
Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications

Abstract
:1. Introduction
2. Location Technologies in Smartphones
3. Mathematical Foundation and Research Methodology
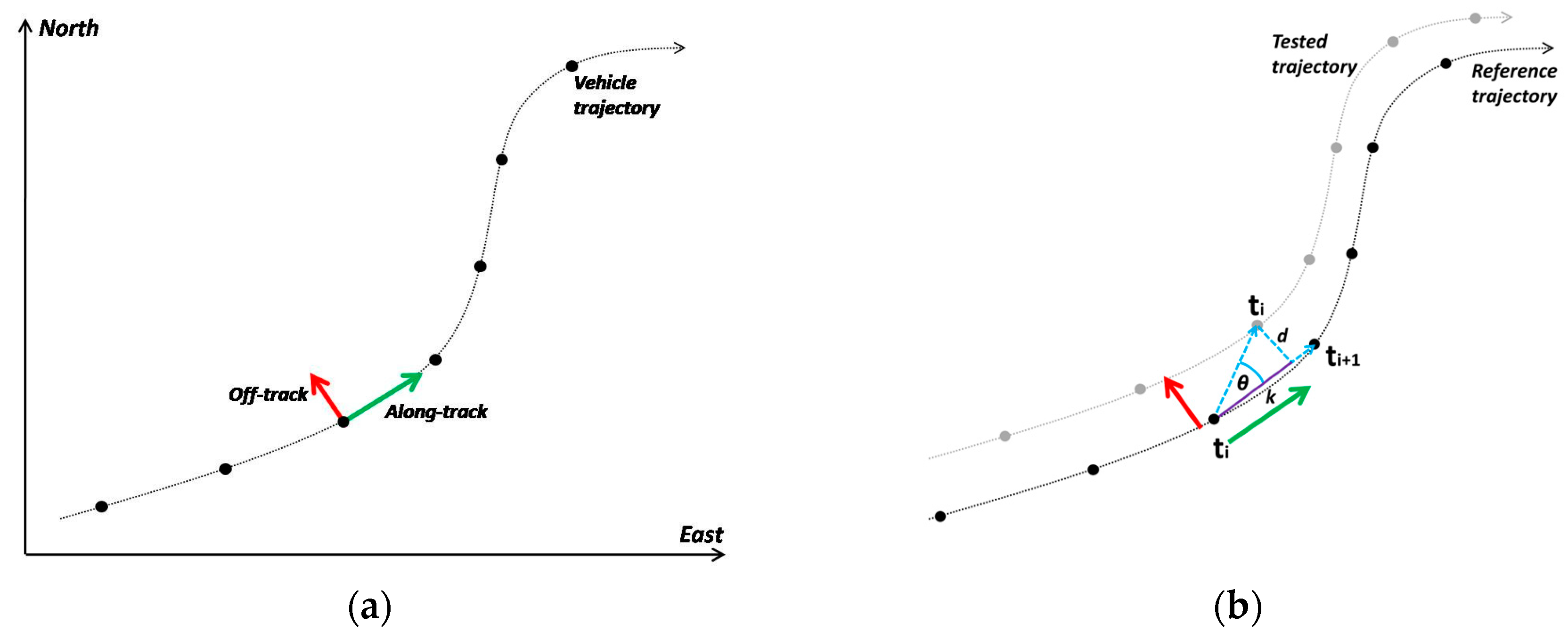
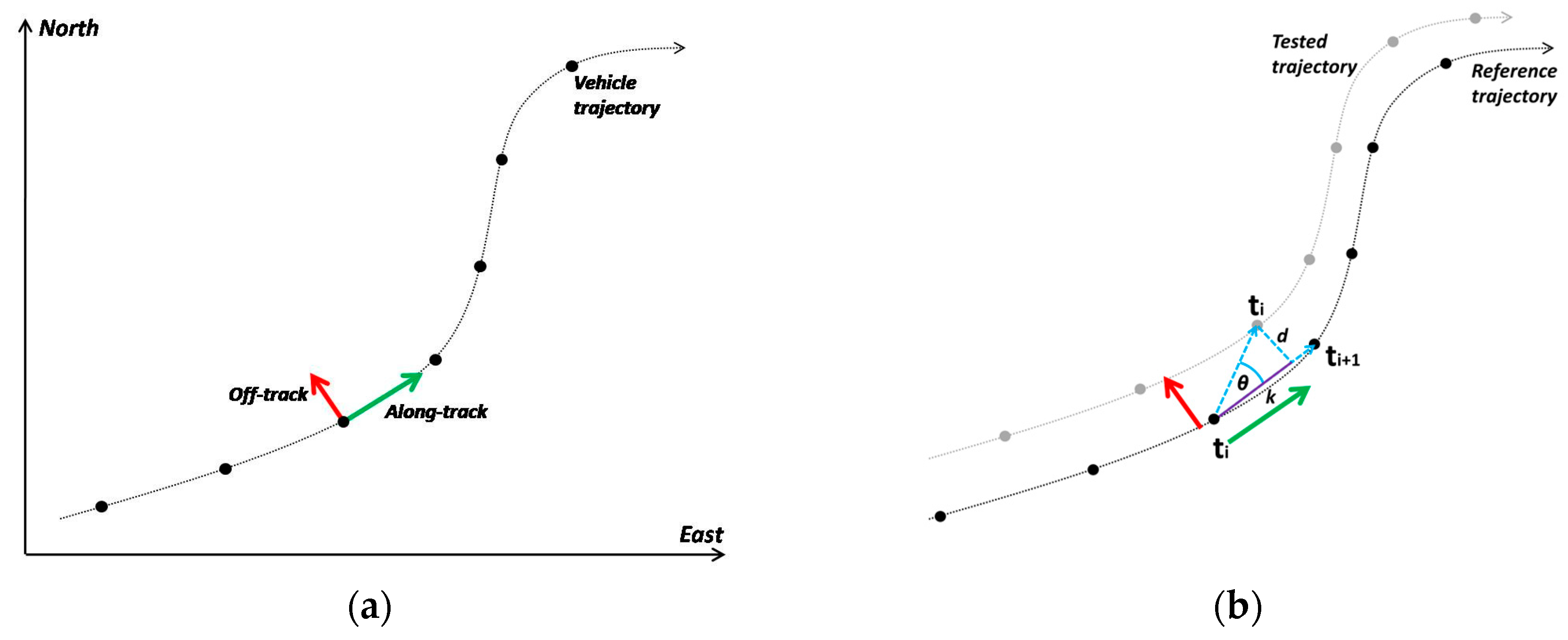
3.1. Positioning Precision and Trueness
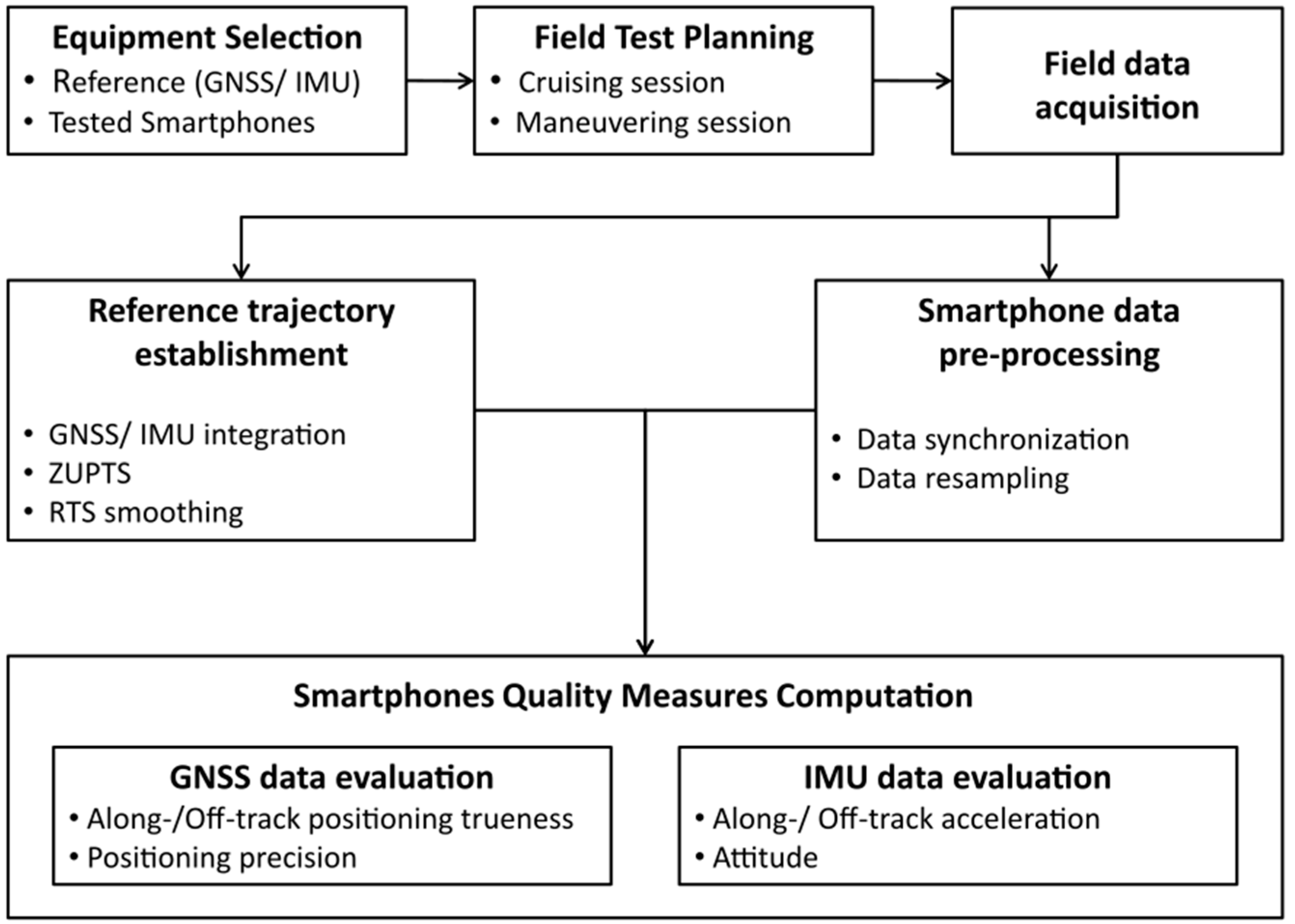
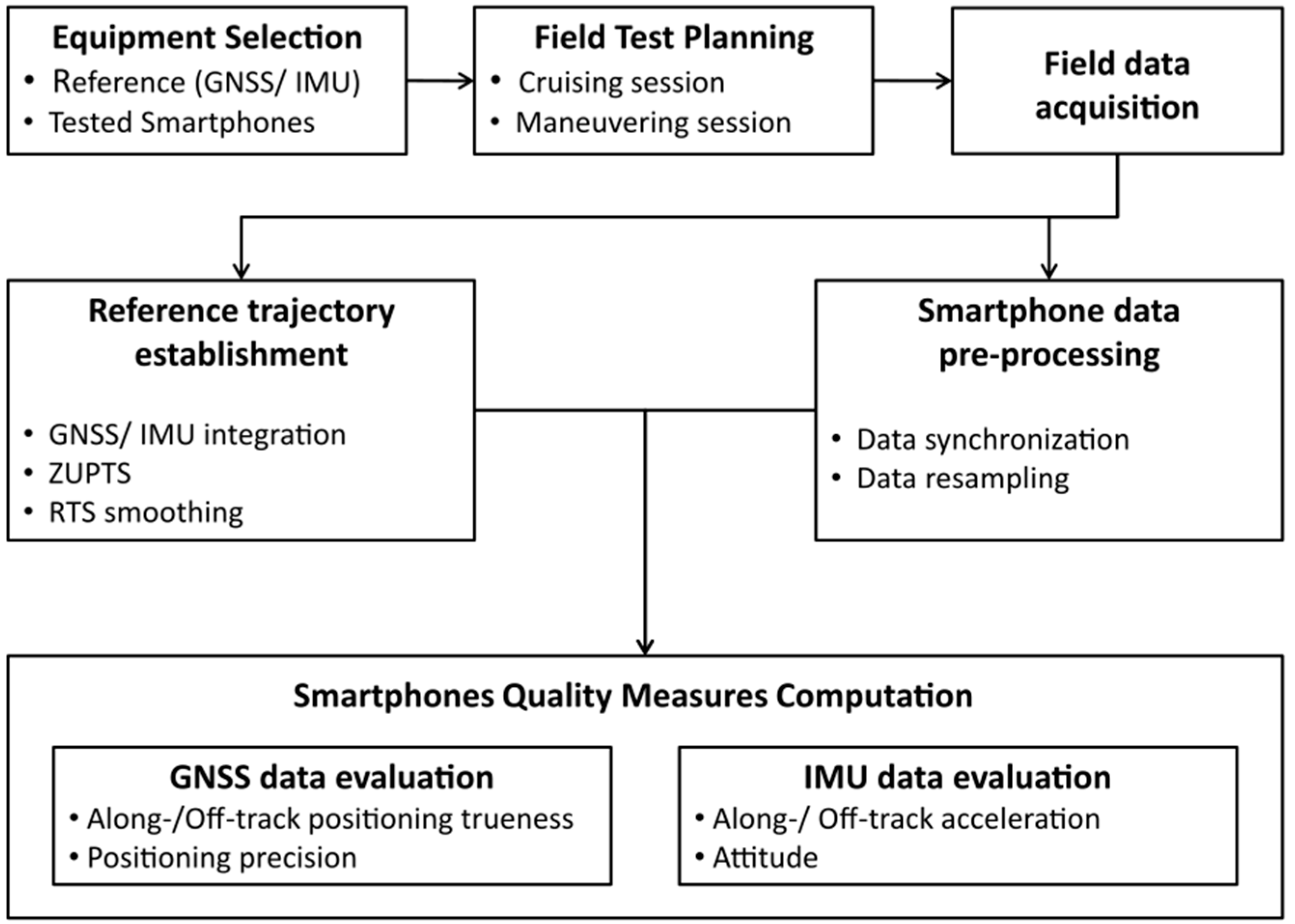
3.2. Testing Methodology
4. Navigation Sensors, Driving Scenarios and Field Work
4.1. Tested Smartphones and High-End Navigation System
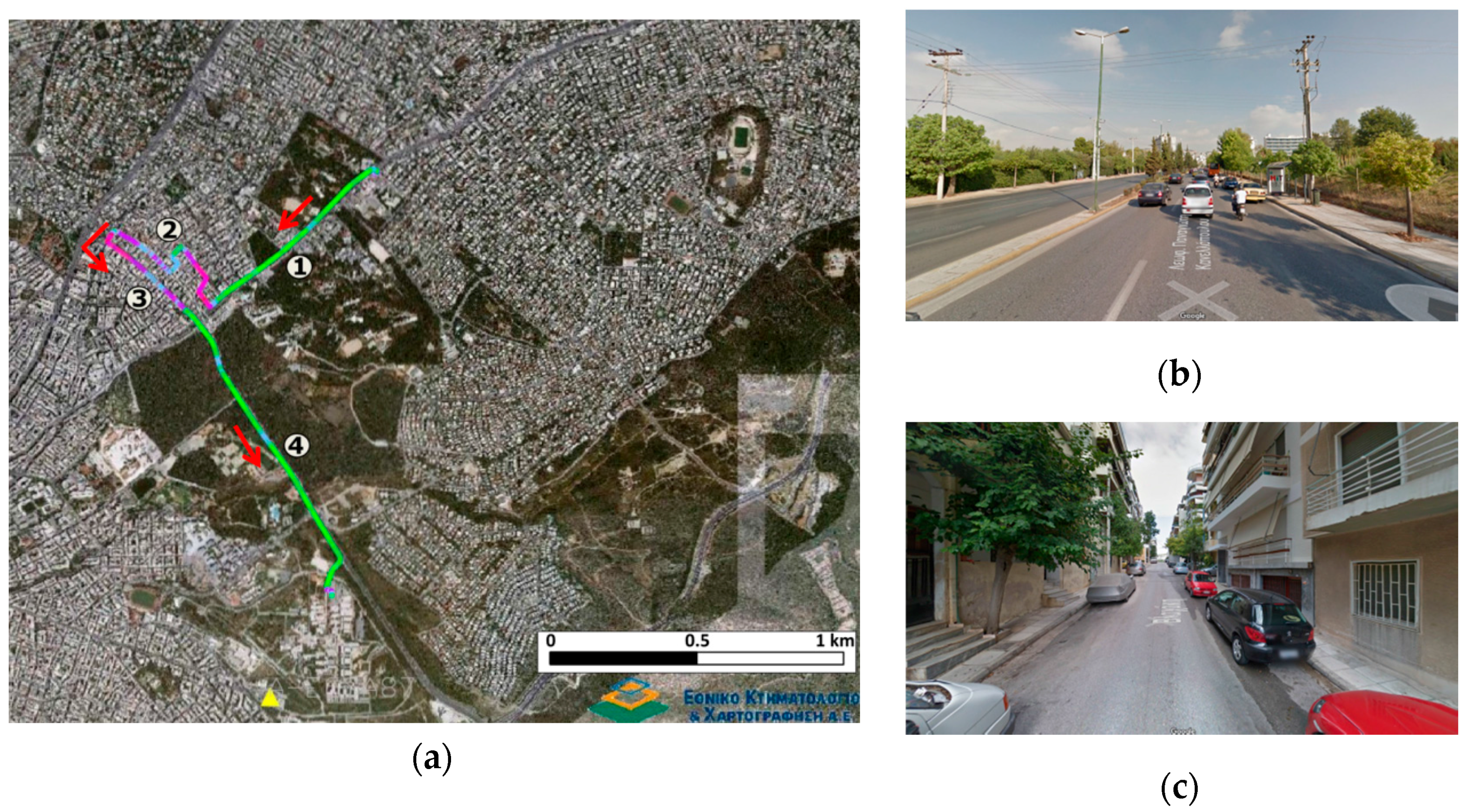
4.2. Vehicle Cruising and Maneuvering Tests
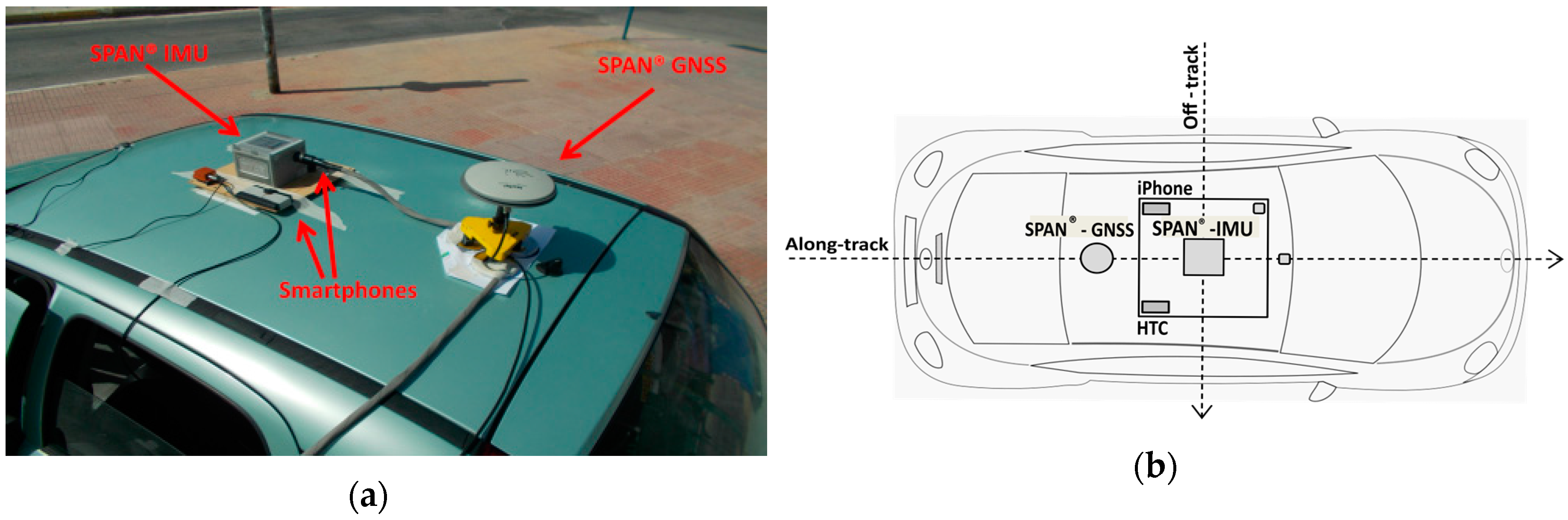
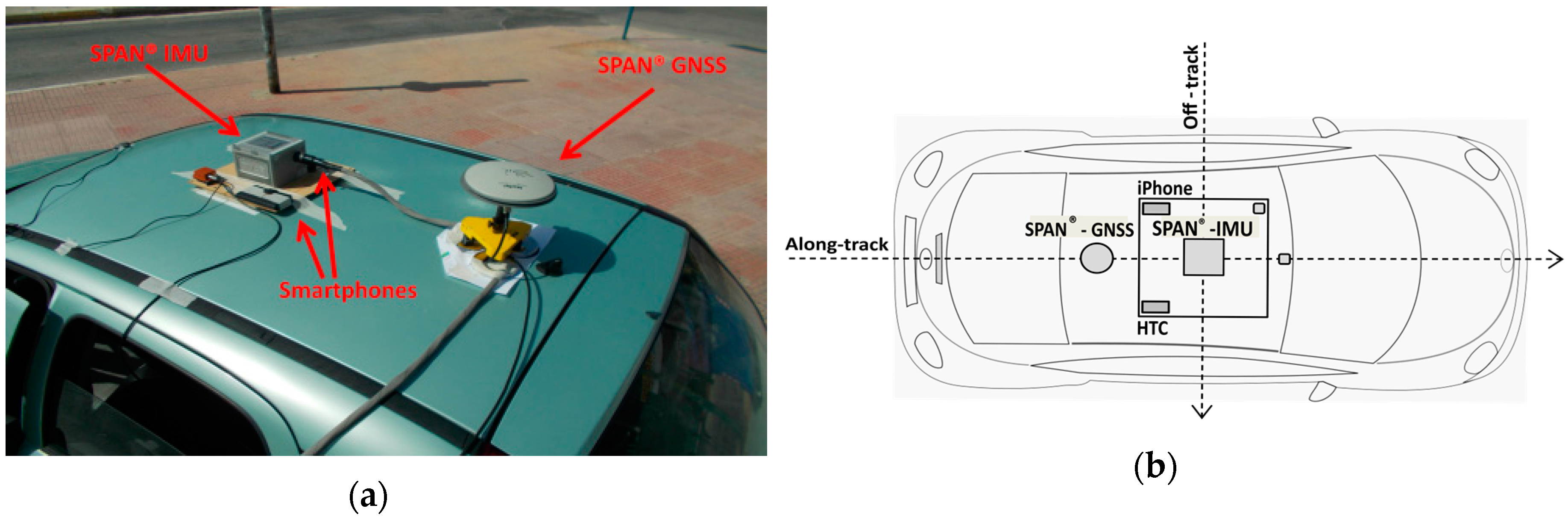
4.3. Sensor Setup and Field Experiments
5. Reference Trajectory Establishment and Smartphone Data Pre-Processing
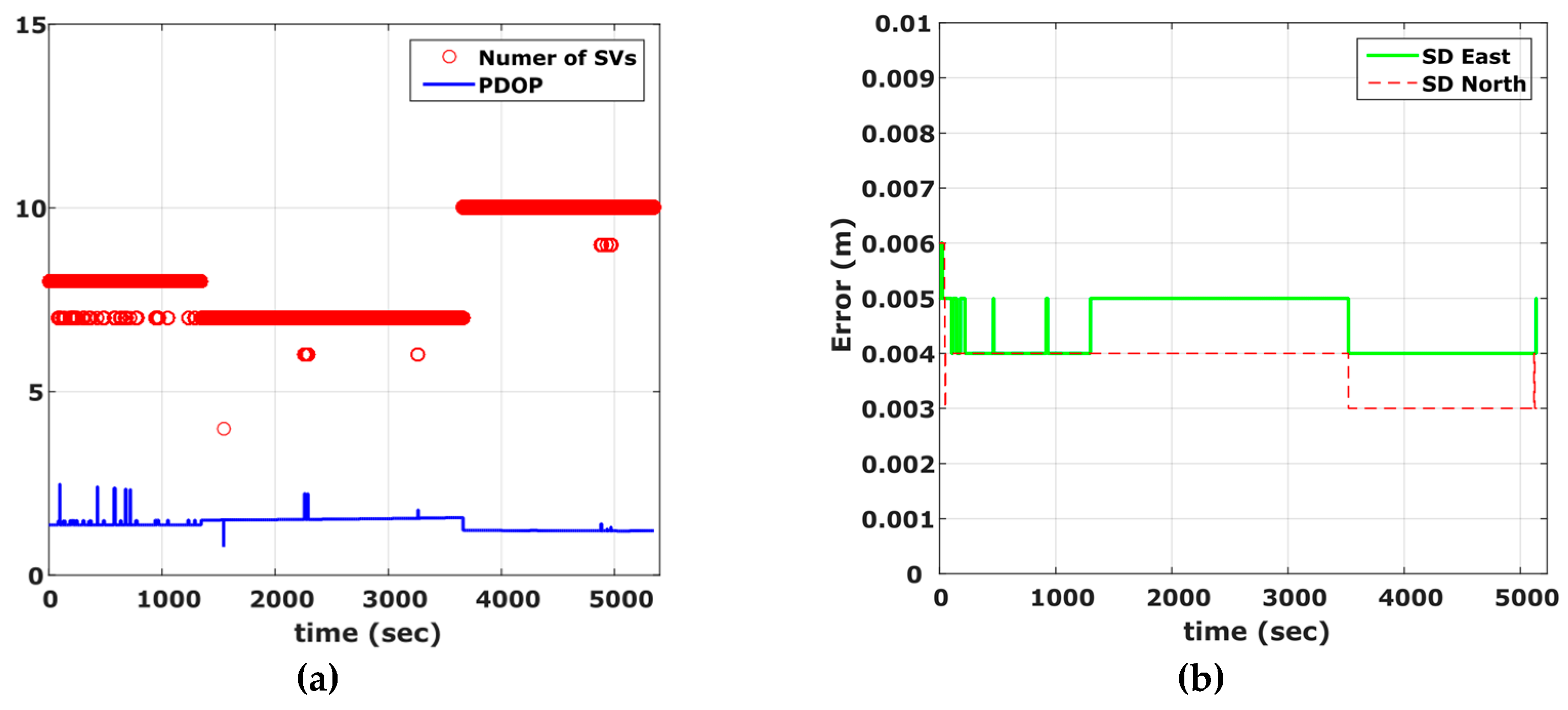
5.1. Reference Trajectory Establishment
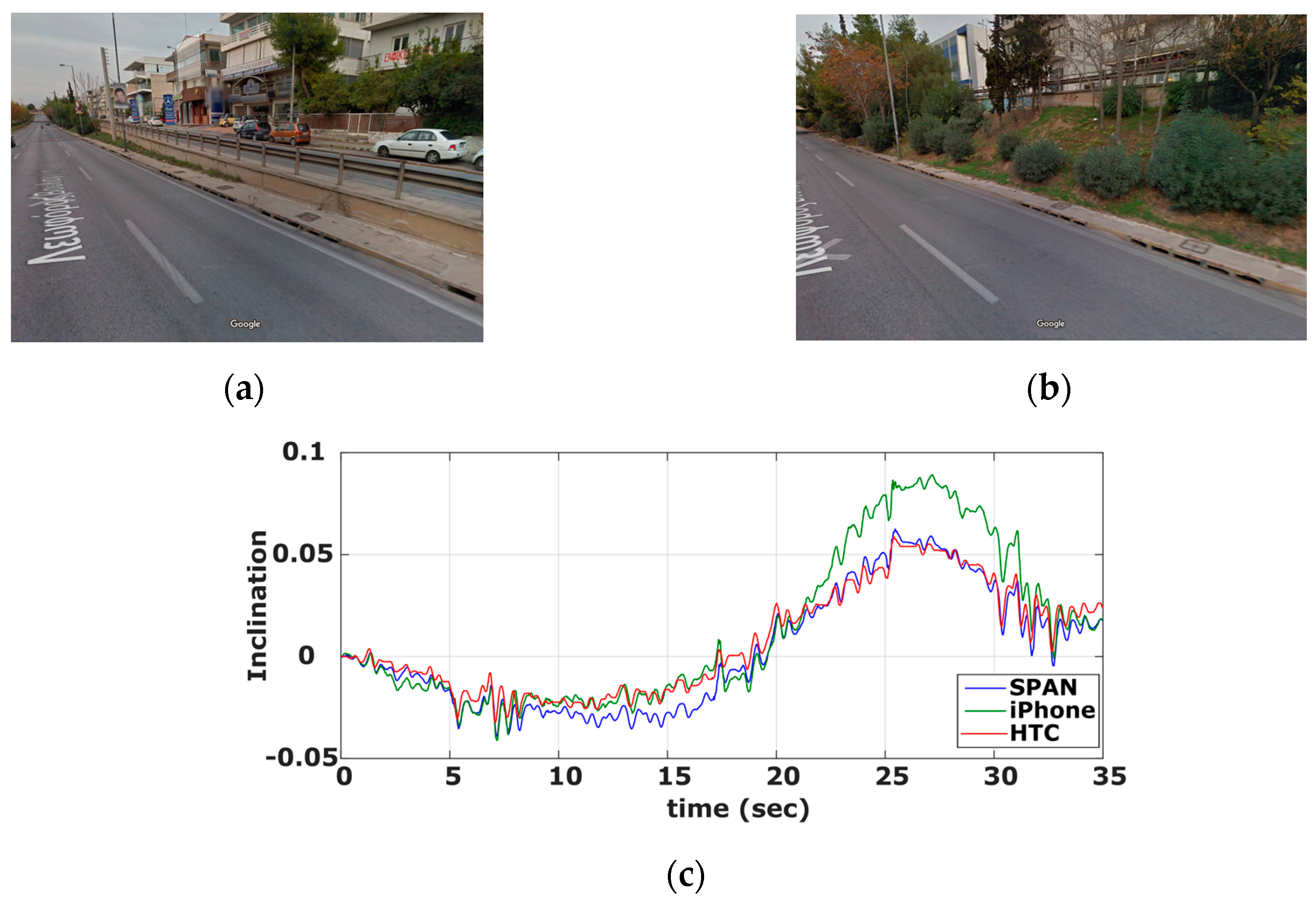
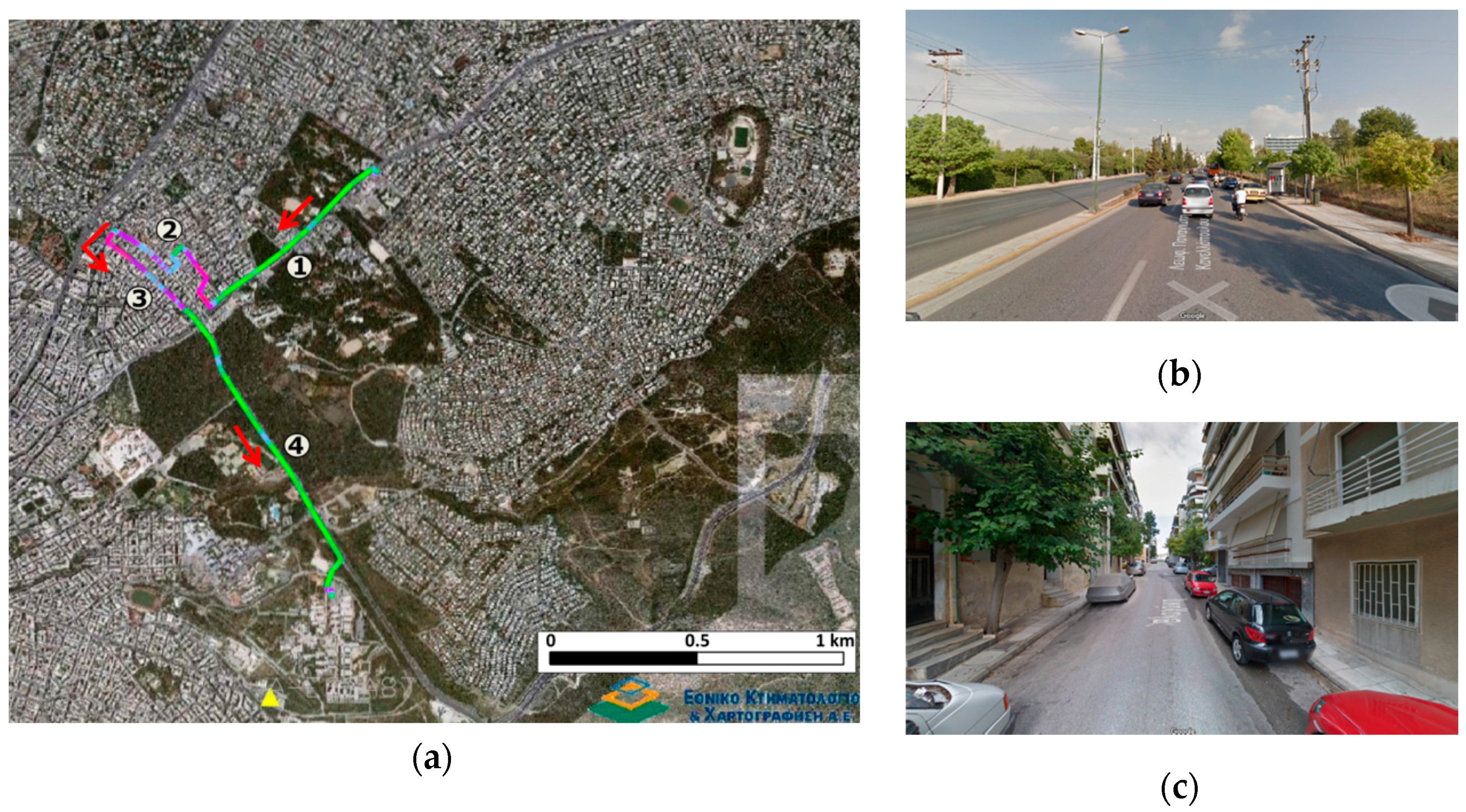
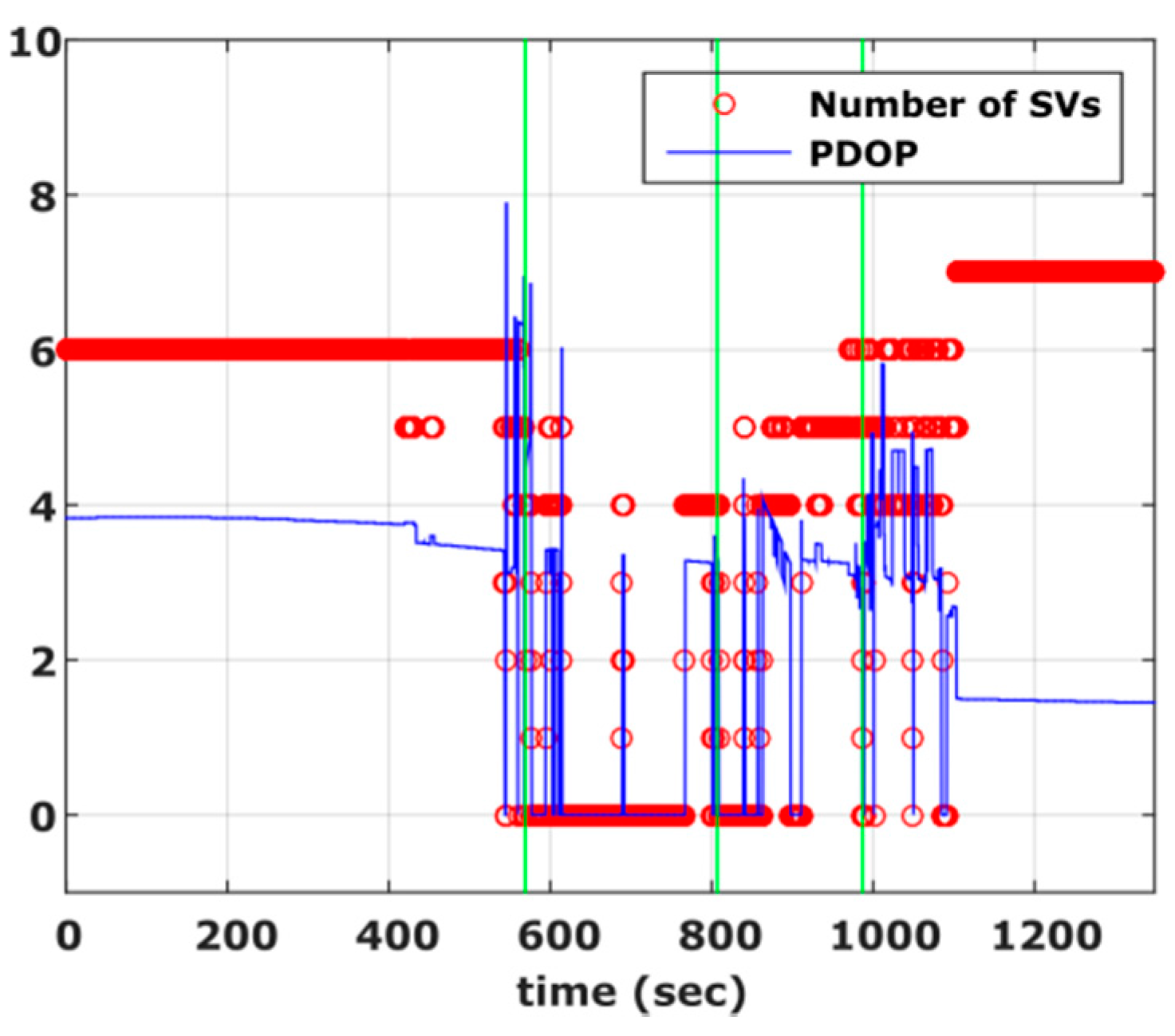
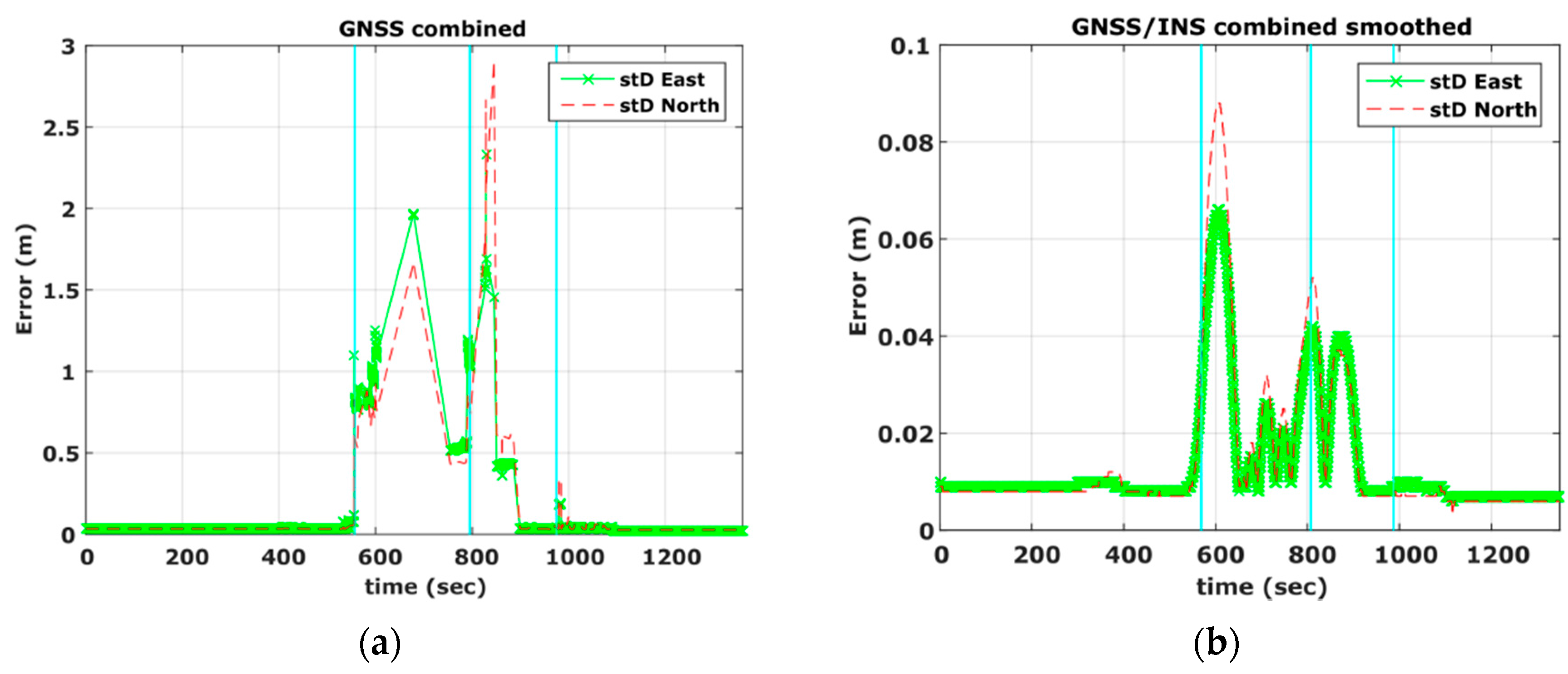
5.1.1. Vehicle Cruising Tests
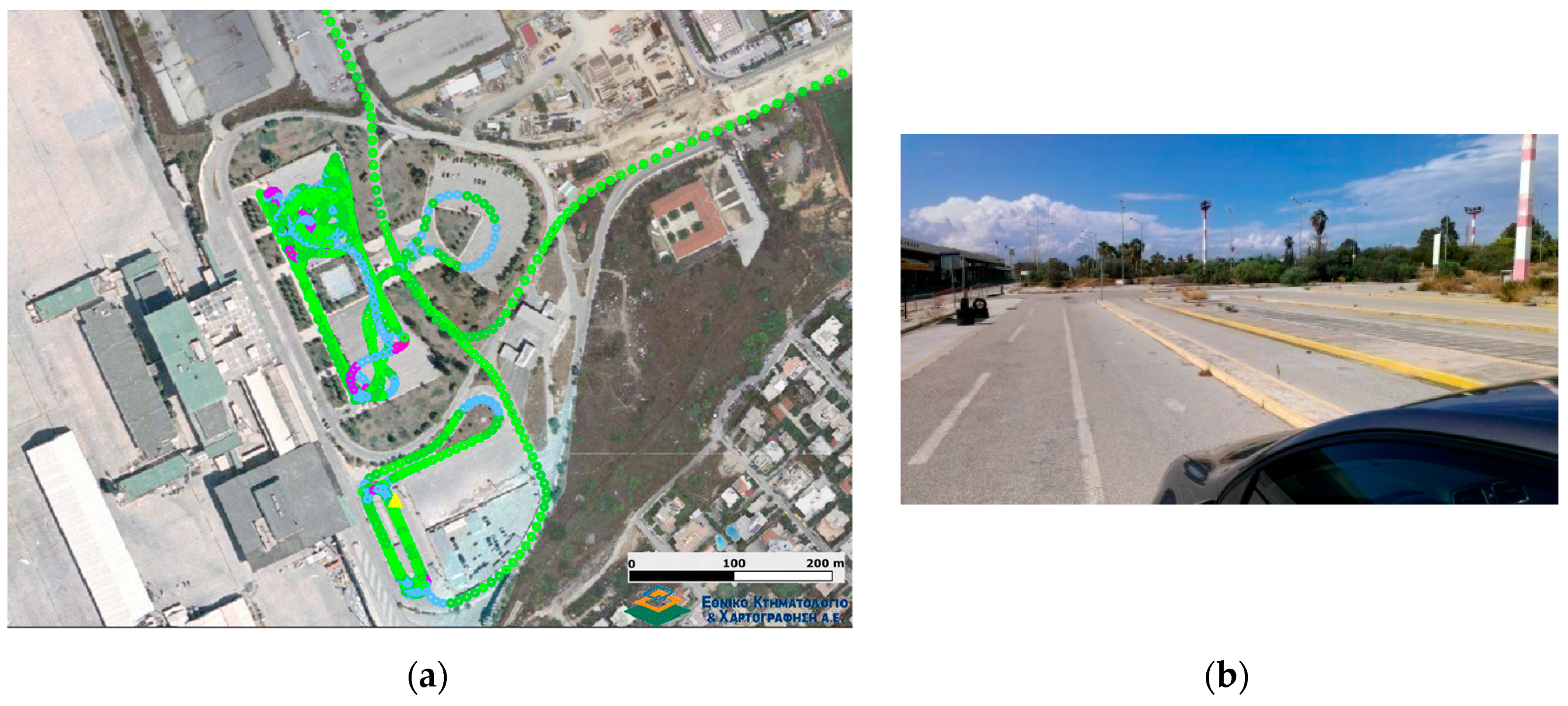
5.1.2. Vehicle Maneuvering Tests
5.2. Smartphone Data Pre-Processing
6. Smartphone Data Analysis and Evaluation
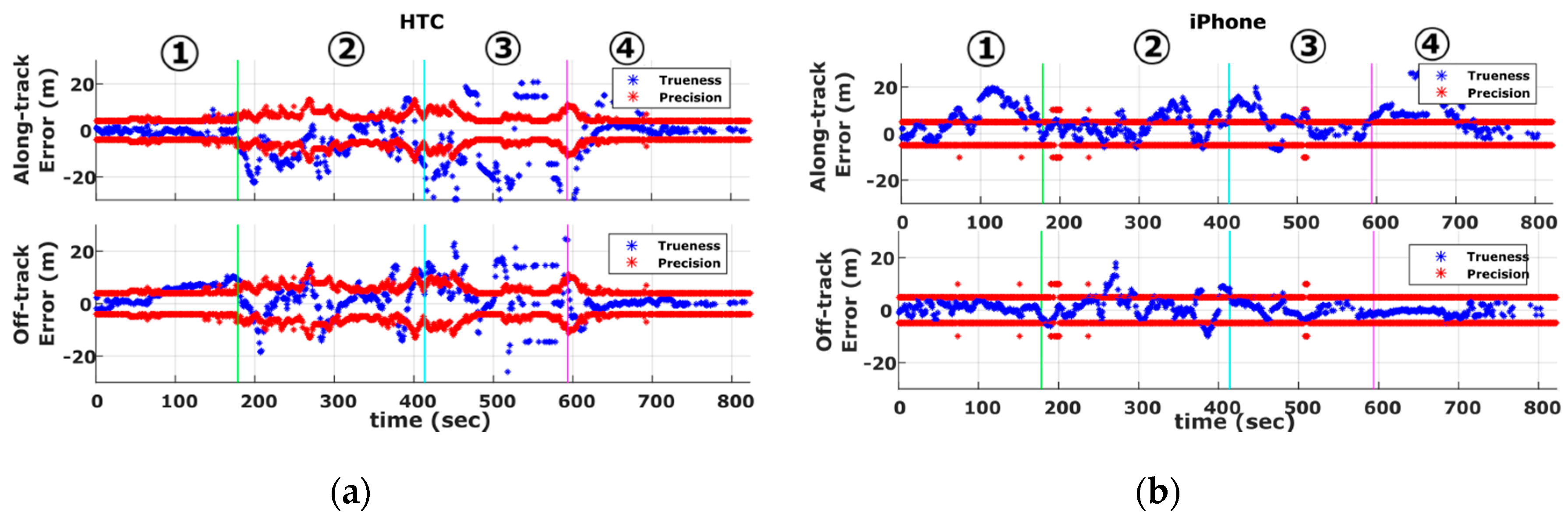
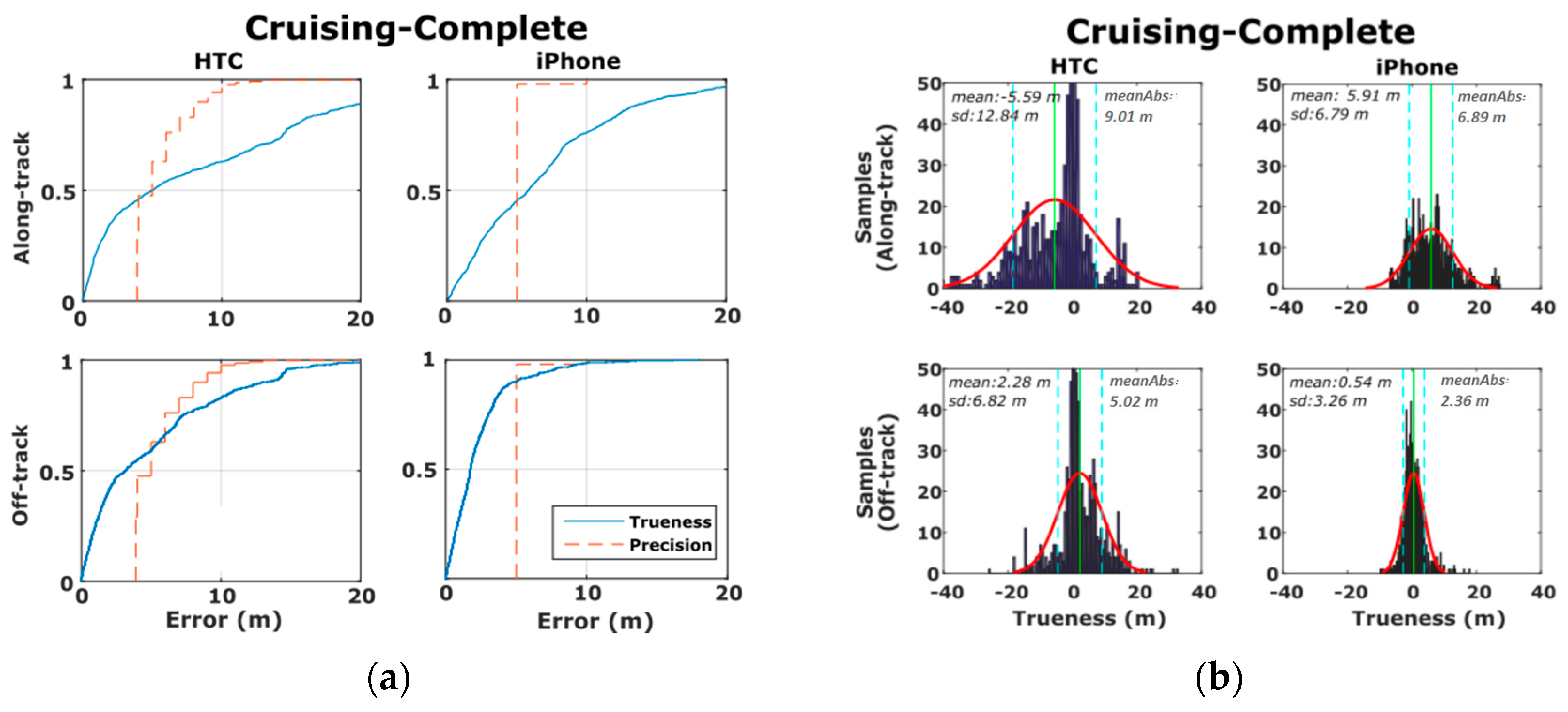
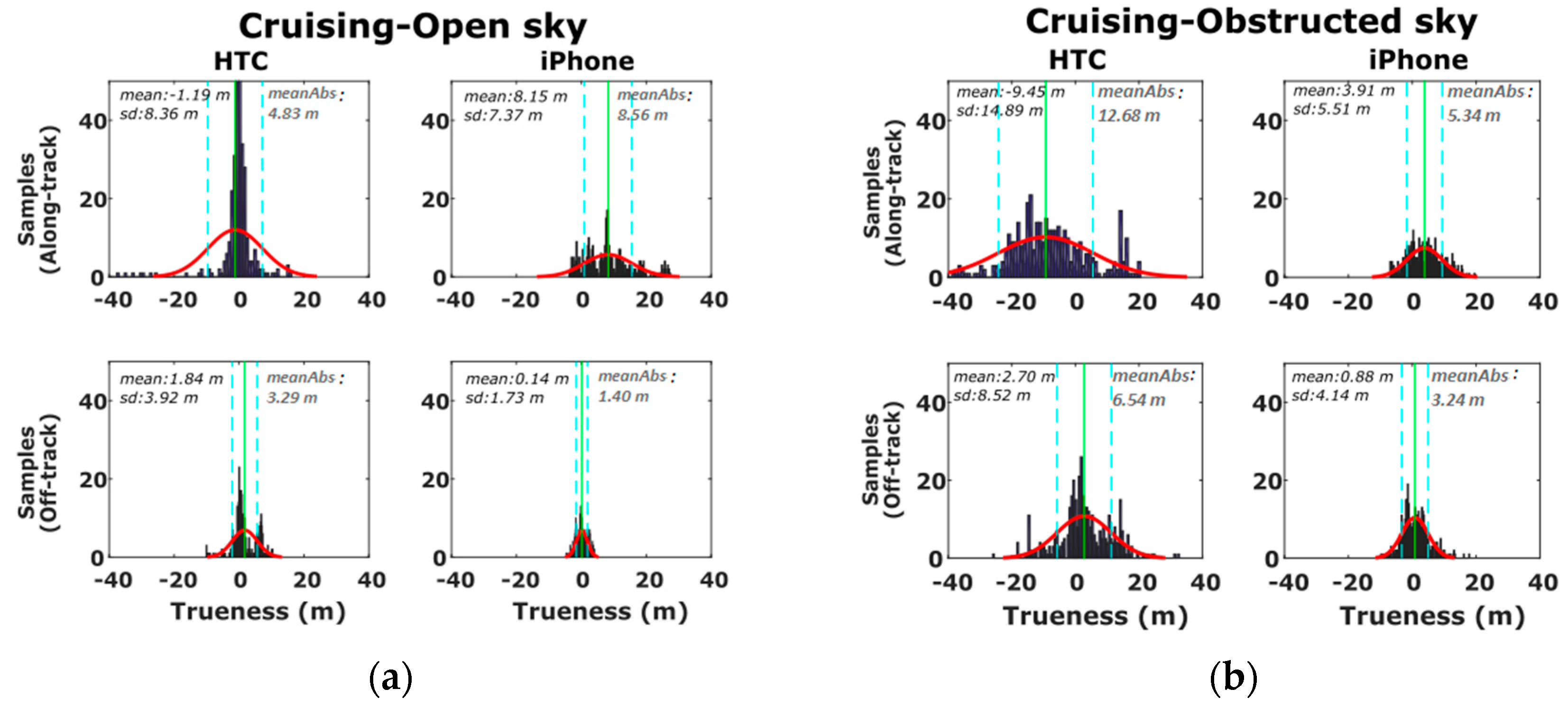
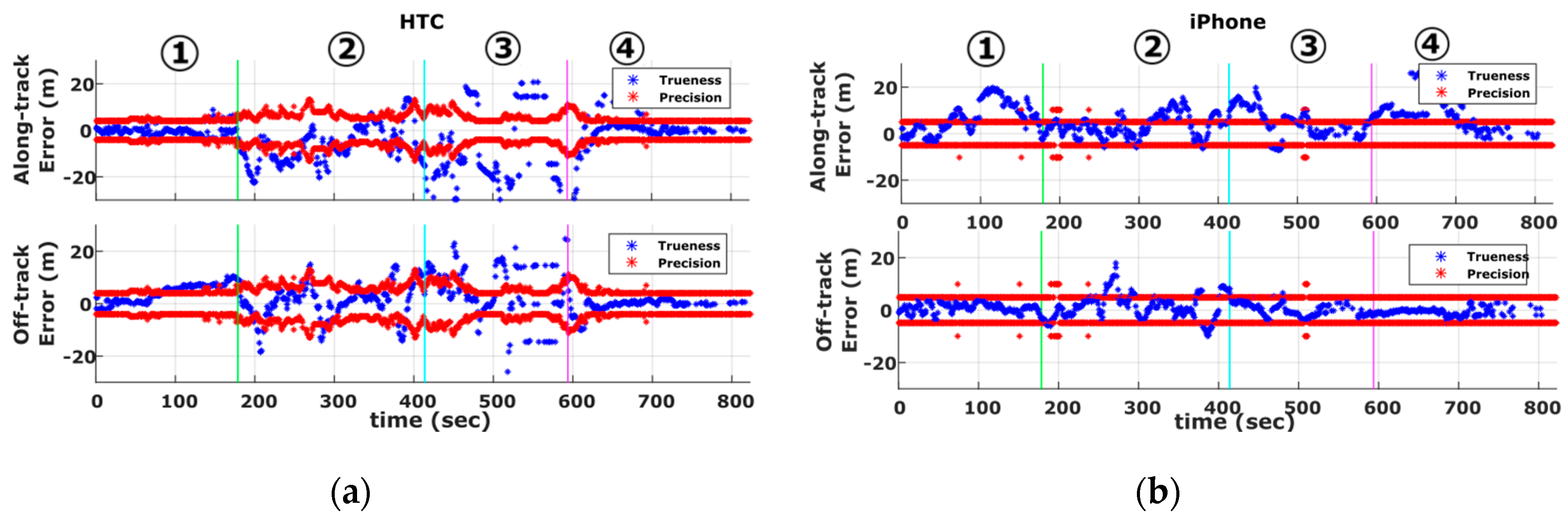
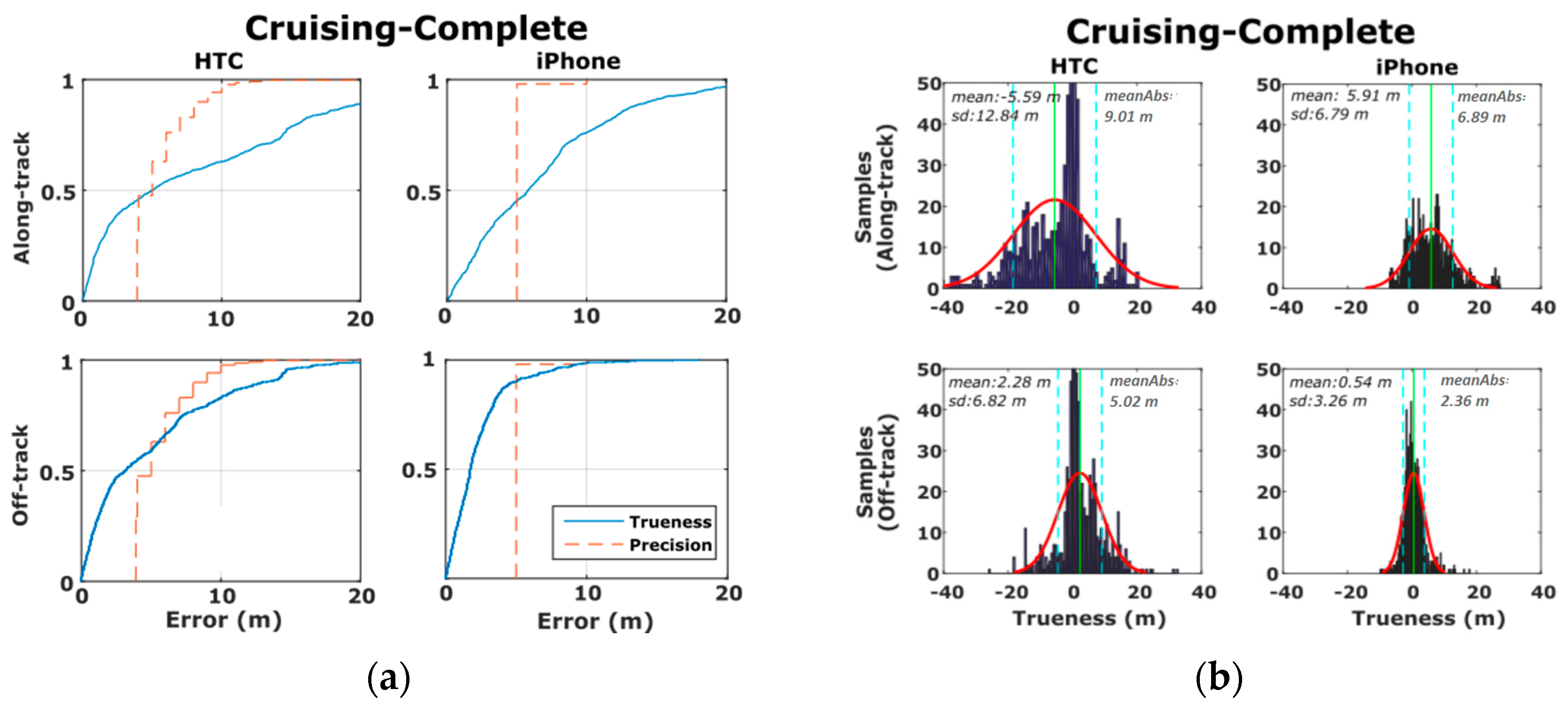
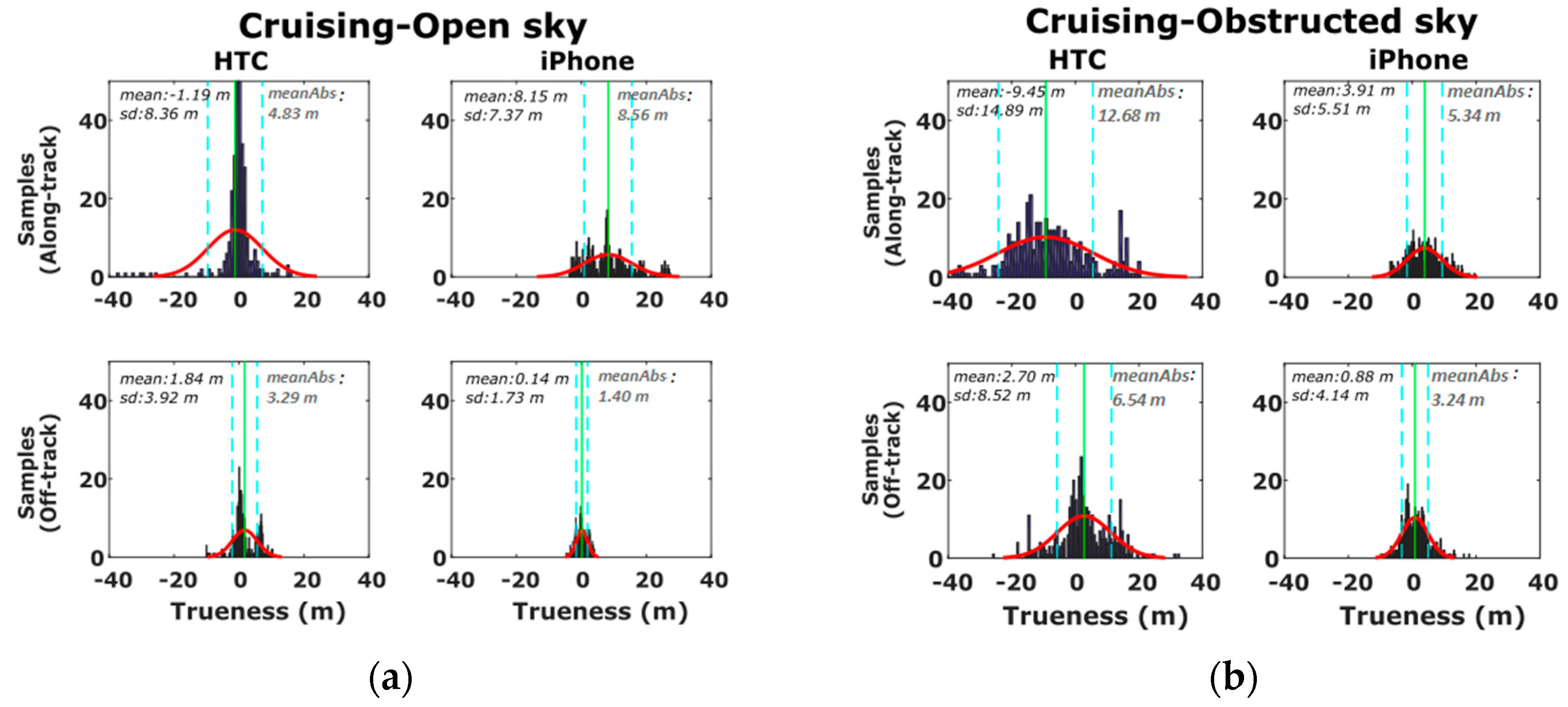
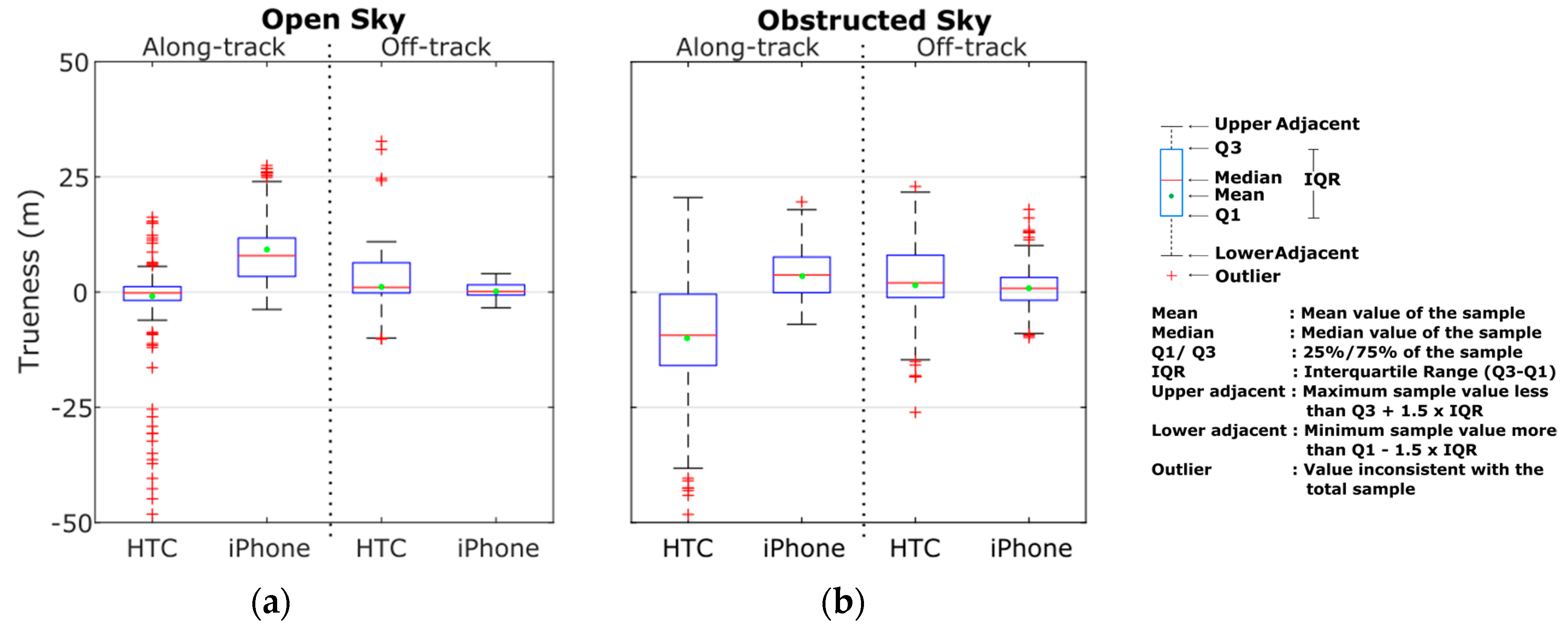
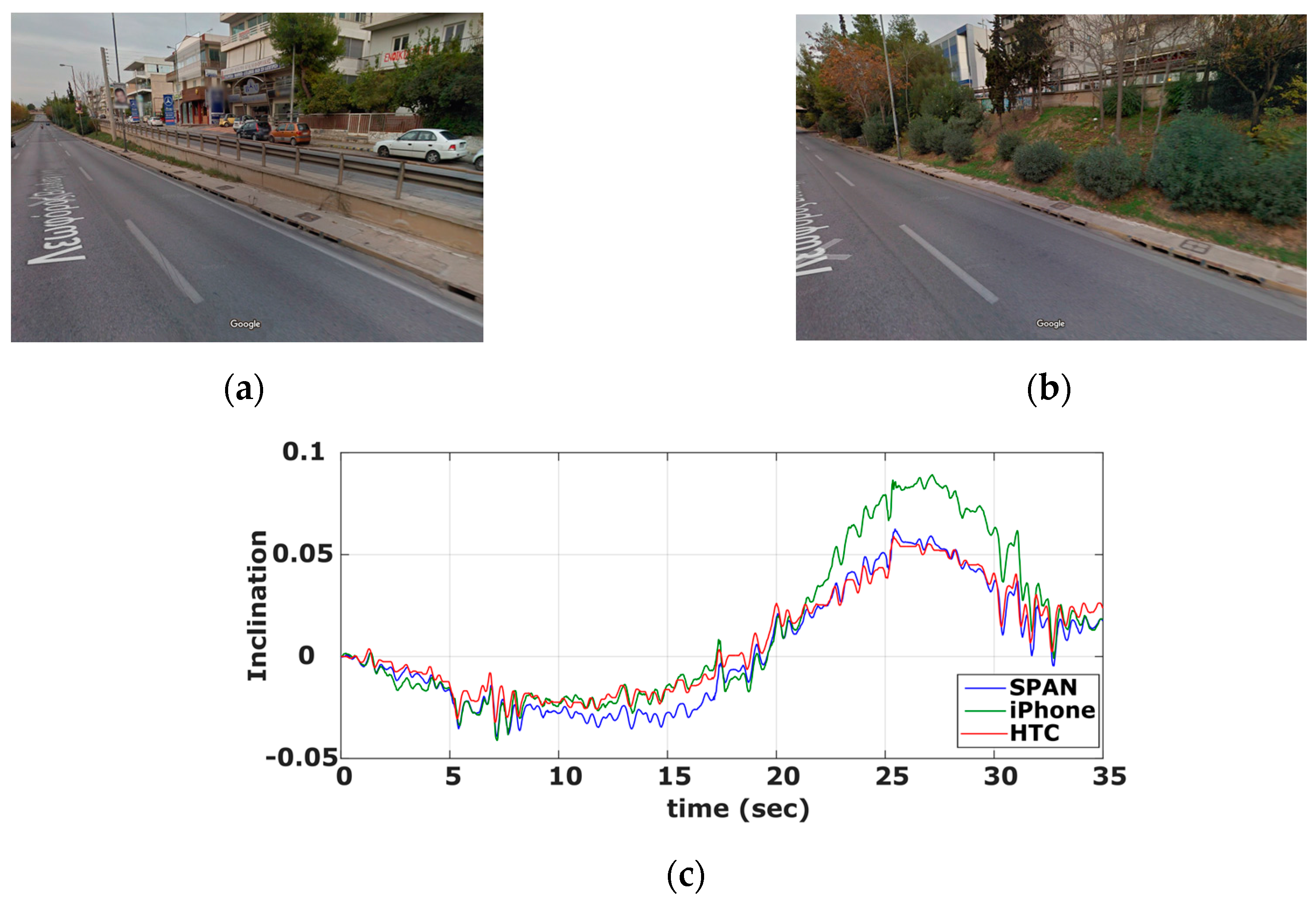
6.1. Cruising Data
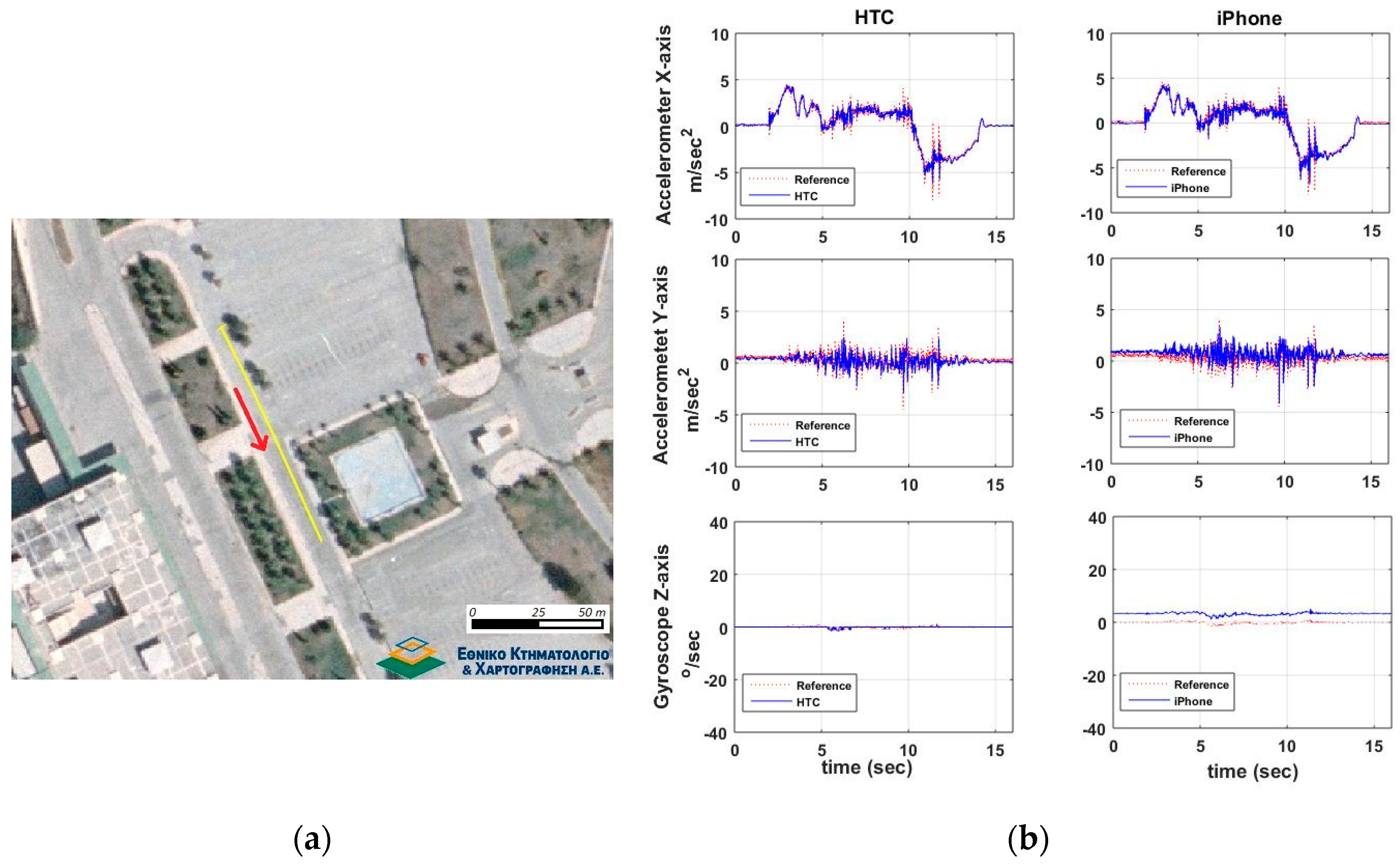
6.2. Maneuvering Data
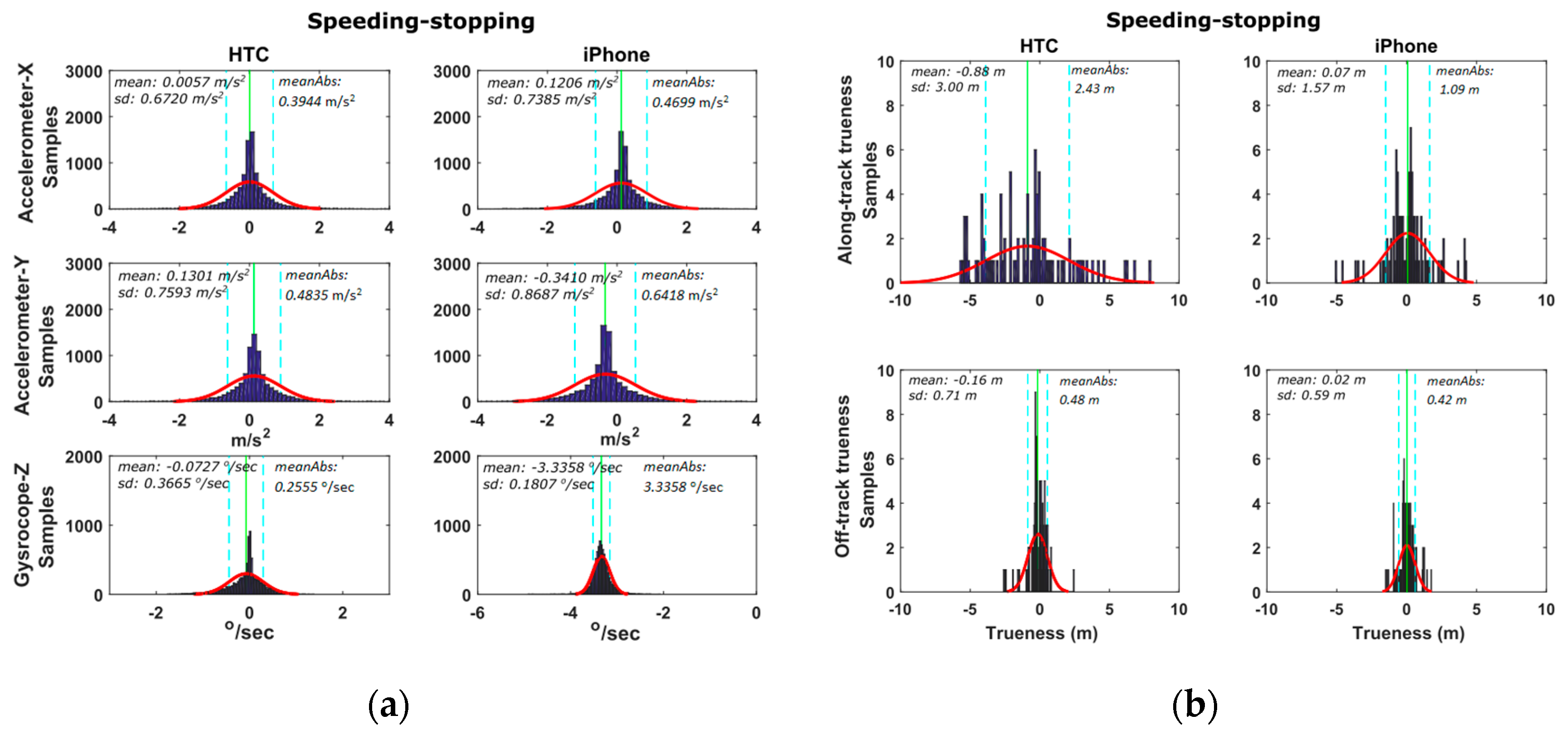
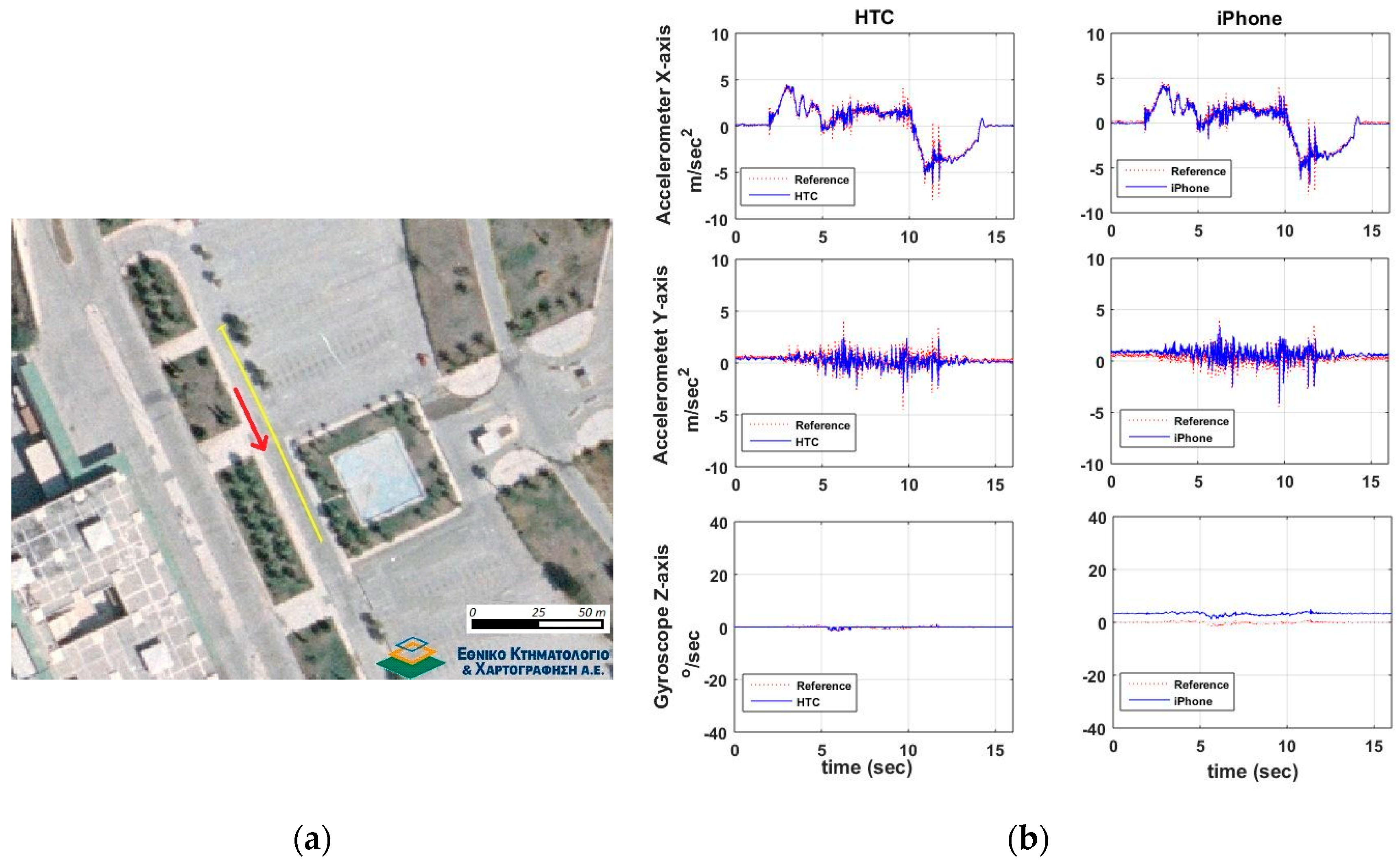
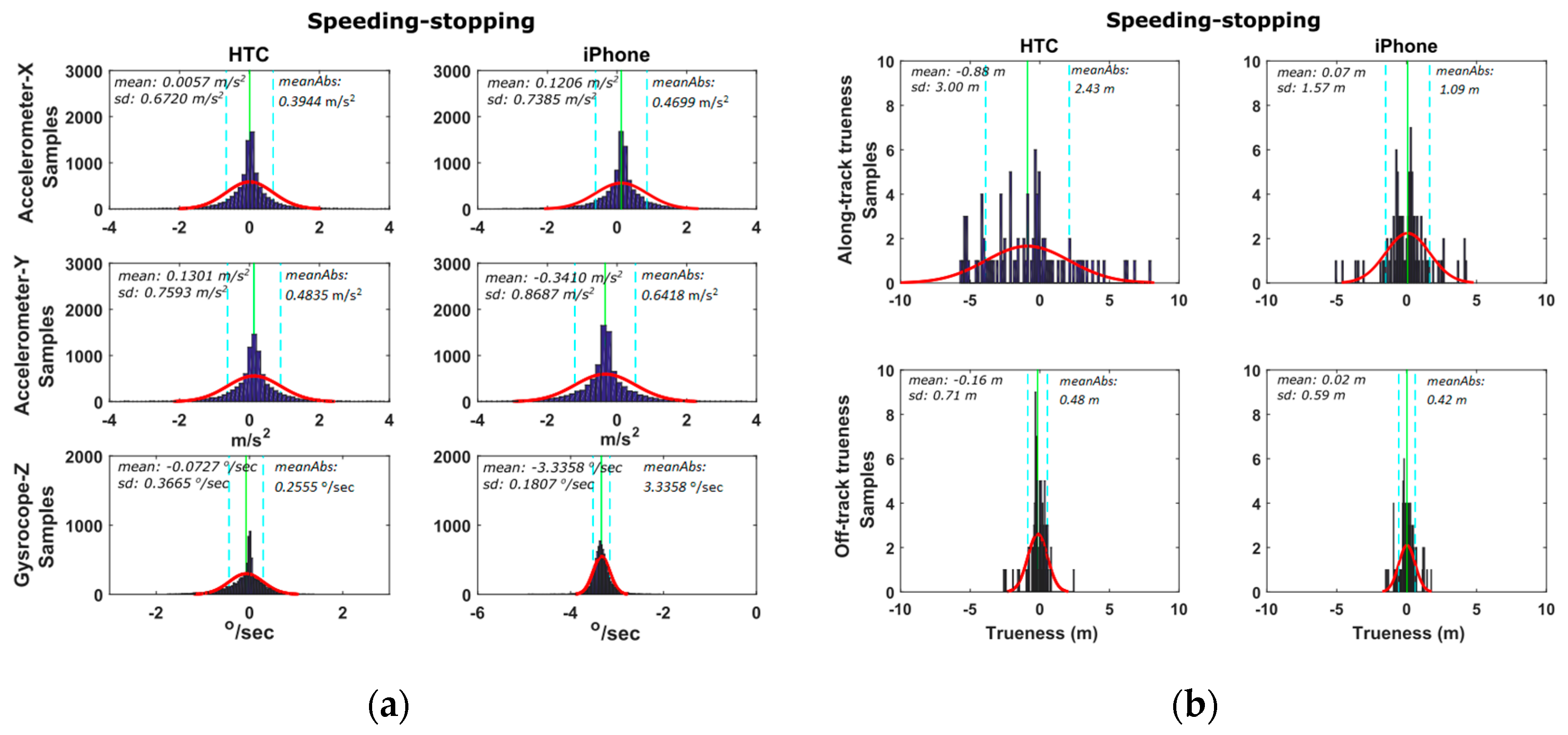
6.2.1. Speeding-Stopping Maneuvers
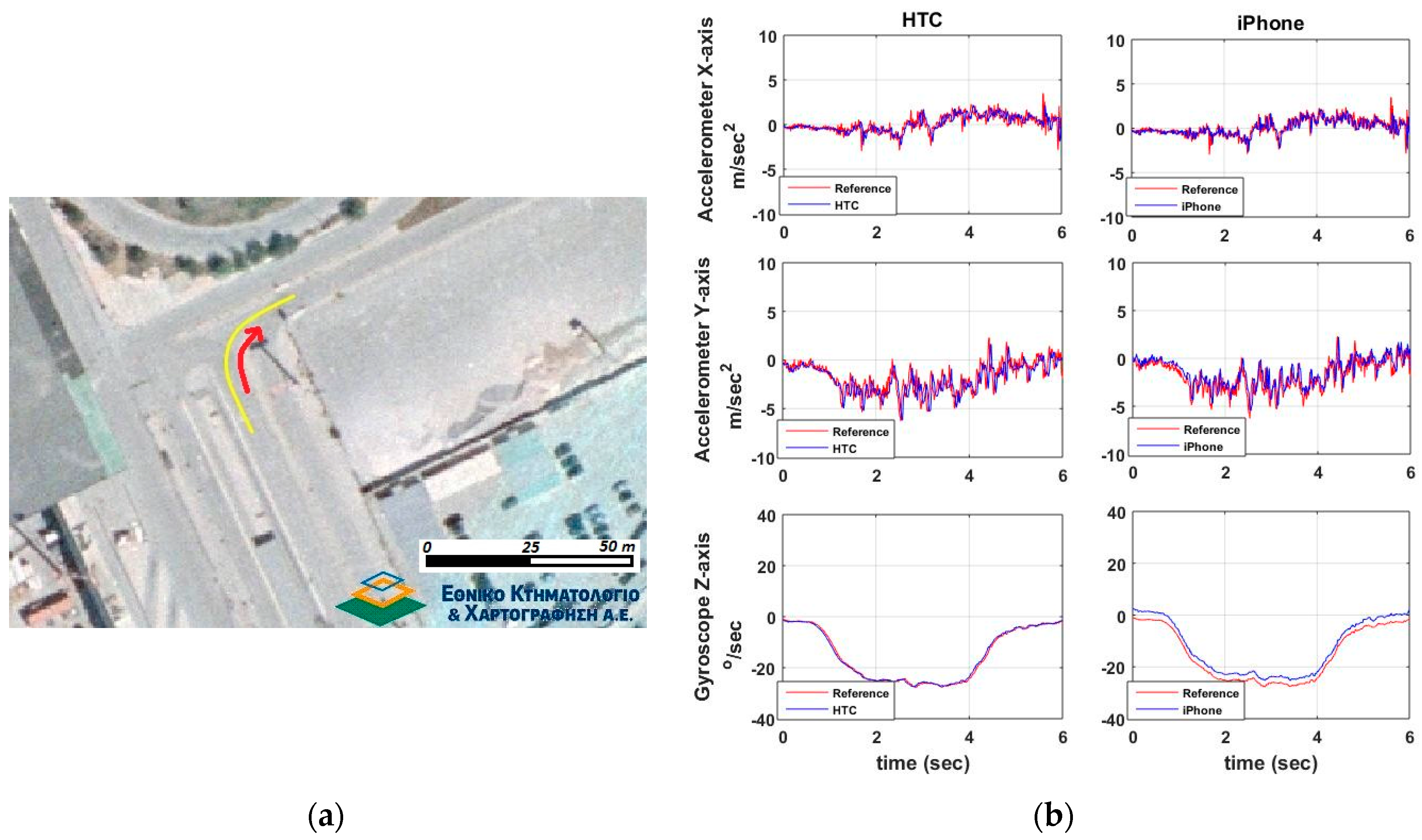
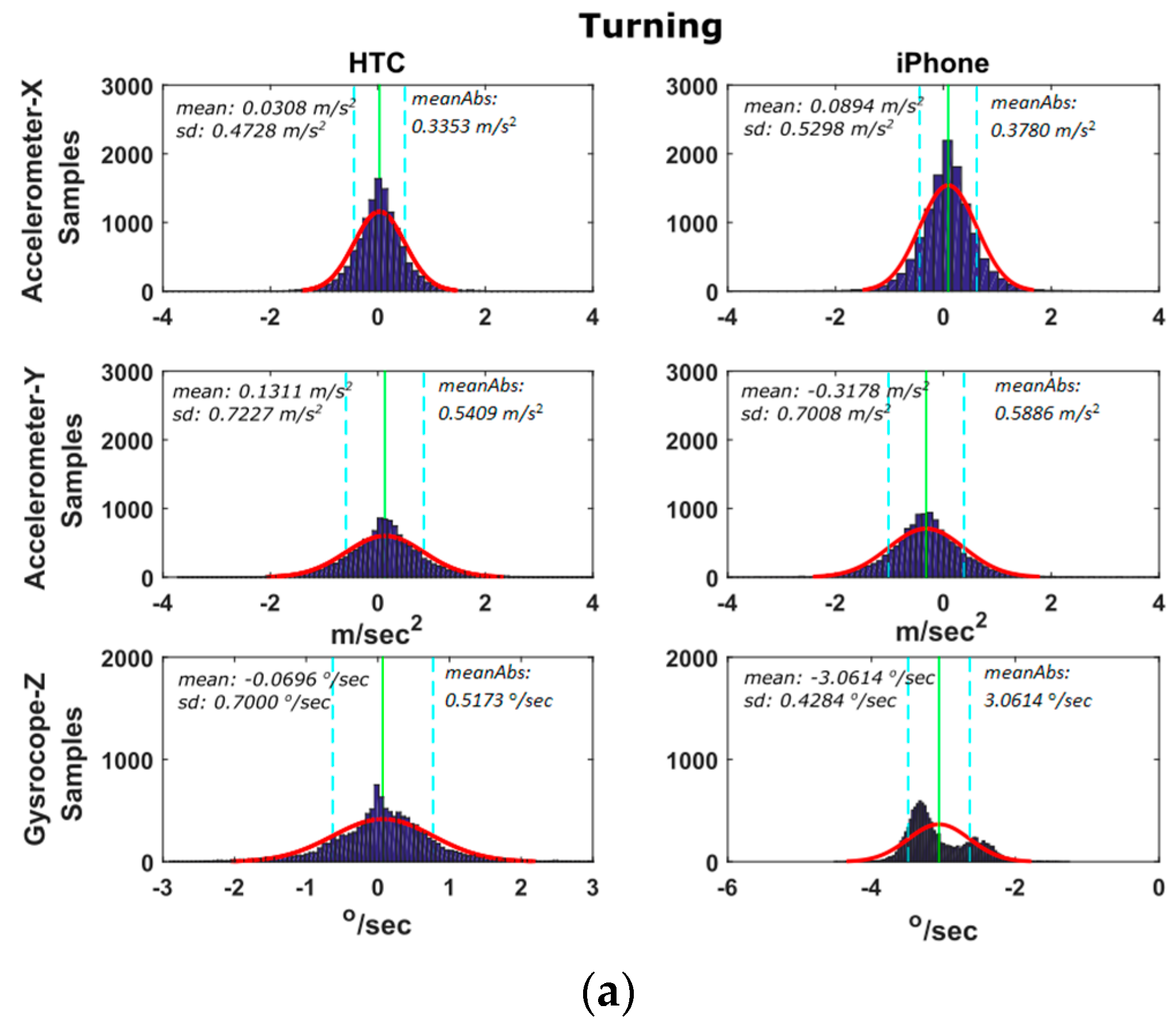
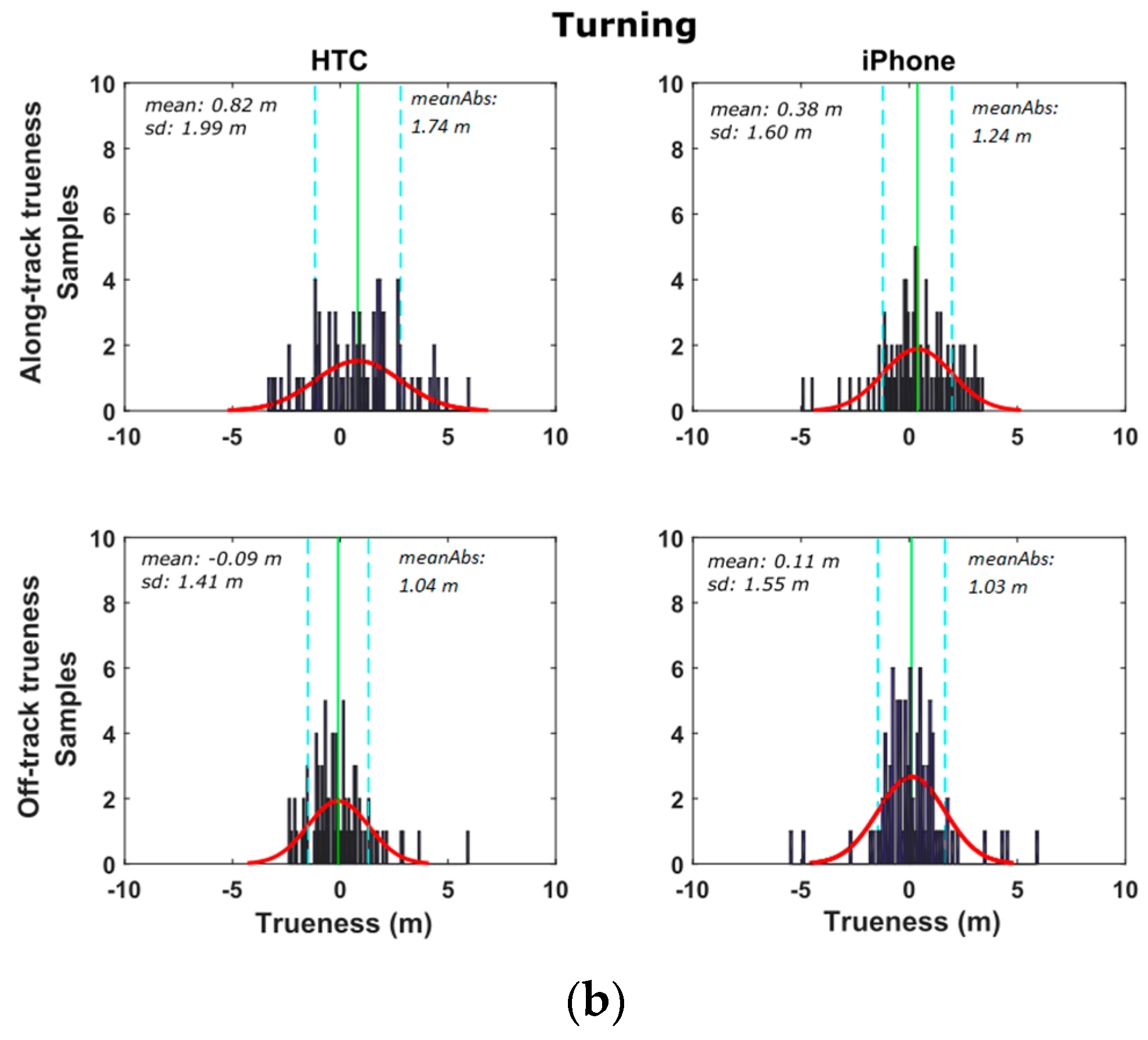
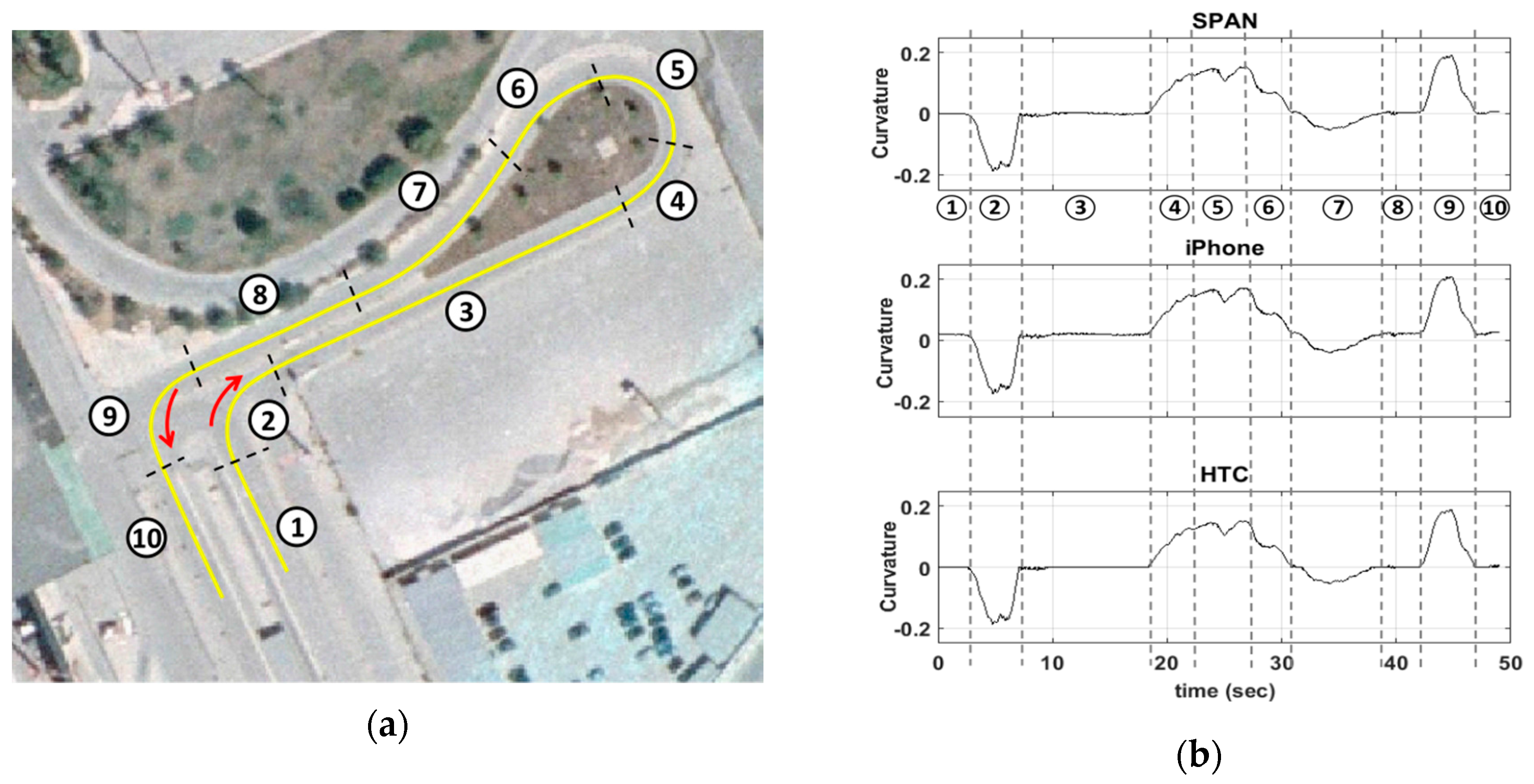
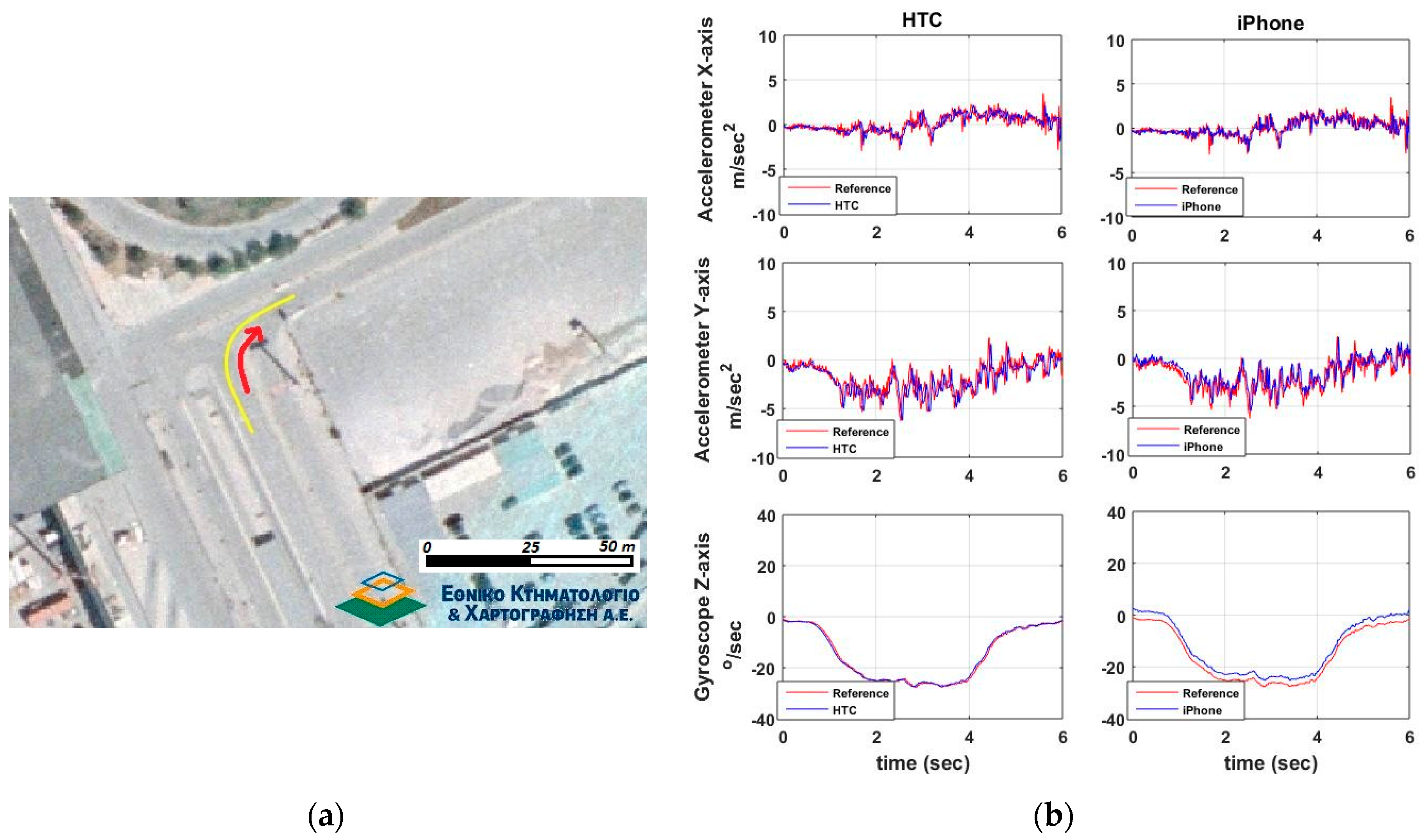
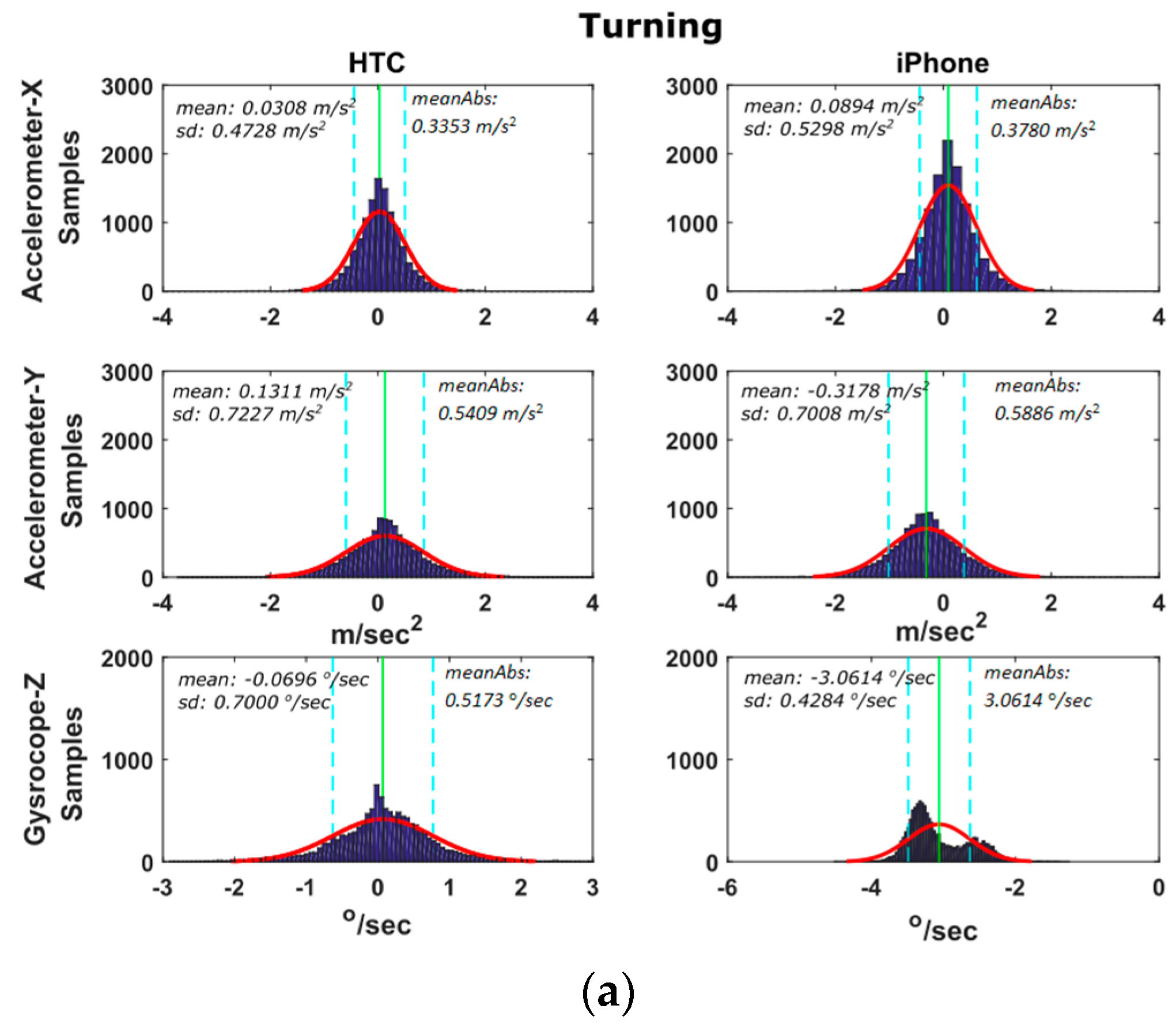
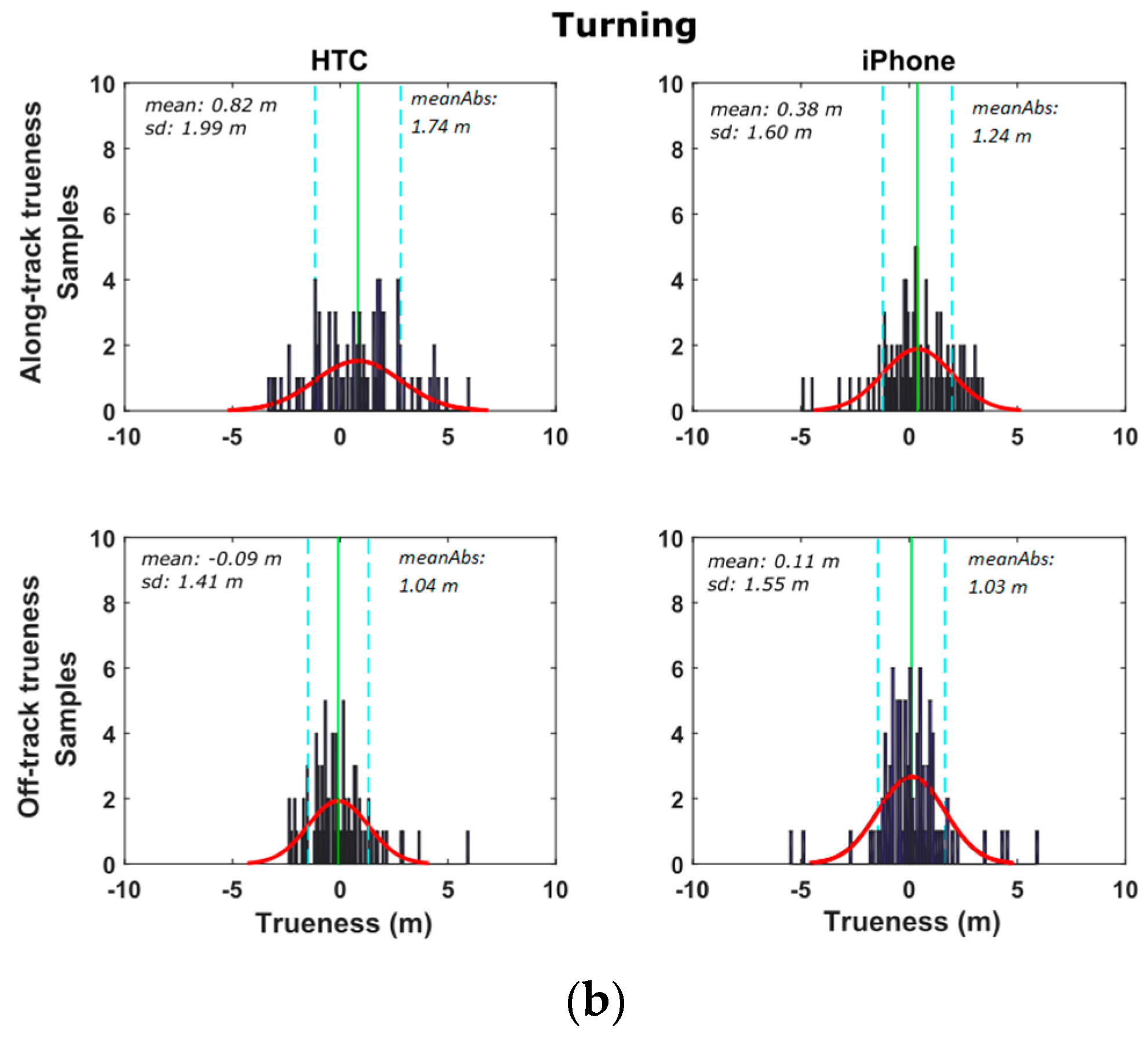
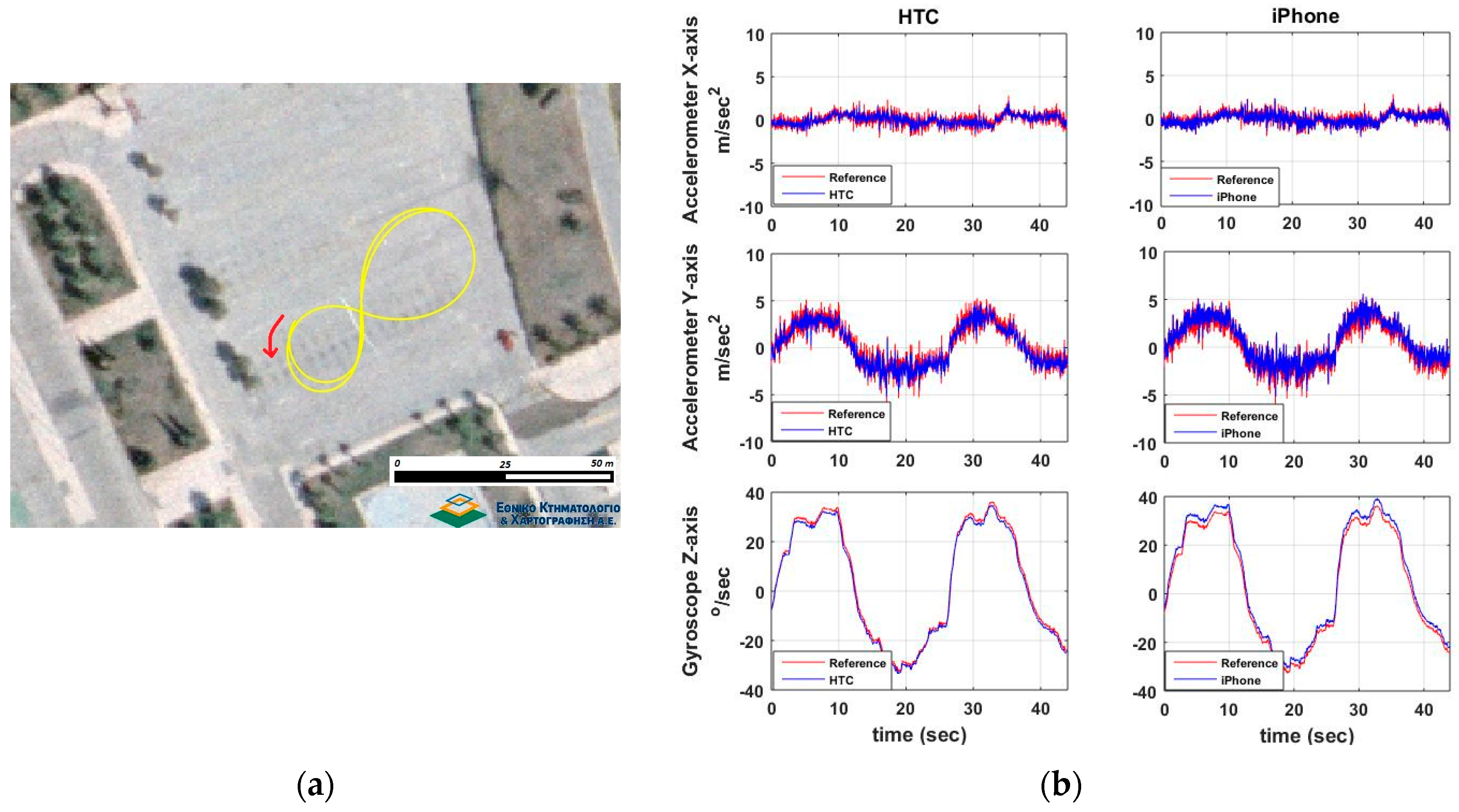
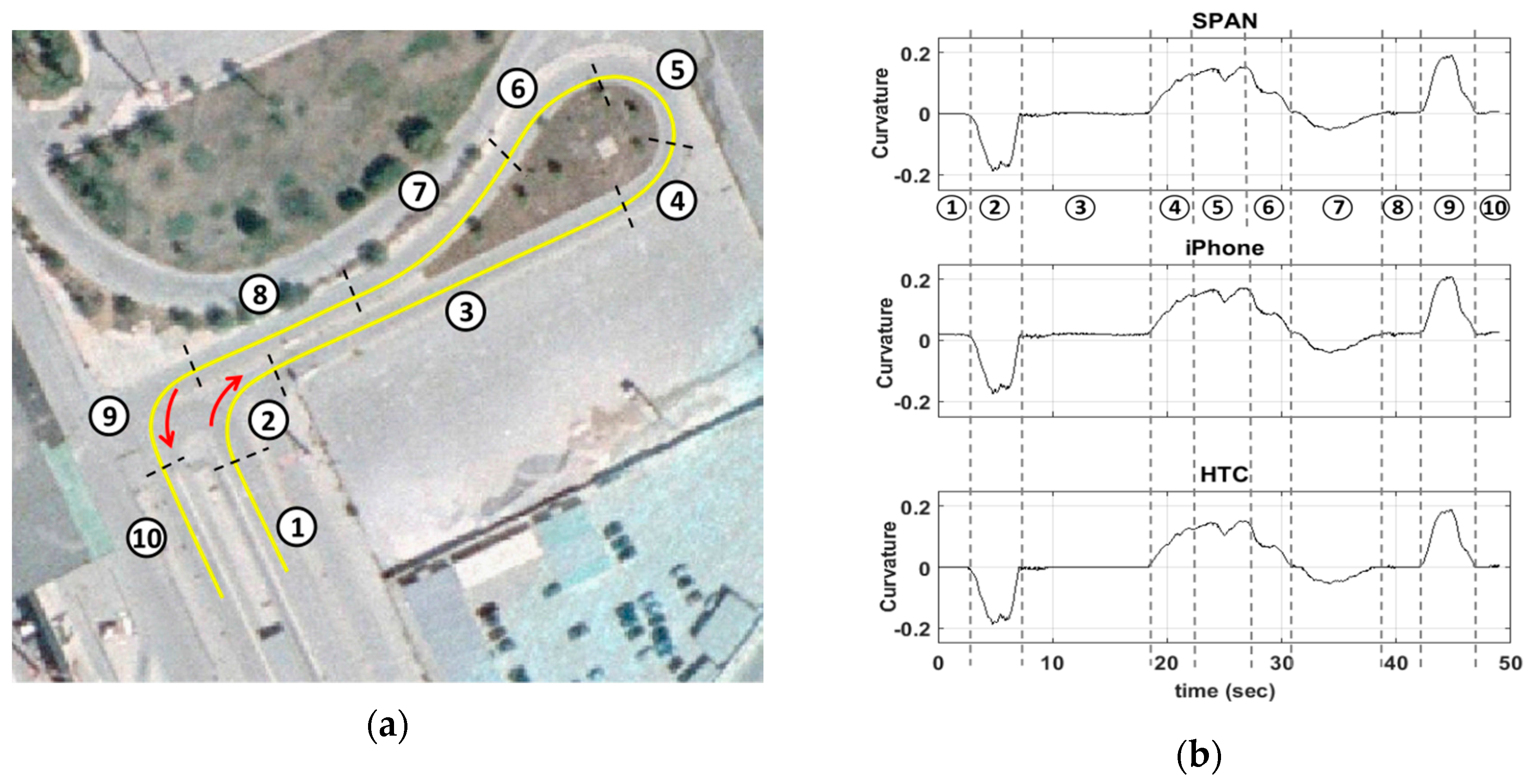
6.2.2. Turning Maneuvers
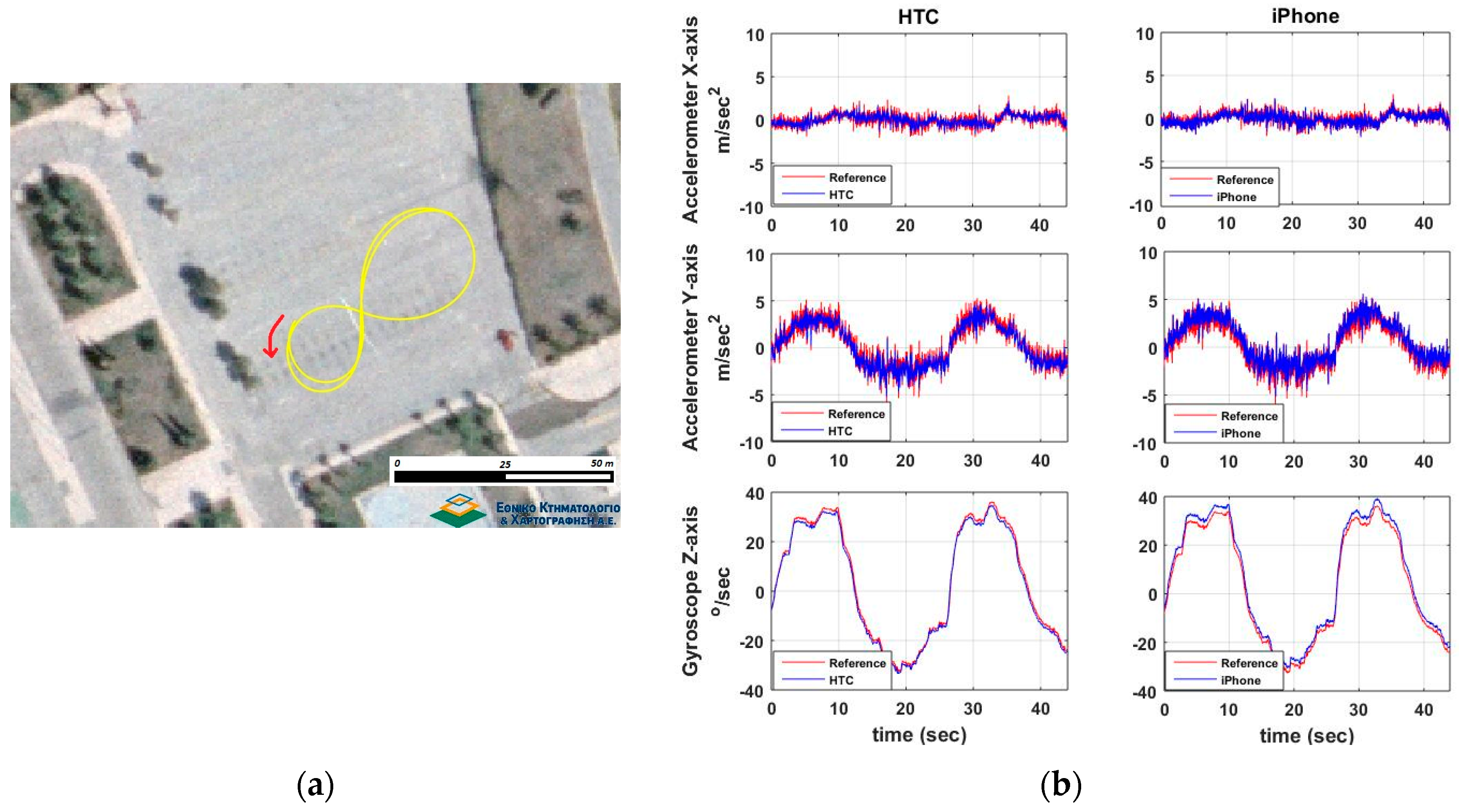
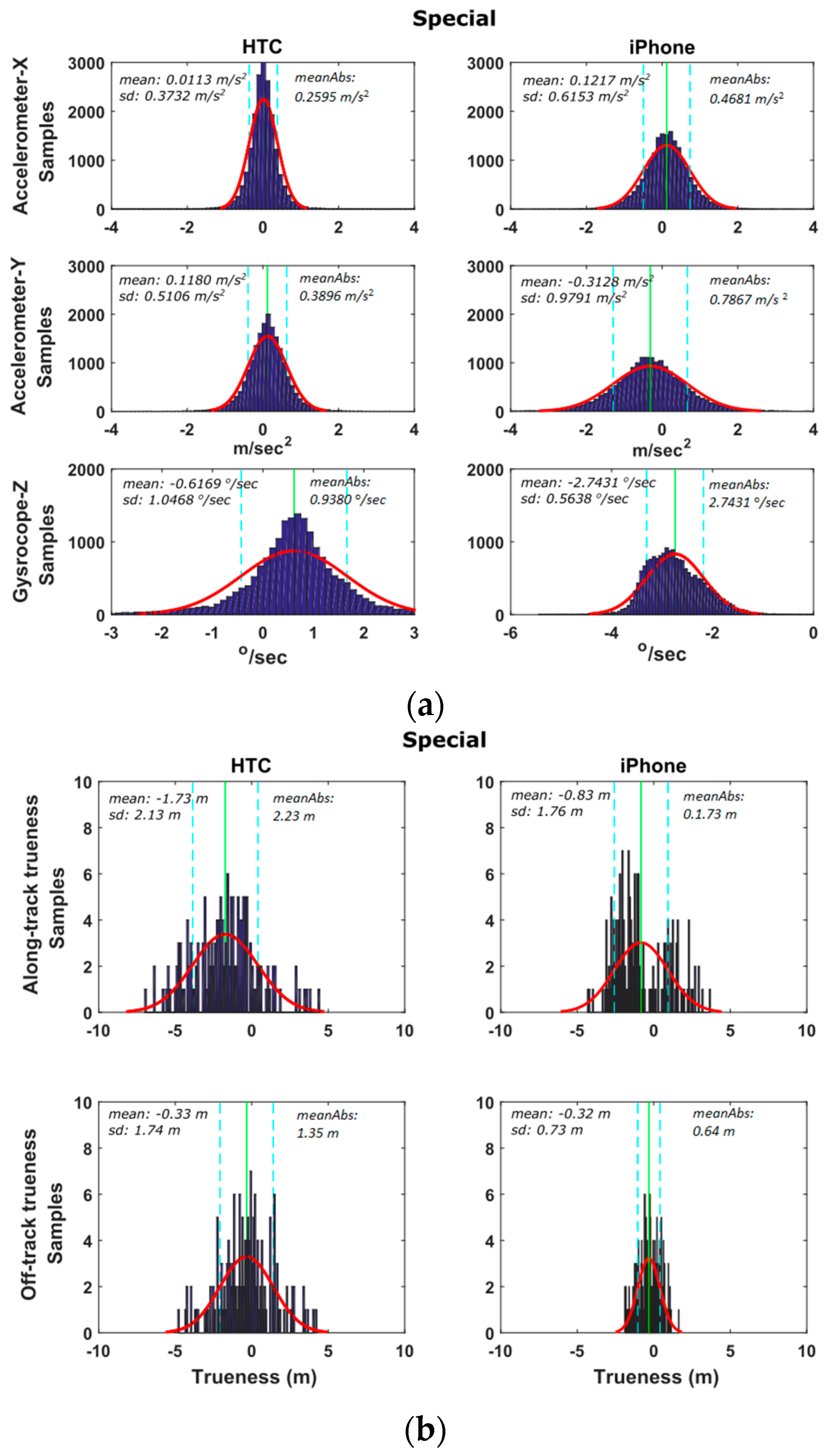
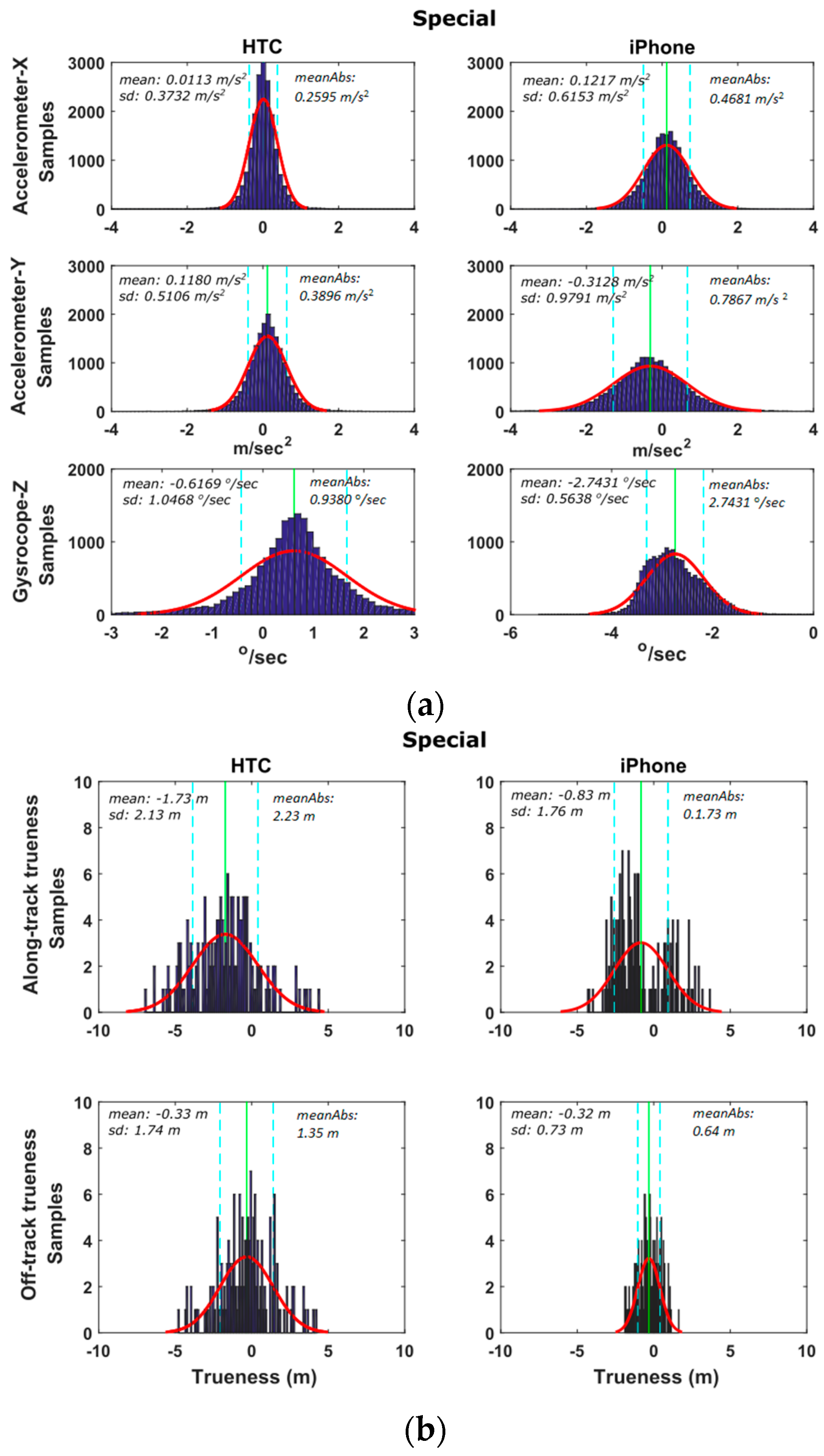
6.2.3. Special Maneuvers
7. The Role of Smartphones as a Driver for ITS Services
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Poushter, J. Smartphone Ownership and Internet Usage Continues to Climb in Emerging Economies. Pew Res. Cent. 2016, 45. Available online: http://pewrsr.ch/1Q5e2Yw (accessed on 20 May 2016). [Google Scholar]
- Saeedi, S.; Moussa, A.; El-Sheimy, N. Context-aware personal navigation using embedded sensor fusion in smartphones. Sensors 2014, 14, 5742–5767. [Google Scholar] [CrossRef]
- Masiero, A.; Guarnieri, A.; Pirotti, F.; Vettore, A. A Particle Filter for Smartphone-Based Indoor Pedestrian Navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, Smartphone Sensors and Landmarks Using the Kalman Filter for Indoor Localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Meng, X.; Wang, Y.; Zhang, Y.; Tian, P.; Yang, H. Integrated WiFi/PDR/Smartphone Using an Unscented Kalman Filter Algorithm for 3D Indoor Localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef] [PubMed]
- Antoniou, C.; Gikas, V.; Papathanasopoulou, V.; Mpimis, T.; Markou, I.; Perakis, H. Towards distribution-based calibration for traffic simulation. In Proceedings of 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014.
- Herrera, J.C.; Work, D.B.; Herring, R.; Ban, X.; Jacobson, Q.; Bayen, A. Evaluation of traffic data obtained via GPS-enabled mobile phones: The Mobile Century field experiment. Transp. Res. Part C 2010, 18, 568–583. [Google Scholar] [CrossRef]
- Chen, W.J.; Chen, C.H.; Lin, B.Y.; Lo, C.C. A traffic information prediction system based on global position system-equipped probe car reporting. Adv. Sci. Lett. 2012, 16, 117–124. [Google Scholar] [CrossRef]
- Bierlaire, M.; Chen, J.; Newman, J. Modeling Route Choice Behavior from Smartphone GPS Data; Report TRANSP-OR 101016; Transport and Mobility Laboratory, Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 16 October 2010. [Google Scholar]
- Wang, B. Application of Smartphone for Intersection Performance Measurement. Master’s Thesis, University of Akron, Ohio, OH, USA, December 2011. [Google Scholar]
- Antoniou, C.; Gikas, V.; Papathanasopoulou, V.; Danezis, C.; Panagopoulos, A.; Markou, I.; Perakis, H.; Efthymiou, D.; Yannis, G. Localization and driving behavior classification using smartphone sensors in the direct absence of GNSS. Transp. Res. Rec. J. Transp. Res. Board 2015, 2489, 66–76. [Google Scholar] [CrossRef]
- Perakis, H.; Mpimis, A.; Gikas, V.; Papathanasopoulou, V.; Antoniou, K. Driving Behavior Classification within Indoor Parking Facilities Based on Inertial Smartphone Data. In Proceedings of the 6th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015.
- Zhou, X.; Wang, W.; Yu, L. Traffic flow analysis and prediction based on GPS data of floating cars. Electr. Eng. 2013, 210, 497–508. [Google Scholar]
- Guido, G.; Galleli, V.; Saccomanno, F.; Vitale, A.; Rogano, D.; Festa, D. Treating uncertainty in the estimation of speed from smartphone probes. Transp. Res. Part C 2014, 47, 100–112. [Google Scholar] [CrossRef]
- Dickinson, J.E.; Ghali, K.; Cherrett, T.; Speed, C.; Davies, N.; Norgate, S. Tourism and the smartphone APP: Capabilities, emerging practice and scope in the travel domain. Curr. Issues Tour. 2012, 17. [Google Scholar] [CrossRef]
- Kos, A.; Tomažič, S.; Ume, A. Evaluation of Smartphone Inertial Sensor Performance for Cross-Platform Mobile Applications. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Semanjski, I.; Gautama, S. Smart City Mobility Application—Gradient Boosting Trees for Mobility Prediction and Analysis Based on Crowdsourced Data. Sensors 2015, 15, 15974–15987. [Google Scholar] [CrossRef] [PubMed]
- Alam, K.M.; Saini, M.; El Saddik, A.E. Workload Model Based Dynamic Adaptation of Social Internet of Vehicles. Sensors 2015, 15, 23262–23285. [Google Scholar] [CrossRef] [PubMed]
- Zandbergen, P. Accuracy of iPhone locations: A comparison of assisted GPS, WiFi and cellular positioning. Trans. GIS 2009, 13, 5–26. [Google Scholar] [CrossRef]
- Watzdorf, S.V.; Michahelles, F. Accuracy of positioning data on smartphones. In Proceedings of the 3rd International Workshop on Location and the Web, Tokyo, Japan, December 2010.
- Jones, T.W.; Marzen, L.; Chappelka, A. Horizontal Accuracy Assessment of Global Positioning System Data from Common Smartphones. Pap. Appl. Geogr. 2015, 1, 59–64. [Google Scholar] [CrossRef]
- Wang, L.; Groves, P.D.; Ziebart, M.K. Smartphone Shadow Matching for Better Cross-street GNSS Positioning in Urban Environments. J. Navig. 2014, 68, 411–433. [Google Scholar] [CrossRef]
- De Frutos, S.H.; Castro, M. Using smartphones as a very low-cost tool for road inventories. Transp. Res. Part C 2014, 38, 136–145. [Google Scholar] [CrossRef]
- Lee, D.; Kim, I.; Hahn, M. Trajectory-based road-geometry and crash-risk estimation with smartphone-assisted sensor networks. Int. J. Distrib. Sens. Netw. 2014, 2014. [Google Scholar] [CrossRef]
- Menard, T.; Miller, J.; Nowak, M.; Norris, D. Comparing the GPS capabilities of the Samsung galaxys, Motorola droidx, and the apple iPhone for vehicle tracking using FreeSim_Mobile. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 985–990.
- Mok, E.; Retscher, G.; Wen, C. Initial Test on the Use of GPS and Sensor Data of Modern Smartphones for Vehicle Tracking in Dense High Rise Environments. In Proceedings of the 2012 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Helsinki, Finland, 3–4 October 2012; pp. 1–7.
- Dabove, P. What are the actual performances of GNSS positioning using smartphone technology? Inside GNSS 2014, 2014, 35–37. [Google Scholar]
- Kim, Y.; Chon, Y.; Cha, H. Smartphone-based collaborative and autonomous radio fingerprinting. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 112–122. [Google Scholar] [CrossRef]
- Chen, R. Ubiquitous Positioning and Mobile Location-Based Services in SmartPhones; IGI Global: Hershey, PA, USA, 2012. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, ETH Zurich, Zurich, Switzerland, February 2012. [Google Scholar]
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI’16), Santa Clara, CA, USA, 16–18 March 2016.
- Kirkko-Jaakkola, M.; Feng, S.; Xue, Y.; Zhang, X.; Honkala, S.; Söderholm, S.; Ruotsalainen, L.; Ochieng, W.; Kuusniemi, H. Effect of Antenna Location on GNSS Positioning for ITS Applications. In Proceedings of the European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016.
- Weston, N.; Schwieger, V. Cost Effective GNSS Positioning Techniques, 2nd ed.; FIG Commission 5 Publication: Copenhagen, Denmark, 2014. [Google Scholar]
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation System, 2nd ed.; Artech House Inc.: Boston, MA, USA, 2008. [Google Scholar]
- Kealy, A.; Retscher, G.; Alam, N.; Hasnur-Rabiain, A.; Toth, C.; Grejner-Brzezinska, D.A.; Moore, T.; Hill, C.; Gikas, V.; Danezis, C.; et al. Collaborative navigation with ground vehicles and personal navigators. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012.
- Gikas, V.; Stratakos, J. A Novel Geodetic Engineering Method for Accurate and Automated Road/Railway Centerline Geometry Extraction Based on the Bearing Diagram and Fractal Behavior. IEEE Trans. Intell. Transp. Syst. 2011, 13, 115–126. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering Theory and Practice Using Matlab, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Gikas, V.; Retscher, G. An RFID-based virtual gates concept as a complementary tool for indoor vehicle localization. In Proceedings of the 6th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015.
- ISO (1994). ISO 5725-1. Accuracy (Trueness and Precision) of Measurement Methods and Results; International Organization for Standardization: Geneva, Switzerland, 1994.
- Perakis, H.; Clausen, P.; Gikas, V.; Gilliéron, P.Y.; Spyropoulou, I. Positioning Accuracy of Vehicle Trajectories for Road Applications. In Proceedings of the 22nd ITS World Congress, Bordeaux, France, 5–9 October 2015.
- International Data Corporation. Available online: www.idc.com (accessed on 20 May 2016).
- Ortiz, M.; Peyret, F.; Renaudin, V.; Betaille, D. From Lab to Road Test: Using a reference vehicle for solving GNSS localization challenges. Inside GNSS 2013, 2013, 42–60. [Google Scholar]
- Sensor Log; Version 1.7; Mobile Application Software; Bernd Thomas: Stuttgart, Germany, 2015.
- Sensor Log; Version 1.0.9; Mobile Application Software; Hfalan: Istanbul, Turkey, 2014.
- Wang, L.; Groves, P.D.; Ziebart, M.K. Multi-Constellation GNSS Performance Evaluation for Urban Canyons Using Large Virtual Reality City Models. J. Navig. 2012, 65, 459–476. [Google Scholar] [CrossRef]
- Van Bree, R.J.P.; Tiberius, C.C.J.M. Real-time single-frequency precise point positioning for cars and trains. GPS World 2016, 27, 66–72. [Google Scholar]
- ISO 16269-4: 2010. Statistical Interpretation of Data—Part 4: Detection and Treatment of Outliers; International Organization for Standardization: Geneva, Switzerland, 2010.
- Gikas, V.; Daskalakis, S. Determining Rail Track Axis Geometry Using Satellite and Terrestrial Geodetic Data. Surv. Rev. 2008, 40, 392–405. [Google Scholar] [CrossRef]
- Al-Hamad, A.; El-Sheimy, N. Smartphone Based Mobile Mapping Systems. In Proceedings of the International. Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva del Garda, Italy, 23–25 June 2014.
- Magana, V.C.; Organero, M.M. GAFU: Using a Gamification Tool to Save Fuel. IEEE Intell. Transp. Syst. Mag. 2015, 2015, 58–70. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HTC One S | iPhone 5s | |
|---|---|---|
| OS | Android 4.1.2 | iOS 7 |
| Processor | Qualcomm MSM8290 Dual-core 1.5 GHz Krait | Apple A7 + M7 motion coprocessor Dual-core 1.3 GHz Cyclone |
| GNSS receiver | A-GPS | A-GPS + GLONASS |
| Accelerometer | Panasonic EWTSAFM (3-axial) | Bosch Sensortech BMA220 (3-axial) |
| Gyroscope | Model N/A (3-axial) | STMicroelectronics B329 (3-axial) |
| iMAR IMU | ||||
| Gyroscope rate bias | <0.75°/h | |||
| Gyroscope noise | 0.1°/√h | |||
| Accelerometer bias | 1.0 mg | |||
| Novatel SPAN® (post processing) | ||||
| Position | Horizontal (RMS) | Vertical (RMS) | ||
| 0.01 m | 0.02 m | |||
| Velocity | Horizontal (RMS) | Vertical (RMS) | ||
| 0.020 m/s | 0.010 m/s | |||
| Attitude | Roll (RMS) | Pitch (RMS) | Heading (RMS) | |
| 0.004° | 0.004° | 0.013° | ||
| Vehicle Cruising | ~4500 m |
|
| Vehicle Maneuvering | speeding/stopping | Six maneuvers consisting of:
|
| turning | Fourteen maneuvers consisting of:
| |
| special | Seven maneuvers consisting of:
|
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gikas, V.; Perakis, H. Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications. Sensors 2016, 16, 1240. https://doi.org/10.3390/s16081240
Gikas V, Perakis H. Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications. Sensors. 2016; 16(8):1240. https://doi.org/10.3390/s16081240
Chicago/Turabian StyleGikas, Vassilis, and Harris Perakis. 2016. "Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications" Sensors 16, no. 8: 1240. https://doi.org/10.3390/s16081240
APA StyleGikas, V., & Perakis, H. (2016). Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications. Sensors, 16(8), 1240. https://doi.org/10.3390/s16081240