
Kalman Filters in Geotechnical Monitoring of Ground Subsidence Using Data from MEMS Sensors



Abstract
:1. Introduction
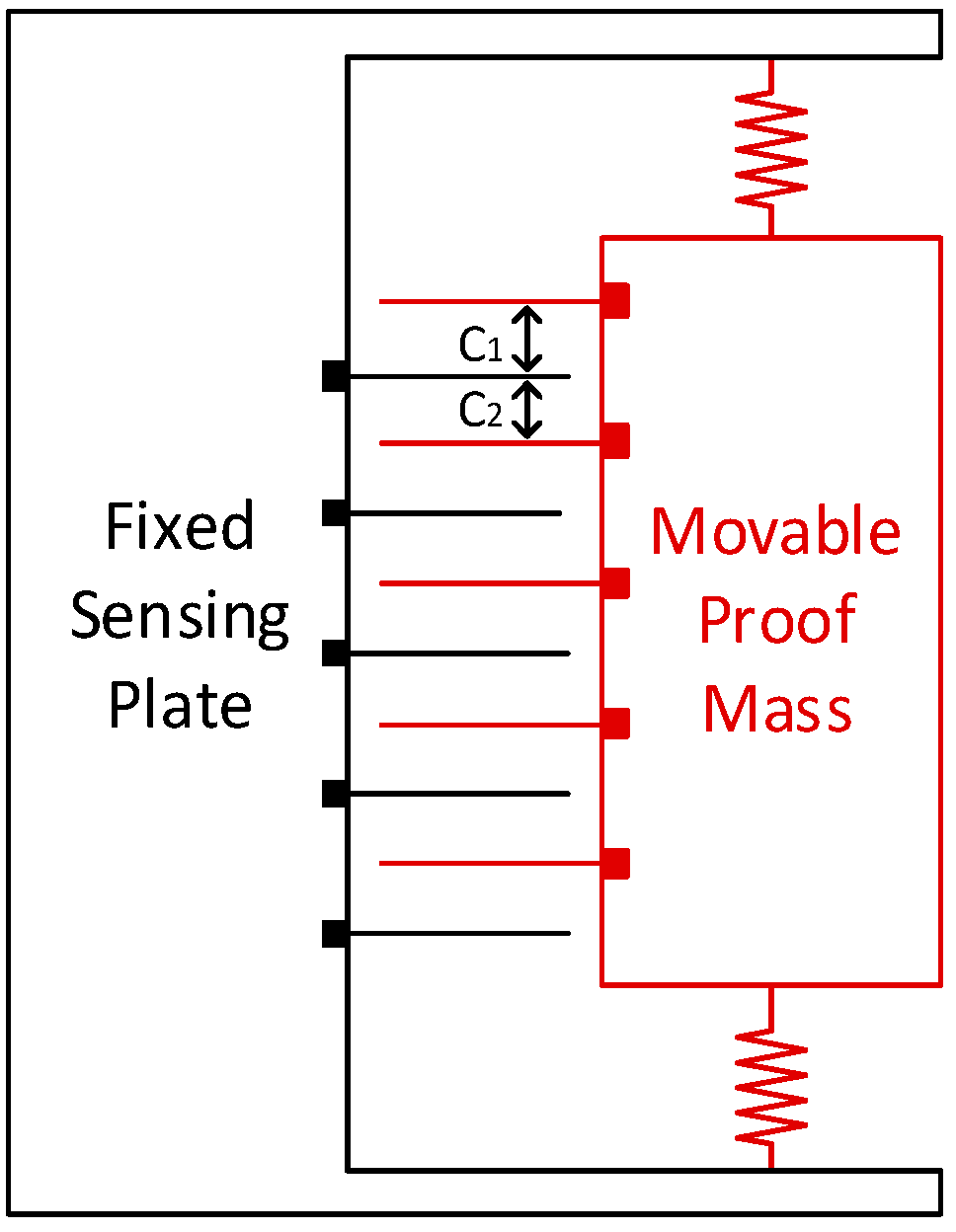
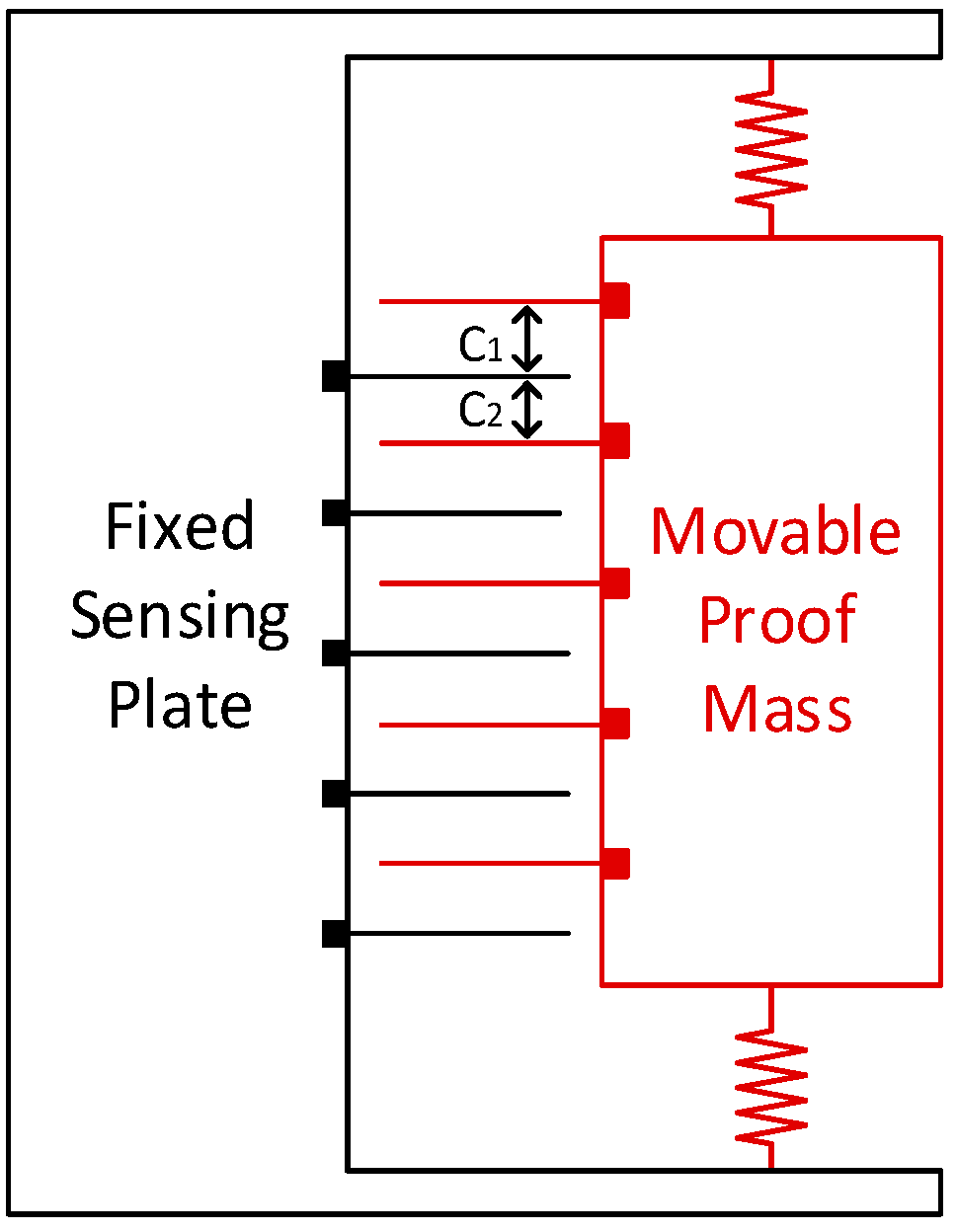
2. Applied MEMS Sensors
3. Acquiring Sensor Motion Using Inertial Navigation Algorithm
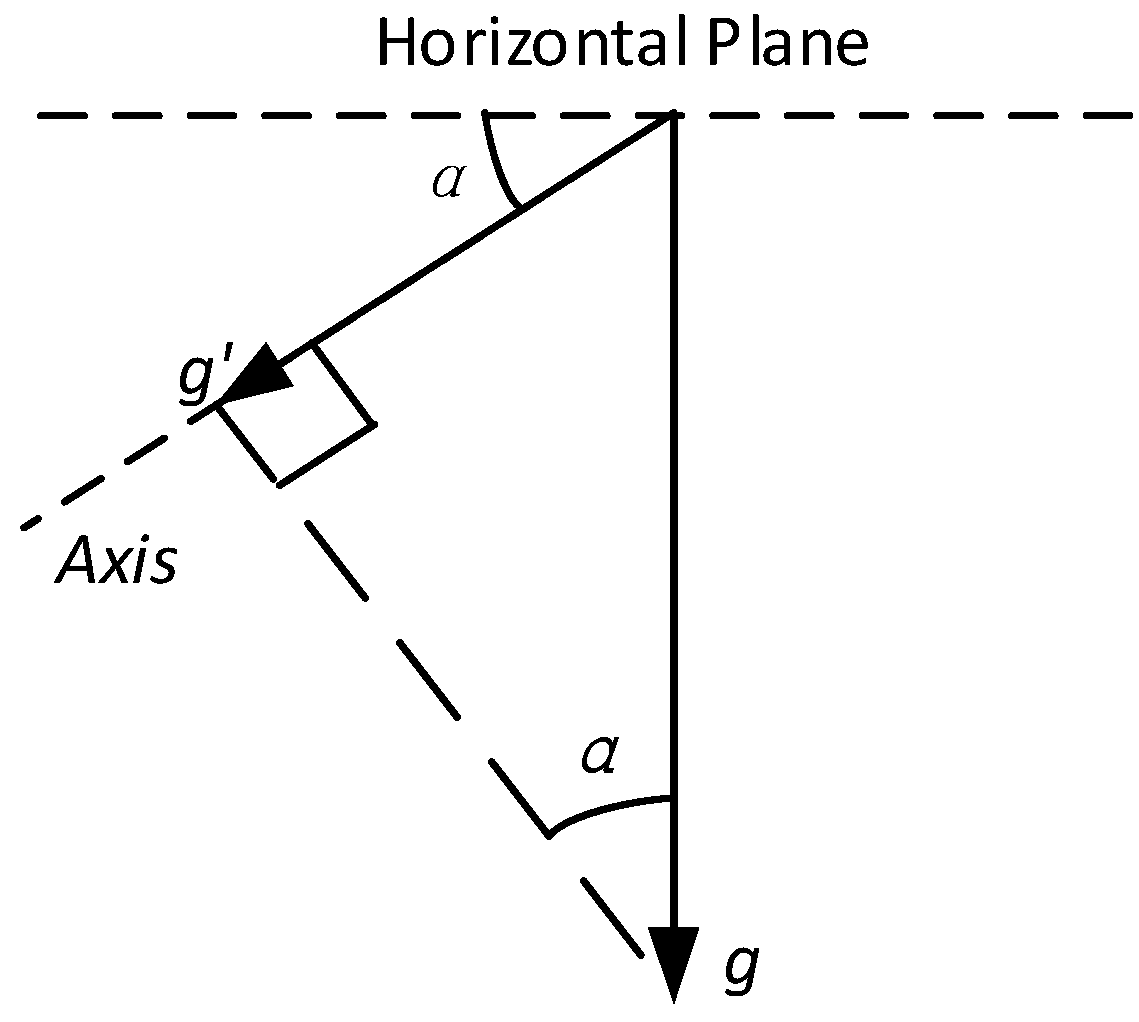
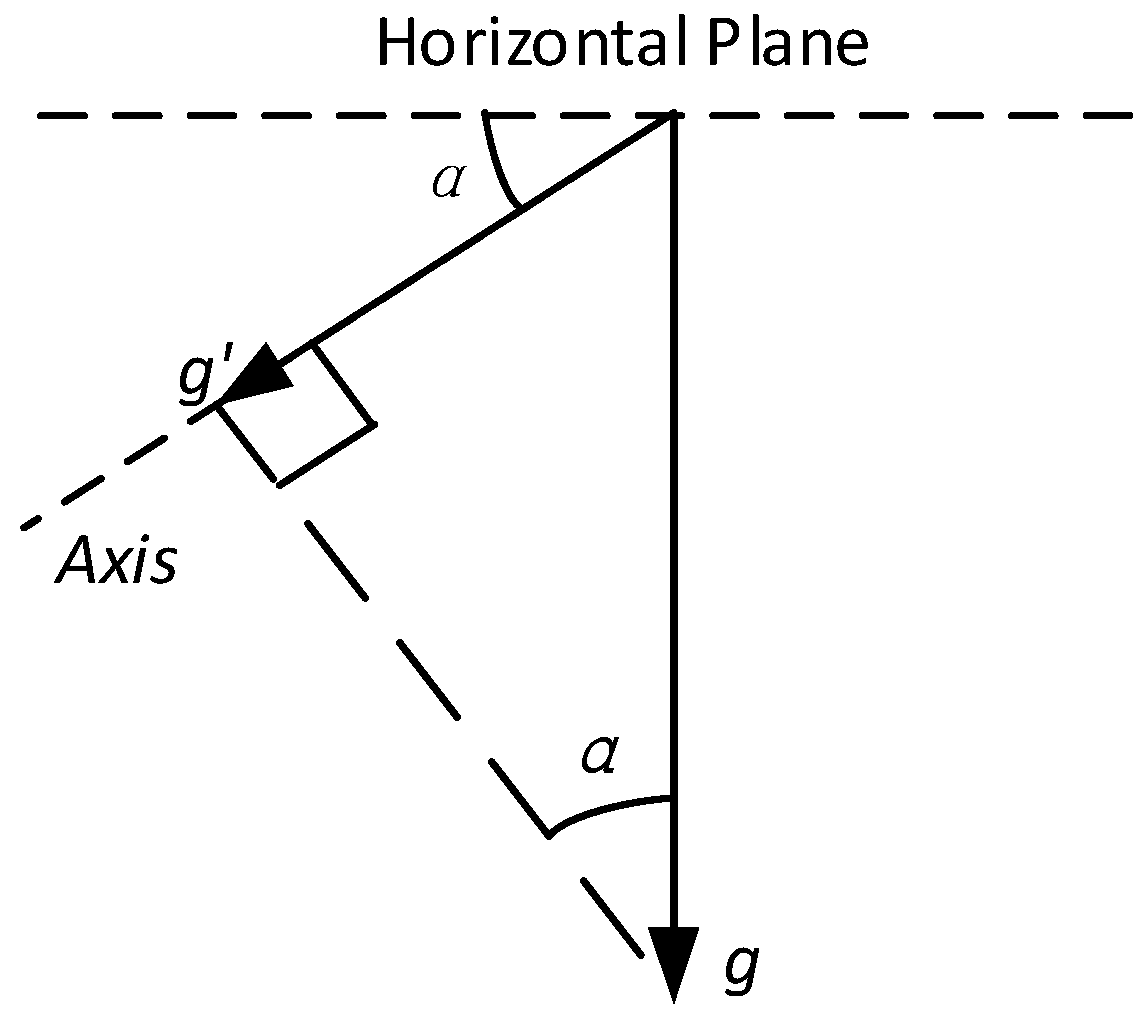
3.1. Expression of g’
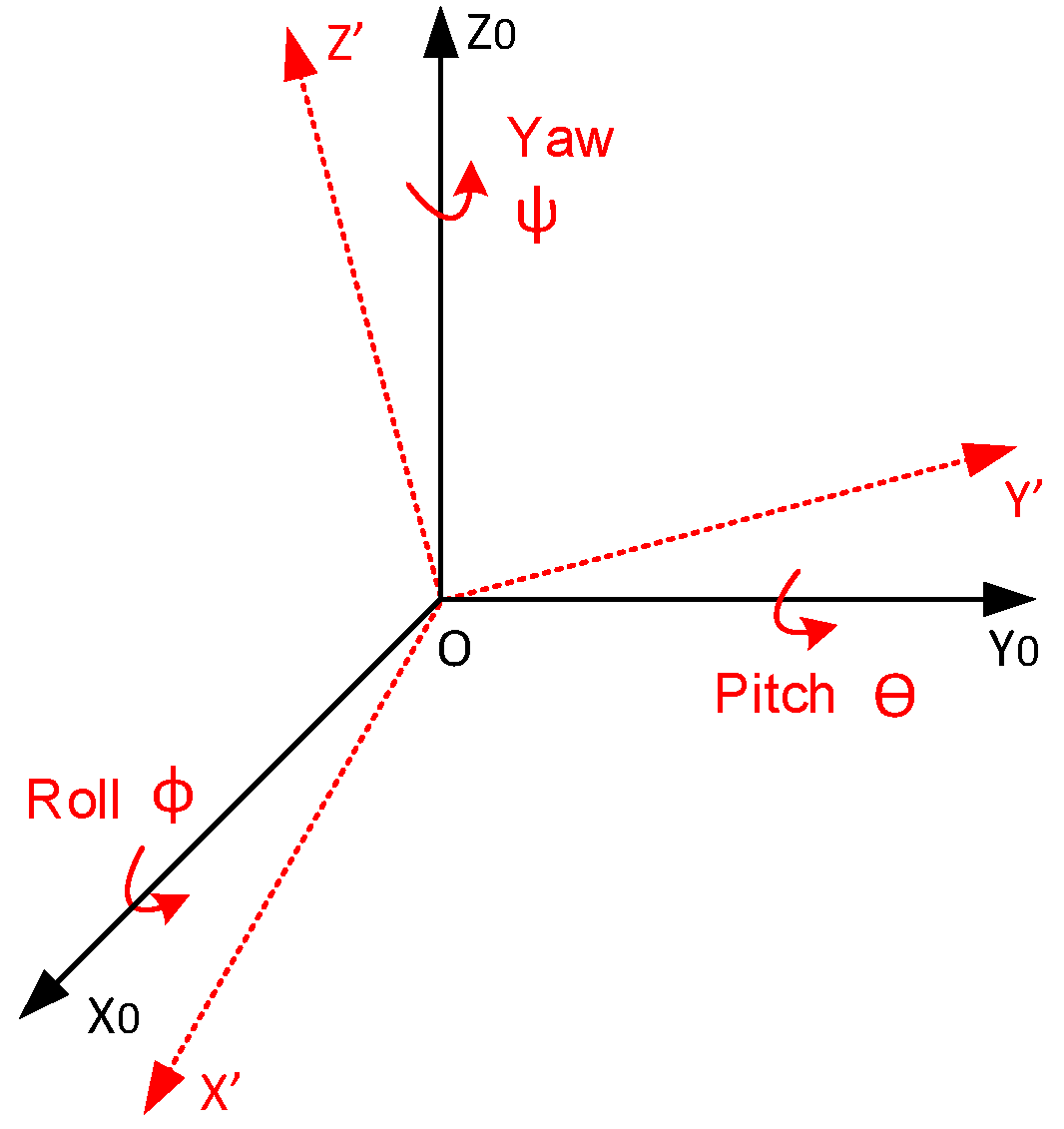
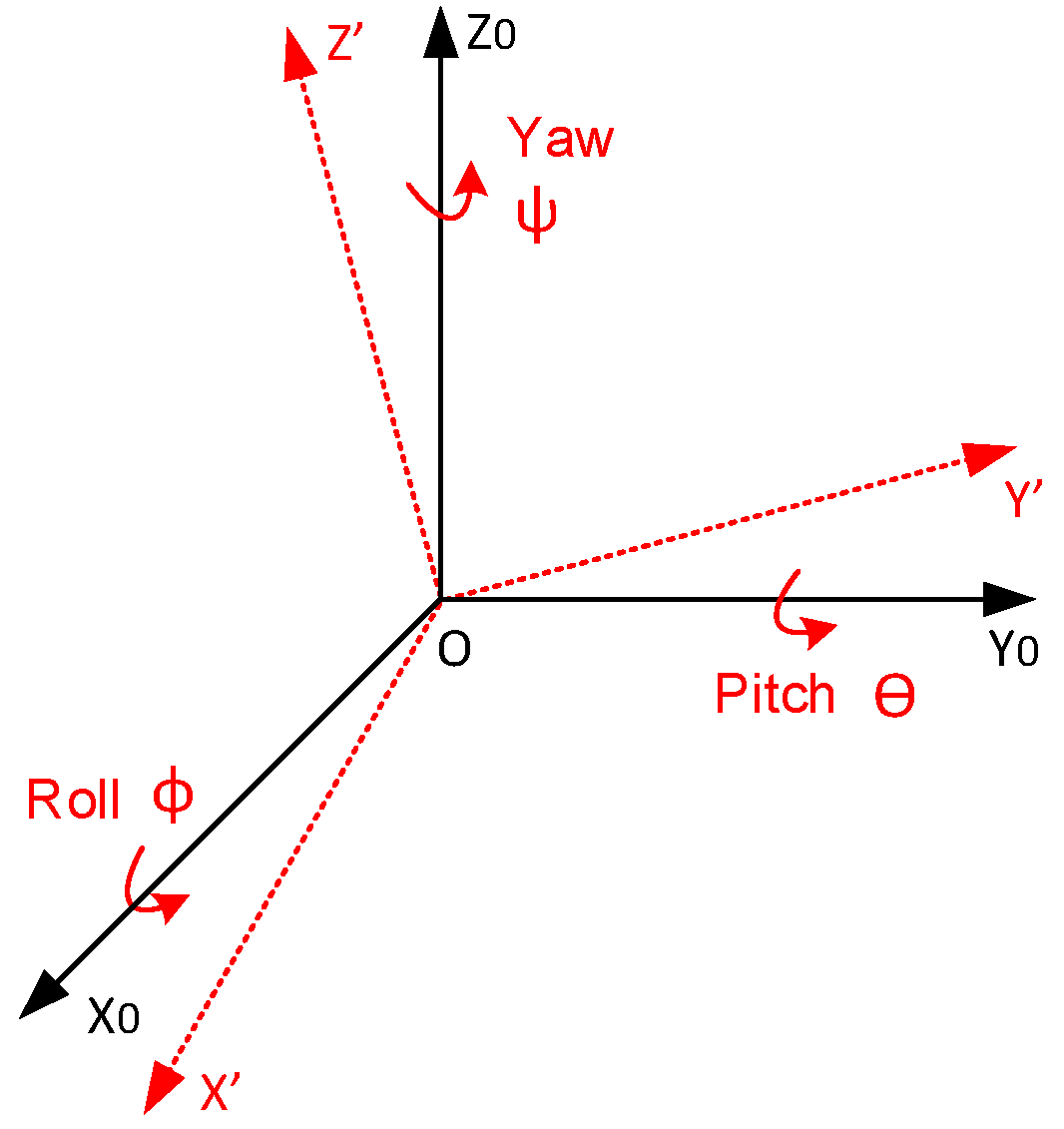
3.2. Acquirement of Rotation Angles
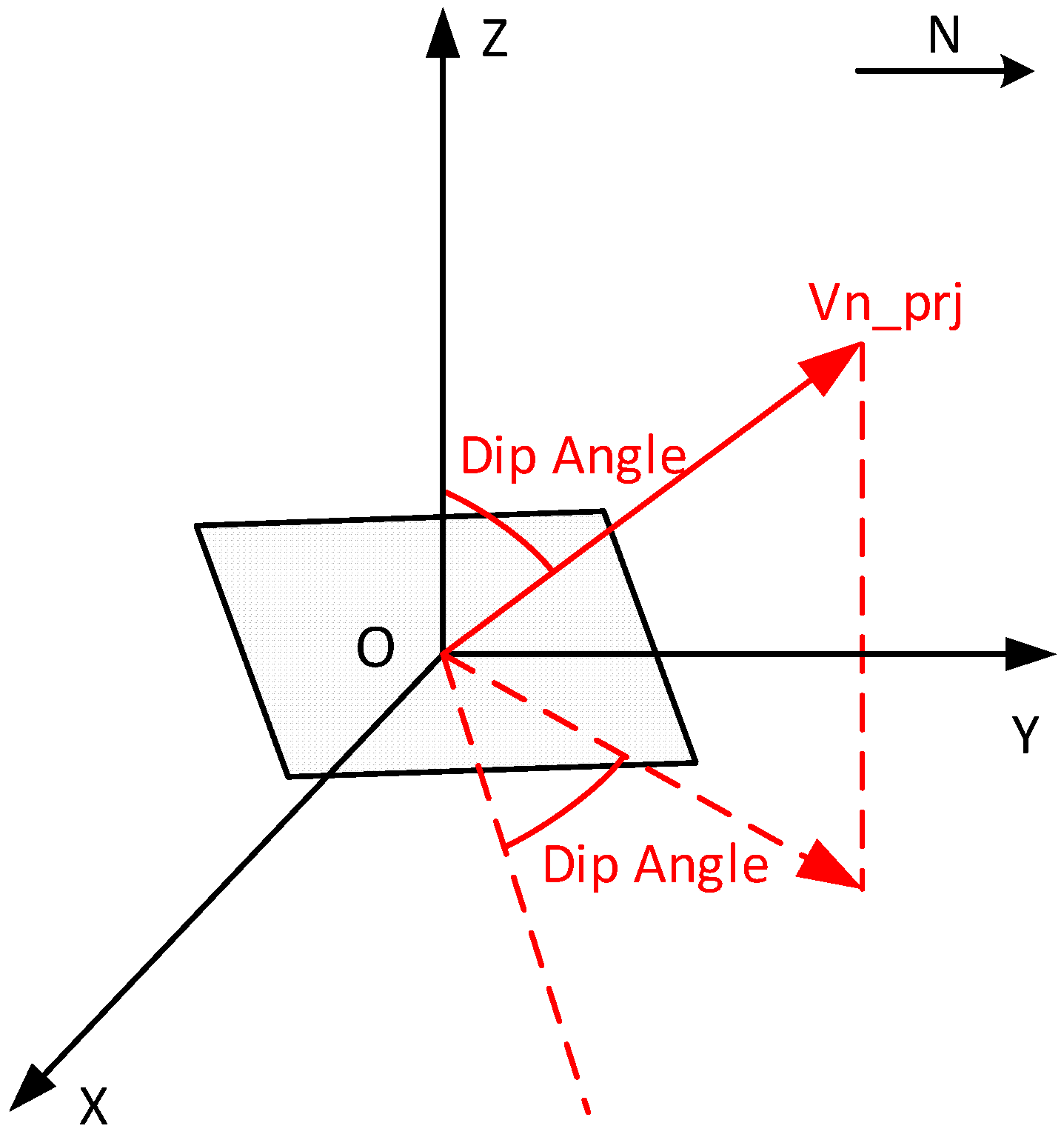
3.3. Derivation of the Normal Vector
4. Positional Estimate Using Kalman Filter
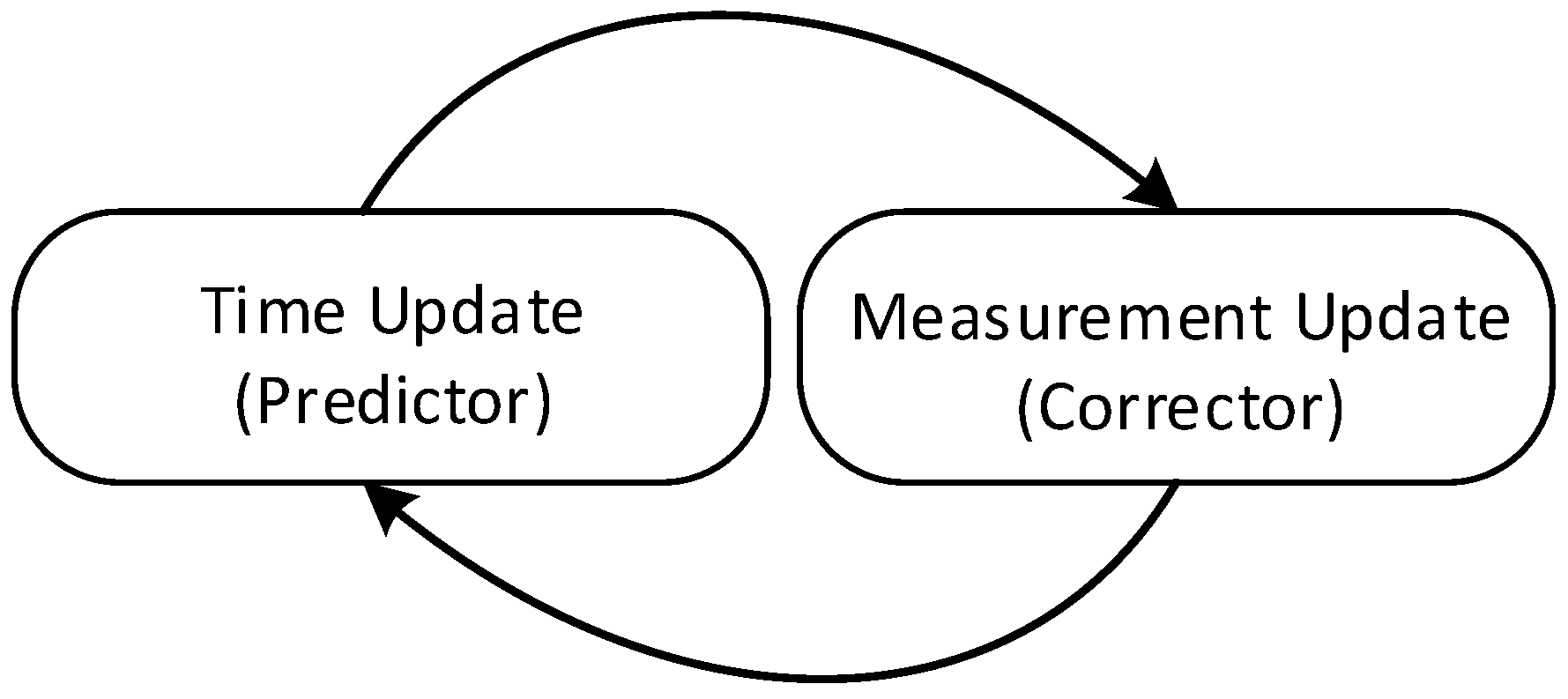
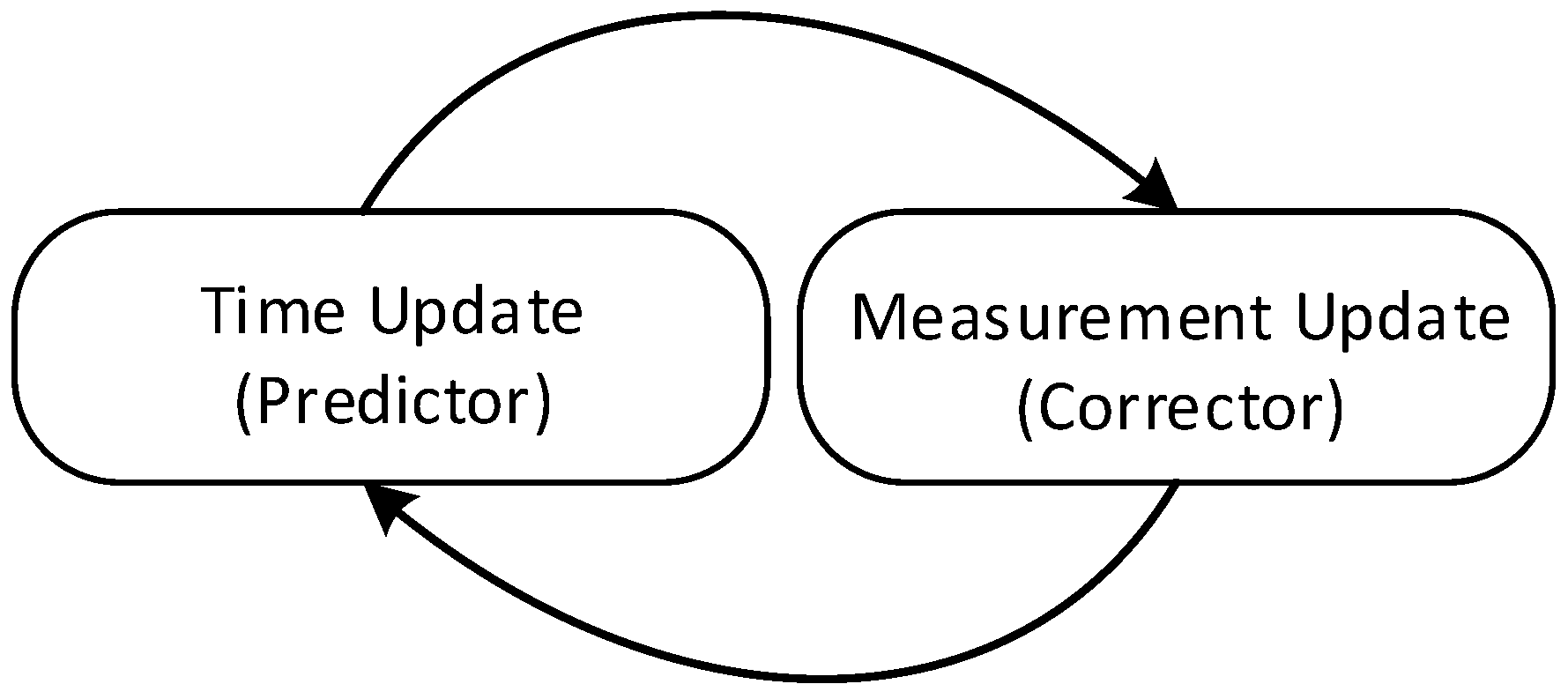
4.1. A Brief Introduction of Kalman Filter
- A—State transition matrix relating the state at the previous time step k − 1 to that at the current step k;
- u—Optional control input;
- B—Control matrix that relates u to the state x;
- w—Process noise vector, w(i) is normally distributed denoted by N(0, Q) and the covariance , where ;
- H—Meaurement transition matrix relating the state x to the measurement z;
- v—Measurement noise vector, is normally distributed denoted by and the covariance , where , and w and are statistically independent.
4.2. Application of Kalman Filter to Monitor Tunneling-Induced Ground Subsidence from Sensor Motion
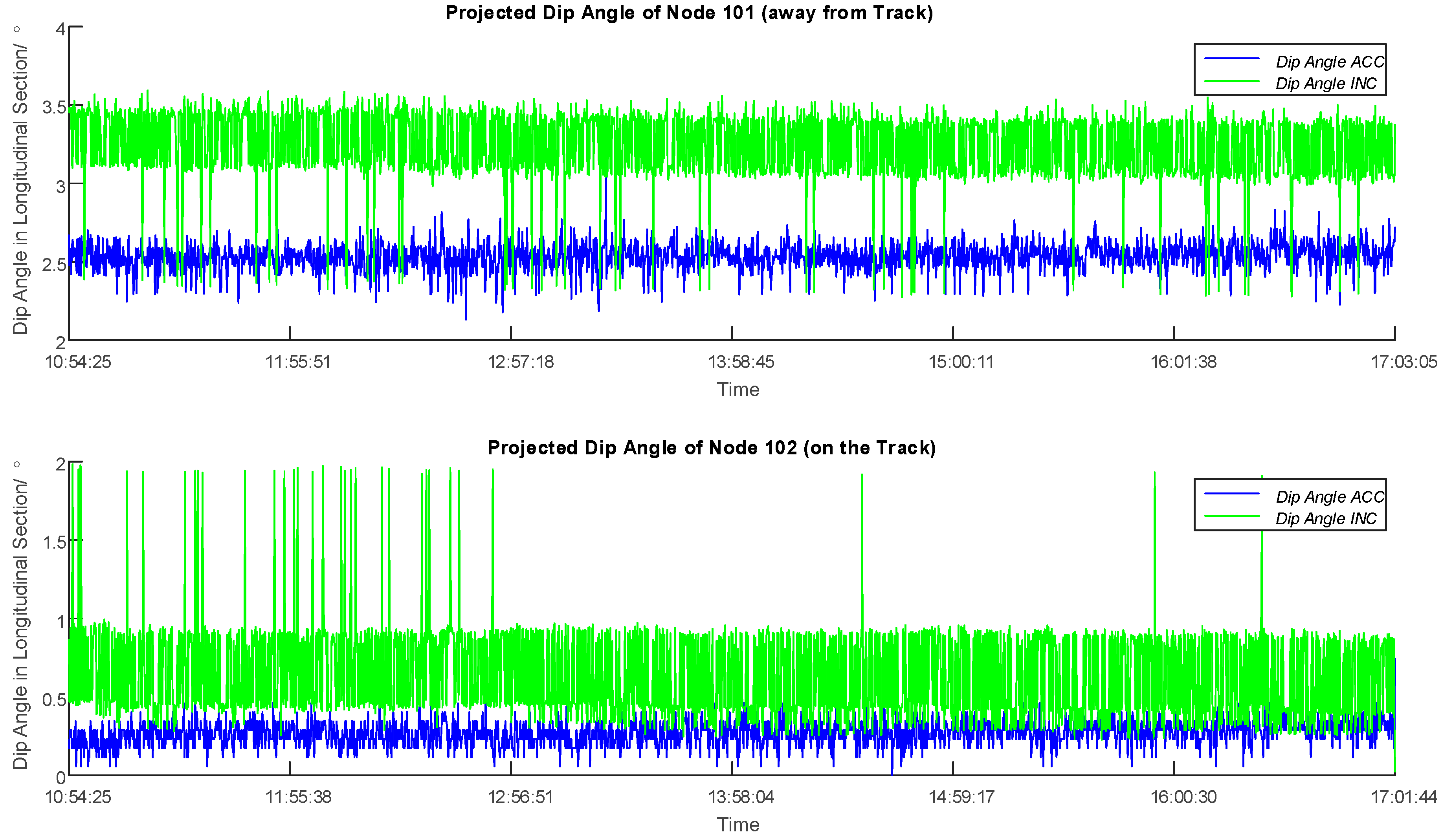
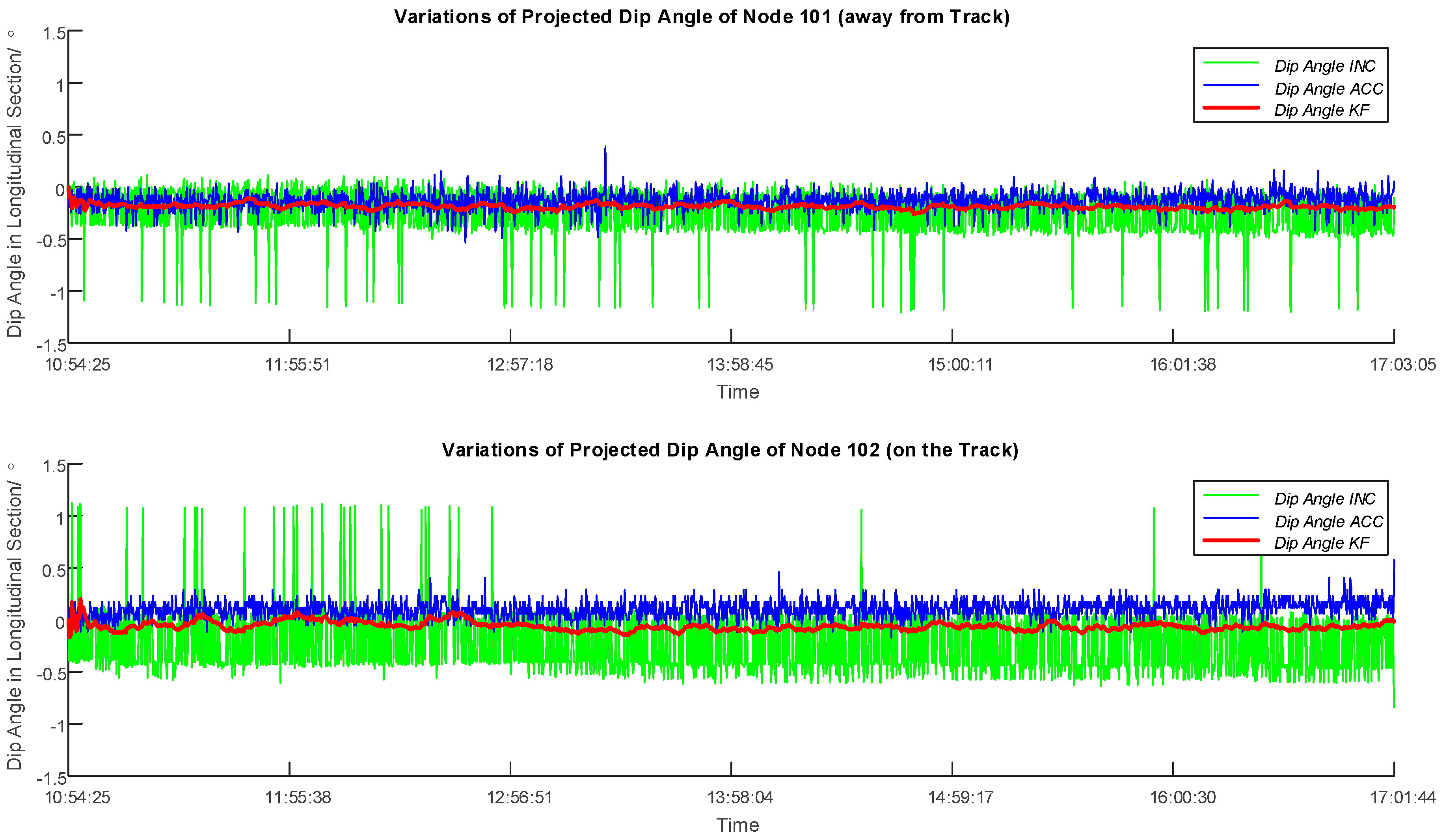
4.3. Evaluation and Discussion of the Filtering
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Padhy, P.; Martinez, K.; Riddoch, A.; Ong, H.L.R.; Hart, J.K. Glacial environment monitoring using sensor networks. In Real-World Wireless Sensor Networks; Springer: Stockholm, Sweden, 2005. [Google Scholar]
- Cho, C.Y.; Chou, P.H.; Chung, Y.C.; King, C.T.; Tsai, M.J.; Lee, B.J.; Chou, T.Y. Wireless Sensor Networks for Debris Flow Observation. In Proceedings of the 5th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Francisco, CA, USA, 16–20 June 2008.
- Ramesh, M.V. Real-time Wireless Sensor Network for Landslide Detection. In Proceedings of the 3rd International Conference on Sensor Technologies and Applications (Sensorcomm 2009), Athens, Greece, 18–23 June 2009; pp. 405–409.
- Li, M.; Liu, Y.H. Underground Coal Mine Monitoring with Wireless Sensor Networks. ACM Trans. Sensor Netw. 2009, 5. [Google Scholar] [CrossRef]
- Roy, P.; Bhattacharjee, S.; Ghosh, S.; Misra, S.; Obaidat, M.S. Fire monitoring in coal mines using Wireless Sensor Networks. In Proceedings of the 2011 International Symposium on Performance Evaluation of Computer & Telecommunication Systems (SPECTS), Hague, The Netherlands, 27–30 June 2011.
- Fernandez-Steeger, T.M.; Arnhardt, C.; Walter, K.; Niemeyer, F.; Nakaten, B.; Homfeld, S.D.; Asch, K.; Azzam, R.; Bill, R.; Ritter, H.; et al. SLEWS—A Prototype System for Flexible Real Time Monitoring of Landslides Using an Open Spatial Data Infrastructure and Wireless Sensor Networks. Geotechnol. Sci. Rep. 2009, 13, 3–15. [Google Scholar]
- Azzam, R.; Arnhardt, C.; Fernandez-Steeger, T.M. Monitoring and Early Warning of Slope Instabilities and Deformations by Sensor Fusion in Self-Organized Wireless ad-hoc Sensor Networks. In Proceedings of the International Symposium and the 2nd AUN/Seed-Net Regional Conference on Geo-Disaster Mitigation in ASEAN-Protecting Life from Geo-Disaster and Environmental Hazards, Yogyakarta, Indonesia, 25–26 February 2010.
- May, M. X-SLEWS: Developing a Modular Wireless Monitoring System for Geoengineering Wide Area Monitoring. Master Thesis, RWTH Aachen University, Aachen, Germany, March 2013. [Google Scholar]
- Arnhardt, C. Monitoring of Surface Movements in Landslide Areas with a Self Organizing Wireless Sensor Network (WSN). Ph.D. Thesis, RWTH Aachen University, Aachen, German, 2011. [Google Scholar]
- Fernández-Steeger, T.; Ceriotti, M.; Link, J.Á.B.; May, M.; Hentschel, K.; Wehrle, K. “And Then, the Weekend Started”: Story of a WSN Deployment on a Construction Site. J. Sensor Actuator Netw. 2013, 2, 156–171. [Google Scholar] [CrossRef]
- Li, C.; Tomás Manuel, F.-S.; Jó Ágila, B.L.; Matthias, M.; Rafig, A. Use of Mems Accelerometers/Inclinometers as a Geotechnical Monitoring Method for Ground Subsidence. Acta Geodyn. Geomater. 2014, 11, 337–348. [Google Scholar] [CrossRef]
- Canli, E.; Thiebes, B.; Engels, A.; Glade, T.; Schweigl, J.; Bertagnoli, M. Multi-parameter monitoring of a slow moving landslide in Gresten (Austria). In Proceedings of the European Geoscience Union General Assembly, Vienna, Austria, 12–17 April 2015.
- Murata. SCA8X0 21X0 3100 Product Family Specification. Available online: http://www.murata.com/~/media/webrenewal/products/sensor/accel/sca2100/sca8x0_21x0_3100_product_family_specification_82_694_00f.ashx?la=en (accessed on 2 June 2016).
- Pedley, M. Tilt Sensing Using a Three-Axis Accelerometer; Freescale Semiconductor Inc.: Austin, TX, USA, 2013. [Google Scholar]
- Li, C. Multi-Sensor Data Fusion for Geohazards Early Warning System—An Adapted Process Model. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2015. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Fluids Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 1995. [Google Scholar]
- Willner, D.; Chang, C.B.; Dunn, K.P. Kalman Filter Configurations for Multiple Radar Systems; NASA: Washington, DC, USA, 1976.
- Brown, C.M.; Durrant-Whyte, H.; Leonard, J.J.; Rao, B. Centralized and decentralized Kalman filter techniques for navigation, and control. In Proceedings of the a workshop on Image understanding workshop, Morgan Kaufmann Publishers Inc., Palo Alto, CA, USA, 23–26 May 1989; pp. 651–675.
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB, 3rd ed.; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1997. [Google Scholar]
- Fourati, H. Multisensor Data Fusion: From Algorithms and Architectural Design to Applications; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Willner, D.; Chang, C.B.; Dunn, K.P. Kalman filter algorithms for a multi-sensor system. In Proceedings of the IEEE Conference on Decision and Control including the 15th Symposium on Adaptive Processes, Clearwater, FL, USA, 1–3 December 1976; pp. 570–574.
- Carlson, N.A. Federated square root filter for decentralized parallel processors. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 517–525. [Google Scholar] [CrossRef]
- Carlson, N.A.; Berarducci, M.P. Federated Kalman Filter Simulation Results. Navigation 1994, 41, 297–322. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Accelerometer | Inclinometer |
|---|---|---|
| Product | SCA3100-D04 | SCA830-D07 |
| Size(w × h × l) | 7.0 × 3.3 × 8.6 mm3 | 7.6 × 3.3 × 8.6 mm3 |
| Measurement Axis | 3-axis | 1-axis |
| Range | ±2 g | ±1 g |
| Sensitivity (LSB/g) | 900 (0.0637°/count) | 32,000 (0.00179°/count) |
| Time Update Equations | Measurement Update Equations | ||
|---|---|---|---|
| (12) | (14) | ||
| (13) | (15) | ||
| (16) |
| Time Update Equations | Measurement Update Equations | ||
|---|---|---|---|
| (21) | (23) | ||
| (22) | (24) | ||
| (25) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Azzam, R.; Fernández-Steeger, T.M. Kalman Filters in Geotechnical Monitoring of Ground Subsidence Using Data from MEMS Sensors. Sensors 2016, 16, 1109. https://doi.org/10.3390/s16071109
Li C, Azzam R, Fernández-Steeger TM. Kalman Filters in Geotechnical Monitoring of Ground Subsidence Using Data from MEMS Sensors. Sensors. 2016; 16(7):1109. https://doi.org/10.3390/s16071109
Chicago/Turabian StyleLi, Cheng, Rafig Azzam, and Tomás M. Fernández-Steeger. 2016. "Kalman Filters in Geotechnical Monitoring of Ground Subsidence Using Data from MEMS Sensors" Sensors 16, no. 7: 1109. https://doi.org/10.3390/s16071109
APA StyleLi, C., Azzam, R., & Fernández-Steeger, T. M. (2016). Kalman Filters in Geotechnical Monitoring of Ground Subsidence Using Data from MEMS Sensors. Sensors, 16(7), 1109. https://doi.org/10.3390/s16071109