
Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs

 ,
,  ,
,  ,
,  and
and 
Abstract
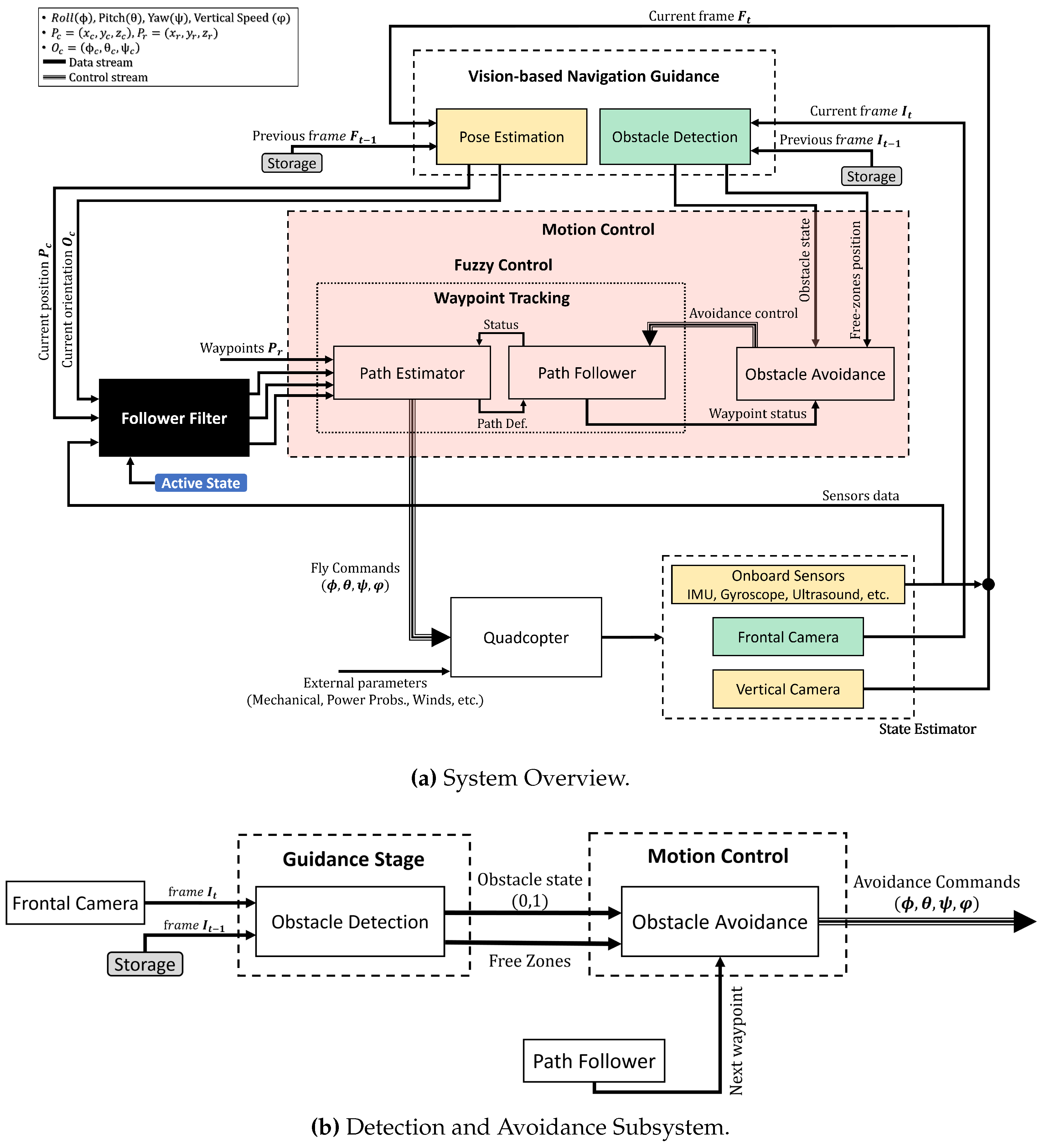
:1. Introduction
2. Related Work
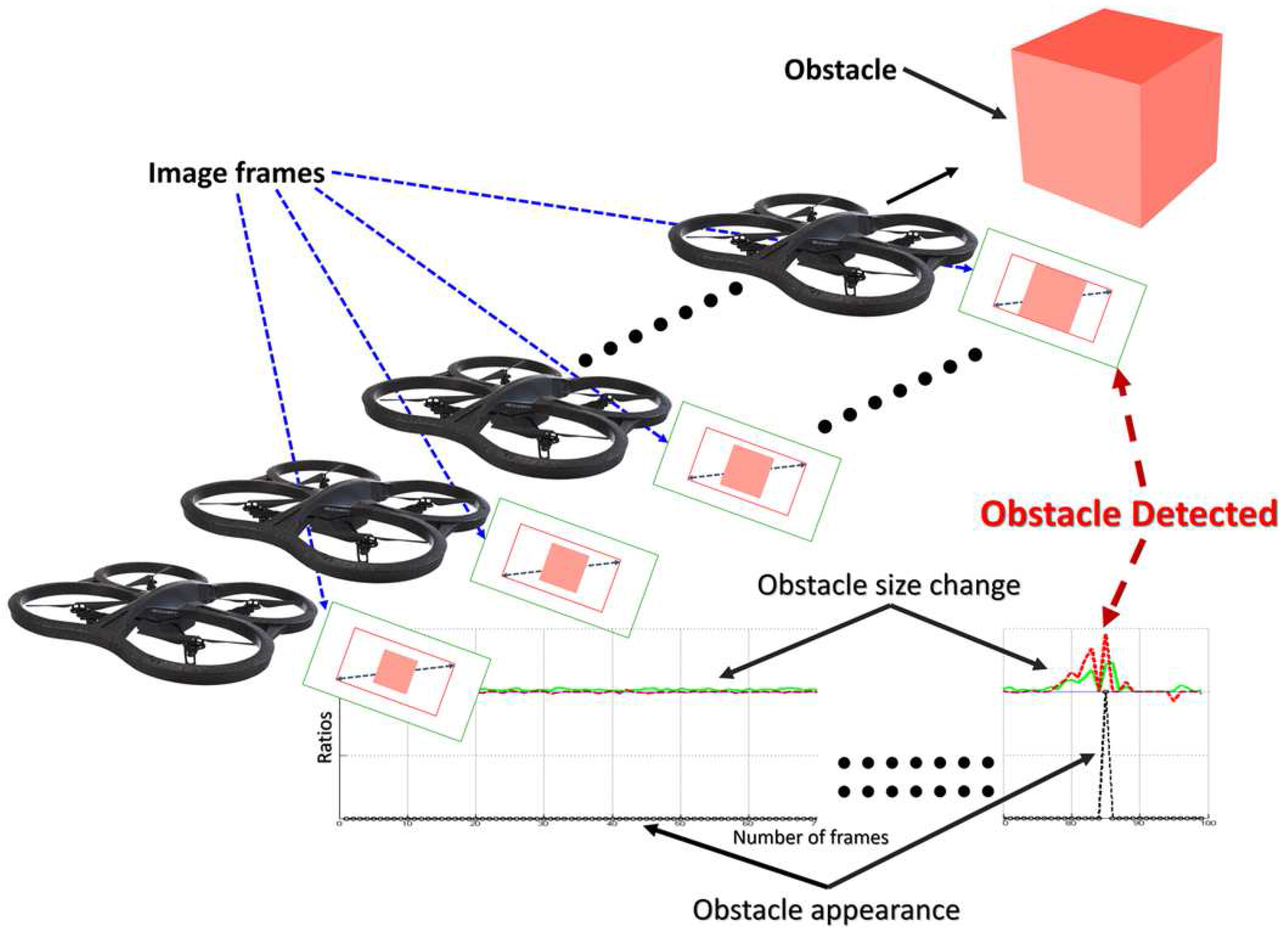
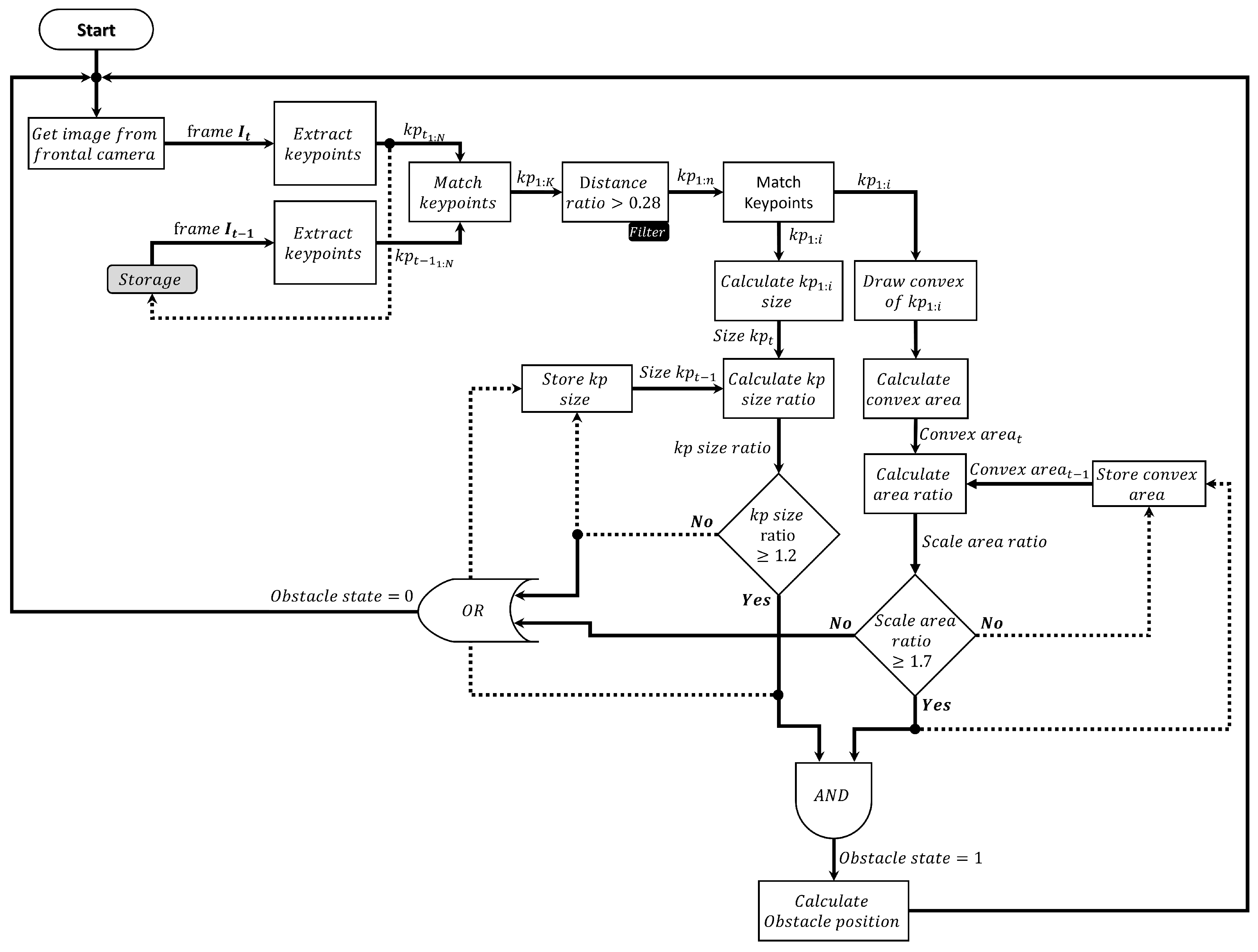
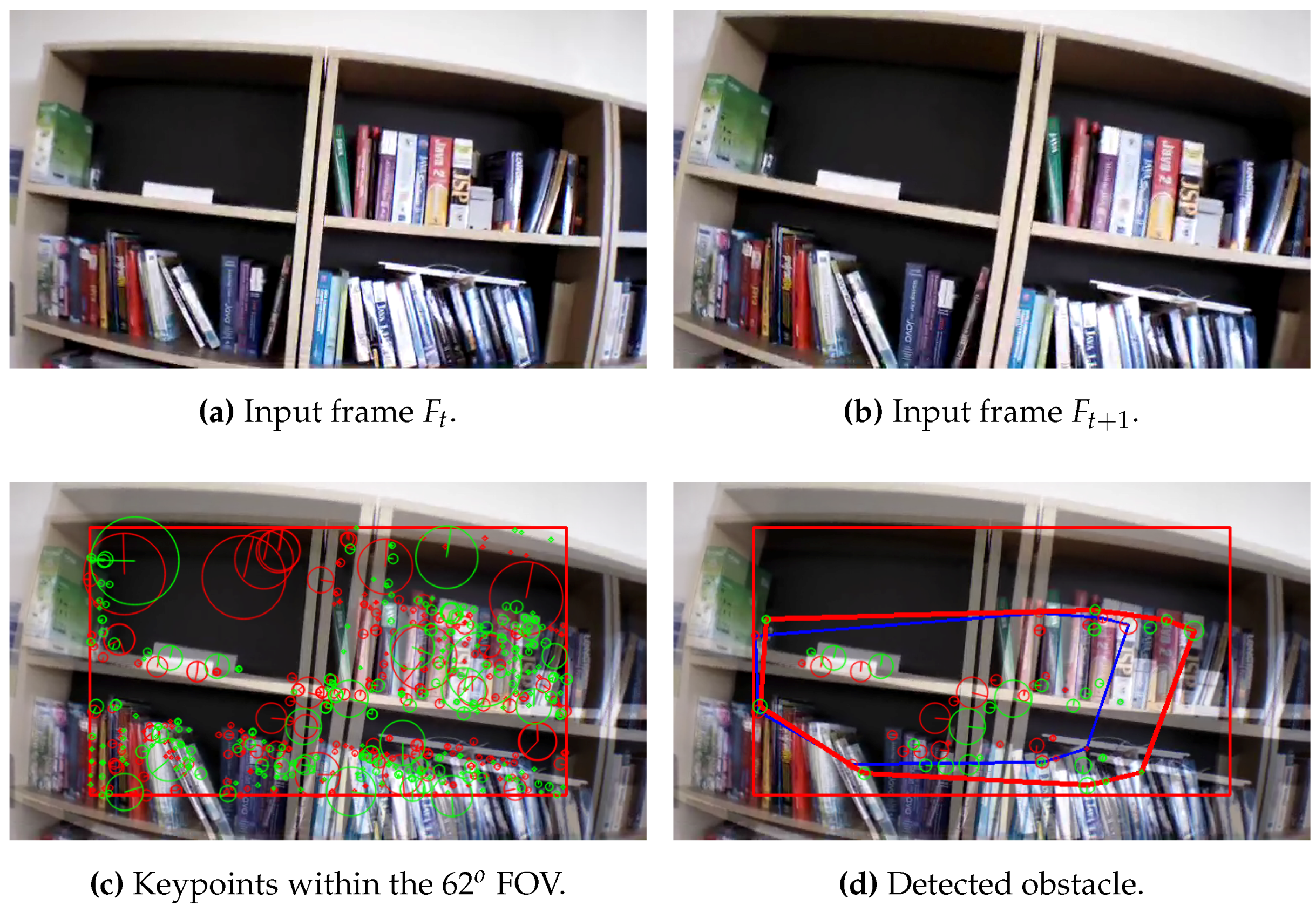
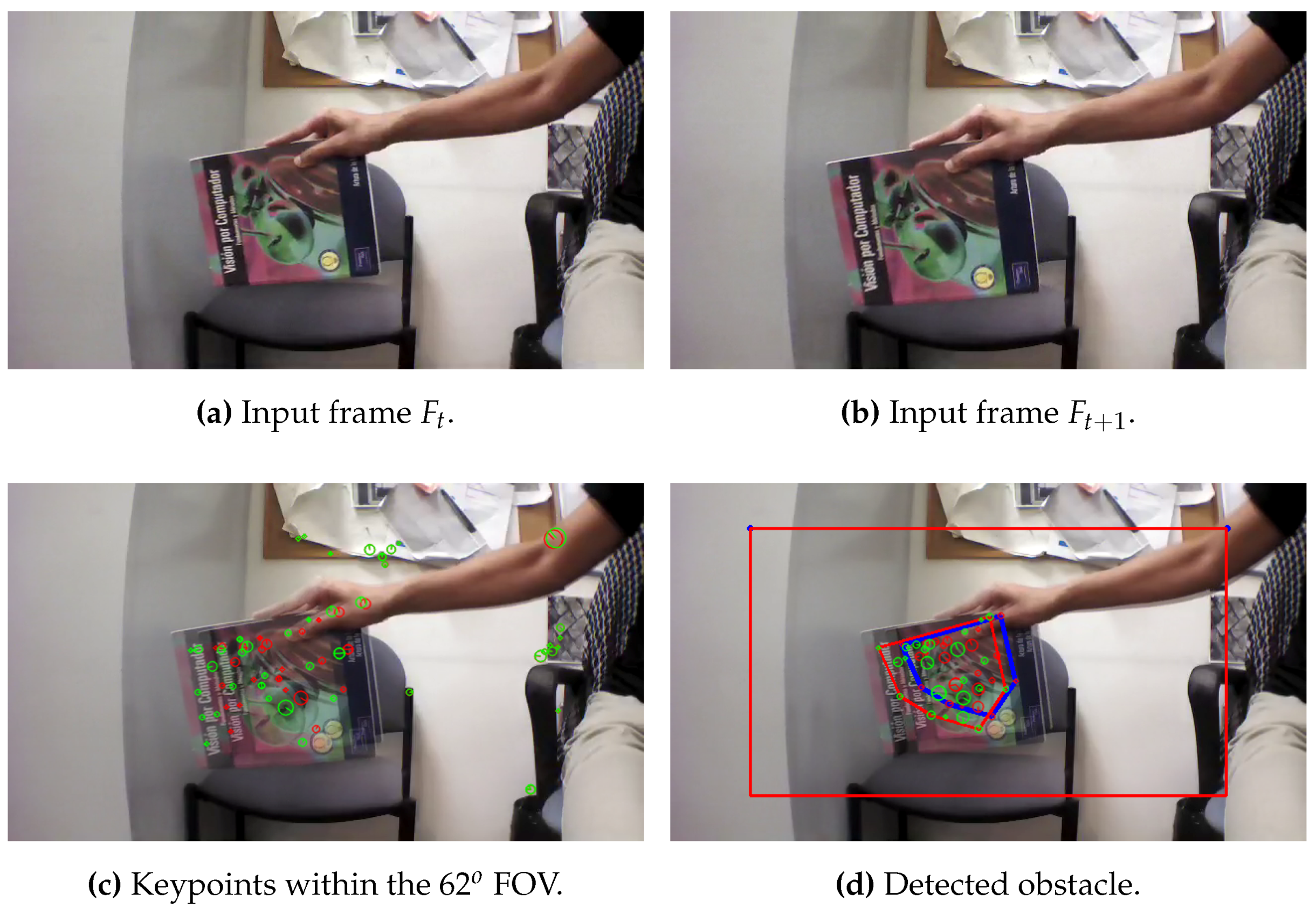
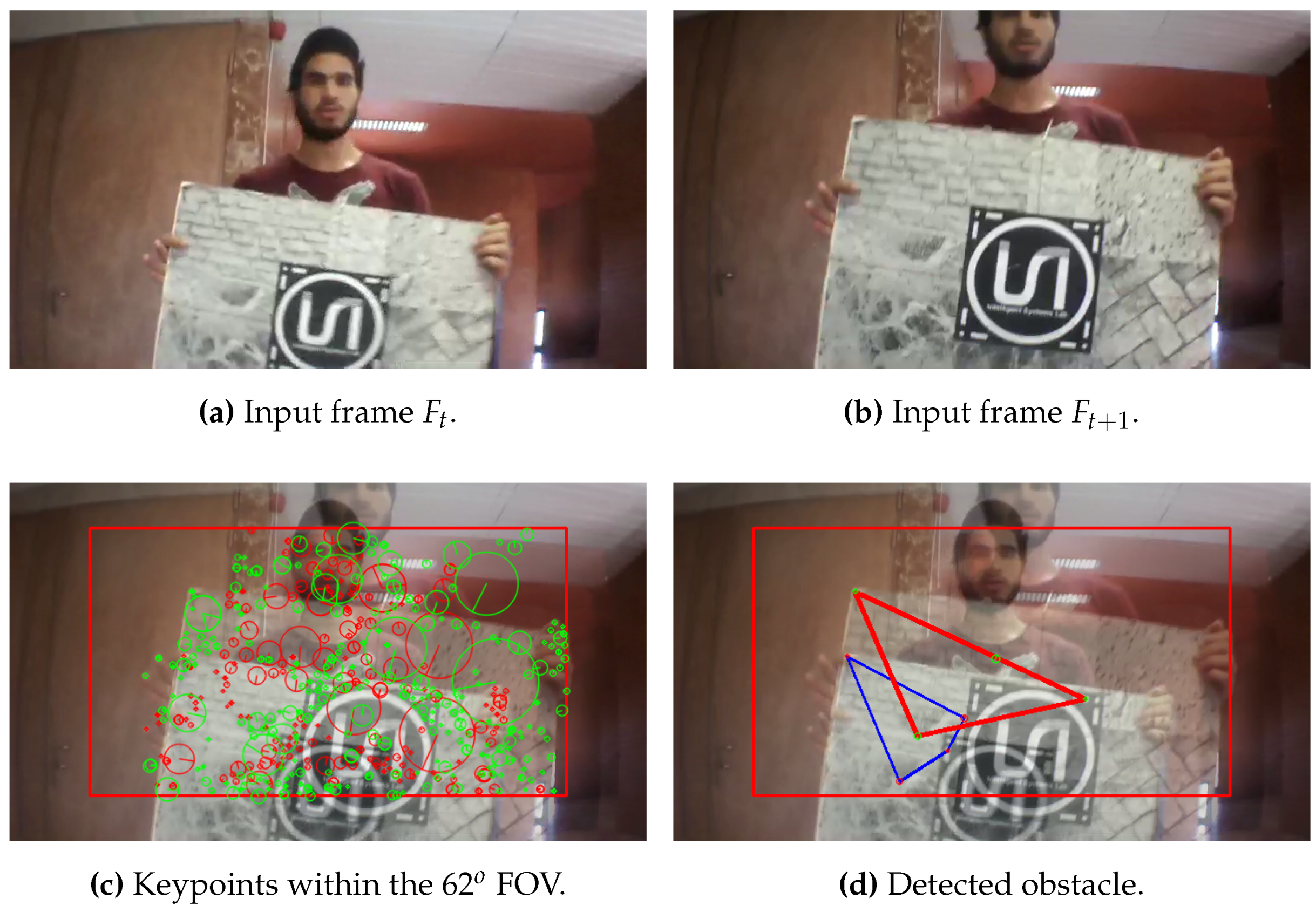
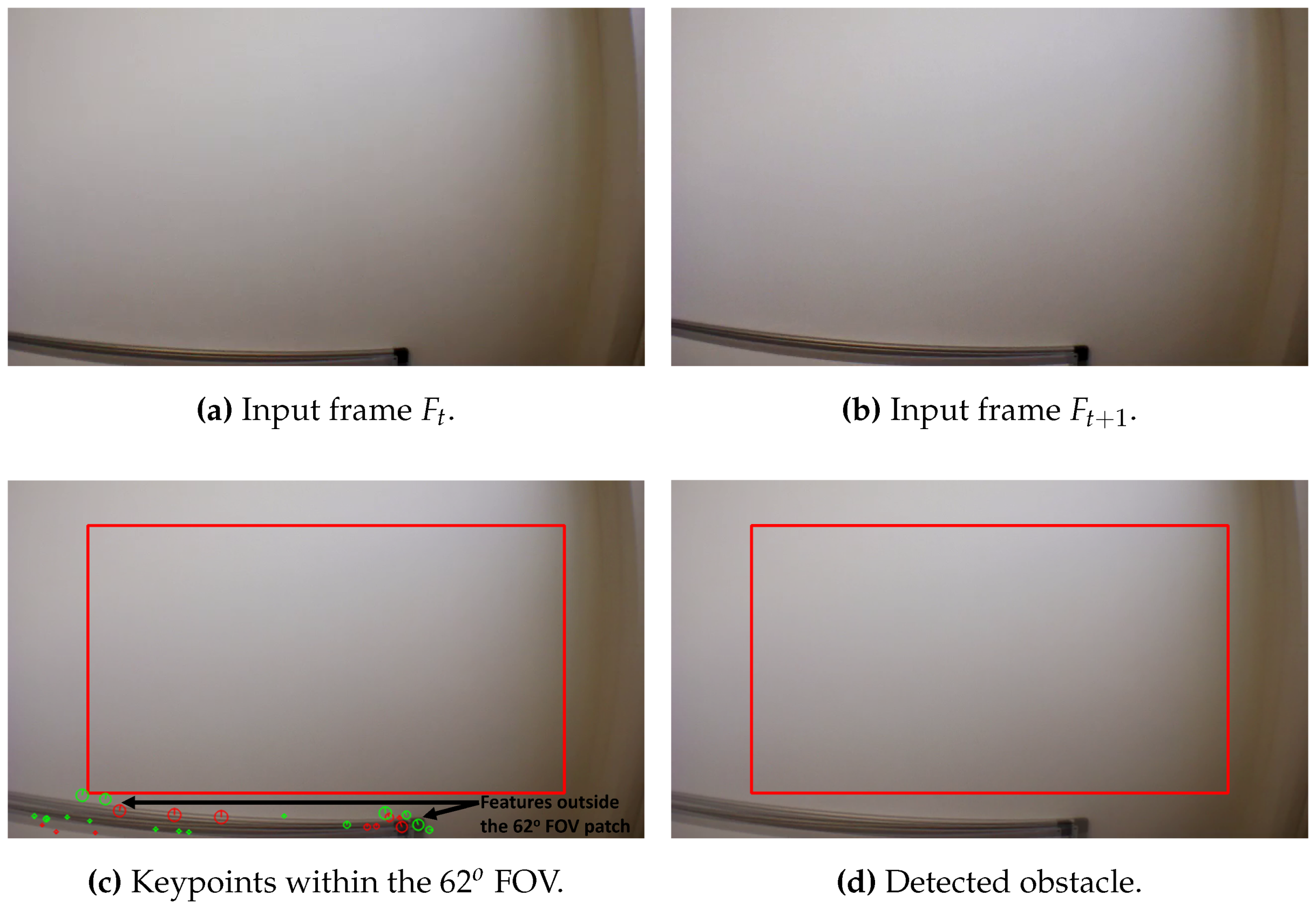
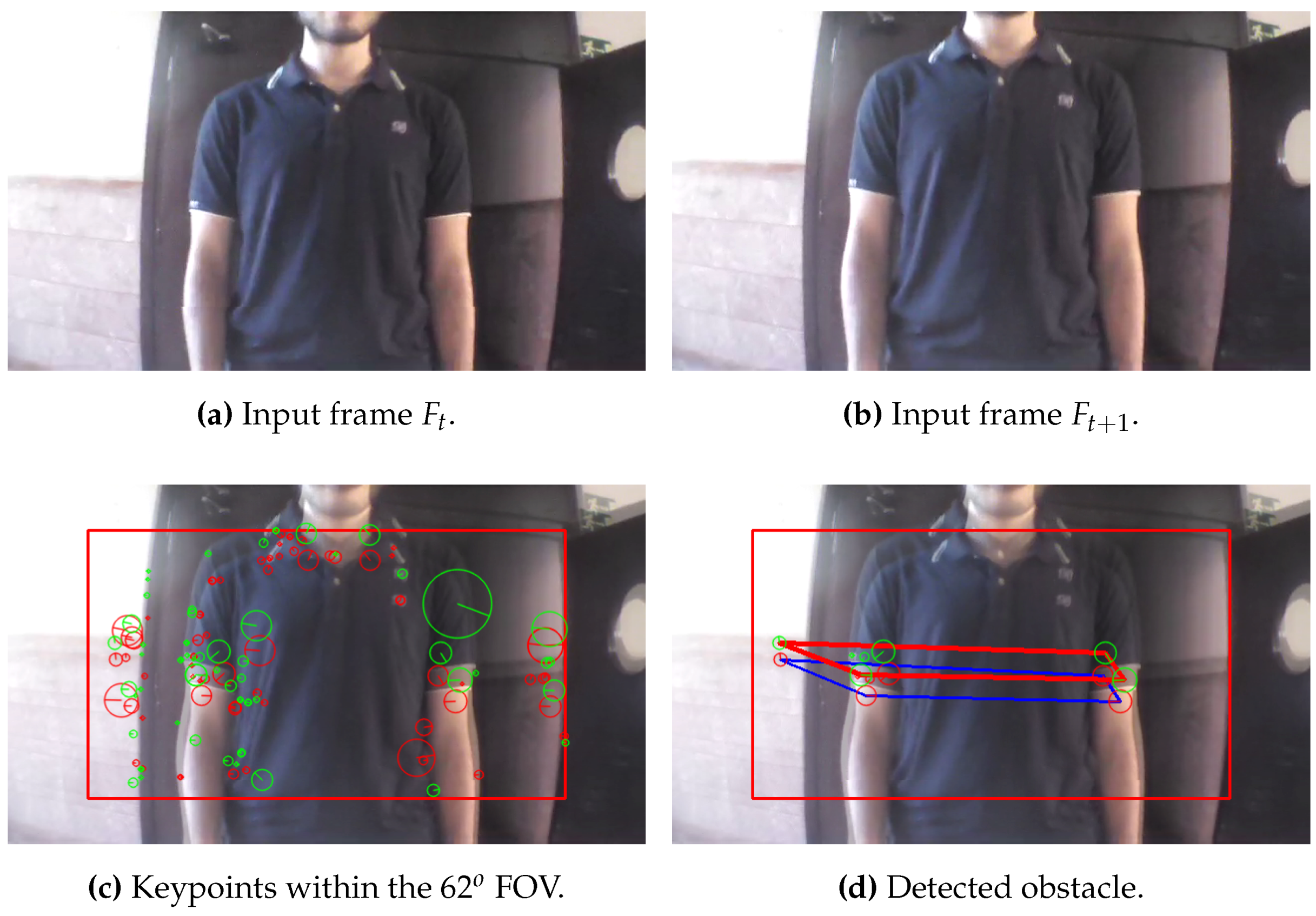
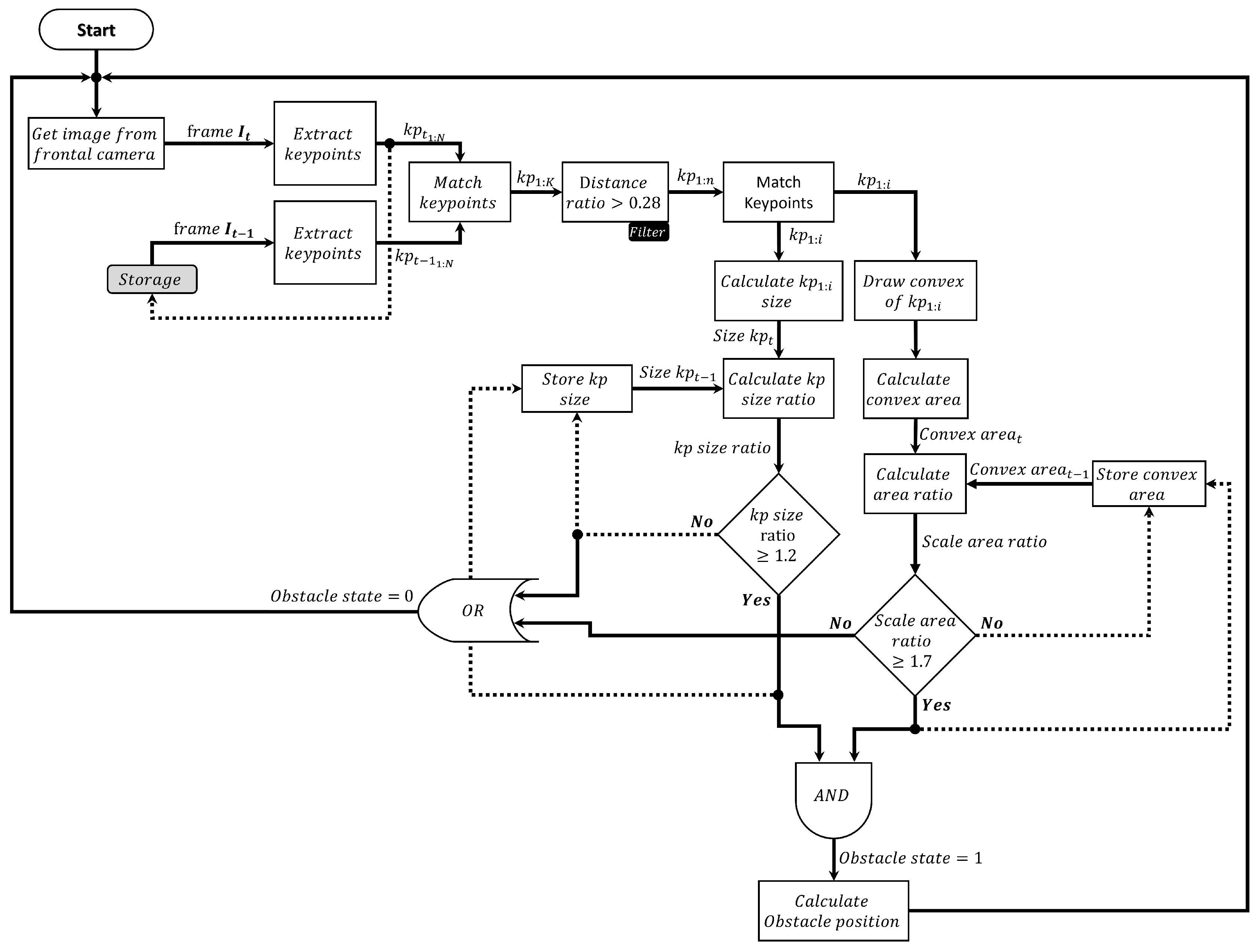
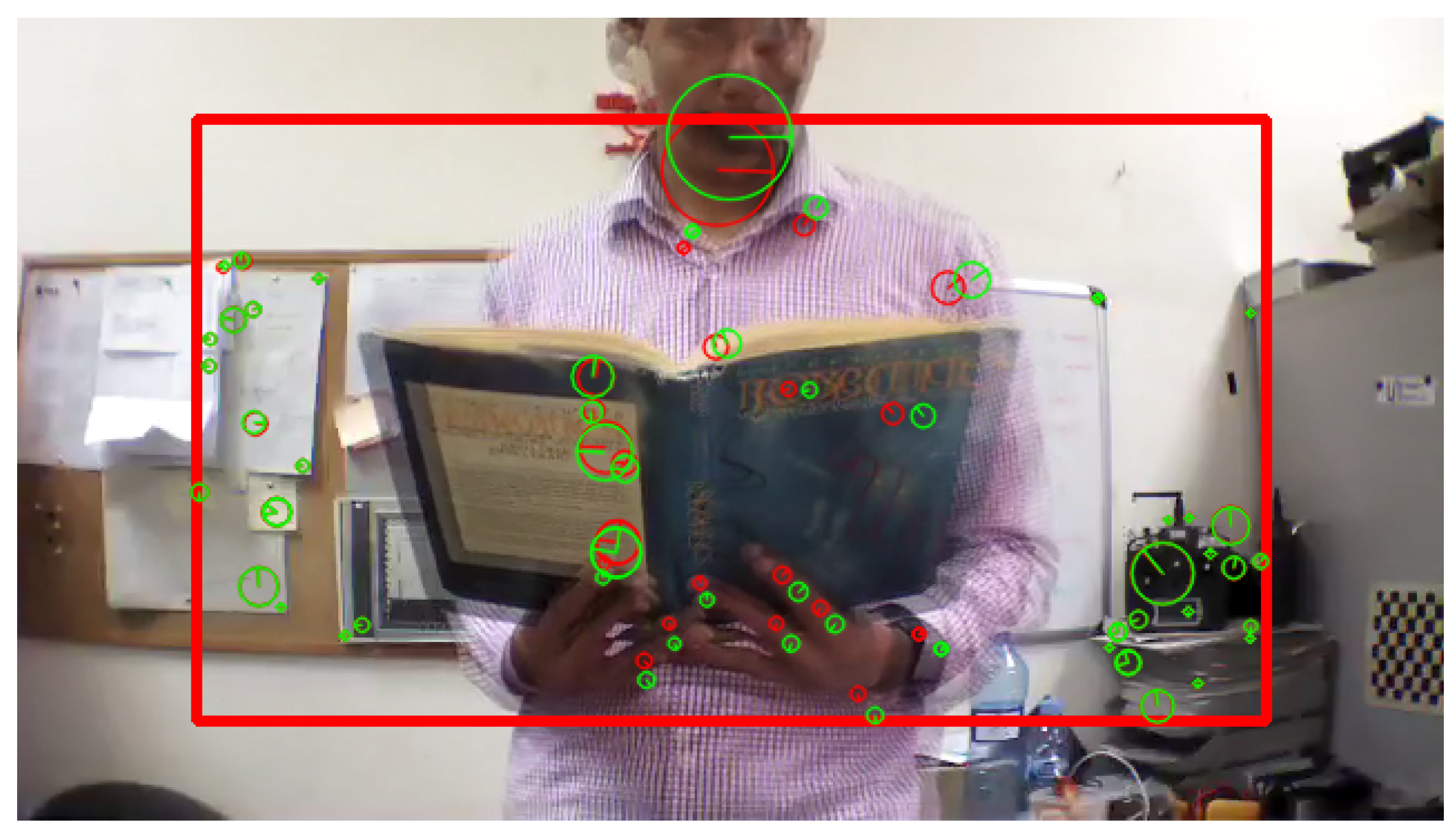
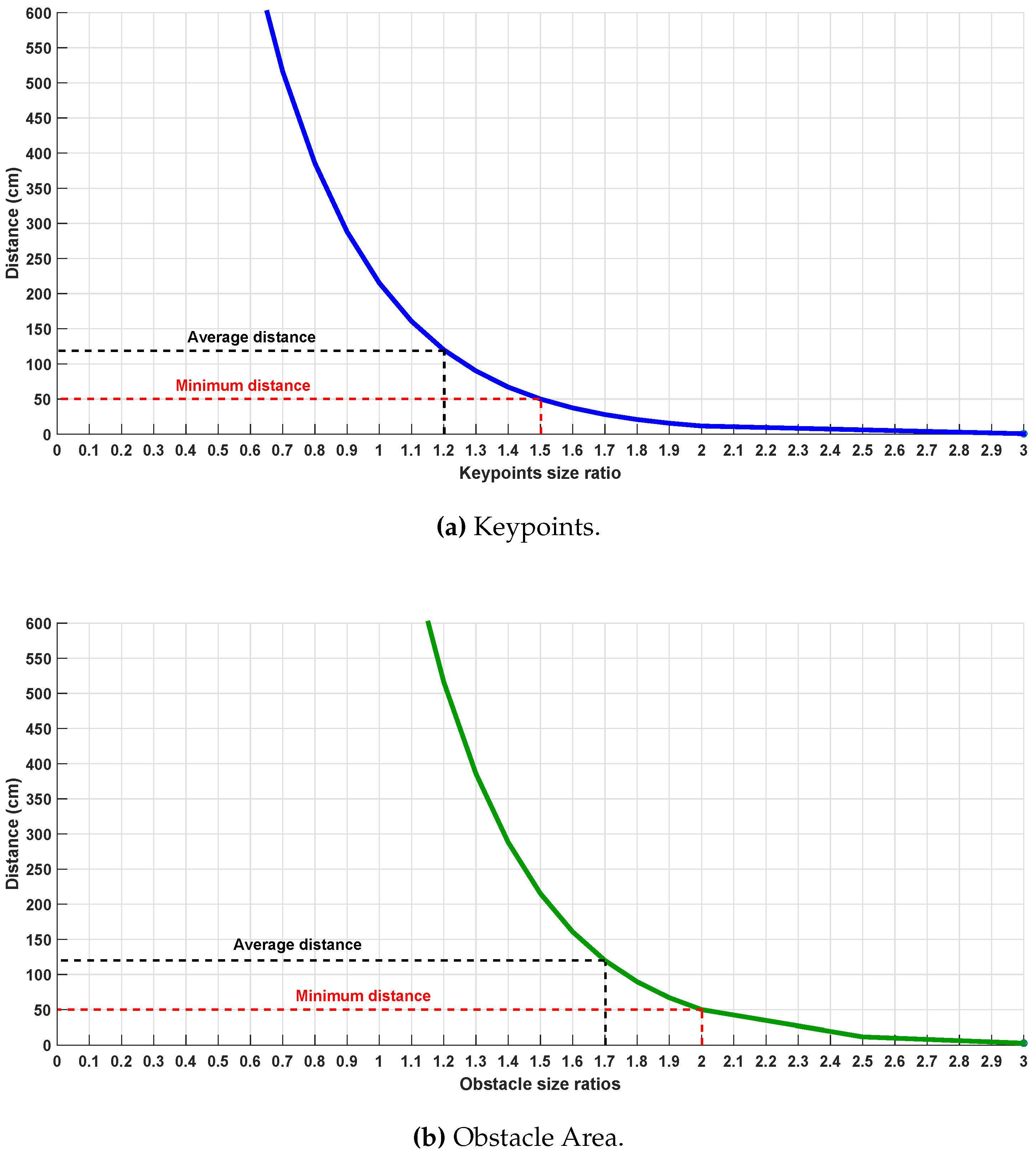
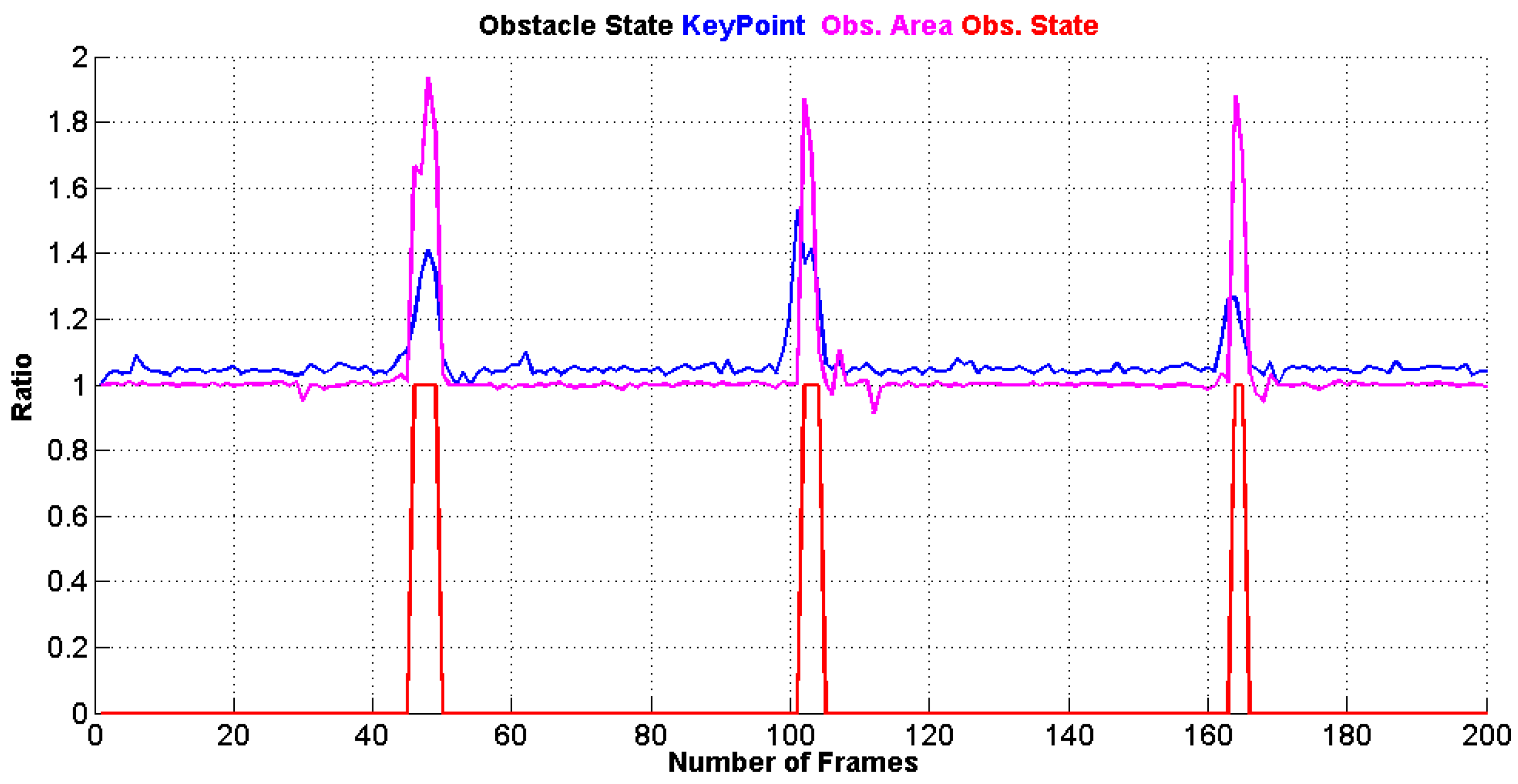
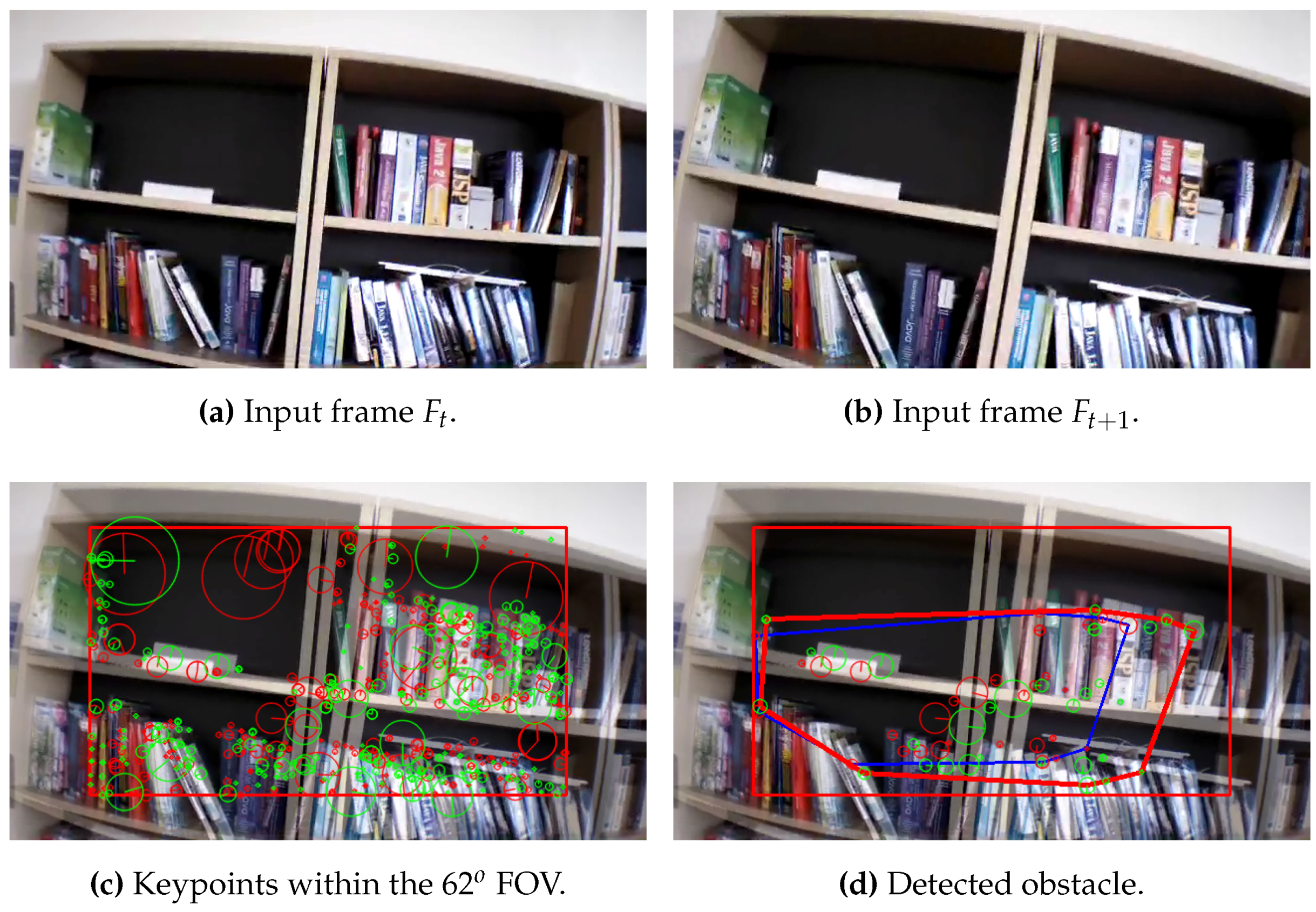
3. Obstacle Detection
| Algorithm 1: Obstacle Detection |
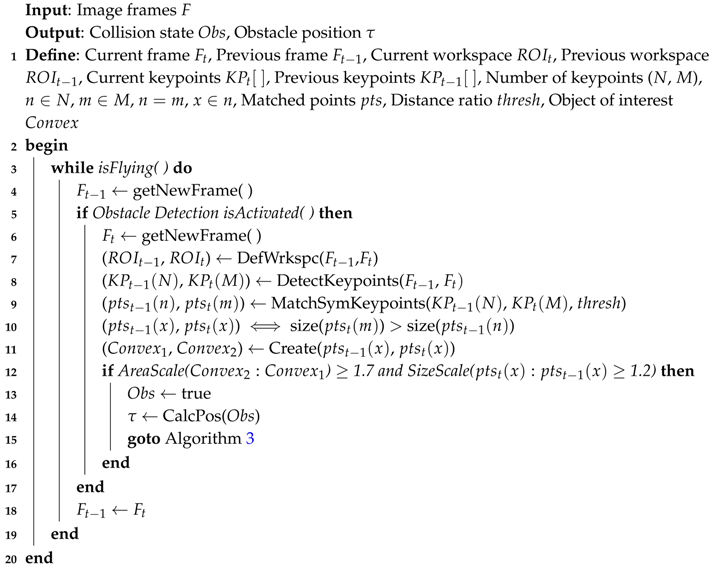 |
3.1. Feature Detection and Description
| Algorithm 2: Brute-Force Matcher |
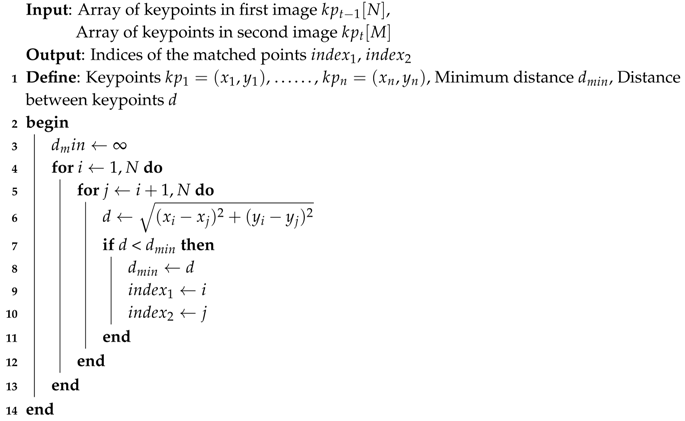 |
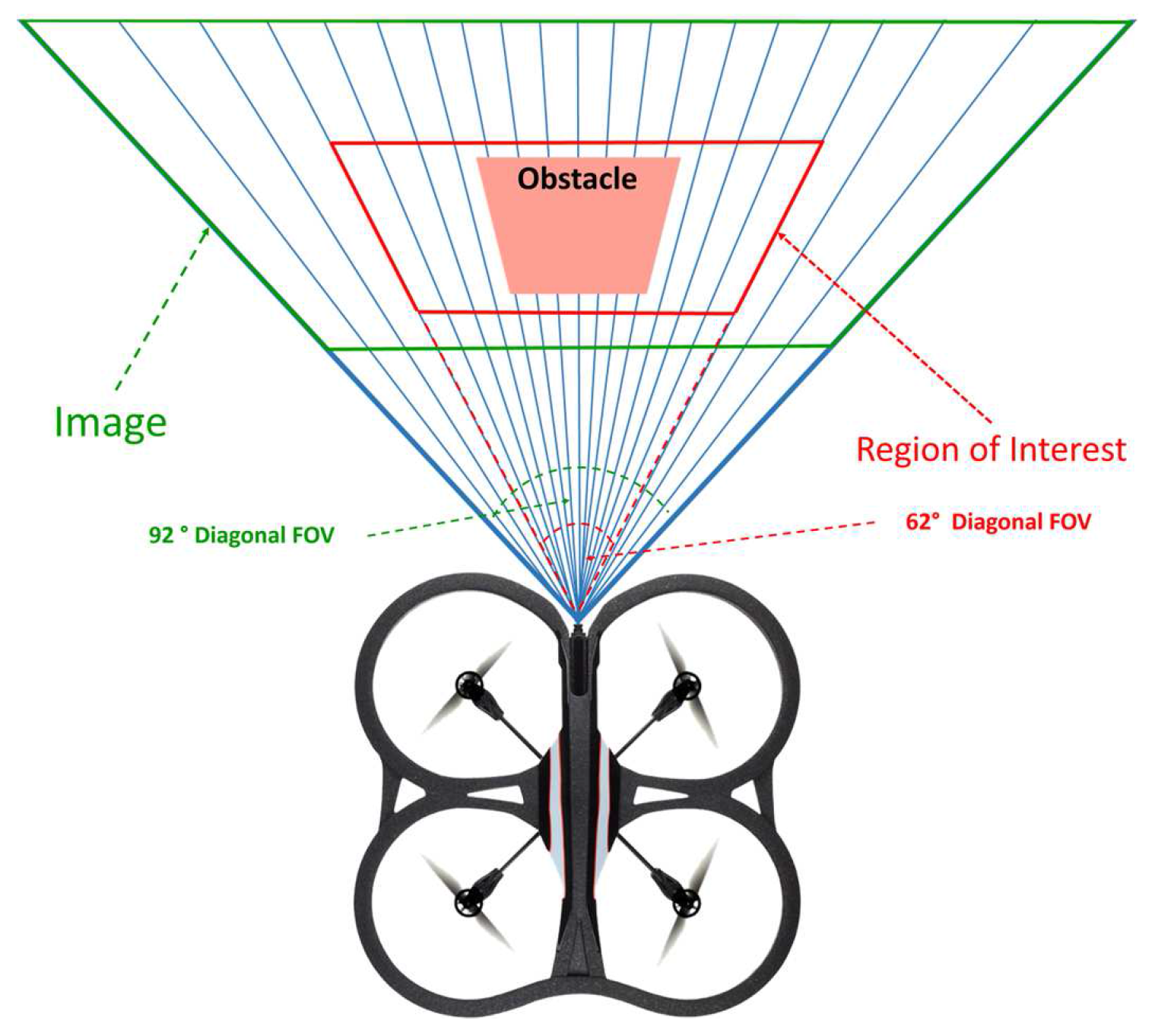
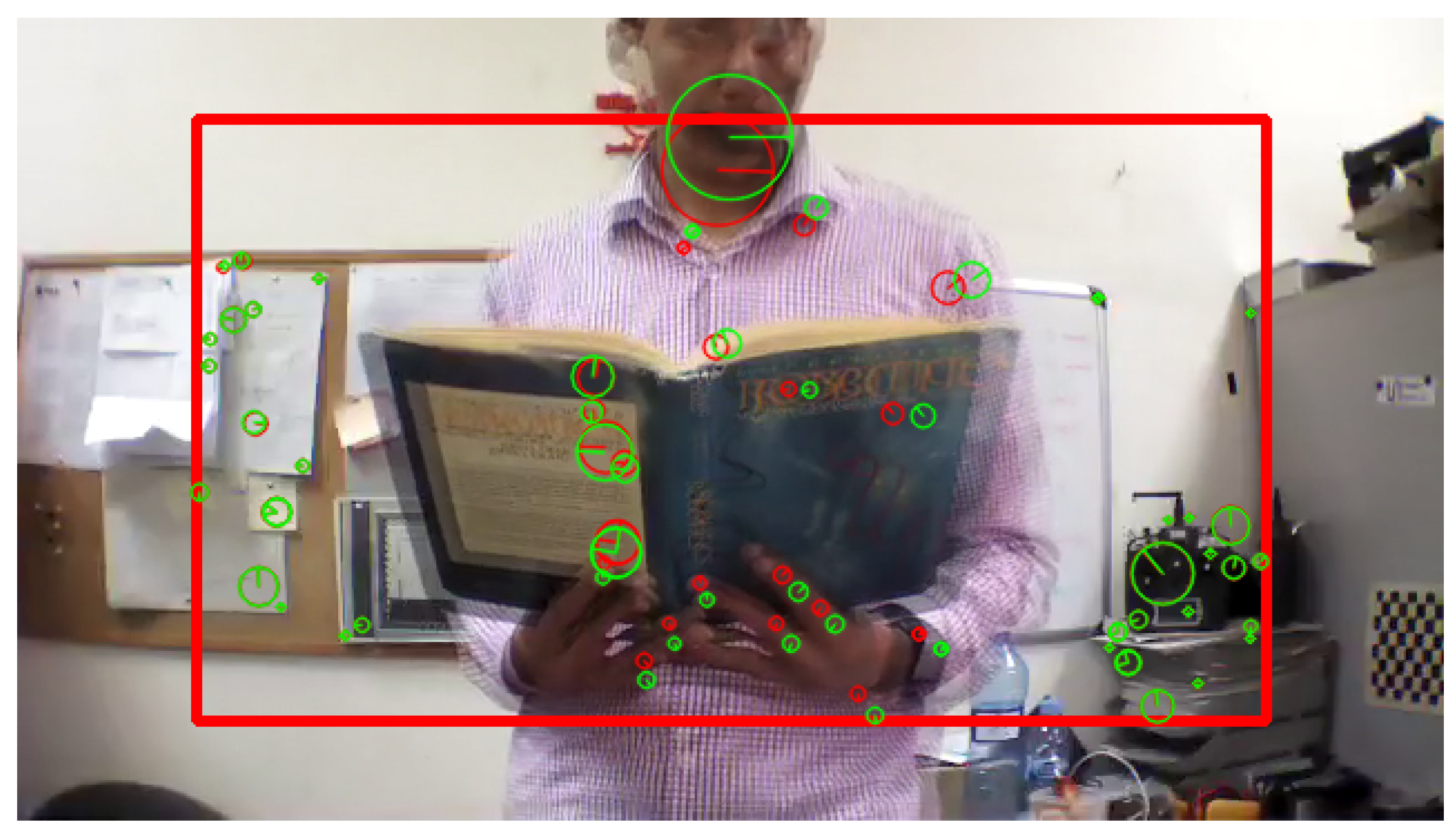
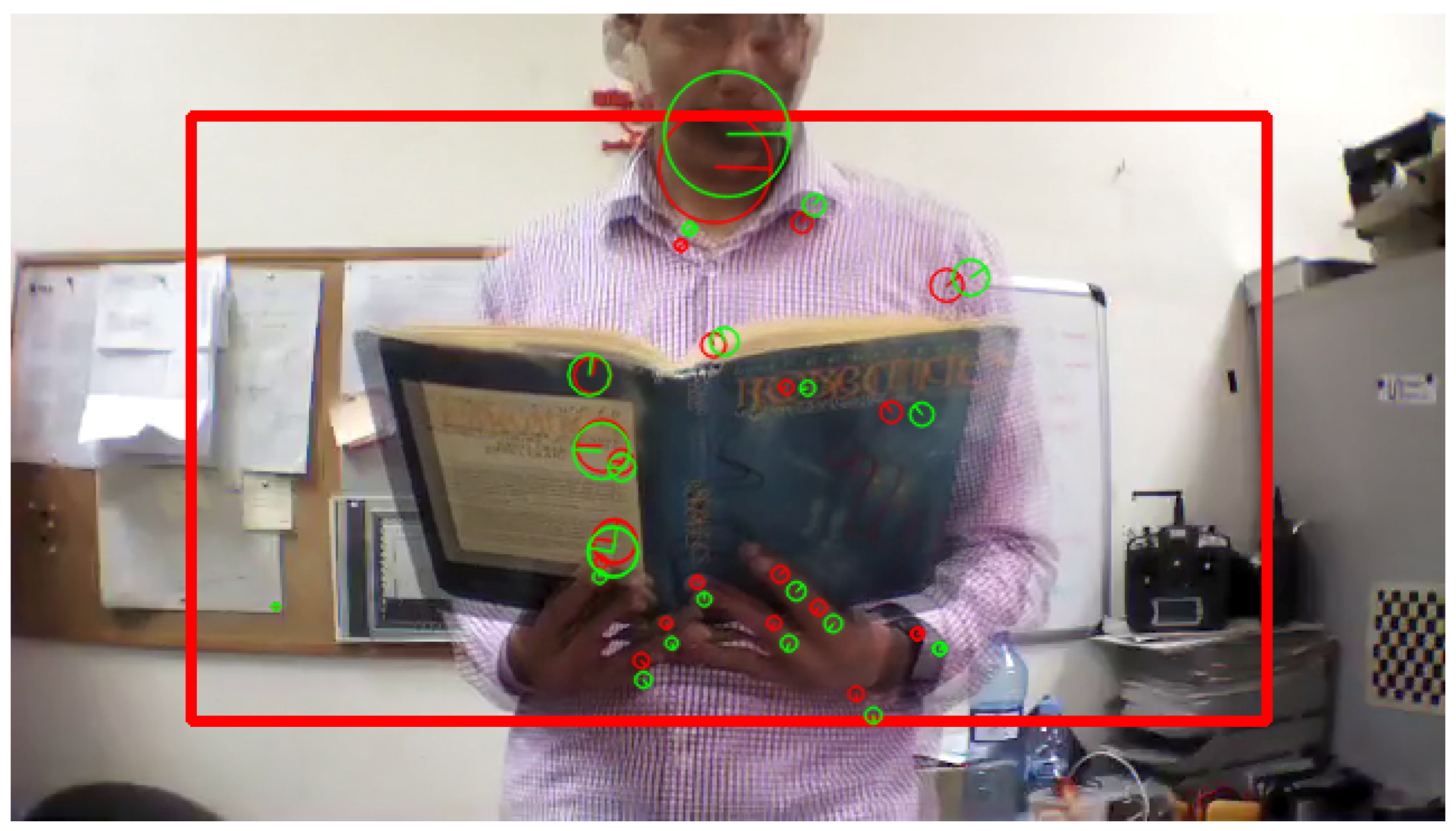
3.2. Object of Interest (OOI)
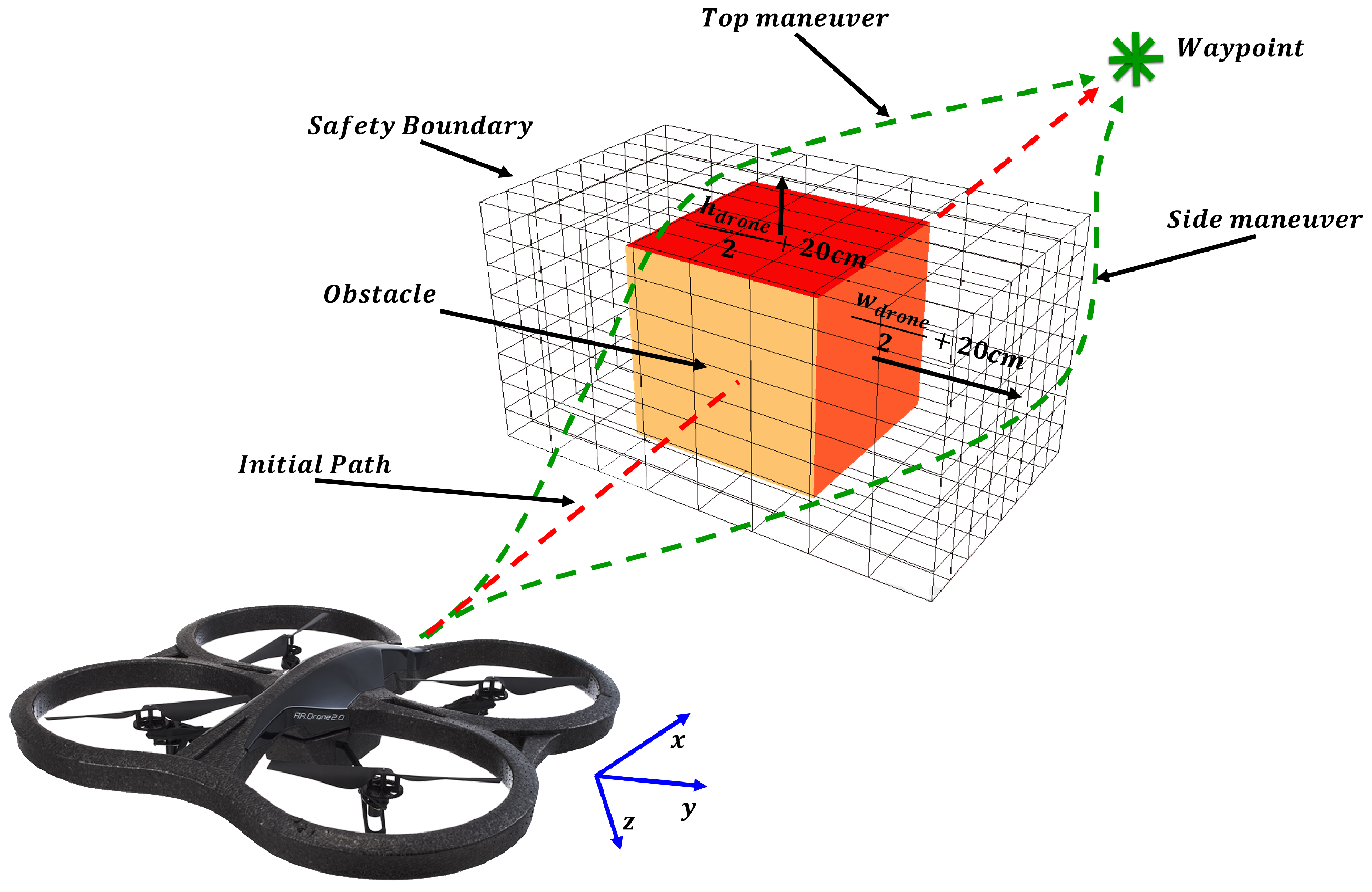
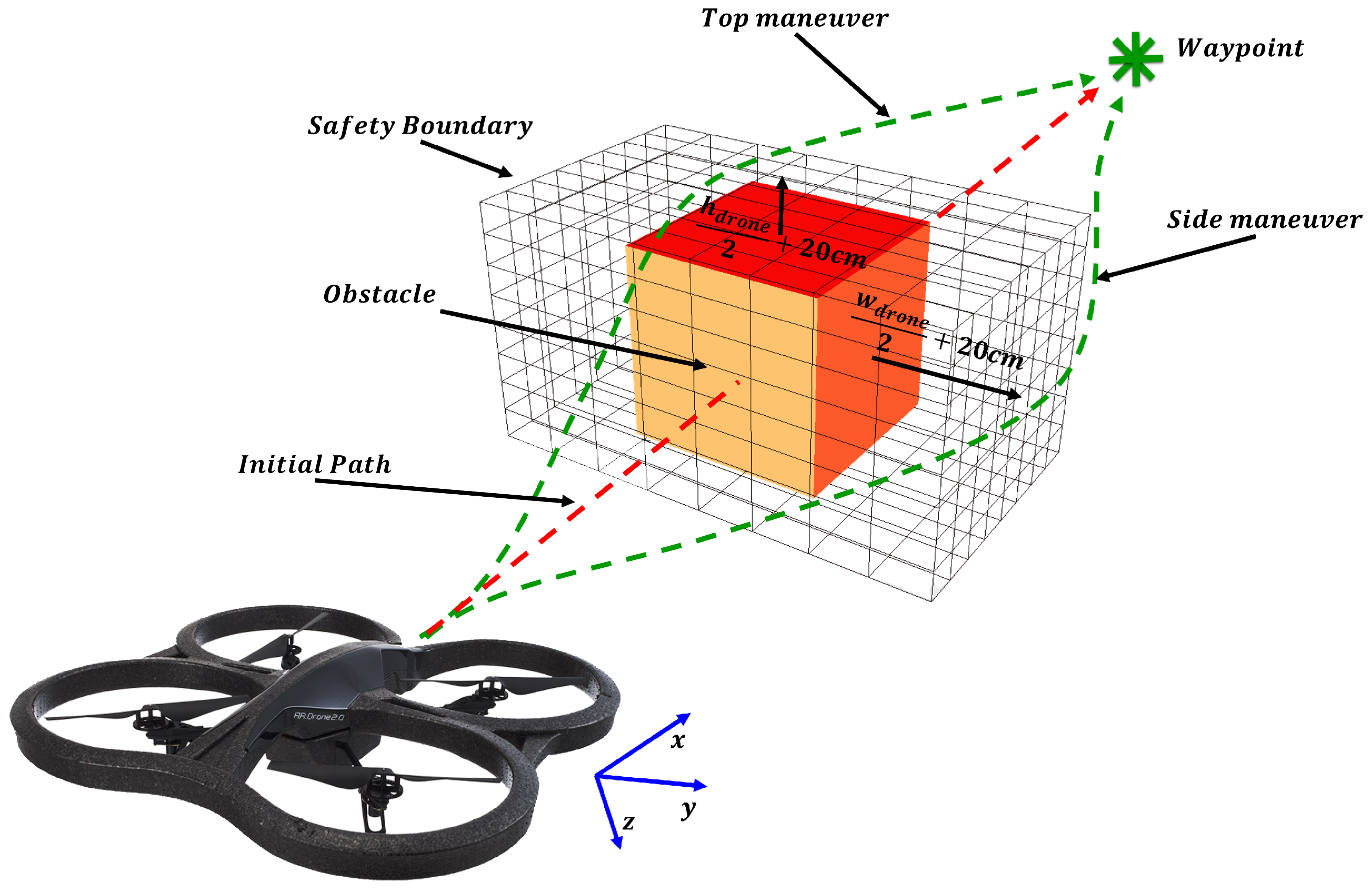
4. Obstacle Avoidance
- Horizontal maneuver (Right or Left)
- Vertical maneuver (Top or bottom)
| Algorithm 3: Obstacle Avoidance Algorithm |
 |
| Algorithm 4: Calculate Avoidance Control |
 |
5. Experimental Results
5.1. Platform
5.2. Scenarios
5.3. Results (Obstacle Detection)
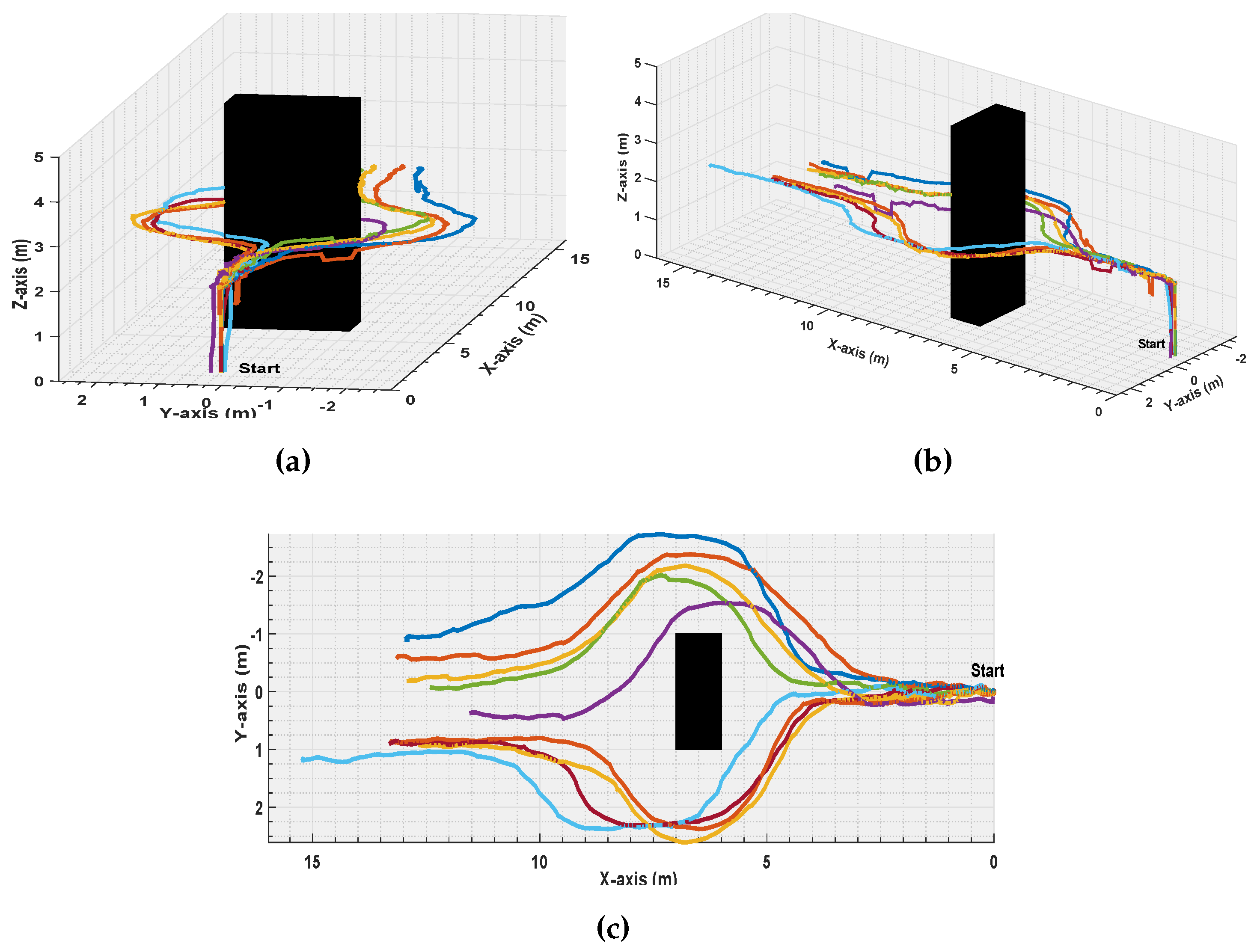
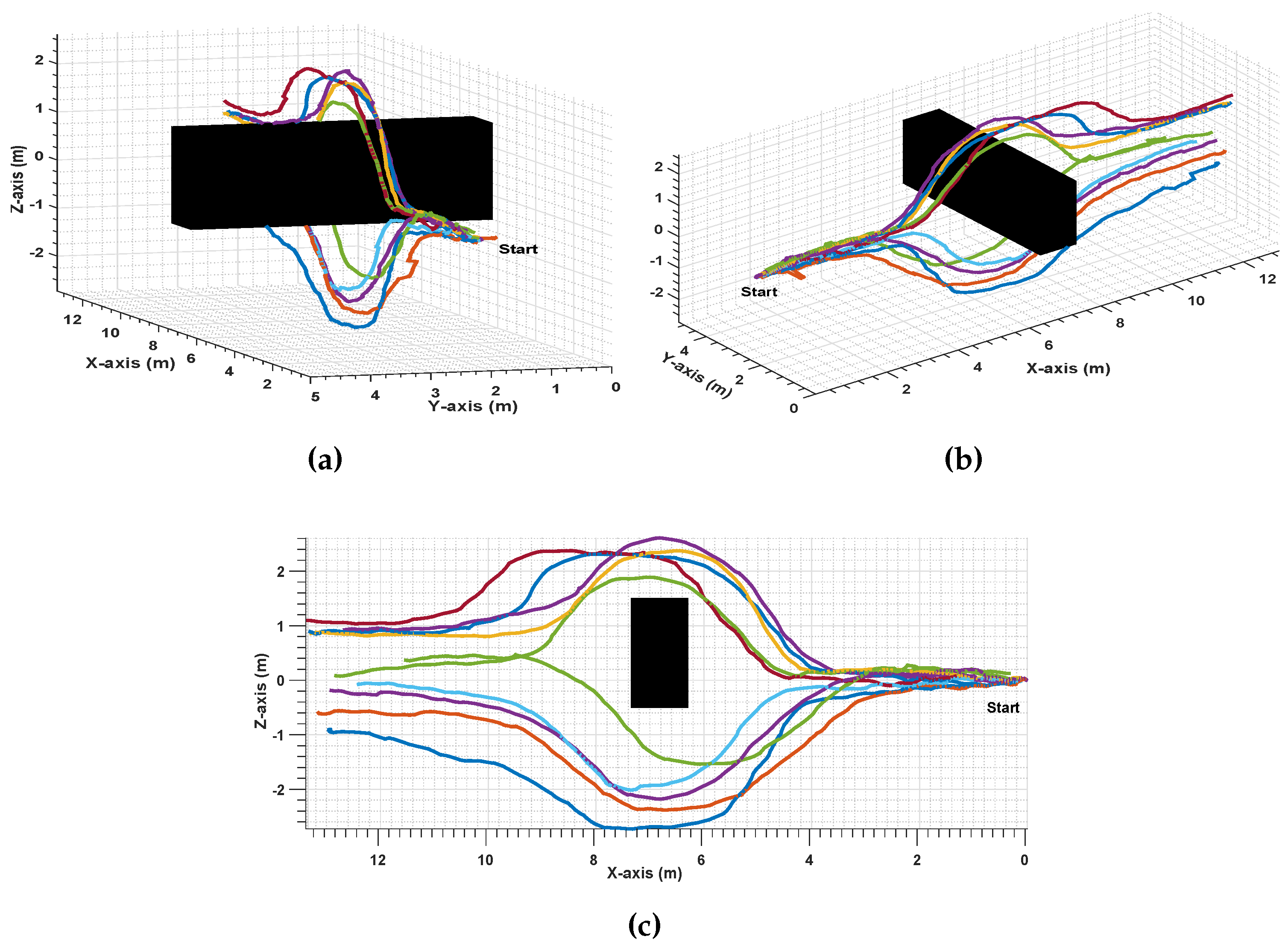
5.4. Results (Obstacle Avoidance)
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Erdos, D.; Erdos, A.; Watkins, S. An experimental UAV system for search and rescue challenge. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 32–37. [Google Scholar] [CrossRef]
- Kamel, B.; Santana, M.C.S.; De Almeida, T.C. Position estimation of autonomous aerial navigation based on Hough transform and Harris corners detection. In Proceedings of the 9th WSEAS International Conference On Circuits, Systems, Electronics, Control & Signal Processing, Athens, Greece, 29–31 December 2010; pp. 148–153. [Google Scholar]
- Fraundorfer, F.; Heng, L.; Honegger, D.; Lee, G.H.; Meier, L.; Tanskanen, P.; Pollefeys, M. Vision-based autonomous mapping and exploration using a quadrotor MAV. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 4557–4564. [Google Scholar]
- Michael, N.; Fink, J.; Kumar, V. Cooperative manipulation and transportation with aerial robots. Auton. Robots 2011, 30, 73–86. [Google Scholar] [CrossRef]
- Eschmann, C.; Kuo, C.M.; Kuo, C.H.; Boller, C. Unmanned aircraft systems for remote building inspection and monitoring. In Proceedings of the 6th European Workshop on Structural Health Monitoring, Dresden, Germany, 2–6 July 2012. [Google Scholar]
- Choi, S.; Kim, E. Image Acquisition System for Construction Inspection Based on Small Unmanned Aerial Vehicle. In Advanced Multimedia and Ubiquitous Engineering; Springer: Heidelberg, Germany, 2015; pp. 273–280. [Google Scholar]
- Bills, C.; Chen, J.; Saxena, A. Autonomous MAV flight in indoor environments using single image perspective cues. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 5776–5783. [Google Scholar]
- Blosch, M.; Weiss, S.; Scaramuzza, D.; Siegwart, R. Vision based MAV navigation in unknown and unstructured environments. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–8 May 2010; pp. 21–28. [Google Scholar]
- Shim, D.; Chung, H.; Sastry, S. Conflict-free navigation in unknown urban environments. IEEE Robot. Autom. Mag. 2006, 13, 27–33. [Google Scholar] [CrossRef]
- Luo, D.; Wang, F.; Wang, B.; Chen, B. Implementation of obstacle avoidance technique for indoor coaxial rotorcraft with Scanning Laser Range Finder. In Proceedings of the 2012 31st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2012; pp. 5135–5140. [Google Scholar]
- Shang, E.; An, X.; Li, J.; He, H. A novel setup method of 3D LIDAR for negative obstacle detection in field environment. In Proceedings of the 2014 IEEE 17th International Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1436–1441. [Google Scholar]
- Ariyur, K.; Lommel, P.; Enns, D. Reactive inflight obstacle avoidance via radar feedback. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 4, pp. 2978–2982. [Google Scholar]
- Broggi, A.; Cattani, S.; Patander, M.; Sabbatelli, M.; Zani, P. A full-3D voxel-based dynamic obstacle detection for urban scenario using stereo vision. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems (ITSC), The Hague, Netherlands, 6–9 October 2013; pp. 71–76. [Google Scholar]
- Gao, Y.; Ai, X.; Rarity, J.; Dahnoun, N. Obstacle detection with 3D camera using U-V-Disparity. In Proceedings of the 2011 7th International Workshop on Systems, Signal Processing and their Applications (WOSSPA), Tipaza, Algeria, 9–11 May 2011; pp. 239–242. [Google Scholar]
- Na, I.; Han, S.H.; Jeong, H. Stereo-based road obstacle detection and tracking. In Proceedings of the 2011 13th International Conference on Advanced Communication Technology (ICACT), PyeongChang, South Korea, 19–22 February 2011; pp. 1181–1184. [Google Scholar]
- Li, J.; Li, X.-M. Vision-based navigation and obstacle detection for UAV. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 1771–1774. [Google Scholar]
- Saha, S.; Natraj, A.; Waharte, S. A real-time monocular vision-based frontal obstacle detection and avoidance for low cost UAVs in GPS denied environment. In Proceedings of the 2014 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology (ICARES), Yogyakarta, Indonesia, 13–14 November 2014; pp. 189–195. [Google Scholar]
- Majumder, S.; Shankar, R.; Prasad, M. Obstacle size and proximity detection using stereo images for agile aerial robots. In Proceedings of the 2015 2nd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, Delhi-NCR, India, 19–20 February 2015; pp. 437–442. [Google Scholar]
- Merrell, P.C.; Lee, D.J.; Beard, R.W. Obstacle avoidance for unmanned air vehicles using optical flow probability distributions. Mob. Robots XVII 2004, 5609, 13–22. [Google Scholar]
- Hrabar, S.; Sukhatme, G.; Corke, P.; Usher, K.; Roberts, J. Combined optic-flow and stereo-based navigation of urban canyons for a UAV. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 3309–3316. [Google Scholar]
- Beyeler, A.; Zufferey, J.C.; Floreano, D. 3D Vision-based Navigation for Indoor Microflyers. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1336–1341. [Google Scholar]
- Celik, K.; Chung, S.J.; Clausman, M.; Somani, A. Monocular vision SLAM for indoor aerial vehicles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1566–1573. [Google Scholar]
- Chavez, A.; Gustafson, D. Vision-based obstacle avoidance using SIFT features. In Proceedings of the 5th International Symposium on Advances in Visual Computing: Part II, ISVC’09, Las Vegas, NV, USA, 30 November–2 December 2009; Springer: Berlin, Heidelberg, 2009; pp. 550–557. [Google Scholar]
- Mori, T.; Scherer, S. First results in detecting and avoiding frontal obstacles from a monocular camera for micro unmanned aerial vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 1750–1757. [Google Scholar]
- Shirai, N.; Yamaguchi, M.K. Asymmetry in the perception of motion-in-depth. Vis. Res. 2004, 44, 1003–1011. [Google Scholar] [CrossRef] [PubMed]
- Gibson, J.J. The Ecological Approach to Visual Perception: Classic Edition; Psychology Press: Boston, MA, USA, 2014. [Google Scholar]
- De Croon, G.; de Weerdt, E.; De Wagter, C.; Remes, B. The appearance variation cue for obstacle avoidance. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO), Tianjin, China, 14–18 December 2010; pp. 1606–1611. [Google Scholar]
- Green, W.; Oh, P. Optic-Flow-Based Collision Avoidance. IEEE Robot. Autom. Mag. 2008, 15, 96–103. [Google Scholar] [CrossRef]
- Lee, J.O.; Lee, K.H.; Park, S.H.; Im, S.G.; Park, J. Obstacle avoidance for small UAVs using monocular vision. Aircr. Eng. Aerosp. Technol. 2011, 83, 397–406. [Google Scholar] [CrossRef]
- Ma, Z.; Hu, T.; Shen, L.; Kong, W.; Zhao, B. A detection and relative direction estimation method for UAV in sense-and-avoid. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Gothenburg, Sweden, 24–28 August 2015; pp. 2677–2682. [Google Scholar]
- Byrne, J.; Taylor, C.J. Expansion segmentation for visual collision detection and estimation. In Proceedings of the International Conference on Robotics and Automation (ICRA’09), Kobe, Japan, 6–7 August 2009; pp. 875–882. [Google Scholar]
- Kim, J.; Do, Y. Moving Obstacle Avoidance of a Mobile Robot Using a Single Camera. Procedia Eng. 2012, 41, 911–916. [Google Scholar] [CrossRef]
- Kendoul, F. A Survey of Advances in Guidance, Navigation and Control of Unmanned Rotorcraft Systems. J. Field Rob. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Yu, X.; Zhang, Y. Sense and avoid technologies with applications to unmanned aircraft systems: Review and prospects. Prog. Aerosp. Sci. 2015, 74, 152–166. [Google Scholar] [CrossRef]
- Mcfadyen, A.; Mejias, L. A survey of autonomous vision-based See and Avoid for Unmanned Aircraft Systems. Prog. Aerosp. Sci. 2016, 80, 1–17. [Google Scholar] [CrossRef]
- Krajnik, T.; Vonasek, V.; Fiser, D.; Faigl, J. AR-drone as a platform for robotic research and education. In Research and Education in Robotics-EUROBOT; Springer: Berlin/Heidelberg, Germany, 2011; pp. 172–186. [Google Scholar]
- Schmidt, A.; Kraft, M.; Fularz, M.; Domagala, Z. The comparison of point feature detectors and descriptors in the context of robot navigation. J. Autom. Mob. Robot. Intell. Syst. 2013, 7, 11–20. [Google Scholar]
- Jeong, C.Y.; Choi, S. A comparison of keypoint detectors in the context of pedestrian counting. Proceedigns of the 2016 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 31 July–26 August 2016; pp. 1179–1181. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indoor | Outdoor | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| People | Obstacle | Pillar | Wall | People | Obstacle | Tree | Wall | Total | |
| Situated | 200 | 110 | 80 | 80 | 200 | 120 | 140 | 70 | 1000 |
| Detected | 196 | 107 | 79 | 76 | 196 | 116 | 135 | 69 | 974 |
| Fail | 4 | 3 | 1 | 4 | 4 | 4 | 5 | 1 | 26 |
| Accuracy (%) | |||||||||
| Object | 98.0 | 97.3 | 98.8 | 95.0 | 98.0 | 96.7 | 96.4 | 98.6 | 97.4 |
| Environment | 97.3 | 97.4 | |||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Kaff, A.; García, F.; Martín, D.; De La Escalera, A.; Armingol, J.M. Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs. Sensors 2017, 17, 1061. https://doi.org/10.3390/s17051061
Al-Kaff A, García F, Martín D, De La Escalera A, Armingol JM. Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs. Sensors. 2017; 17(5):1061. https://doi.org/10.3390/s17051061
Chicago/Turabian StyleAl-Kaff, Abdulla, Fernando García, David Martín, Arturo De La Escalera, and José María Armingol. 2017. "Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs" Sensors 17, no. 5: 1061. https://doi.org/10.3390/s17051061
APA StyleAl-Kaff, A., García, F., Martín, D., De La Escalera, A., & Armingol, J. M. (2017). Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs. Sensors, 17(5), 1061. https://doi.org/10.3390/s17051061