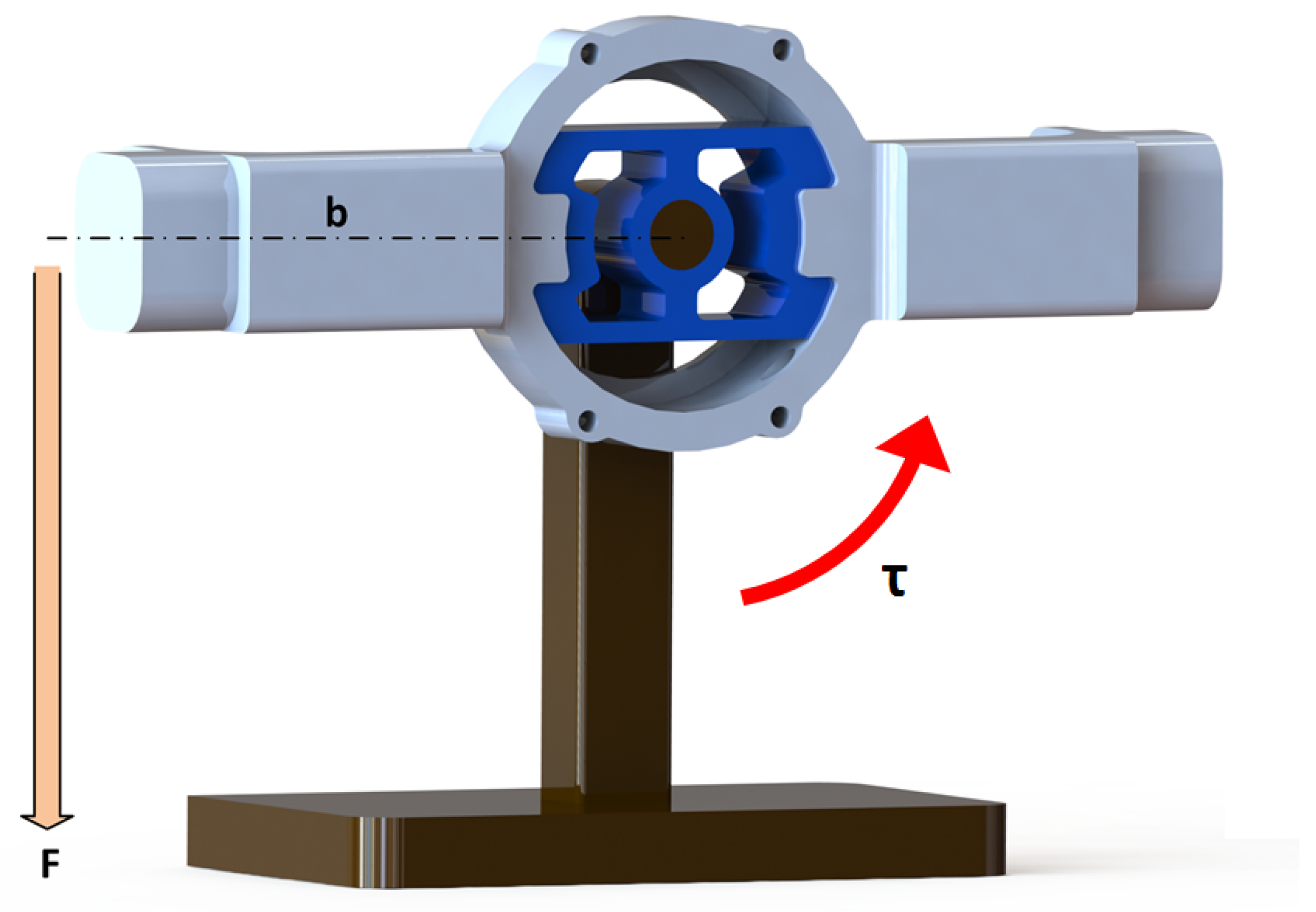
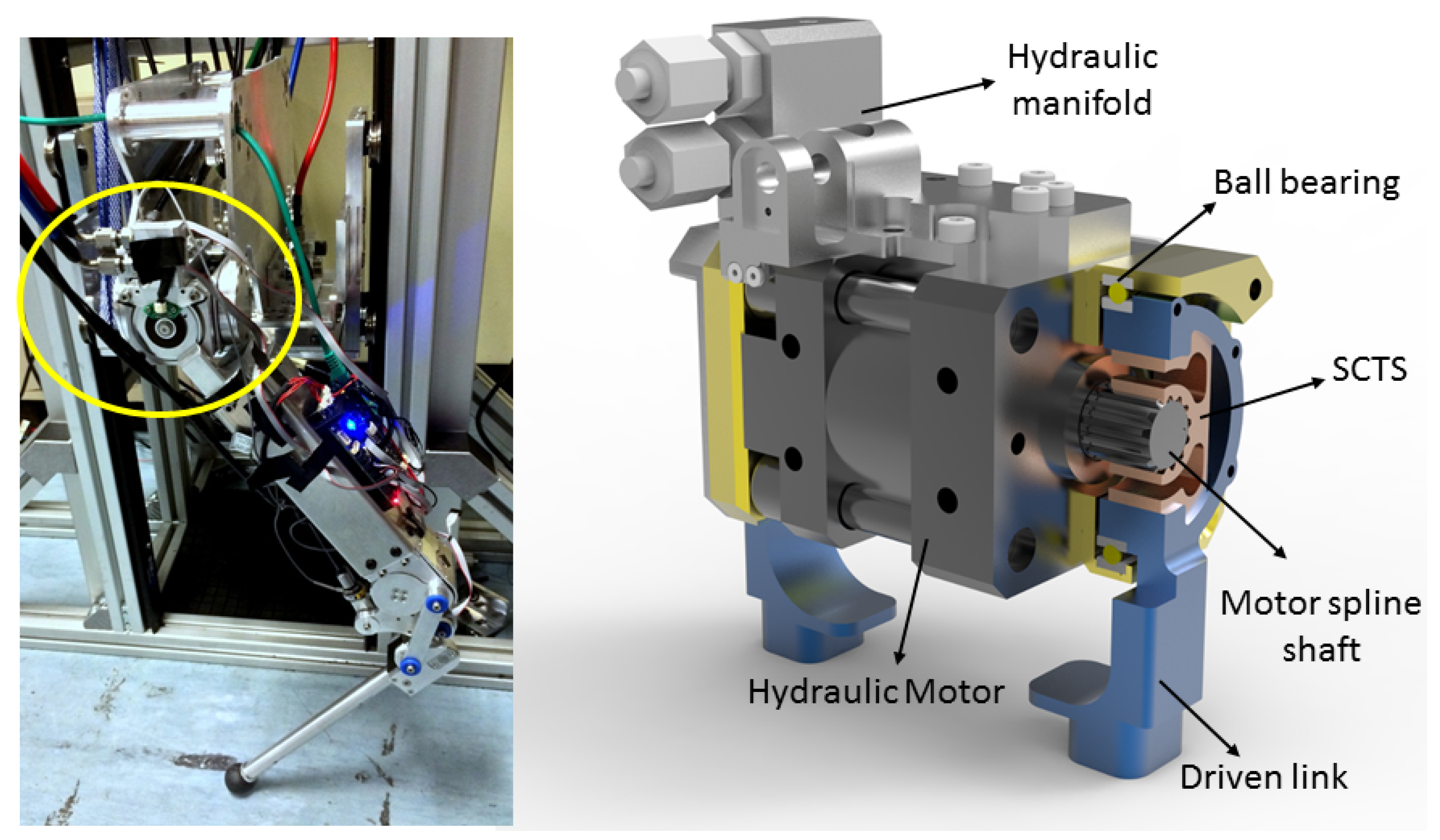
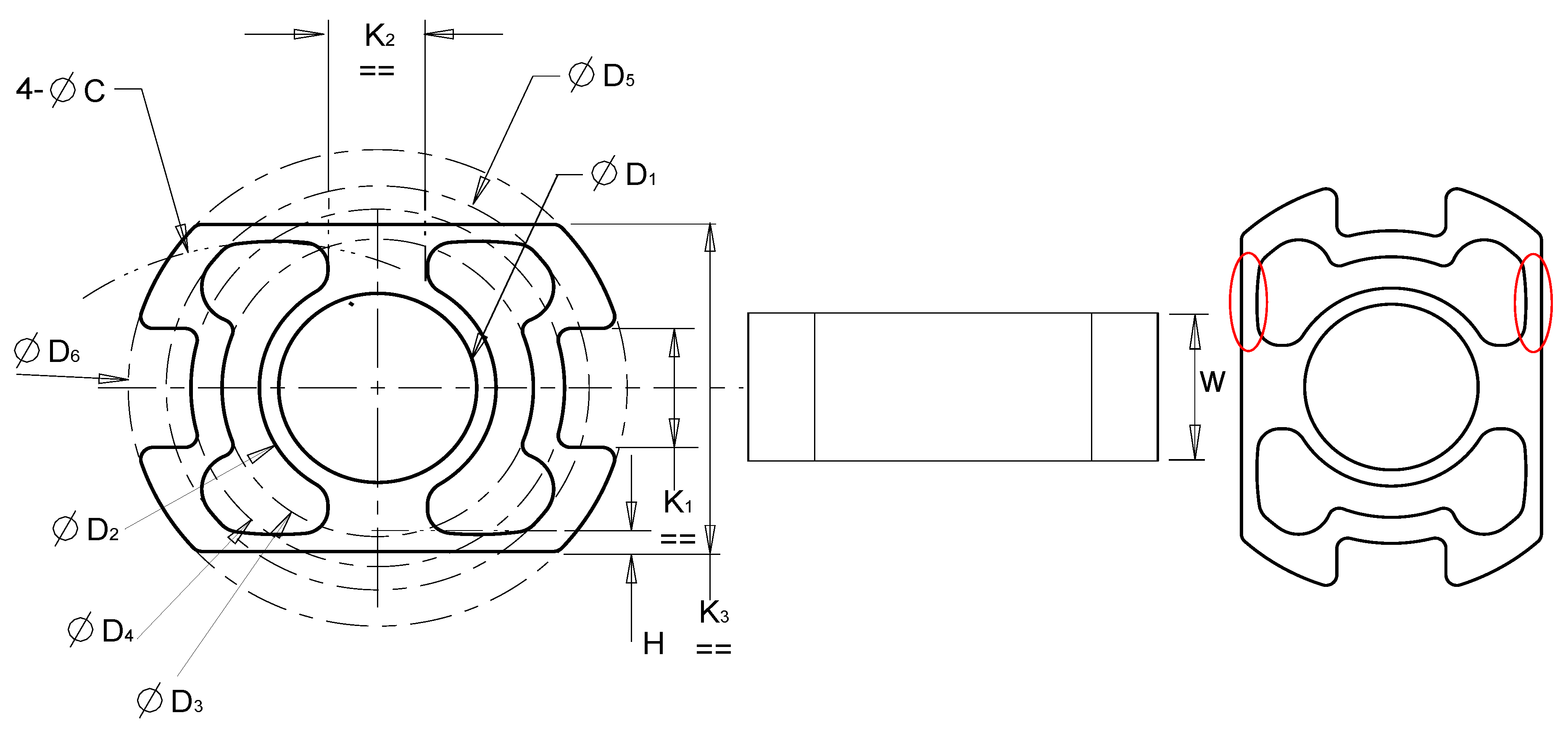
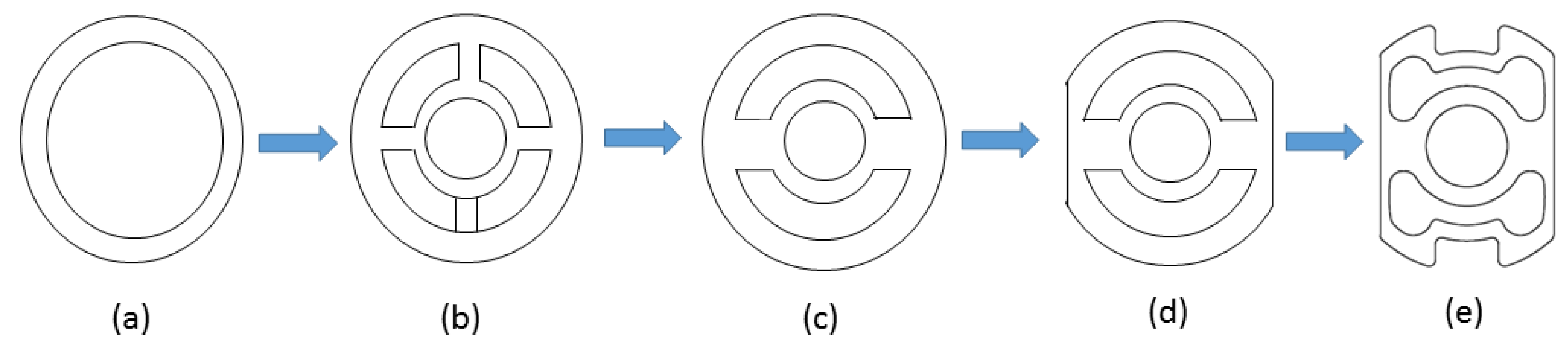
2. Torque Sensor Design
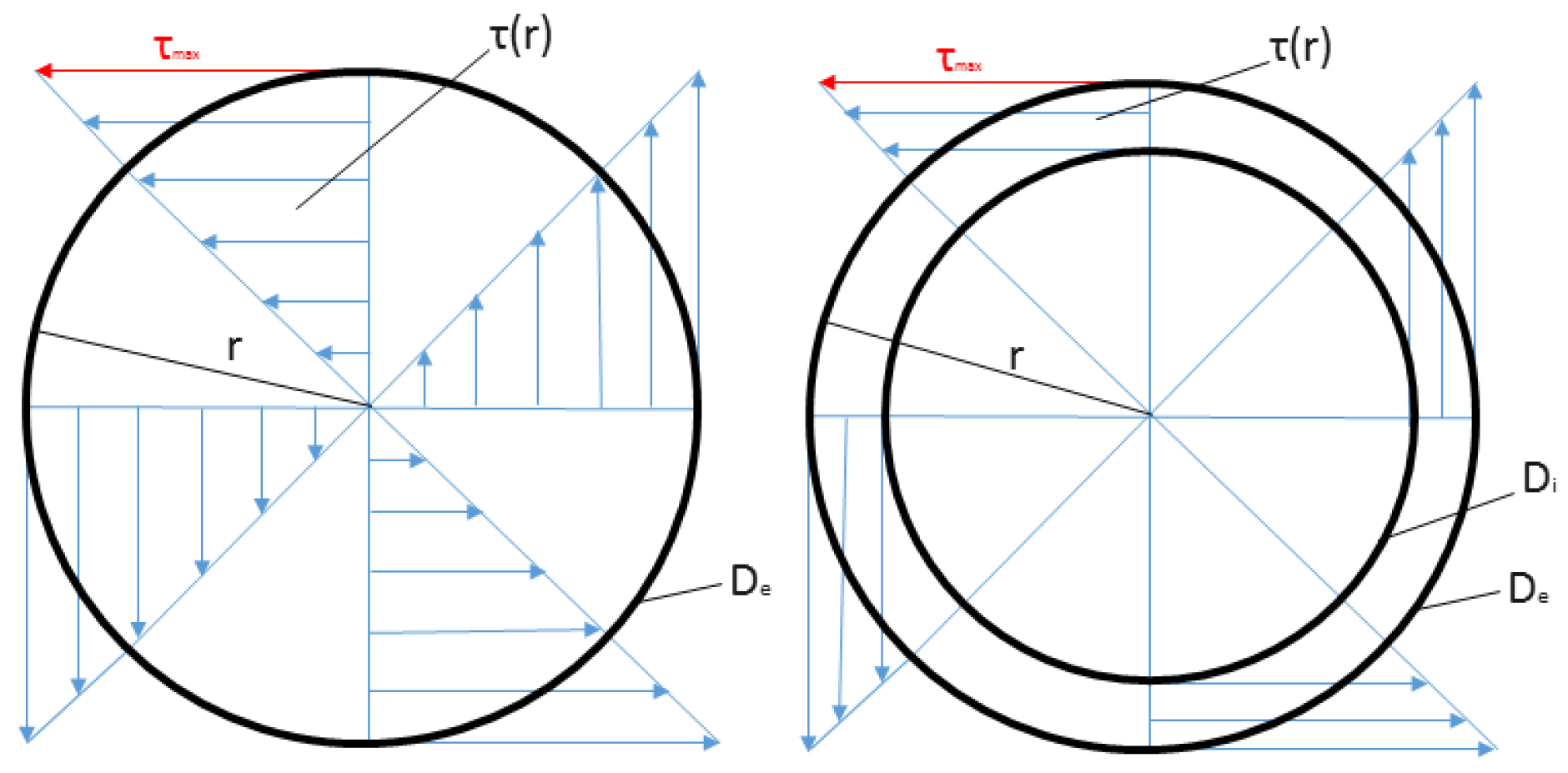
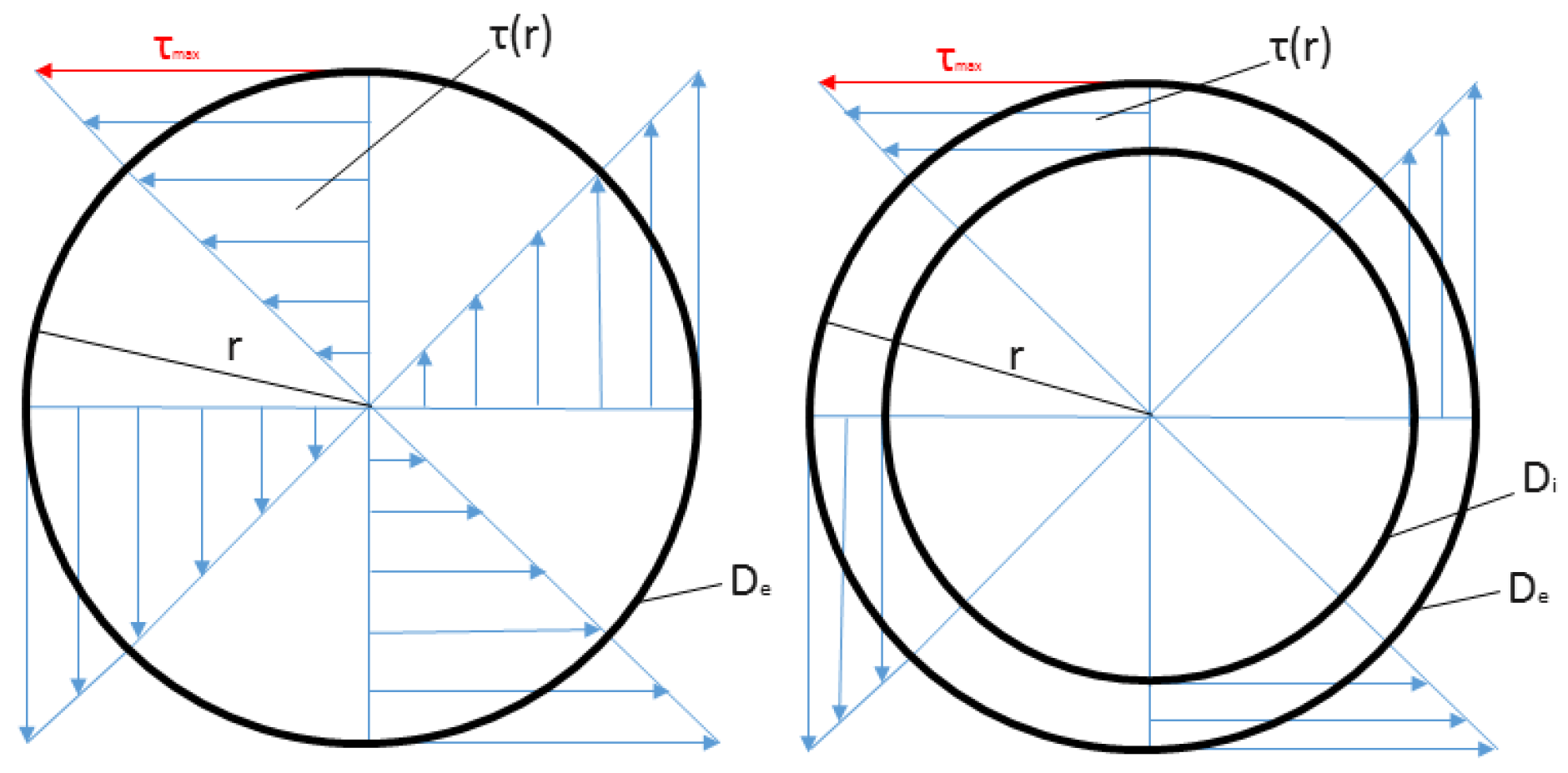
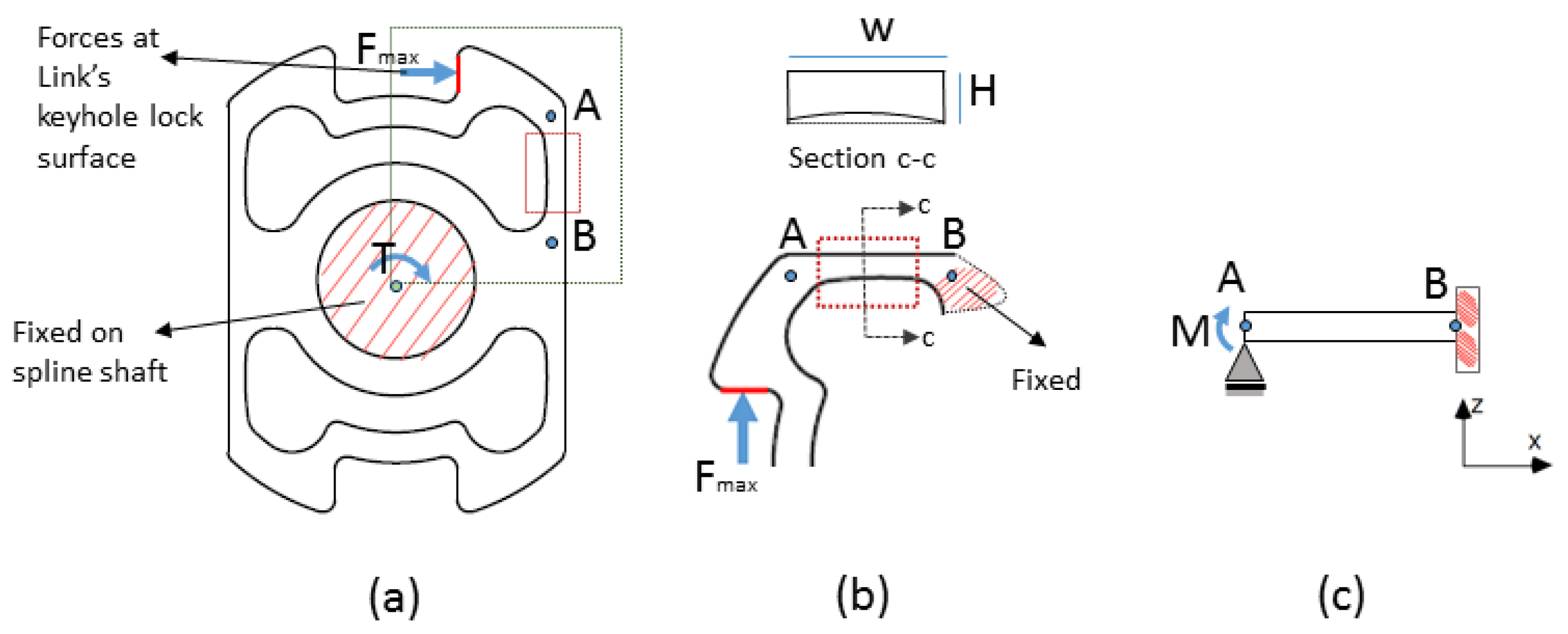
3. Analytical Model
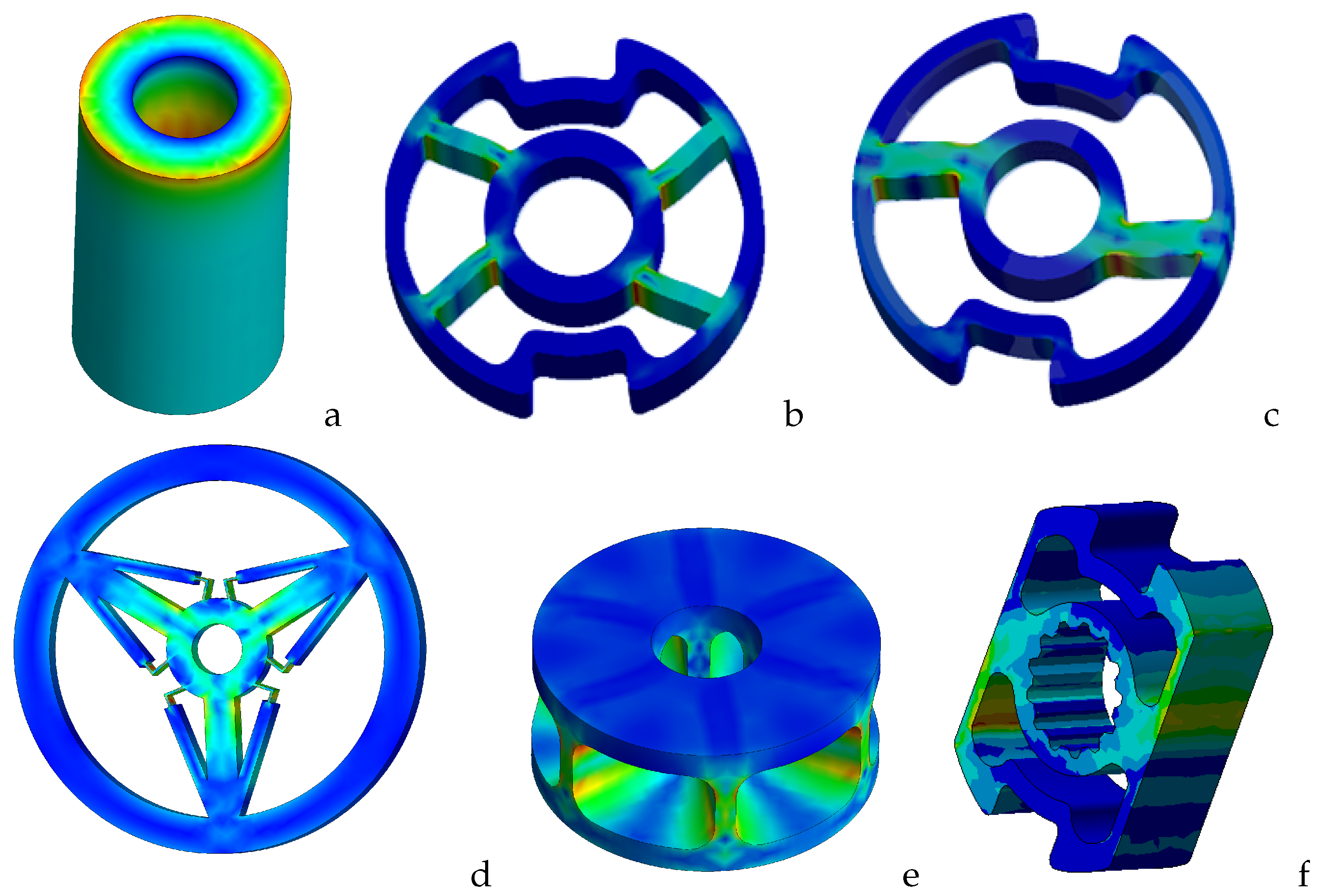
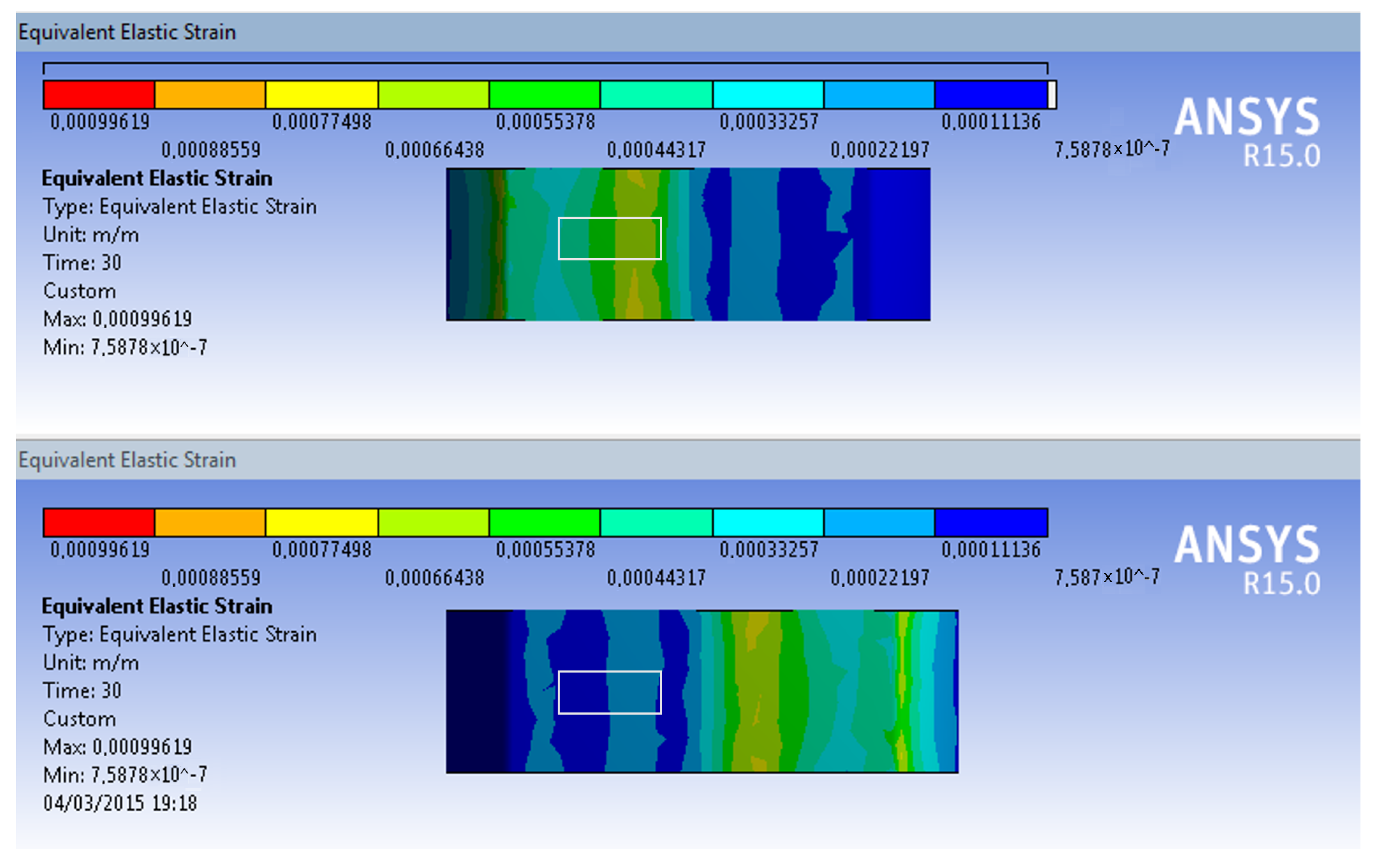
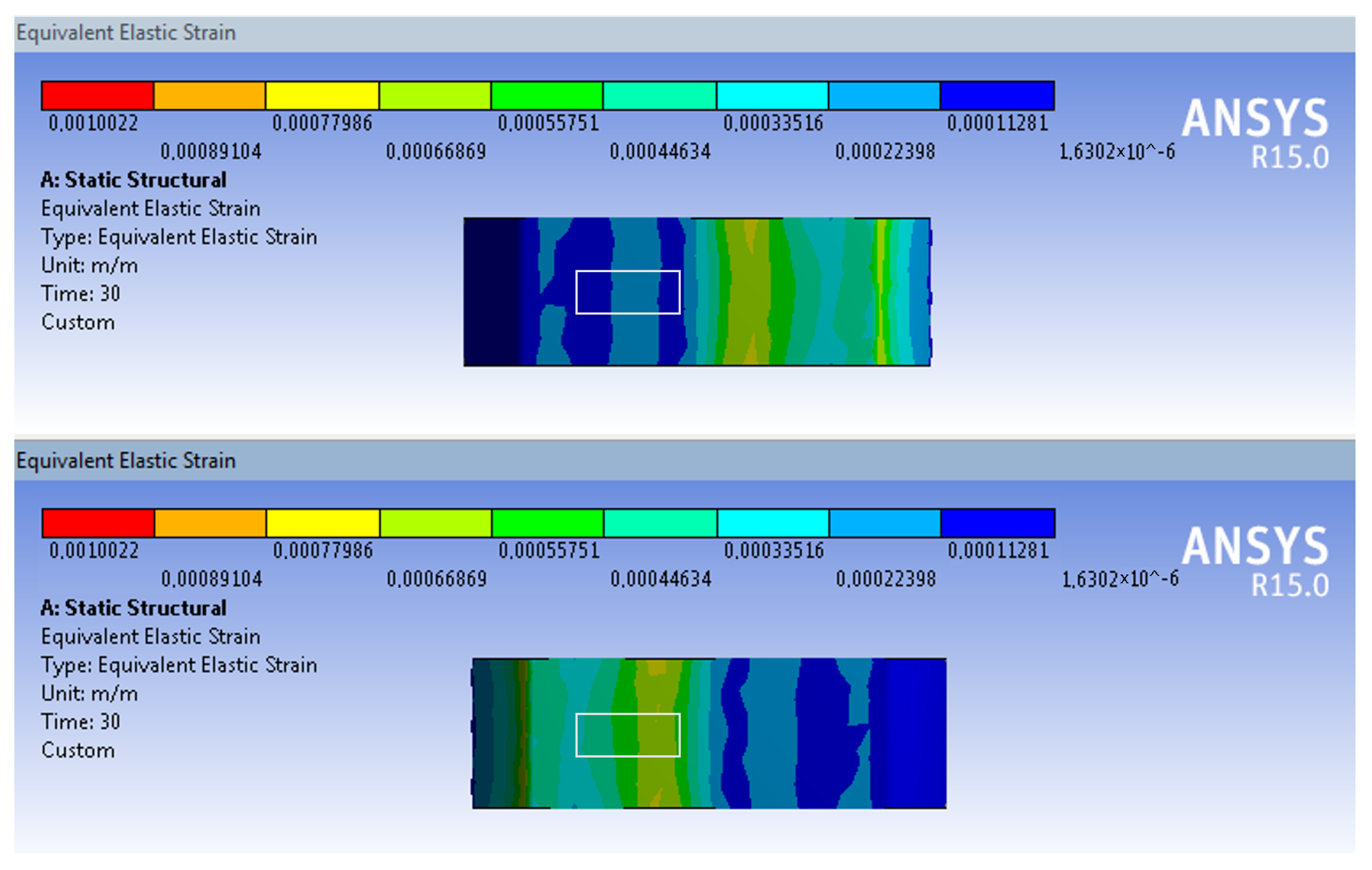
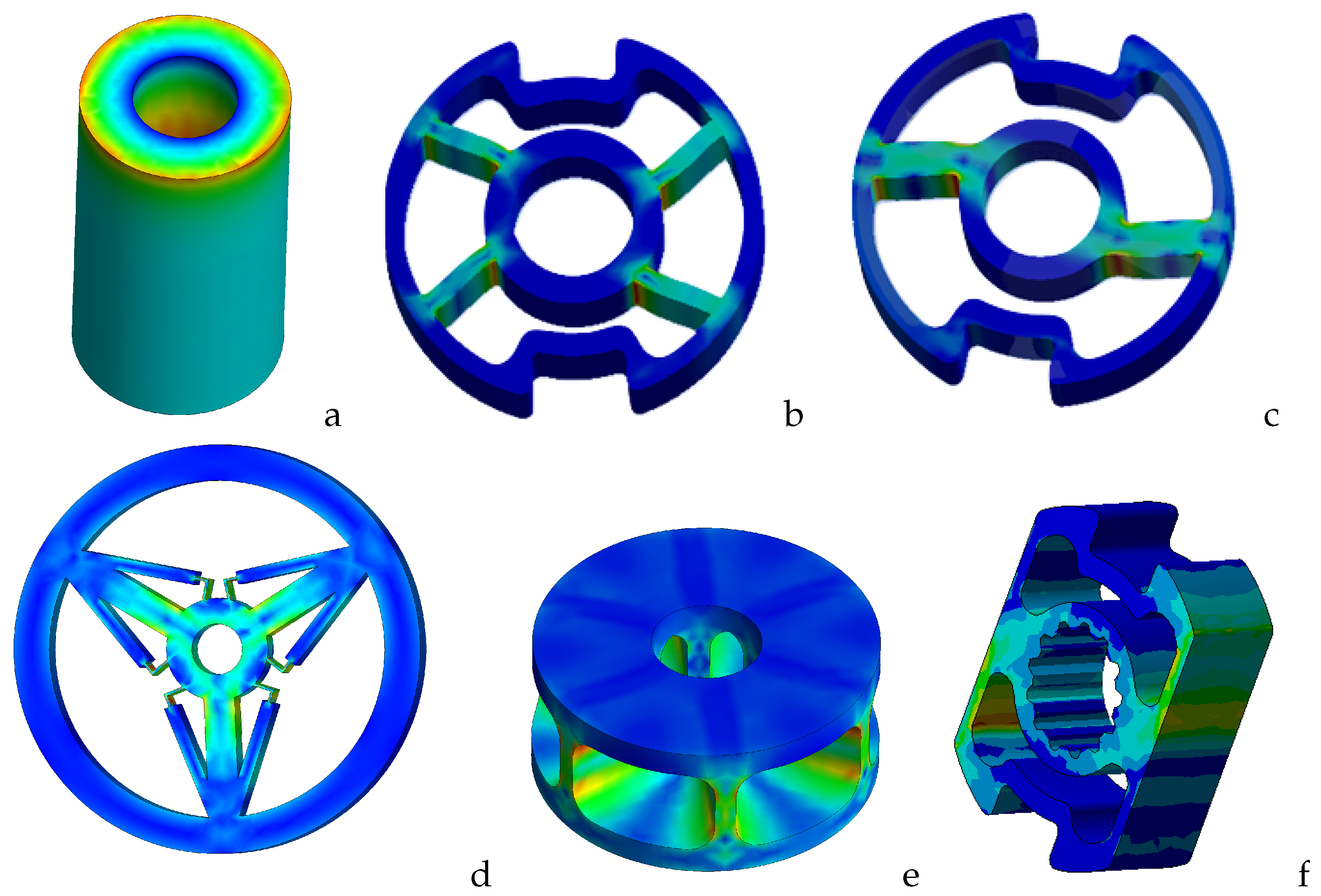
4. Simulations and Analysis
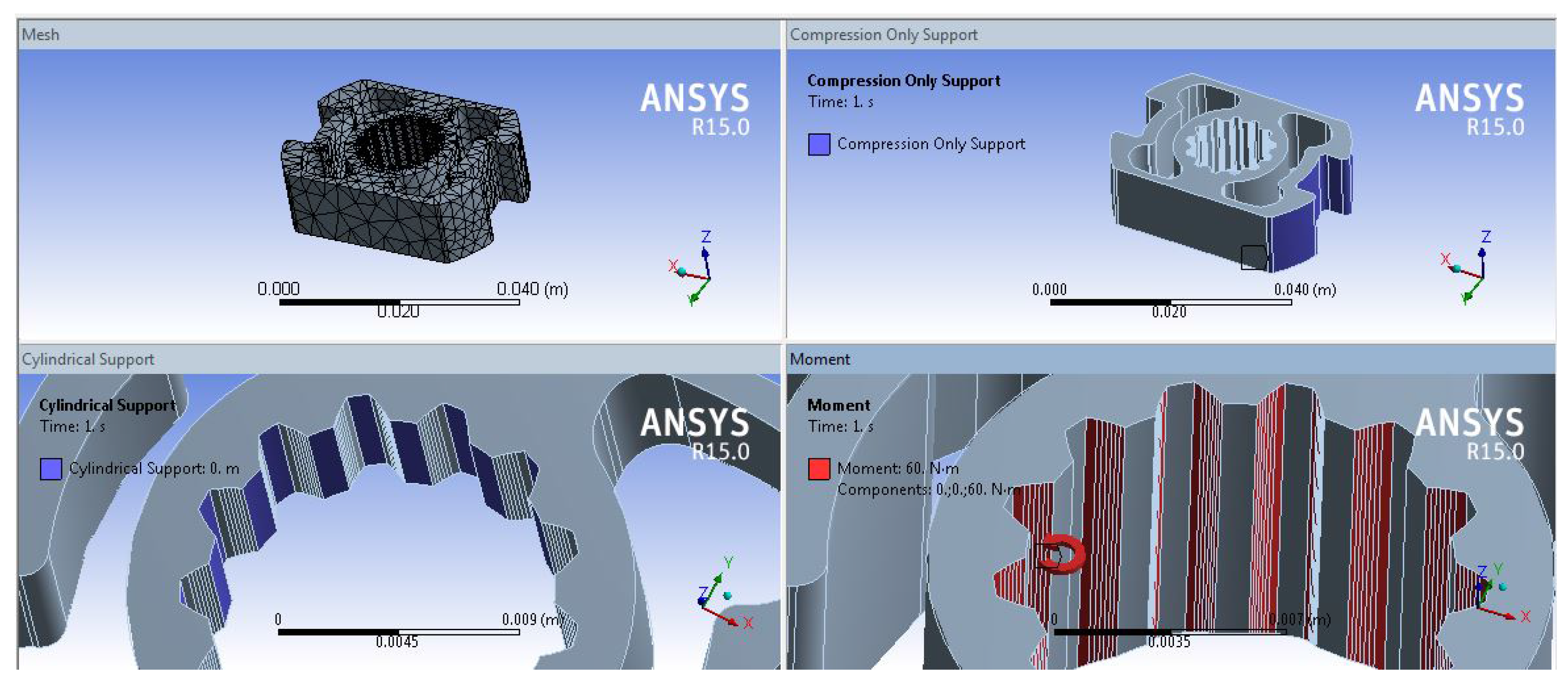
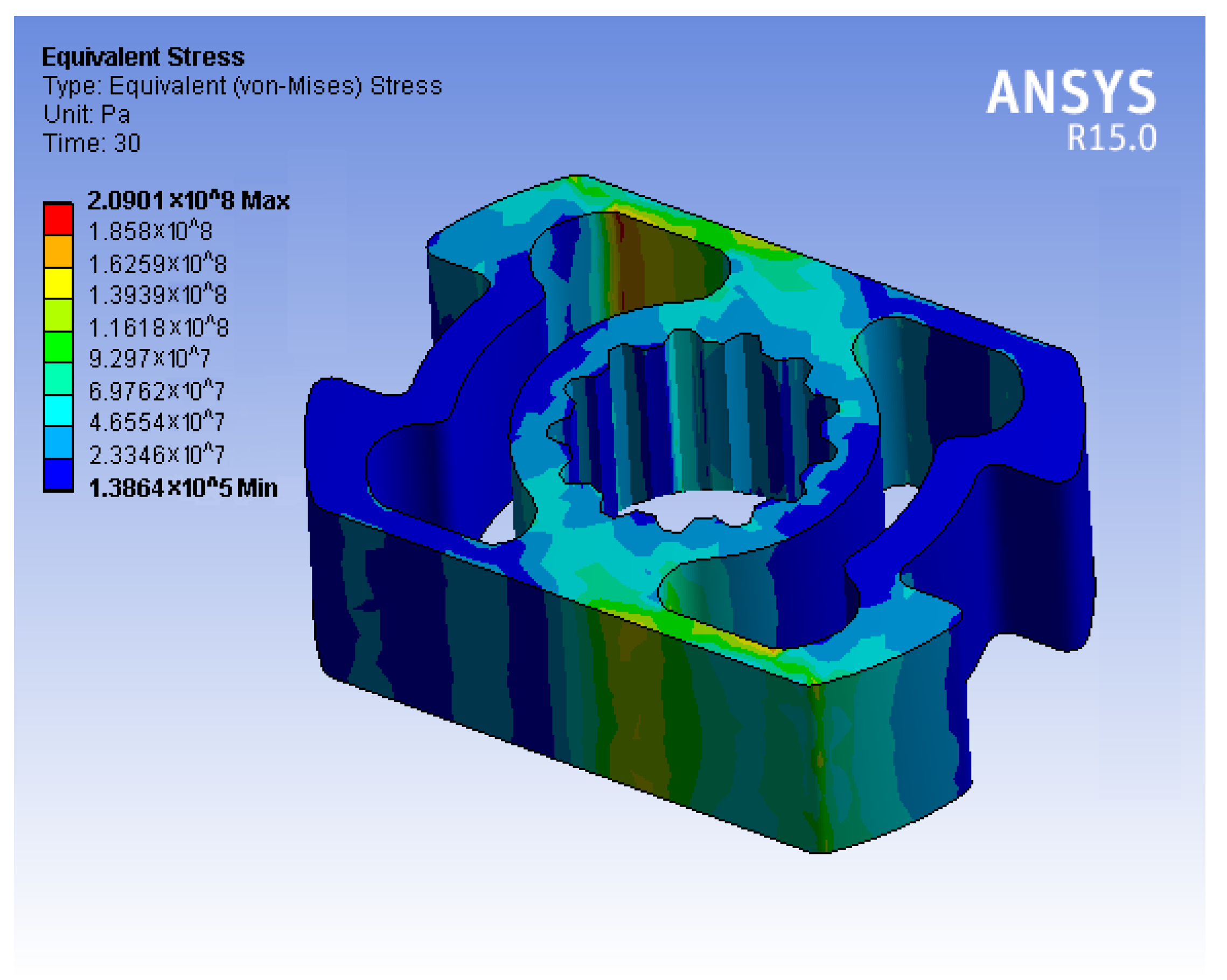
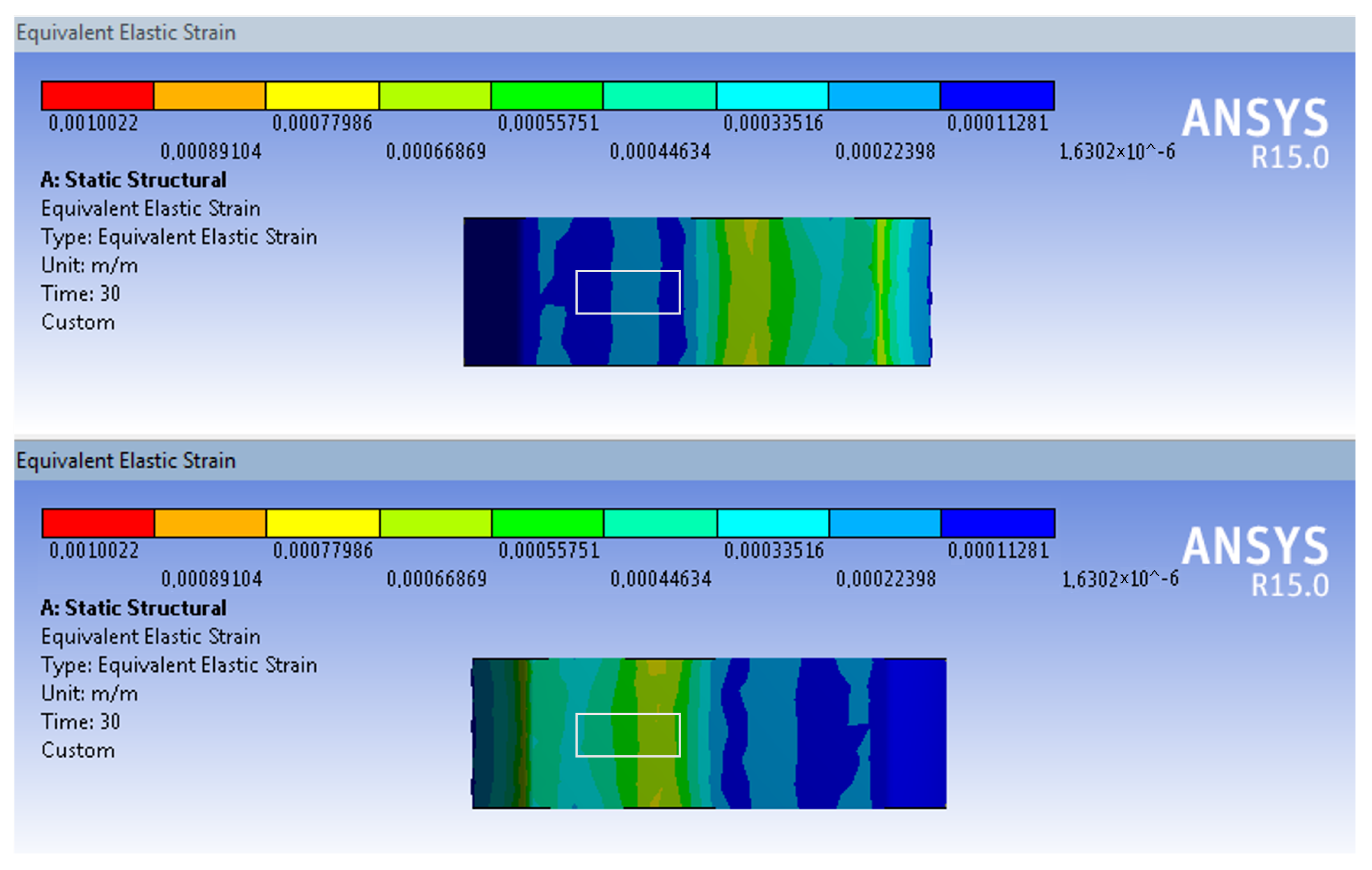
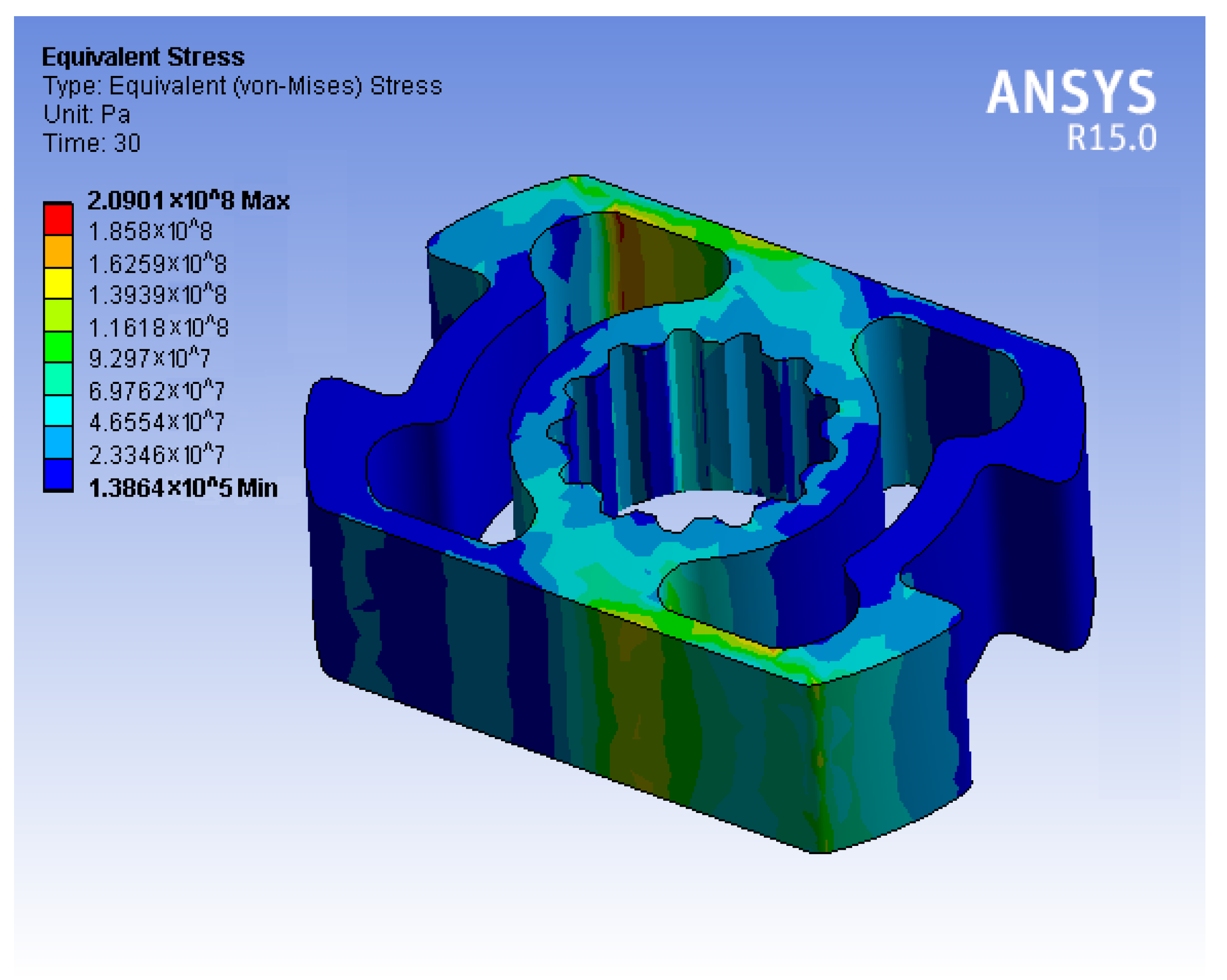
4.1. Numerical Model
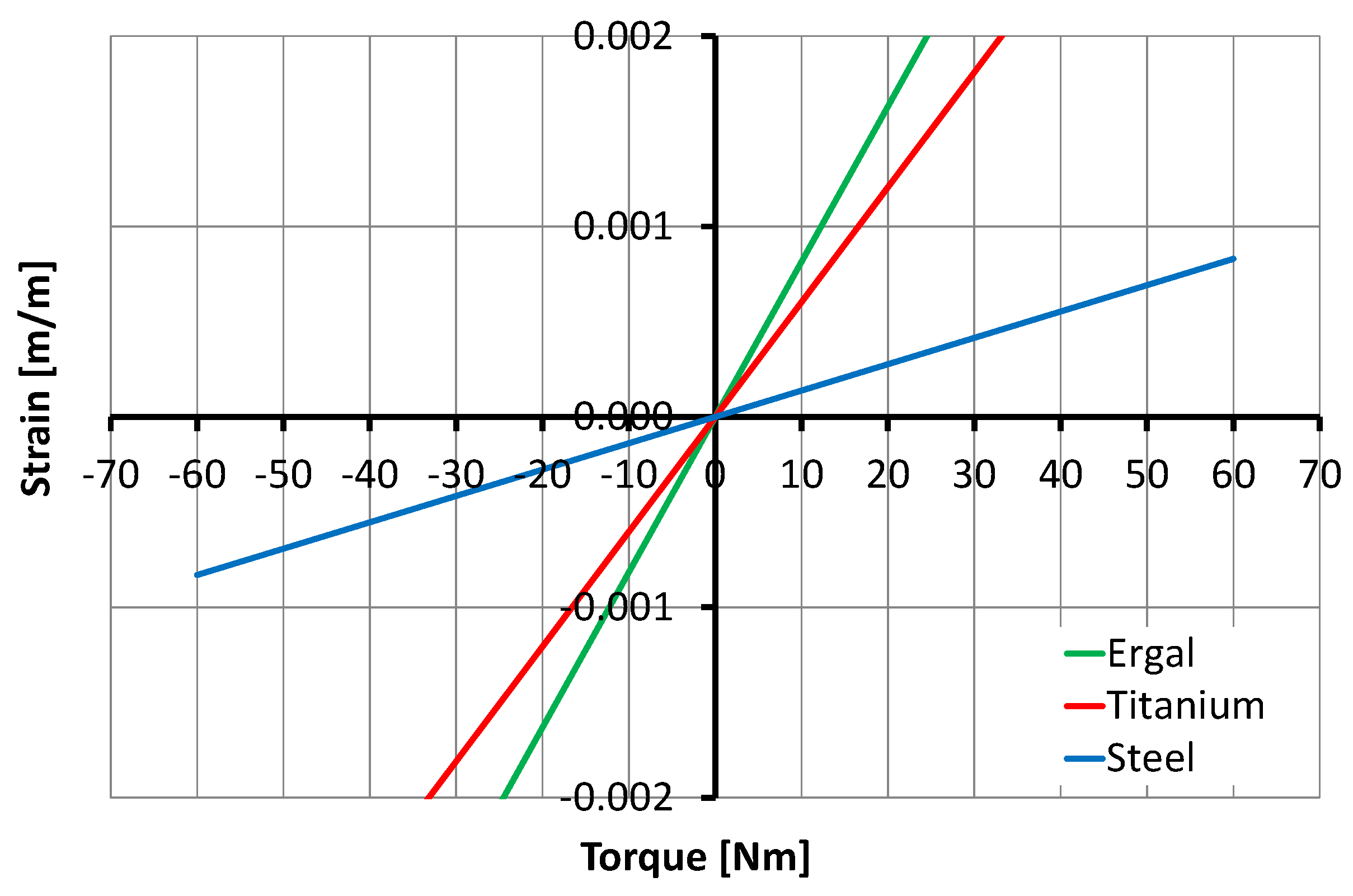
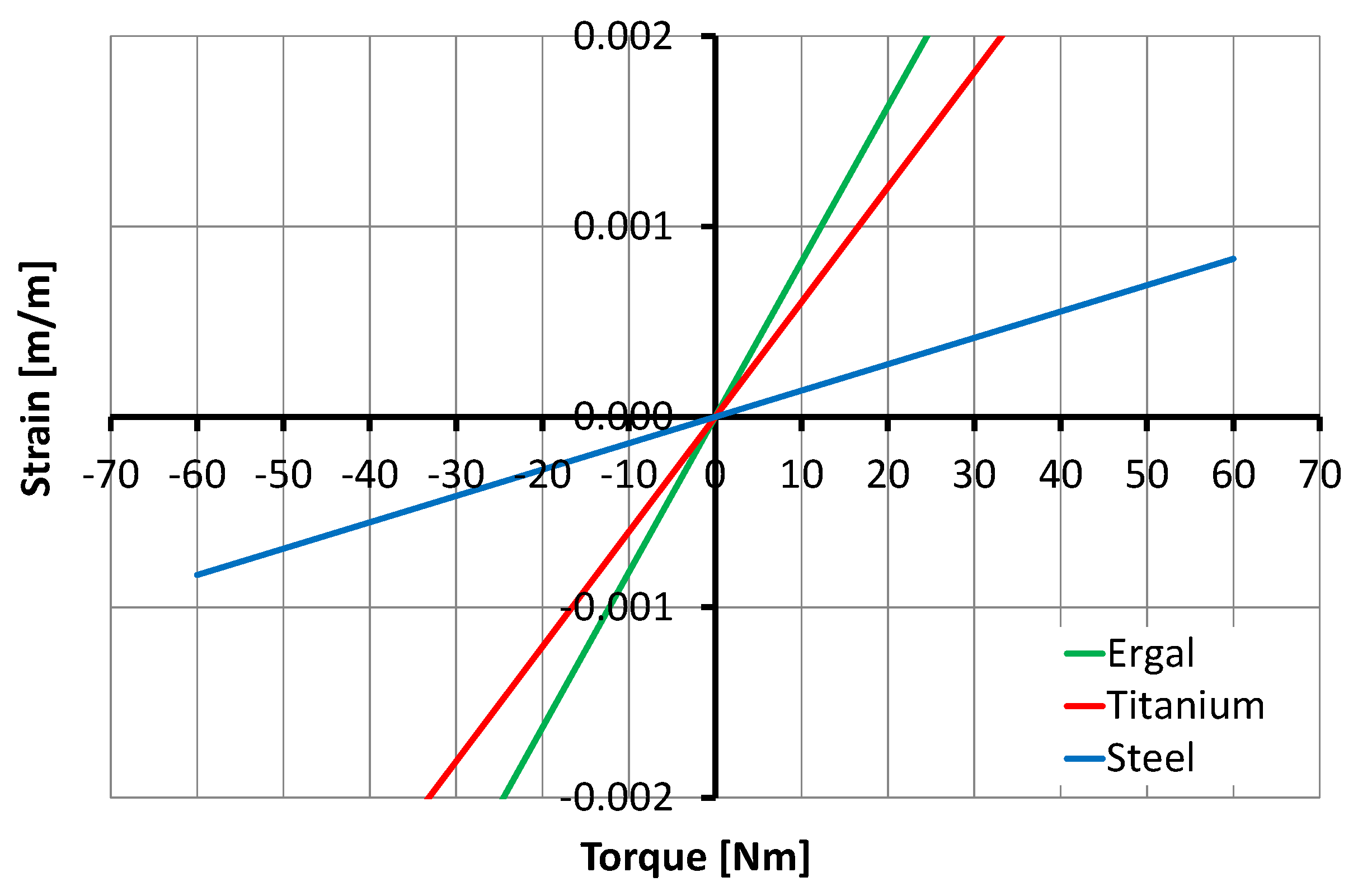
4.2. Effects of Material
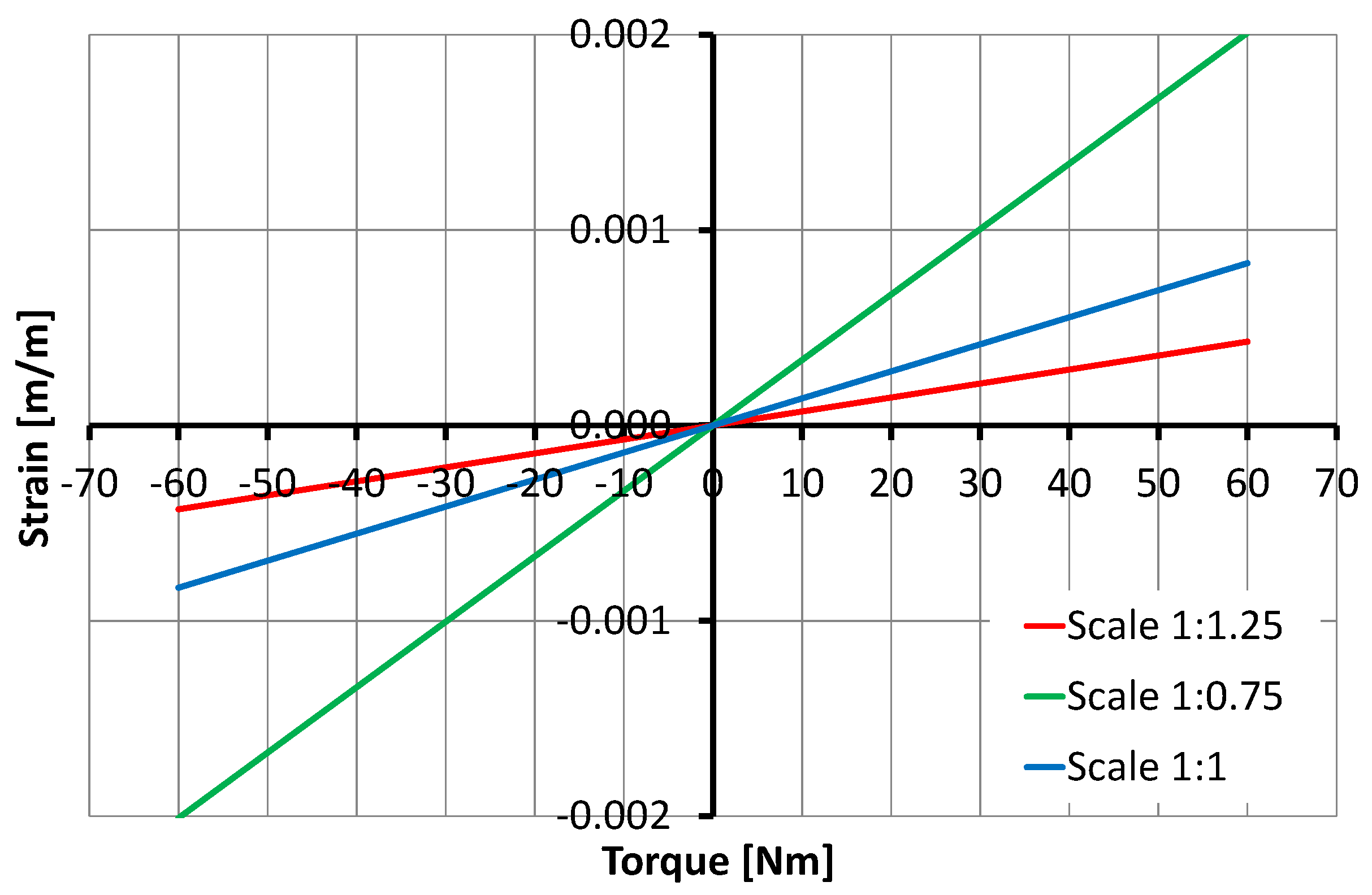
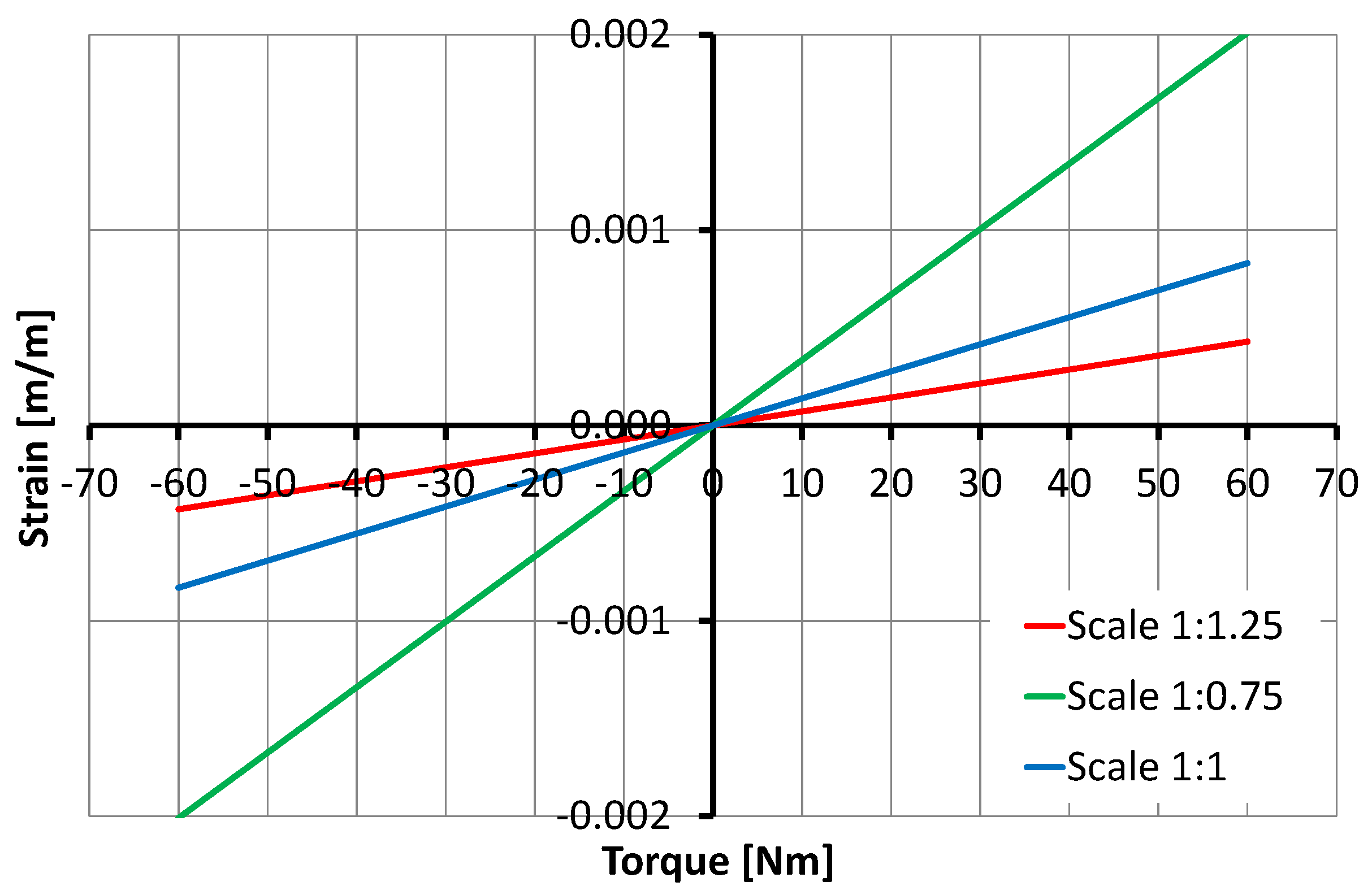
4.3. Effects of Scaling
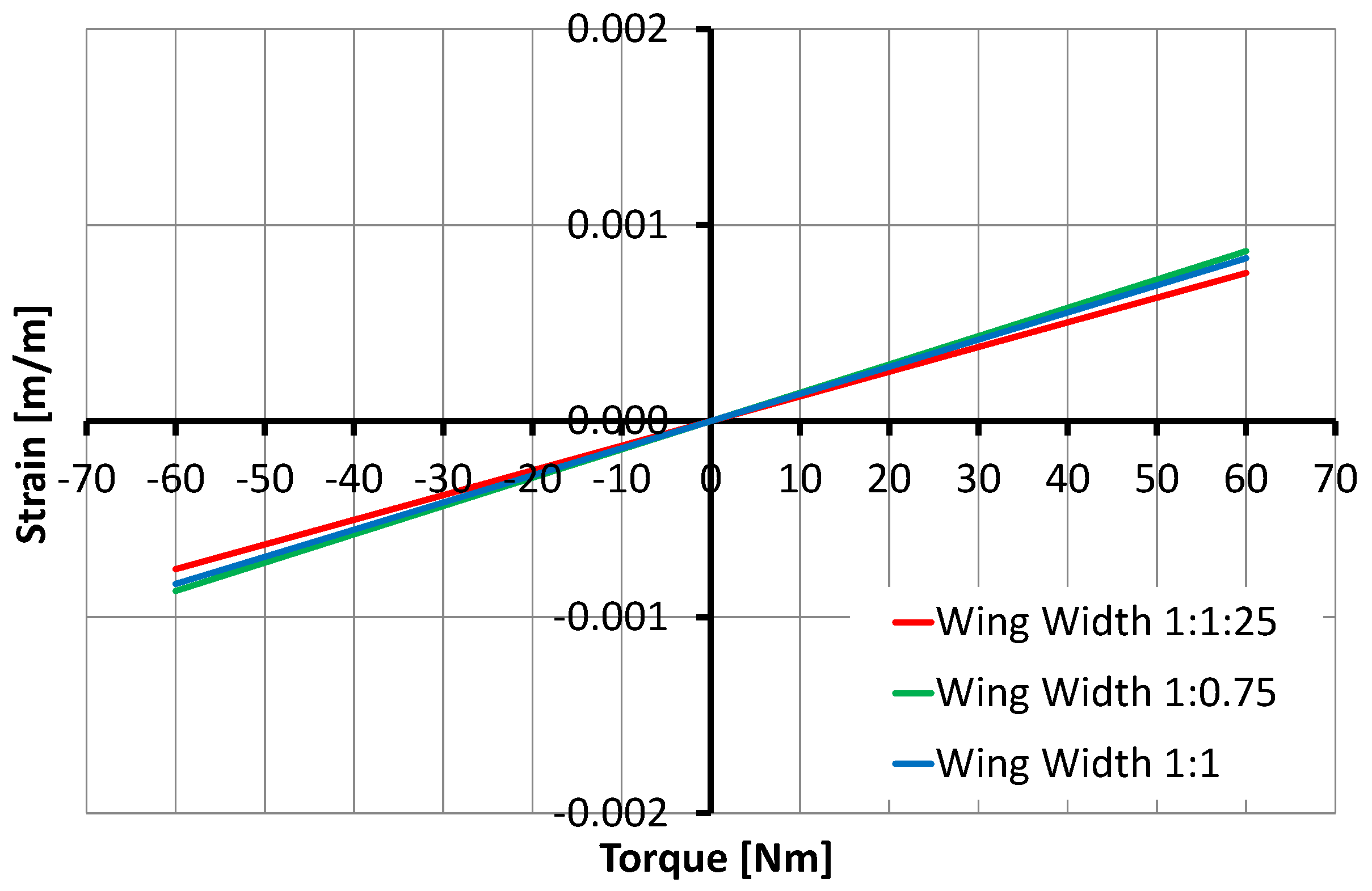
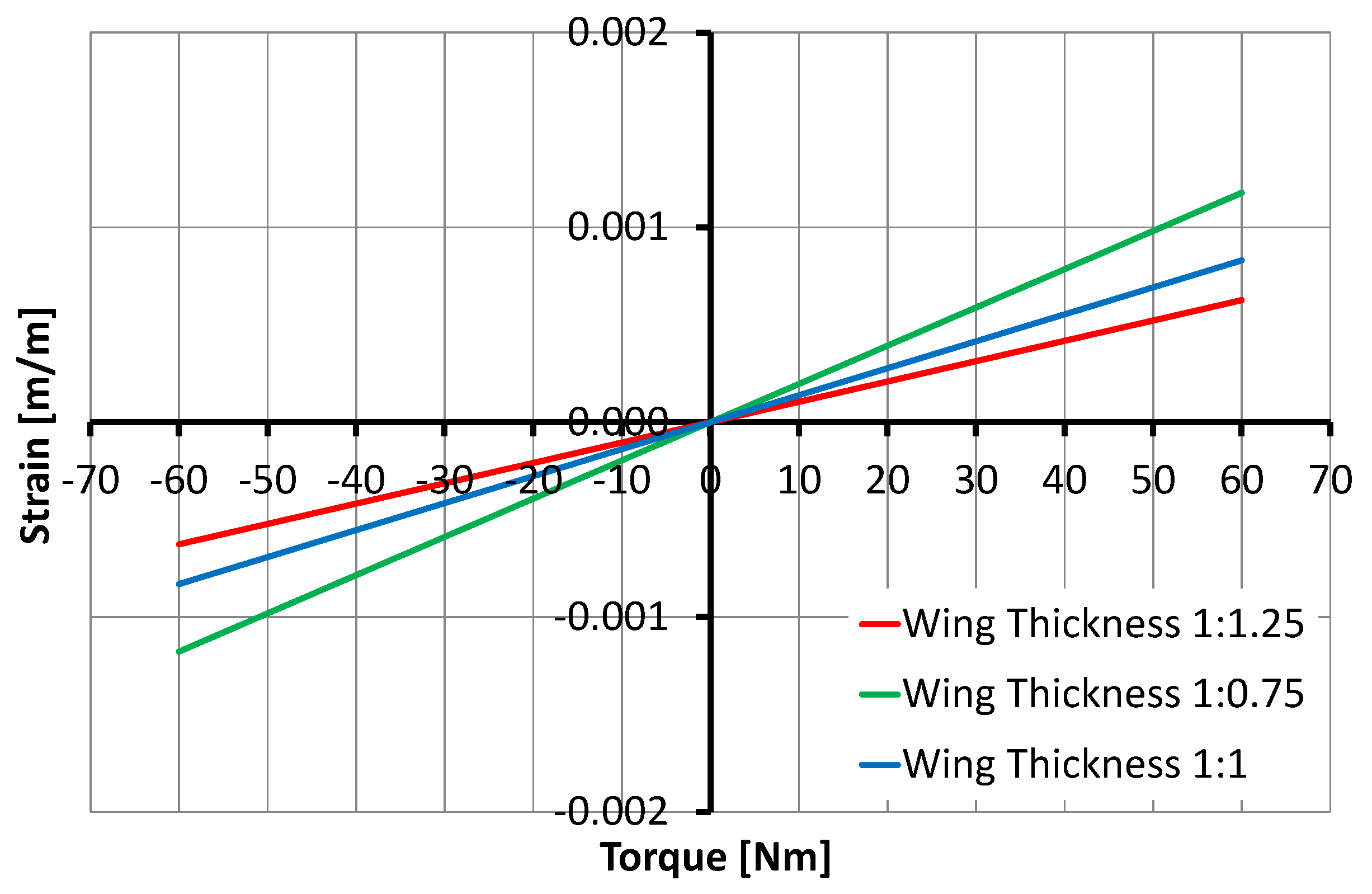
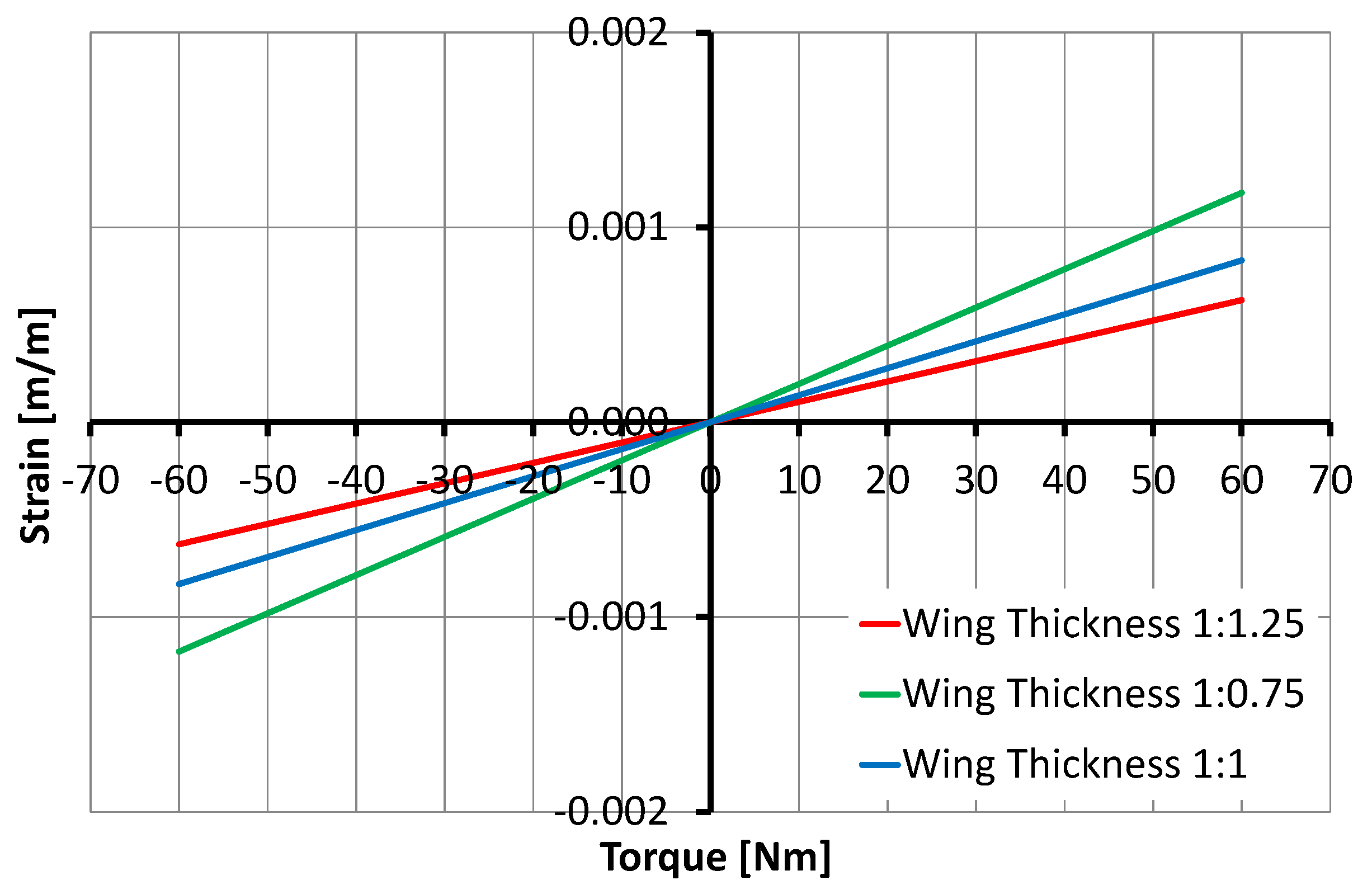
4.4. Effects of Wing Width and Thickness
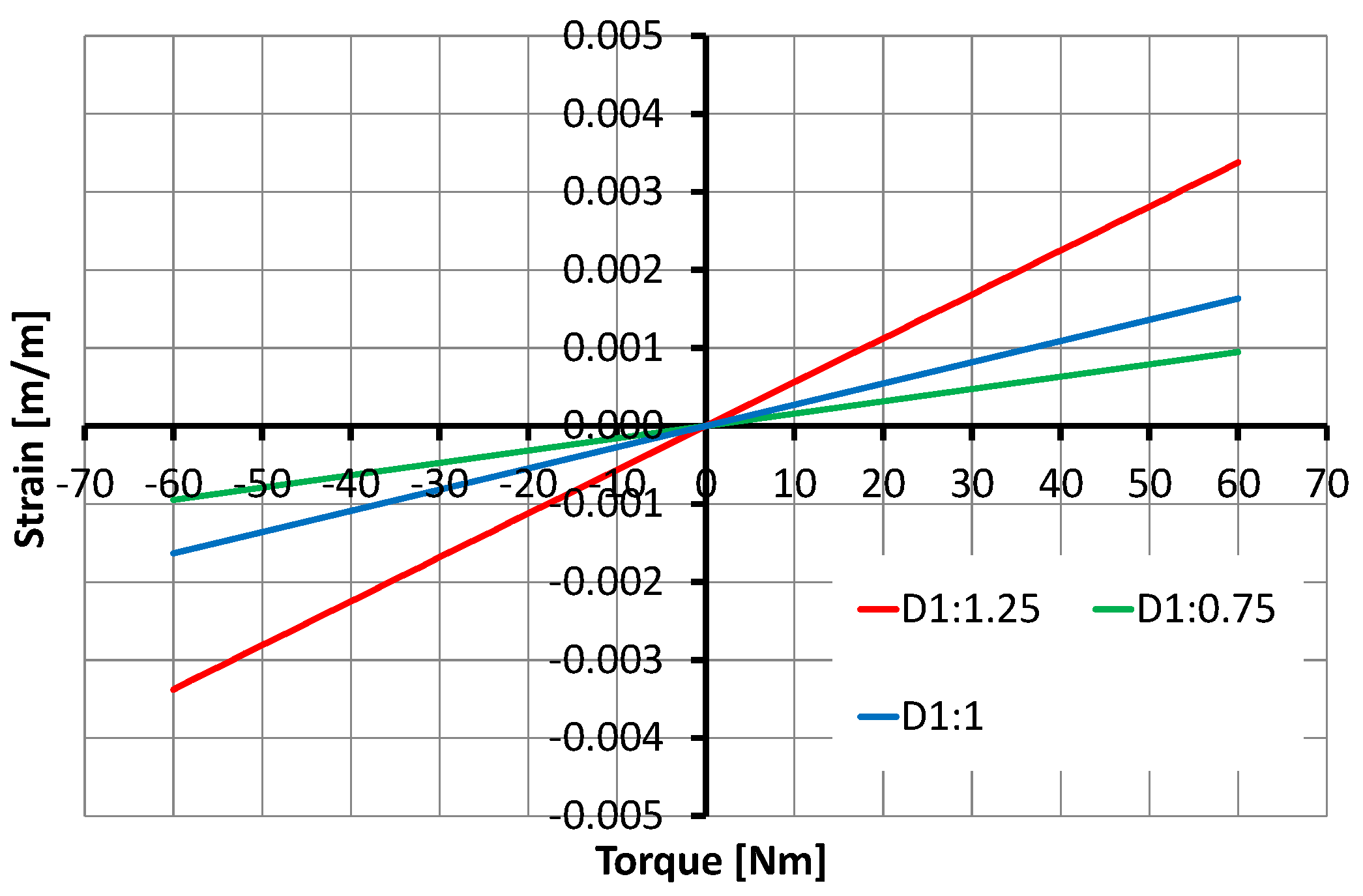
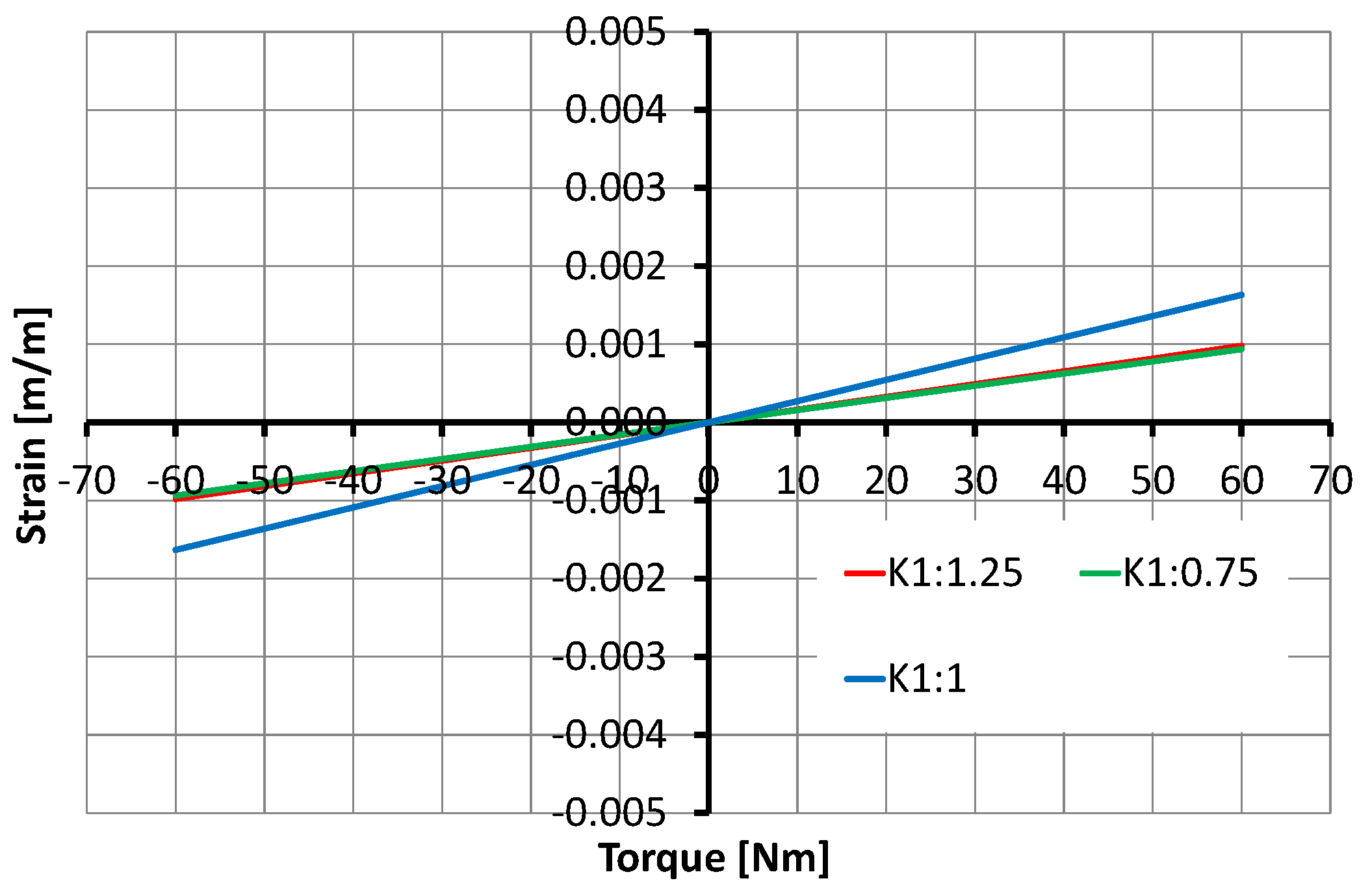
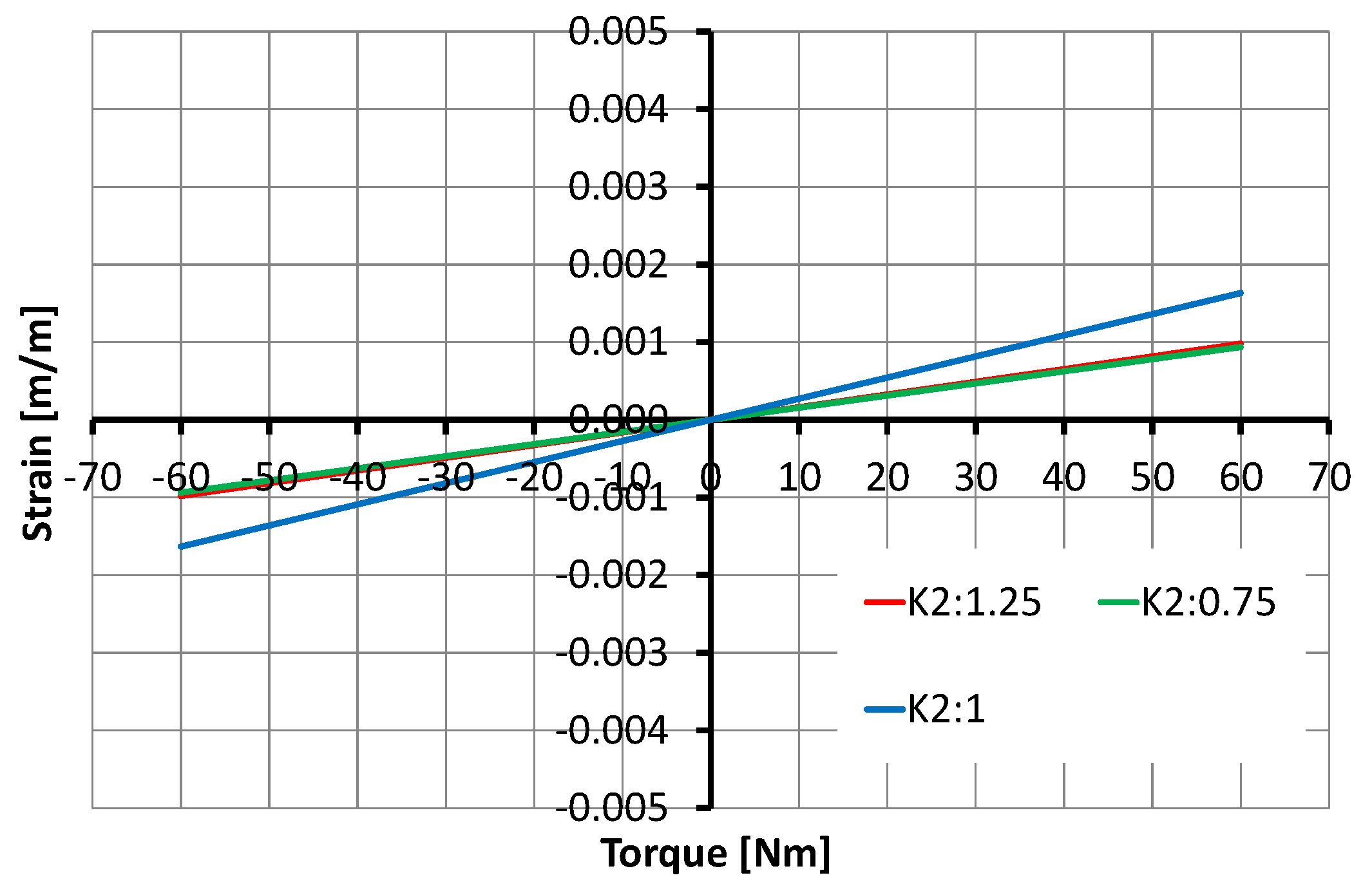
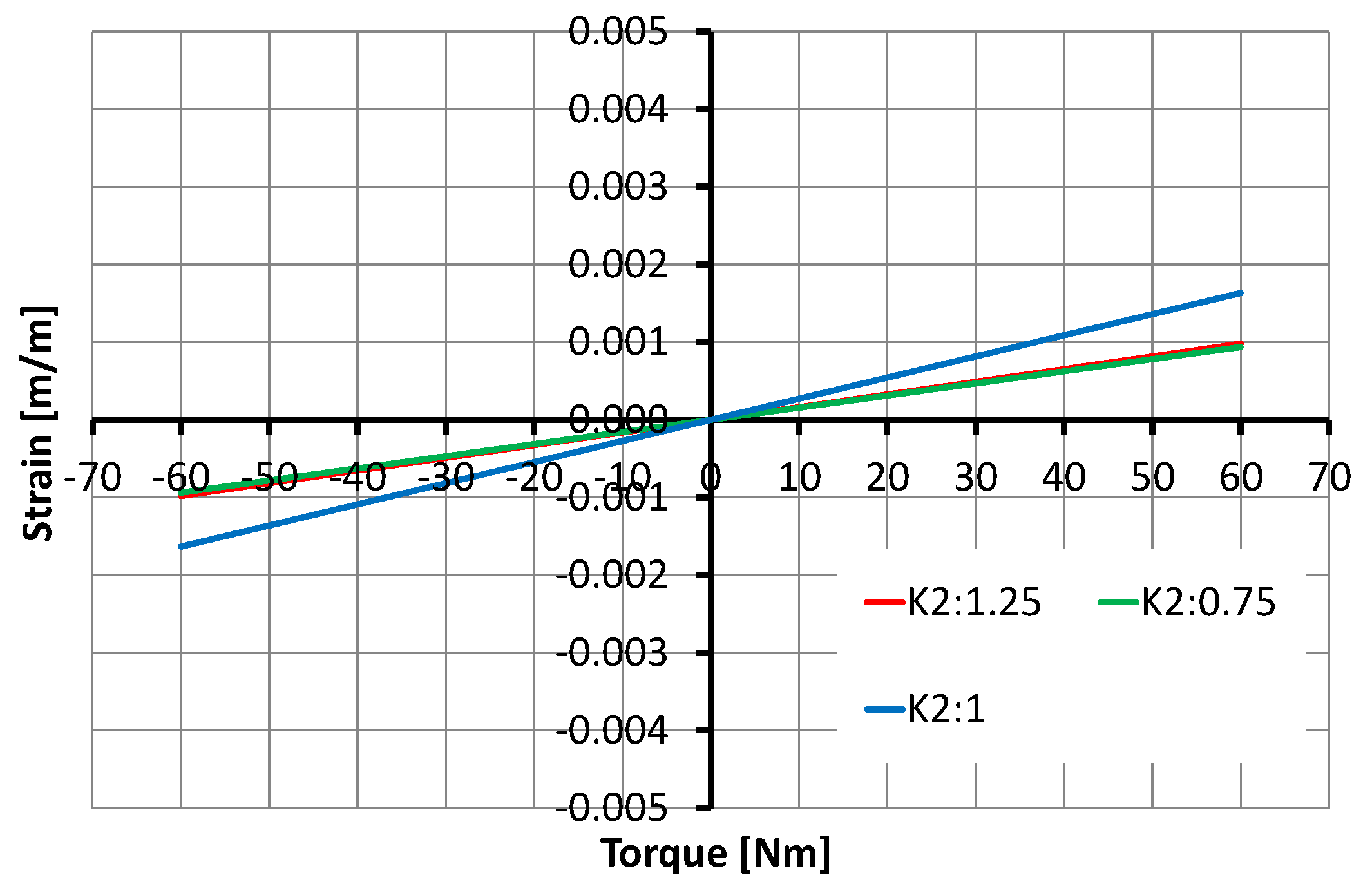
4.5. Effects of and
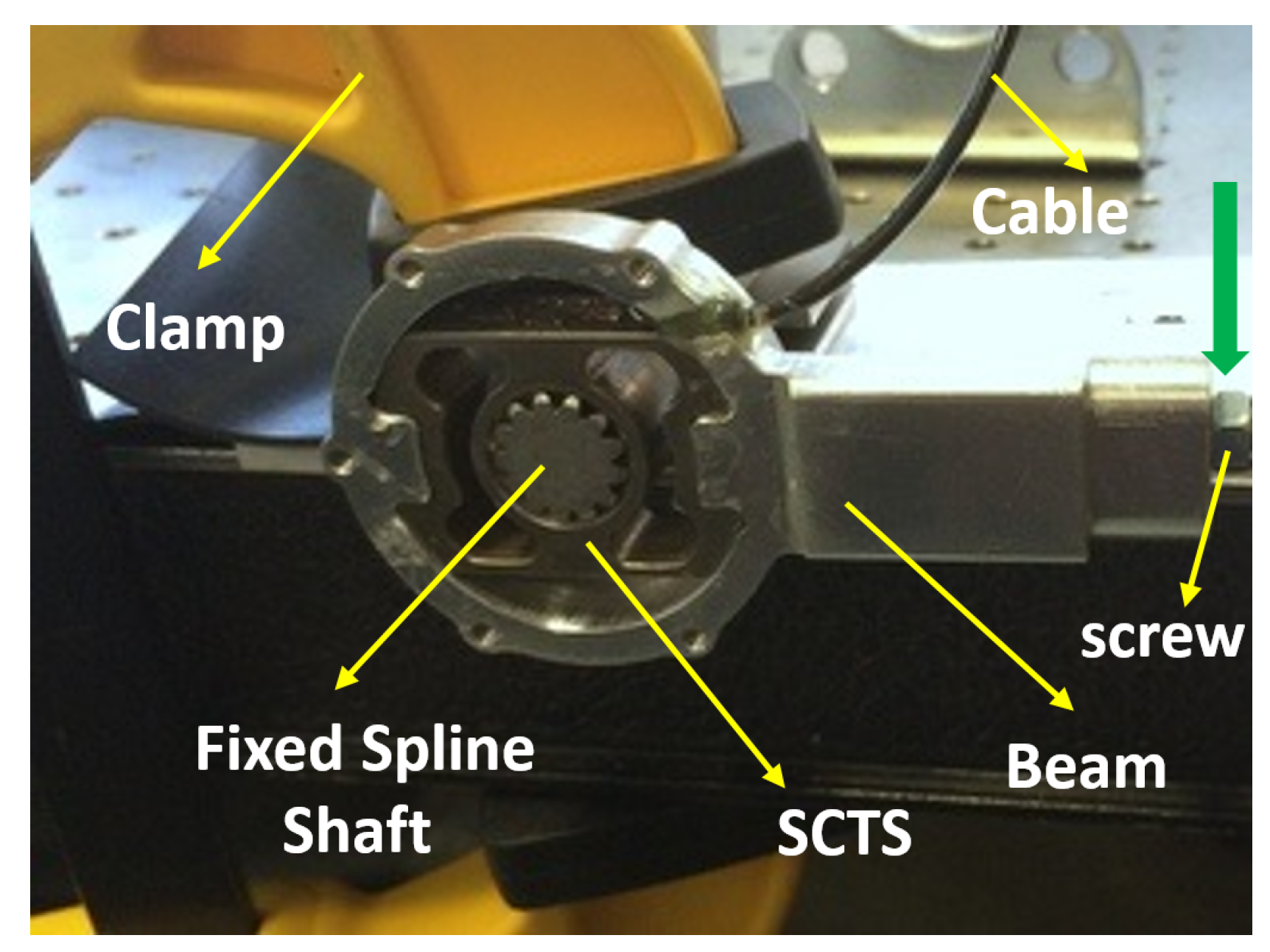
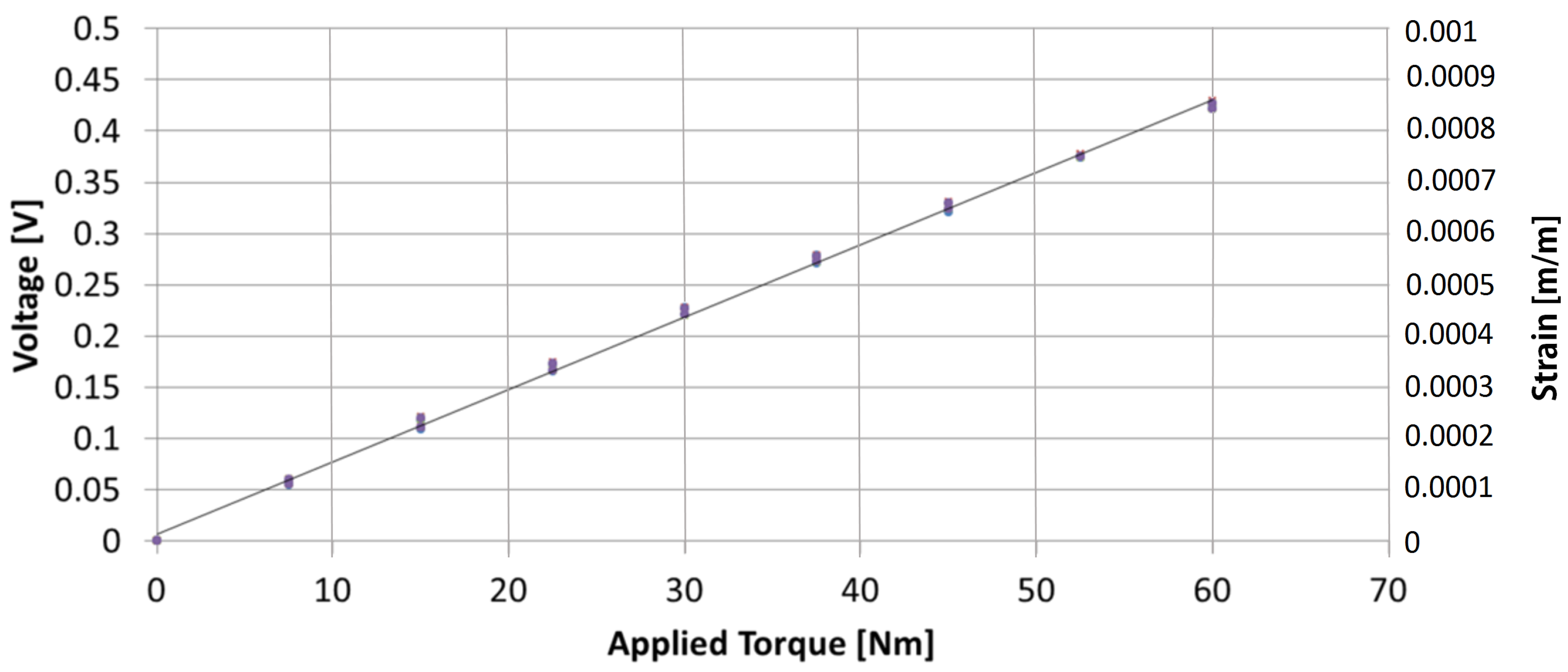
5. Experimental Results
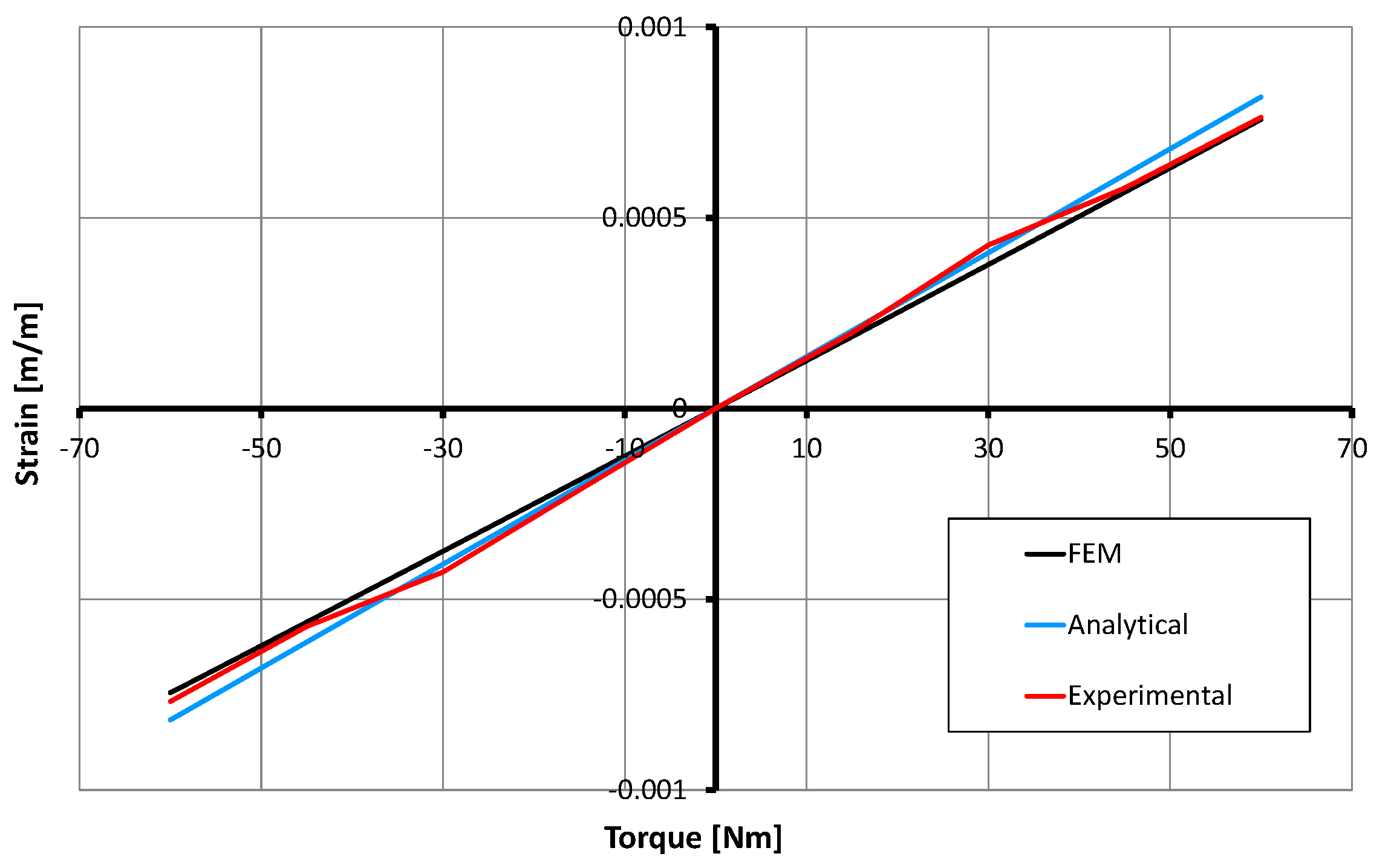
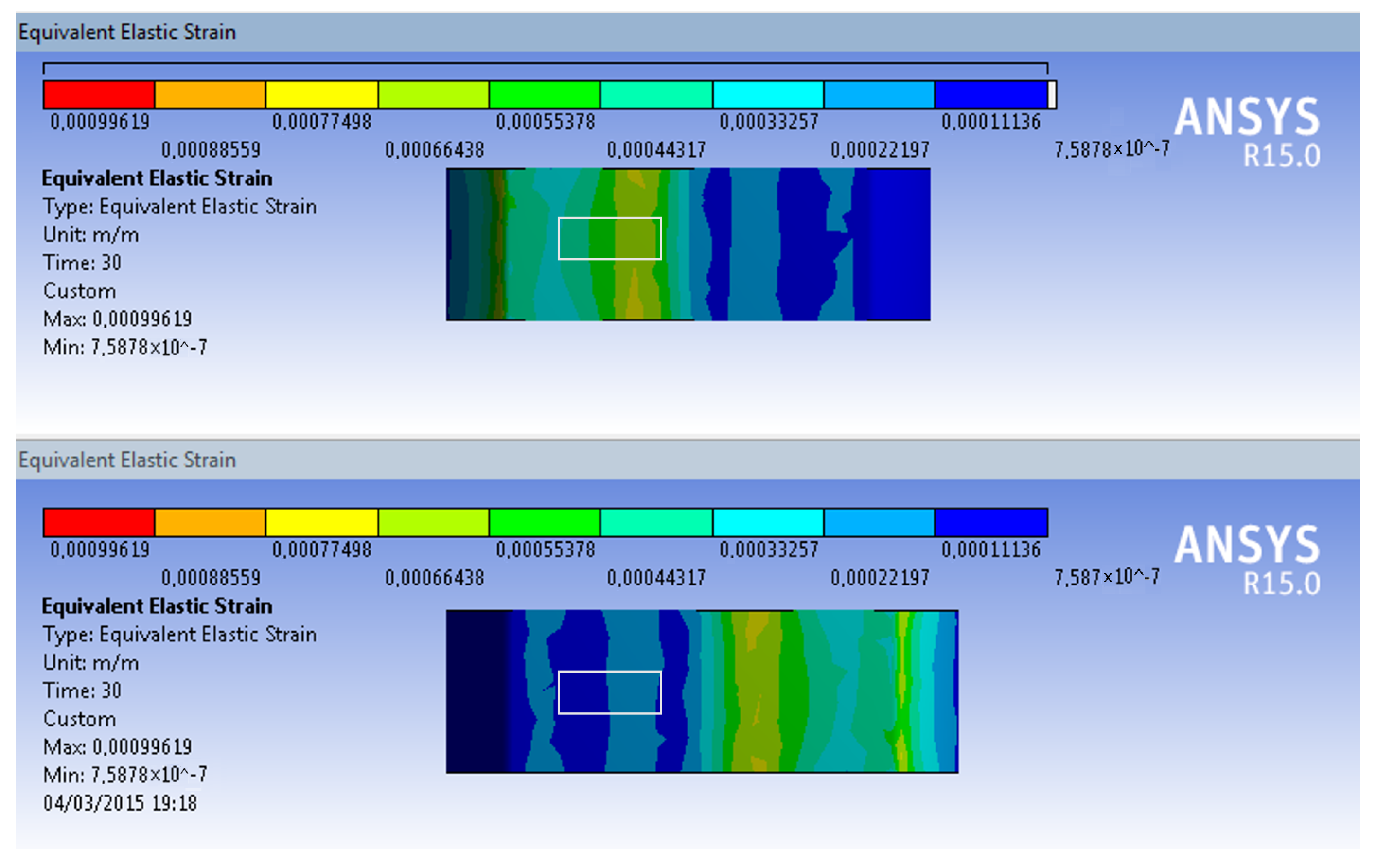
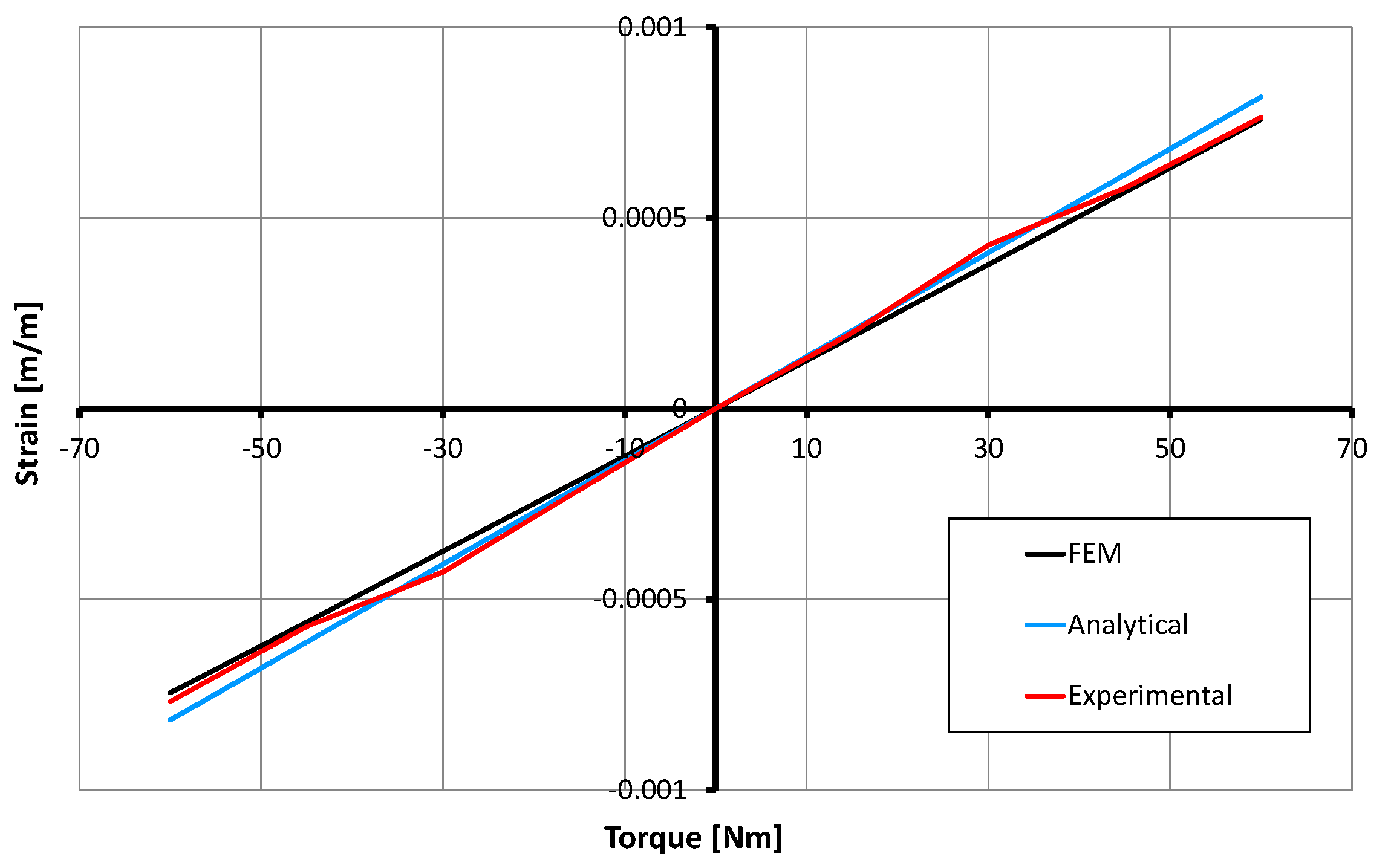
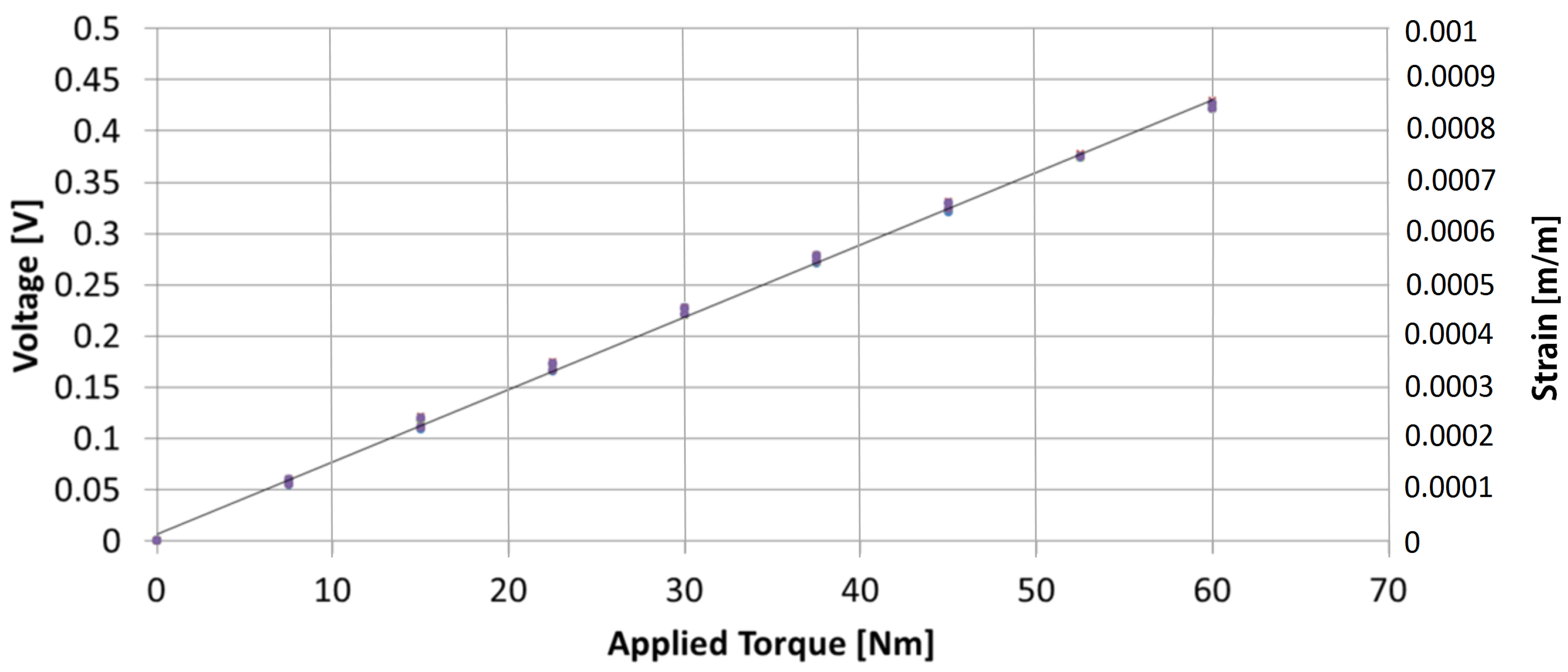
5.1. Validation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SCTS | Square-Cut Torque Sensor |
| FEM | Finite Element Method |
| FEA | Finite Element Analysis |
| DOF | Degree of Freedom |
| HyQ | Hydraulically actuated Quadruped robot |
| MiniHyQ | Miniaturized Hydraulically actuated Quadruped Robot |
| CAD | Computer-Aided Design |
| IIT | Istituto Italiano di Tecnologia |
References
- Kashiri, N.; Malzahn, J.; Tsagarakis, N. On the Sensor Design of Torque Controlled Actuators: A Comparison Study of Strain Gauge and Encoder Based Principles. IEEE Robot. Autom. Lett. 2017, 2, 1186–1194. [Google Scholar] [CrossRef]
- Khan, H.; Cannella, F.; Caldwell, D.; Semini, C. An Innovative Torque Sensor Design for the lightest Hydraulic Quadruped Robot. In Assistive Robotics: Proceedings of the 18th International Conference on Climbing and Walking Robots CLAWAR; World Scientific: Singapore, 2015. [Google Scholar]
- Chihaur, W.; Richard, P. Manipulator compliance based on joint torque control. In Proceedings of the 19th IEEE Conference on Decision and Control Including the Symposium on Adaptive Processes, Albuquerque, NM, USA, 10–12 December 1980. [Google Scholar]
- Price, T.; Kanade, T.; Desilva, C.W. Torque Sensor For Direct-Drive Manipulators. J. Eng. Ind. 1987, 109, 122–127. [Google Scholar]
- Tani, Y.; Hatamura, Y.; Nagao, T. Development of small three-component dynamometer for cutting force measurement. Bull. JSME 1983, 26, 650–658. [Google Scholar] [CrossRef]
- Vischer, D.; Khatib, O. Design and development of high-performance torque-controlled joints. IEEE Trans. Robot. Autom. 1995, 11, 537–544. [Google Scholar] [CrossRef]
- Aghili, F.; Buehler, M.; Hollerbach, J.M. A Joint Torque Sensor for Robots. In Proceedings of the 1997 ASME International Mechanical Engineering Congress & Exposition, Dallas, TX, USA, 16–21 November 1997. [Google Scholar]
- Fujii, I.; Inoue, T.; Dao, D.V.; Sugiyama, S.; Hirai, S. Tactile Perception using Micro Force/Moment Sensor Embedded in Soft Fingertip. In Proceedings of the 5th IEEE Conference on Sensors, Daegu, Korea, 22–25 October 2006; pp. 558–562. [Google Scholar]
- Zhang, H.X.; Ryoo, Y.J.; Byun, K.S. Development of Torque Sensor with High Sensitivity for Joint of Robot Manipulator Using 4-Bar Linkage Shape. Sensors 2016, 16, 991. [Google Scholar] [CrossRef] [PubMed]
- Qin, Y.; Zhao, Y.; Li, Y.; Zhao, Y.; Wang, P. A High Performance Torque Sensor for Milling Based on a Piezoresistive MEMS Strain Gauge. Sensors 2016, 16, 513. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Liu, Y.; Zou, T.; Jin, M.; Liu, H. Design and optimization of a novel six-axis force/torque sensor for space robot. Measurement 2015, 65, 135–148. [Google Scholar] [CrossRef]
- Hong, D.H.; Kim, Y.G.; Kwak, J.H.; Jeong, C.P.; An, J. Miniature force-torque sensor using semiconductor strain gage sensor frame design and analysis for development. In Proceedings of the 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Korea, 26–28 November 2012; pp. 627–628. [Google Scholar]
- Wolf, S.; Hirzinger, G. A new variable stiffness design: Matching requirements of the next robot generation. In Proceedings of the IEEE International Conference on Robotics and Automation ICRA, Pasadena, CA, USA, 19–23 May 2008; pp. 1741–1746. [Google Scholar]
- Gao, X.; Jin, M.; Xie, Z.; Jiang, L.; Ni, F.; Shi, S.C.; Wei, R.; Cai, H. Development of the Chinese Intelligent Space Robotic System. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 2006; pp. 994–1001. [Google Scholar]
- Finio, B.M.; Galloway, K.C.; Wood, R.J. An ultra-high precision, high bandwidth torque sensor for microrobotics applications. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 31–38. [Google Scholar]
- Ma, J.; Song, A. Fast estimation of strains for cross-beams six-axis force/torque sensors by mechanical modeling. Sensors 2013, 13, 6669–6686. [Google Scholar] [CrossRef] [PubMed]
- Wei, N.; Sun, H.; Jia, Q.; Ji, X.; Shi, H. Analysis and Design Optimization of a Compact and Lightweight Joint Torque Sensor for Space Manipulators. Adv. Mech. Eng. 2013, 2013, 111–114. [Google Scholar] [CrossRef]
- Liu, J.; Li, M.; Qin, L.; Liu, J. Active design method for the static characteristics of a piezoelectric six-axis force/torque sensor. Sensors 2014, 14, 659–671. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Liu, Y.; Liu, H. Temperature compensation for six-dimension force/torque sensor based on Radial Basis Function Neural Network. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014. [Google Scholar]
- DImperio, M.; Cannella, F.; Semini, C.; Caldwell, D.; Catelani, D.; Bernetti, R. Finite Element Analysis Within Component Design Process of Hydraulic Quadruped Robot. In Proceedings of the ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Buffalo, NY, USA, 17–20 August 2014; p. V007T05A005. [Google Scholar]
- Song, A.; Wu, J.; Qin, G.; Huang, W. A novel self-decoupled four degree-of-freedom wrist force/torque sensor. Measurement 2007, 40, 883–891. [Google Scholar] [CrossRef]
- Liang, Q.; Zhang, D.; Coppola, G.; Mao, J.; Sun, W.; Wang, Y.; Ge, Y. Design and analysis of a sensor system for cutting force measurement in machining processes. Sensors 2016, 16, 70. [Google Scholar] [CrossRef] [PubMed]
- Perry, D.M. Multi-axis force and torque sensing. Sens. Rev. 1997, 17, 117–120. [Google Scholar] [CrossRef]
- Noh, Y.; Bimbo, J.; Sareh, S.; Wurdemann, H.; Fraś, J.; Chathuranga, D.S.; Liu, H.; Housden, J.; Althoefer, K.; Rhode, K. Multi-Axis force/torque sensor based on Simply-Supported beam and optoelectronics. Sensors 2016, 16, 1936. [Google Scholar] [CrossRef] [PubMed]
- Golinelli, N.; Spaggiari, A.; Castagnetti, D.; Fornari, L.; Dragoni, E.; Gualdi, G.; Brunazzi, A. Development of a driveshaft torque transducer for low-cost structural health monitoring of off-highway vehicles. Proc. Inst. Mech. Eng. Part L 2016. [Google Scholar] [CrossRef]
- Pfeffer, L.; Khatib, O.; Hake, J. Joint torque sensory feedback in the control of a PUMA manipulator. IEEE Trans. Robot. Automat. 1989, 5, 418–425. [Google Scholar] [CrossRef]
- Hirzinger, G.; Albu-Schaffer, A.; Hahnle, M.; Schaefer, I.; Sporer, N. On a new generation of torque controlled light-weight robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Asada, H.; Lim, S.K. Design of joint torque sensors and torque feedback control for direct-drive arms. In ASME Winter Annual Meeting: Robotics and Manufacturing Automation; PED: Miami Beach, FL, USA, 1985; Volume 15, pp. 277–284. [Google Scholar]
- Haruhiko Asada, K.Y.T. Direct-Drive Robots: Theory and Practice; MIT PR: Cambridge, MA, USA, 1987. [Google Scholar]
- Kang, M.K.; Lee, S.; Kim, J.H. Shape optimization of a mechanically decoupled six-axis force/torque sensor. Sens. Actuators A Phys. 2014, 209, 41–51. [Google Scholar] [CrossRef]
- Aghili, F. Design of a Hollow Hexaform Torque Sensor for Robot Joints. Int. J. Robot. Res. 2001, 20, 967–976. [Google Scholar] [CrossRef]
- Jones, B.E.; Yan, T. MEMS force and torque sensors/A review. Meas. Control 2004, 37, 236–241. [Google Scholar] [CrossRef]
- Khan, H.; Kitano, S.; Frigerio, M.; Barasuol, V.; Featherstone, R.; Caldwell, D.G.; Semini, C. Development of the Lightweight Hydraulic Quadruped Robot—MiniHyQ. In Proceedings of the The IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 11–12 May 2015. [Google Scholar]
- Courtney, T.A. Mechanical Behavior of Materials; McGraw-Hill: New York, NY, USA, 1990; pp. 295–309. [Google Scholar]
- Young, W.C.; Budynas, R.G. Roark’s Formulas for Stress and Strain; McGraw-Hill: New York, NY, USA, 2002; Volume 7. [Google Scholar]
- Da Silva, M.C. Non-linear flexural-flexural-torsional-extensional dynamics of beams I. Formulation. Int. J. Solids Struct. 1988, 24, 1225–1234. [Google Scholar] [CrossRef]
- Pilkey, W.D. Analysis and Design of Elastic Beams: Computational Methods; Wiley: Hoboken, NJ, USA, 2002. [Google Scholar]
- Doebelin, E.O.; Manik, D.N. Measurement Systems: Application and Design; McGraw-Hill: New York, NY, USA, 2007. [Google Scholar]
- Figliola, R.S.; Beasley, D. Theory and Design for Mechanical Measurements; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Nodes | Elements | Degree of freedom (DOF) for Each Simulation | Material | Scale | W | H |
|---|---|---|---|---|---|---|---|
| 0 | 262740 | 13137 | 1576440 | 39NiCrMo3 | 1:1 | 1:1 | 1:1 |
| 1 | 262740 | 13137 | 1576440 | 7075 Aluminium | 1:1 | 1:1 | 1:1 |
| 2 | 262740 | 13137 | 1576440 | Ti64 Titanium | 1:1 | 1:1 | 1:1 |
| 3 | 262240 | 13112 | 1573440 | 39NiCrMo3 | 1:1.25 | 1:1 | 1:1 |
| 4 | 262380 | 13119 | 1574280 | 39NiCrMo3 | 1:0.75 | 1:1 | 1:1 |
| 5 | 288100 | 14405 | 1728600 | 39NiCrMo3 | 1:1 | 1:1.25 | 1:1 |
| 6 | 205860 | 10293 | 1235160 | 39NiCrMo3 | 1:1 | 1:0.75 | 1:1 |
| 7 | 271040 | 13552 | 1626240 | 39NiCrMo3 | 1:1 | 1:1 | 1:1.25 |
| 8 | 249840 | 12492 | 1499040 | 39NiCrMo3 | 1:1 | 1:1 | 1:0.75 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, H.; D’Imperio, M.; Cannella, F.; Caldwell, D.G.; Cuschieri, A.; Semini, C. Towards Scalable Strain Gauge-Based Joint Torque Sensors. Sensors 2017, 17, 1905. https://doi.org/10.3390/s17081905
Khan H, D’Imperio M, Cannella F, Caldwell DG, Cuschieri A, Semini C. Towards Scalable Strain Gauge-Based Joint Torque Sensors. Sensors. 2017; 17(8):1905. https://doi.org/10.3390/s17081905
Chicago/Turabian StyleKhan, Hamza, Mariapaola D’Imperio, Ferdinando Cannella, Darwin G. Caldwell, Alfred Cuschieri, and Claudio Semini. 2017. "Towards Scalable Strain Gauge-Based Joint Torque Sensors" Sensors 17, no. 8: 1905. https://doi.org/10.3390/s17081905
APA StyleKhan, H., D’Imperio, M., Cannella, F., Caldwell, D. G., Cuschieri, A., & Semini, C. (2017). Towards Scalable Strain Gauge-Based Joint Torque Sensors. Sensors, 17(8), 1905. https://doi.org/10.3390/s17081905