Validation of Foot Placement Locations from Ankle Data of a Kinect v2 Sensor



Abstract
1. Introduction
2. Methods
2.1. Subjects
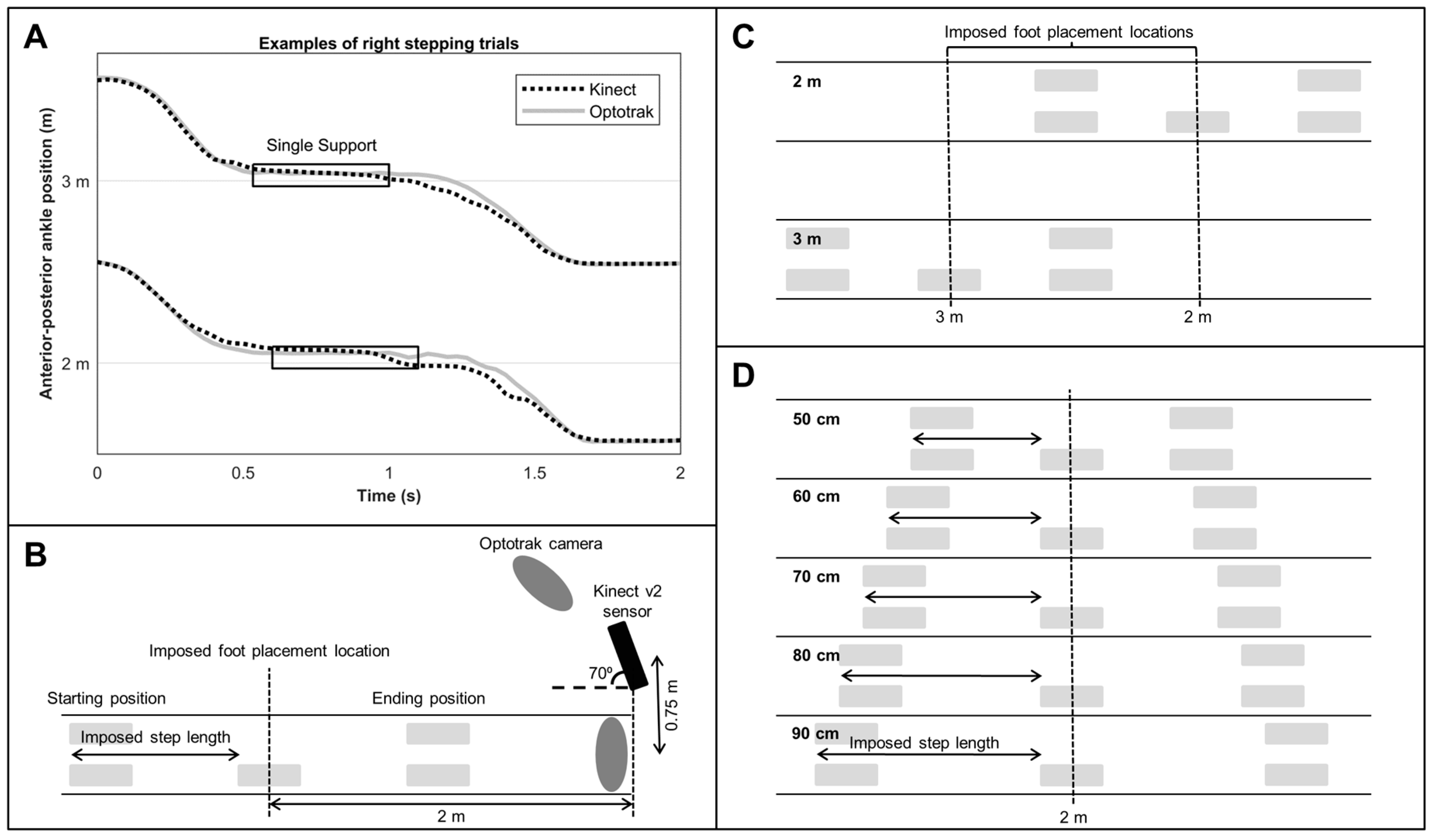
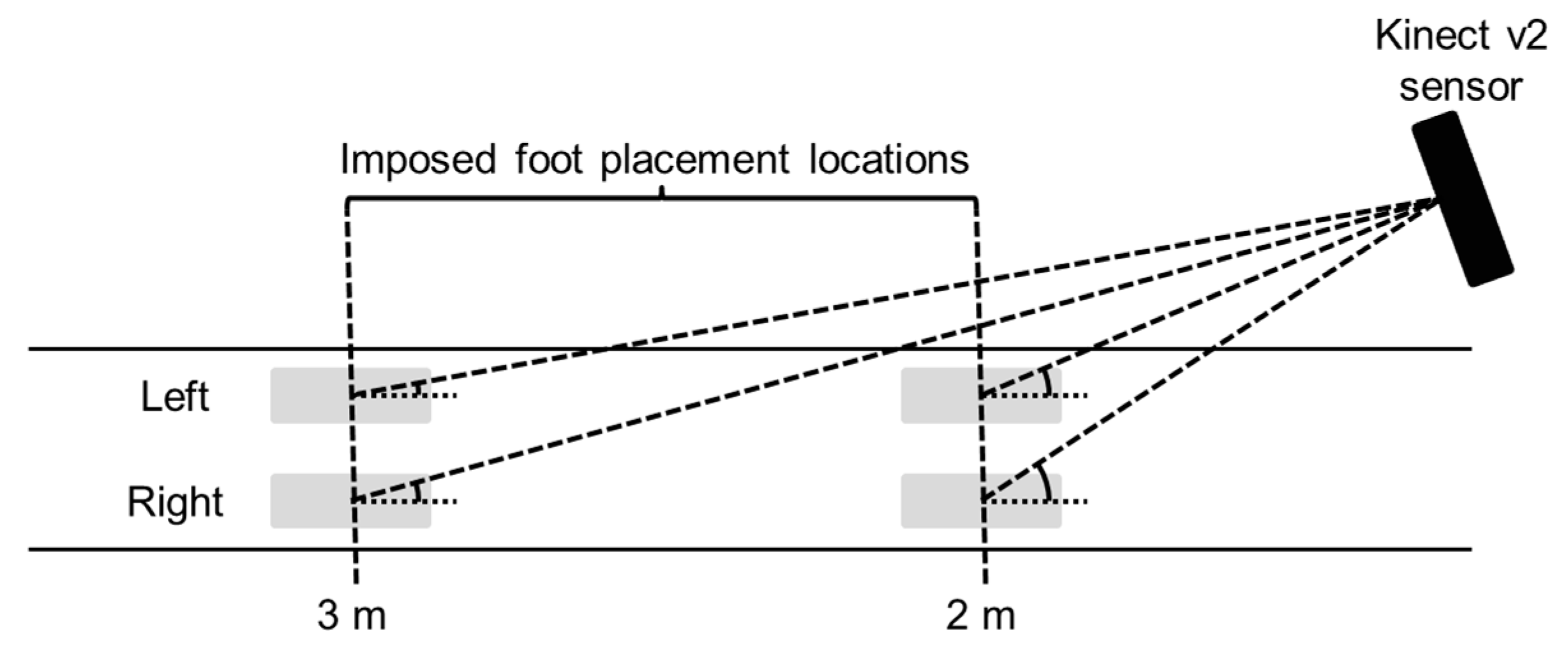
2.2. Experimental Set-Up and Procedure
2.3. Data Pre-Processing and Analysis
2.4. Statistical Analysis
3. Results
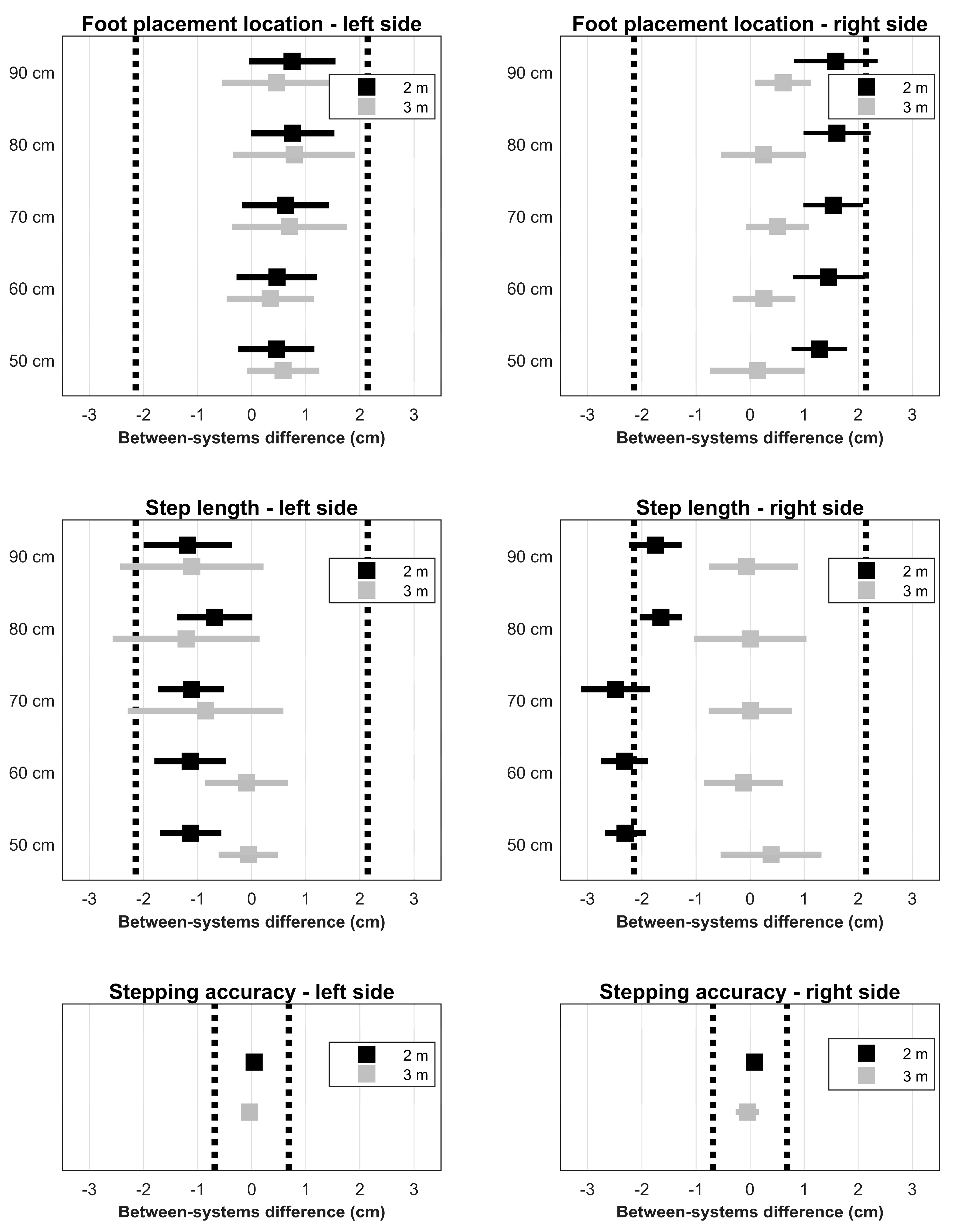
3.1. Foot Placement Locations
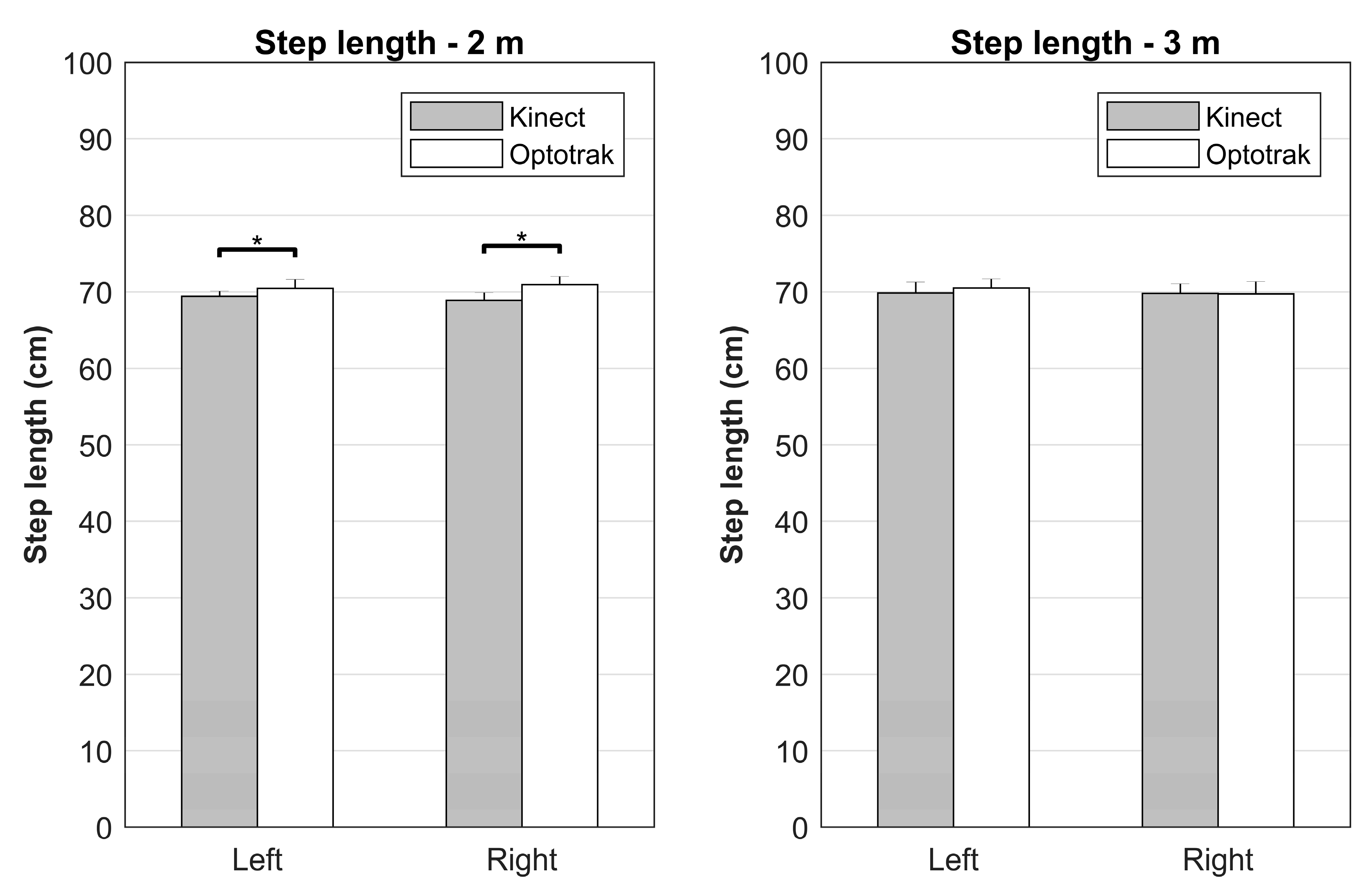
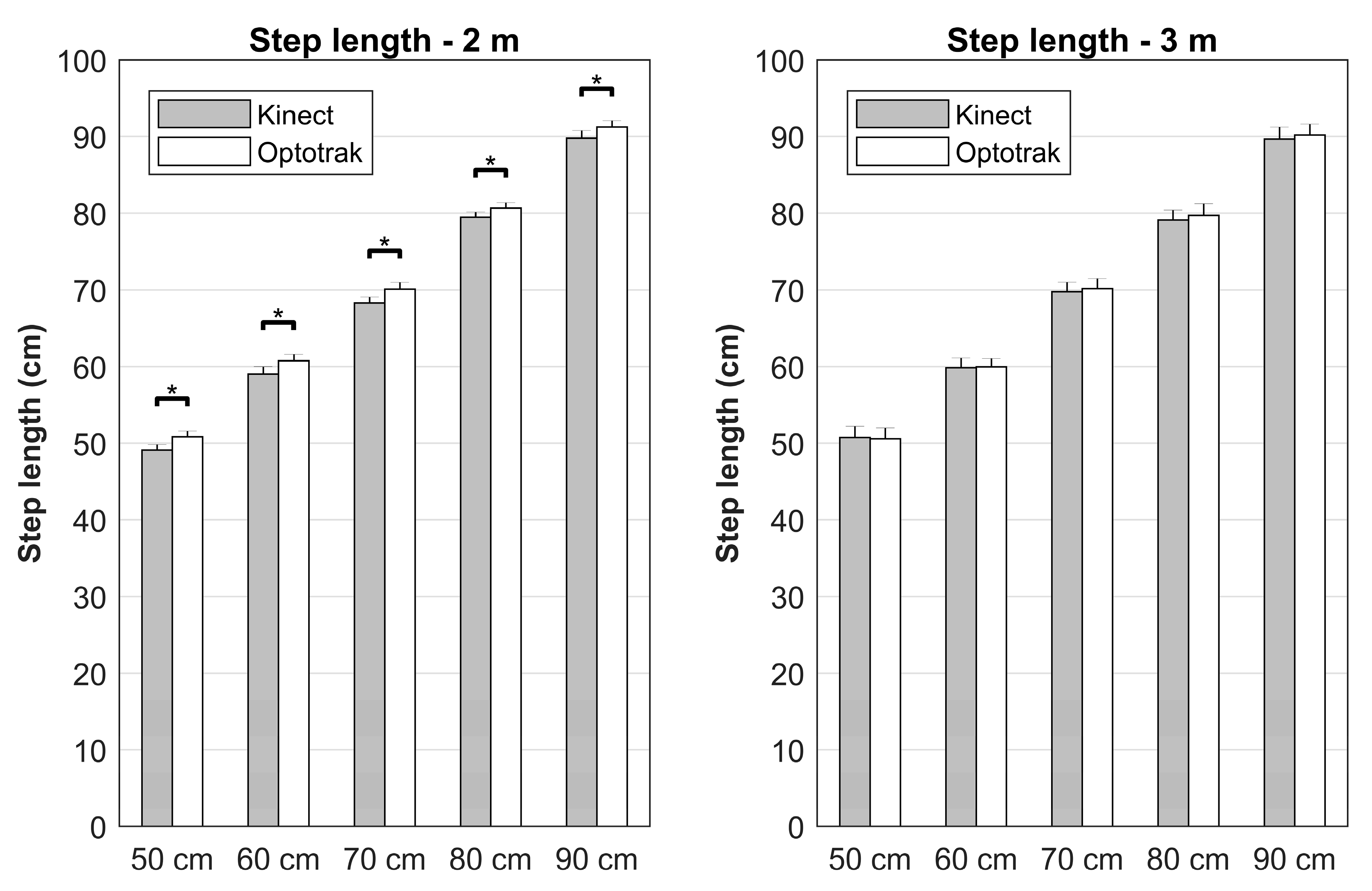
3.2. Step Length
3.3. Stepping Accuracy
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Simon, S.R. Quantification of human motion: Gait analysis—Benefits and limitations to its application to clinical problems. J. Biomech. 2004, 37, 1869–1880. [Google Scholar] [CrossRef] [PubMed]
- Shotton, J.; Fitzgibbon, A.; Cook, M.; Sharp, T.; Finocchio, M.; Moore, R.; Kipman, A.; Blake, A. Real-time human pose recognition in parts from single depth images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011. [Google Scholar]
- Dolatabadi, E.; Taati, B.; Mihailidis, A. Concurrent validity of the Microsoft Kinect for Windows v2 for measuring spatiotemporal gait parameters. Med. Eng. Phys. 2016, 38, 952–958. [Google Scholar] [CrossRef] [PubMed]
- Eltoukhy, M.; Kuenze, C.; Oh, J.; Jacopetti, M.; Wooten, S.; Signorile, J. Microsoft Kinect can distinguish differences in over-ground gait between older persons with and without Parkinson’s disease. Med. Eng. Phys. 2017, 44, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Eltoukhy, M.; Oh, J.; Kuenze, C.; Signorile, J. Improved kinect-based spatiotemporal and kinematic treadmill gait assessment. Gait Posture 2017, 51, 77–83. [Google Scholar] [CrossRef] [PubMed]
- Geerse, D.J.; Coolen, B.H.; Roerdink, M. Kinematic validation of a multi-Kinect v2 instrumented 10-meter walkway for quantitative gait assessments. PLoS ONE 2015, 10, e0139913. [Google Scholar] [CrossRef] [PubMed]
- Geerse, D.J.; Coolen, B.H.; Roerdink, M. Walking-adaptability assessments with the Interactive Walkway: Between-systems agreement and sensitivity to task and subject variations. Gait Posture 2017, 54, 194–201. [Google Scholar] [CrossRef] [PubMed]
- Mentiplay, B.F.; Perraton, L.G.; Bower, K.J.; Pua, Y.H.; McGaw, R.; Heywood, S.; Clark, R.A. Gait assessment using the Microsoft Xbox One Kinect: Concurrent validity and inter-day reliability of spatiotemporal and kinematic variables. J. Biomech. 2015, 48, 2166–2170. [Google Scholar] [CrossRef] [PubMed]
- Müller, B.; Ilg, W.; Giese, M.A.; Ludolph, N. Validation of enhanced Kinect sensor based motion capturing for gait assessment. PLoS ONE 2017, 12, e0175813. [Google Scholar] [CrossRef] [PubMed]
- Springer, S.; Seligmann, G.Y. Validity of the Kinect for gait assessment: A focused review. Sensors 2016, 16, 194. [Google Scholar] [CrossRef] [PubMed]
- Clark, R.A.; Bower, K.J.; Mentiplay, B.F.; Paterson, K.; Pua, Y. Concurrent validity of the Microsoft Kinect for assessment of spatiotemporal gait variables. J. Biomech. 2013, 46, 2722–2725. [Google Scholar] [CrossRef] [PubMed]
- Clark, R.A.; Pua, Y.H.; Oliveira, C.C.; Bower, K.J.; Thilarajah, S.; McGaw, R.; Hasanki, K.; Mentiplay, B.F. Reliability and concurrent validity of the Microsoft Xbox One Kinect for assessment of standing balance and postural control. Gait Posture 2015, 42, 210–213. [Google Scholar] [CrossRef] [PubMed]
- Otte, K.; Kayser, B.; Mansow-Model, S.; Verrel, J.; Paul, F.; Brandt, A.U.; Schmitz-Hübsch, T. Accuracy and reliability of the Kinect version 2 for clinical measurement of motor function. PLoS ONE 2016, 11, e0166532. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; McGorry, R.W. The validity of the first and second generation Microsoft Kinect™ for identifying joint center locations during static postures. Appl. Ergon. 2015, 49, 47–54. [Google Scholar] [CrossRef] [PubMed]
- Pagliari, D.; Pinto, L. Calibration of Kinect for Xbox One and comparison between the two generations of Microsoft sensors. Sensors 2015, 15, 27569–27589. [Google Scholar] [CrossRef] [PubMed]
- Zeni, J.A.; Richards, J.G.; Higginson, J.S. Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 2008, 27, 710–714. [Google Scholar] [CrossRef] [PubMed]
- Girden, E.R. ANOVA: Repeated Measures; Sage University Paper Series on Quantitative Applications in the Social Sciences: Newbury Park, CA, USA, 1992. [Google Scholar]
- McGraw, K.O.; Wong, S.P. Forming inferences about some intraclass correlation coefficients. Psychol. Methods 1996, 1, 30–46. [Google Scholar] [CrossRef]
- Cicchetti, D.V. Guidelines, criteria, and rules of the thumb for evaluating normed and standardized assessment instruments in psychology. Psychol. Assess. 1994, 6, 284–290. [Google Scholar] [CrossRef]
- Bland, J.M.; Altman, D.G. Measuring agreement in method comparison studies. Stat. Methods Med. Res. 1999, 8, 135–160. [Google Scholar] [CrossRef] [PubMed]
- Ten Cate, D.F.; Luime, J.J.; Hazes, J.M.; Jacobs, J.W.; Landewé, R. Does the intraclass correlation coefficient always reliably express reliability? Comment on the article by Cheung et al. Arthritis Care Res. 2010, 62, 1357–1358. [Google Scholar] [CrossRef] [PubMed]
- Lakens, D. Equivalence tests: A practical primer for t-tests, correlations, and meta-analyses. Soc. Psychol. Pers. Sci. 2017, 8, 355–362. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Kurillo, G.; Ofli, F.; Bajcsy, R. Evaluation of pose tracking accuracy in the first and second generations of Microsoft Kinect. In Proceedings of the IEEE International Conference on Healthcare Informatics, Dallas, TX, USA, 21–23 October 2015. [Google Scholar]
- Auvinet, E.; Multon, F.; Aubin, C.E.; Meunier, J.; Raison, M. Detection of gait cycles in treadmill walking using a Kinect. Gait Posture 2015, 41, 722–725. [Google Scholar] [CrossRef] [PubMed]
- Auvinet, E.; Multon, F.; Meunier, J. New lower-limb gait asymmetry indices based on a depth camera. Sensors 2015, 15, 4605–4623. [Google Scholar] [CrossRef] [PubMed]
- Hotrabhavananda, B.; Mishra, A.K.; Skubic, M.; Hotrabhavananda, N.; Abbott, C. Evaluation of the Microsoft Kinect skeletal versus depth data analysis for timed-up and go and figure of 8 walk tests. In Proceedings of the IEEE Engineering in Medicine and Biology Society, Orlando, FL, USA, 16–20 August 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kinect v2 | Optotrak | TOST | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean ± SD | Mean ± SD | Bias [95% LoA] | ICC(A,1) | ICC(C,1) | p-Value | ||||
| Foot placement location (cm) | 2 m | Left | 50 cm | −0.02 ± 0.87 | −0.48 ± 1.33 | 0.46 [−1.93 2.85] | 0.403 | 0.413 | <0.001 |
| 60 cm | −0.04 ± 1.24 | −0.51 ± 1.67 | 0.47 [−2.06 3.00] | 0.608 | 0.615 | <0.001 | |||
| 70 cm | 0.02 ± 0.84 | −0.61 ± 1.30 | 0.62 [−2.10 3.35] | 0.178 | 0.193 | 0.004 | |||
| 80 cm | 0.47 ± 0.96 | −0.29 ± 1.10 | 0.76 [−1.84 3.36] | 0.147 | 0.174 | 0.005 | |||
| 90 cm | 0.01 ± 1.06 | −0.73 ± 1.03 | 0.75 [−1.95 3.45] | 0.115 | 0.135 | 0.005 | |||
| Right | 50 cm | 0.34 ± 1.35 | −0.95 ± 1.03 | 1.28 * [−0.46 3.03] | 0.471 | 0.727 | 0.007 | ||
| 60 cm | 0.68 ± 1.77 | −0.77 ± 1.18 | 1.45 * [−0.79 3.70] | 0.493 | 0.709 | 0.045 | |||
| 70 cm | 1.32 ± 1.17 | −0.22 ± 0.79 | 1.54 * [−0.33 3.41] | 0.254 | 0.544 | 0.038 | |||
| 80 cm | 0.57 ± 1.21 | −1.04 ± 0.68 | 1.61 * [−0.48 3.69] | 0.182 | 0.414 | 0.072 ** | |||
| 90 cm | 0.65 ± 1.52 | −0.94 ± 1.04 | 1.59* [−1.02 4.20] | 0.282 | 0.478 | 0.110 ** | |||
| 3 m | Left | 50 cm | −0.22 ± 1.16 | −0.80 ± 1.13 | 0.58 [−1.69 2.85] | 0.458 | 0.493 | 0.001 | |
| 60 cm | −0.10 ± 1.09 | −0.44 ± 1.30 | 0.34 [−2.38 3.07] | 0.334 | 0.325 | 0.001 | |||
| 70 cm | −0.55 ± 1.57 | −1.25 ± 1.50 | 0.70 [−2.89 4.29] | 0.275 | 0.284 | 0.017 | |||
| 80 cm | −0.00 ± 1.96 | −0.79 ± 1.91 | 0.79 [−3.02 4.60] | 0.480 | 0.495 | 0.027 | |||
| 90 cm | −0.62 ± 1.51 | −1.07 ± 1.82 | 0.45 [−2.92 3.83] | 0.477 | 0.469 | 0.006 | |||
| Right | 50 cm | −0.49 ± 1.48 | −0.63 ± 1.64 | 0.14 [−2.84 3.11] | 0.550 | 0.526 | 0.001 | ||
| 60 cm | 0.28 ± 1.59 | 0.02 ± 1.85 | 0.26 [−1.71 2.22] | 0.836 | 0.831 | <0.001 | |||
| 70 cm | 0.54 ± 1.34 | 0.04 ± 1.62 | 0.51 [−1.47 2.48] | 0.744 | 0.770 | <0.001 | |||
| 80 cm | 0.25 ± 1.42 | −0.00 ± 2.13 | 0.25 [−2.39 2.89] | 0.736 | 0.723 | <0.001 | |||
| 90 cm | 0.04 ± 1.32 | −0.57 ± 1.33 | 0.61 [−1.13 2.35] | 0.717 | 0.777 | <0.001 | |||
| Step length (cm) | 2 m | Left | 50 cm | 49.19 ± 1.38 | 50.32 ± 1.46 | −1.13 * [−3.05 0.80] | 0.590 | 0.761 | 0.005 |
| 60 cm | 59.32 ± 1.41 | 60.46 ± 1.50 | −1.14 * [−3.36 1.08] | 0.546 | 0.696 | 0.010 | |||
| 70 cm | 69.09 ± 0.94 | 70.20 ± 1.27 | −1.12 * [−3.18 0.95] | 0.380 | 0.554 | 0.006 | |||
| 80 cm | 79.45 ± 1.09 | 80.13 ± 1.40 | −0.68 [−3.04 1.67] | 0.492 | 0.542 | 0.002 | |||
| 90 cm | 90.06 ± 0.98 | 91.25 ± 1.38 | −1.19 * [−3.95 1.58] | 0.213 | 0.304 | 0.030 | |||
| Right | 50 cm | 49.02 ± 1.73 | 51.33 ± 1.37 | −2.31 * [−3.59 −1.03] | 0.439 | 0.913 | 0.773 ** | ||
| 60 cm | 58.73 ± 1.44 | 61.05 ± 1.30 | −2.32 * [−3.77 −0.87] | 0.353 | 0.854 | 0.762 ** | |||
| 70 cm | 67.50 ± 1.66 | 69.98 ± 1.39 | −2.49 * [−4.64 −0.33] | 0.325 | 0.744 | 0.825 ** | |||
| 80 cm | 79.52 ± 1.03 | 81.17 ± 1.25 | −1.65 * [−2.97 −0.32] | 0.411 | 0.827 | 0.022 | |||
| 90 cm | 89.49 ± 1.61 | 91.24 ± 1.72 | −1.75 * [−3.41 −0.10] | 0.566 | 0.871 | 0.089 ** | |||
| 3 m | Left | 50 cm | 50.66 ± 1.35 | 50.73 ± 1.16 | −0.06 [−1.92 1.80] | 0.737 | 0.717 | <0.001 | |
| 60 cm | 60.18 ± 1.50 | 60.28 ± 1.38 | −0.10 [−2.69 2.49] | 0.605 | 0.581 | <0.001 | |||
| 70 cm | 69.92 ± 1.91 | 70.78 ± 1.82 | −0.85 [−5.72 4.02] | 0.110 | 0.112 | 0.067 ** | |||
| 80 cm | 78.81 ± 2.14 | 80.02 ± 1.78 | −1.21 [−5.81 3.38] | 0.258 | 0.289 | 0.120 ** | |||
| 90 cm | 89.64 ± 1.99 | 90.74 ± 1.78 | −1.11 [−5.60 3.38] | 0.242 | 0.266 | 0.093 ** | |||
| Right | 50 cm | 50.79 ± 2.00 | 50.41 ± 2.10 | 0.39 [−2.77 3.55] | 0.699 | 0.690 | 0.004 | ||
| 60 cm | 59.53 ± 1.97 | 59.65 ± 2.15 | −0.12 [−2.60 2.36] | 0.826 | 0.812 | <0.001 | |||
| 70 cm | 69.60 ± 1.22 | 69.59 ± 1.54 | 0.01 [−2.61 2.62] | 0.568 | 0.542 | <0.001 | |||
| 80 cm | 79.44 ± 1.43 | 79.43 ± 2.29 | 0.00 [−3.52 3.53] | 0.582 | 0.556 | 0.002 | |||
| 90 cm | 89.69 ± 1.32 | 89.63 ± 1.78 | 0.06 [−2.72 2.84] | 0.615 | 0.590 | <0.001 | |||
| Stepping accuracy (cm) | 2 m | Left | 1.33 ± 0.29 | 1.28 ± 0.33 | 0.05 [−0.24 0.33] | 0.892 | 0.892 | <0.001 | |
| Right | 1.30 ± 0.30 | 1.21 ± 0.26 | 0.08 [−0.18 0.35] | 0.855 | 0.884 | <0.001 | |||
| 3 m | Left | 1.52 ± 0.54 | 1.57 ± 0.61 | −0.05 [−0.51 0.41] | 0.922 | 0.917 | <0.001 | ||
| Right | 1.43 ± 0.47 | 1.48 ± 0.54 | −0.05 [−0.78 0.68] | 0.745 | 0.729 | <0.001 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geerse, D.; Coolen, B.; Kolijn, D.; Roerdink, M. Validation of Foot Placement Locations from Ankle Data of a Kinect v2 Sensor. Sensors 2017, 17, 2301. https://doi.org/10.3390/s17102301
Geerse D, Coolen B, Kolijn D, Roerdink M. Validation of Foot Placement Locations from Ankle Data of a Kinect v2 Sensor. Sensors. 2017; 17(10):2301. https://doi.org/10.3390/s17102301
Chicago/Turabian StyleGeerse, Daphne, Bert Coolen, Detmar Kolijn, and Melvyn Roerdink. 2017. "Validation of Foot Placement Locations from Ankle Data of a Kinect v2 Sensor" Sensors 17, no. 10: 2301. https://doi.org/10.3390/s17102301
APA StyleGeerse, D., Coolen, B., Kolijn, D., & Roerdink, M. (2017). Validation of Foot Placement Locations from Ankle Data of a Kinect v2 Sensor. Sensors, 17(10), 2301. https://doi.org/10.3390/s17102301