
An Indoor Pedestrian Positioning Method Using HMM with a Fuzzy Pattern Recognition Algorithm in a WLAN Fingerprint System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
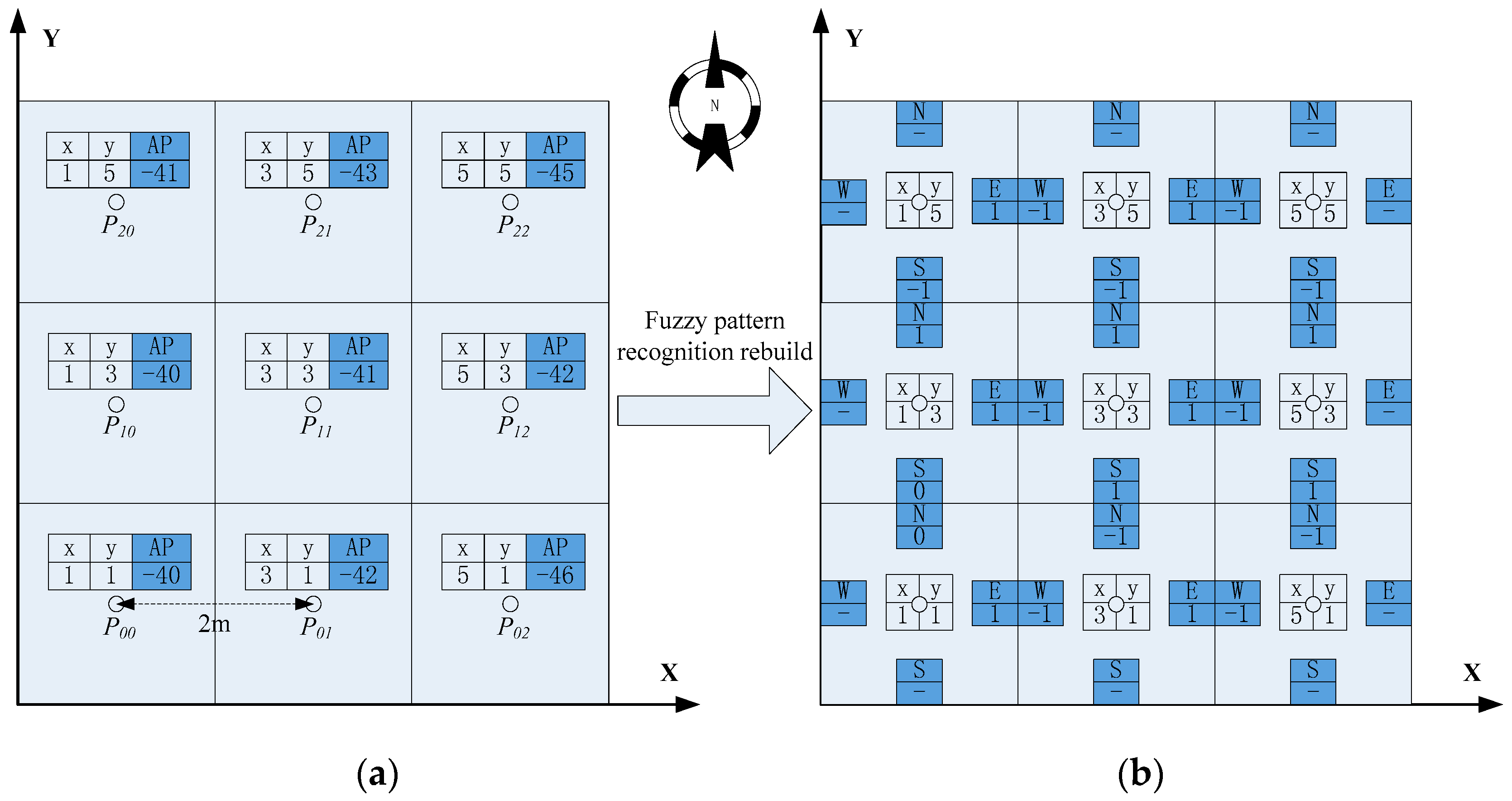
3. Fuzzy Pattern Recognition Algorithm
- (1)
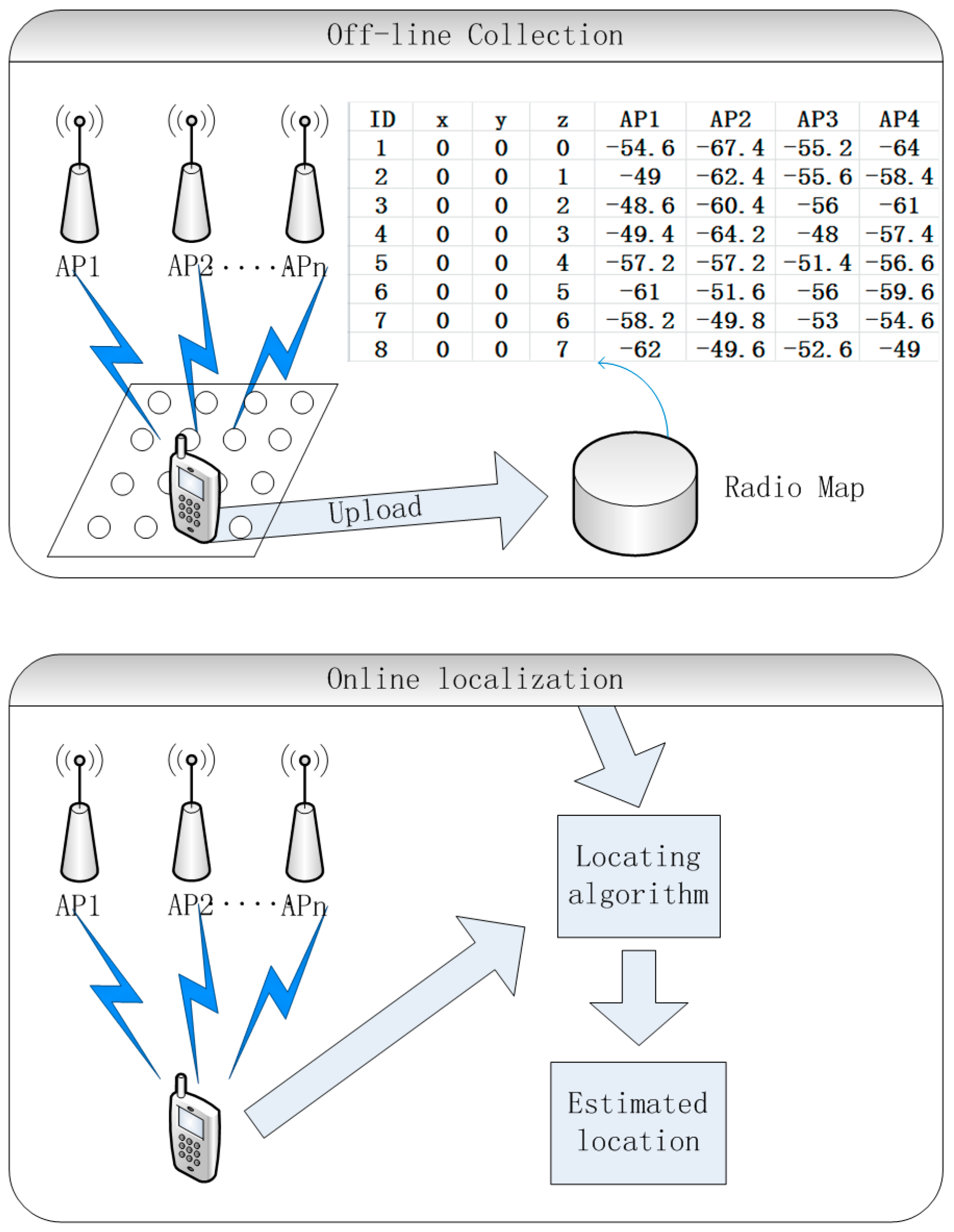
- Given an initial RP in the grid area established via static positioning or user feedback, the RSSI vectors and the position coordinates of are respectively and .
- (2)
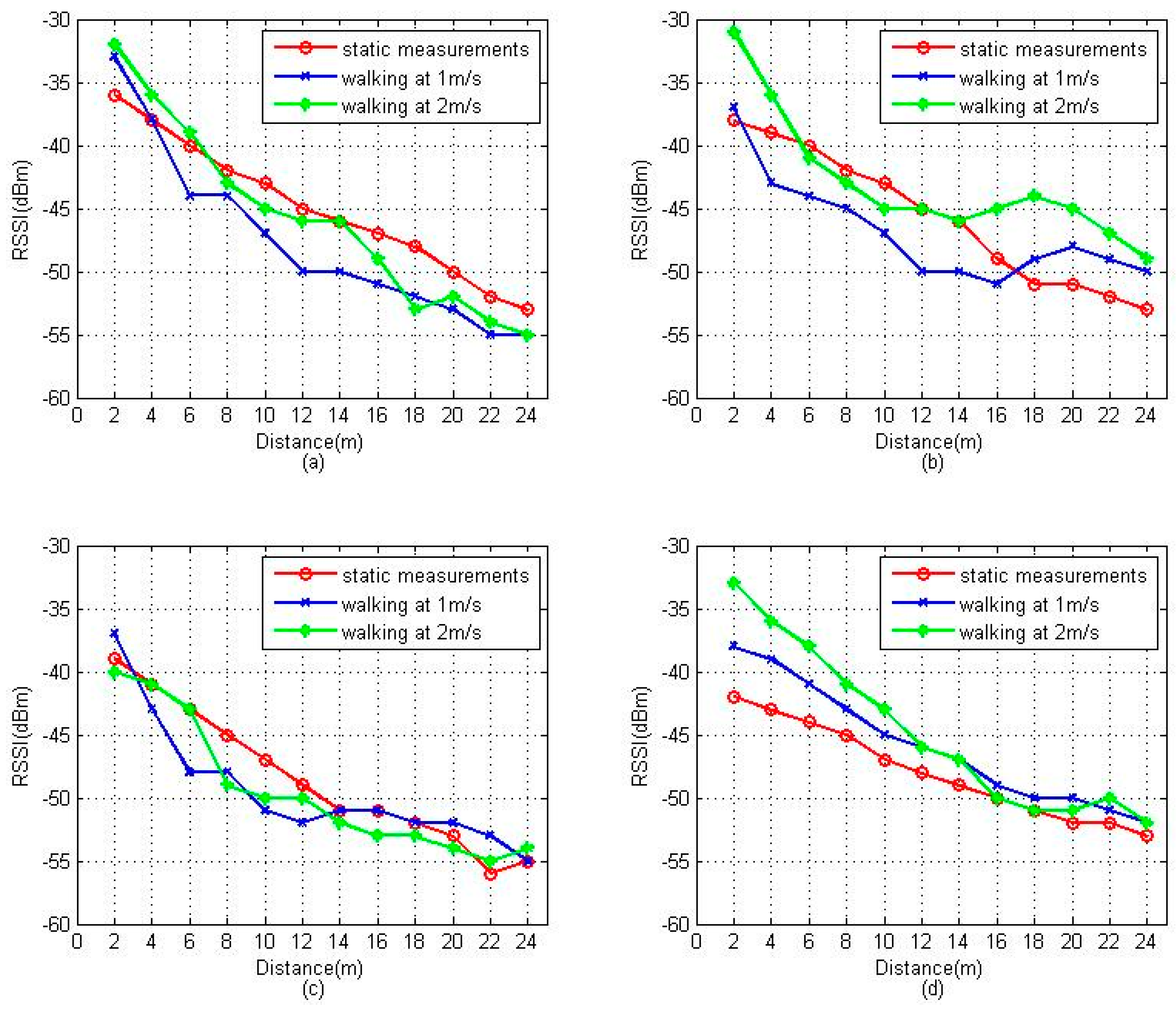
- Measure RSSI vectors during pedestrian walking per second, and compare each AP’s RSSI of with . Considering the signal random disturbance, we give a dB m threshold to compensate for the influence of RSSI fluctuation. is the comparison result. The pseudo-code of this procedure is shown as follows:there are:st = (rss1t, rss2t,…rssnt);st – 1=(rss1(t–1),rss1(t–1),…rss1(t–1));for(j = 1; j ≤ n; j++){if ( > )oj = 1else if ( < )oj = −1Elseoj = 0}
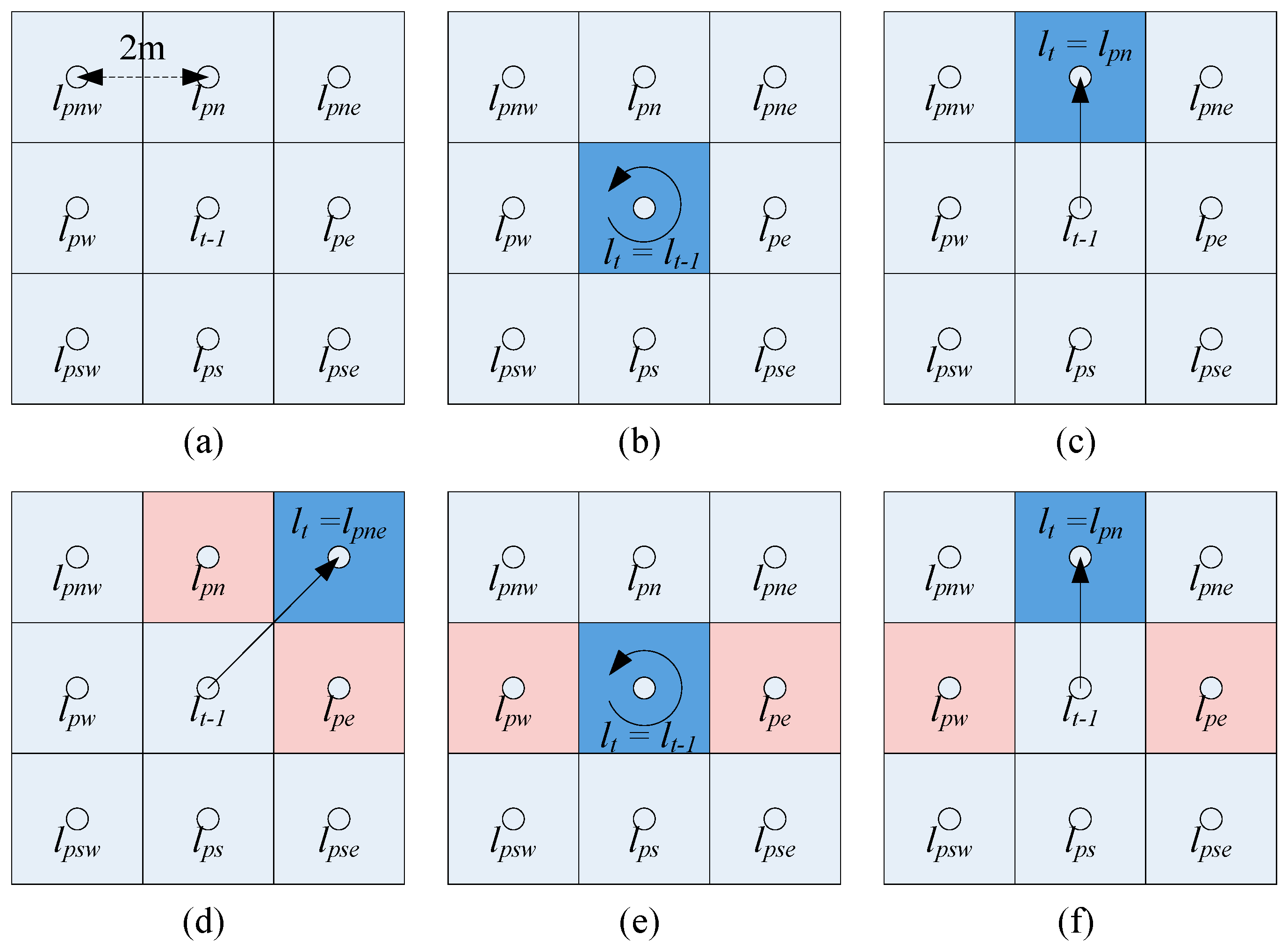
- (3)
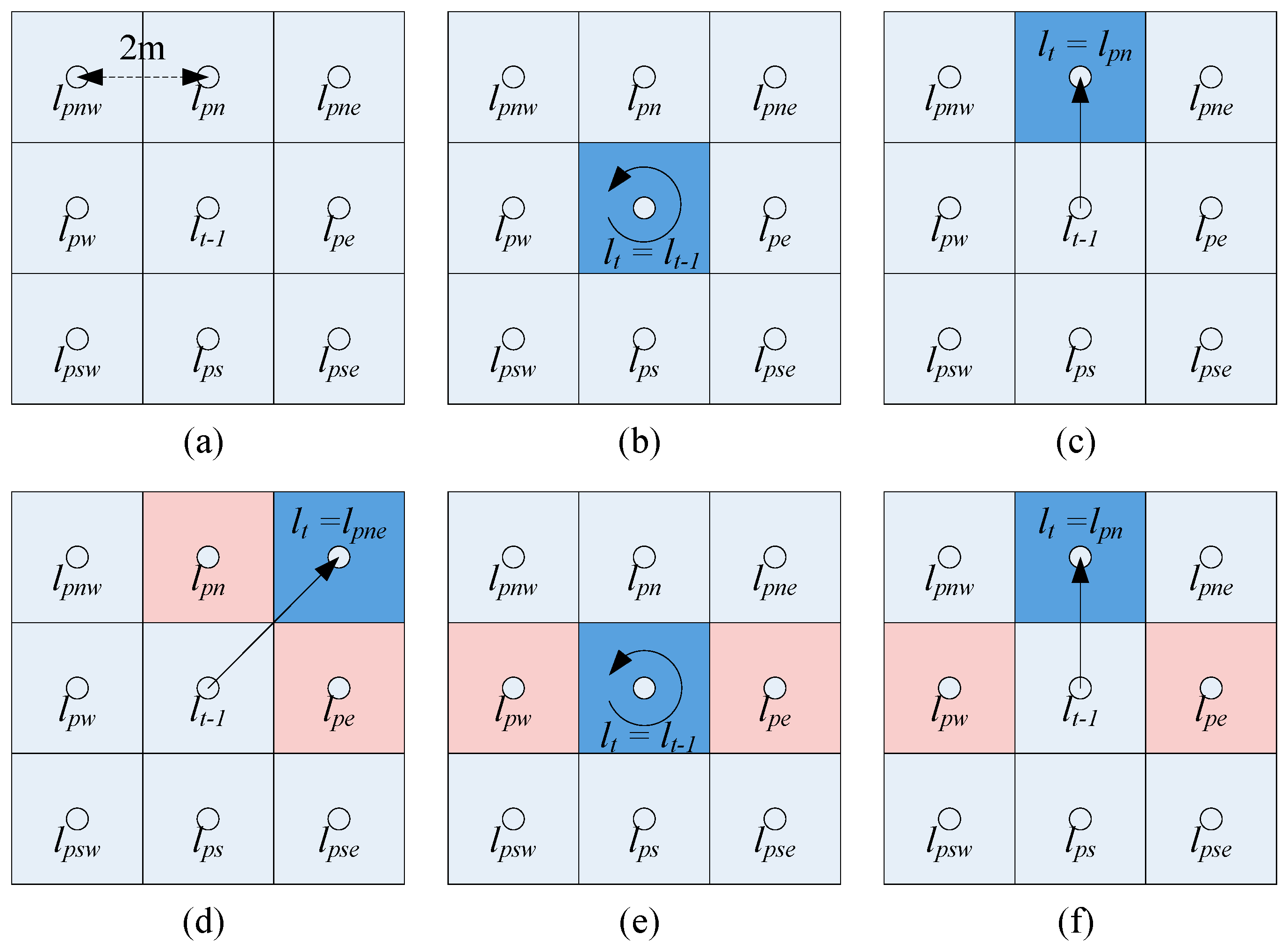
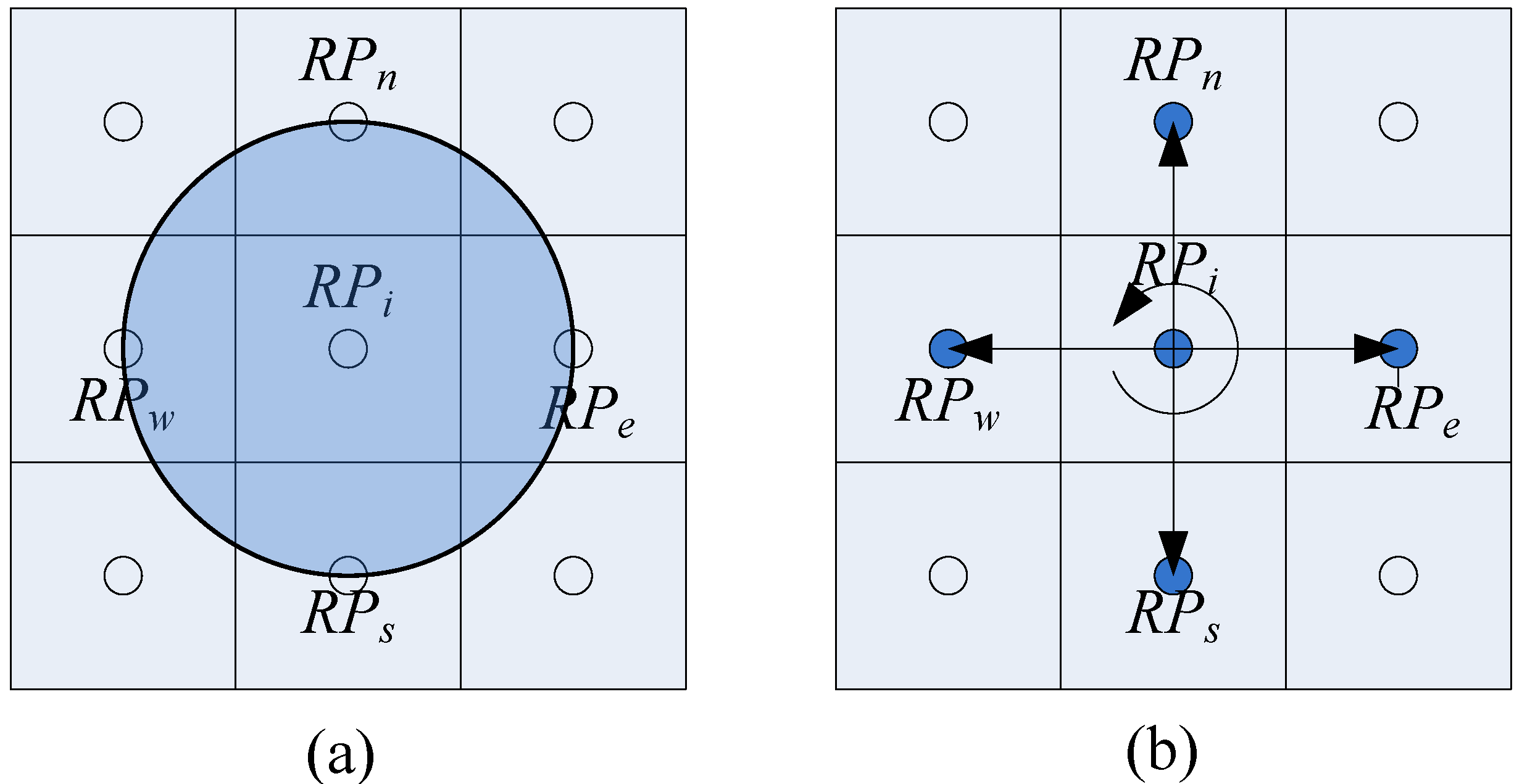
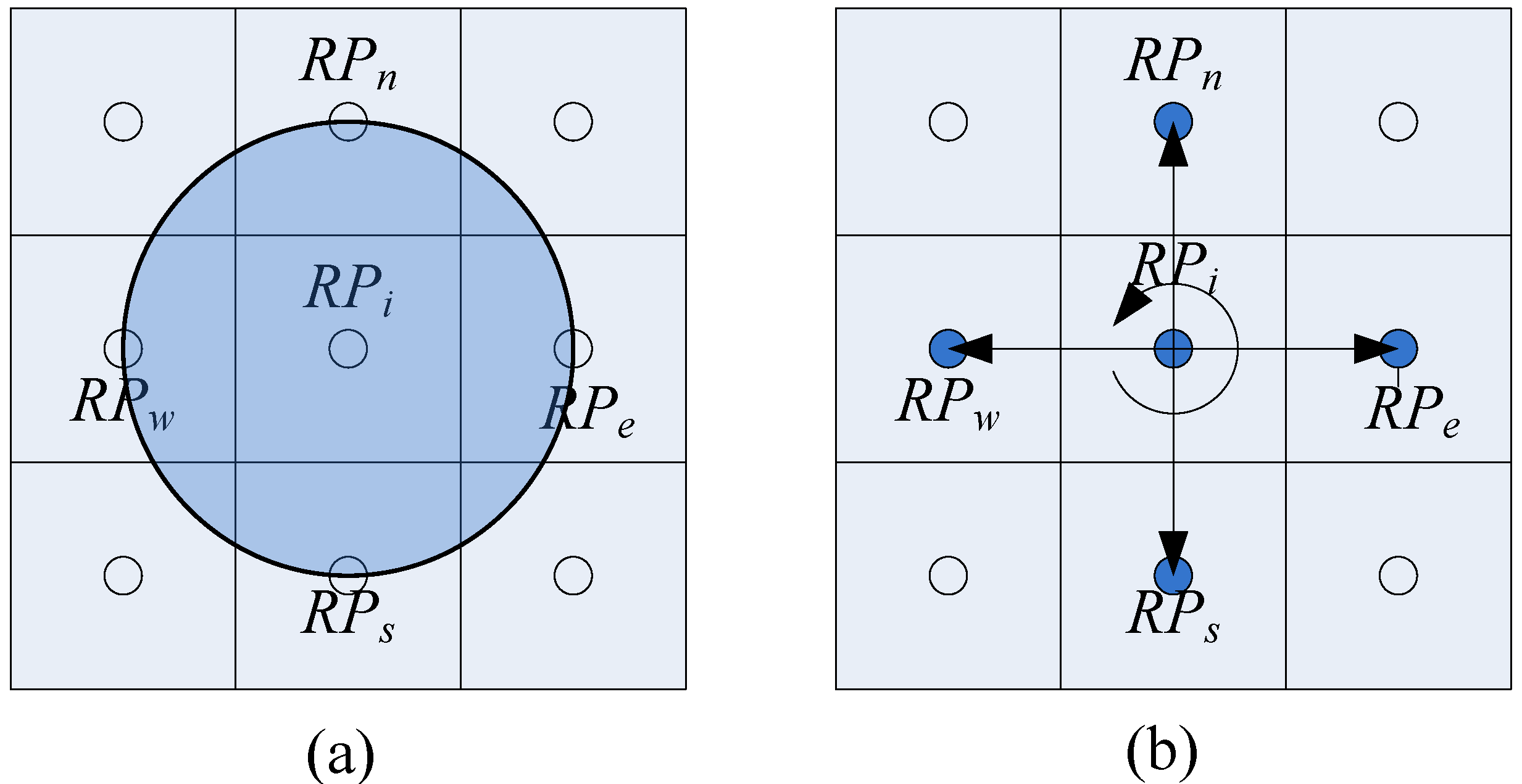
- Compare each AP’s RSSI of with the adjacent RPs in four directions, namely , , and . The position coordinates of the four RPs are , , . By employing the above method, the comparison results are .
- (4)
- For estimating the position of the pedestrian, we need to separately compare the RSSI variation trend by performing a bitwise logical XOR operation between and . The results can determine the relative distance from the pedestrian to the four RPs, which can be used to deduce the approximate position of the pedestrian. The pseudo-code of this procedure is shown as follows:there are:,, , ;, ;;;;;= ;;;;;;if ();else if ();else if (){if are adjacent );else;}else if ();
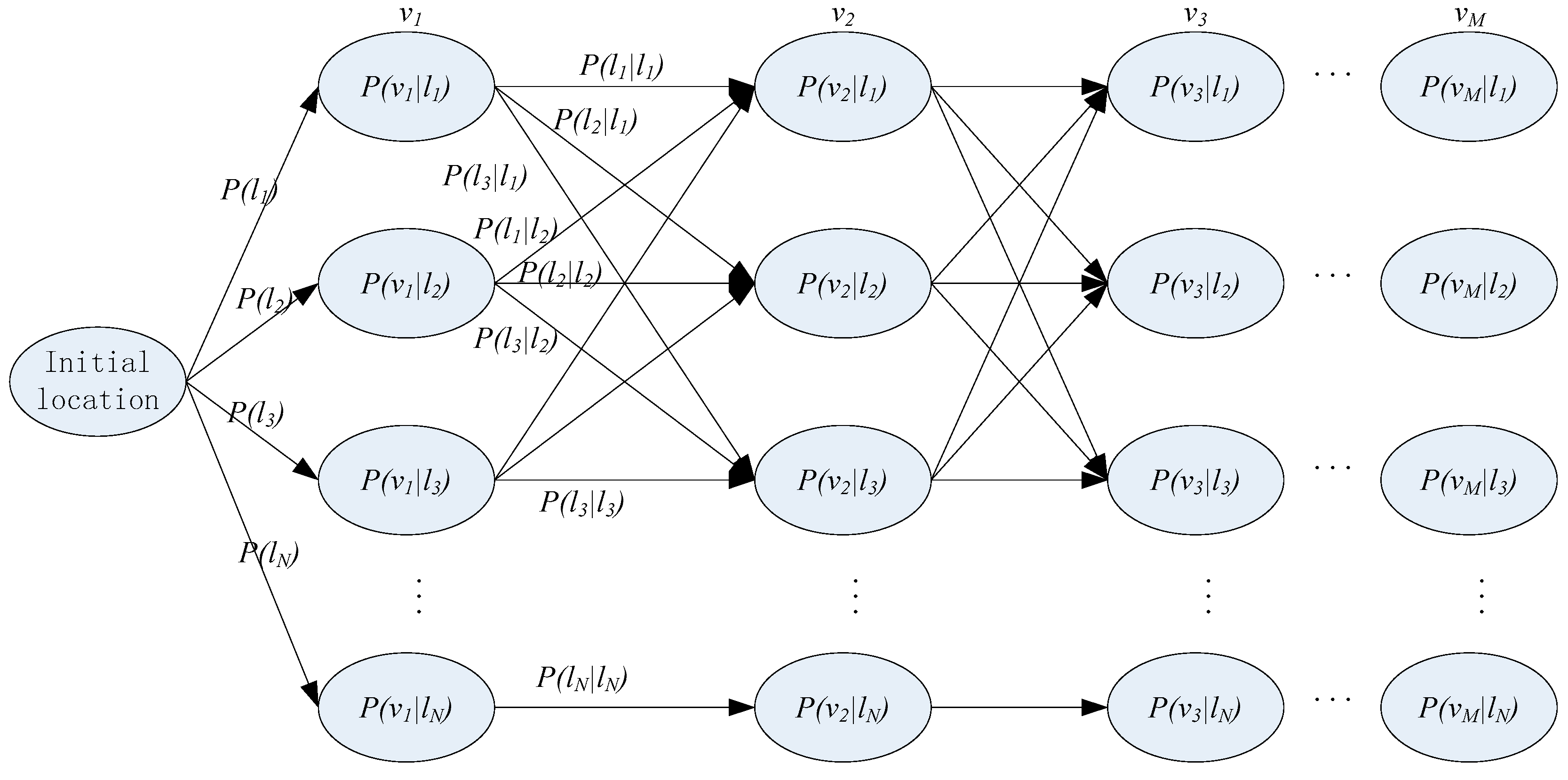
4. Pedestrian Positioning Method Based on HMM
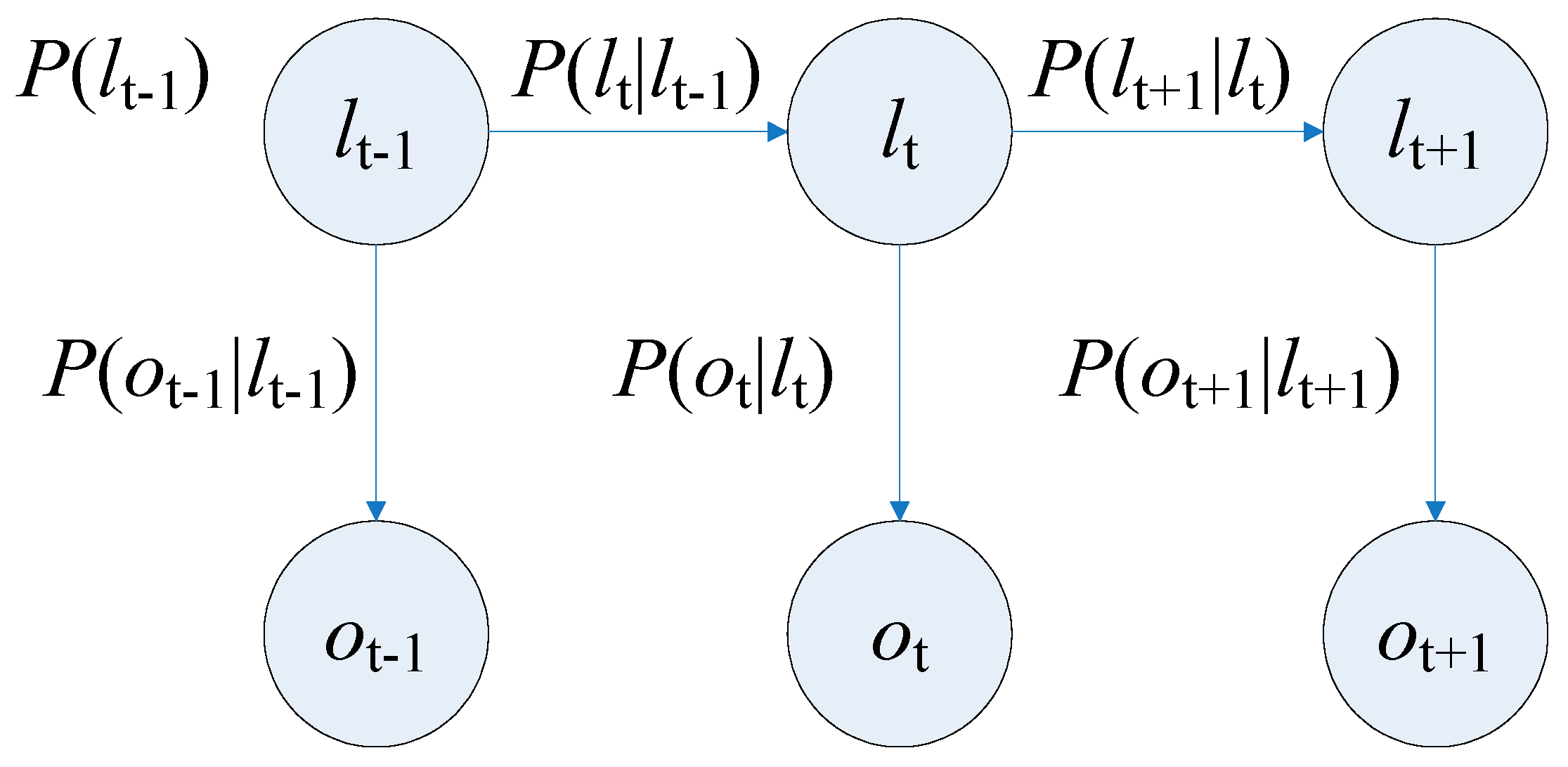
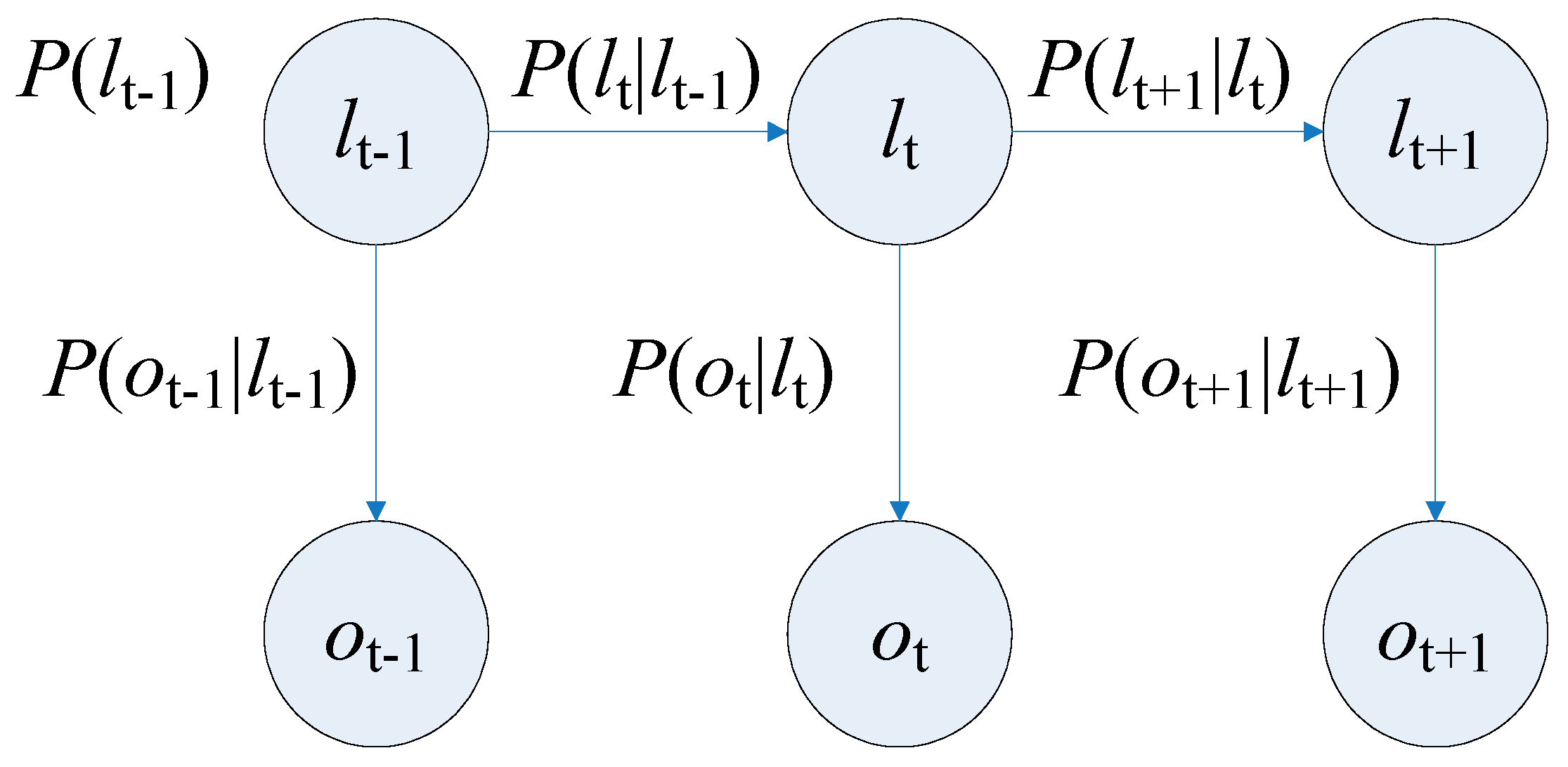
4.1. Mathematical Model of Pedestrian Positioning
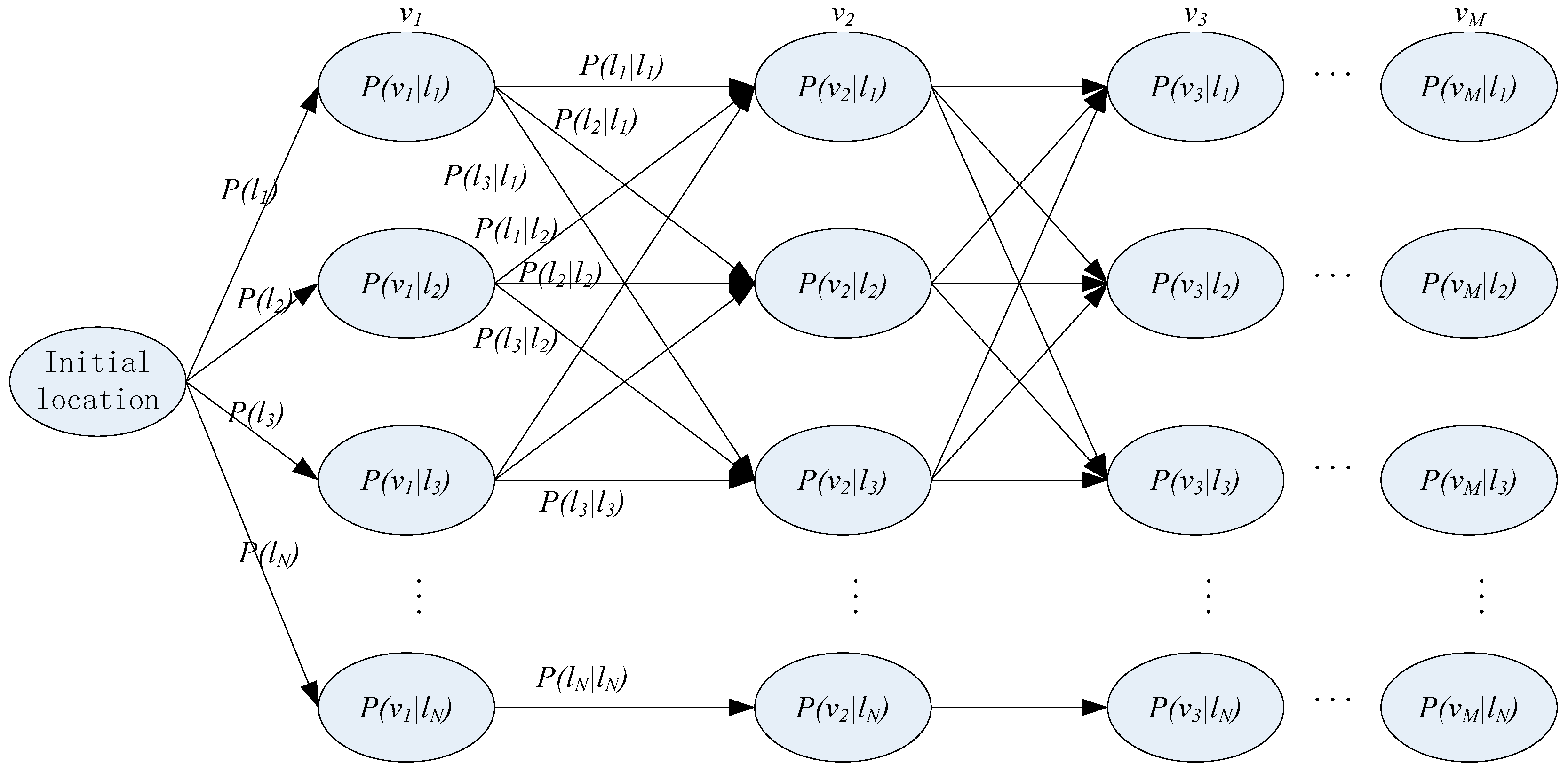
4.2. Pedestrian Positioning Using Viterbi Algorithm
4.3. Employing the FPR Algorithm to Estimate the Transition Probability
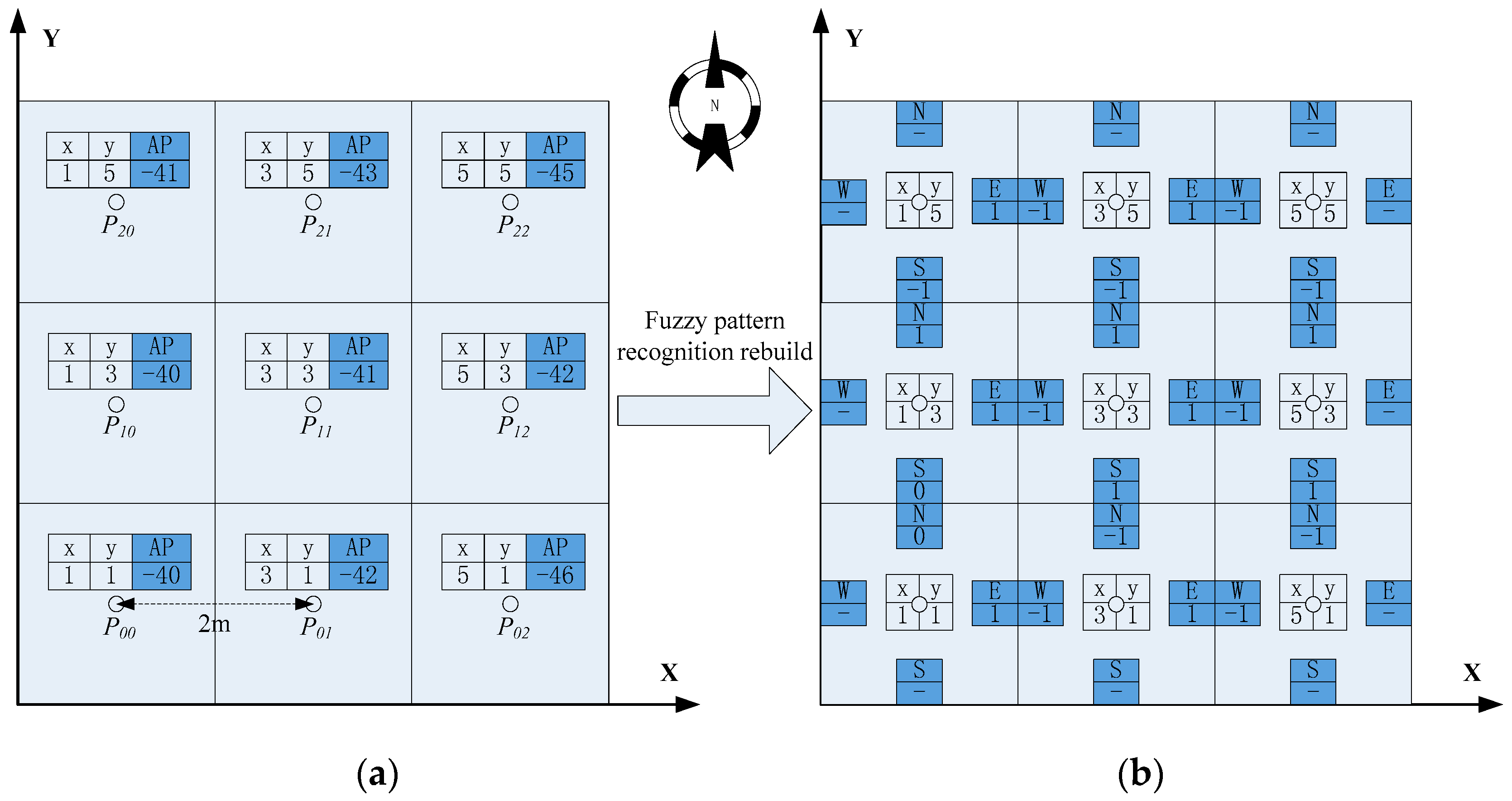
- (1)
- Compare the and using the FPR arithmetic step two. The is the comparison result.
- (2)
- The are comparison results from to adjacent RPs in the four directions. Because the radio map has been rebuilt, the are already known. We can directly perform comparison operations between and just as the FPR arithmetic steps 3 and 4.
- (3)
- According to the comparison results between and , we can estimate the transition probability using a proportion method. To simplify the calculation we consider that the transition probability is in direct proportion to the logical XNOR operation result between and . No matter whether the RSSI is stronger or weaker, the more identical they are, the higher the transition probability is. The pseudo-code of this procedure is shown as follows:there are:, , , , , , , , , , , , ;, , , , are adjacent RPs to on four direction;;;;;;;;;;;
- (4)
- If there are multiple training trajectories from other directions, we use the above steps to estimate the transition probability from other directions, and the final results are the arithmetic means of the transition probability from different directions. In this way, we use the FPR algorithm to estimate the transition probability, which provides strong support for the pedestrian positioning with the Viterbi algorithm.
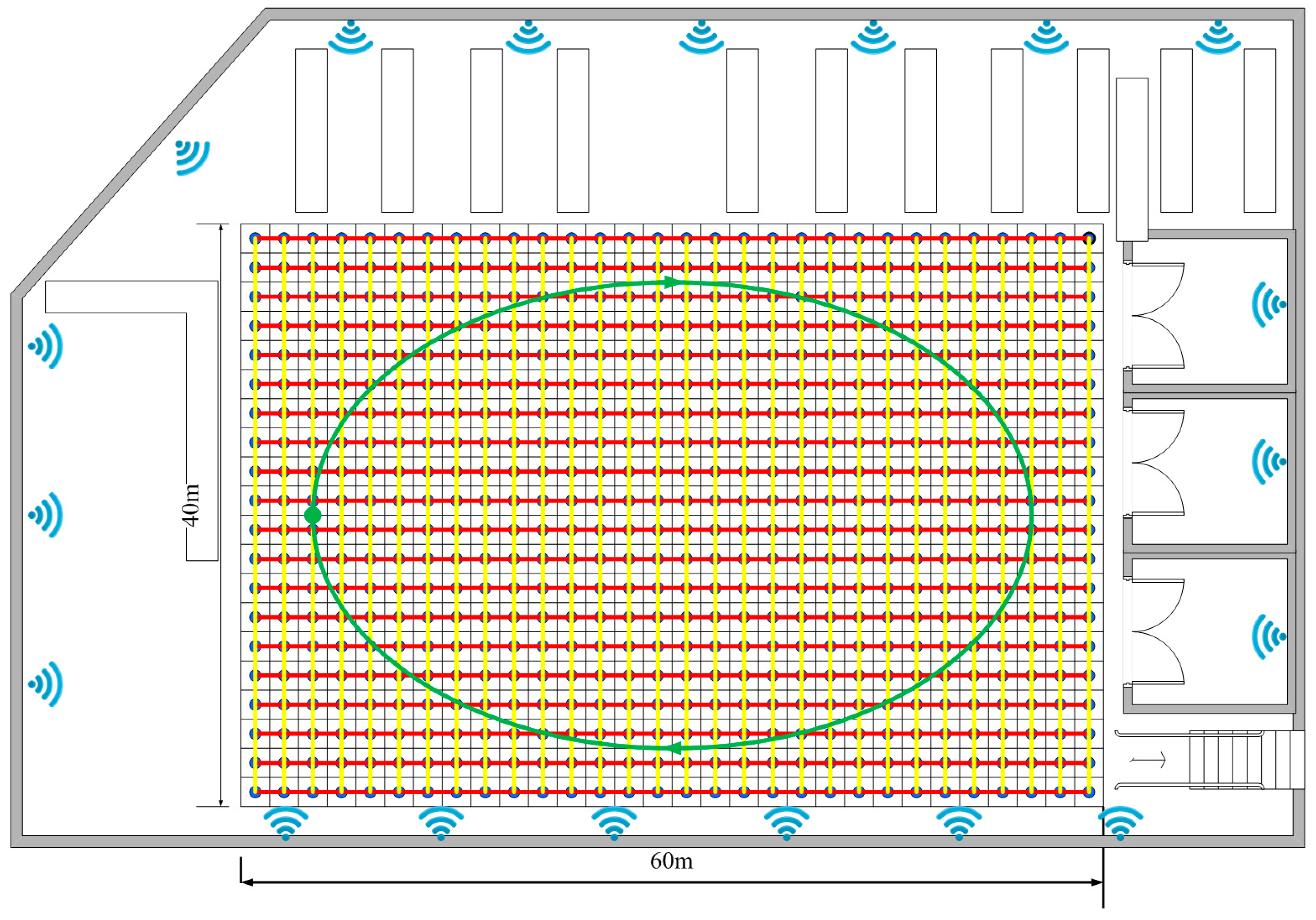
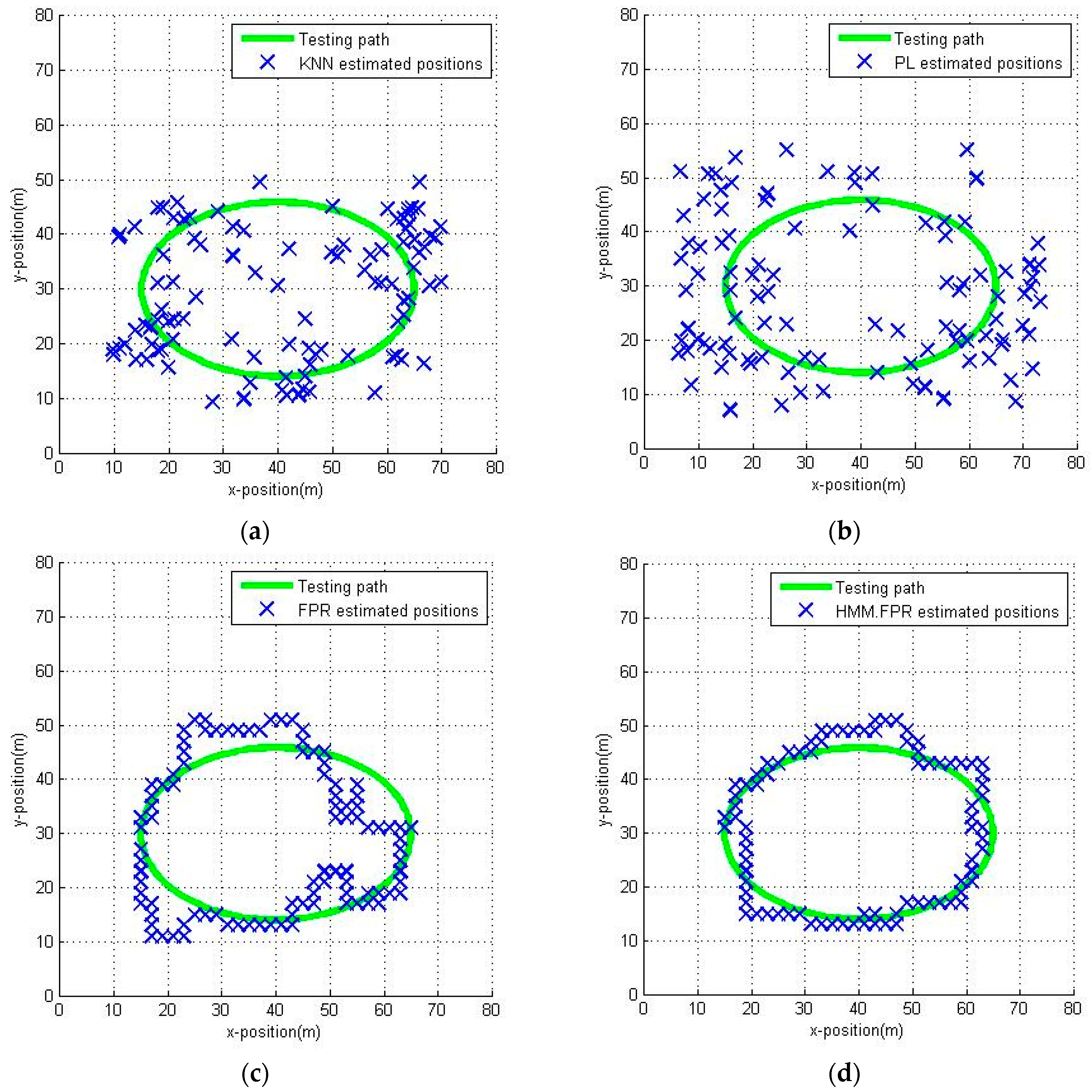
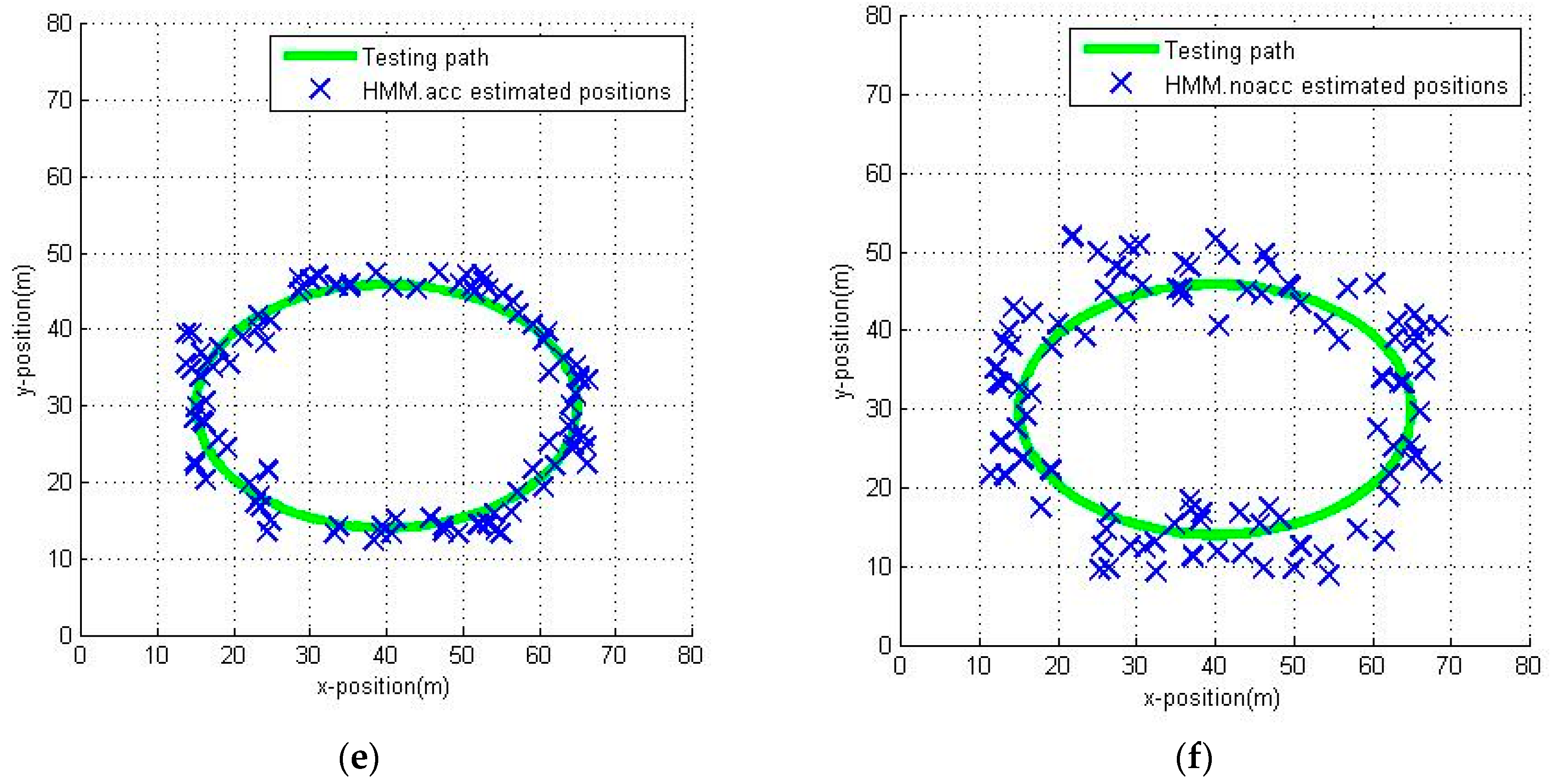
5. Positioning Experiments and Results
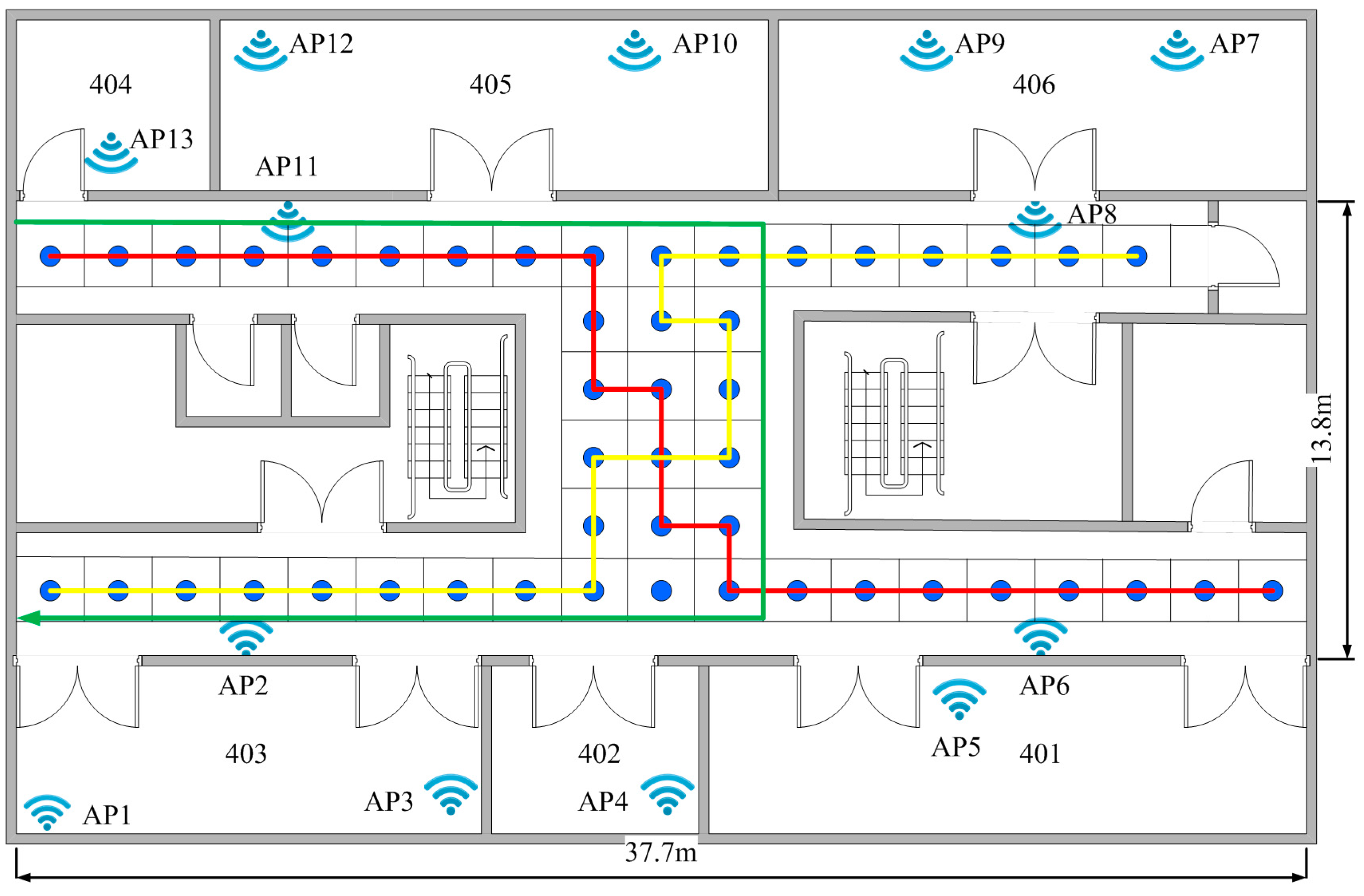
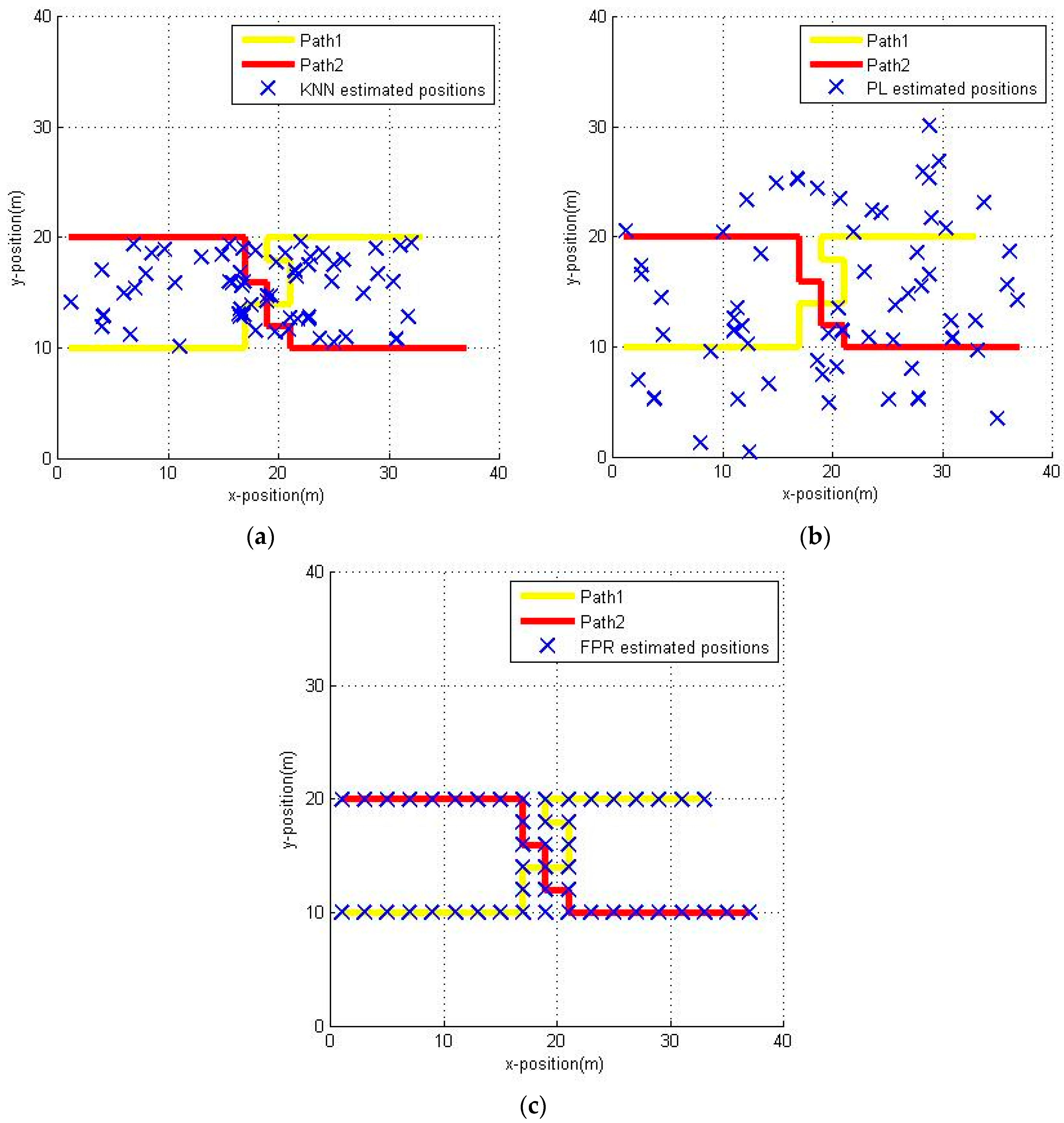
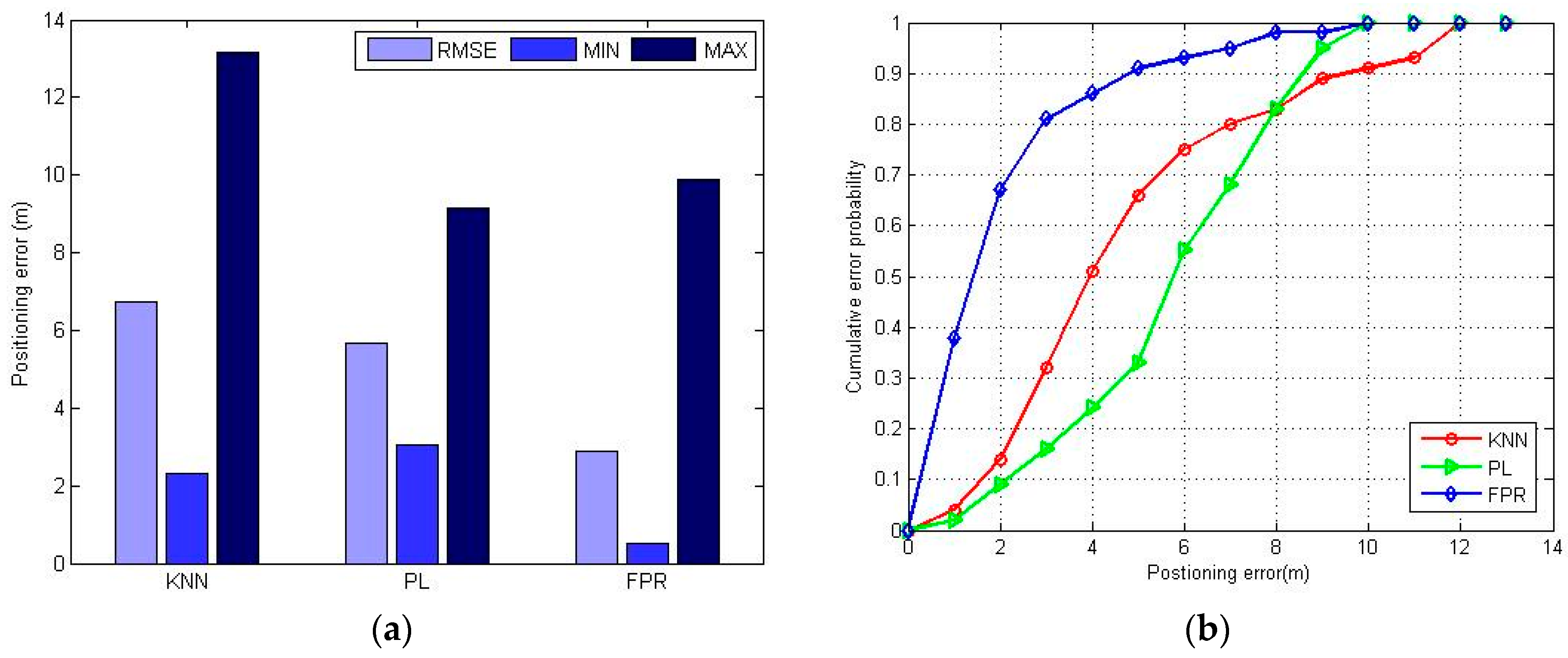
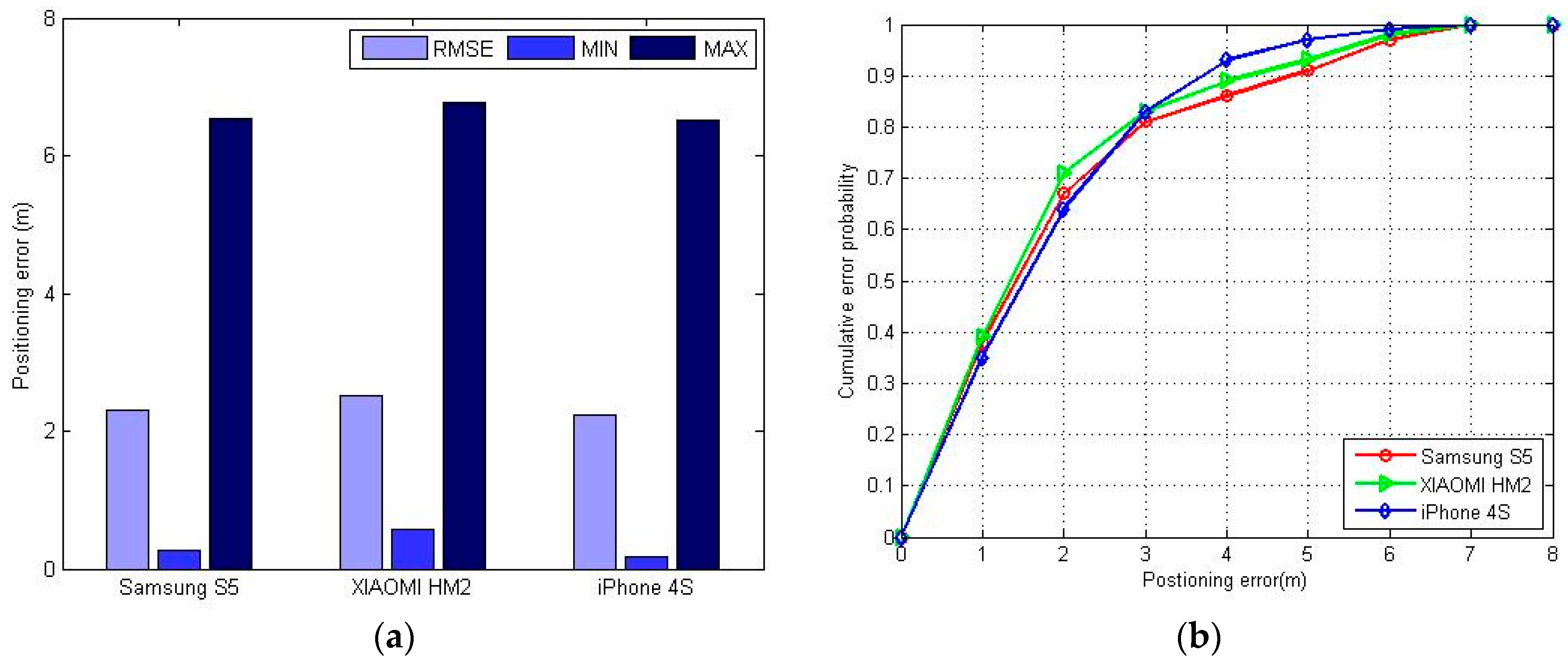
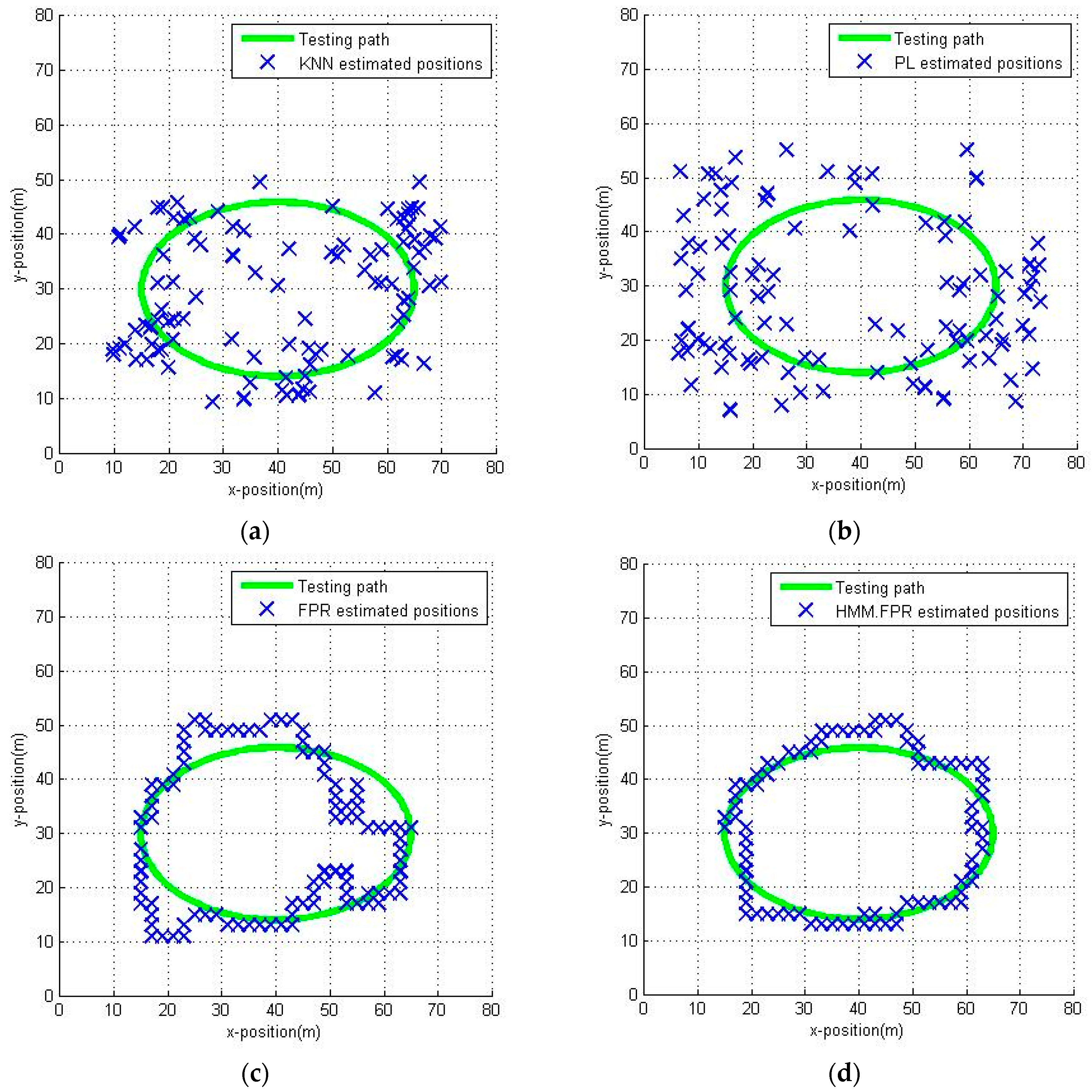
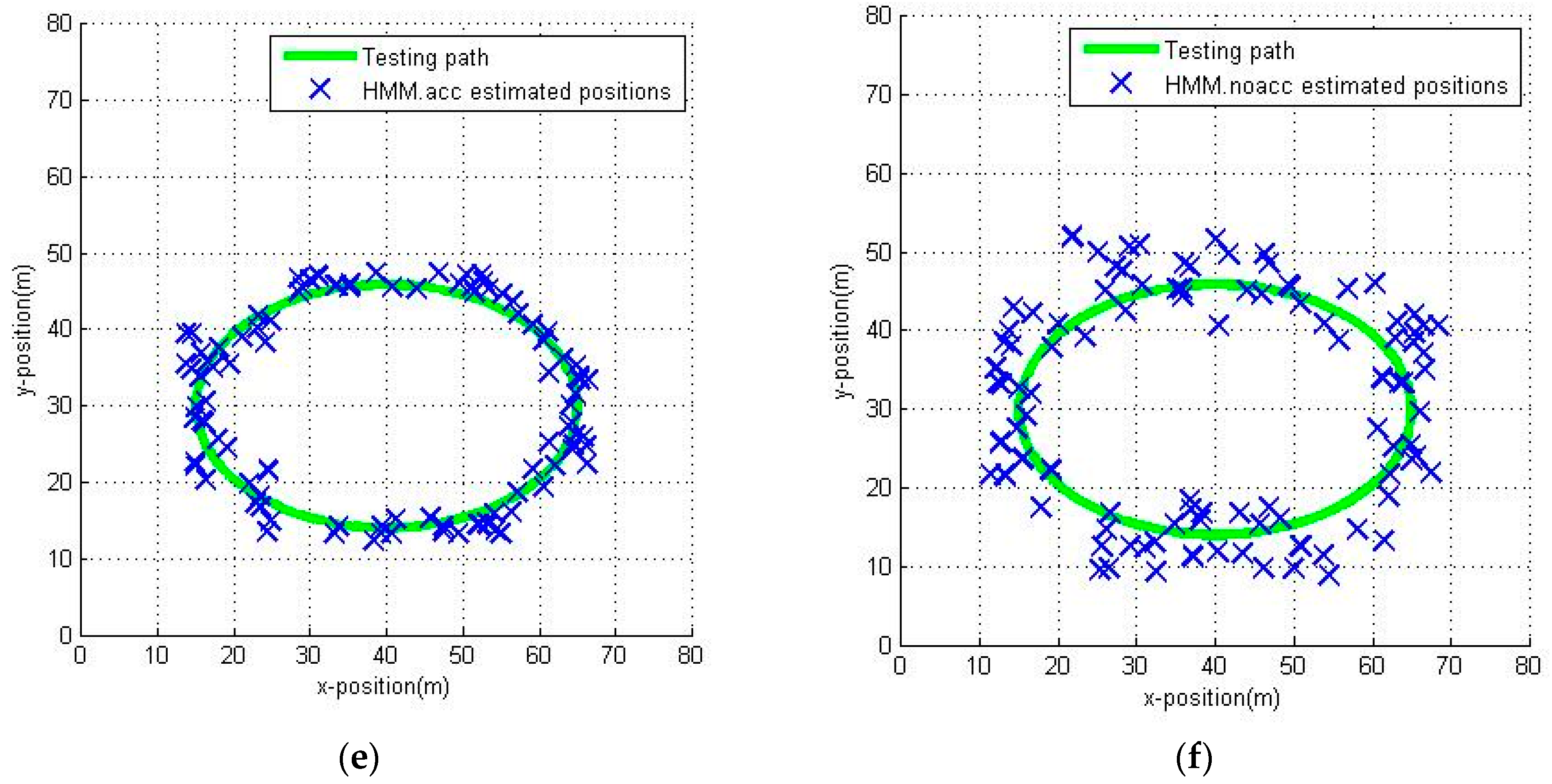
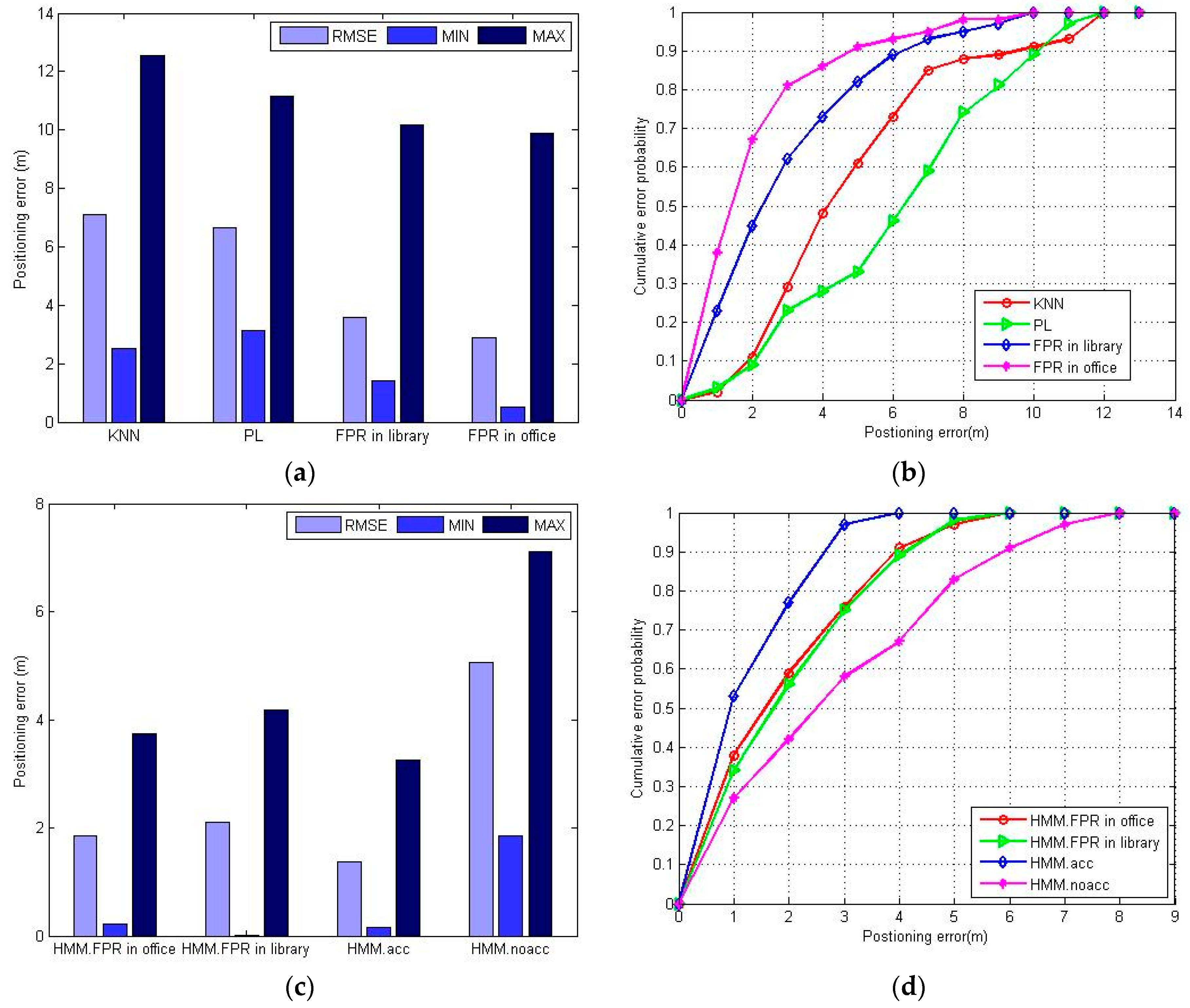
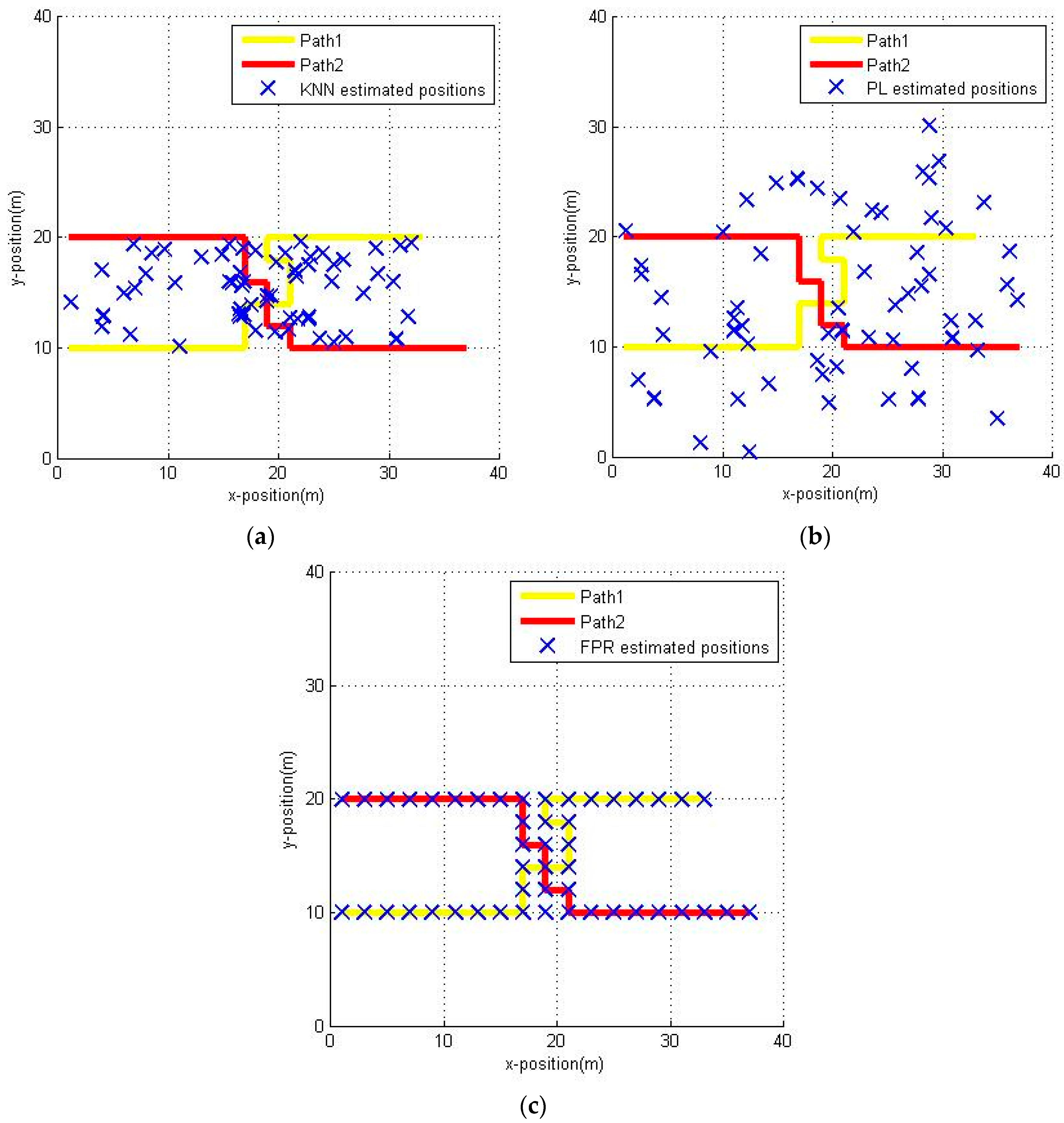
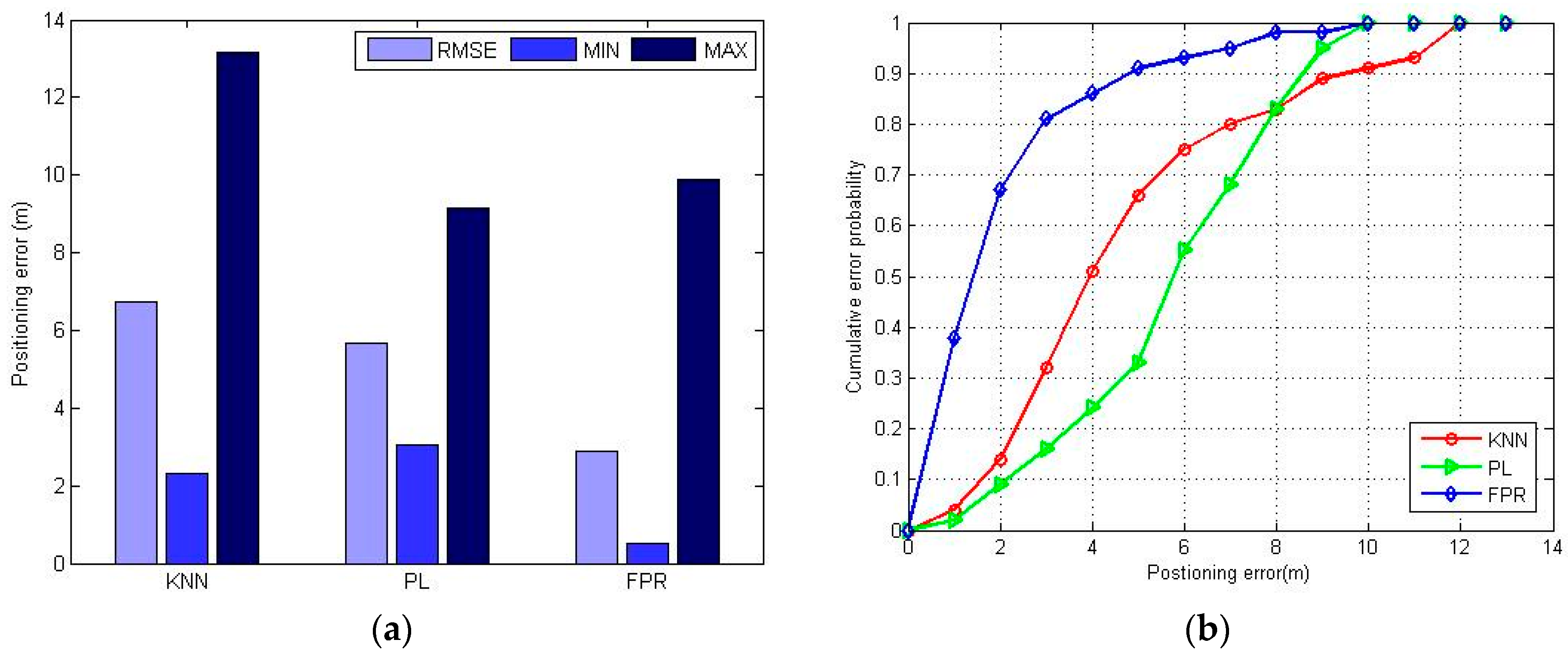
5.1. Performance Evaluation in an Office Building
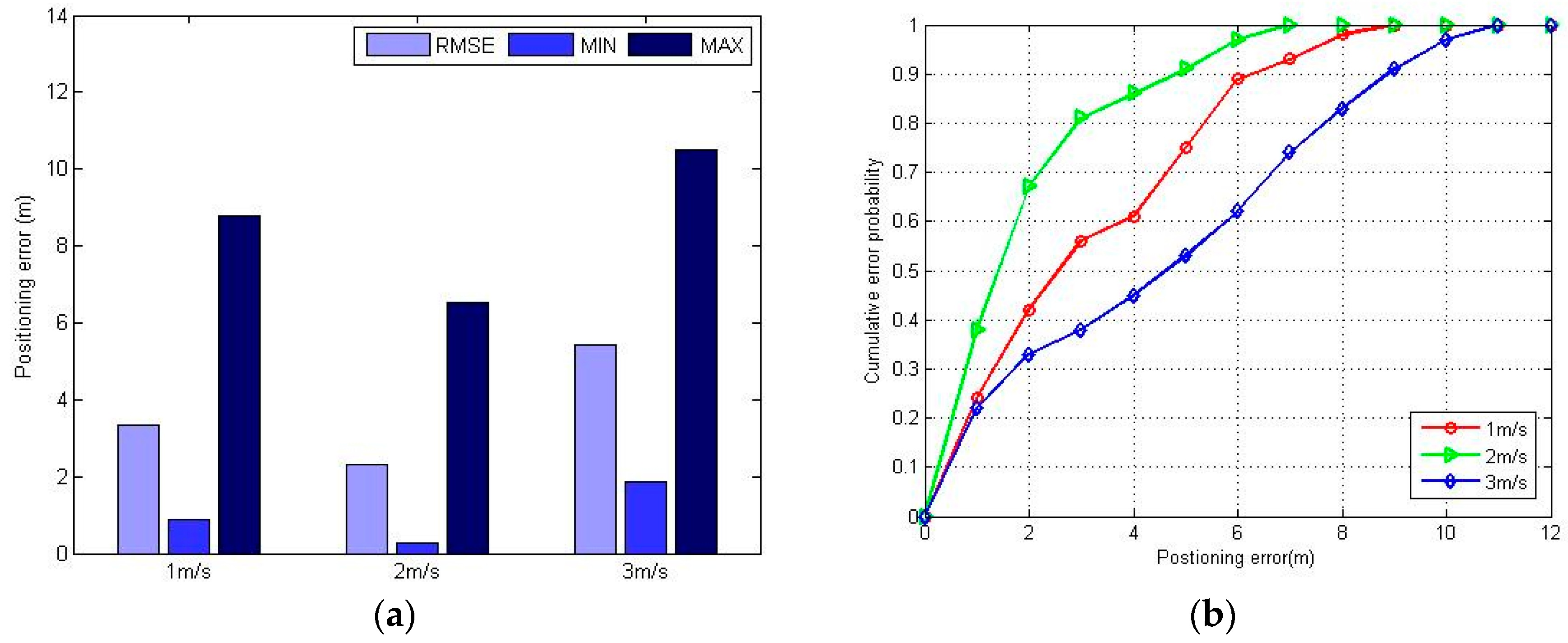
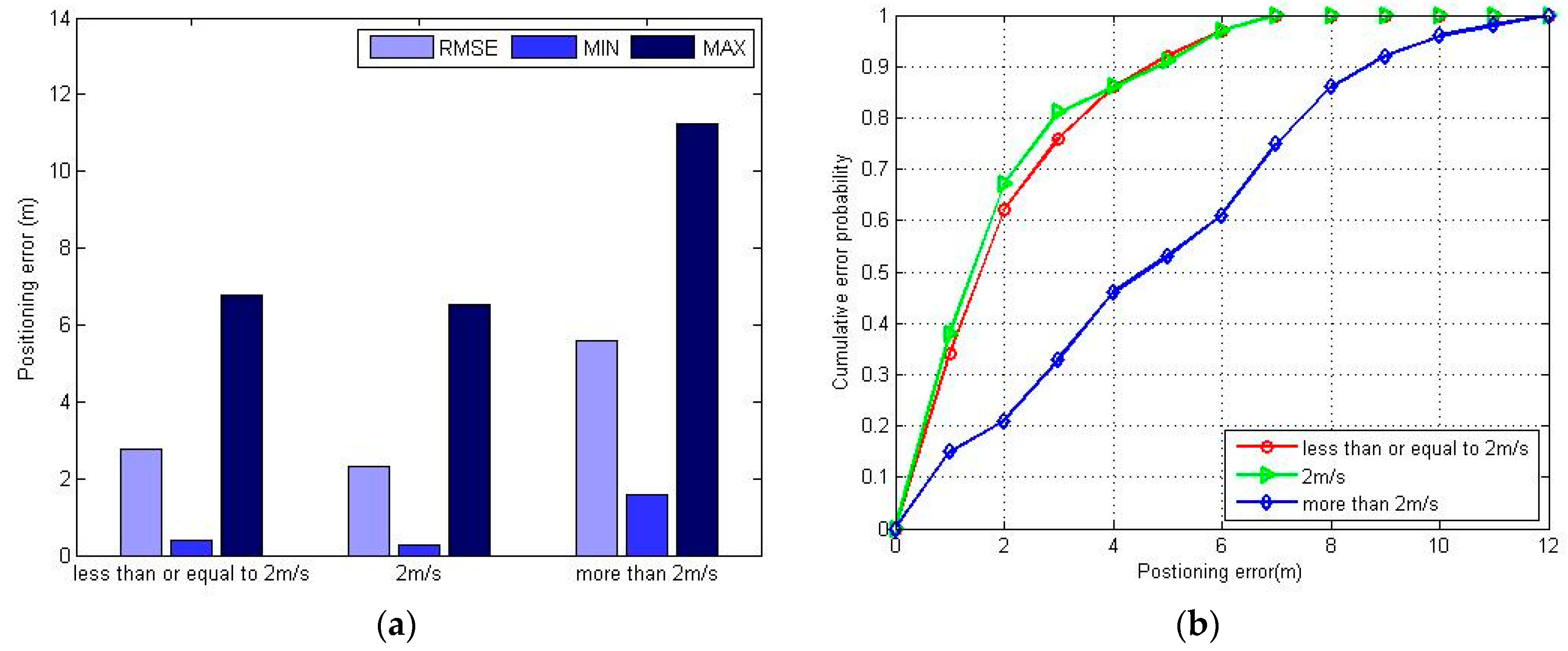
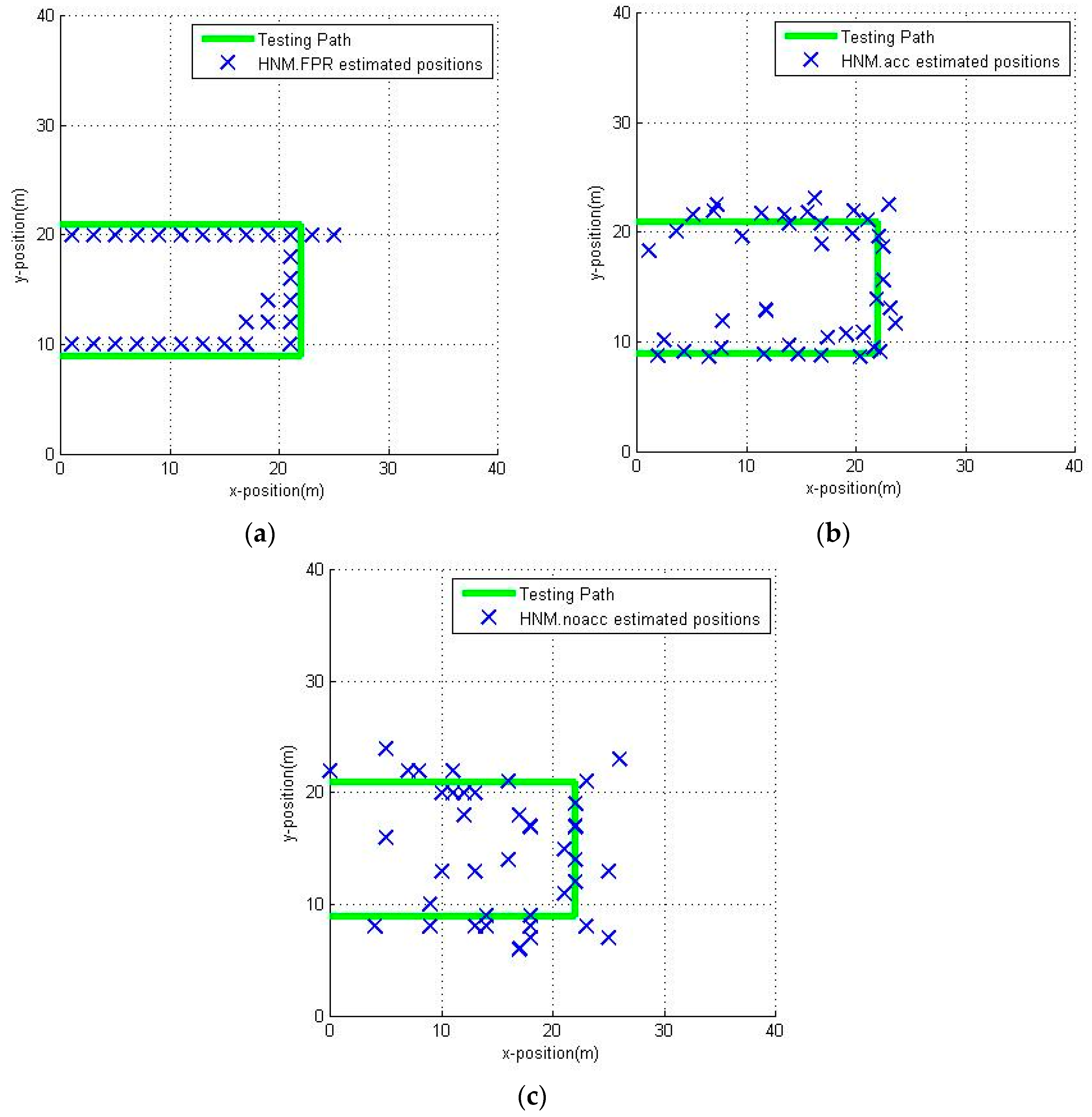
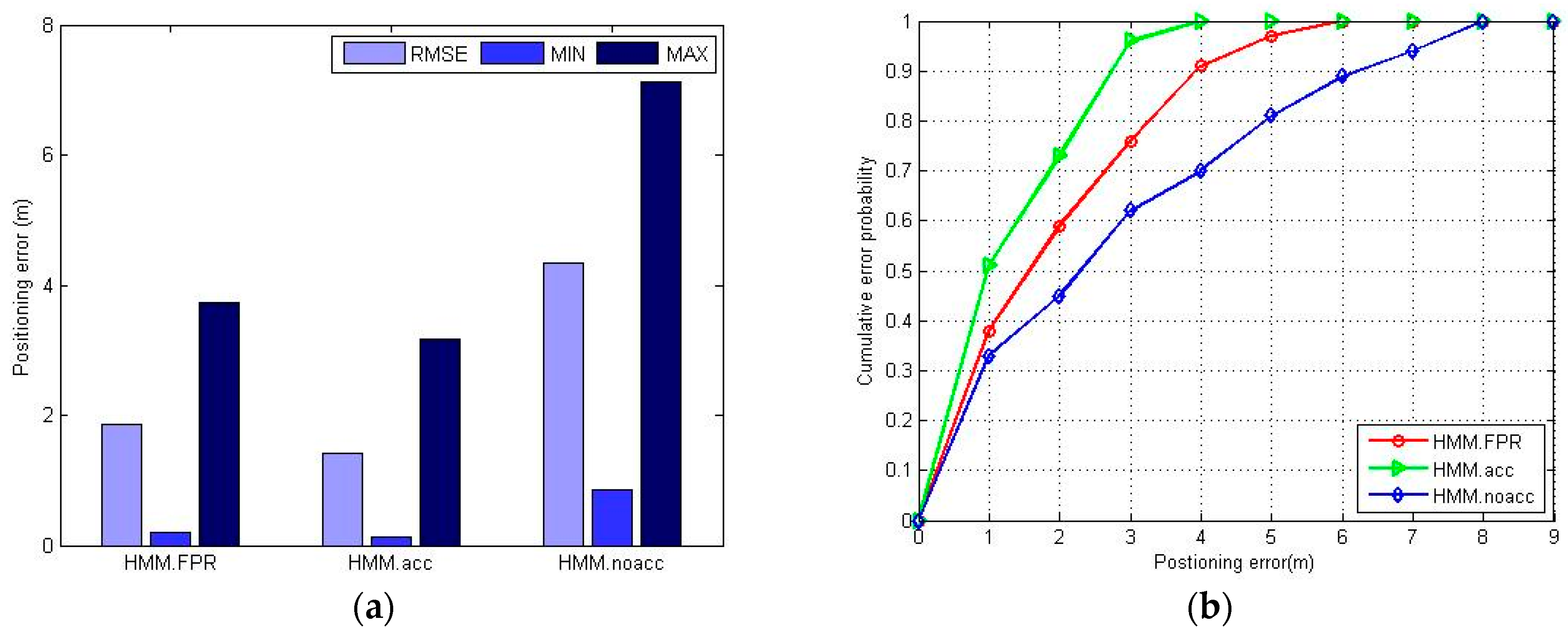
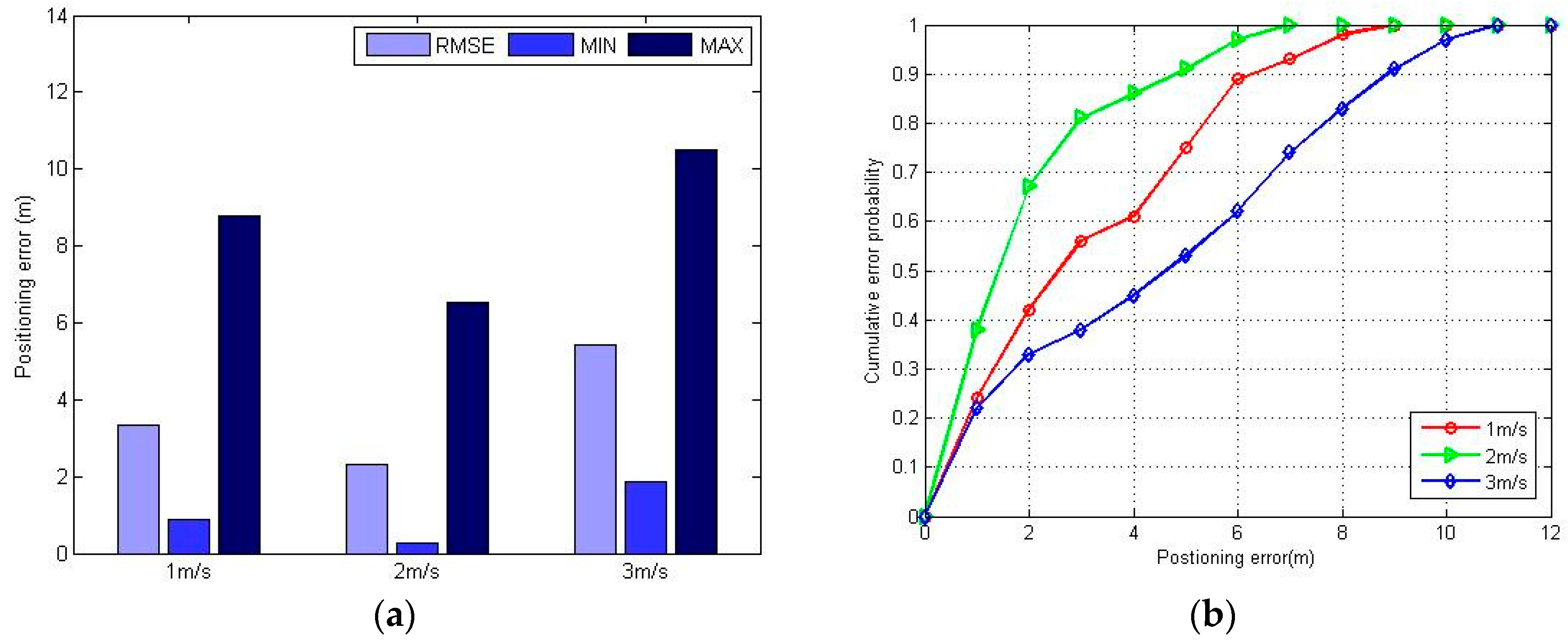
5.2. Performance Evaluation in a Library Building
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cheng, J.; Cai, Y.; Zhang, Q.; Yan, C. A new three-dimensional indoor positioning mechanism based on wireless lan. Math. Probl. Eng. 2014, 2014, 67–75. [Google Scholar] [CrossRef]
- Caron, C.; Chamberland-Tremblay, D.; Lapierre, C.; Hadaya, P.; Roche, S.; Saada, M. Indoor Positioning; Springer US: New York, NY, USA, 2008; pp. 553–559. [Google Scholar]
- Bahl, B.P.; Padmanabhan, V.N. Radar: An in-building RF-based user location and tracking system. In Proceedings of the IEEE Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies ( INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000.
- Bahl, P.; Padmanabhan, V.N.; Balachandran, A. Enhancements to the Radar User Location and Tracking System; Technical Report MSR-TR-2000-12; Microsoft Corporation: Redmond, WA, USA, 2000. [Google Scholar]
- Ahmed, S.H.; Bouk, S.H.; Mehmood, A.; Javaid, N.; Iwao, S. Effect of fast moving object on RSSI in WSN: An experimental approach. Comput. Sci. 2012, 281, 43–51. [Google Scholar]
- Rabiner, L.R. A tutorial on hidden Markov models and selected applications in speech recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Wallbaum, M.; Wasch, T. Markov Localization of Wireless Local Area Network Clients; Springer: Berlin, Germany; Heidelberg, Germany, 2004; pp. 1–15. [Google Scholar]
- Wallbaum, M.; Spaniol, O. Indoor Positioning Usingwireless local Area Networks. In Proceedings of the IEEE John Vincent Atanasoff International Symposium on Modern Computing, Sofia, Bulgaria, 3–6 October 2006; pp. 17–26.
- Seitz, J.; Vaupel, T.; Meyer, S.; GutiéRrez Boronat, J.; Thielecke, J. A Hidden Markov Model for Pedestrian Navigation. In Proceedings of the Positioning Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 120–127.
- Liu, J.; Chen, R.; Pei, L.; Chen, W.; Tenhunen, T.; Kuusniemi, H.; Kroger, T.; Chen, Y. Accelerometer Assisted Robust Wireless Signal Positioning Based on a Hidden Markov Model. In Proceedings of the Position Location & Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 488–497.
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A hybrid smartphone indoor positioning solution for mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Coleri Ergen, S.; Tetikol, H.S.; Kontik, M.; Sevlian, R.; Rajagopal, R.; Varaiya, P. Rssi-fingerprinting-based mobile phone localization with route constraints. IEEE Trans. Veh. Technol. 2014, 63, 423–428. [Google Scholar] [CrossRef]
- Alexander, M.N. Energetics and optimization of human walking and running: The 2000 Raymond Pearl memorial lecture. Am. J. Hum. Biol. 2002, 14, 641–648. [Google Scholar] [CrossRef] [PubMed]
- Pu, C.C.; Chung, W.Y.; Pu, C.C.; Chung, W.Y. Indoor RSSI characterization using statistical in wireless sensor network. J. Korea Inst. Inf. Commun. Eng. 2007, 11, 2172–2178. [Google Scholar]
- Rabiner, L.; Juang, B.H. Fundamentals of Speech Recognition; Pearson Education, First Indian Reprint; Prentice-Hall: Englewoord Cliffs, NJ, USA, 1993. [Google Scholar]
- Ayodele, T.O. Introduction to Machine Learning; MIT Press: Cambridge, MA, USA, 2004; pp. 104–138. [Google Scholar]
- Xia, Y.; Zhang, Z.; Ma, L. Radio map updated method based on subscriber locations in indoor wlan localization. Syst. Eng. Electron. J. 2015, 26, 1202–1209. [Google Scholar] [CrossRef]
- Forney, G.D. The Viterbi algorithm. Proc. IEEE 1973, 61, 268–278. [Google Scholar] [CrossRef]
- Castro, P.; Chiu, P.; Kremenek, T.; Muntz, R. A Probabilistic Room Location Service for Wireless Networked Environments. In Proceedings of the Ubicomp 2001: Ubiquitous Computing, Third International Conference Atlanta, Georgia, USA, 30 September–2 October 2001; pp. 18–34.
- Madigan, D.; Einahrawy, E.; Martin, R.P.; Ju, W.H.; Krishnan, P.; Krishnakumar, A.S. Bayesian indoor positioning systems. In Proceedings of the 24th Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2005), Miami, FL, USA, 13–17 March 2005.




© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, Y.; Liu, J.; Liu, S.; Bai, Y. An Indoor Pedestrian Positioning Method Using HMM with a Fuzzy Pattern Recognition Algorithm in a WLAN Fingerprint System. Sensors 2016, 16, 1447. https://doi.org/10.3390/s16091447
Ni Y, Liu J, Liu S, Bai Y. An Indoor Pedestrian Positioning Method Using HMM with a Fuzzy Pattern Recognition Algorithm in a WLAN Fingerprint System. Sensors. 2016; 16(9):1447. https://doi.org/10.3390/s16091447
Chicago/Turabian StyleNi, Yepeng, Jianbo Liu, Shan Liu, and Yaxin Bai. 2016. "An Indoor Pedestrian Positioning Method Using HMM with a Fuzzy Pattern Recognition Algorithm in a WLAN Fingerprint System" Sensors 16, no. 9: 1447. https://doi.org/10.3390/s16091447
APA StyleNi, Y., Liu, J., Liu, S., & Bai, Y. (2016). An Indoor Pedestrian Positioning Method Using HMM with a Fuzzy Pattern Recognition Algorithm in a WLAN Fingerprint System. Sensors, 16(9), 1447. https://doi.org/10.3390/s16091447