
Design of a Direction-of-Arrival Estimation Method Used for an Automatic Bearing Tracking System

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
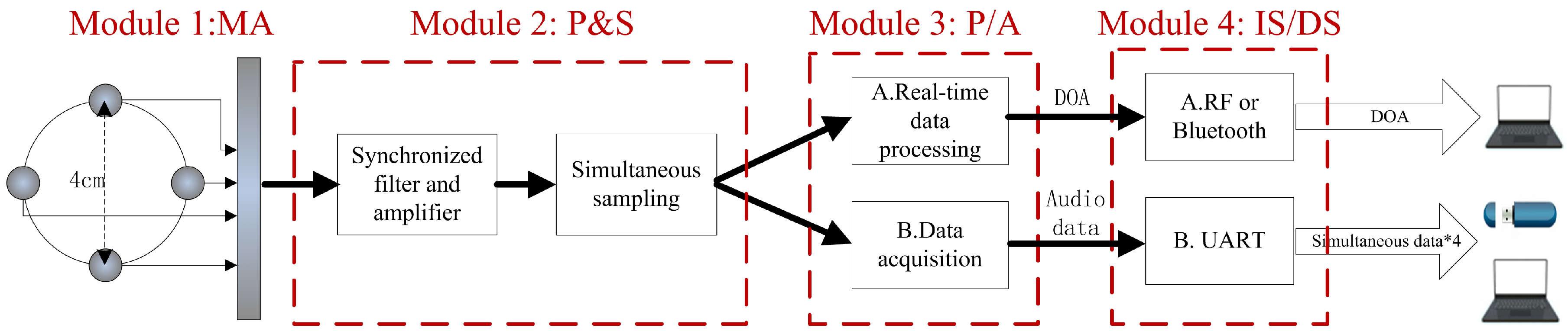
- Introduce the design of an automatic bearing tracking system with a circular MEMS microphone array.
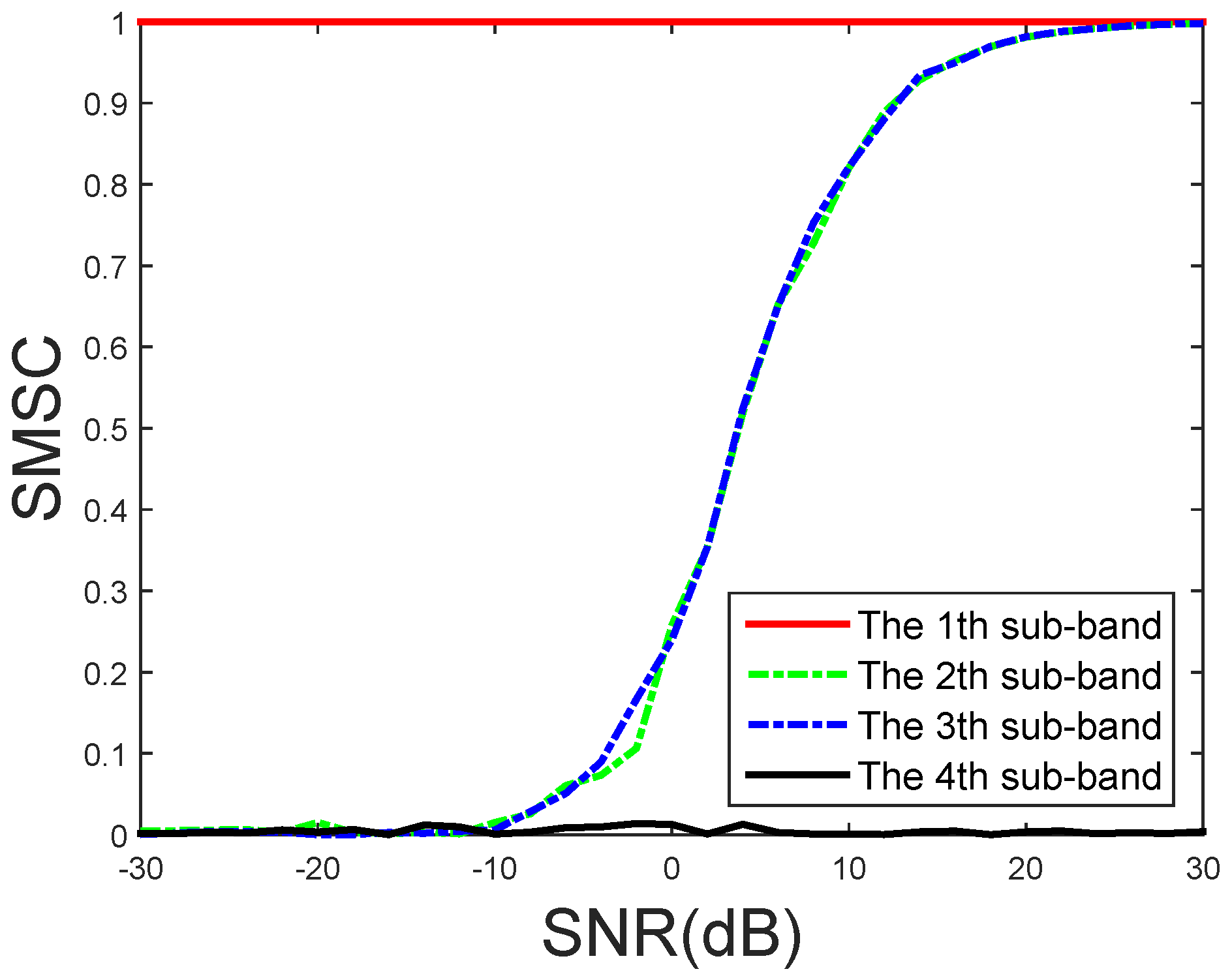
- Extend the MSC to the sub-band and propose the SMSC to measure the coherence between the frequency sub-bands of wideband signals.
- Design a sub-band DOA estimation method suitable for the bearing tracking system.
2. Sub-Band Magnitude-Squared Coherence
2.1. Definition of the SMSC
- The superscript * denotes the conjugate of the complex number.
- The text in bold denotes vectors.
- The · denotes the matrix multiplication.
- The superscript H denotes the conjugate transpose of the matrix.
- The italic denotes the expectation.
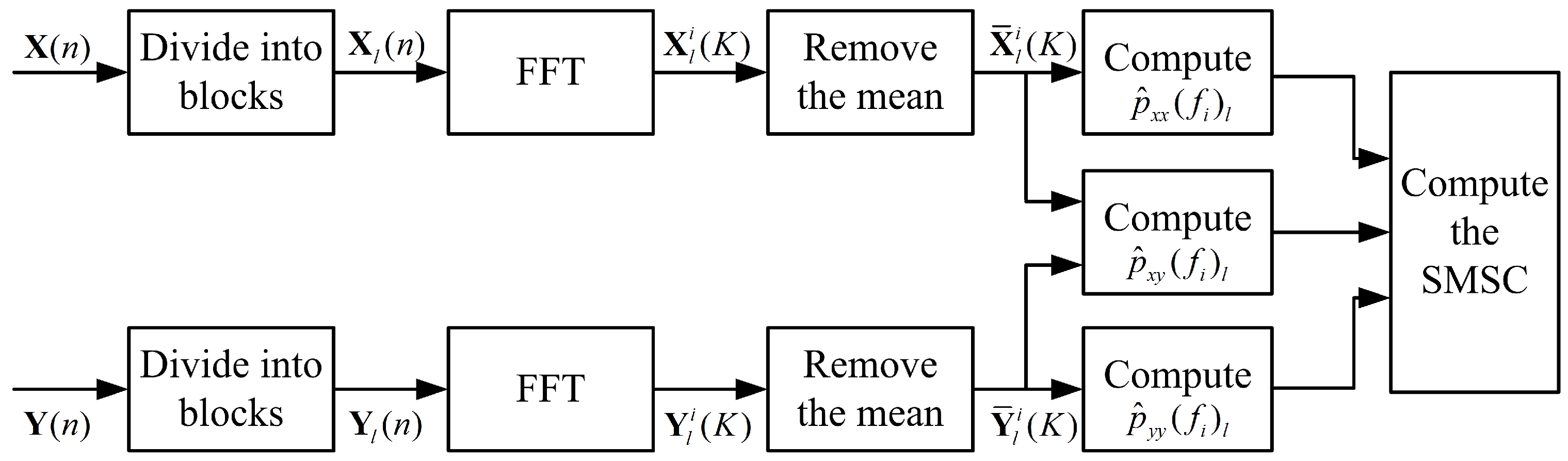
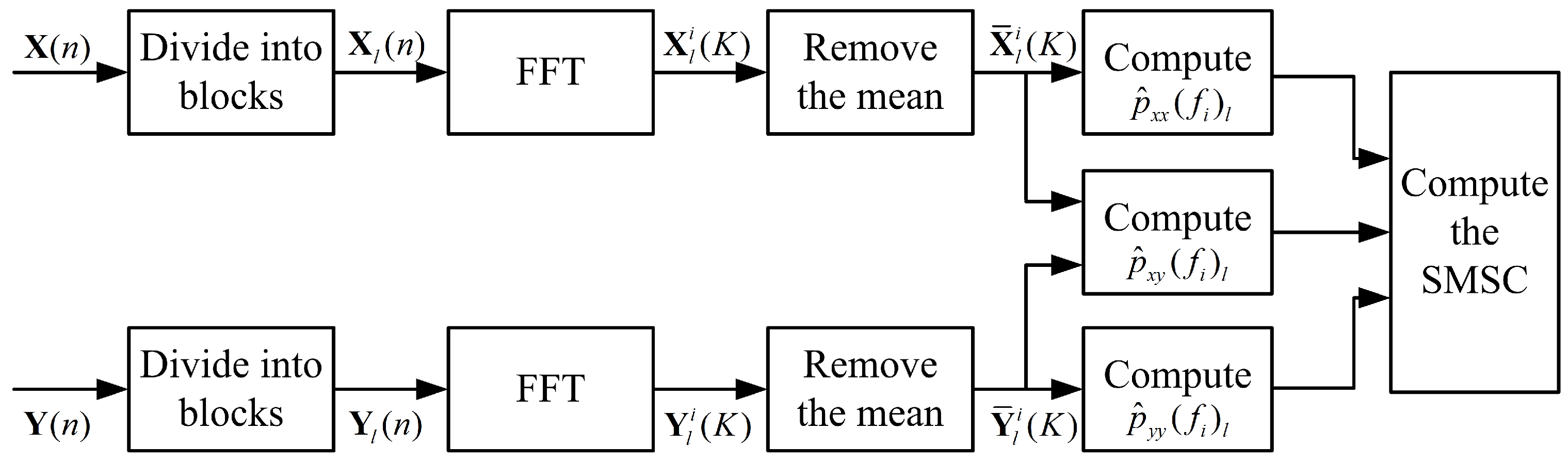
2.2. The Estimation of the SMSC
- Divide the signals and into L identical sized blocks, respectively.
- Each block is processed by FFT to get the frequency bins. Divide the frequency bins into J identical sub-bands and K is the number of frequency bins of each sub-band. If represents the frequency bins of th sub-band of the th block after removing the mean and it is a K-dimension column vector, then we have
2.3. The Wideband Methods
- Divide the received signals into L identical sized blocks to get . And then the frequency sub-band is acquired by dividing the frequency domain into J identical sub-bands after the FFT of . It is necessary to note that is an matrix. Estimate the CM of each sub-band by Equation (10).
- Select the focusing frequency (FF) and compute the focusing transformation matrix for each sub-band, where the can be the central frequency of the chosen focusing sub-band and is the solution of .
- Construct the CM at the FF through the focusing transformation.
- Apply MUSIC [10] or other DOA estimation methods to estimate the DOA by .
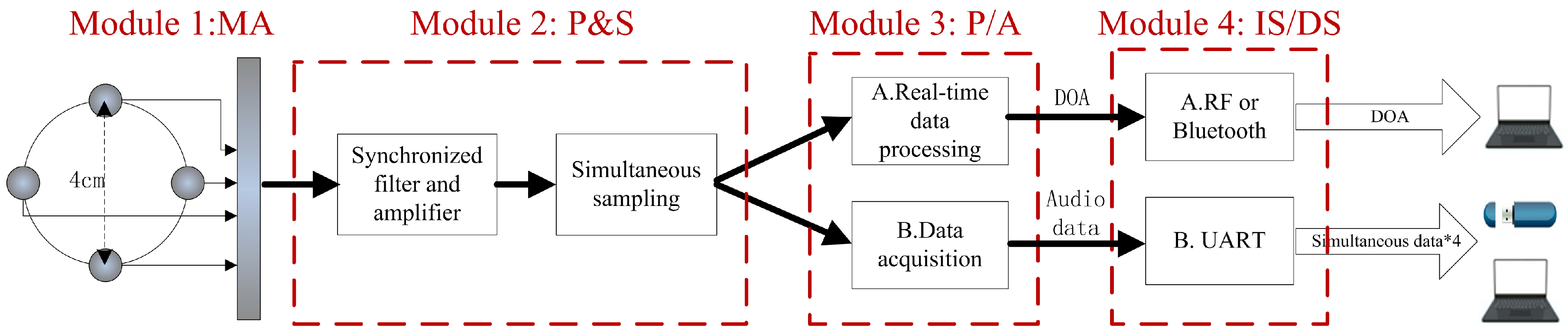
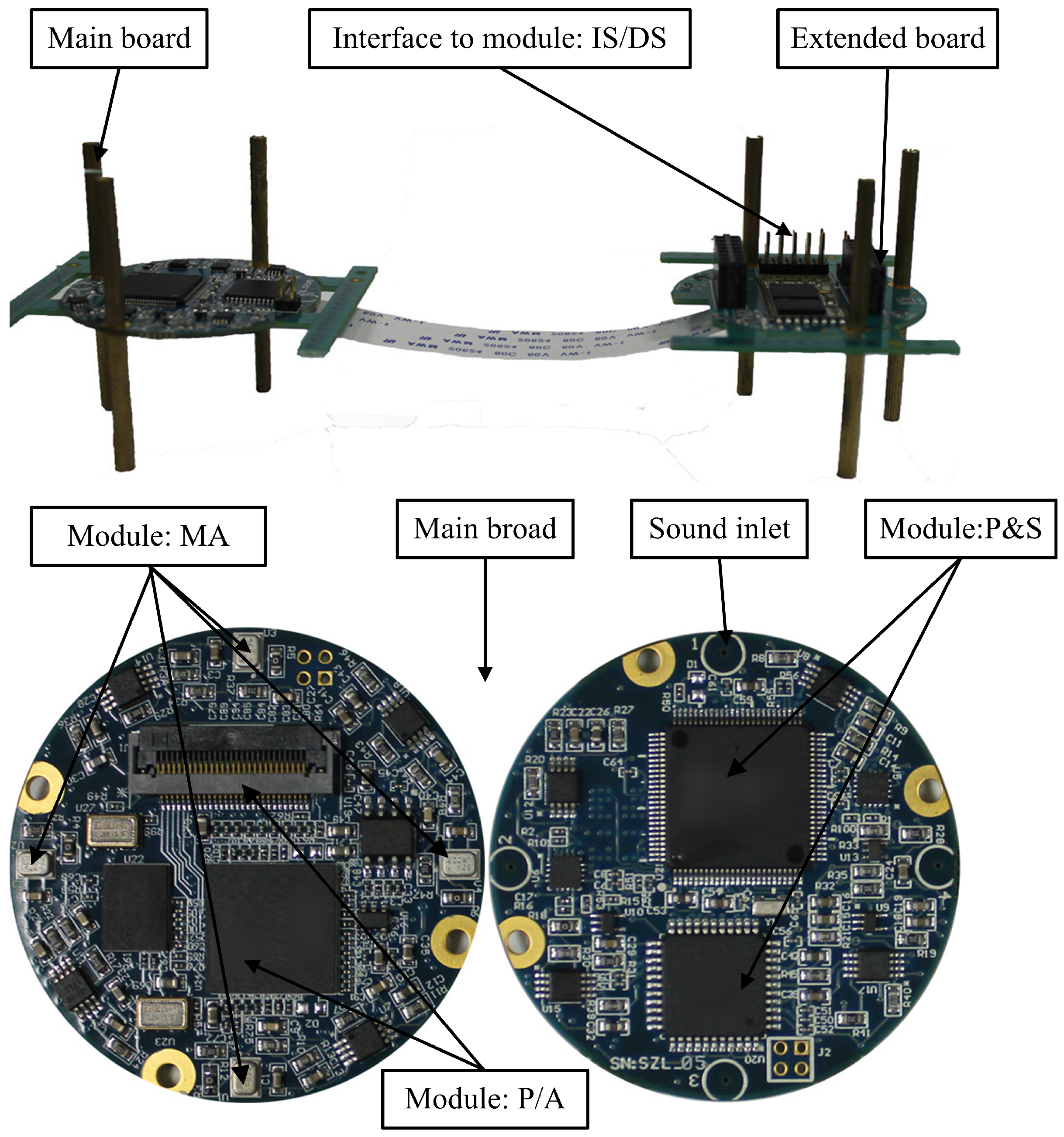
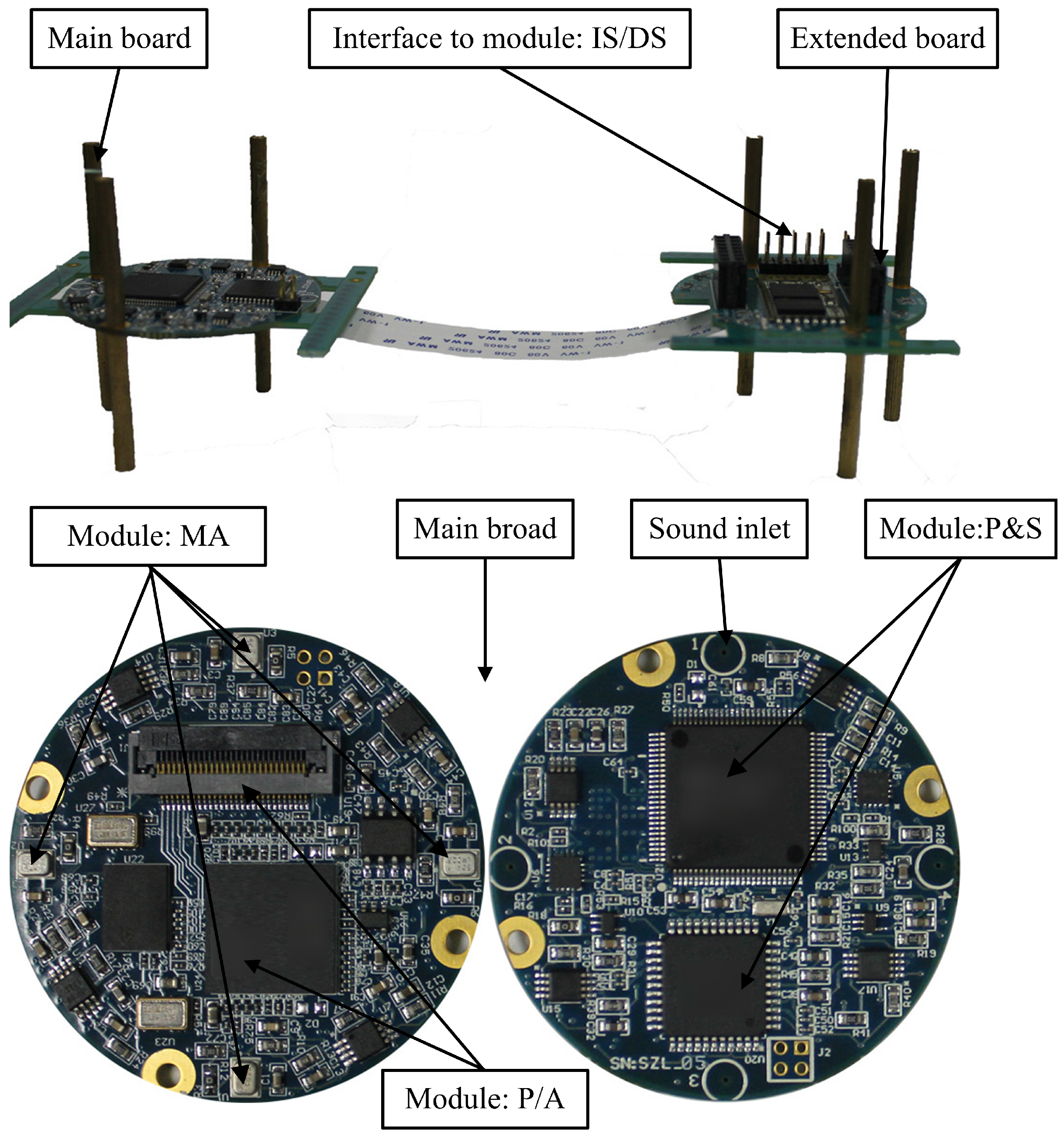
3. Design of the Bearing Tracking System
3.1. Hardware Architecture of the Bearing Tracking System
3.2. The Sub-Band DOA Estimation
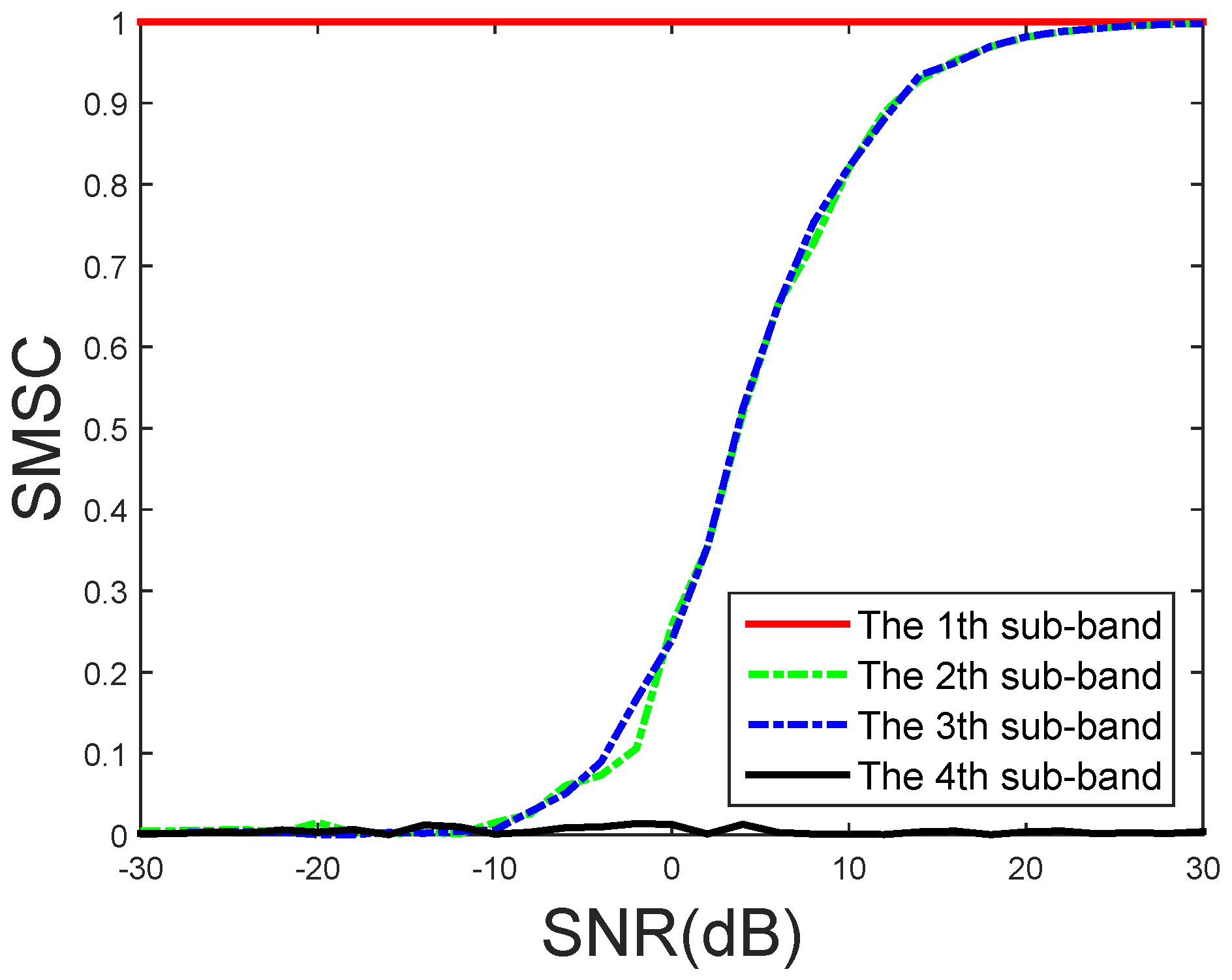
- Select the signals from any two microphones and compute the SMSCs of each frequency sub-band of the signals. Then, choose the sub-band with the largest SMSC as the DOA estimation sub-band.
- Estimate the CM of the chosen sub-band by Equation (10).
- Attain the number of acoustic emitters by , according to some signal number estimation criterion such as the MDL [34].
- Apply MUSIC or other DOA estimation methods to estimate the DOA by .
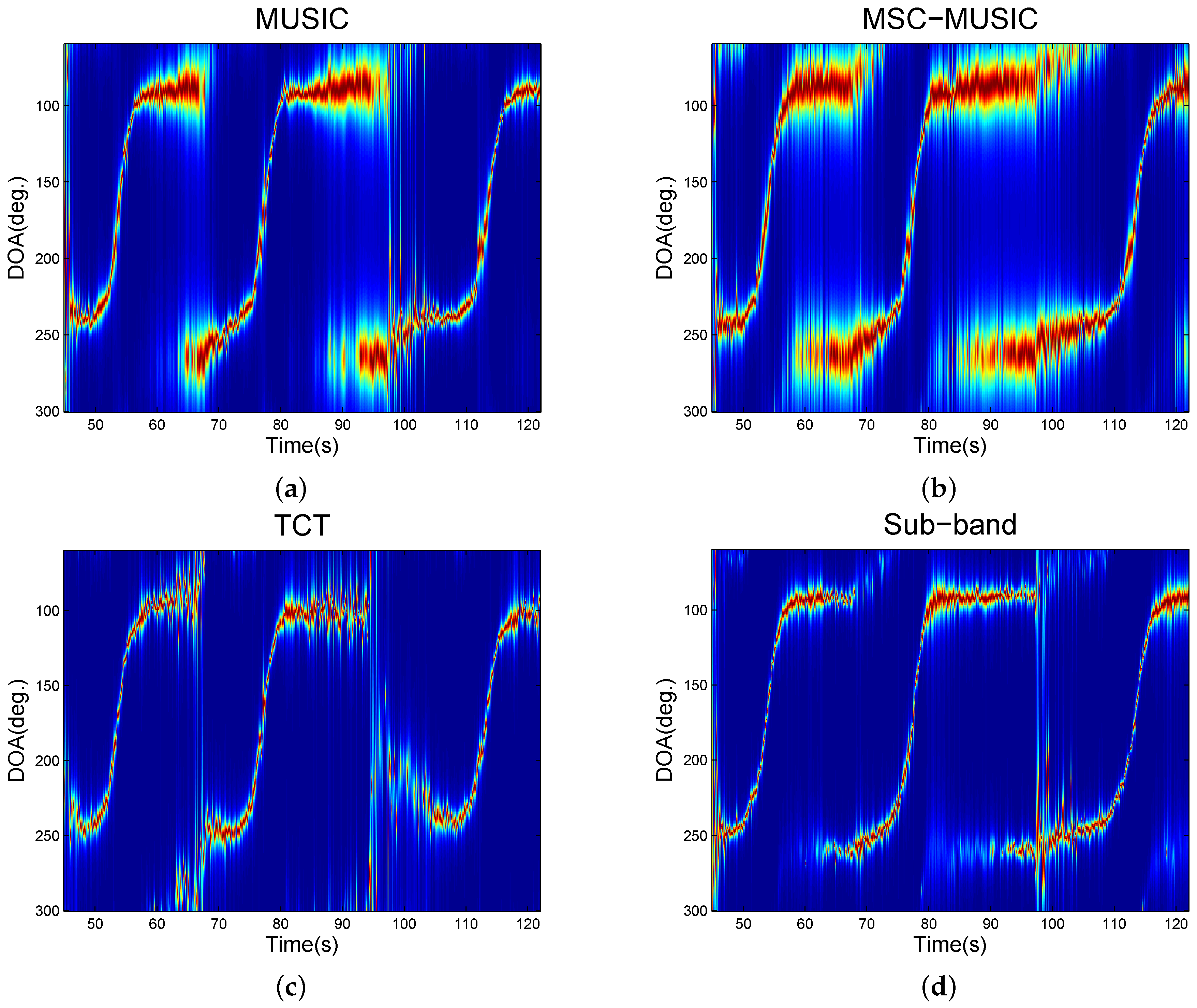
4. Simulations and Experiments
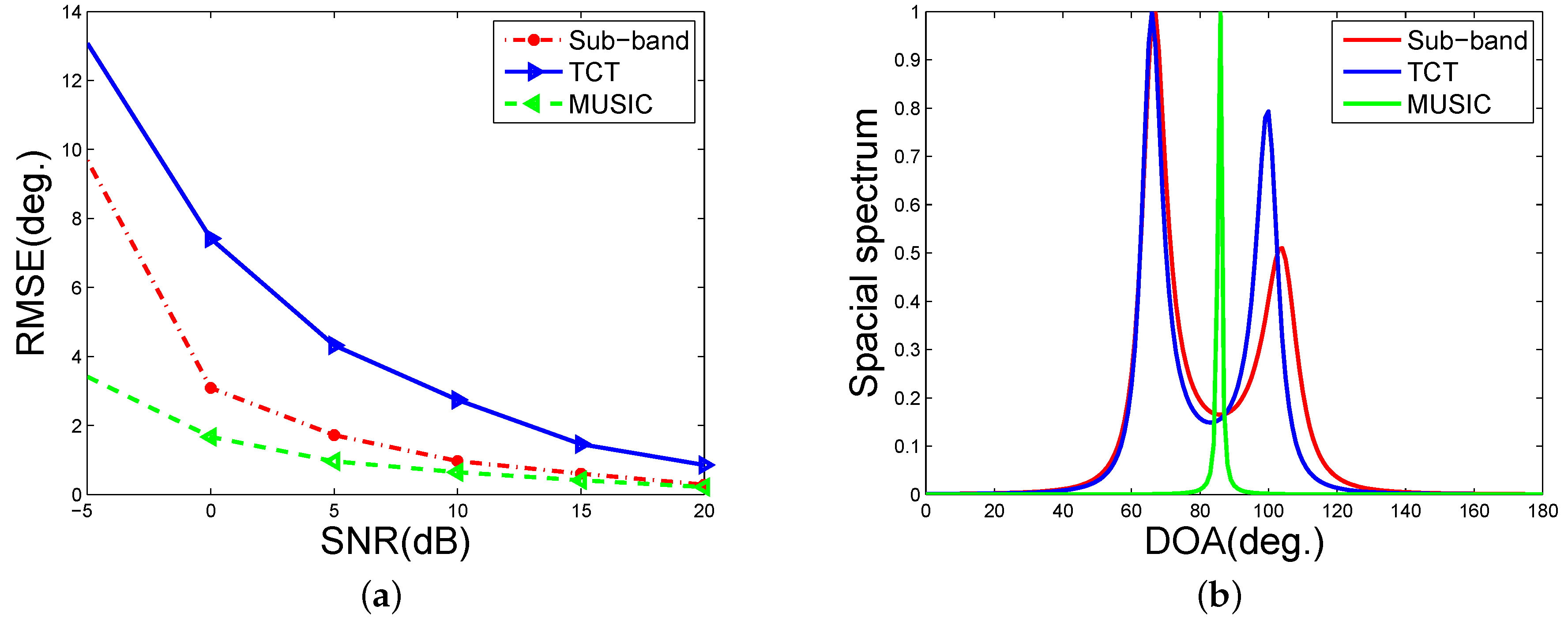
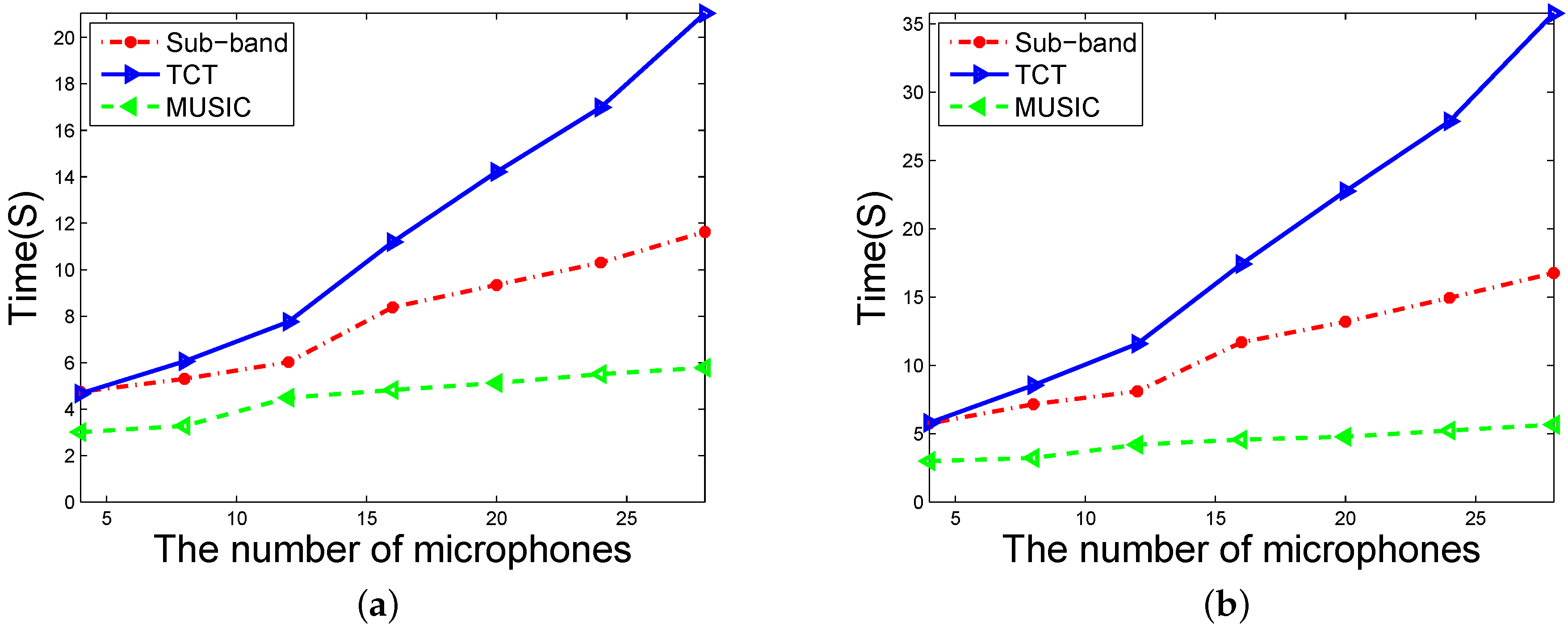
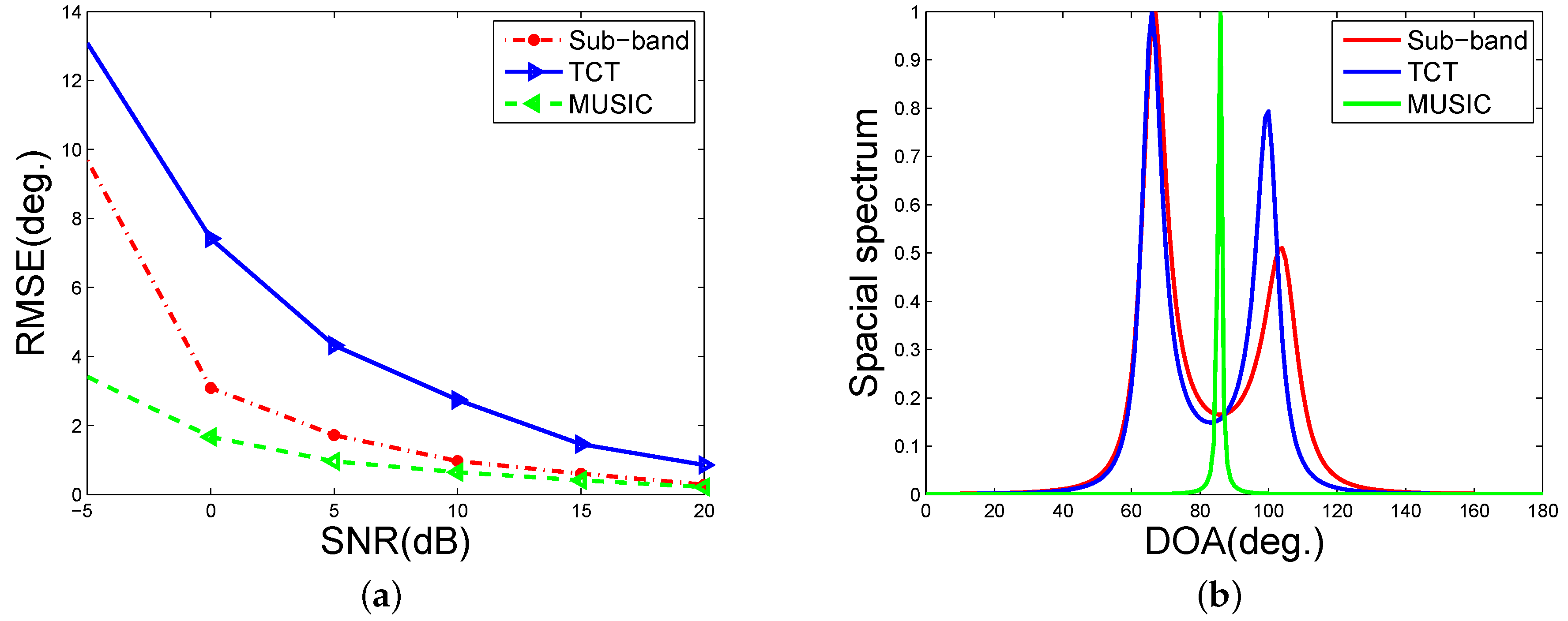
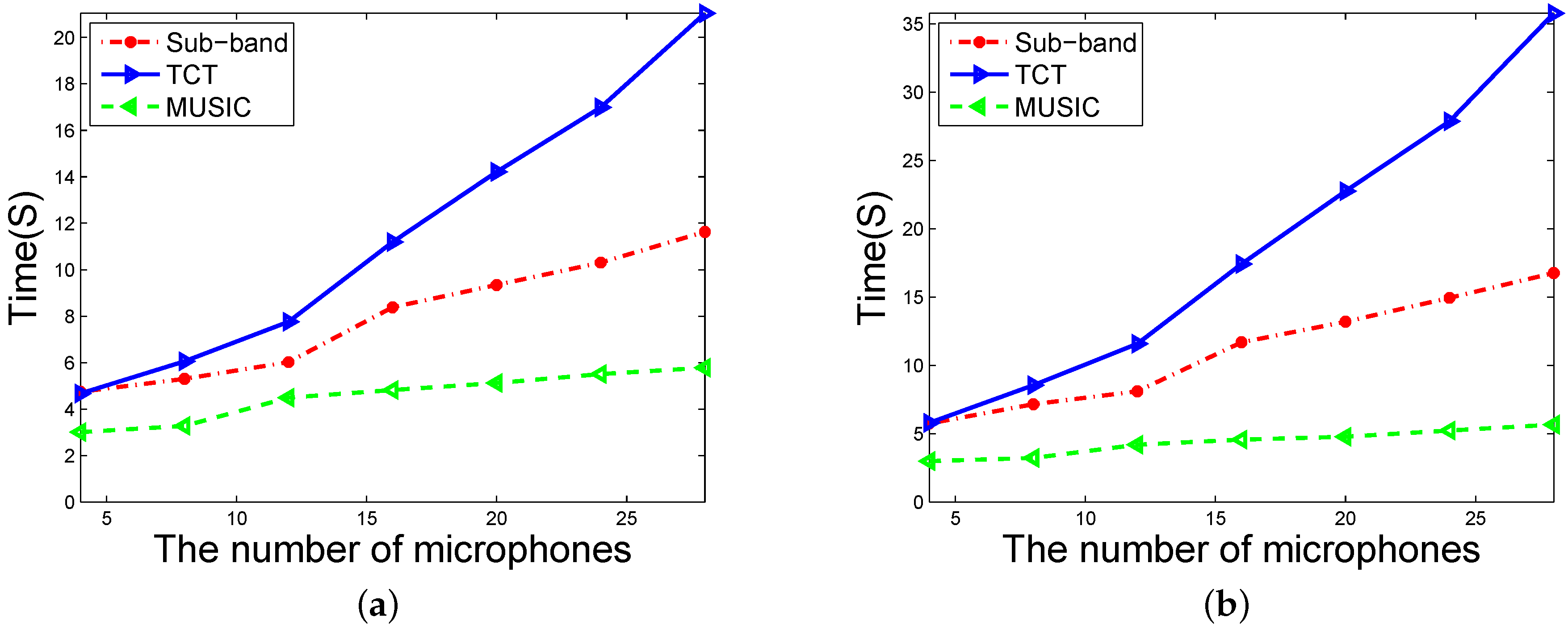
4.1. Simulations
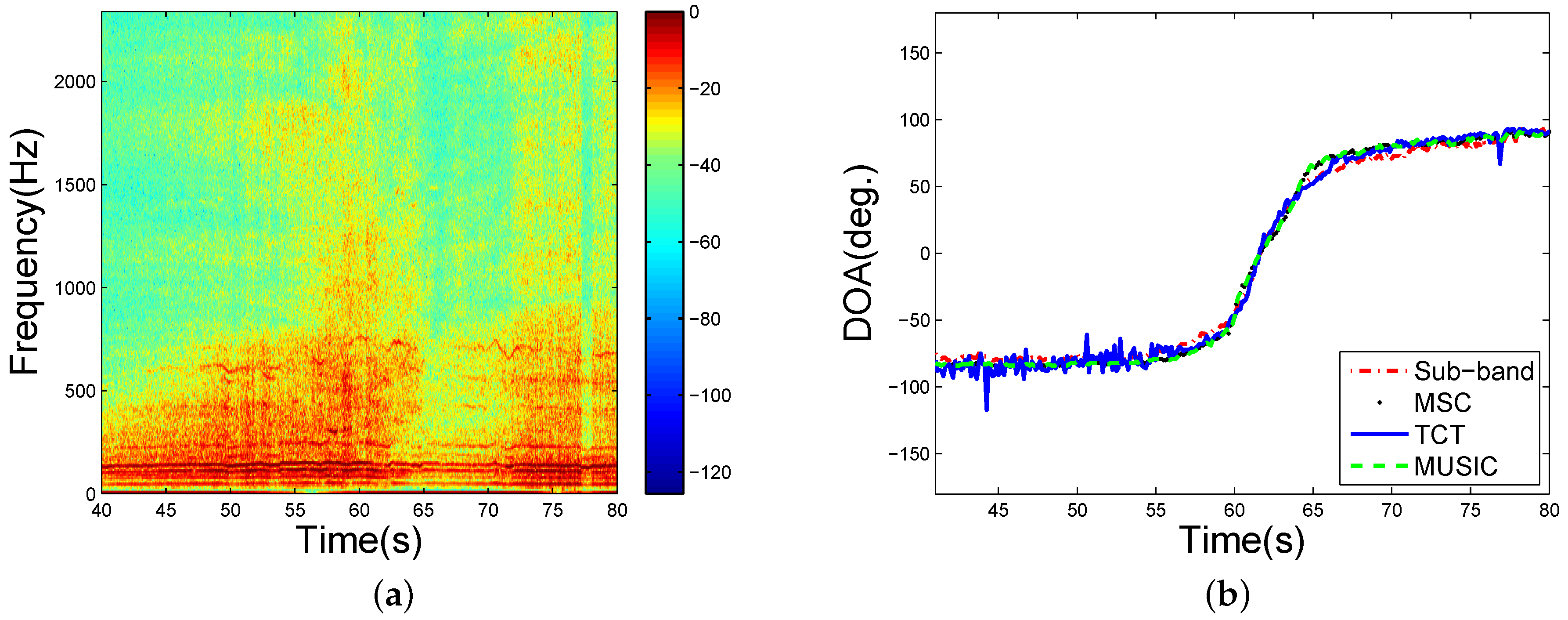
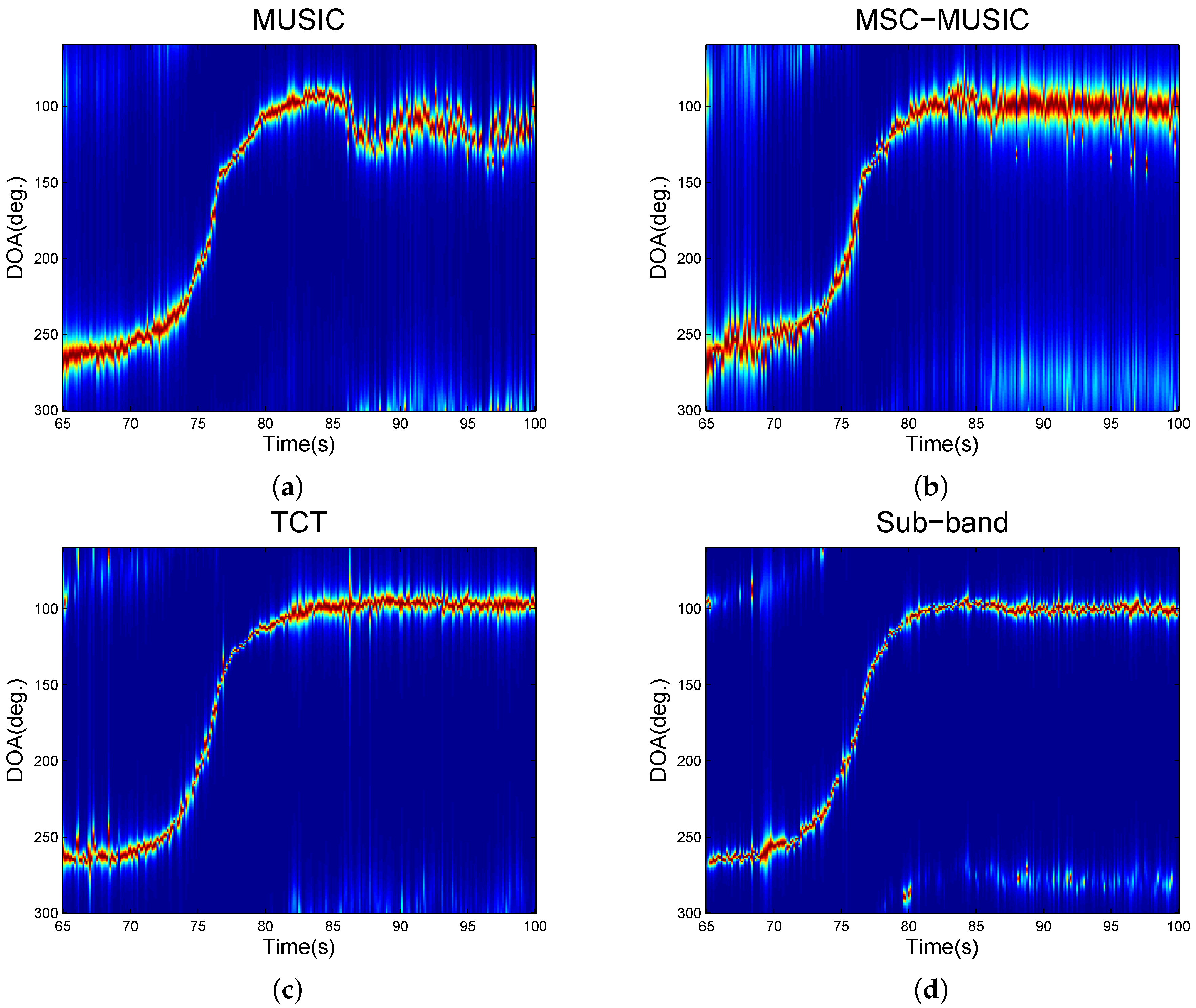
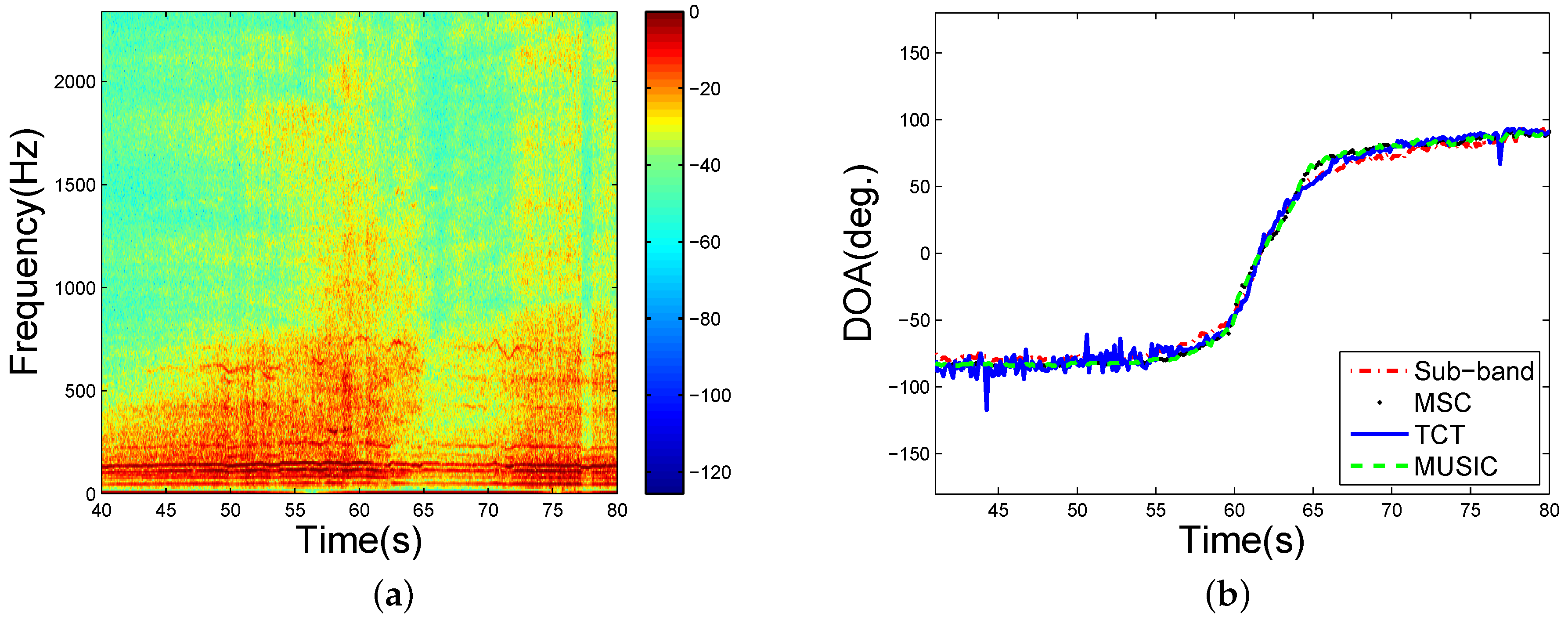
4.2. Field Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Calloway, V.; Hodges, R.; Beale, S.H.A.H.; Vehicle, D. Tracking using a network of small acoustic arrays. In Signal Processing, Sensor Fusion, and Target Recognition XIII; Kadar, I., Ed.; SPIE-Int Soc Optical Engineering: Bellingham, WA, USA, 2004; Volume 5429, pp. 117–128. [Google Scholar]
- Bajura, M.; Schott, B.; Flidr, J.; Czarnaski, J.; Worth, C.; Tho, T.; Wang, L. An integrated, modular, power-aware microsensor architecture and application to unattended acoustic vehicle tracking. In Unattended Ground Sensor Technologies and Applications VII; Carapezza, E.M., Ed.; SPIE-Int Soc Optical Engineering: Bellingham, WA, USA, 2005; Volume 5796, pp. 282–293. [Google Scholar]
- An, Y.K.; Yoo, S.M.; An, C.; Wells, B.E. Rule-based multiple-target tracking in acoustic wireless sensor networks. Comput. Commun. 2014, 51, 81–94. [Google Scholar] [CrossRef]
- Sleefe, G.E.; Ladd, M.D.; McDonald, T.S.; Elbring, G.J. Acoustic and seismic modalities for unattended ground sensors. In Unattended Ground Sensor Technologies and Applications; Carapezza, E.M., Law, D.B., Stalker, K.T., Eds.; SPIE-Int Soc Optical Engineering: Bellingham, WA, USA, 1999; Volume 3713, pp. 2–9. [Google Scholar]
- Doser, A.B.; Yee, M.L.; O’Rourke, W.T.; Slinkard, M.E.; Craft, D.C.; Nguyen, H.D. Distributed algorithms for small vehicle detection, classification and velocity estimation using unattended ground sensors. In Unattended Ground Sensor Technologies and Applications VII; Carapezza, E.M., Ed.; SPIE-Int Soc Optical Engineering: Bellingham, WA, USA, 2005; Volume 5796, pp. 374–385. [Google Scholar]
- Zhang, X.; Huang, J.C.; Song, E.L.; Liu, H.W.; Li, B.Q.; Yuan, X.B. Design of small MEMS microphone array systems for direction finding of outdoors moving vehicles. Sensors 2014, 14, 4384–4398. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.C.; Zhang, X.; Guo, F.; Zhou, Q.W.; Liu, H.W.; Li, B.Q. Design of an acoustic target classification system based on small-aperture microphone array. IEEE Trans. Instrum. Meas. 2015, 64, 2035–2043. [Google Scholar] [CrossRef]
- Guo, F.; Huang, J.C.; Zhang, X.; Cheng, Y.B.; Liu, H.W.; Li, B.Q. A two-stage detection method for moving targets in the wild based on microphone array. IEEE Sens. J. 2015, 15, 5795–5803. [Google Scholar] [CrossRef]
- Jacob, B.; Jingdong, C.; Yiteng, H. Direction-of-Arrival and Time-Difference-of-Arrival estimation. In Microphone Array Signal Processing; Springer: Heidelberg, Germany, 2008; Volume 1, pp. 181–215. [Google Scholar]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Zhou, L.; Zhao, Y.J.; Cui, H. High resolution wideband DOA estimation based on modified MUSIC algorithm. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008; pp. 20–22.
- Pham, T.; Fong, M.F. Real-Time Implementation of MUSIC for Wideband Acoustic Detection and Tracking; SPIE-Int Soc Optical Engineering: Bellingham, WA, USA, 1997; Volume 3069, pp. 250–256. [Google Scholar]
- Zhang, X.; Song, E.; Huang, J.; Liu, H.; Wang, Y.; Li, B.; Yuan, X. Acoustic source localization via subspace based method using small aperture MEMS arrays. J. Sens. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Chan, Y.; Hattin, R.; Plant, J. The least squares estimation of time delay and its use in signal detection. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 217–222. [Google Scholar] [CrossRef]
- Zhou, C.; Haber, F.; Jaggard, D. A resolution measure for the MUSIC algorithm and its application to plane wave arrivals contaminated by coherent interference. IEEE Trans. Signal Process. 1991, 39, 454–463. [Google Scholar] [CrossRef]
- Azimi-Sadjadi, M.R.; Roseveare, N.; Pezeshki, A. Wideband DOA estimation algorithms for multiple moving sources using unattended acoustic sensors. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1585–1599. [Google Scholar] [CrossRef]
- Shan, T.J.; Wax, M.; Kailath, T. On spatal smoothing for direction-of-arrival estimation of coherent signals. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 806–811. [Google Scholar] [CrossRef]
- Wang, H.; Kaveh, M. Coherent signal-subspace processing for detection and estimation of angles of arrival of multiple wideband sources. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 823–831. [Google Scholar] [CrossRef]
- Valaee, S.; Kabal, P. Wideband array processing using a two-sided correlation transformation. IEEE Trans. Singial Process. 1995, 43, 160–172. [Google Scholar] [CrossRef]
- Huang, J.C.; Zhang, X.; Zhou, Q.W.; Song, E.L.; Li, B.Q. A practical fundamental frequency extraction algorithm for motion parameters estimation of moving targets. IEEE Trans. Instrum. Meas. 2014, 63, 267–276. [Google Scholar] [CrossRef]
- Wilson, D.K.; White, M.J. Discrimination of wind noise and sound waves by their contrasting spatial and temporal properties. Acta Acust. United Acust. 2010, 96, 991–1002. [Google Scholar] [CrossRef]
- Shields, F.D. Low-frequency wind noise correlation in microphone arrays. J. Acoust. Soc. Am. 2005, 117, 3489–3496. [Google Scholar] [CrossRef] [PubMed]
- Carter, G.C.; Knapp, C.H.; Nuttall, A.H. Estimation of the magnitude-squared coherence function via overlapped fast Fourier transform processing. IEEE Trans. Audio Electroacoust. 1973, 21, 337–344. [Google Scholar] [CrossRef]
- Scharrer, R.; Vorlander, M. Sound field classification in small microphone arrays using spatial coherences. IEEE Trans. Audio Speech Lang. Process 2013, 21, 1891–1899. [Google Scholar] [CrossRef]
- Shao, Q.; Peng, R.; Zheng, C. Estimation of a generalized non-parametric magnitude squared coherence spectrum using the GLRT-based rank detection. In Proceedings of the 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 189–193.
- Santamaria, I.; Via, J. Estimation of the magnitude squared coherence spectrum based on reduced-rank canonical coordinates. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech, and Signal Processing, Honolulu, HI, USA, 15–20 April 2007; pp. 985–988.
- Xue, Y.B.; Wang, J.K.; Song, X. Application of multiresolution analysis to direction-of-arrival estimation. Int. J. Inf. Syst. Sci. 2005, 1, 120–136. [Google Scholar]
- Wang, B.H.; Wang, Y.L.; Chen, H. Spatial wavelet transform preprocessing for direction of arrival estimation. In Proceedings of the Antennas and Propagation Society International Symposium, San Antonio, TX, USA, 16–21 June 2002; pp. 672–675.
- van den Branden Lambrecht, C.; Karrakchou, M. Wavelet packets-based high-resolution spectral estimation. Signal Process. 1995, 47, 135–144. [Google Scholar] [CrossRef]
- Li, D.; Wong, K.D.; Hu, Y.H.; Sayeed, A.M. Detection, classification, and tracking of targets. IEEE Signal Process. Mag. 2002, 19, 17–29. [Google Scholar]
- Yoon, Y.S.; Kaplan, L.M.; McClellan, J.H. TOPS: New DOA estimator for wideband signals. IEEE Trans. Signal Process. 2006, 54, 1977–1989. [Google Scholar] [CrossRef]
- Cevher, V.; Chellappa, R.; McClellan, J. Vehicle speed estimation using acoustic wave patterns. IEEE Trans. Signal Process. 2009, 57, 30–47. [Google Scholar] [CrossRef]
- Zatman, M. How narrow is narrowband? IEEE Proc.-Radar Sonar Navig. 1998, 145, 85–91. [Google Scholar] [CrossRef]
- Zhao, L.C.; Krishnaiah, P.R.; Bai, Z.D. On detection of the number of signals in presence of white-noise. J. Multivar. Anal. 1986, 20, 1–25. [Google Scholar] [CrossRef]



© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, F.; Liu, H.; Huang, J.; Zhang, X.; Zu, X.; Li, B.; Yuan, X. Design of a Direction-of-Arrival Estimation Method Used for an Automatic Bearing Tracking System. Sensors 2016, 16, 1145. https://doi.org/10.3390/s16071145
Guo F, Liu H, Huang J, Zhang X, Zu X, Li B, Yuan X. Design of a Direction-of-Arrival Estimation Method Used for an Automatic Bearing Tracking System. Sensors. 2016; 16(7):1145. https://doi.org/10.3390/s16071145
Chicago/Turabian StyleGuo, Feng, Huawei Liu, Jingchang Huang, Xin Zhang, Xingshui Zu, Baoqing Li, and Xiaobing Yuan. 2016. "Design of a Direction-of-Arrival Estimation Method Used for an Automatic Bearing Tracking System" Sensors 16, no. 7: 1145. https://doi.org/10.3390/s16071145
APA StyleGuo, F., Liu, H., Huang, J., Zhang, X., Zu, X., Li, B., & Yuan, X. (2016). Design of a Direction-of-Arrival Estimation Method Used for an Automatic Bearing Tracking System. Sensors, 16(7), 1145. https://doi.org/10.3390/s16071145