1. Introduction
Real-time, non-destructive, and high-throughput acquisition of crop-growth information is the most important requirement for precision management of crop production. Traditional detection methods which rely on the destructive sampling of plants and indoor physical and chemical analyses, are time-consuming, laborious, and have poor timeliness. In recent years, technologies based on feature recognition using reflection spectra have proven to have several advantages over the traditional methods: non-destructibility, convenient access to information, and good real-time performance. Therefore, this kind of technology has been widely used in research on the mechanisms of monitoring crop growth [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11].
At present, research institutions around the world have gained access to reflection spectra of crop canopies obtained using various devices (e.g., Cropscan multispectral radiometers [
12], ASD FieldSpec 3 hyper-spectrometers [
13,
14], GreenSeeker sensors [
15,
16], and CropCircle ACS-470) [
17]. The research undertaken has indicated out that there is a good correlation between the reflection spectra of crop canopies and crop nutrients. Hand-held sensors are usually used to statically acquire information about the crop canopy. Although these types of sensors can produce a detailed determination of the spectral characteristics of a crop’s biochemical components, they have several disadvantages including small monitoring range, large labor intensities, and a monitoring regime that is discontinuous. Therefore, these methods cannot provide the high-throughput of information needed for real-time decisions to be made in the production and management of crops spread over large areas in the field. To address this problem, research institutes have started to develop crop-growth monitoring equipment based on vehicle platforms.
The German Yara and Japanese Topcon companies have designed ways to determine the nitrogen content of crops (using their proprietary N-Sensor [
18,
19] and laser modulated light source sensor CropSpec [
20], respectively). In addition, the Trimble Navigation Company based in the United States has also produced the GreenSeeker-RT200 sensor to determine the normalized difference vegetation index (NDVI) of crops [
21,
22]. Such equipment can continuously gather information on crop growth with a high-throughput and high labor efficiency. However, the vehicle platform causes a certain amount of destruction of crops in operation. Also, operation is not flexible and is easily limited by the size and terrain of the farmland.
The use of unmanned aerial vehicles (UAVs) for such operations promises to have several advantages including high efficiency, good flexibility, convenient operation, and strong adaptability to terrain. Thus, UAVs are becoming more extensively applied to the monitoring of crop growth [
23]. By utilizing a miniature hyperspectral infrared thermograph on a UAV, Zarco-Tejada et al. [
24] obtained hyperspectral image information on a citrus canopy of large area. The water-stress state of the citrus trees was analyzed offline using remote sensing image processing software including the Environment for Visualizing Images (ENVI). By fixing a color camera onto a UAV, Bendig et al. [
25] acquired real-color images of a tree canopy and established a three-dimensional (3D) geometrical model of the trees. Moreover, crop vegetation indices and plant heights could be measured with the use of a ground-based hyper-spectrometer.
By using UAVs with spiral and fixed wings equipped with a real-color camera and a color-near infrared camera, respectively, Rasmussen et al. [
26] obtained information on a crop canopy under different lighting environments. Image processing software was then used to splice and interpret the information obtained so that crop vegetation indices could be obtained. Moreover, it was verified that consumer-grade color cameras could be used to reliably acquire images to allow vegetation indices to be retrieved. A multispectral camera carried on a UAV was used by Caturegli et al. [
27] to obtain multispectral images of lawns. By utilizing ENVI software to process the images, information on the vegetation index of the lawns could be extracted to evaluate their nitrogen nutrition status.
Most of the abovementioned research used a UAV as a platform to carry various types of imaging spectroradiometers to obtain images containing crop information. This information was then corrected offline and spliced using special remote-sensing analysis software in order to interpret the crop-growth information. Due to the complexity of the procedures employed, such an operation needs remote-sensing specialists and is mainly used in scientific research. Furthermore, any possible interpretation of the crop-growth information is delayed and the images cannot be directly used in agricultural production. Besides this, the approach cannot be popularized in agricultural production settings due to the high price of the equipment involved (mainly the various imaging spectrometers).
NDVI and the ratio vegetation index (RVI) are two commonly used indices when inverting crop-growth parameters in the existing UAV-based remote sensing field. Gao et al. [
28] carried out experiments using a multi-rotor UAV as the platform from which a crop-growth monitoring system composed of a Canon PowerShot G16 camera and an ADC-Lite multispectral sensor was trialled. In the experiments, remotely sensed images of soybean in its podding and seed-filling stages were obtained. On this basis, by using vegetation indices, including NDVI and RVI, and combining them with LAI data synchronously measured in the field, they constructed univariate and multivariate LAI inversion models using empirical methods. By using an improved camera with an infrared filter borne on an UAV, Ghazal et al. [
29] acquired NDVI videos which were then processed to obtain the area of crop growing spots, and relevant agronomic parameters were inverted at the same time. Tian et al. [
30] acquired remote sensing images of winter wheat using an UAV-borne ADC air vegetation canopy camera. Based on the spectral characteristics of the images and the changing threshold of NDVI, they proposed a quick classification and extraction method for crops. The results show that, using the method to extract classification information of crops of different types from high-resolution images collected by UAVs presents high accuracy and universality. All this suggests that, while being used for inverting crop agronomic parameters and classifying crop characteristics, NDVI and RVI show high accuracy and potential application value.
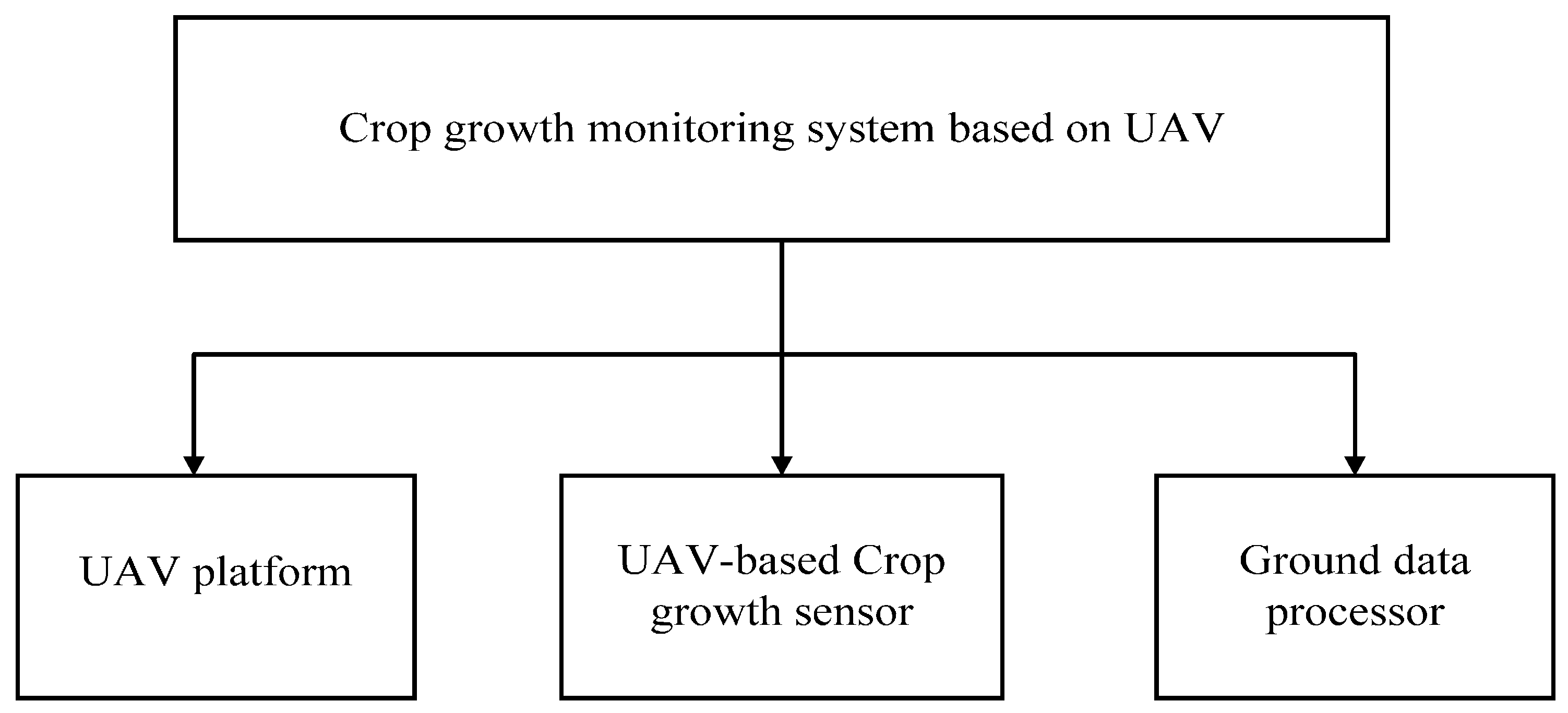
In this study, we present a new UAV-borne crop-growth monitoring system based on research achievements of the Nanjing Agricultural University in China relating to crop-growth sensors [
31,
32,
33,
34]. The work is aimed at meeting the demands for a high-throughput, continuous, and online real-time method of acquiring crop-growth information. Using a four-rotor UAV (DJI Phantom, SZ DJI Technology Co., Ltd. Shenzhen, China) as the operating platform, we independently design a UAV-borne crop-growth sensor and a matching ground-based data processor to complement the platform. We subsequently used the system to determine, in real-time and online, the major growth indices of a crop canopy including the NDVI, ratio vegetation index (RVI), leaf nitrogen accumulation (LNA), leaf area index (LAI), and leaf dry weight (LDW). This research thus provides a new technological means of acquiring high-throughput growth information for crops covering large areas.
3. Tests and Analysis of Results
3.1. Test Design
Systematic field tests were conducted in experimental wheat fields in Sihong County, Suqian City, Jiangsu Province, China from March to May 2016. The test varieties Ningmai 13 and Huaimai 20 were fertilized using five levels of nitrogen application, namely, N0 (0 kg/hm2), N1 (90 kg/hm2), N2 (180 kg/hm2), N3 (270 kg/hm2), and N4 (360 kg/hm2), each of which was repeated three times. Each separate plot covered an area of 42 m2 (6 m × 7 m plots). Moreover, 135 kg/hm2 of potash fertilizer (K2O) was applied so the ratio of nitrogenous to potash fertilizers was 5:5. The basic fertilizers were applied before seeding, while the topdressing fertilizers were fertilized at the jointing stage. In addition, 105 kg/hm2 of P2O5 base fertilizer was used for one time during soil preparation. The other cultivation and management measures undertaken were the same as those commonly employed in high-yield fields.
3.2. Test Methods
3.2.1. UAV-Borne Crop-Growth Sensor Measurements at Different Elevations
Before flying the UAV, static tests were carried out. This was done by holding the UAV-borne crop-growth sensor at different elevations to verify the detection performance of the sensor after making the improvement in system weight. The static tests made using the sensor in hand-held mode remove the potential effects of several factors including the shake of the UAV body and rotor wind fields. Tests were carried out at the tillering and jointing stages from 10:00 to 14:00 on sunny days. For each test, the hand-held UAV-borne crop-growth sensor and a commercial ASD spectrometer were simultaneously employed to determine the reflection spectra of the canopy of the wheat. For these measurements, the vertical distance between the two-band sensor and the wheat canopy was either 0.4 or 1.0 m. Three locations in each separate region were measured four times and the average values computed. Then, the NDVI and RVI values determined using the ASD spectrometer at 720 and 810 nm and those output from the UAV-borne crop-growth sensor were recorded.
Afterwards, the crop-growth sensor was fixed onto the UAV for the next set of measurements. The initial flight tests made using the UAV/sensor combination were intended to verify the immunity of the designed UAV-borne sensor to the effects of vibration encountered during the flight and disturbance created by the down-wash wind fields from rotors. At the jointing, booting, and heading stages, the reflection spectra of the canopy were dynamically tested at different elevations using the UAV-borne crop-growth sensor from 10:00 to 14:00 on sunny days in the absence of wind. In these tests, the flying height of the UAV was adjusted so that the vertical distance from the two-band sensor to the wheat canopy was 0.4, 0.7, 1.0, and 1.2 m. At each height, the UAV was made to hover by keeping its rotors rotating at the rated speed. In this way, the NDVI and RVI values as output by the UAV-borne crop-growth sensor were recorded at the different elevations used. The field tests are shown in
Figure 12.
3.2.2. Performance Tests
Performance tests were conducted between 10:00 and 14:00 on sunny (windless) days at the tillering, jointing, booting, and heading stages of wheat growth. During the tests, the UAV-borne crop-growth monitoring system was used to measure reflection spectra of the wheat canopies. As a further check, the ASD spectrometer was simultaneously used to detect the reflection spectra of the canopies. The flight height of the UAV was adjusted so that the vertical distance between the two-band sensor and wheat canopy being measured was 1.0 m. Three points in each separate region were measured with four repetitions to permit more representative average values to be calculated. The NDVI and RVI values measured using the ASD spectrometer at 720 and 810 nm and the values output by the UAV-borne crop-growth sensor were recorded. At the same time that the spectral measurements were made, 20 single stems were selected from each region and separated according to their organs in the laboratory. A leaf area meter (model: LAI3000C) was used to measure the leaf area and thereby the LAI of the whole field region could be calculated. Afterwards, the samples were heated to 105 °C for 30 min (as green-killing treatment) and then dried to constant weight at 80 °C. Thus, the LDW could be determined. After smashing the samples, the Kjeldahl nitrogen method was used to determine their LNA values.
3.3. Data Analysis
The data from the tests were statistically analyzed by using appropriate software (Excel 2010). The correlation of the model was evaluated by calculating the root mean square errors (RMSEs) and determination coefficients. The stability of the method was assessed through the variances and variation coefficients derived. The necessary formulas required for the calculations are:
In Equations (2)–(5), xi, μ, s, CV, di, and RMSE represent the ith measured value, mean value, standard deviation, deviation coefficient, difference between the ith measured and ith true value, and the root mean square error, respectively.
3.4. Results and Discussion
3.4.1. Elevation Test Results
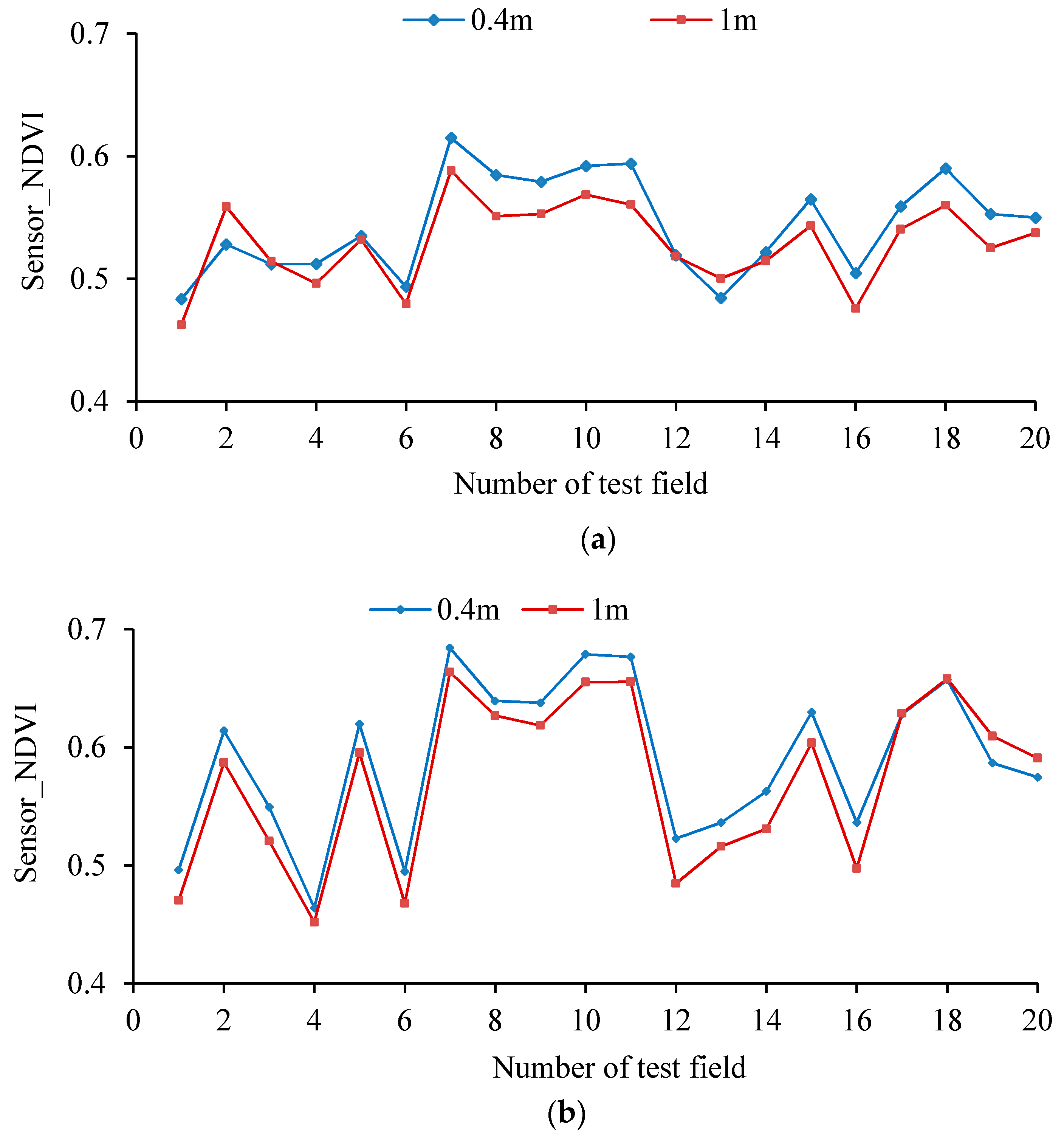
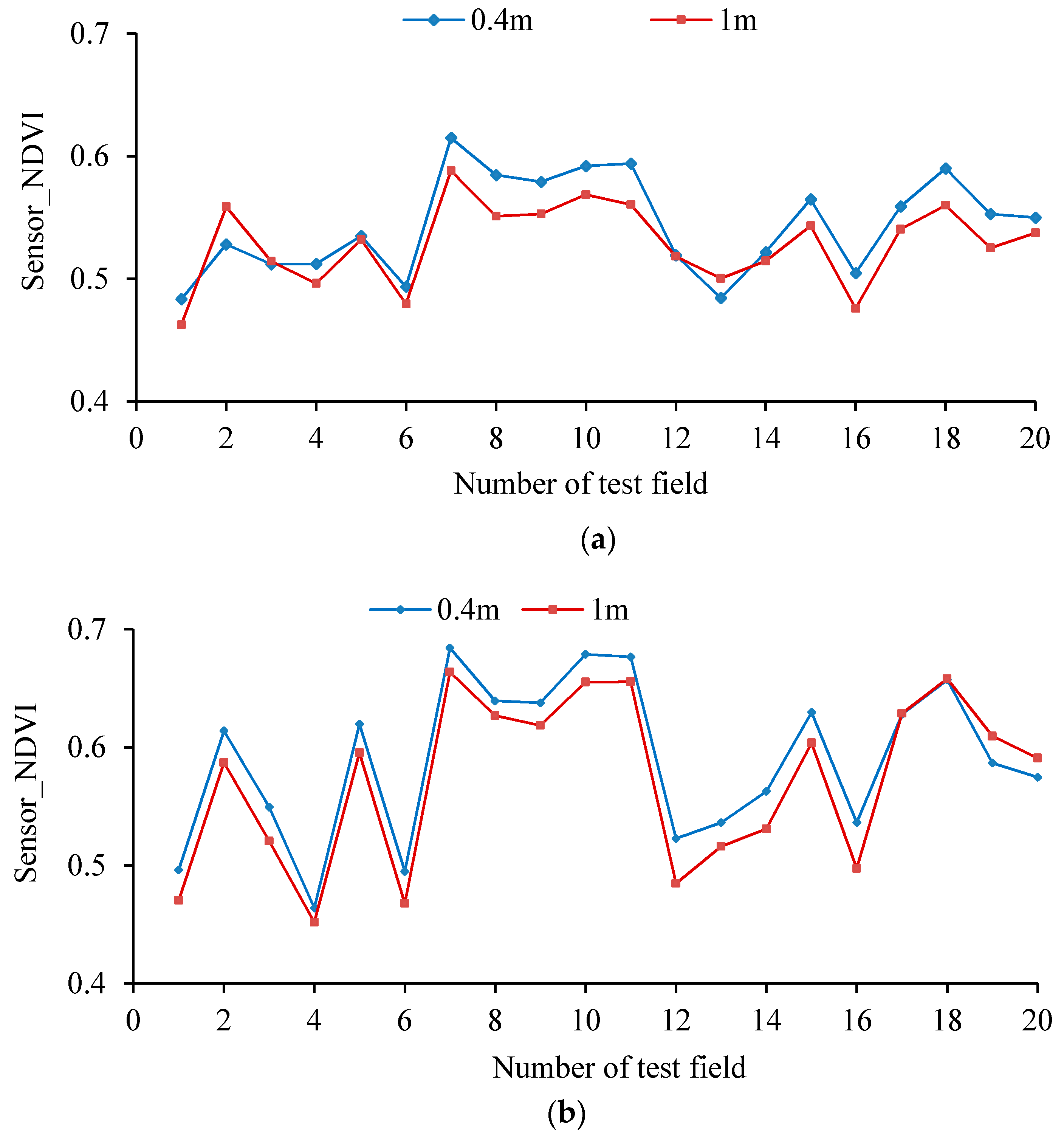
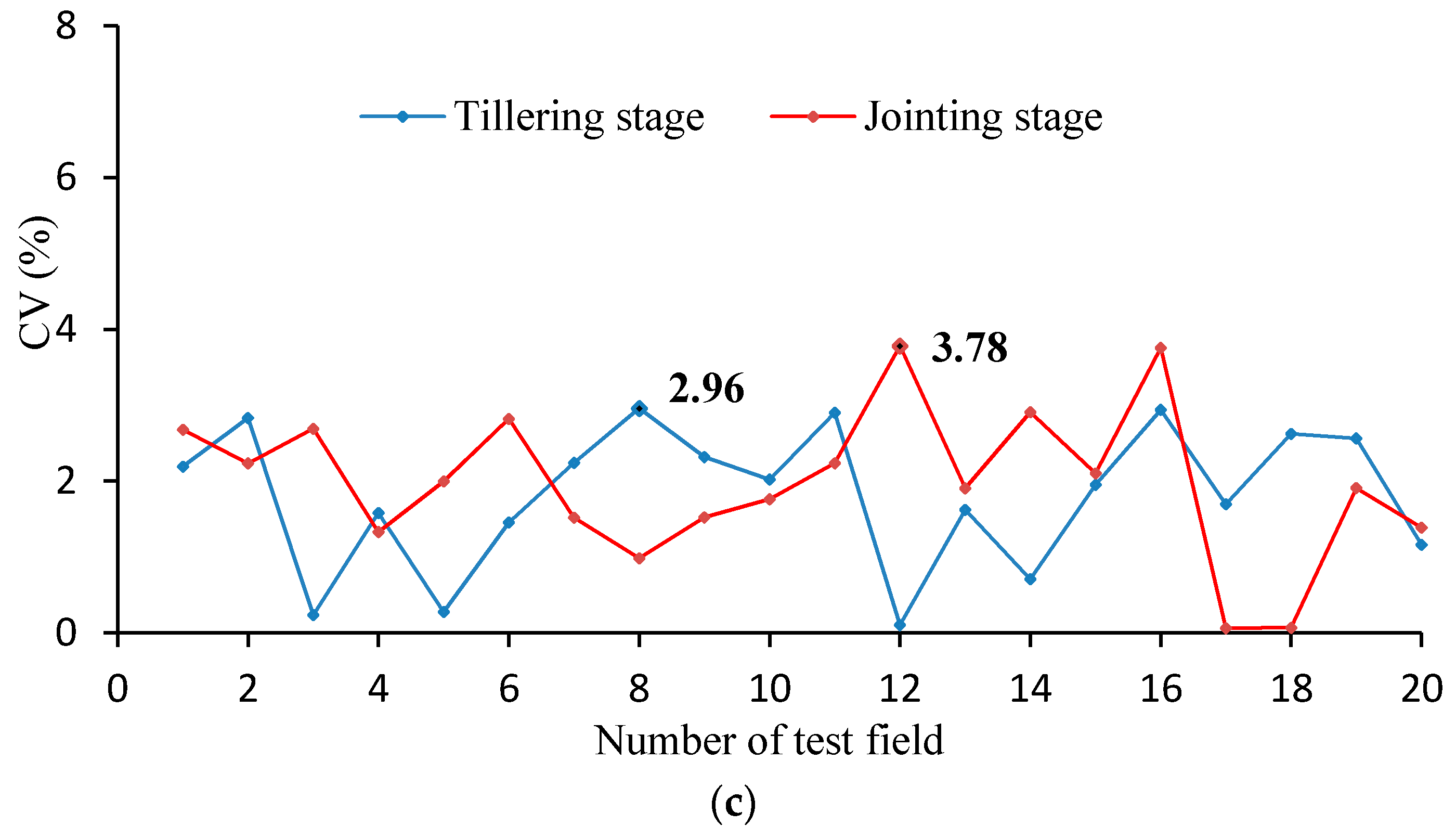
Figure 13 shows the NDVI values measured when the hand-held crop-growth sensor is 0.4 and 1.0 m from canopy for wheat at its tillering and jointing stages. It can be seen that the variation exhibited by the NDVI curves is consistent at both of the elevations used. By calculating the deviation coefficients, the stability variance of the NDVI values, as measured by the sensor at the two different elevations, is found to be 0.03. The maximum deviation coefficient is 3.78%, so the difference is small. This is a good indication of the high stability of the weight-improved sensor over its intended range of operating altitudes.
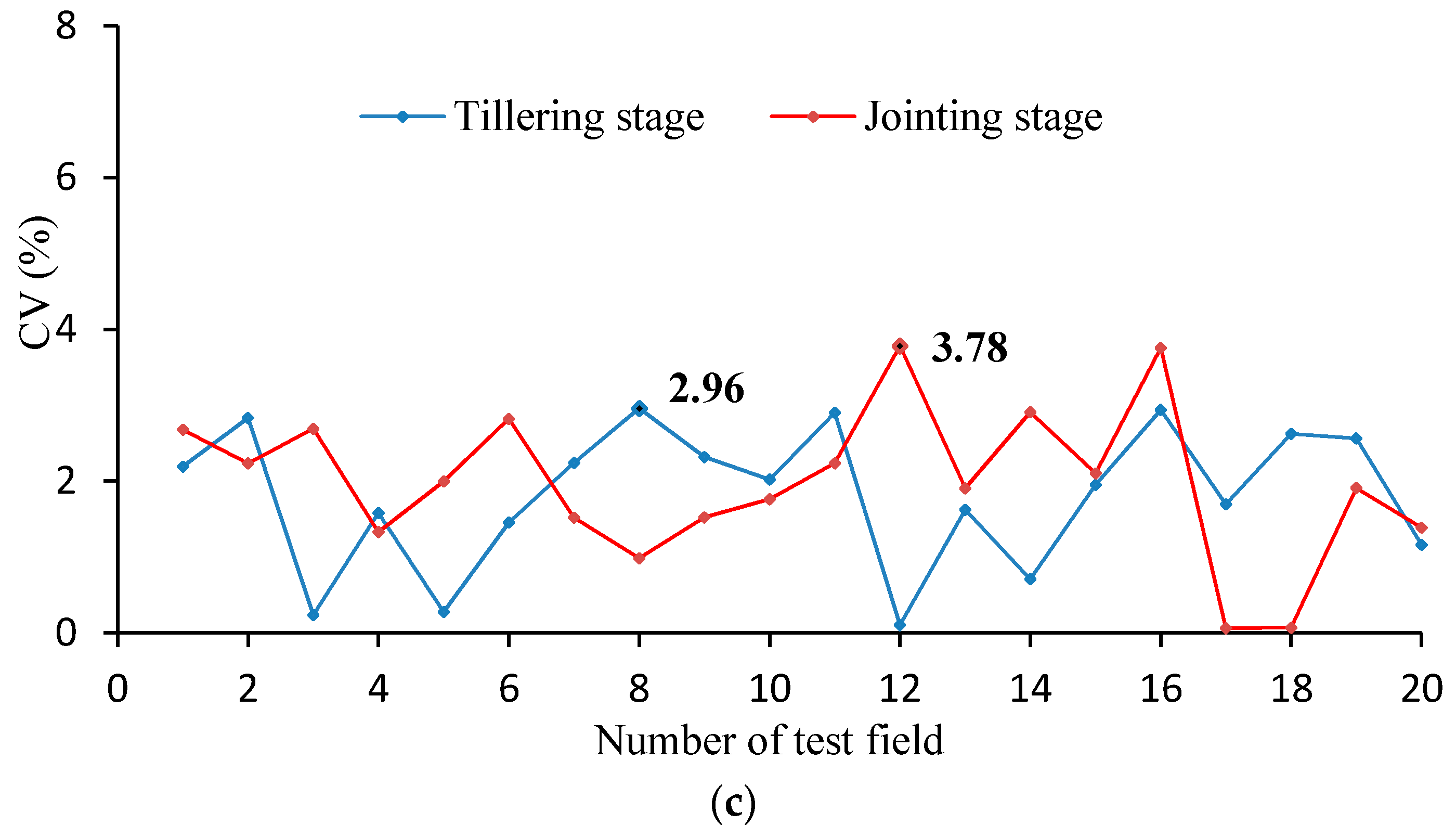
The RVI and NDVI values measured by the ASD spectrometer and the UAV-borne crop-growth sensor at an elevation of 1 m (relative to the canopy) were fitted to a one-variable linear function using a least-squares fitting procedure (
Figure 14).
The figure shows that a good linear relationship exists between the RVI and NDVI values output by the UAV-borne crop-growth sensor and the ASD spectrometer. The coefficients are determined to be 0.82 and 0.77 and the RMSEs are 0.17 and 0.05, respectively. Thus, the measurements made using the lightweight sensor can be seen to have a high level of precision.
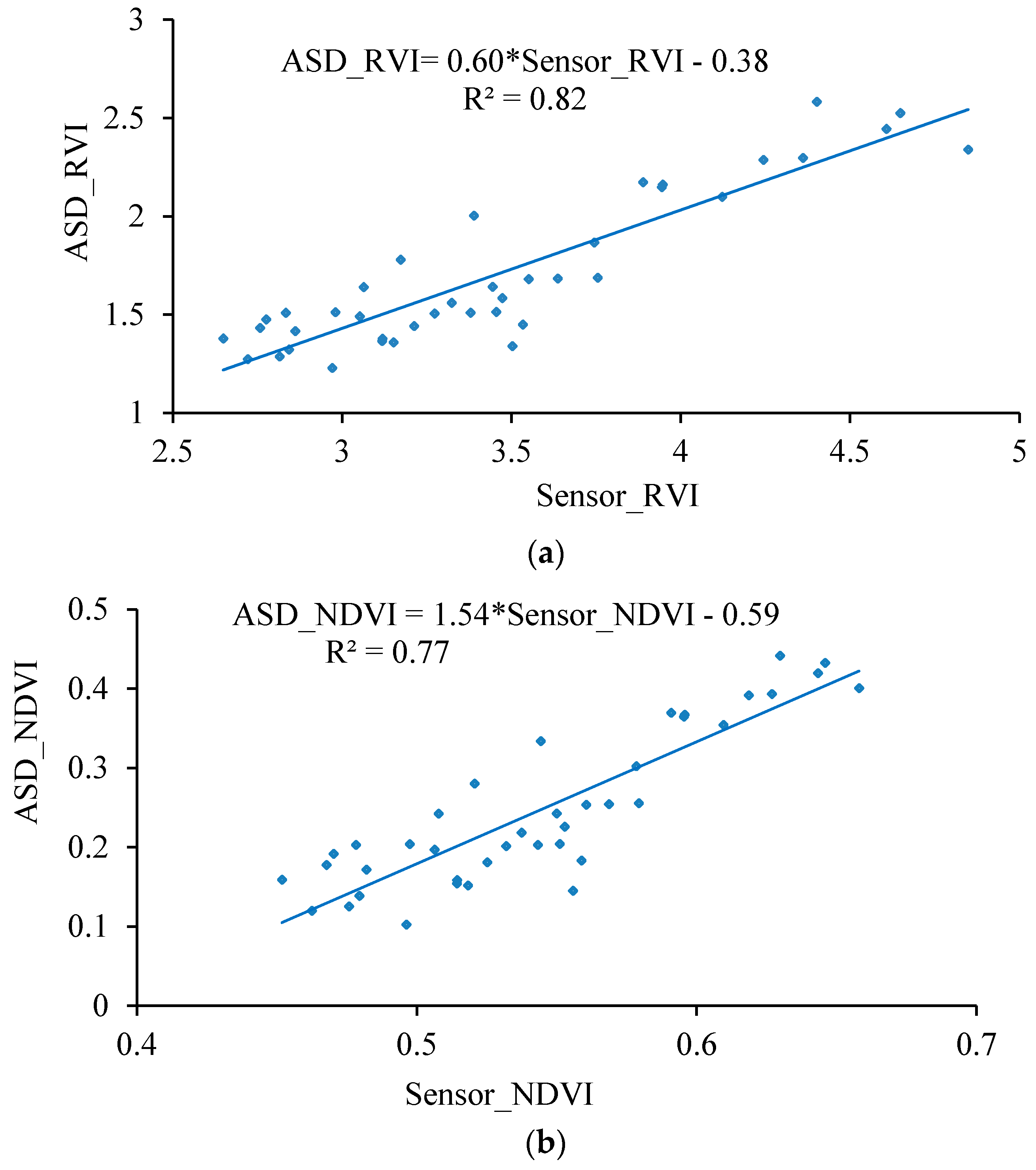
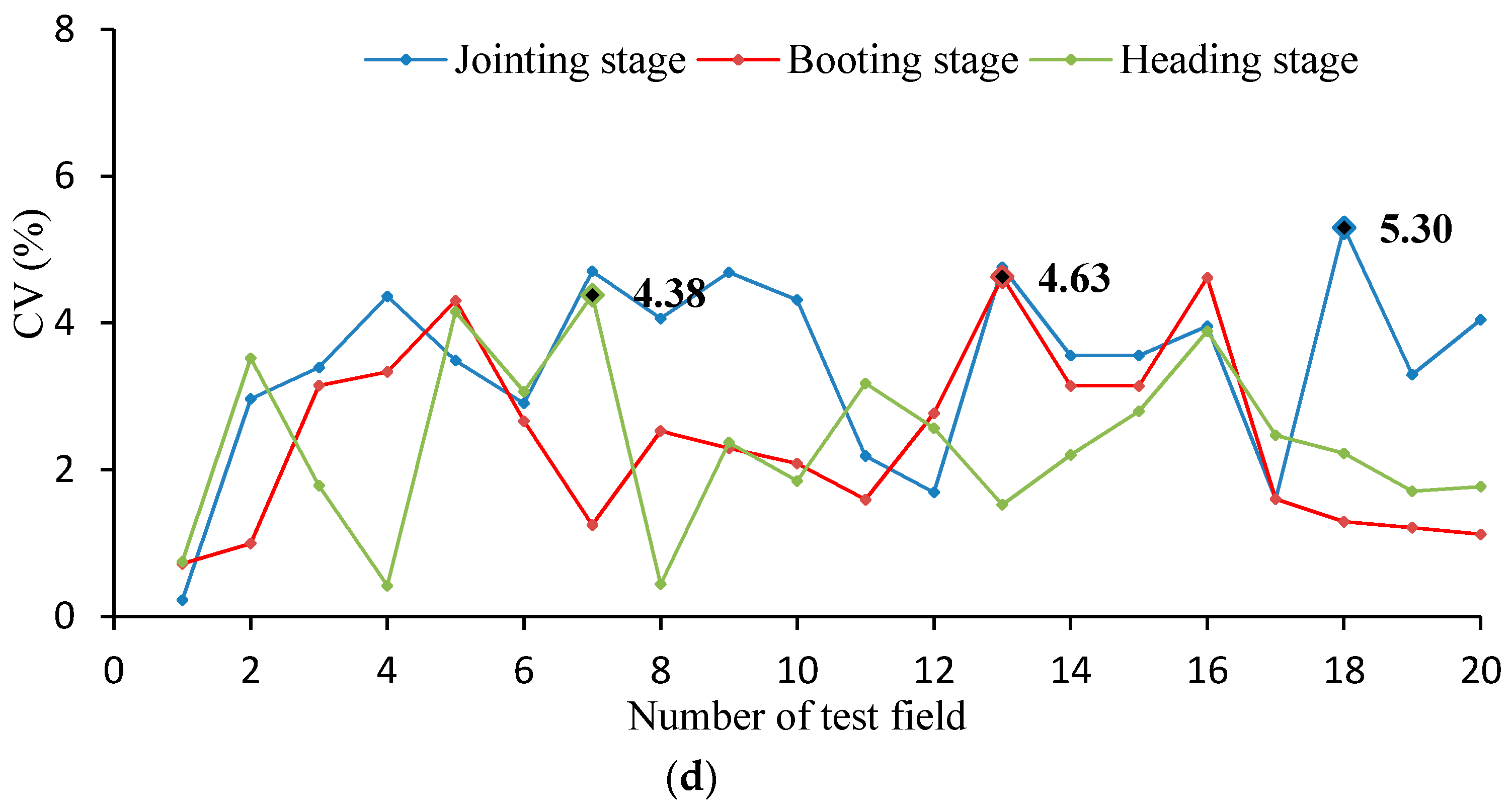
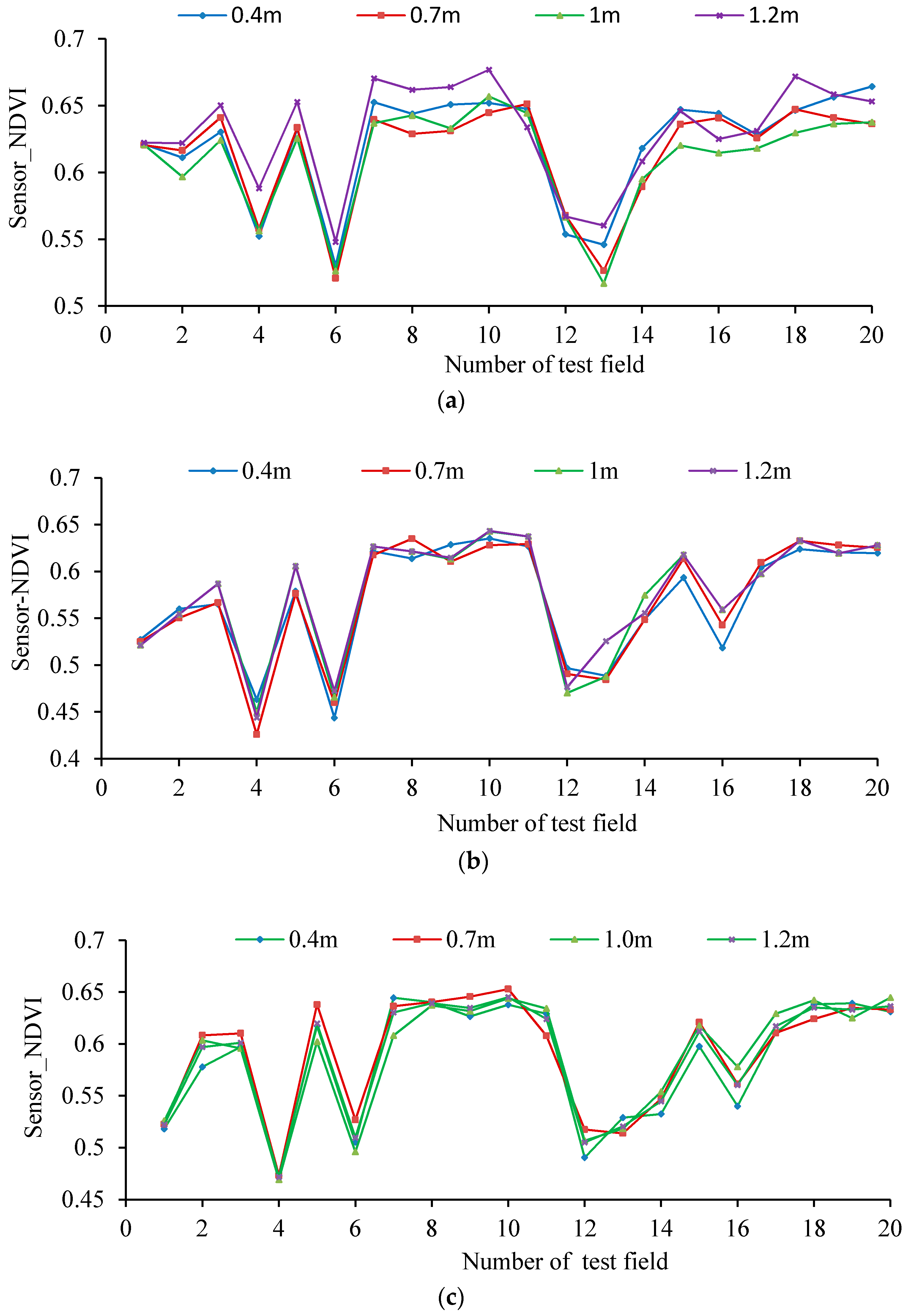
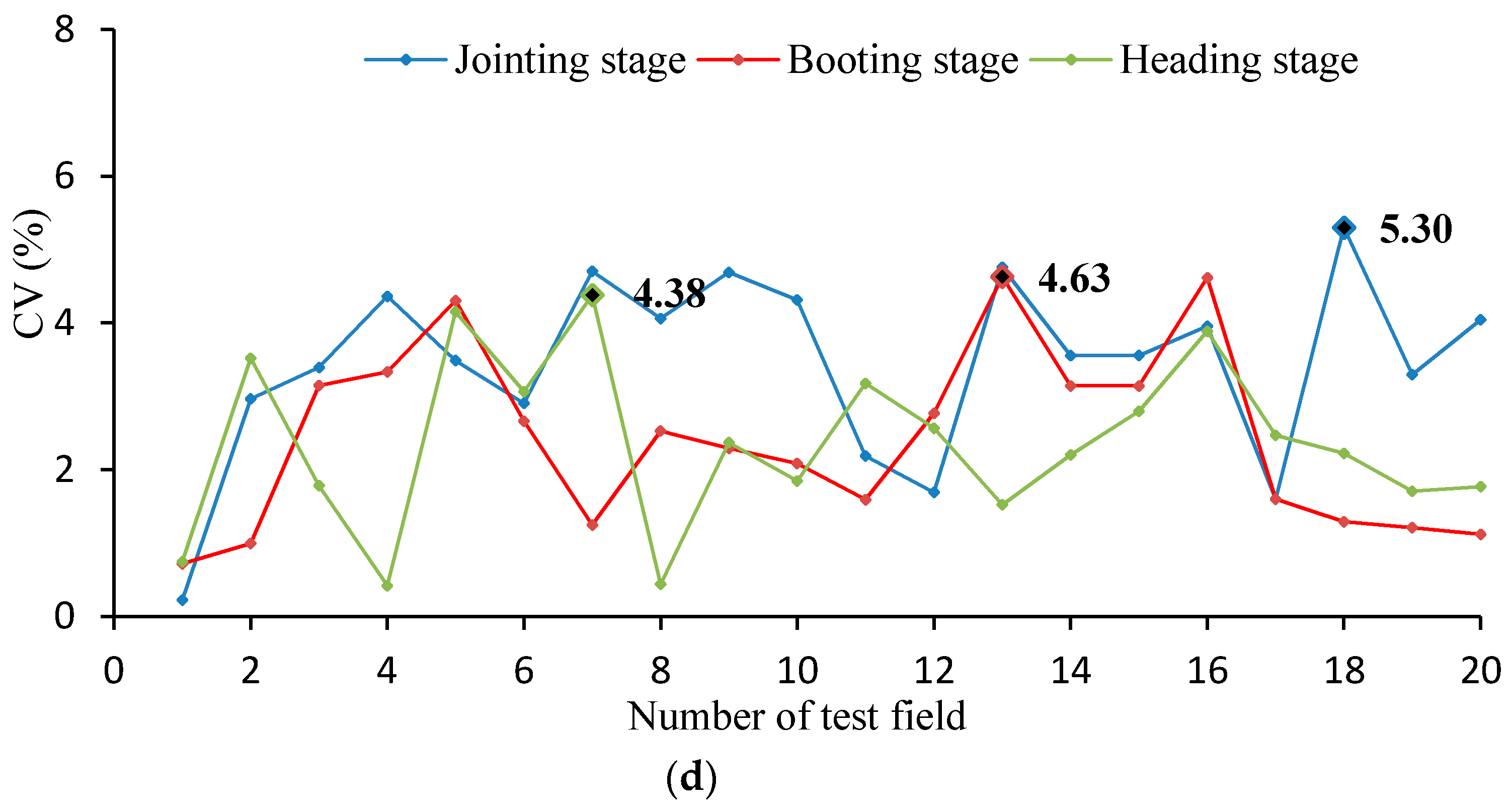
Figure 15 displays the NDVI values measured when the UAV hovered at 0.4, 0.7, 1.0, and 1.2 m over the canopy (by adjusting to the rated rotation) at the jointing, booting, and heading stages of the wheat. As can be seen from the figure, the changes observed in the NDVI values are consistent at the different measurement elevations employed. The deviation coefficients were then calculated. The variance of stability for the NDVI values measured using the sensor at different elevations is 0.0034 and the maximum deviation coefficient is 5.30%, so the differences are small. This suggests that the sensor installation position is reasonable, and that the effects on the sensor of the UAV vibrations and down-wash flow fields are small. Furthermore, the system has good dynamic stability over the range of operating altitudes of the sensor.
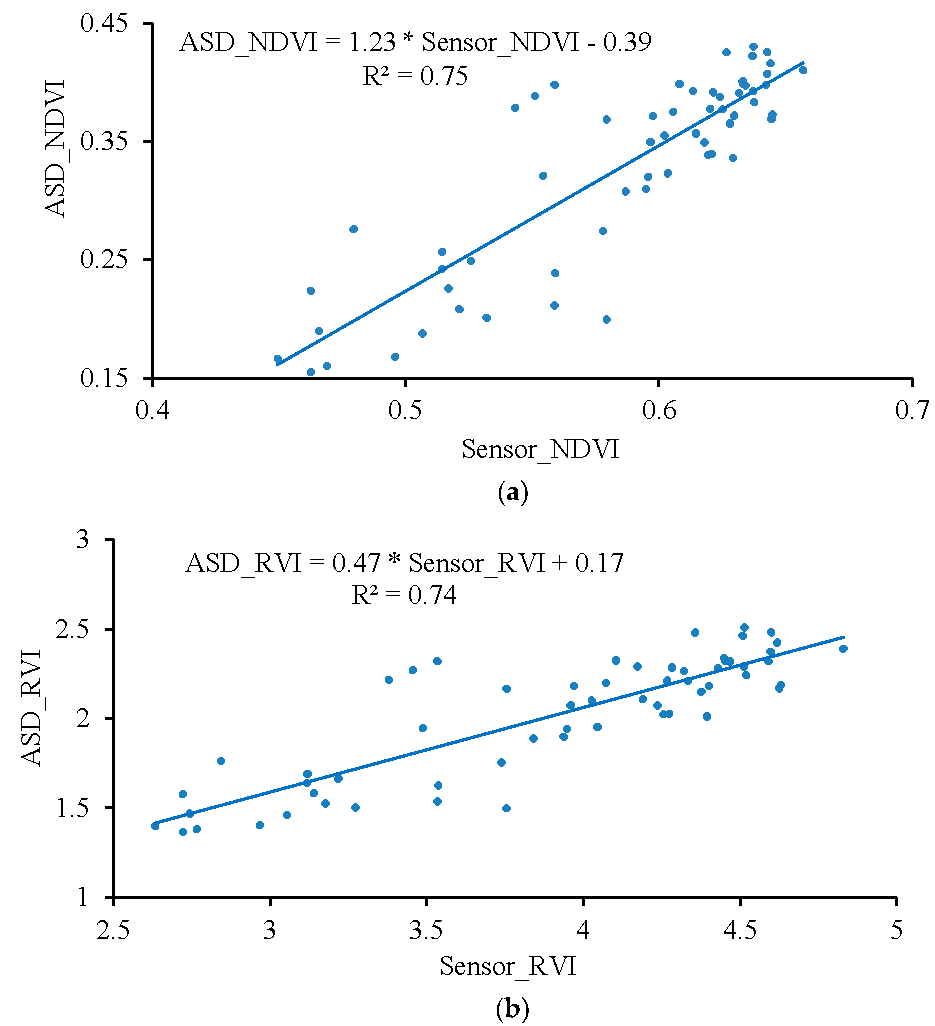
The RVI and NDVI values measured 1 m from the canopy by the ASD spectrometer and UAV-borne crop-growth sensor were also fitted to a one-variable linear polynomial using least-squares regression (
Figure 16). The figure shows there is a good linear relationship between the RVI and NDVI values output by the UAV-borne crop-growth sensor and those from the ASD spectrometer. The coefficients are determined to be 0.74 and 0.75 and the RMSEs are 0.18 and 0.04, respectively. This shows that the sensor support designed according to the numerical simulation of the down-wash flow fields can effectively avoid disturbance from the wind fields. In addition, the UAV-borne crop-growth sensor can be used to make dynamic measurements with high precision.
3.4.2. Performance Test Results for the UAV-Borne Monitoring System
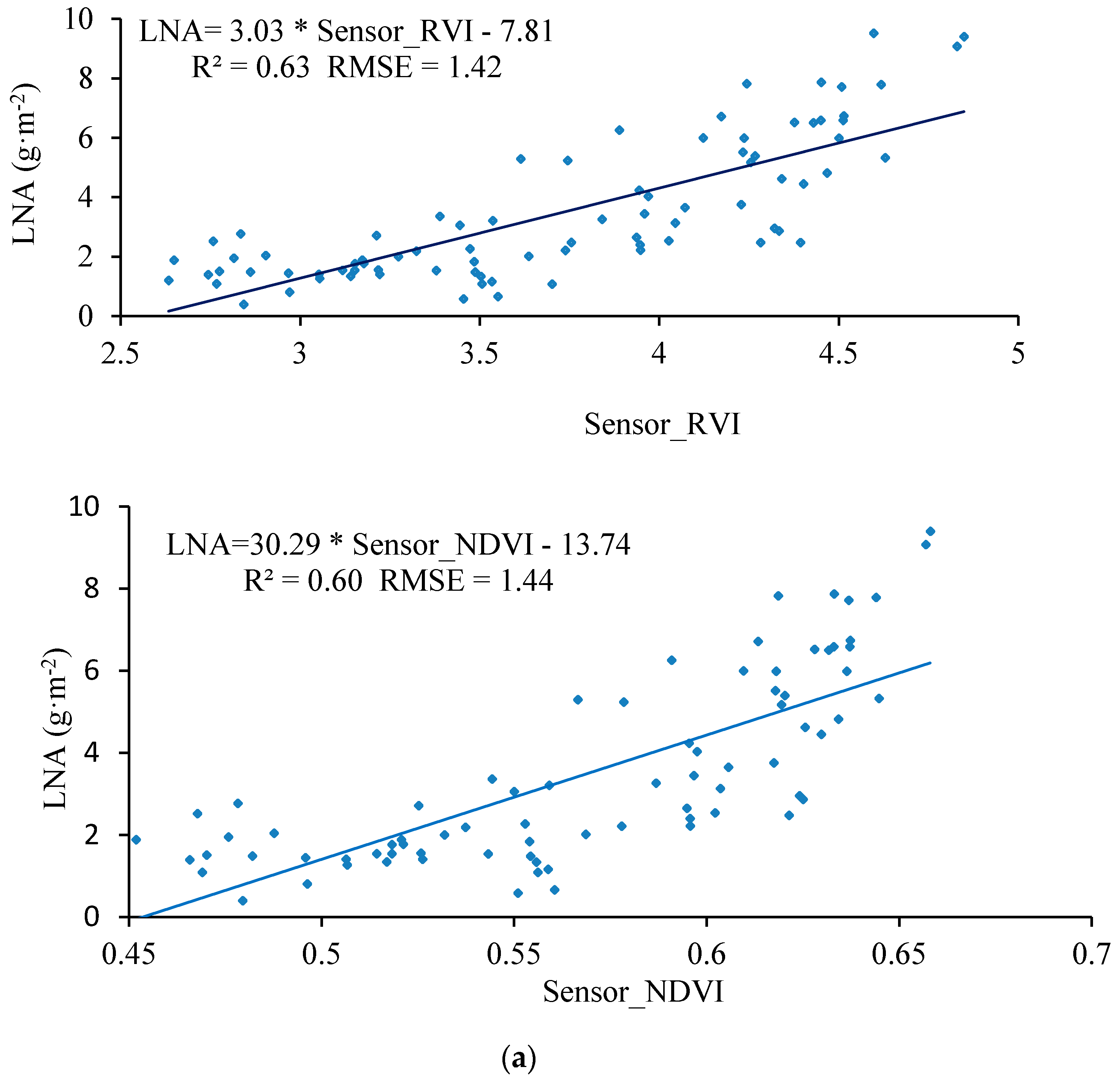
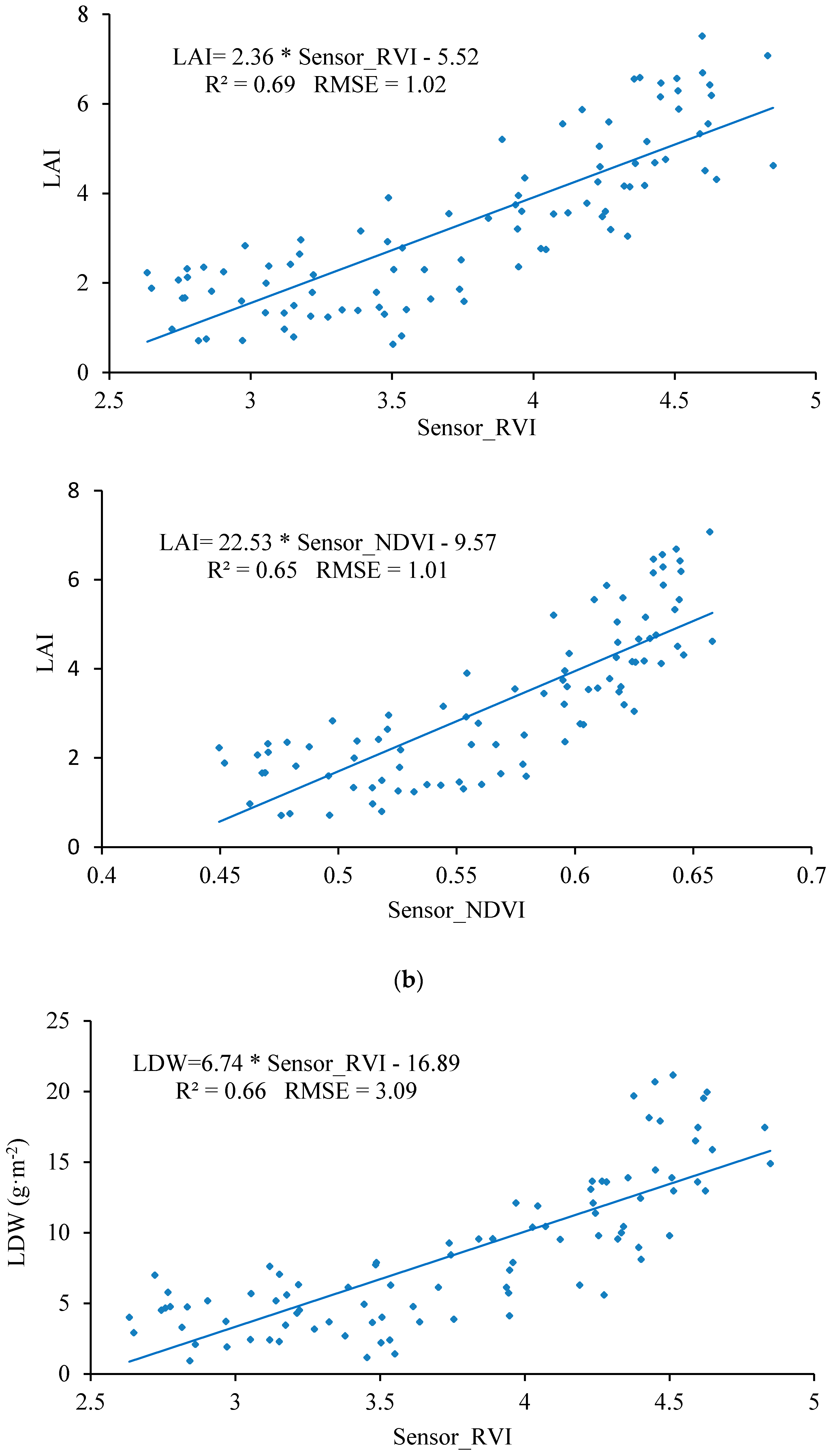
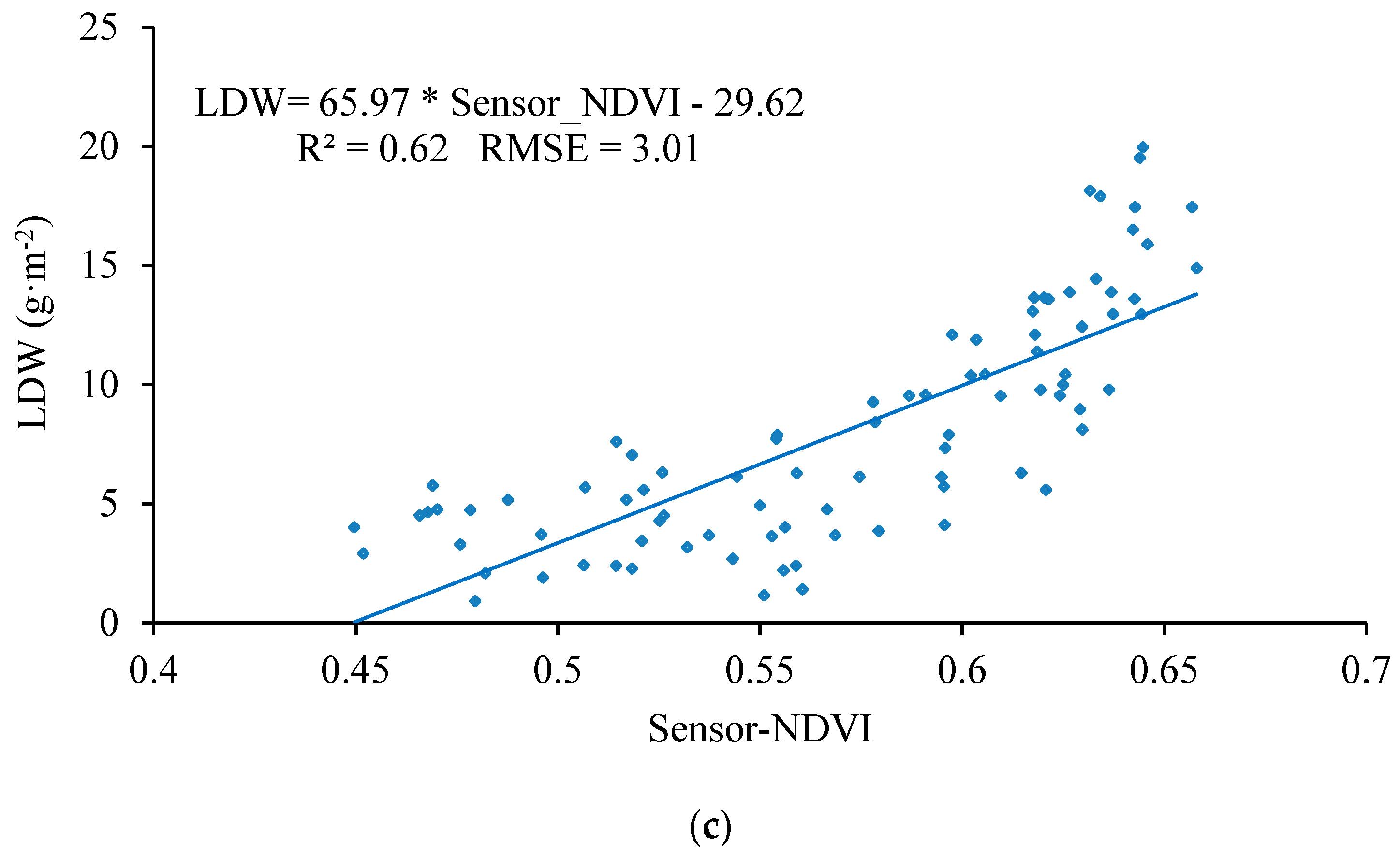
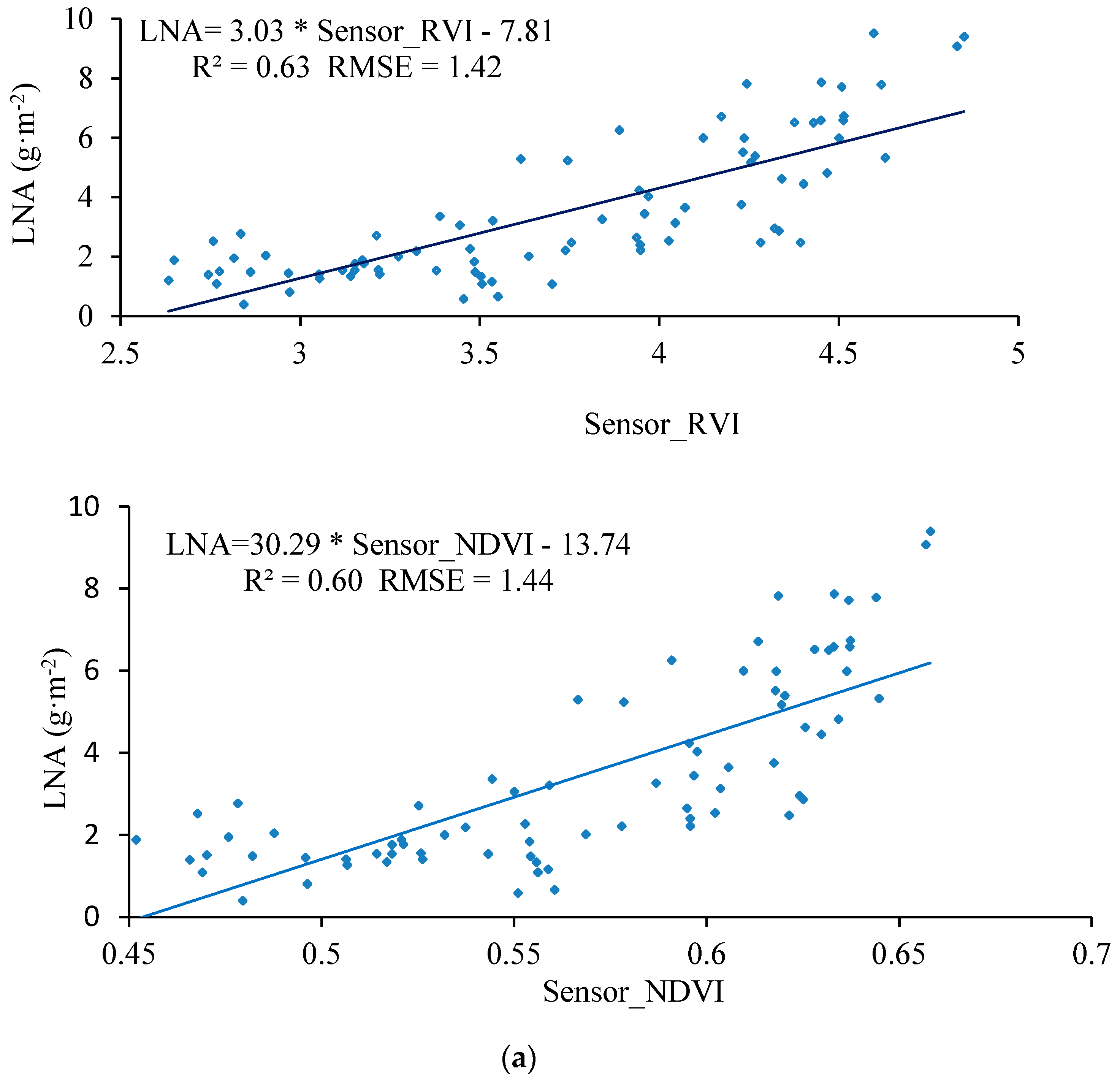
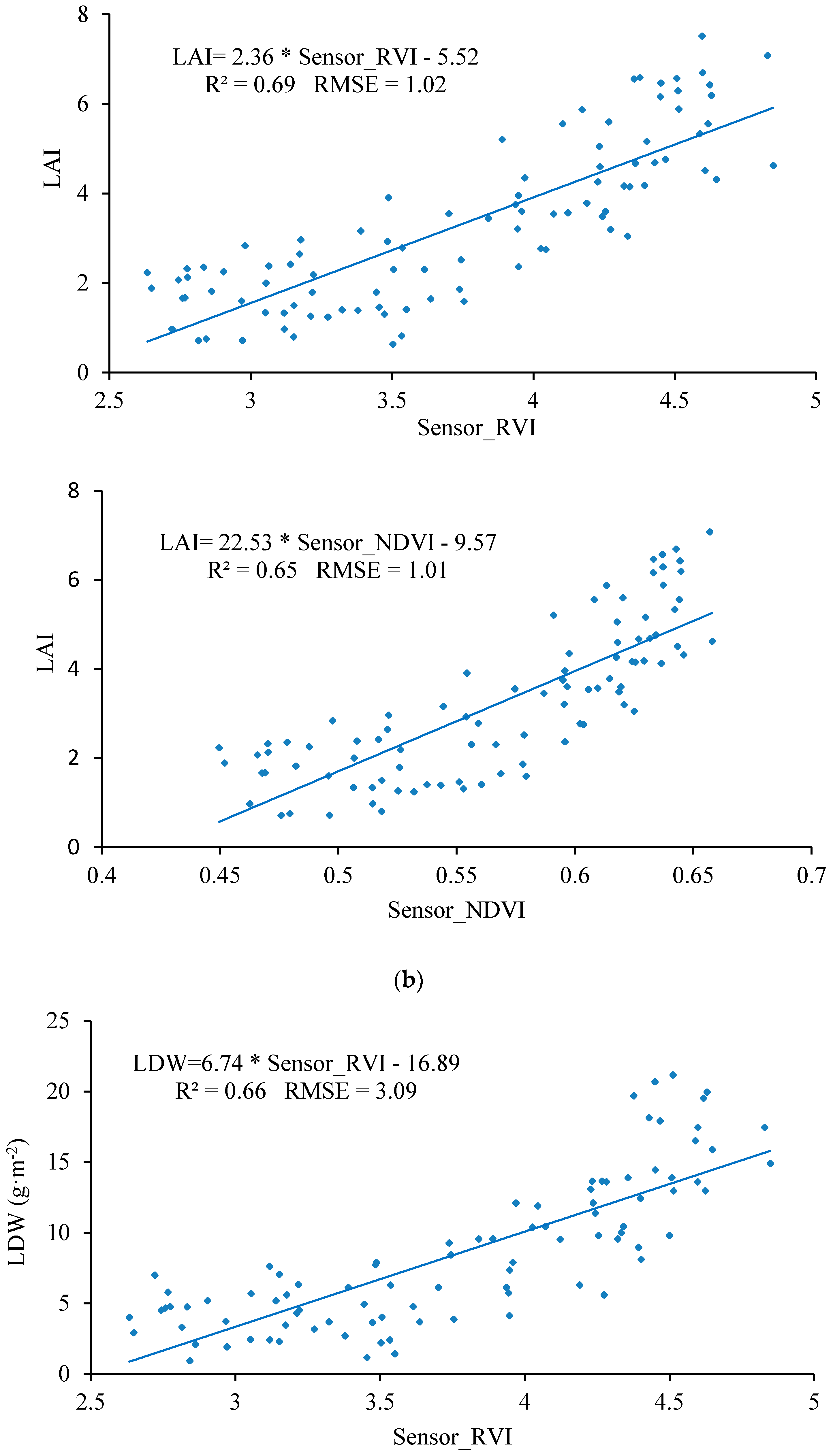
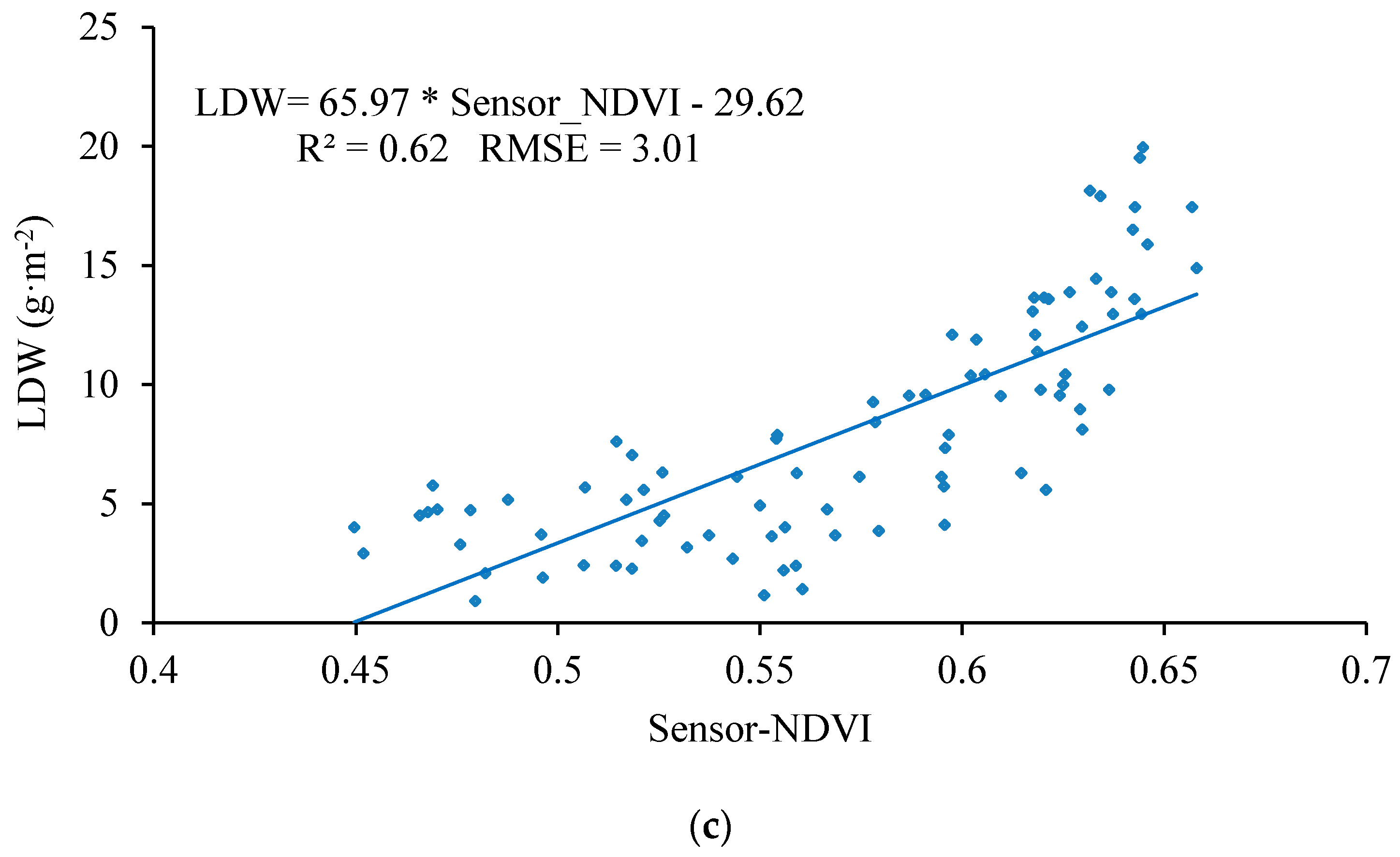
As shown in
Figure 17, the UAV-borne crop-growth monitoring system can accurately reflect the changes in the wheat growth indices (the measured RVI and NDVI values show good linear relationships with LNA, LAI, and LDW). The determination coefficients
R2 of the RVI values with respect to LNA, LAI, and LDW are 0.63, 0.69, and 0.66, and the RMSEs are 1.42, 1.02, and 3.09 respectively. Similarly, the determination coefficients
R2 of the NDVI values with respect to LNA, LAI, and LDW are 0.60, 0.65, and 0.62 and the RMSEs are 1.44, 1.01 and 3.01, respectively. The fitting equations thus established were subsequently stored in the control chips of the ground-based data processor. The system thus calibrated is capable of quickly, non-destructively, and online quantitatively analyzing the growth information subsequently collected on the wheat.
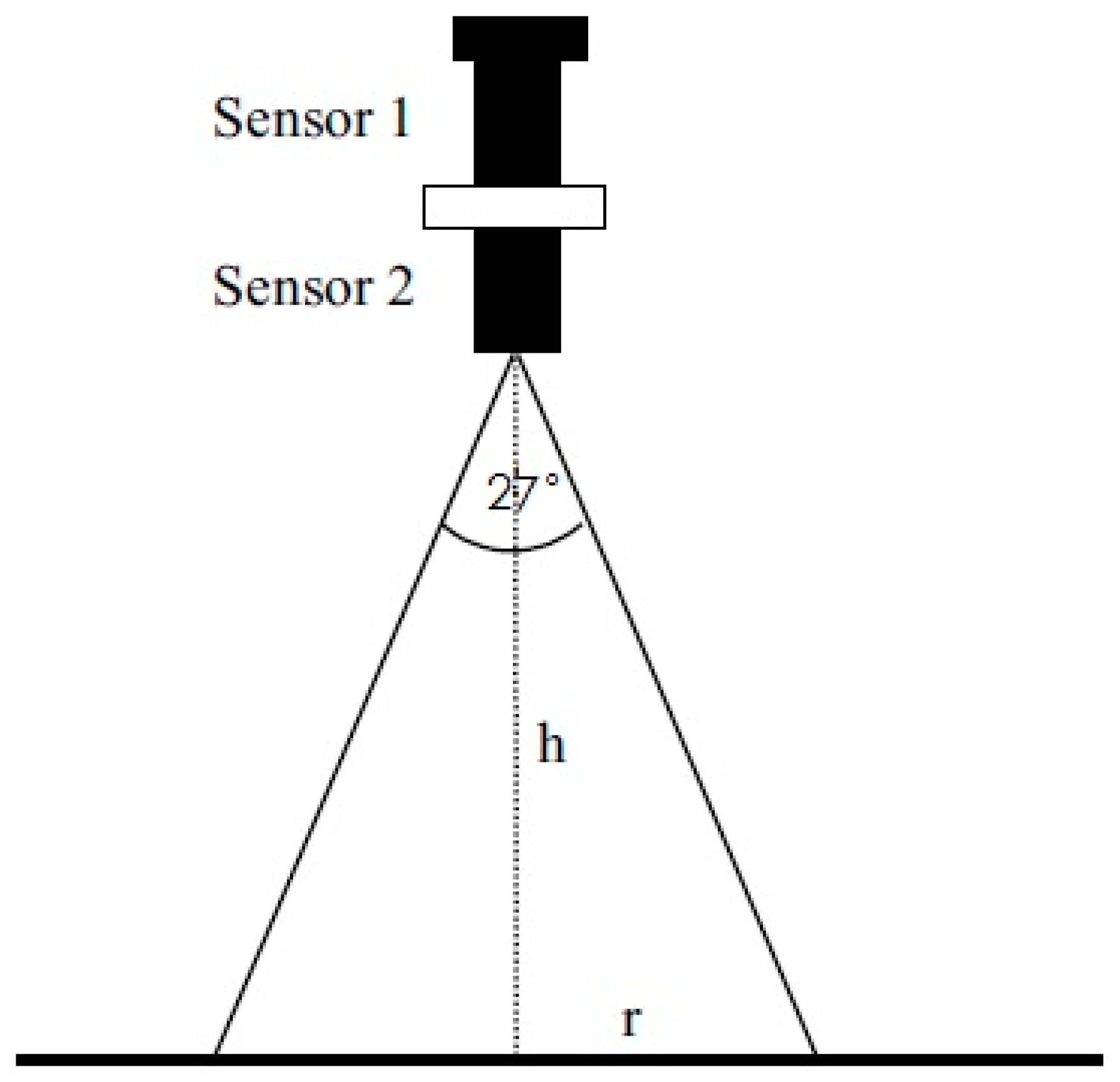
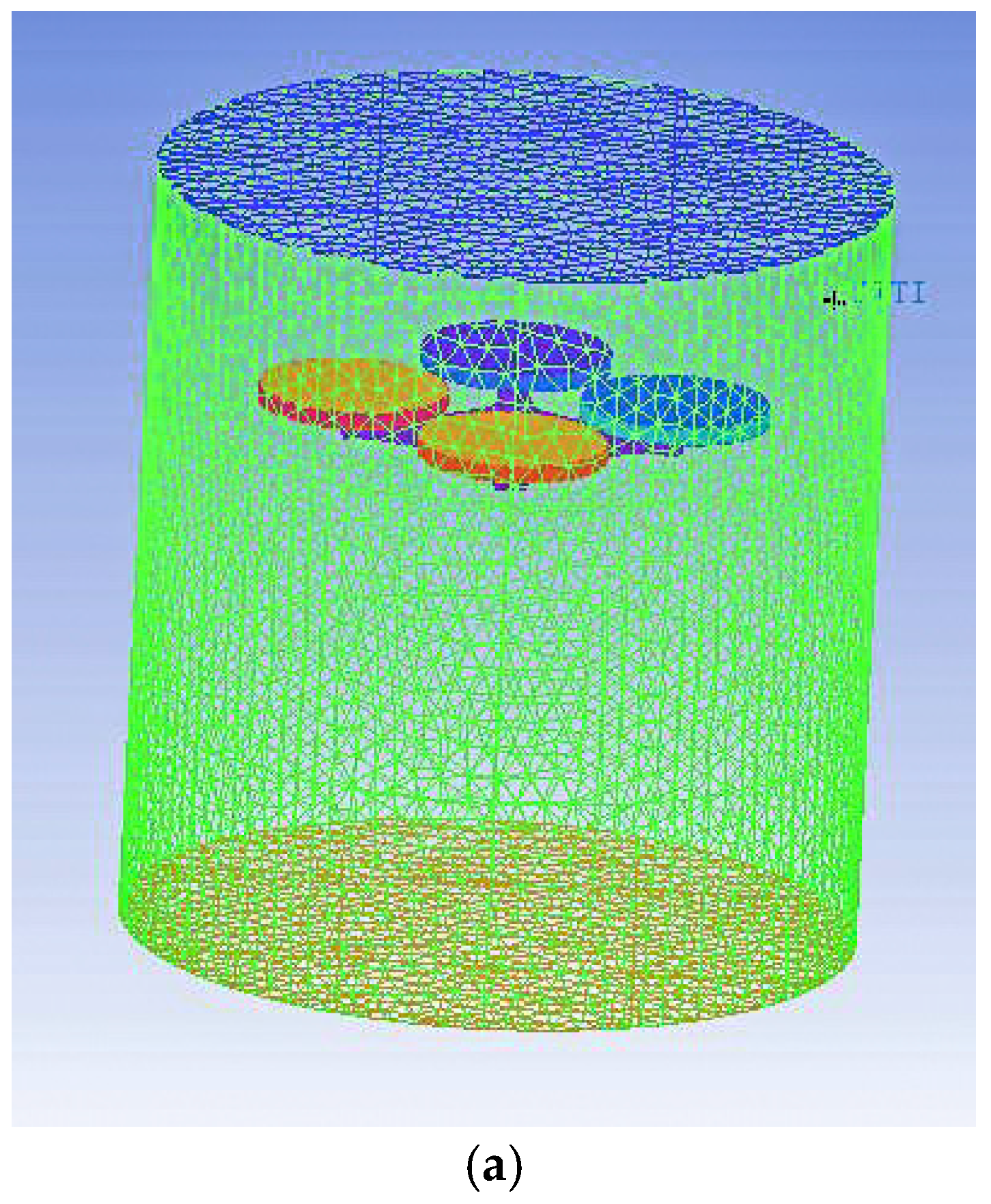
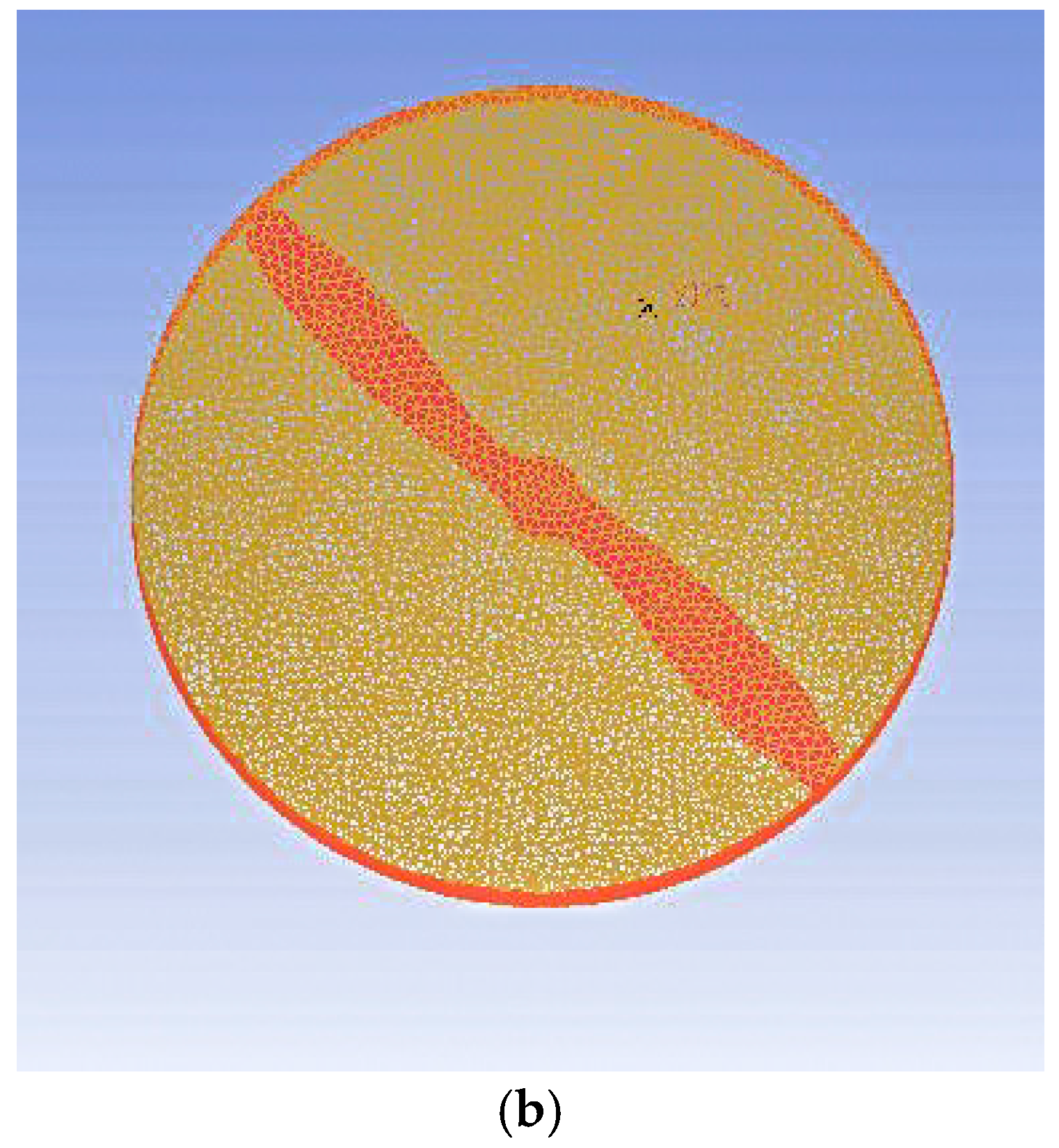
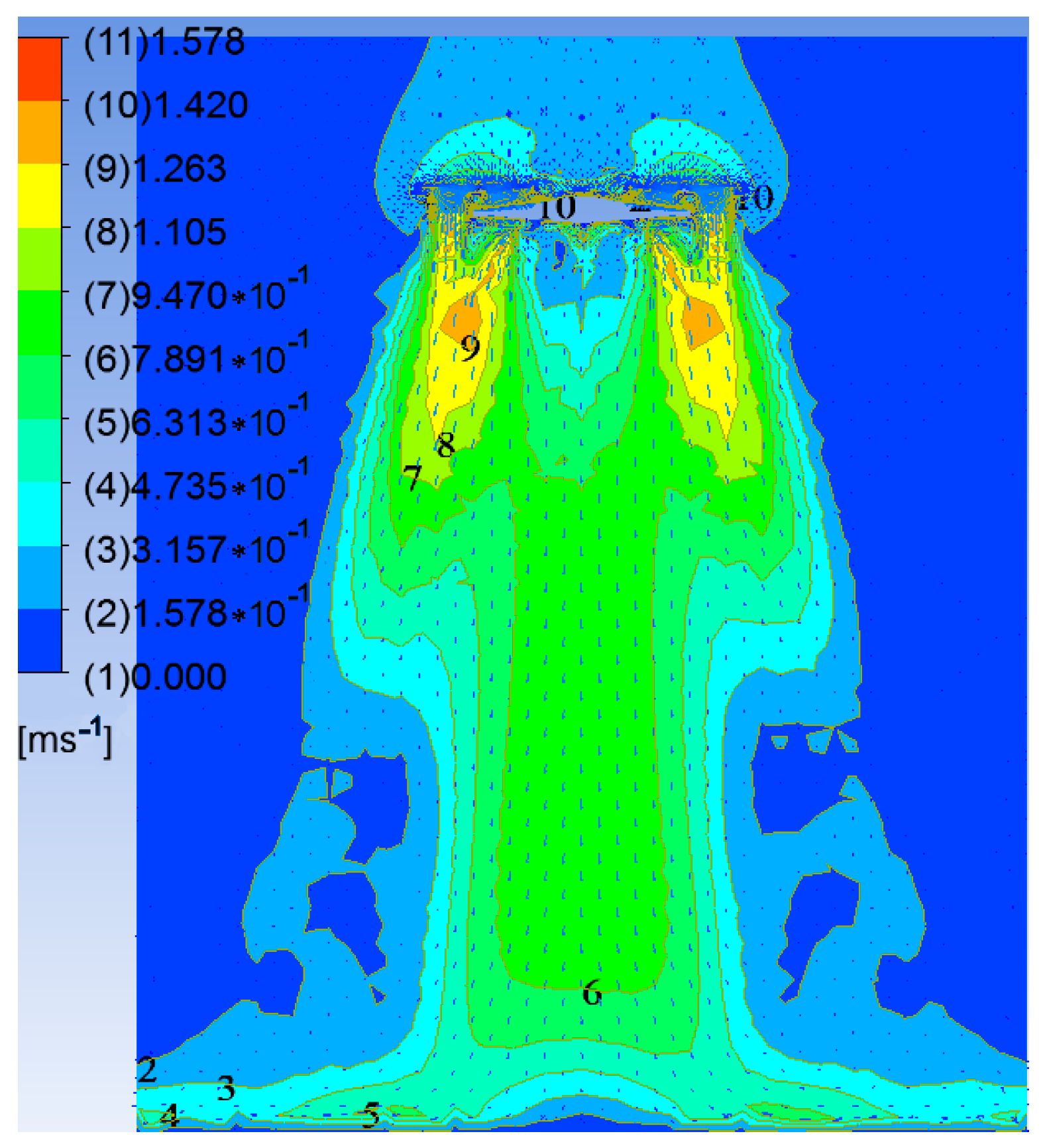
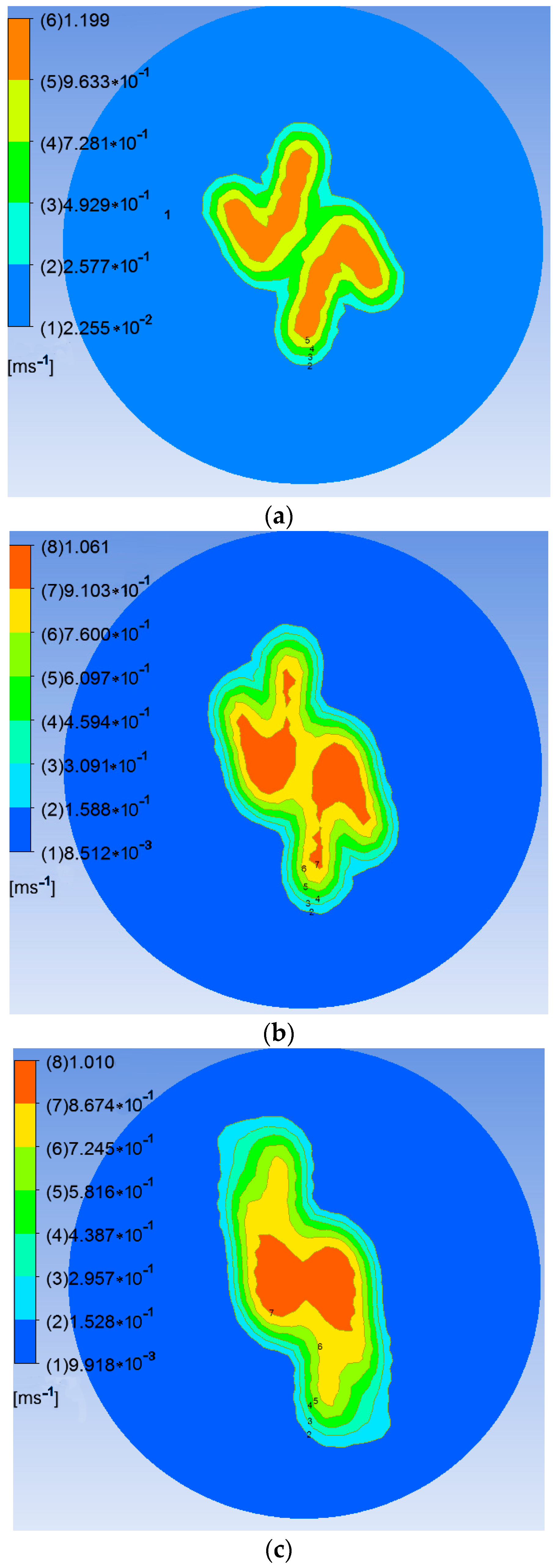
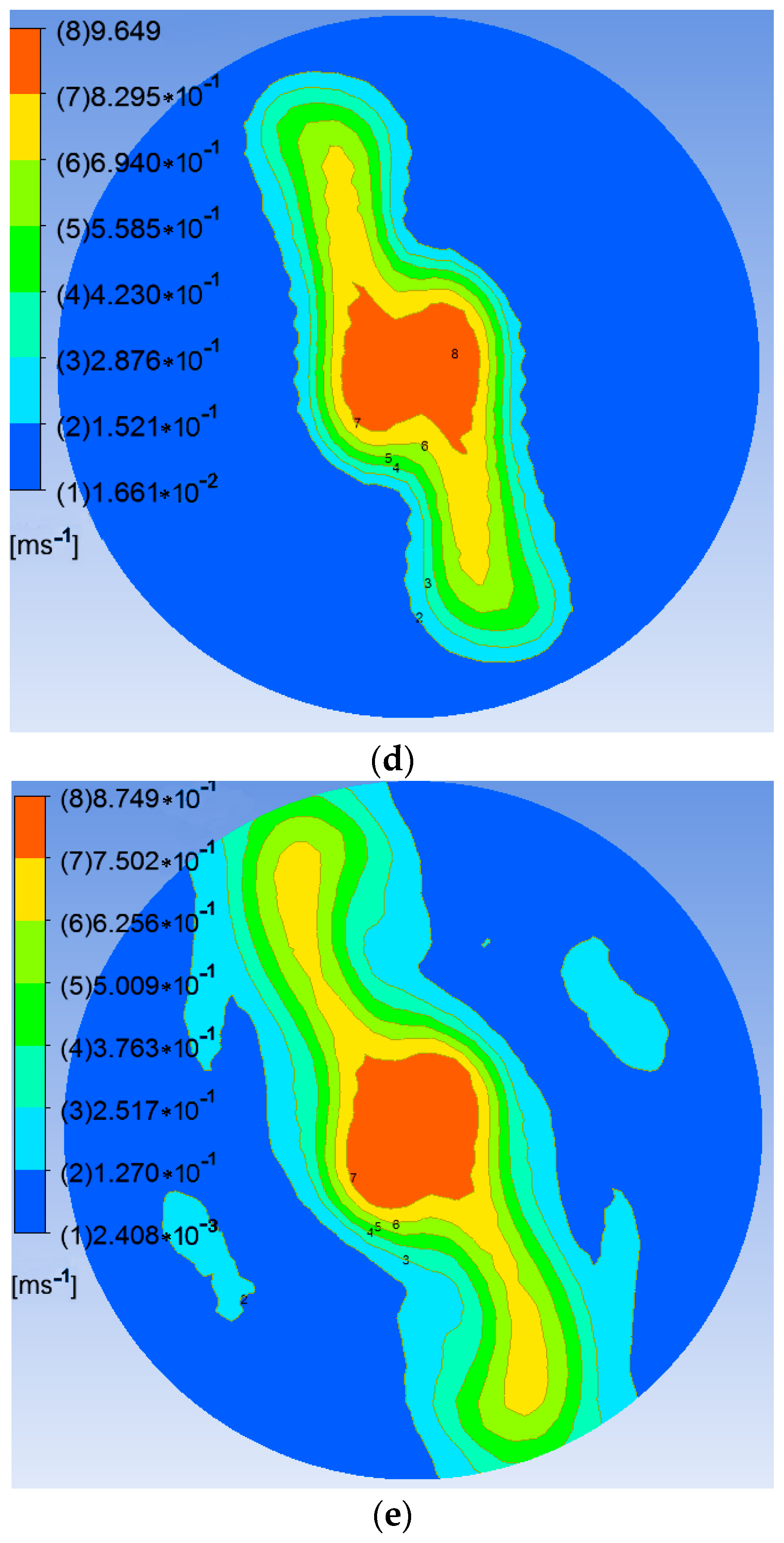
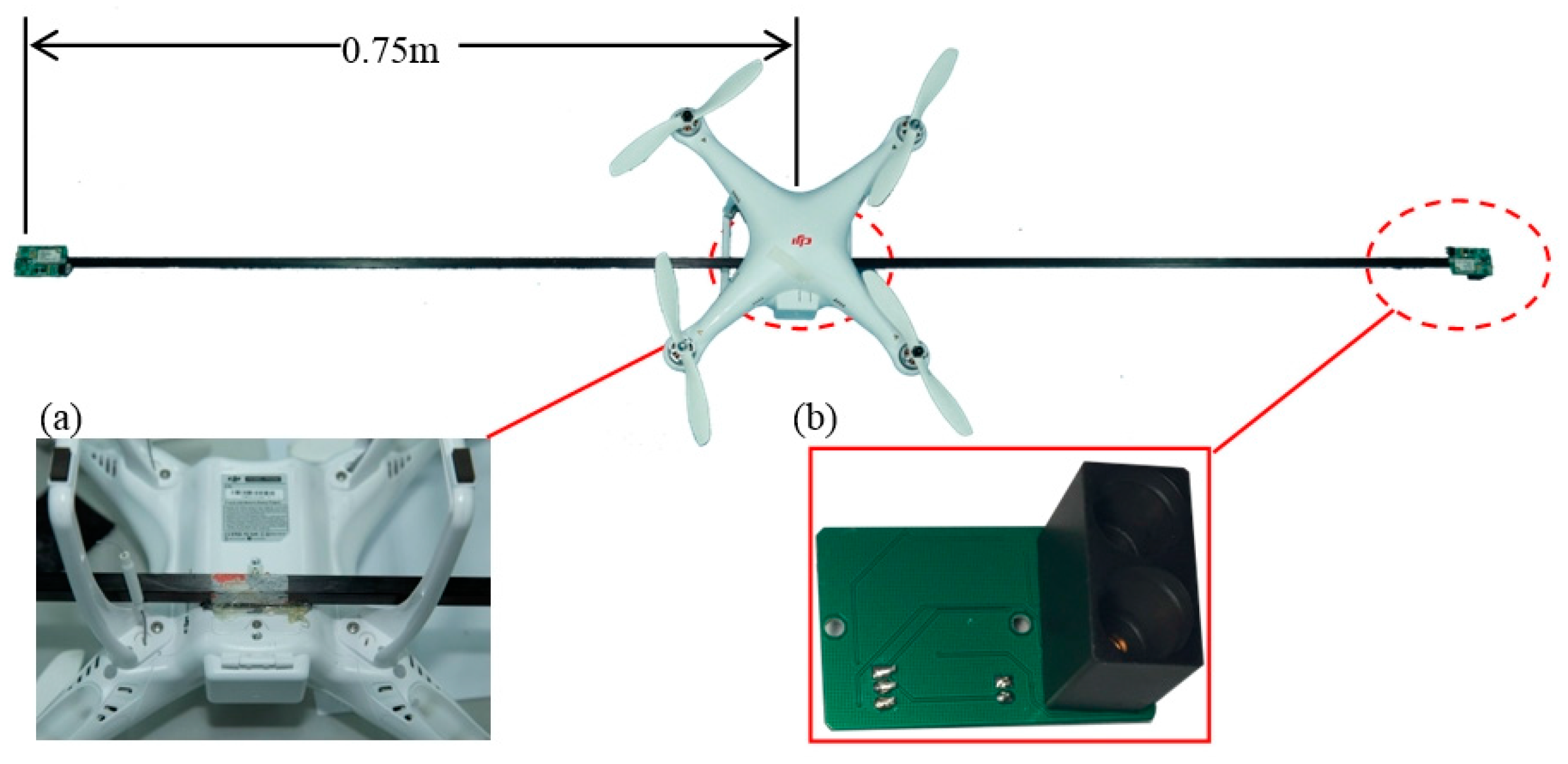
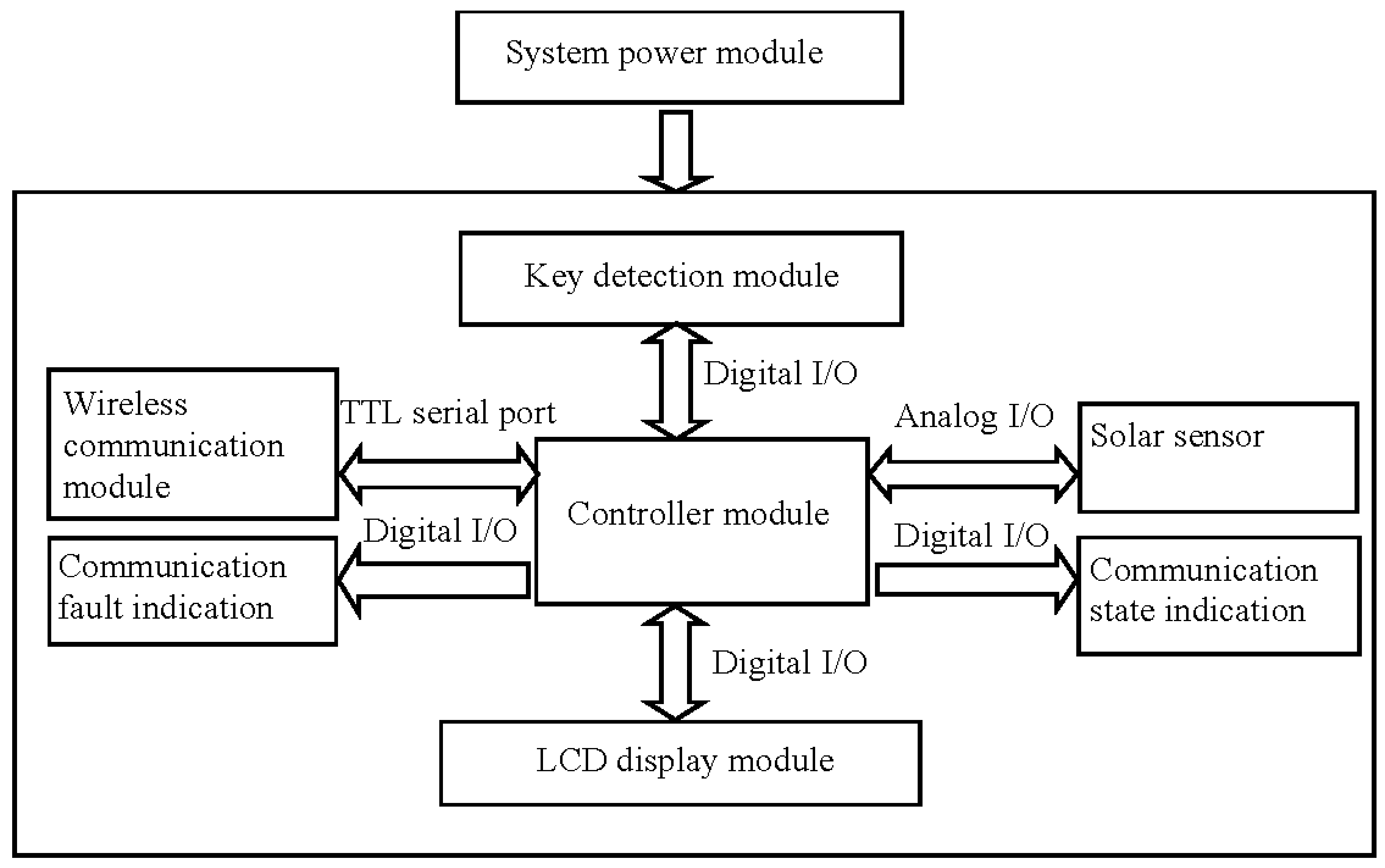
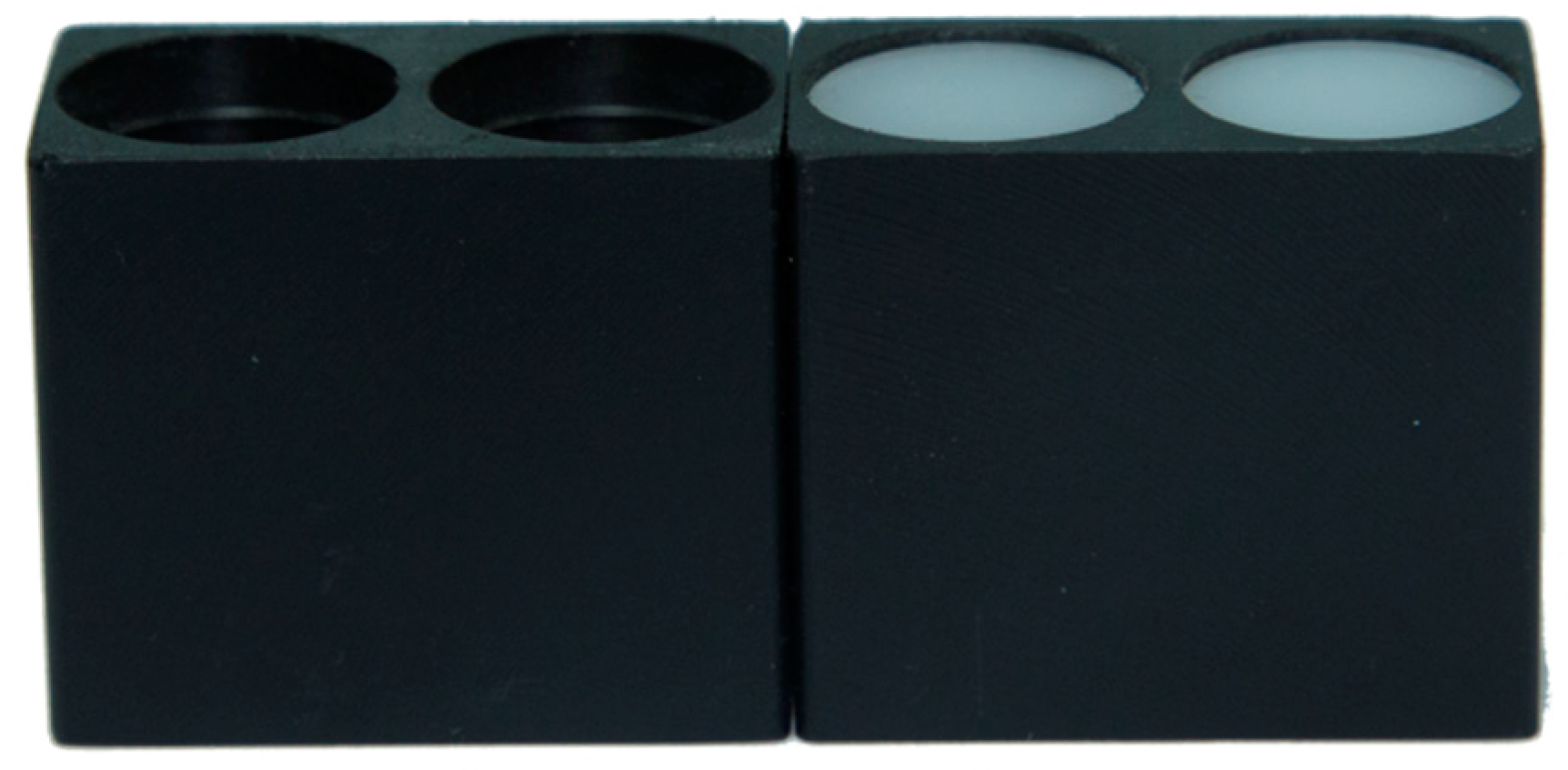
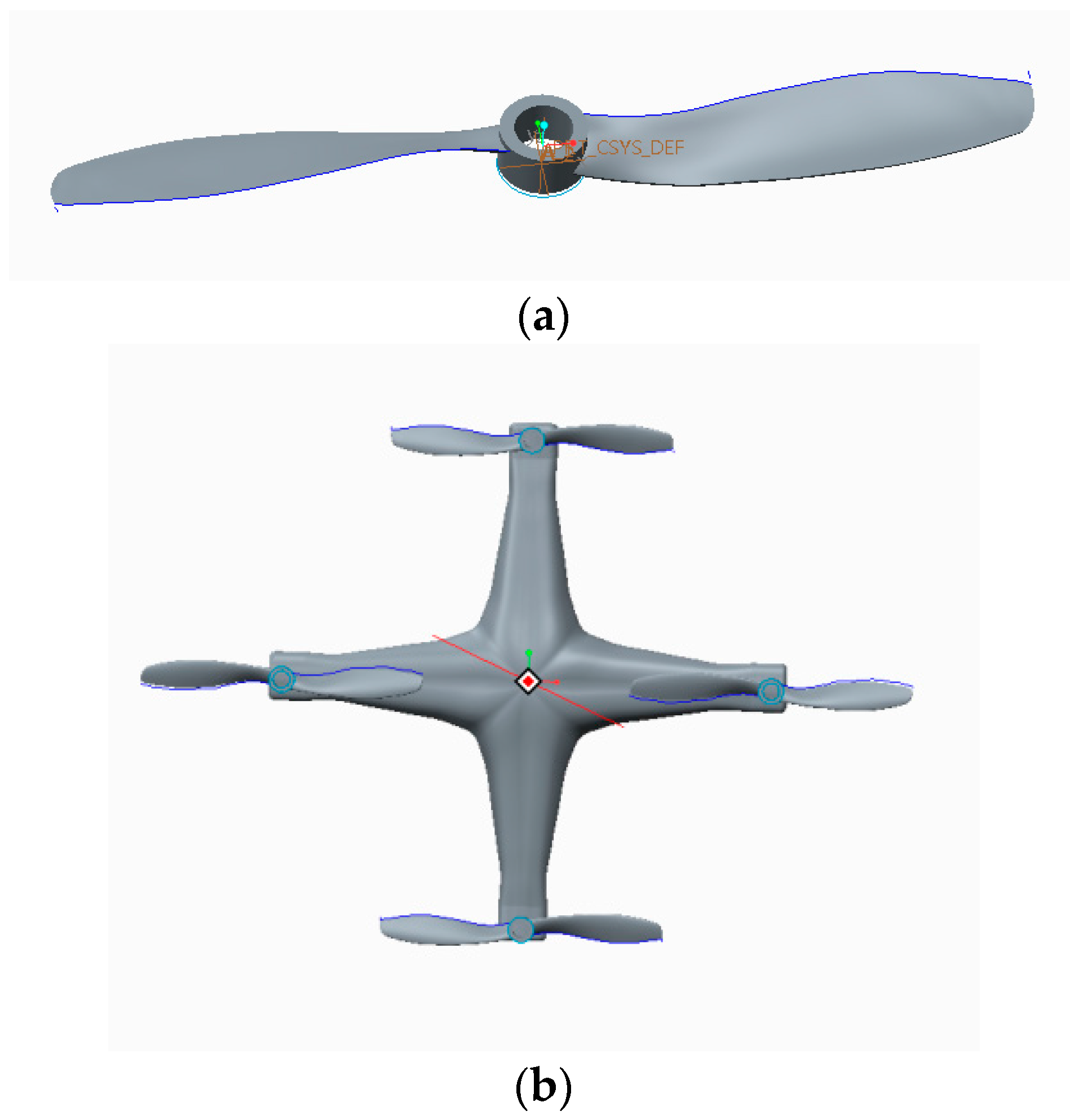
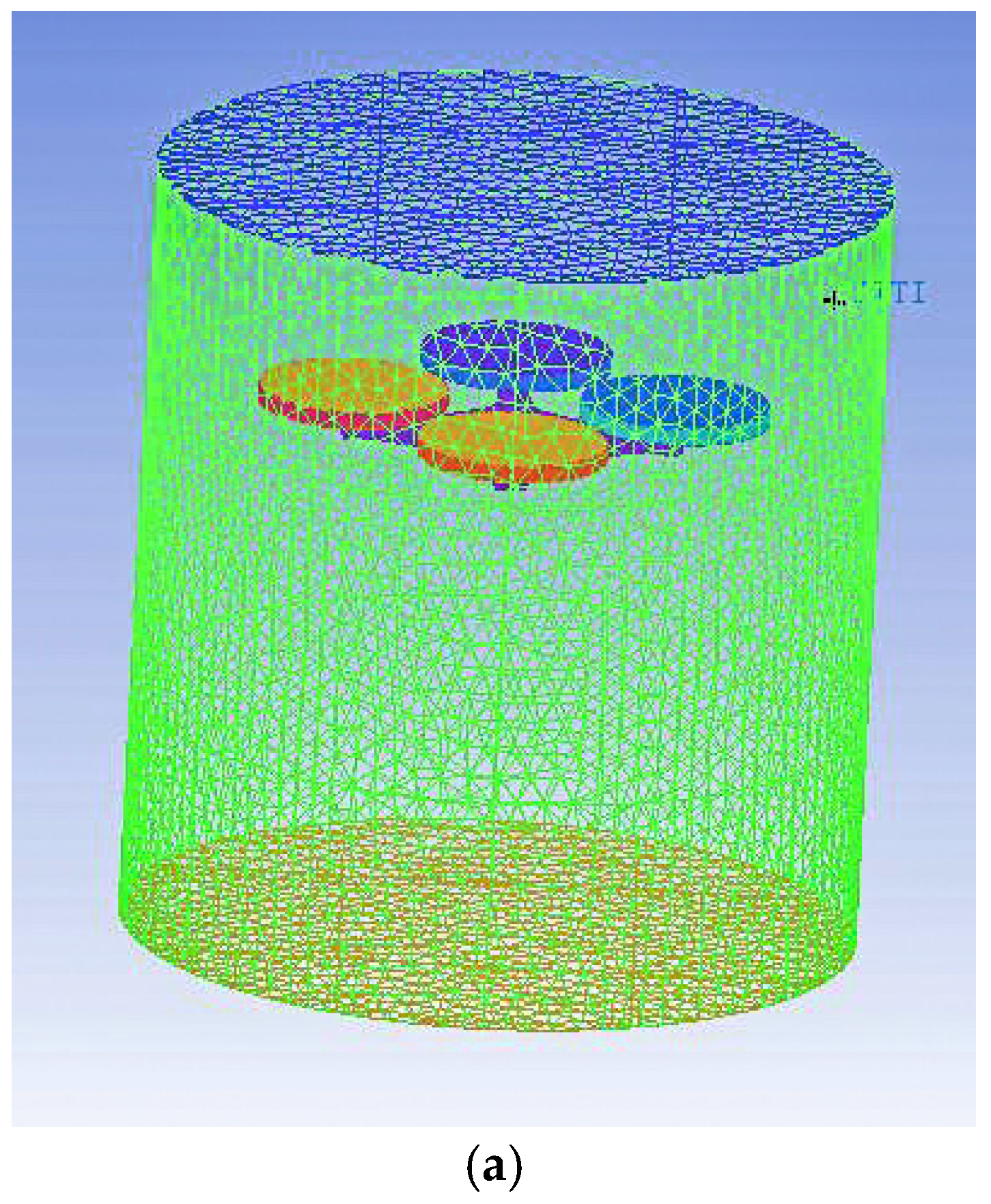
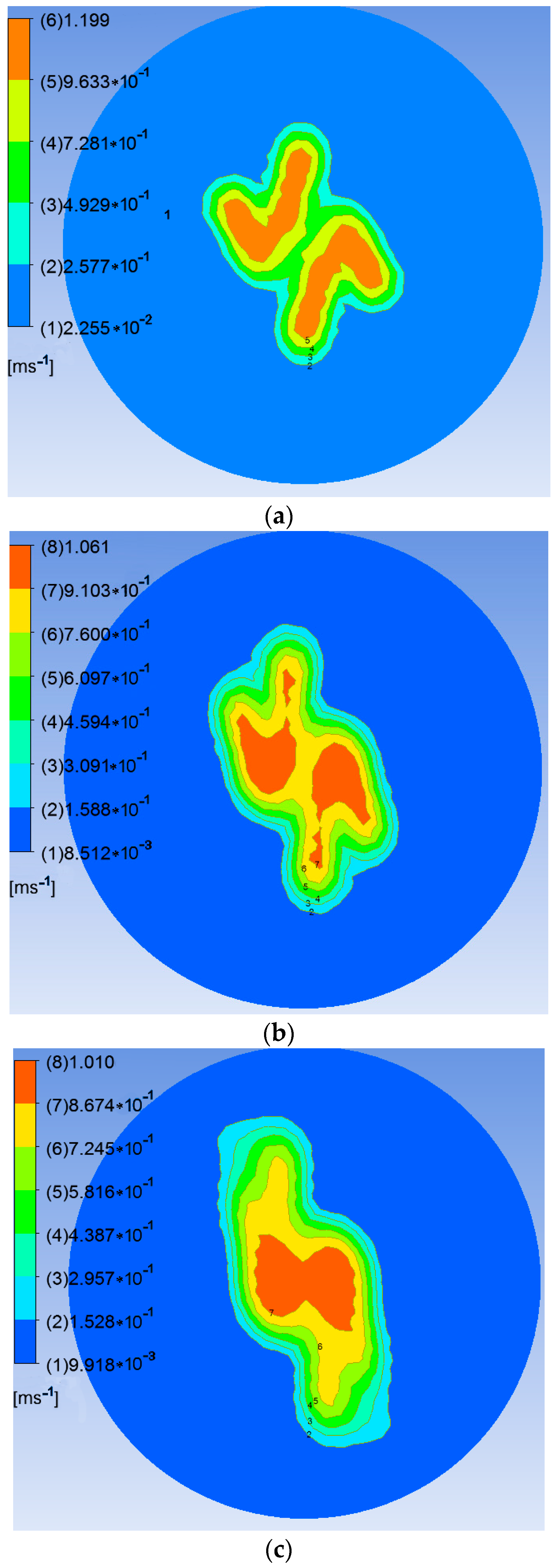
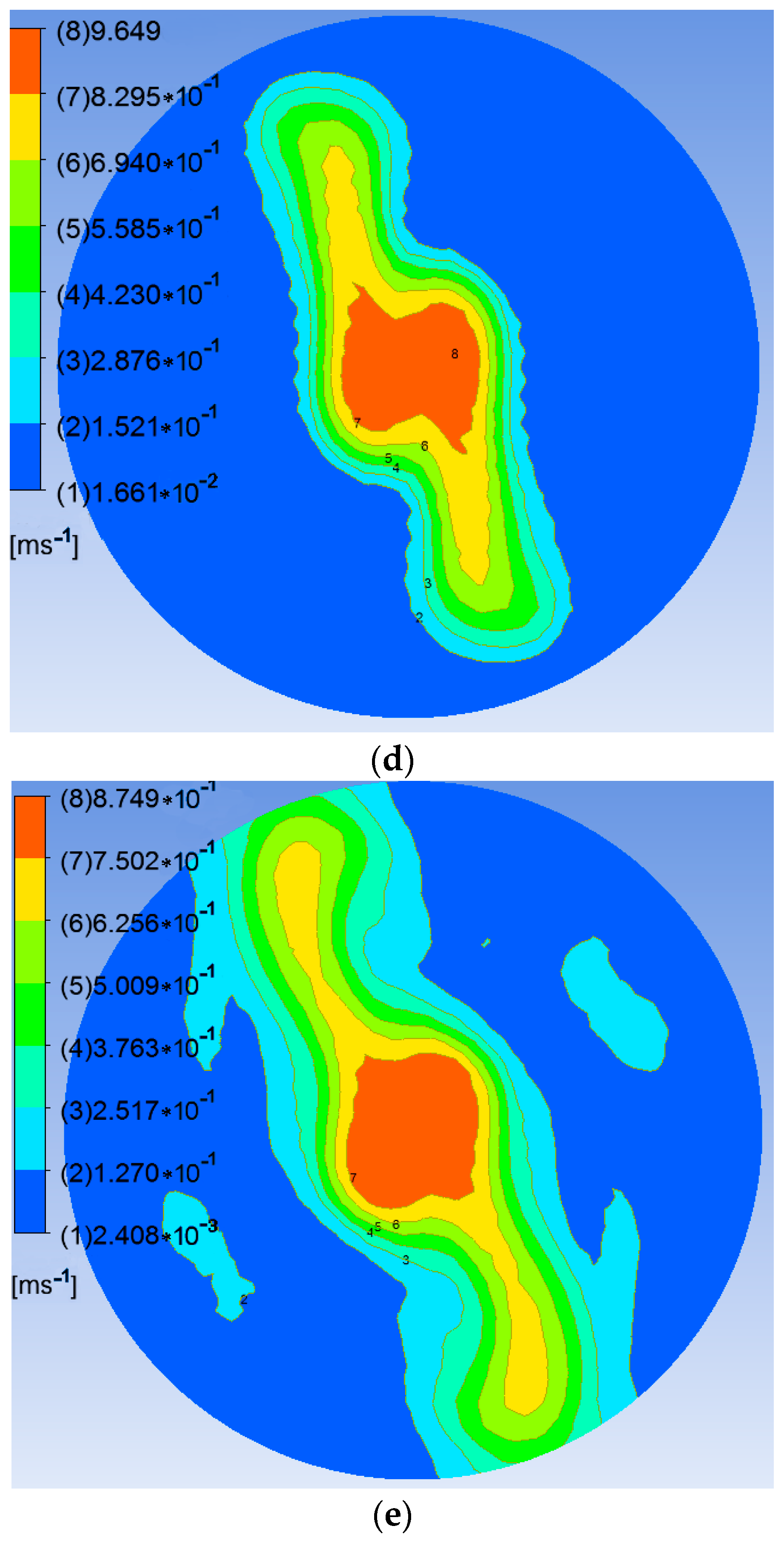
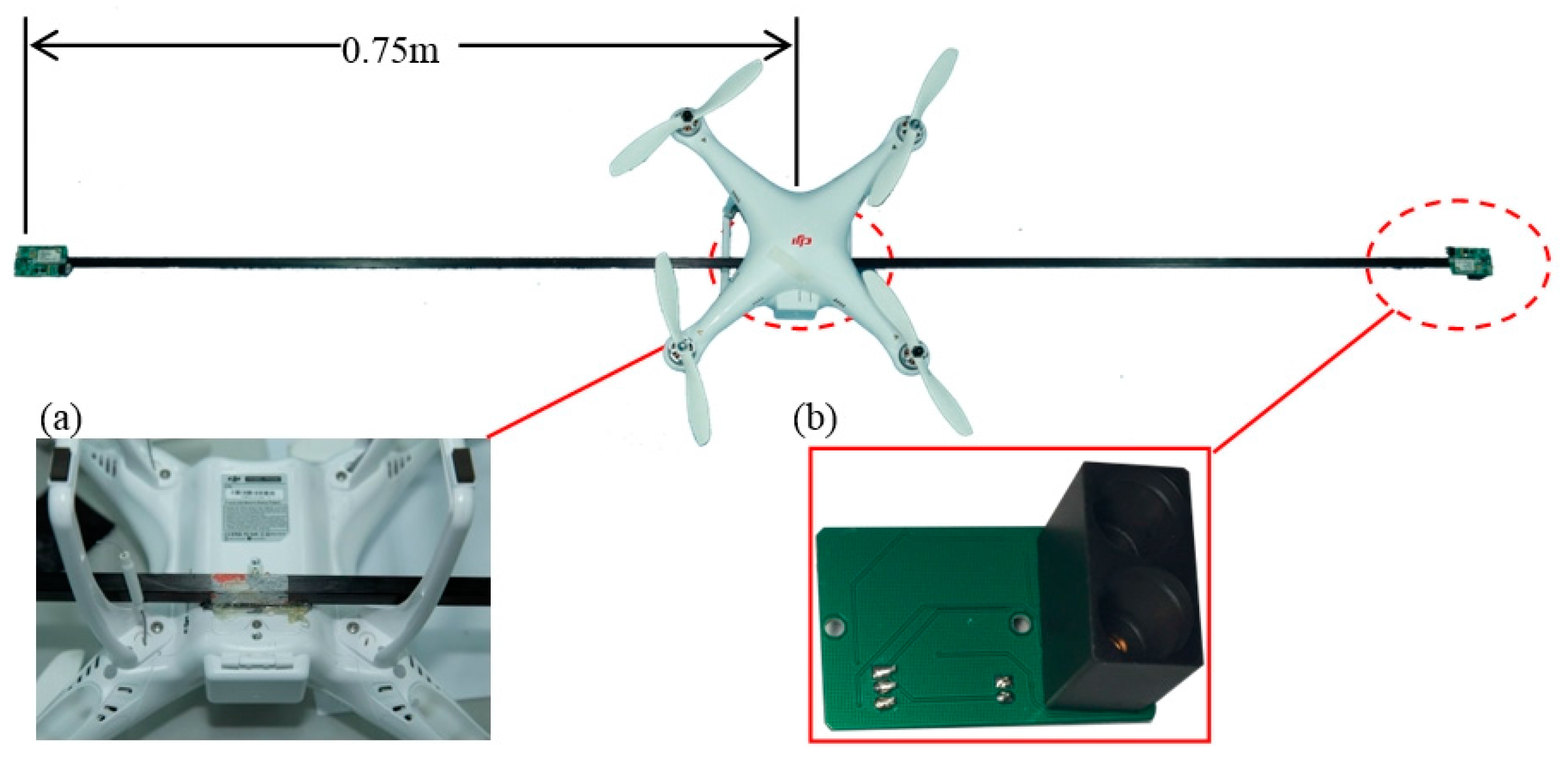
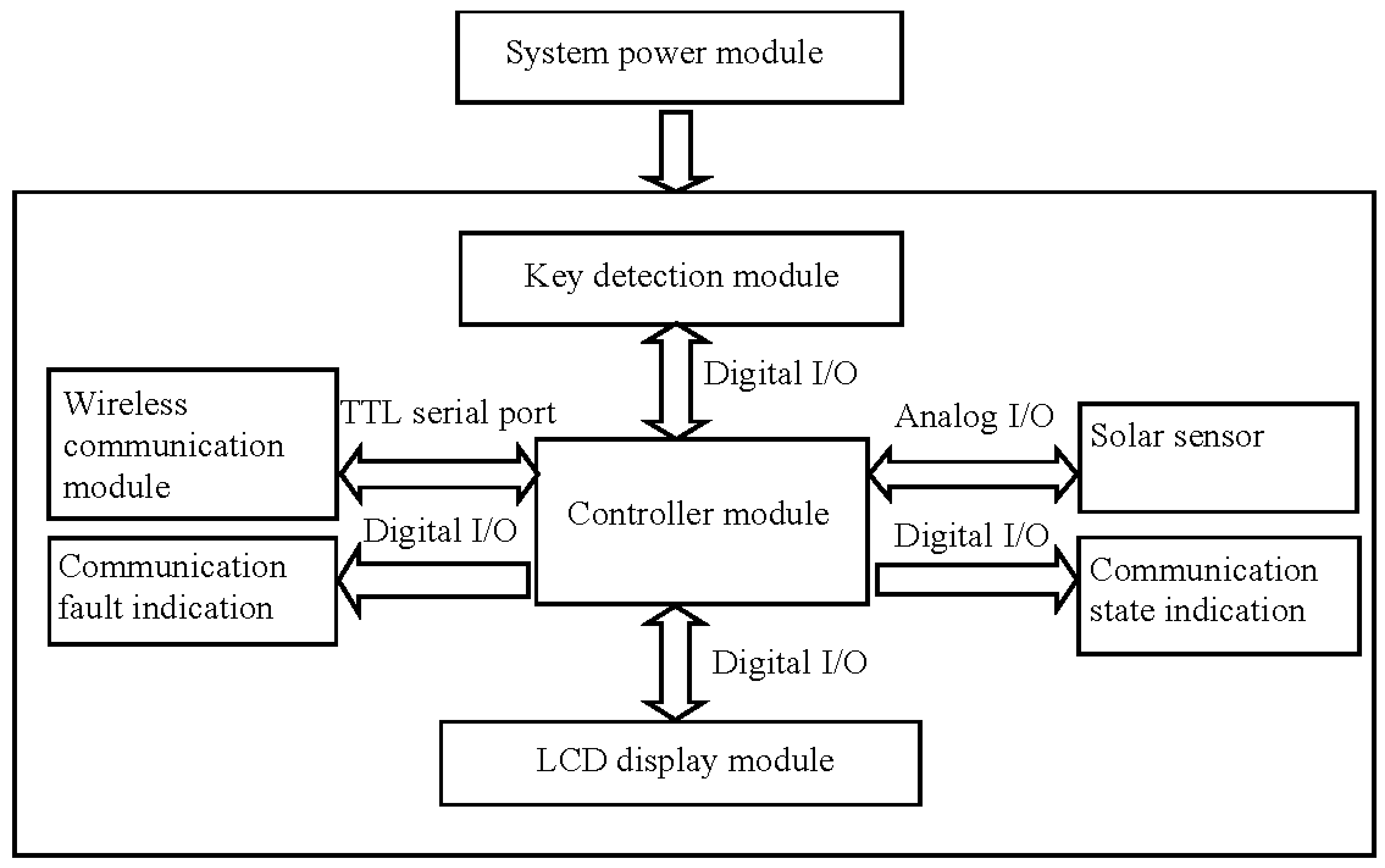
The research developed a UAV-borne crop-growth monitoring system for on-line, and real-time, acquisition of continuous, high-throughput, information about crop growth. Much attention was paid to the design of the matching UAV-borne crop-growth sensor and the crop-growth monitoring system for UAVs. For the former, the key point in the design is to ensure that the working field of view of the downward-looking optical sensor is crop canopies without airflow disturbance. Through CFD simulations, spatial distributions were obtained for the UAV down-wash flow fields on the surface of the crop canopy. Influenced by the high-speed rotation of the rotors, the down-wash flow fields form a trail in the circumferential direction whose speed gradually decreases. When the UAV is 1.2 m from the crop canopy, the maximum velocity is 0.87 m/s on the surface of the crop canopy and the maximum width of the flow field is 0.60 m. Owing to the field angle of the multispectral crop-growth sensor being 27°, the field radius is about 0.29 m when the UAV hovers at 1.2 m above the canopy. In addition, considering the maximum width of the down-wash flow fields, the size of the UAV body, and field radius of the sensor, the sensor support was designed to be 1.5 m long, with which the multispectral crop-growth sensor was integrated with the UAV. It overcomes shortcomings of hand-held multispectral crop-growth sensors such as their small monitoring region, labour-intensity, and discontinuous monitoring: it also improves the test efficiency. As for the UAV-borne crop-growth monitoring system, it needs to be designed to be capable of timeous processing and on-line interpretation of the acquired data. To this end, wireless communication technology is used to transmit information obtained by the UAV-borne crop-growth sensor to the ground-based data processor in real-time. In addition, with the application of a single-chip microcomputer, the information obtained by the sensor and the crop-growth monitoring model is integrated, which overcomes the hysteresis induced by off-line interpretation of existing UAV-borne remote sensing data.
Meanwhile, this new UAV-borne crop-growth monitoring sensor can be operated at two wavelengths, which remains insufficient for the types of vegetation indices required. Therefore the authors plan to develop crop-growth monitoring sensors capable of working at a greater number of wavelengths in future studies, so as to establish more vegetation indices able to predict crop-growth indices and therefore improve prediction accuracy and stability.
4. Conclusions
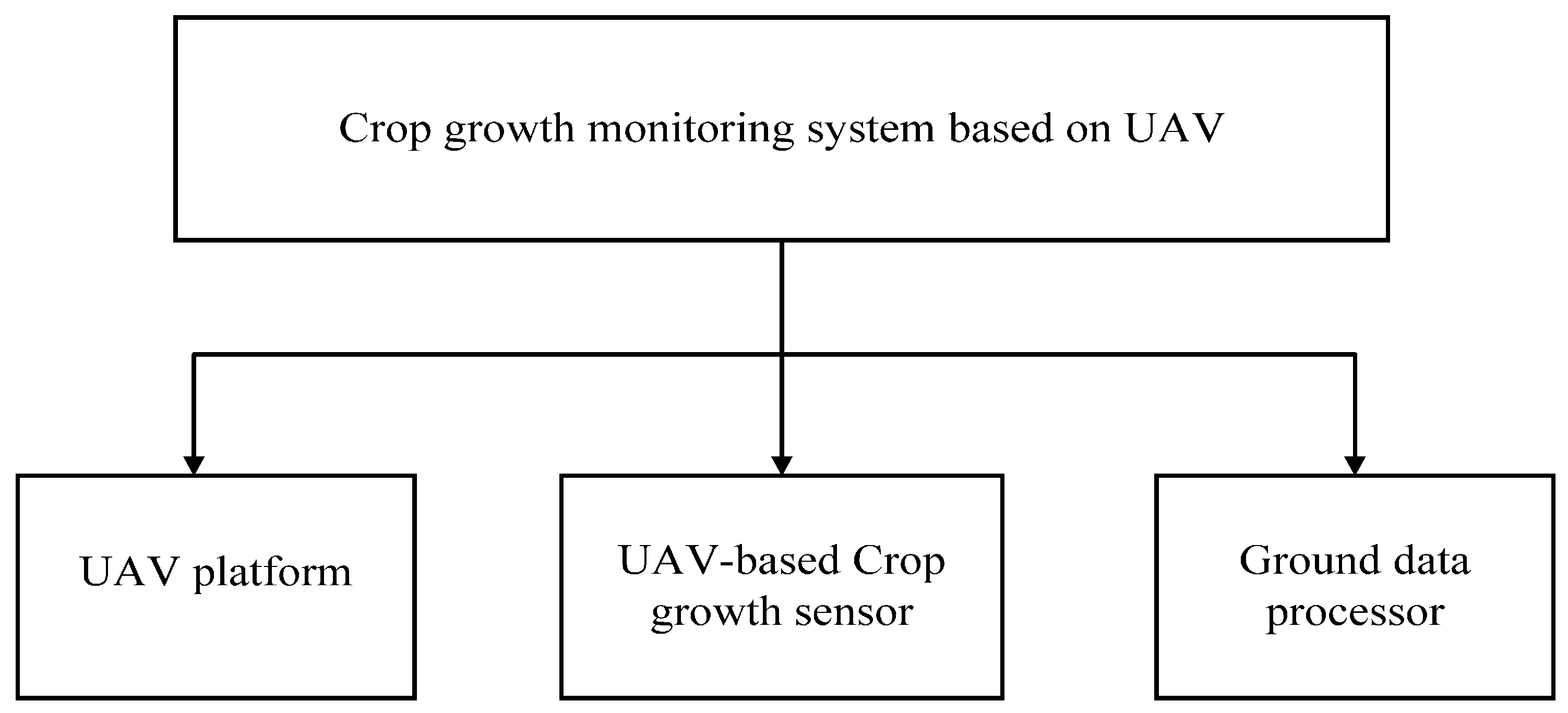
(1) The DJI Phantom quad-rotor UAV can be used as an operating platform to create a matched crop-growth monitoring system. This complete system combines the UAV platform, a UAV-borne crop-growth sensor, and a ground-based data processor. The system can continuously and conveniently obtain the NDVI and RVI values of the crop canopy online (as well as growth indices including LNA, LAI, and LDW) with high throughput and is not limited by the terrain.
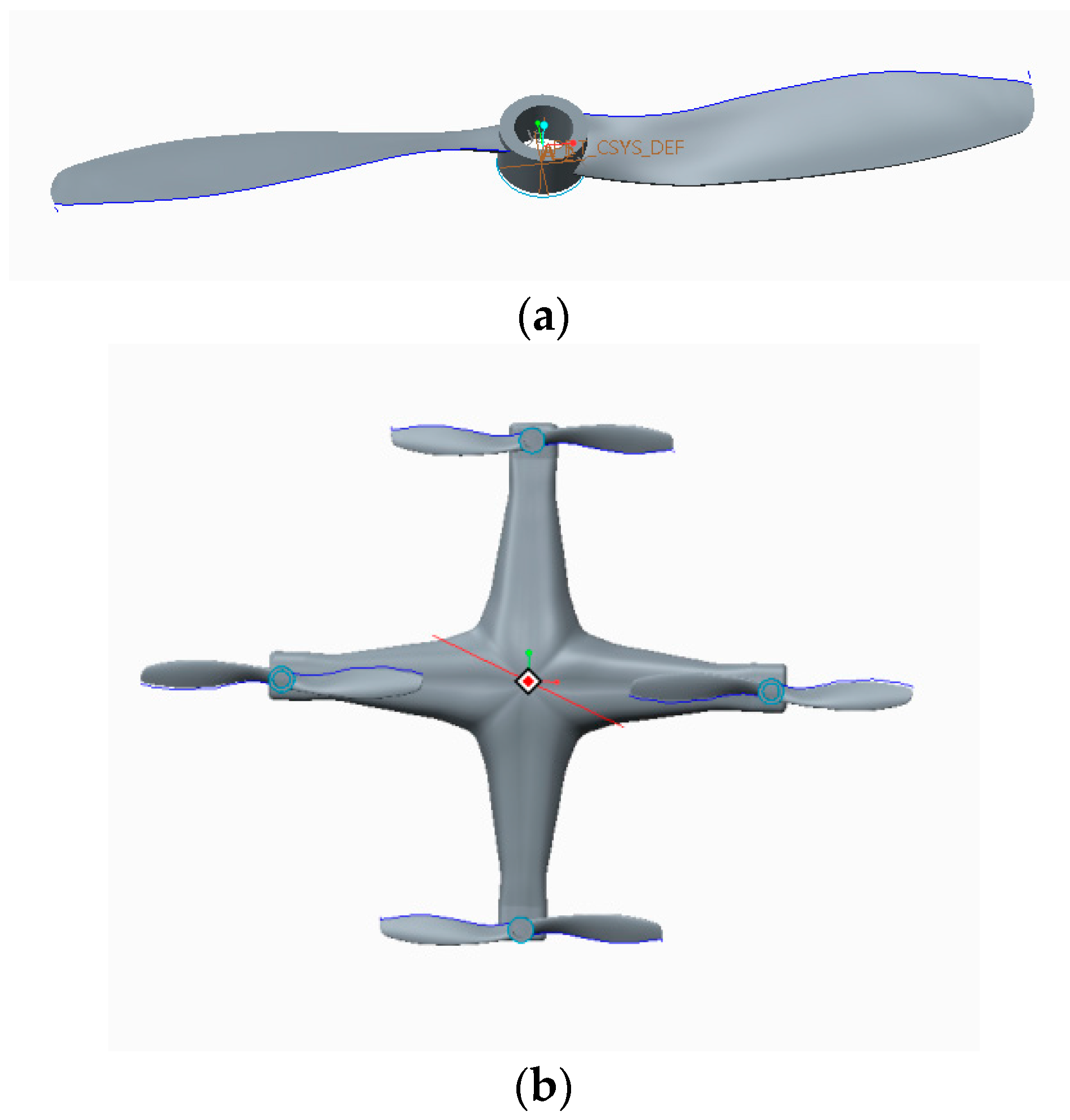
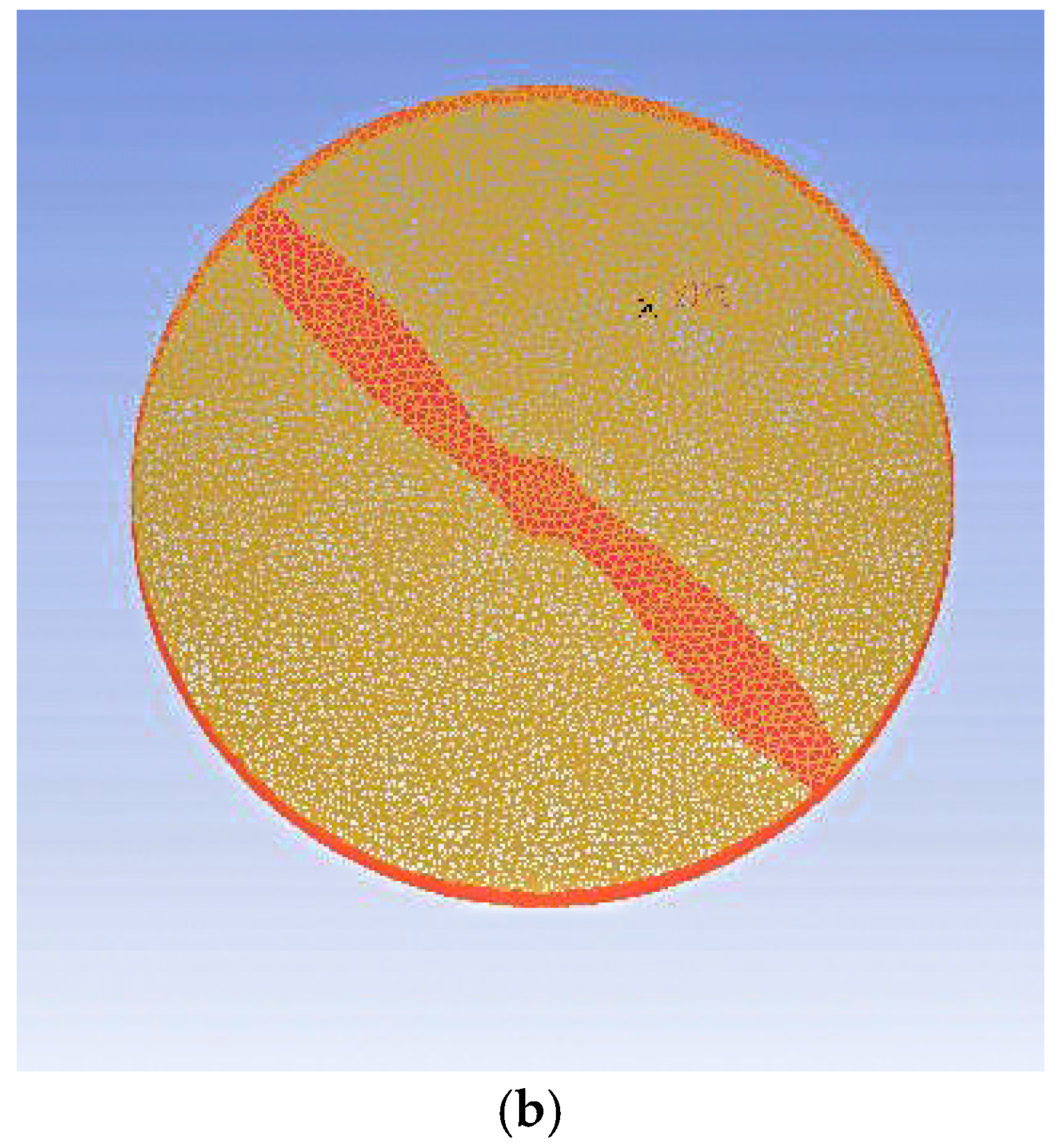
(2) Numerical CFD simulations were conducted to investigate the spatial distribution of the down-wash flow fields from the DJI phantom quad-rotor UAV at the surface of the crop canopy. The results show that the airflow is mainly distributed underneath the rotors, and the speed of the airflow below the UAV body is obviously slower. On reaching the crop canopy, the airflow spreads around and its velocity falls. The airflow velocity in horizontal planes below the rotors gradually decreases as the vertical distance from the rotors increases. The maximum velocity is 1.2 m/s at 0.4 m from the rotors and 0.87 m/s at 1.2 m from the rotors. With increasing vertical distance from the rotors, the airflow area gradually increases. The maximum width of the flow field is 0.60 m in the plane 1.2 m from the rotors. On this basis, the length of the sensor support was chosen to be 1.5 m. The solar sensor and two-band sensors were fixed onto the two ends of the support, and this is installed on the UAV so that it passes through the geometrical center of the UAV’s abdomen. This arrangement can effectively avoid the down-wash flow fields below the UAV significantly affecting measurement of the reflection spectra of the crop canopy.
(3) The improved, lightweight UAV-borne crop-growth sensor showed good stability and measurement precision over the range of operating altitudes required of the sensor. When measuring at elevations 0.4 and 1.0 m from the wheat canopy, the stability variance of the NDVI values output by the sensor was determined to be 0.03 and the maximum deviation coefficient was 3.78%. The RVI and NDVI values output by the sensor vary linearly with those obtained by an ASD spectrometer (determination coefficients of 0.82 and 0.77 and RMSEs of 0.17 and 0.05, respectively). Tests of the UAV-borne sensor and UAV show that the designed size and installation position of the sensor support are reasonable and that the effects of in-flight vibration and down-wash are small. Over the operating range of altitudes of the sensor, the monitoring system demonstrated high dynamic stability and measurement precision. When the UAV hovered at 0.4–1.2 m above the canopy (at its rated rotor speed), the stability variance of the NDVI values output by the sensor was determined to be 0.0034 and the maximum deviation coefficient was 5.30%. In addition, the RVI and NDVI values output by the sensor are linearly related to those obtained by the ASD spectrometer (determination coefficients of 0.74 and 0.75, and RMSEs of 0.18 and 0.04, respectively).
(4) The UAV-borne crop-growth sensor performed well when it came to monitoring the growth indices of wheat. The determination coefficients (R2) of the linear fits between the output RVI values and LNA, LAI, and LDW values were 0.63, 0.69, and 0.66, respectively, and the RMSEs were 1.42, 1.02 and 3.09, respectively. The equivalent figures for the output NDVI values are 0.60, 0.65, and 0.62 (for LNA, LAI, and LDW, respectively), and the RMSEs are 1.44, 1.01 and 3.01, respectively.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}