
A Unified Model for BDS Wide Area and Local Area Augmentation Positioning Based on Raw Observations

 ,
,
Abstract
:1. Introduction
2. The PPP Solution Model Based on Raw Observations
2.1. A priori Constraint
2.2. Spatial Constraint
2.3. Temporal Constraint
2.4. The PPP Model
3. The URTK Solution Model Based on Raw Observations
3.1. The Baseline Solution Model for the Reference Stations with Raw Observations
3.2. The Retrieval of the Un-Differenced Observation Corrections
3.3. The Interpolation of the UD Observation Corrections
3.4. The URTK Model
4. The Integration of PPP and URTK Based on Raw Observations
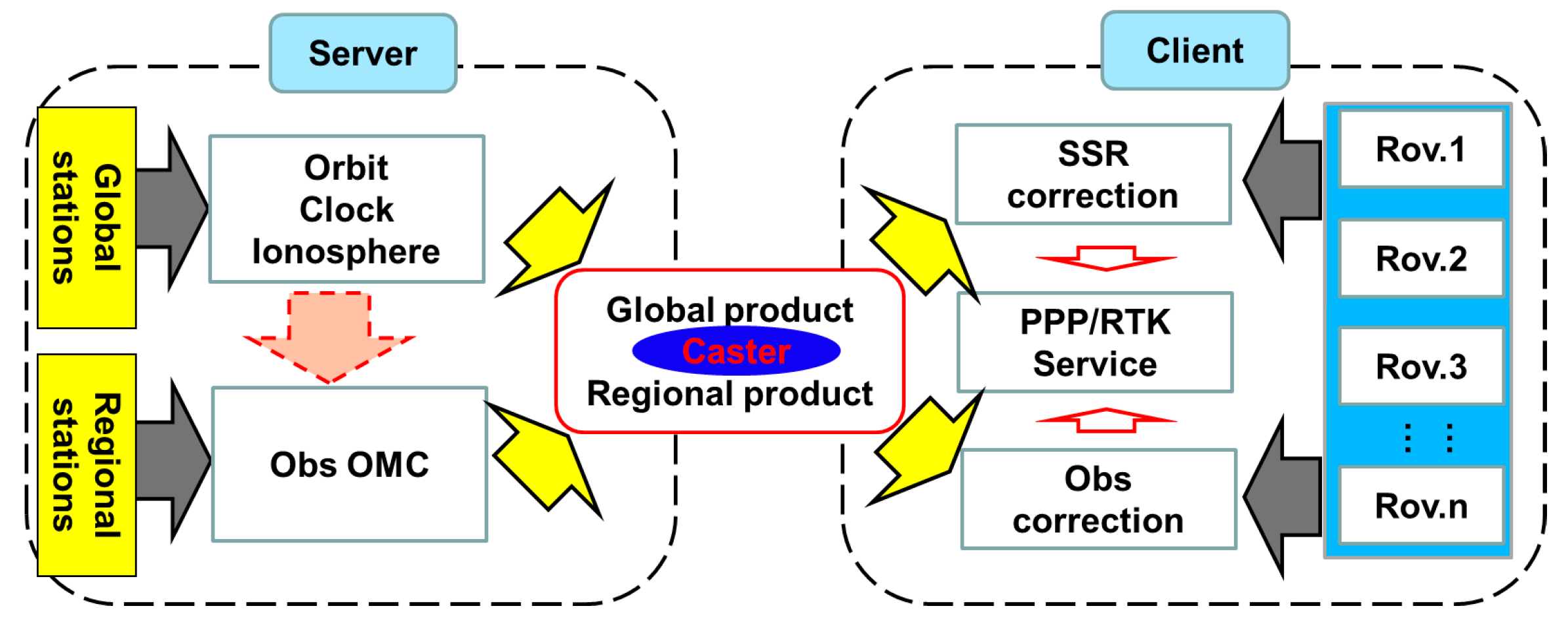
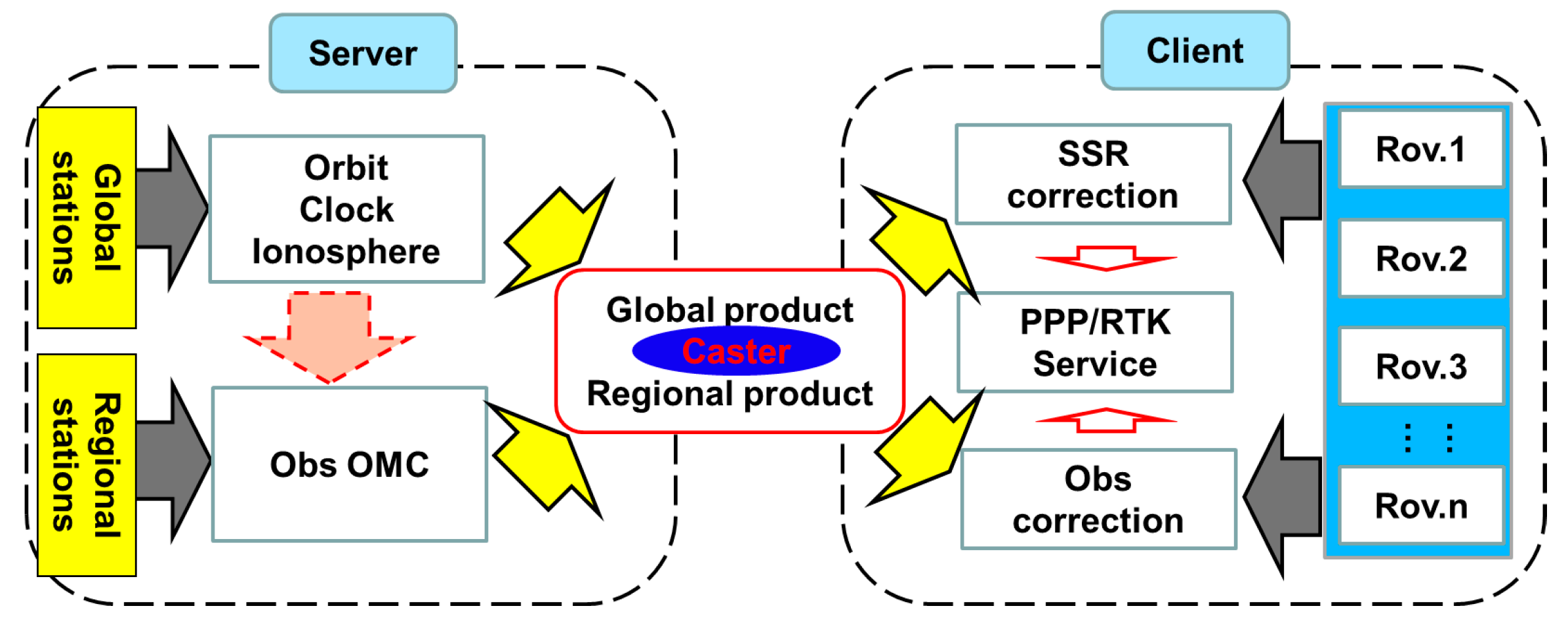
4.1. An Integrated Model
4.2. Data Processing Flow
5. Validations and Results
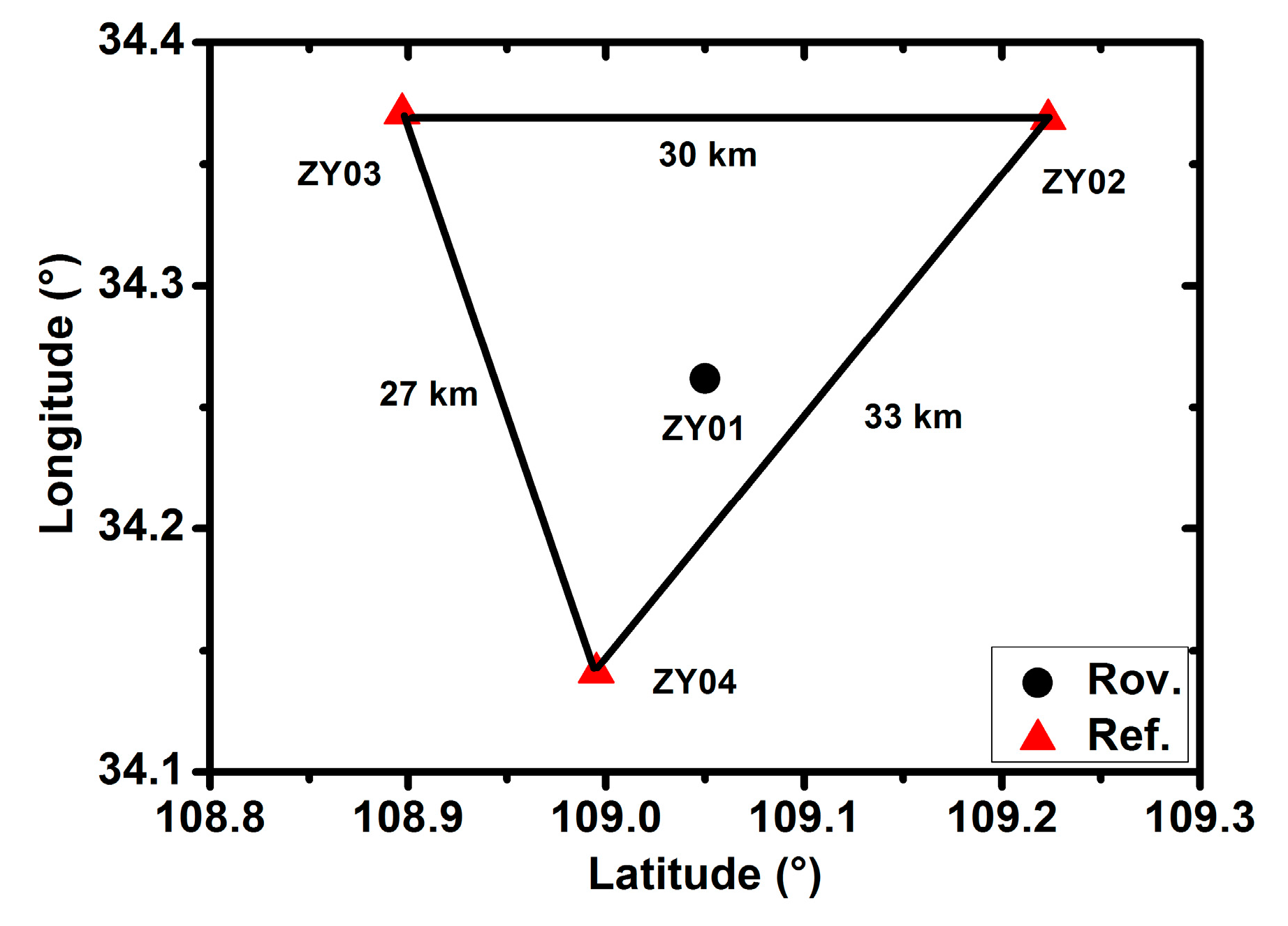
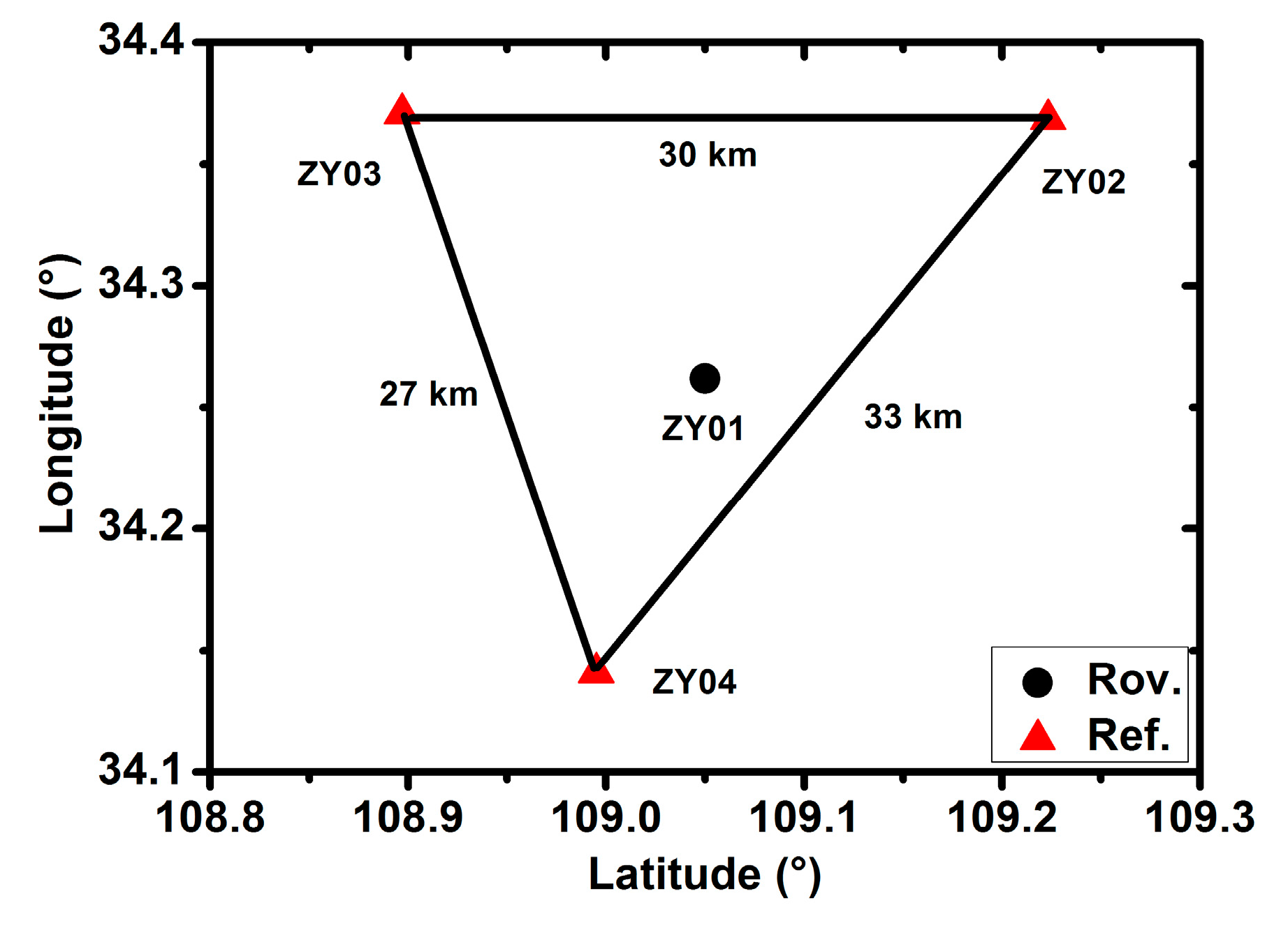
5.1. Data Description
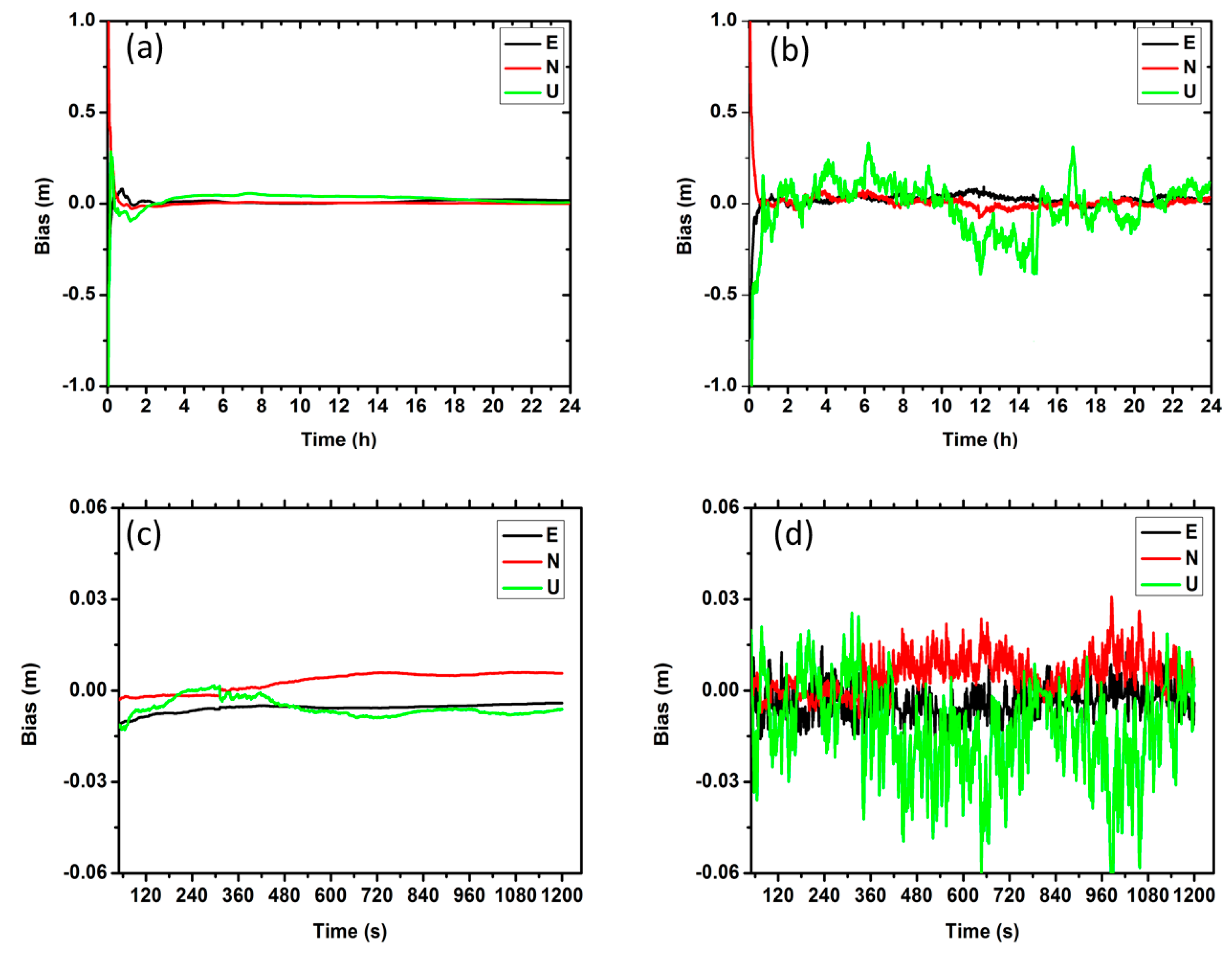
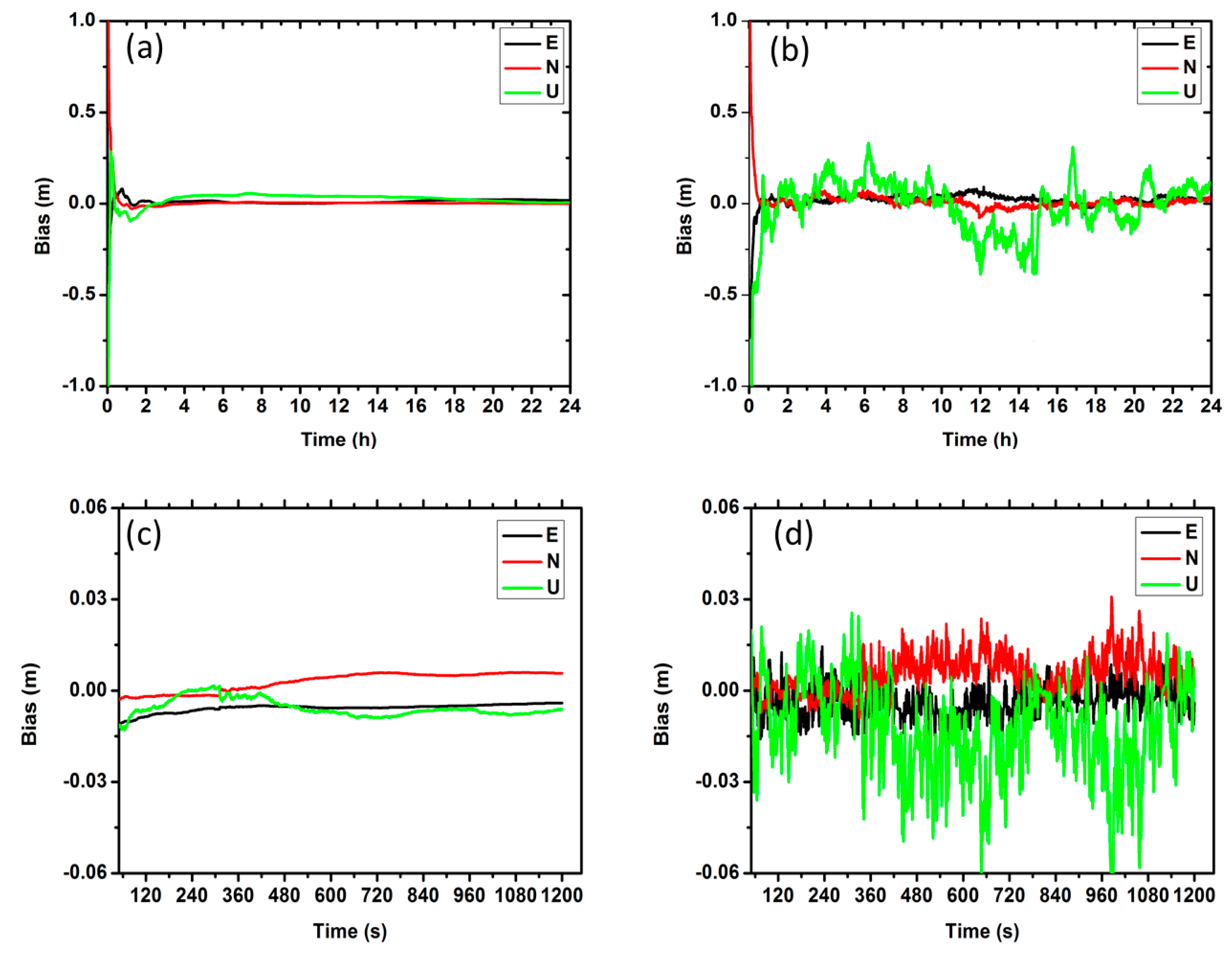
5.2. Accuracy Validation
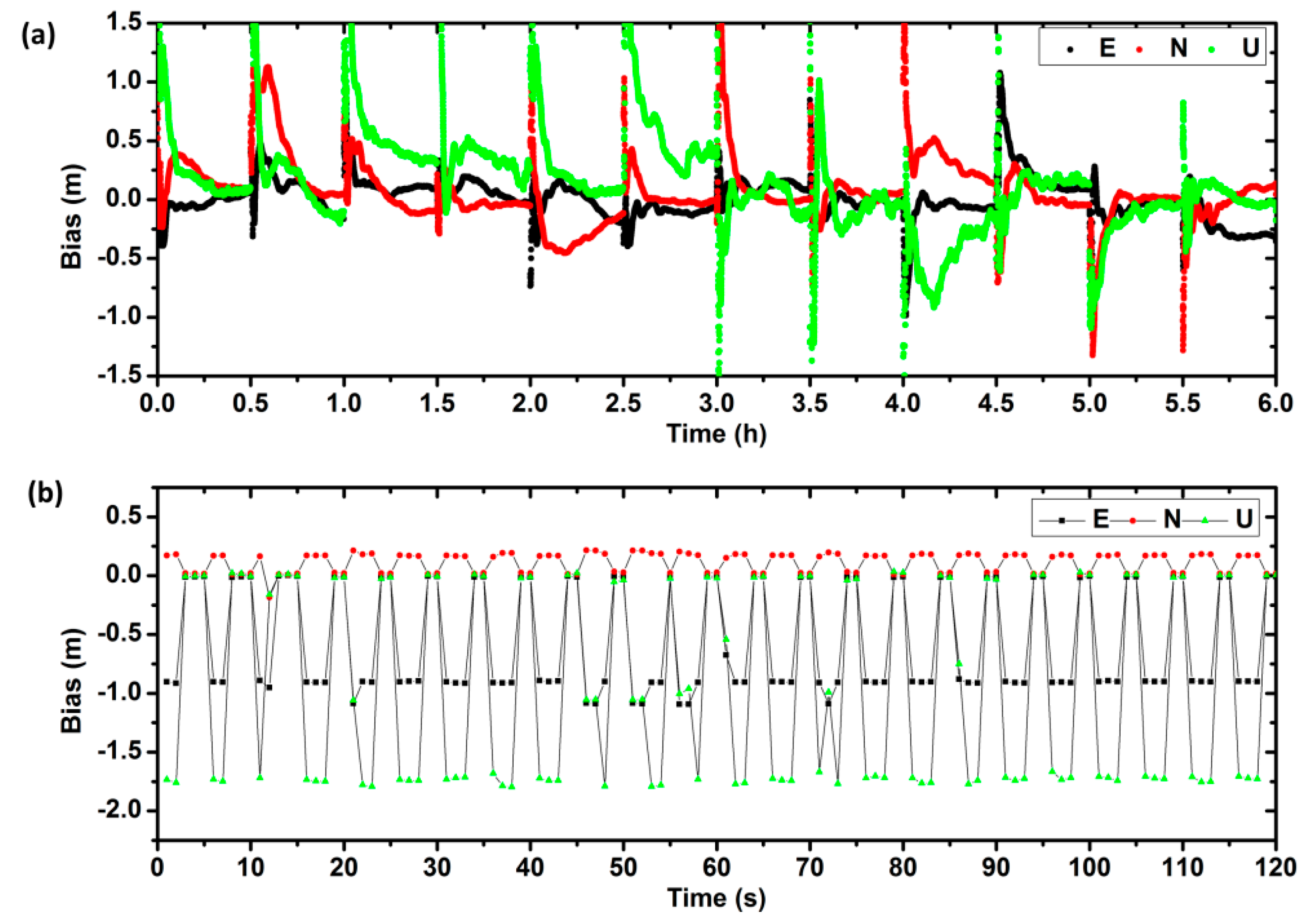
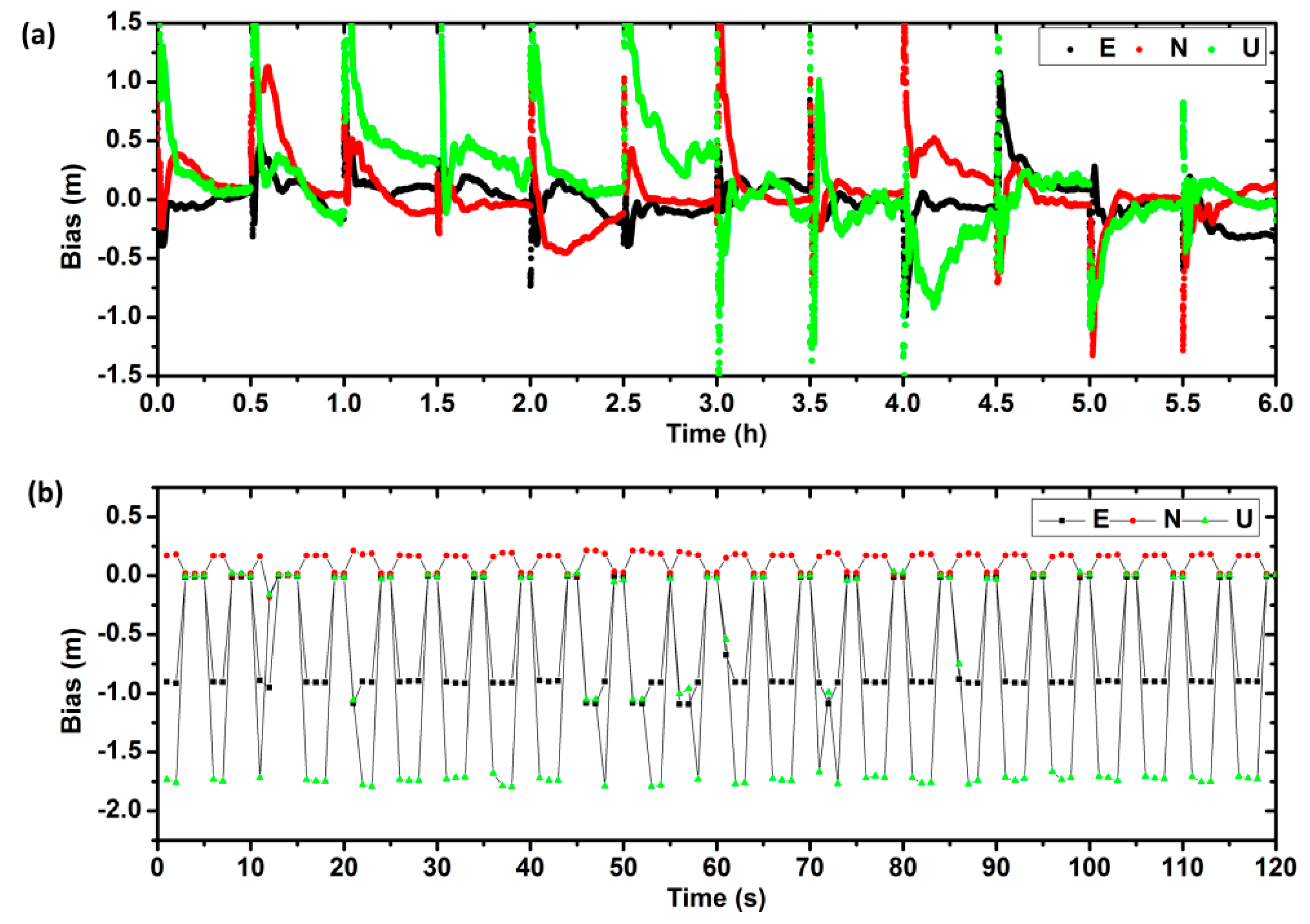
5.3. Convergence Time
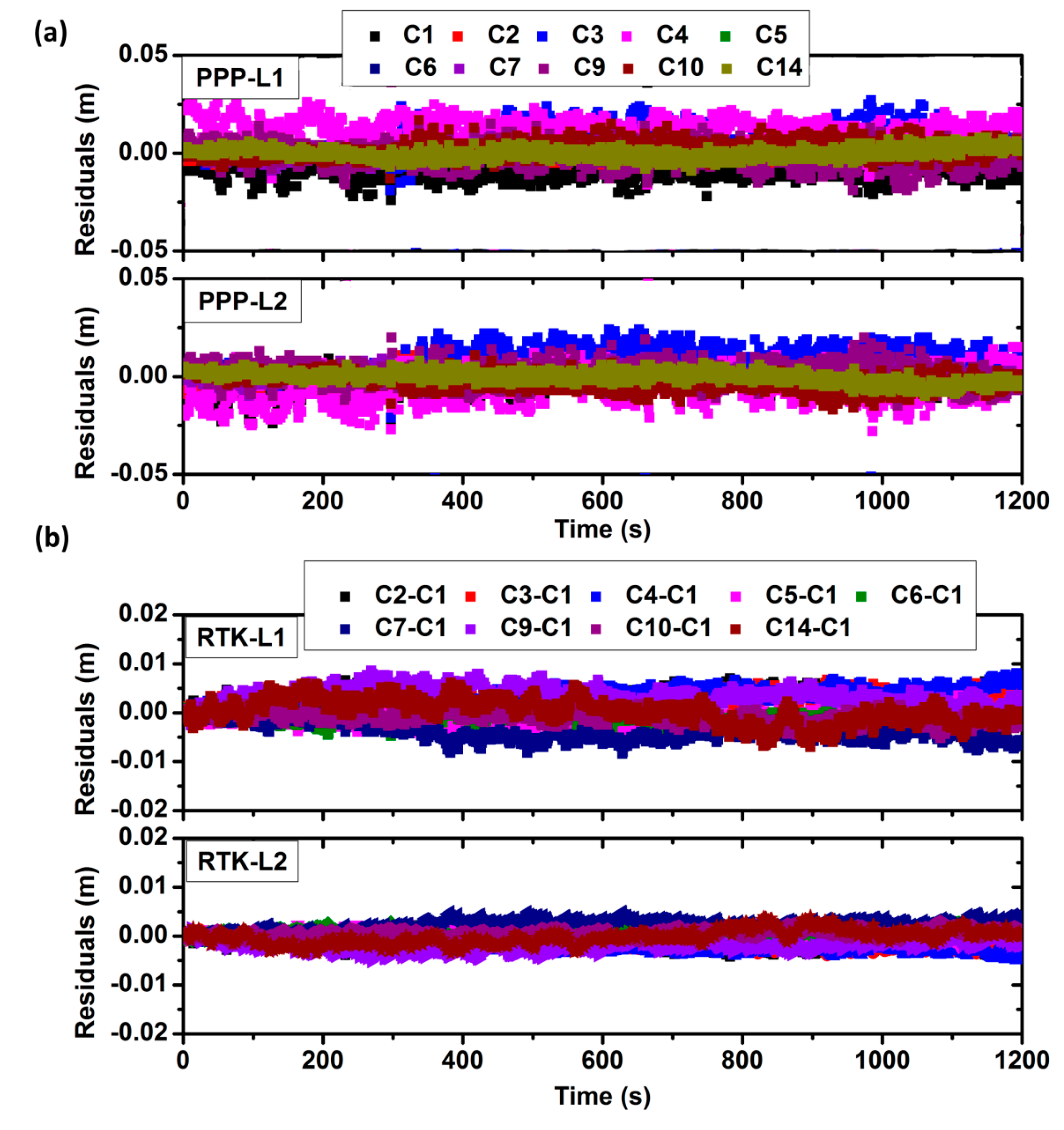
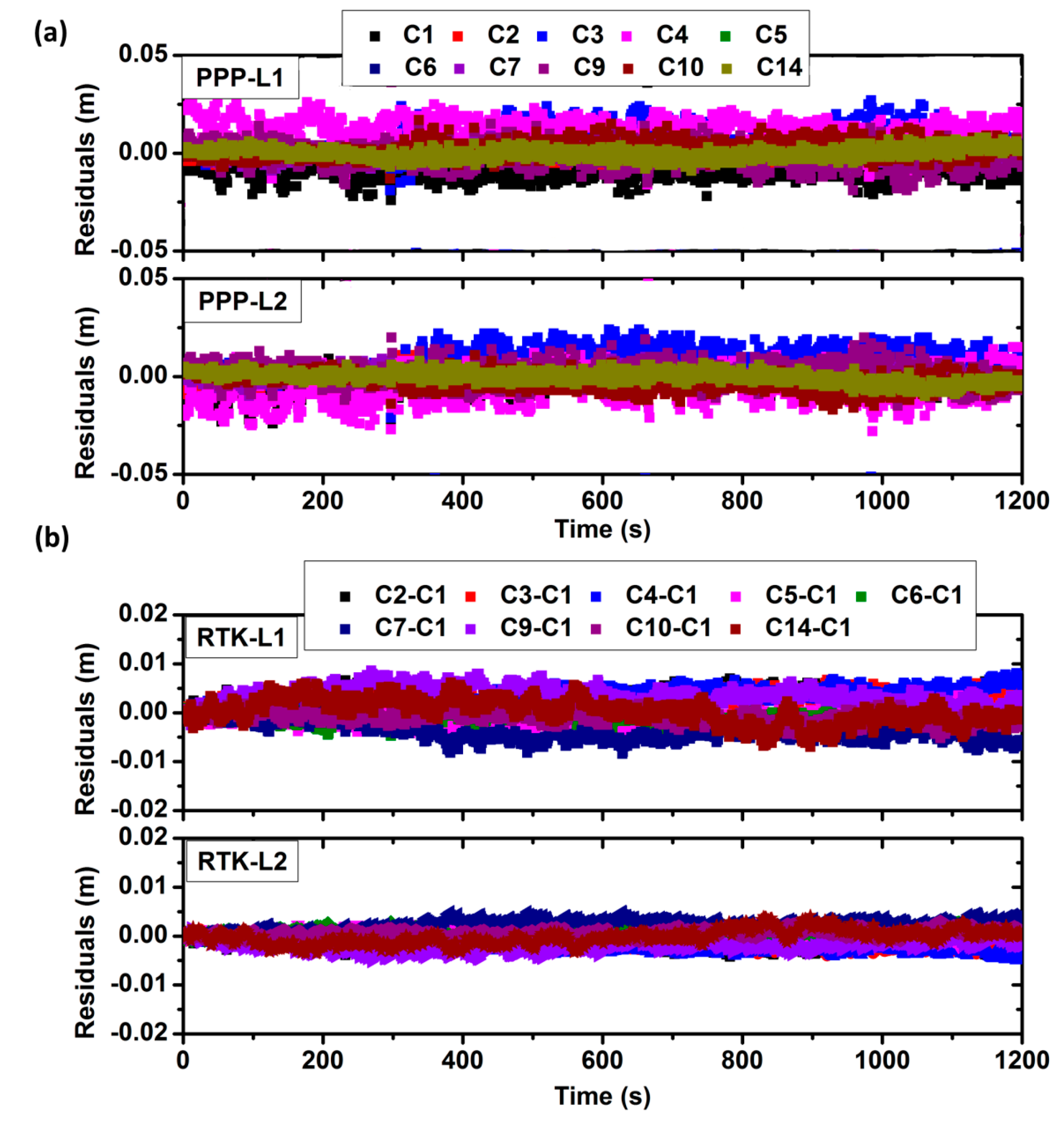
5.4. Observation Residuals
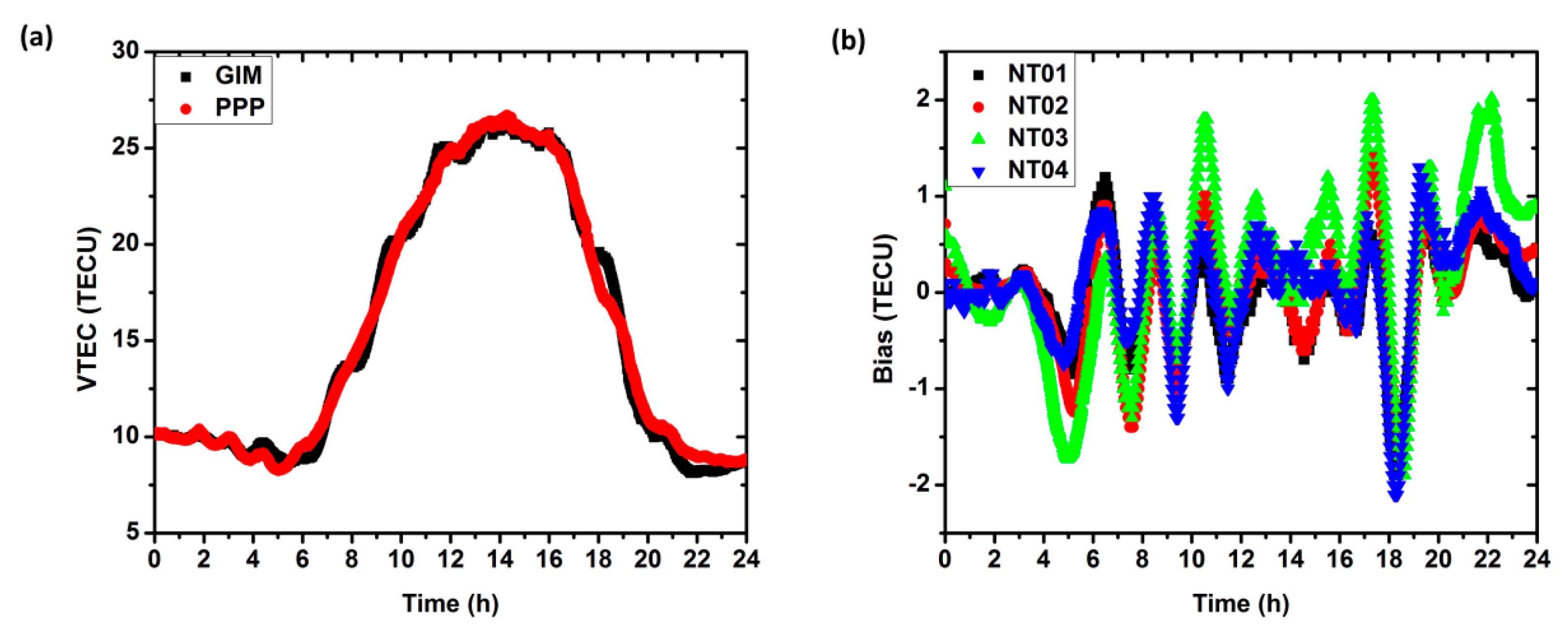
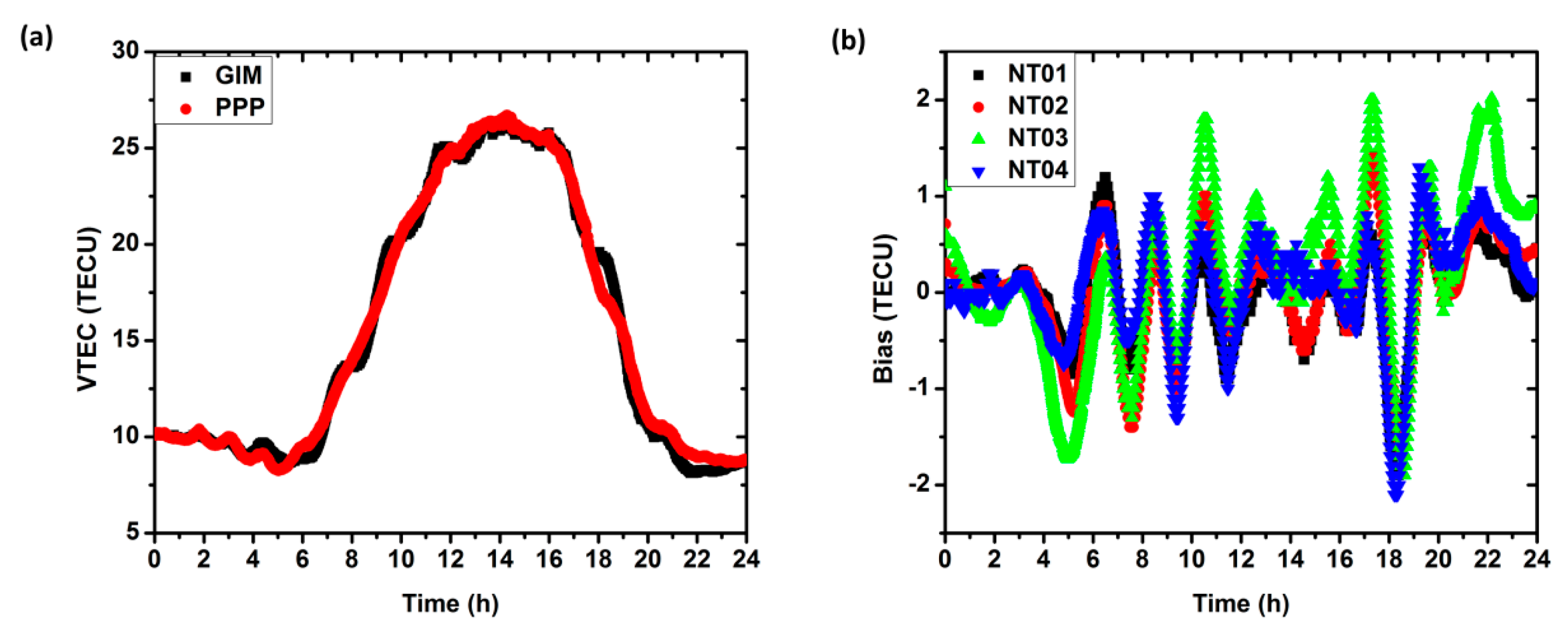
5.5. Ionospheric Delay
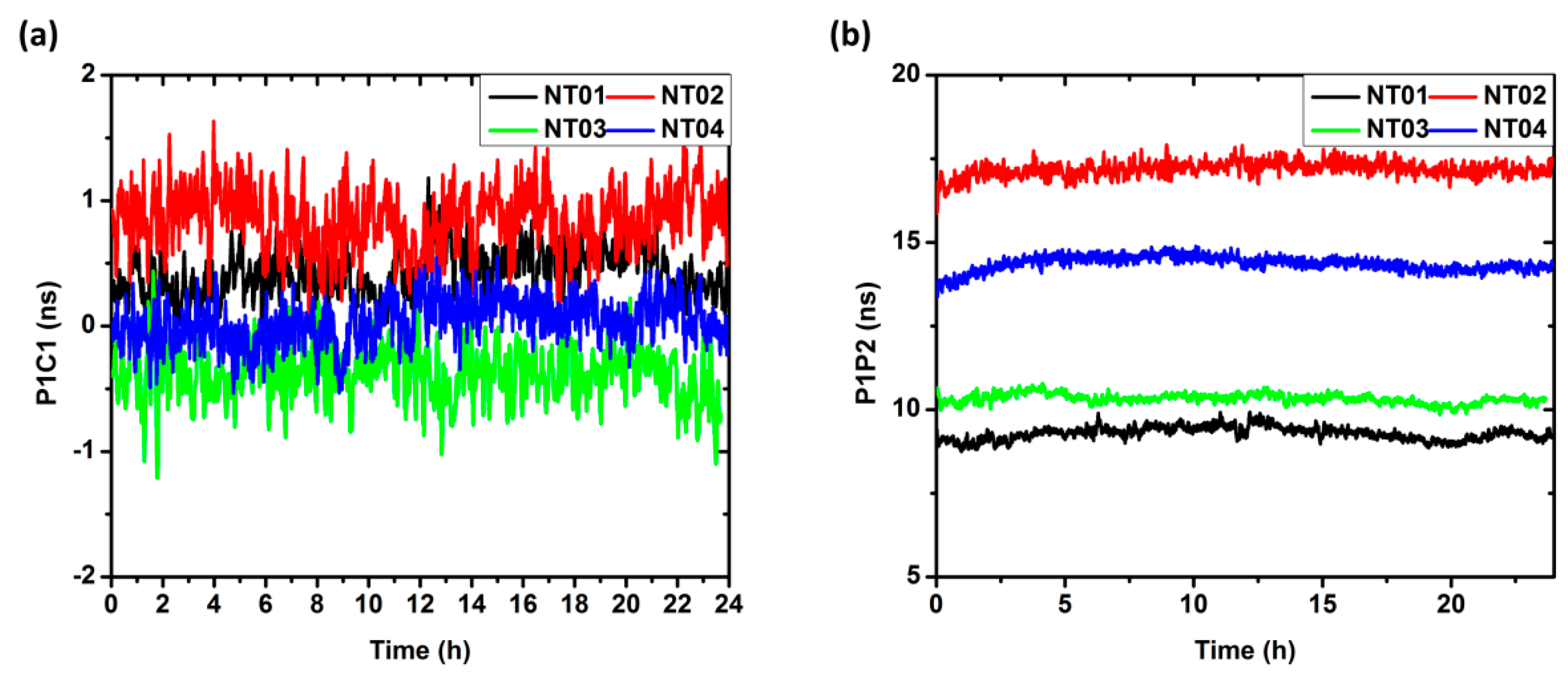
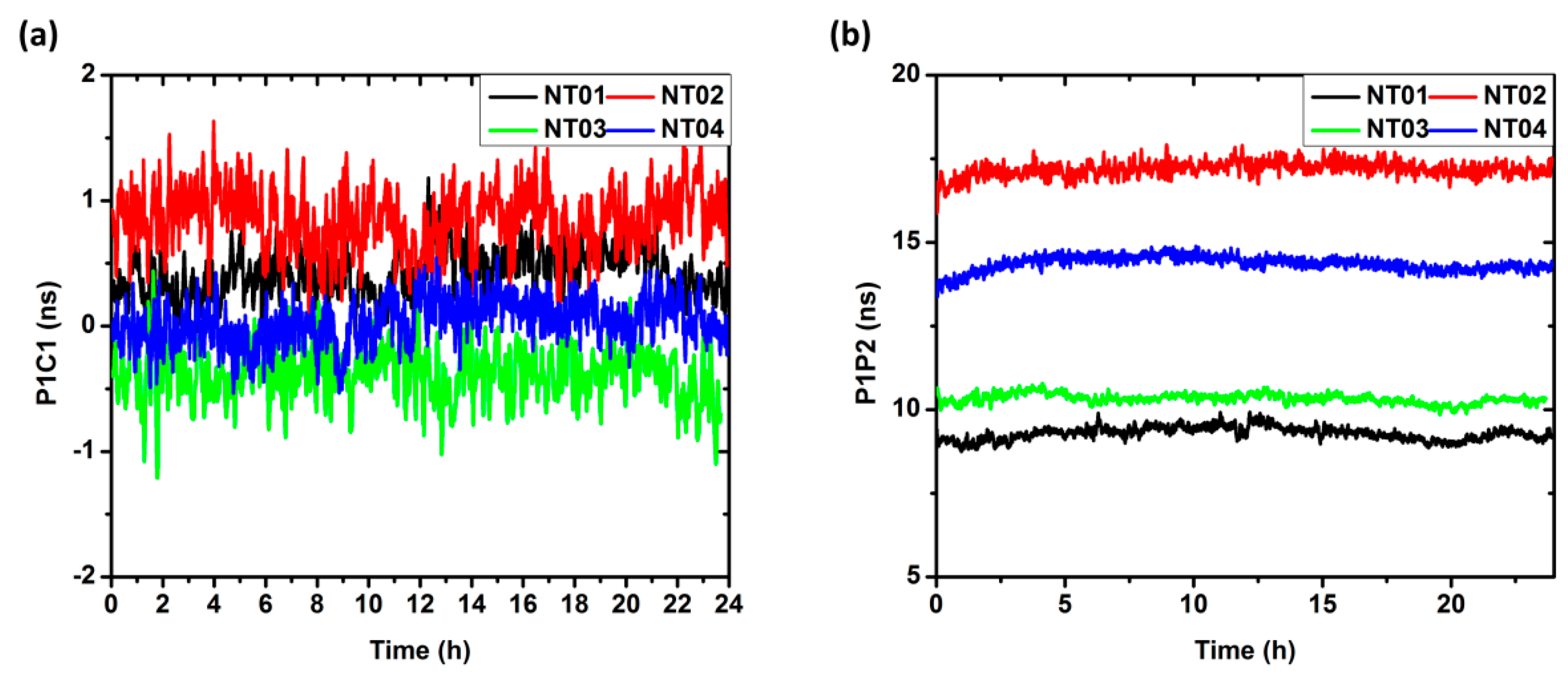
5.6. Analysis of Receiver DCB
6. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dong, D.N.; Bock, Y. Global Positioning System network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J. Geophys. Res. 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Blewitt, G. Carrier phase ambiguity resolution for the Global Positioning System applied to geodetic baselines up to 2000 km. J. Geophys. Res. 1989, 94, 10187–10203. [Google Scholar] [CrossRef]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real-time strong-motion broadband displacements from collocated GPS and accelerometers. Bull. Seism. Soc. Am. 2011, 101, 2904–2925. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M. Precise Point Positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Bar-Sever, Y.; Blewitt, G.; Gross, R.S.; Hammond, W.C.; Hsu, V.; Hudnut, K.W.; Khachikyan, R.; Kreemer, C.W.; Meyer, R.; Plag, H.P.; et al. A GPS Real Time Earthquake and Tsunami (GREAT) alert system. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 14–18 December 2009.
- Wright, T.J.; Houli´e, N.; Hildyard, M.; Iwabuchi, T. Real-time, reliable magnitudes for large earthquakes from 1 Hz GPS Precise Point Positioning: The 2011 Tohoku-Oki (Japan) earthquake. Geophys. Res. Lett. 2012, 39, L12302. [Google Scholar] [CrossRef]
- Li, X.; Dick, G.; Ge, M.; Heise, S.; Wickert, J.; Bender, M. Real-time GPS sensing of atmospheric water vapor: Precise point positioning with orbit, clock, and phase delay corrections. Geophys. Res. Lett. 2014, 41, 3615–3621. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Feng, Y. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J. Geod. 2008, 82, 847–862. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.; Ge, M.; Teferle, F. Rapid reconvergences to ambiguity-fixed solutions in precise point positioning. J. Geod. 2010, 84, 705–714. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, X.H.; Wickert, J. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geod. 2013, 87, 405–416. [Google Scholar] [CrossRef]
- Geng, J.; Teferle, F.N.; Meng, X.; Dodson, A.H. Towards PPP-RTK: Ambiguity resolution in real-time precise point positioning. Adv. Space Res. 2011, 47, 1664–1673. [Google Scholar] [CrossRef]
- Geng, J.; Shi, C.; Ge, M.; Dodson, A.H.; Lou, Y.; Zhao, Q.; Liu, J. Improving the estimation of fractional-cycle biases for ambiguity resolution in precise point positioning. J. Geod. 2012, 86, 579–589. [Google Scholar] [CrossRef]
- Geng, J.; Shi, C. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J. Geod. 2016. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, S.; Song, W.; Lou, Y.; Chen, D. Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut. 2016. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Kalman filter based integer ambiguity resolution strategy for long-baseline RTK with ionosphere and troposphere estimation. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010; pp. 161–171.
- Yanase, T.; Tanaka, H.; Ohashi, M.; Kubo, Y.; Sugimoto, S. Long baseline relative positioning with estimating ionosphere and troposphere gradients. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010; pp. 196–206.
- Dai, L.; Eslinger, D.; Sharpe, T. Innovative algorithms to improve long range RTK reliability and availability. In Proceedings of the ION National Technical Meeting, San Diego, CA, USA, 28–30 January 2007; pp. 860–872.
- Fotopoulos, G.; Cannon, M.E. An overview of multi-reference station methods for cm-level positioning. GPS Solut. 2001, 4, 1–10. [Google Scholar] [CrossRef]
- Musa, T.A.; Lim, S.; Rizos, C. GPS network-based approach to mitigate residual tropospheric delay in low latitude area. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005; pp. 2606–2613.
- Snay, R.A.; Soler, T.M. Continuously Operating Reference Station (CORS): History, Applications, and Future Enhancements. J. Surv. Eng. 2008, 134, 95–104. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.A.; Kashani, I.; Wielgosz, P. On accuracy and reliability of instantaneous network RTK as a function of network geometry, station separation, and data processing strategy. GPS Solut. 2005, 9, 212–225. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.A.; Arslan, N.; Wielgosz, P.; Hong, C.K. Network calibration for unfavorable reference-rover geometry in network-based RTK: Ohio CORS case study. J. Surv. Eng. ASCE 2009, 135, 90–100. [Google Scholar] [CrossRef]
- Rizos, C. Alternatives to current GPS-RTK services and some implications for CORS infrastructure and operations. GPS Solut. 2007, 11, 151–158. [Google Scholar] [CrossRef]
- Ge, M.; Zou, X.; Dick, G.; Jiang, W.P.; Wickert, J.; Liu, J.N. An alternative network RTK approach based on undifferenced observation corrections. In Proceedings of the ION GNSS 2010, Institute of Navigation, Portland, OR, USA, 21–24 September 2010; pp. 21–24.
- Teunissen, P.J.G.; Odijk, D.; Zhang, B. PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution. J. Aeronaut. Astronaut. Aviat. Ser. A 2010, 42, 223–230. [Google Scholar]
- Li, X.; Zhang, X.H.; Ge, M.R. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geod. 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Zou, X.; Ge, M.; Tang, W.; Shi, C.; Liu, J. URTK: Undifferenced network RTK positioning. GPS Solut. 2013, 17, 283–293. [Google Scholar] [CrossRef]
- Zou, X.; Tang, W.; Shi, C.; Liu, J.N. Instantaneous ambiguity resolution for URTK and its seamless transition with PPP-AR. GPS Solut. 2015, 19, 559–567. [Google Scholar] [CrossRef]
- Schonemann, E.; Becker, M.; Springer, T. A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J. Geod. 2011, 1, 204–214. [Google Scholar] [CrossRef]
- Zhang, B.; Ou, J.; Yuan, Y.; Li, Z. Calibration of slant total electron content and satellite-receiver’s differential code biases with uncombined precise point positioning (PPP) technique. Acta Geodaeticaet Cartographica Sinica 2011, 40, 447–453. [Google Scholar]
- Tu, R.; Ge, M.; Zhang, H.; Huang, G. The realization and convergence analysis of combined PPP based on raw observation. Adv. Space Res. 2013, 52, 211–221. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Douša, J.; Wickert, J. Real-time precise point positioning regional augmentation for large GPS reference networks. GPS Solut. 2014, 18, 61–71. [Google Scholar] [CrossRef]
- Gu, S.; Lou, Y.; Shi, C.; Liu, J. BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J. Geod. 2015, 89, 979–992. [Google Scholar] [CrossRef]
- Yang, Y.; Li, J.; Wang, A. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci. China Earth Sci. 2014, 57, 144–152. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Bilitza, D. International Reference Ionosphere 2000. Radio Sci. 2001, 36, 261–275. [Google Scholar] [CrossRef]
- Bent, R.; Llewellyn, S.; Schmid, P.A. Highly Successful Empirical Model for the Worldwide Ionospheric Electron Density Profile; DBA Systems: Melbourne, FL, USA, 1972. [Google Scholar]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. AES 1987, 23, 325–331. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, H.; Ge, M.; Huang, G. A real-time ionospheric model based on GNSS Precise Point Positioning. Adv. Space Res. 2013, 52, 1125–1134. [Google Scholar] [CrossRef]
- Bock, H.; Hugentobler, U.; Beutler, G. Kinematic and dynamic determination of trajectories for low Earth satellites using GPS. In First CHAMP Mission Results for Gravity, Magnetic and Atmospheric Studies; Reigber, C., Luhr, H., Schwintzer, P., Eds.; Springer: Heidelberg, Germany, 2003; pp. 65–69. [Google Scholar]
- Dach, R.; Hungentobler, U.; Fridez, P.; Michael, M. Bernese GPS Software Version 5.0; Astronomical Institute, University of Bern: Bern, Switzerland, 2007. [Google Scholar]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.; Rothacher, M. Generation of a Consistent Absolute Phase Center Correction Model for GPS Receiver and Satellite Antennas; Springer: Berlin, Germany, 2007. [Google Scholar]
- Teunissen, P.J.G. The least squares ambiguity decorrelation adjustment: A method for fast GPS integer estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Janssen, V.; McElroy, S. Virtual RINEX: Science or fiction? Position 2013, 67, 38–41. [Google Scholar]
- Dabove, P.; Cina, A.; Manzino, A.M. How reliable is a Virtual RINEX? In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 255–262.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Group 1 | Group 2 | Group 3 | No. |
|---|---|---|---|---|
| BDS | , | 3 × N + 6 | ||
| System | Group 1 | Group 2 | Group 3 | No. |
|---|---|---|---|---|
| BDS | ||||
| Strategy | Components | Static (m) | Dynamic (m) RMS |
|---|---|---|---|
| PPP | North | 0.008 | 0.025 |
| East | 0.006 | 0.016 | |
| Up | 0.015 | 0.056 | |
| URTK | North | 0.006 | 0.021 |
| East | 0.005 | 0.017 | |
| Up | 0.014 | 0.030 |
| DOY | 080 | 081 | 082 | 083 Average |
|---|---|---|---|---|
| PPP | 1460 | 1520 | 1540 | 1485 |
| RTK | 1.6 | 1.7 | 1.8 | 1.7 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, R.; Zhang, R.; Lu, C.; Zhang, P.; Liu, J.; Lu, X. A Unified Model for BDS Wide Area and Local Area Augmentation Positioning Based on Raw Observations. Sensors 2017, 17, 507. https://doi.org/10.3390/s17030507
Tu R, Zhang R, Lu C, Zhang P, Liu J, Lu X. A Unified Model for BDS Wide Area and Local Area Augmentation Positioning Based on Raw Observations. Sensors. 2017; 17(3):507. https://doi.org/10.3390/s17030507
Chicago/Turabian StyleTu, Rui, Rui Zhang, Cuixian Lu, Pengfei Zhang, Jinhai Liu, and Xiaochun Lu. 2017. "A Unified Model for BDS Wide Area and Local Area Augmentation Positioning Based on Raw Observations" Sensors 17, no. 3: 507. https://doi.org/10.3390/s17030507
APA StyleTu, R., Zhang, R., Lu, C., Zhang, P., Liu, J., & Lu, X. (2017). A Unified Model for BDS Wide Area and Local Area Augmentation Positioning Based on Raw Observations. Sensors, 17(3), 507. https://doi.org/10.3390/s17030507