
Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning


Abstract
:1. Introduction
2. Methodologies
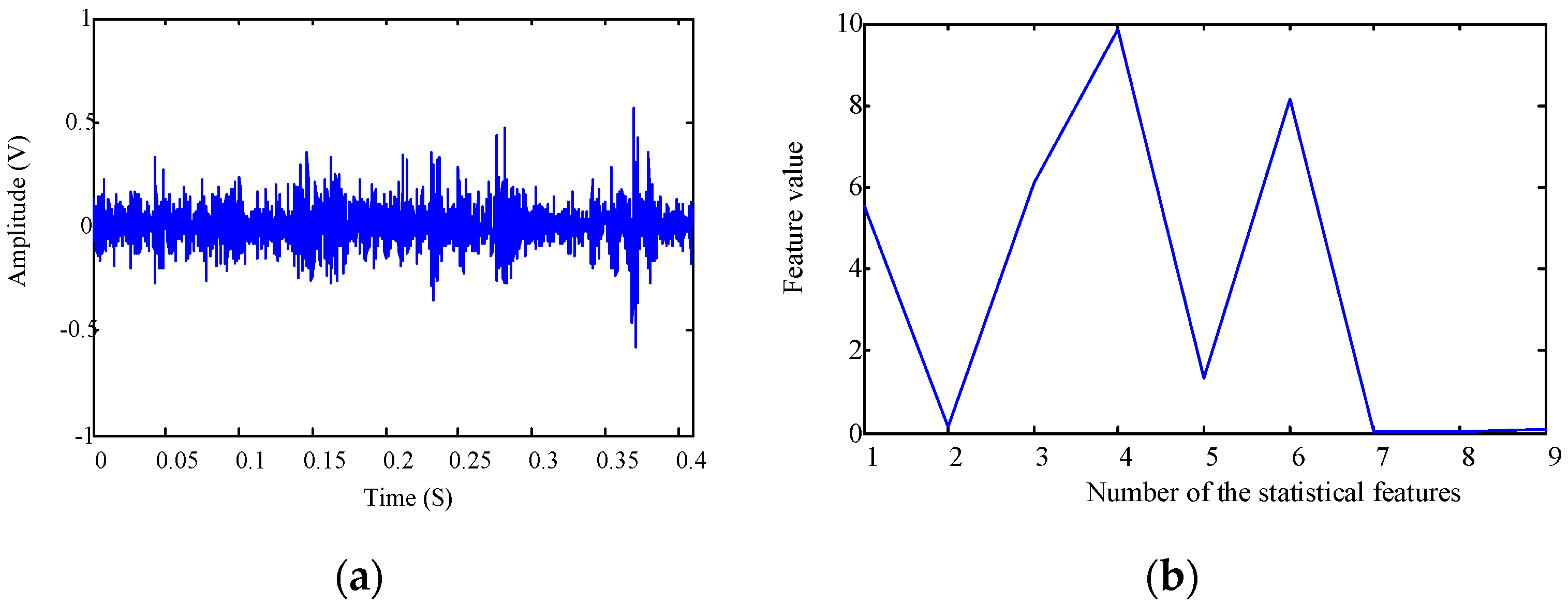
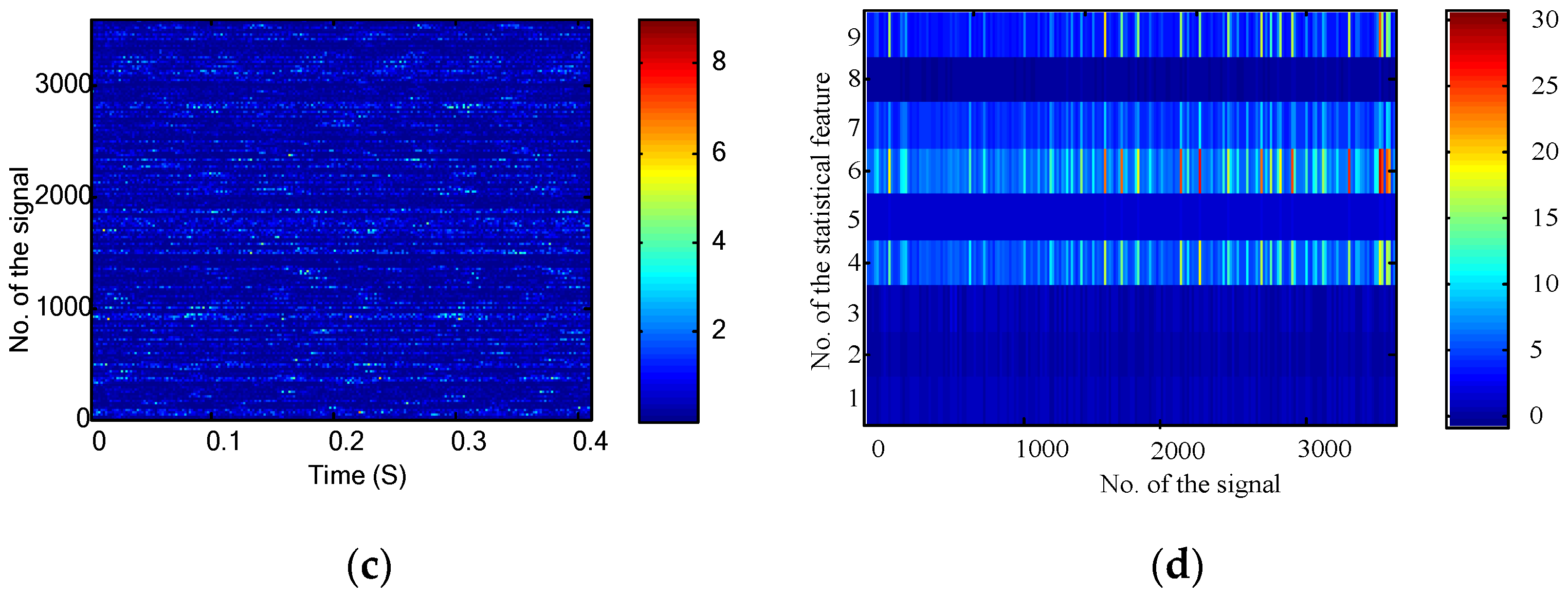
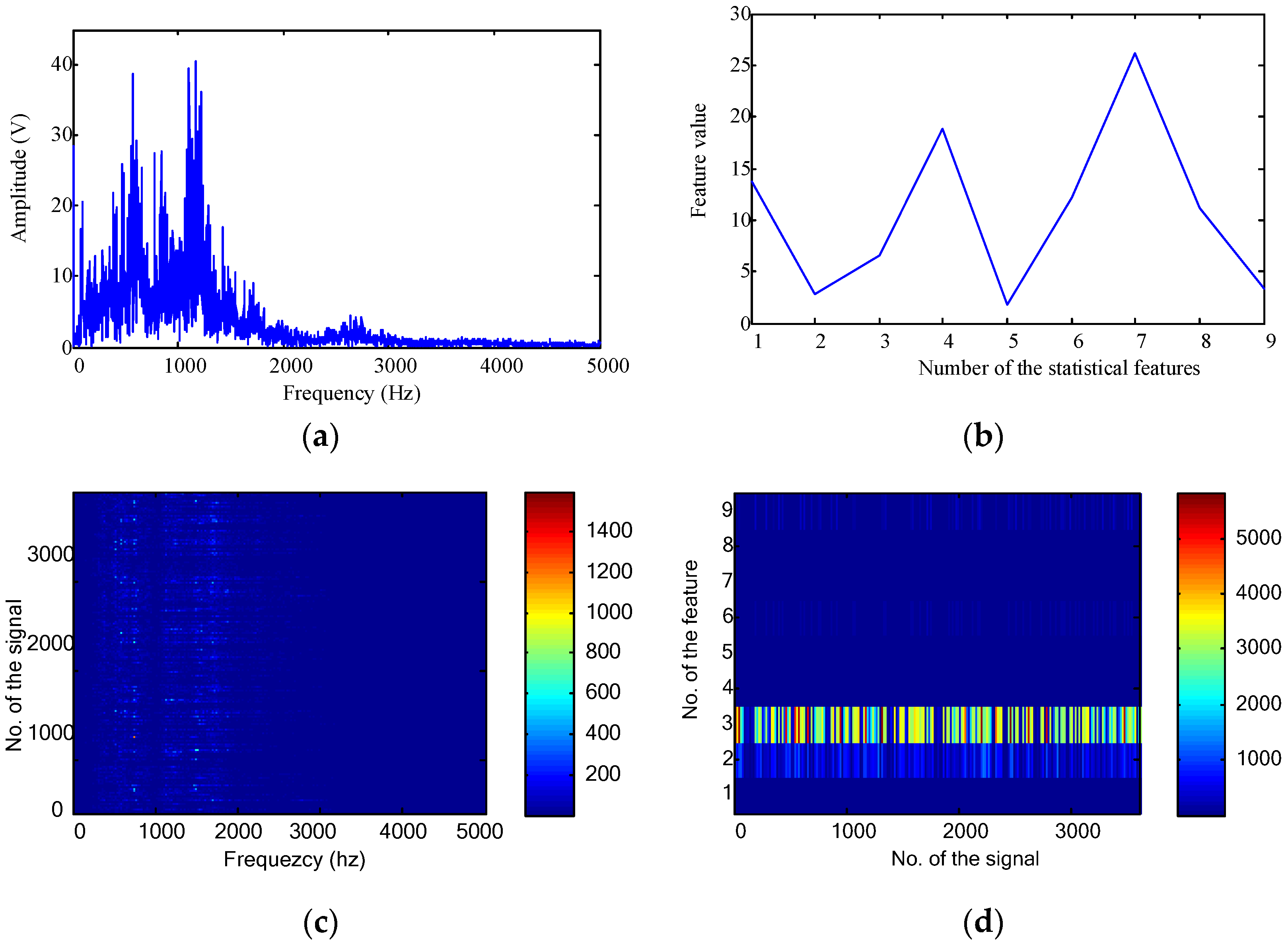
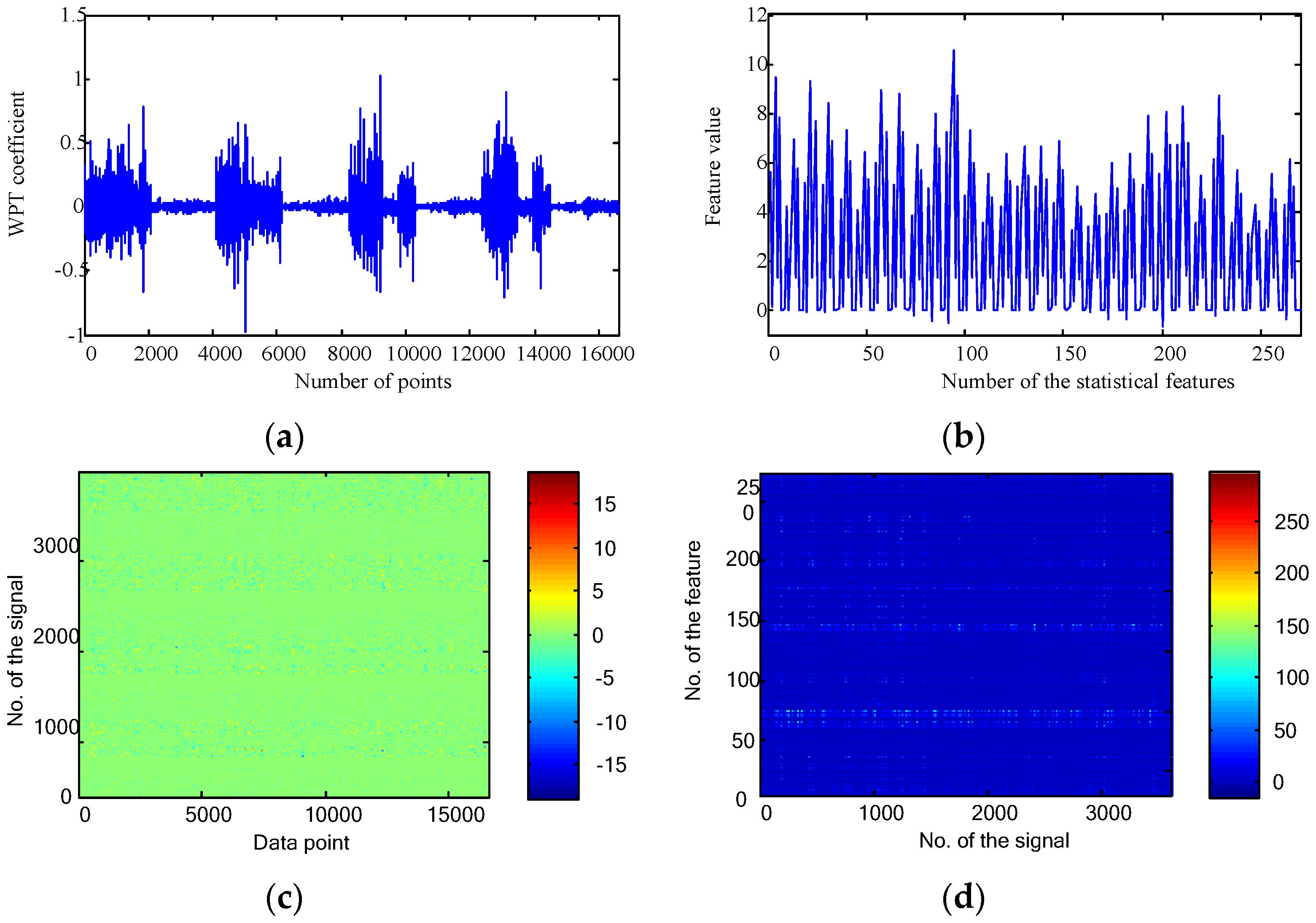
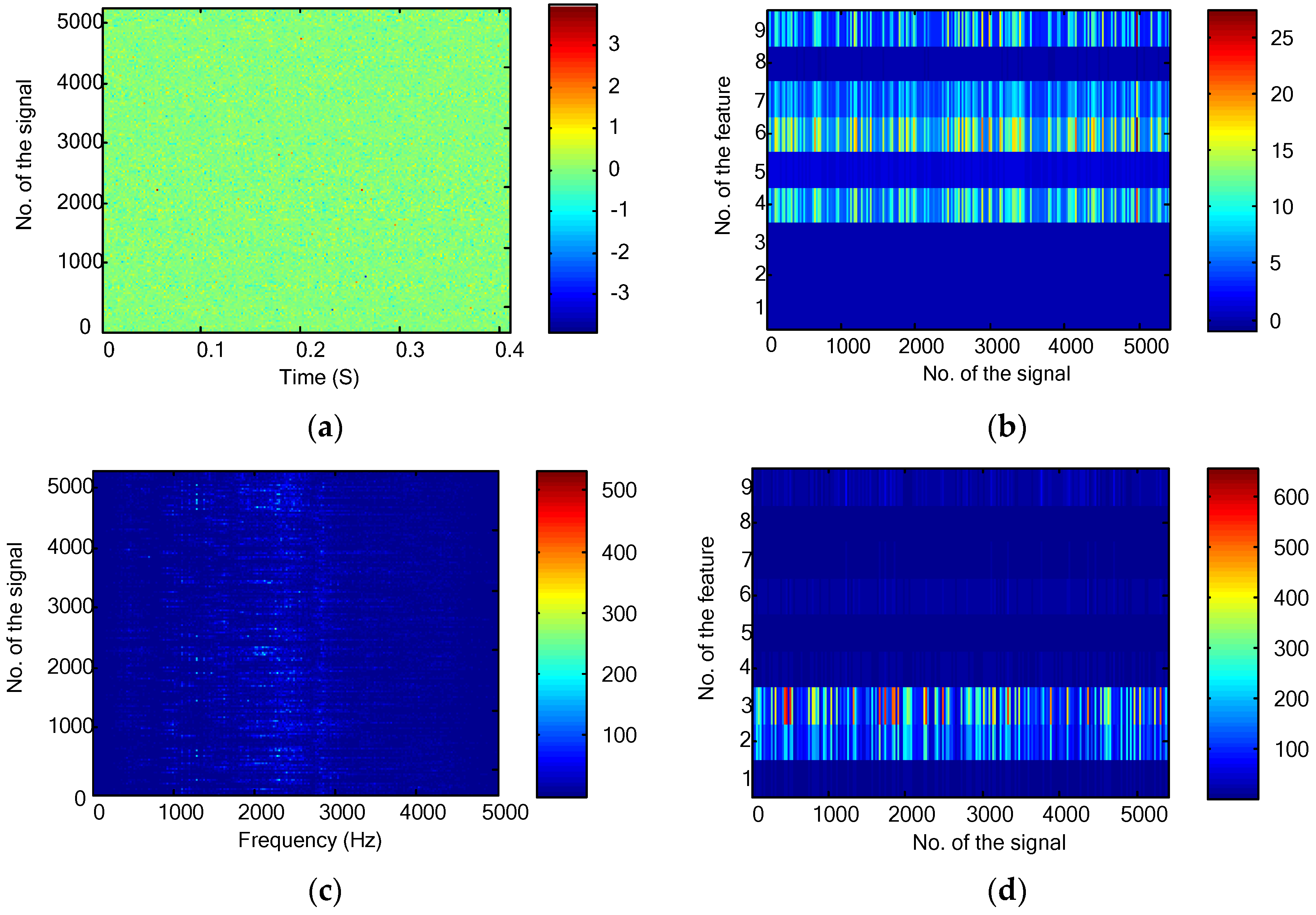
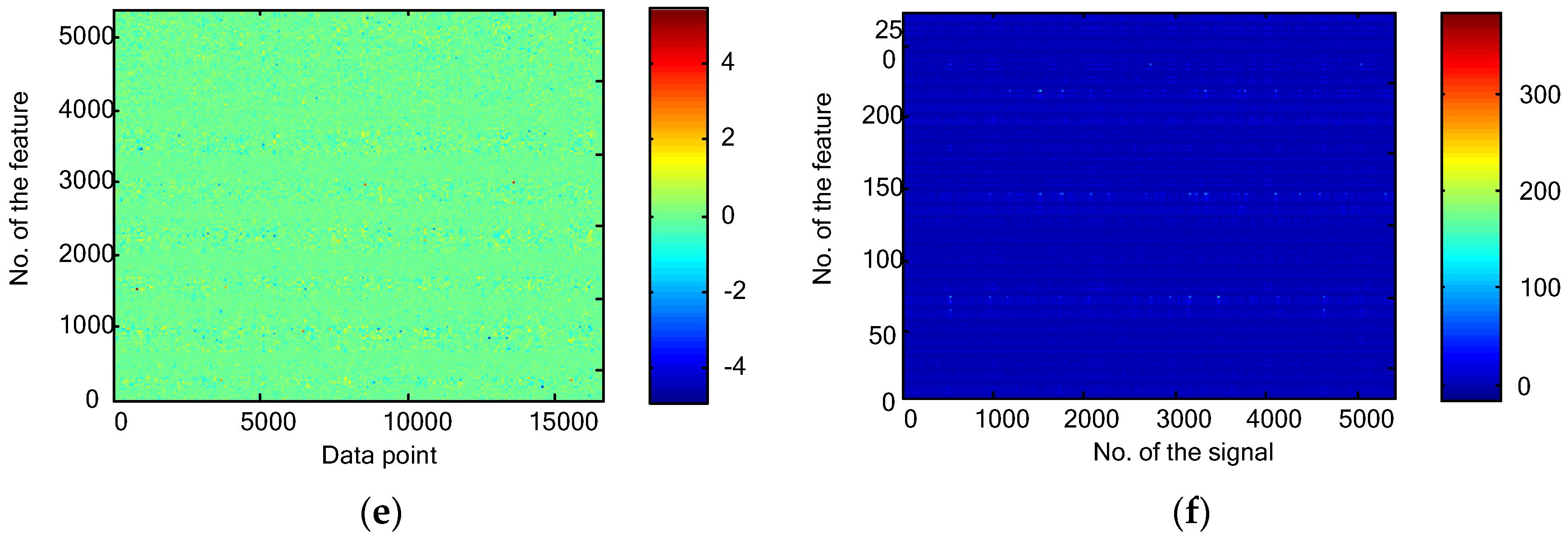
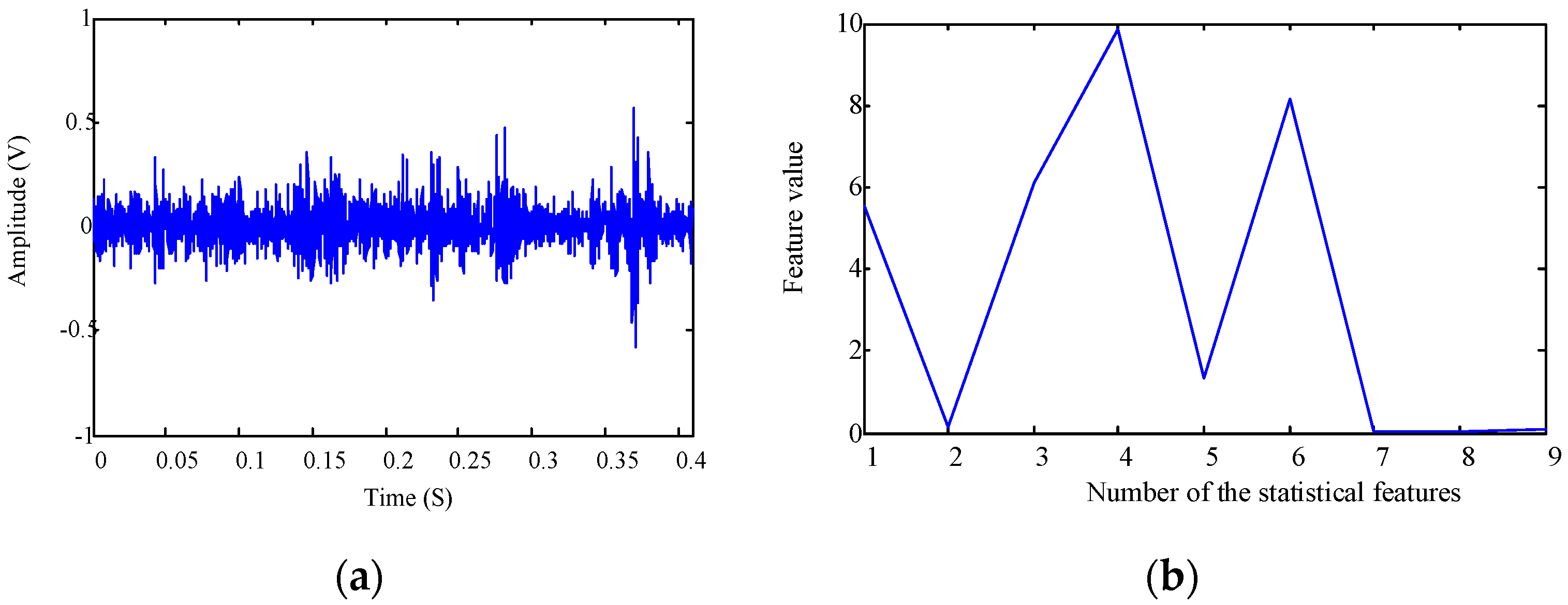
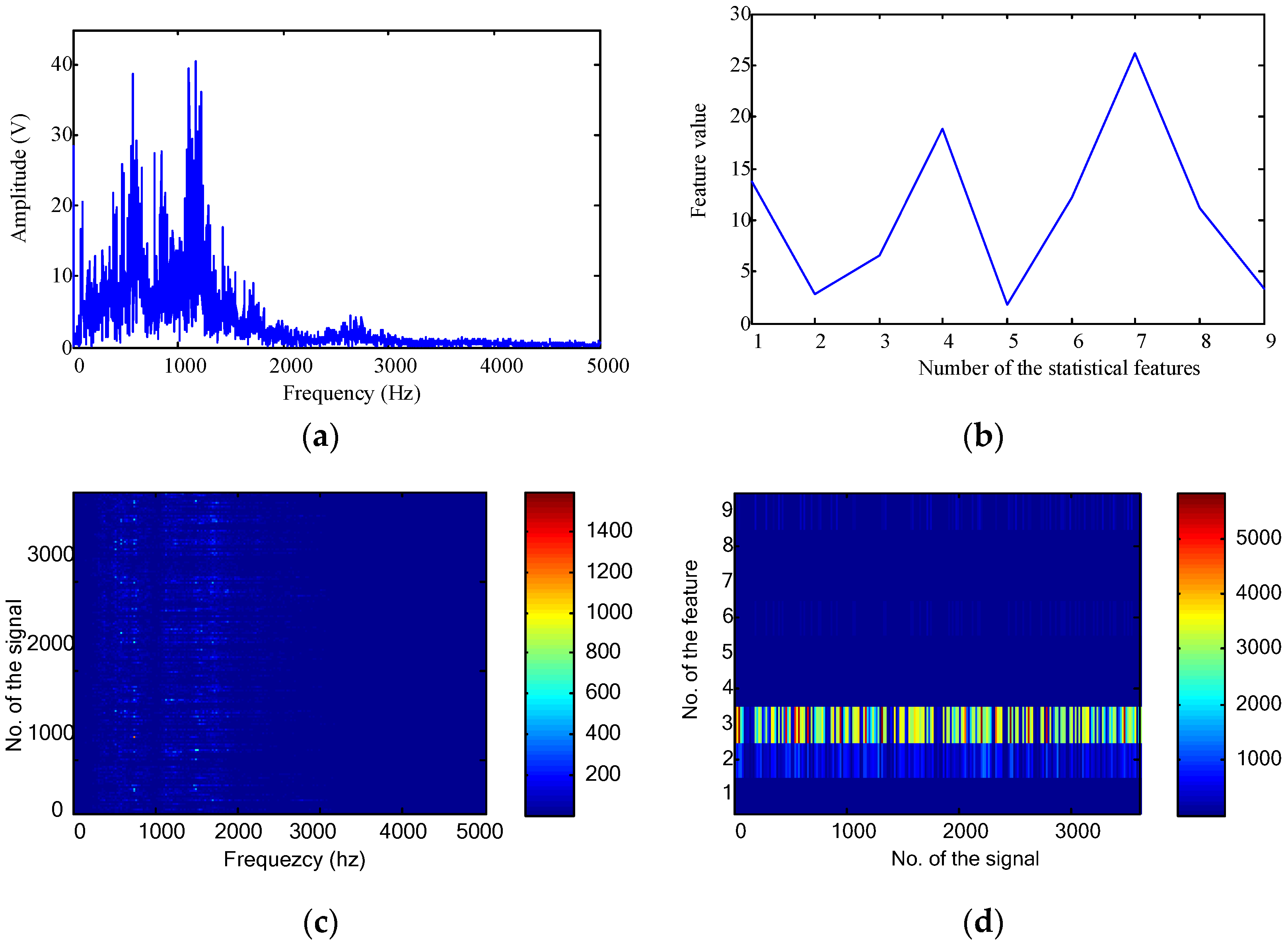
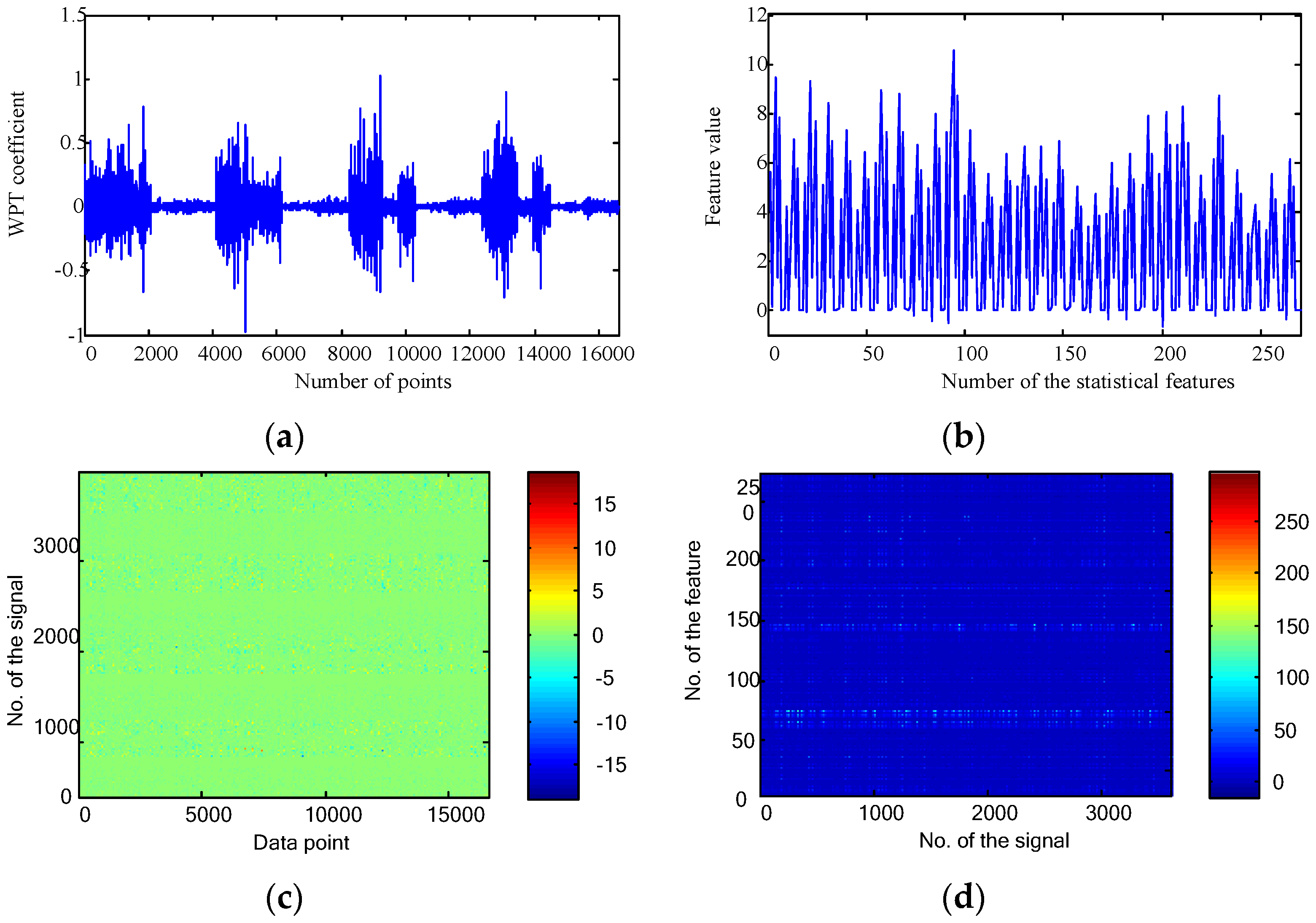
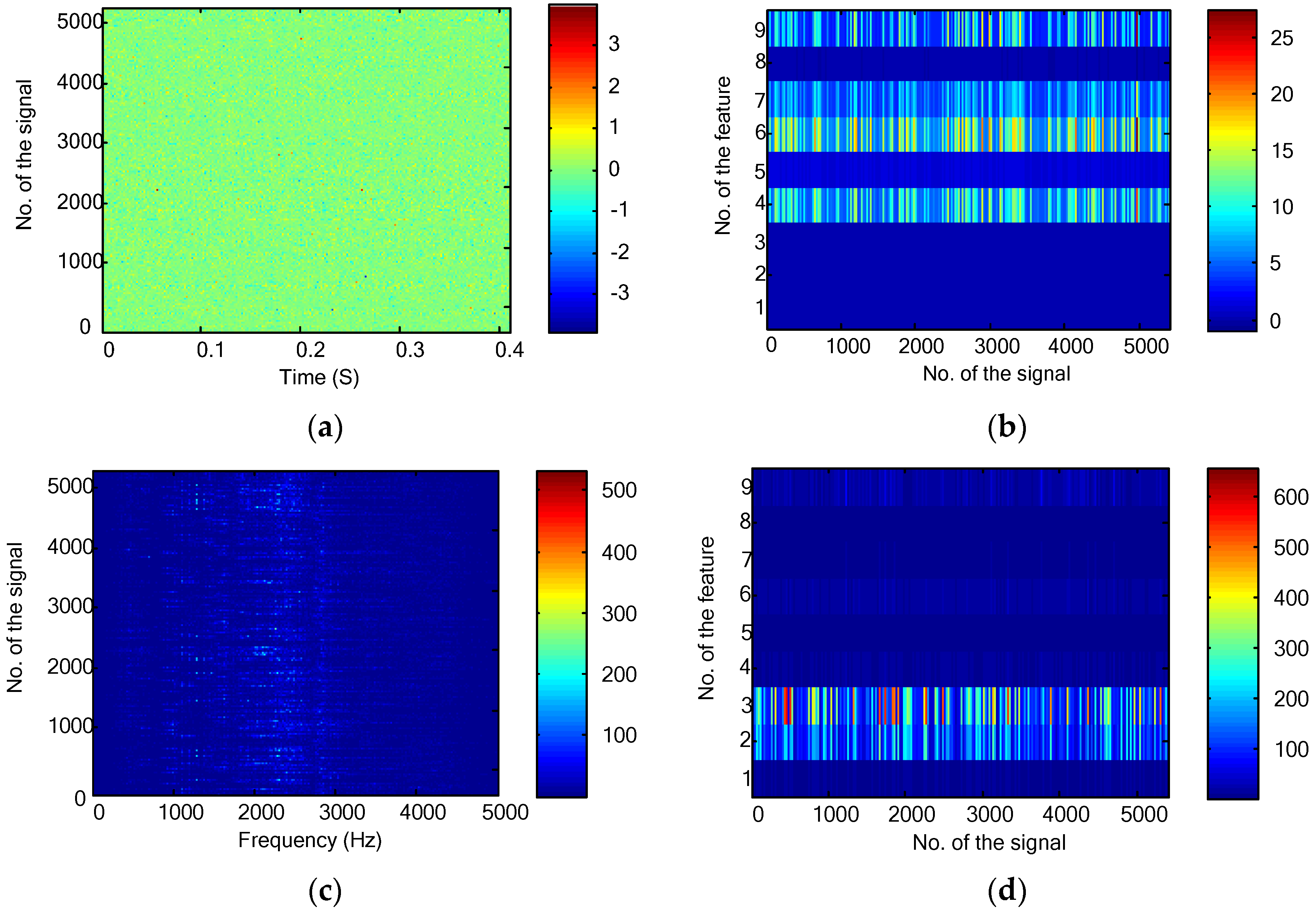
2.1. Statistical Features of the Vibration Sensor Signals
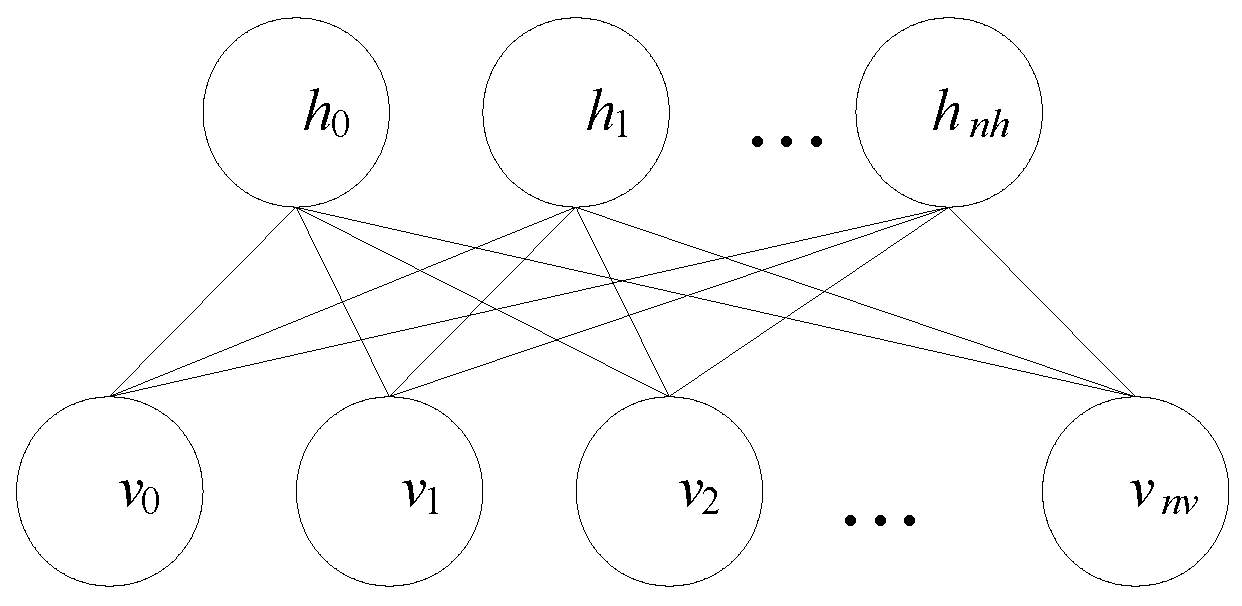
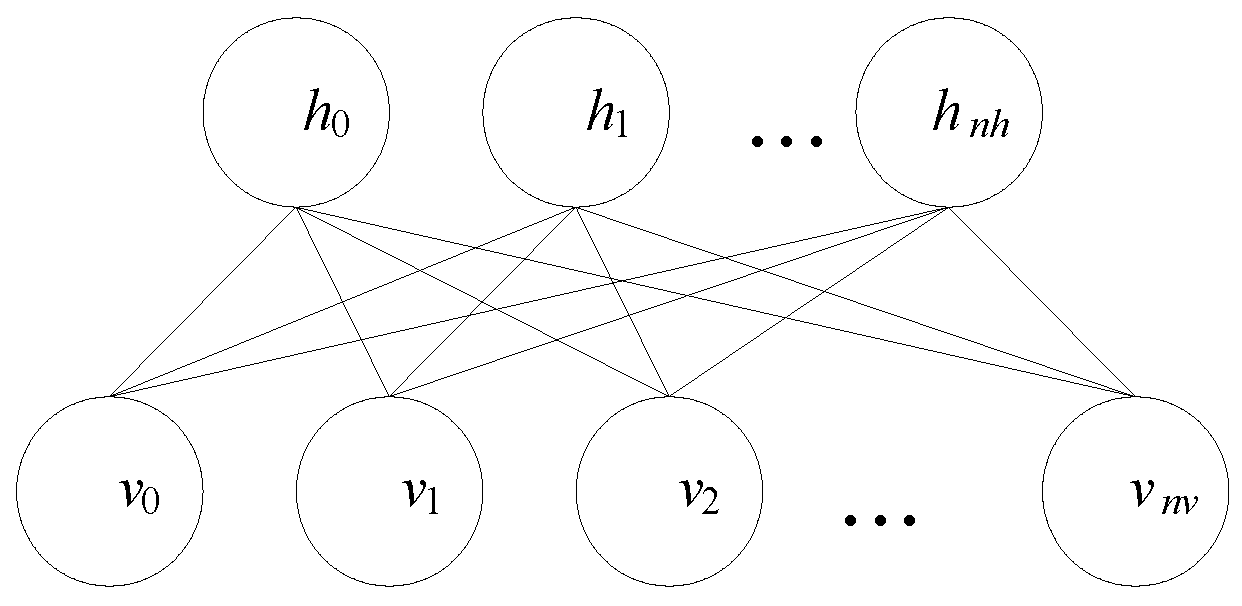
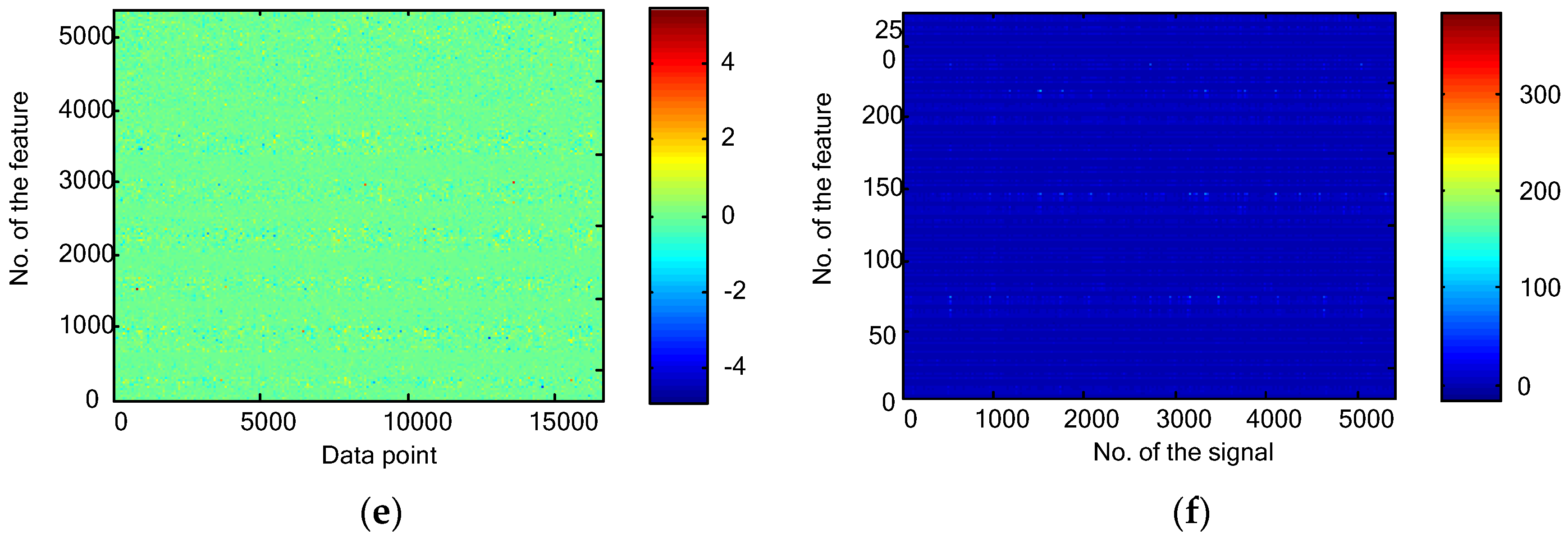
2.2. Statistical Feature Representation by Unsupervised Boltzmann Machines
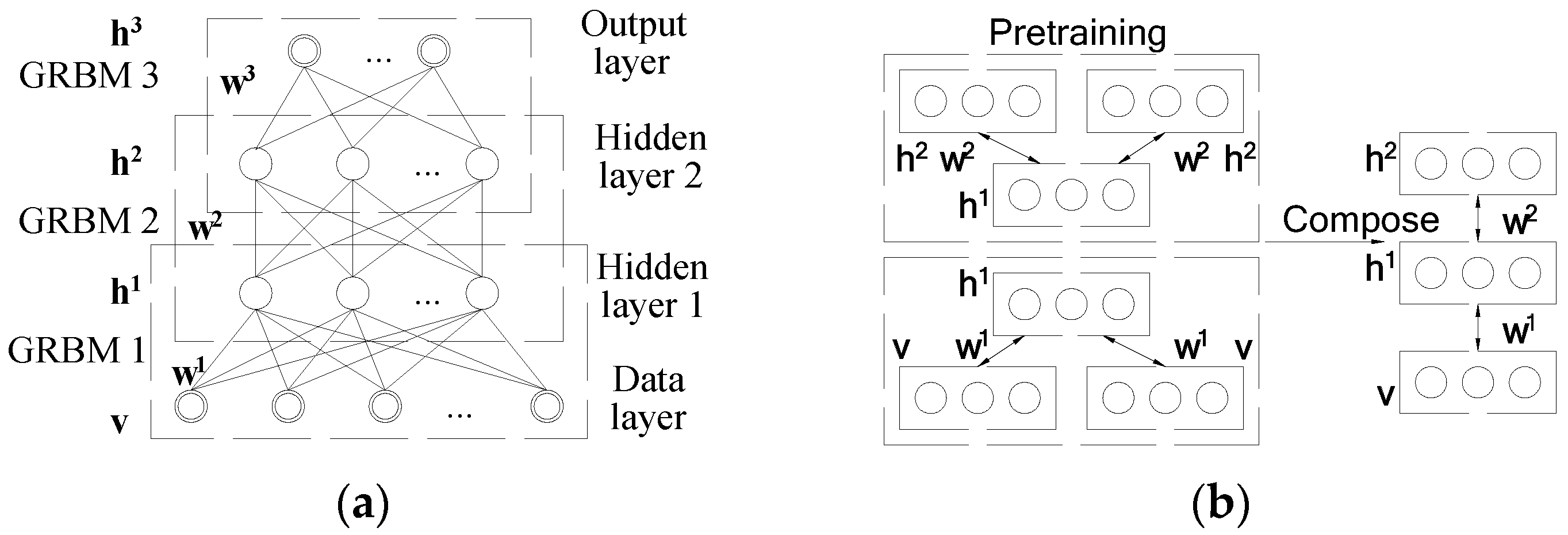
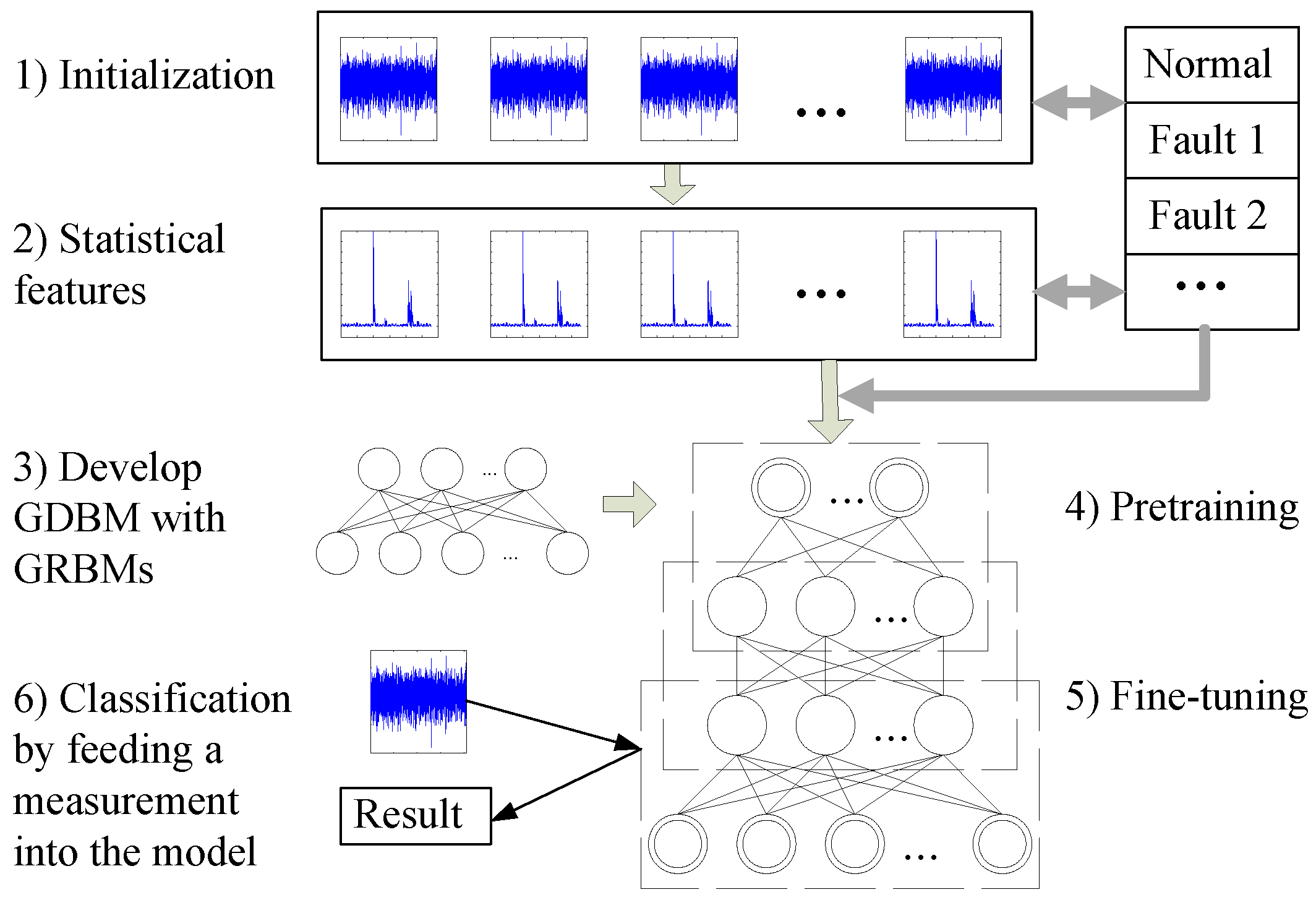
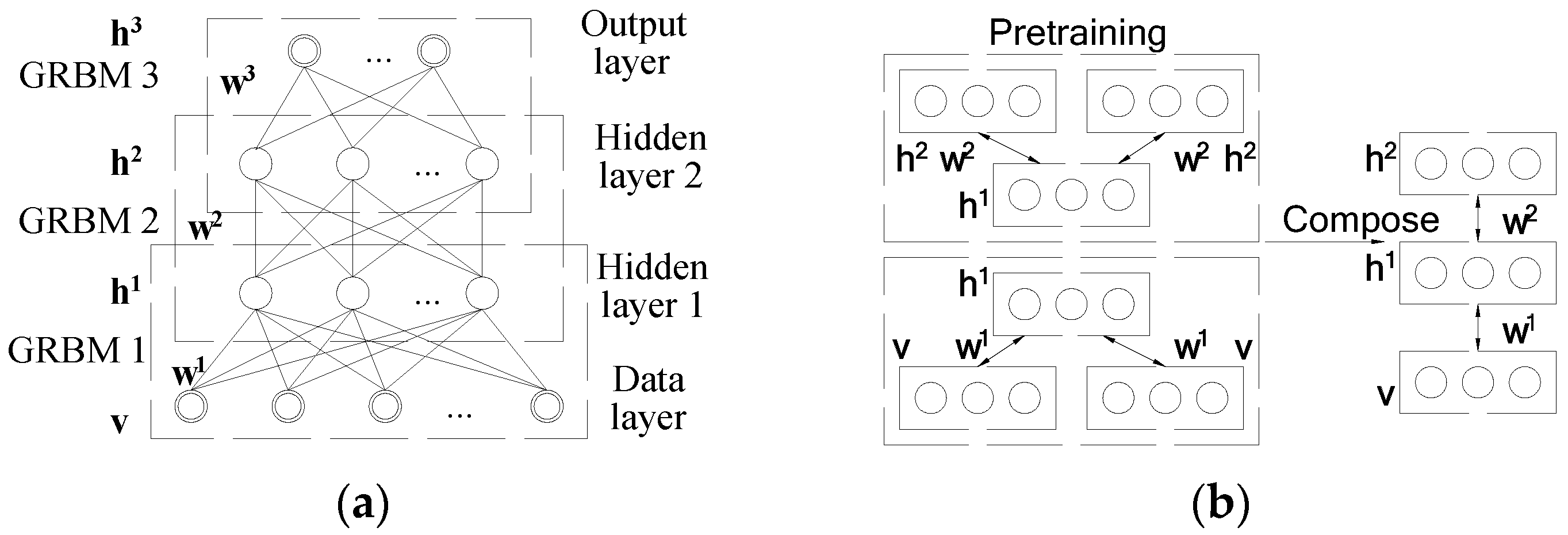
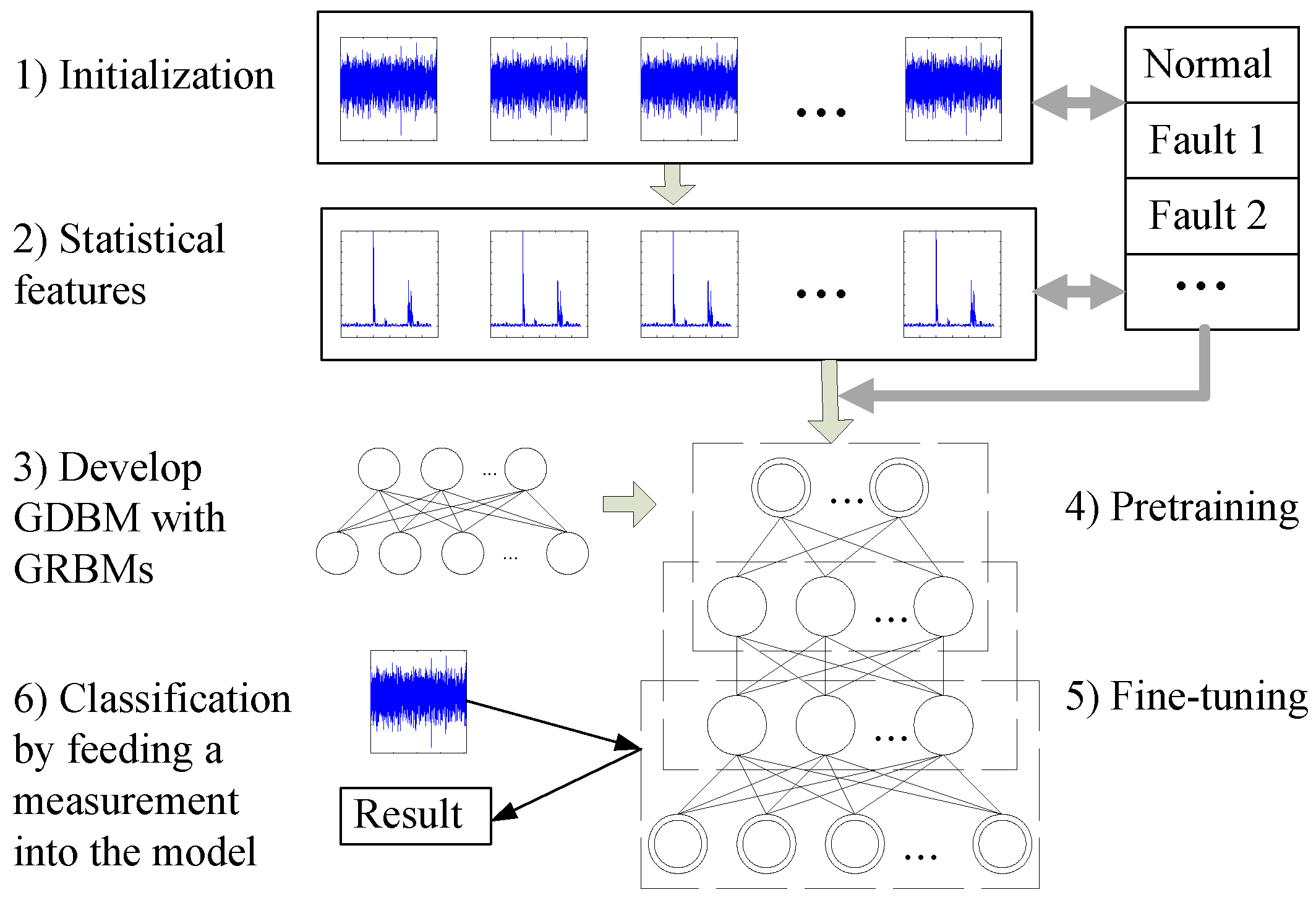
2.3. Deep Statistical Feature Learning and Classification
- Step 1.
- Collect the vibration signals x(t), define the fault patterns and the diagnosis problems;
- Step 2.
- Calculate the statistical feature set F according to Equation (8);
- Step 3.
- Step 4.
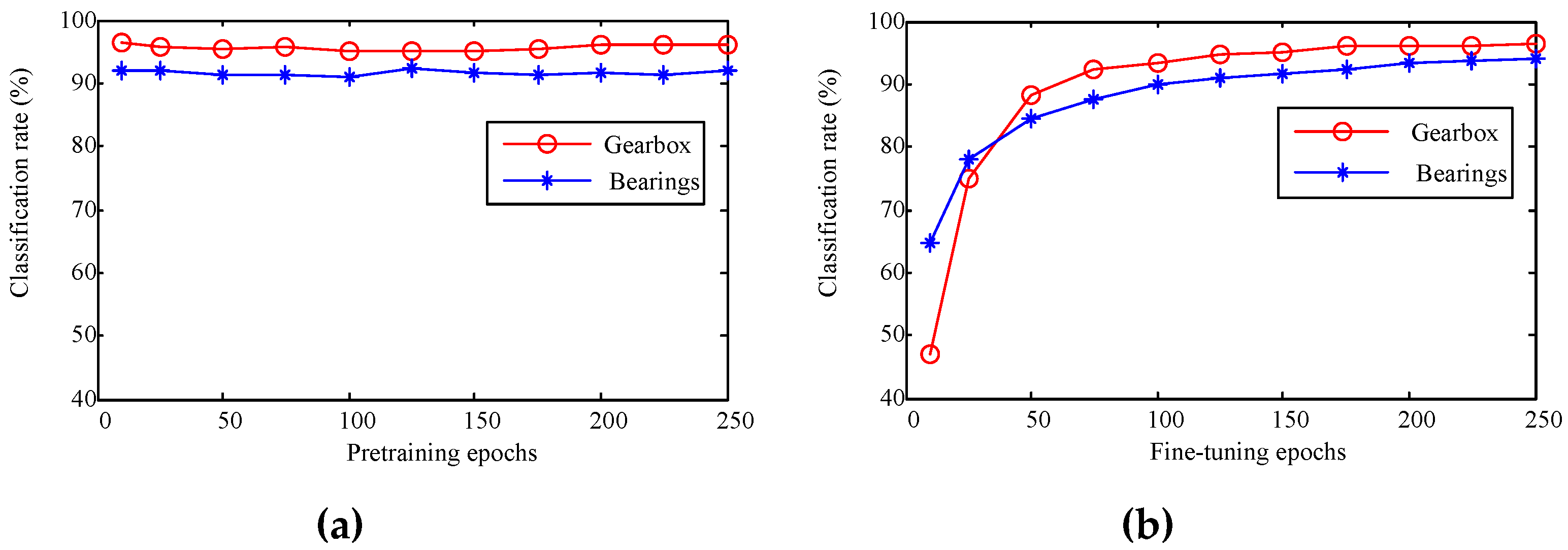
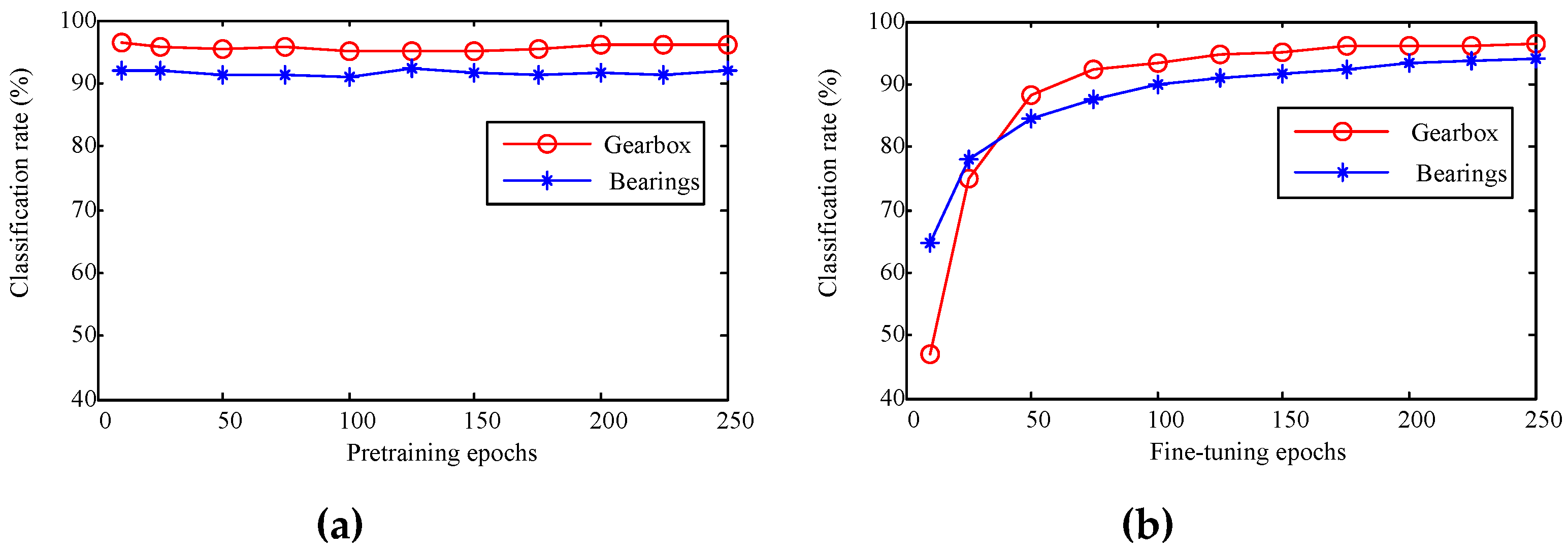
- Pretrain the GDBM model and its constituting GRBMs using the layer-by-layer unsupervised learning algorithm from the training dataset;
- Step 5.
- Fine-tune the GDBM weights using the BP algorithm from the training dataset; and
- Step 6.
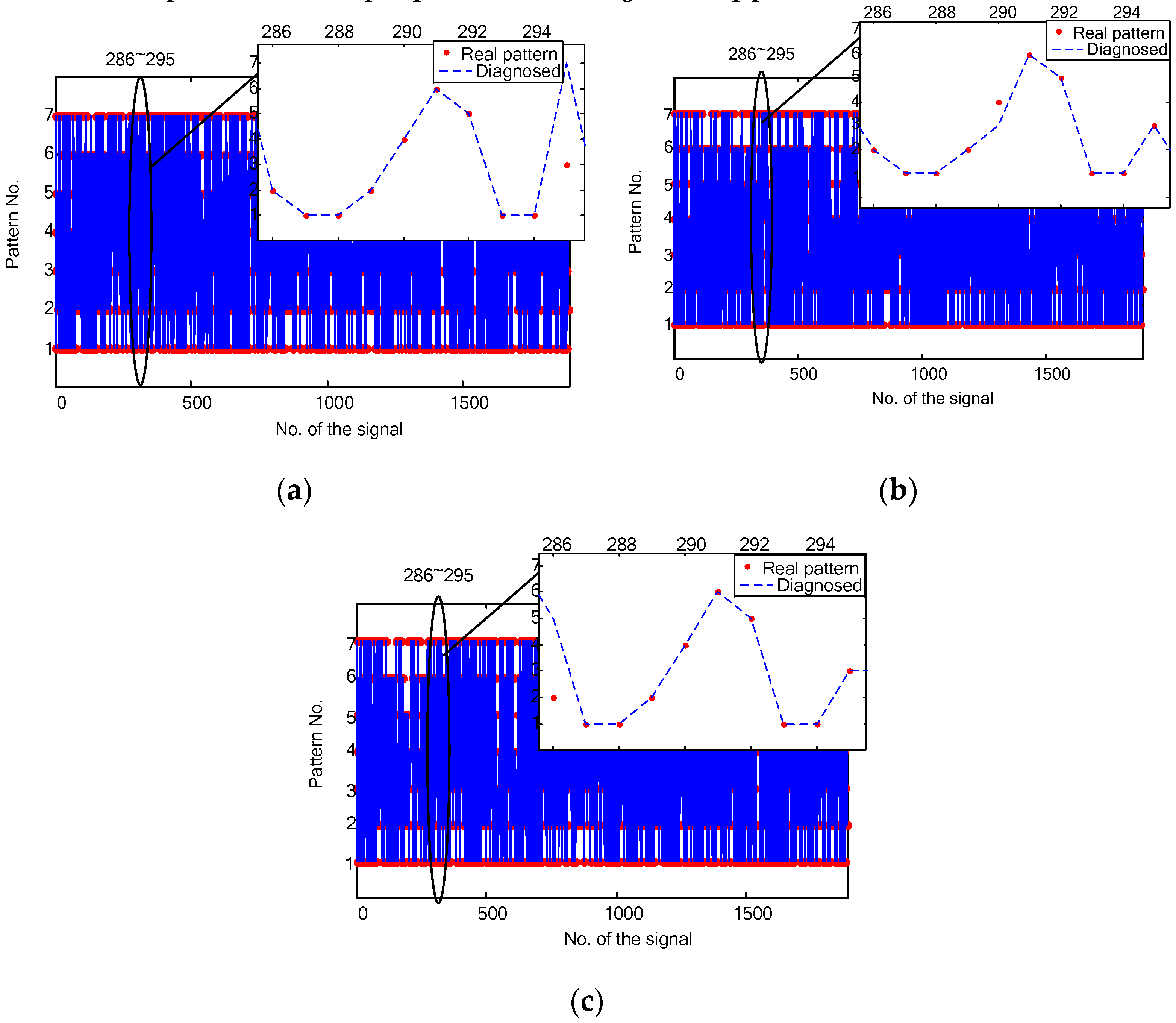
- Diagnose the rotating machinery condition using the trained GDBM model.
3. Data Collection Experiments for the Fault Diagnosis
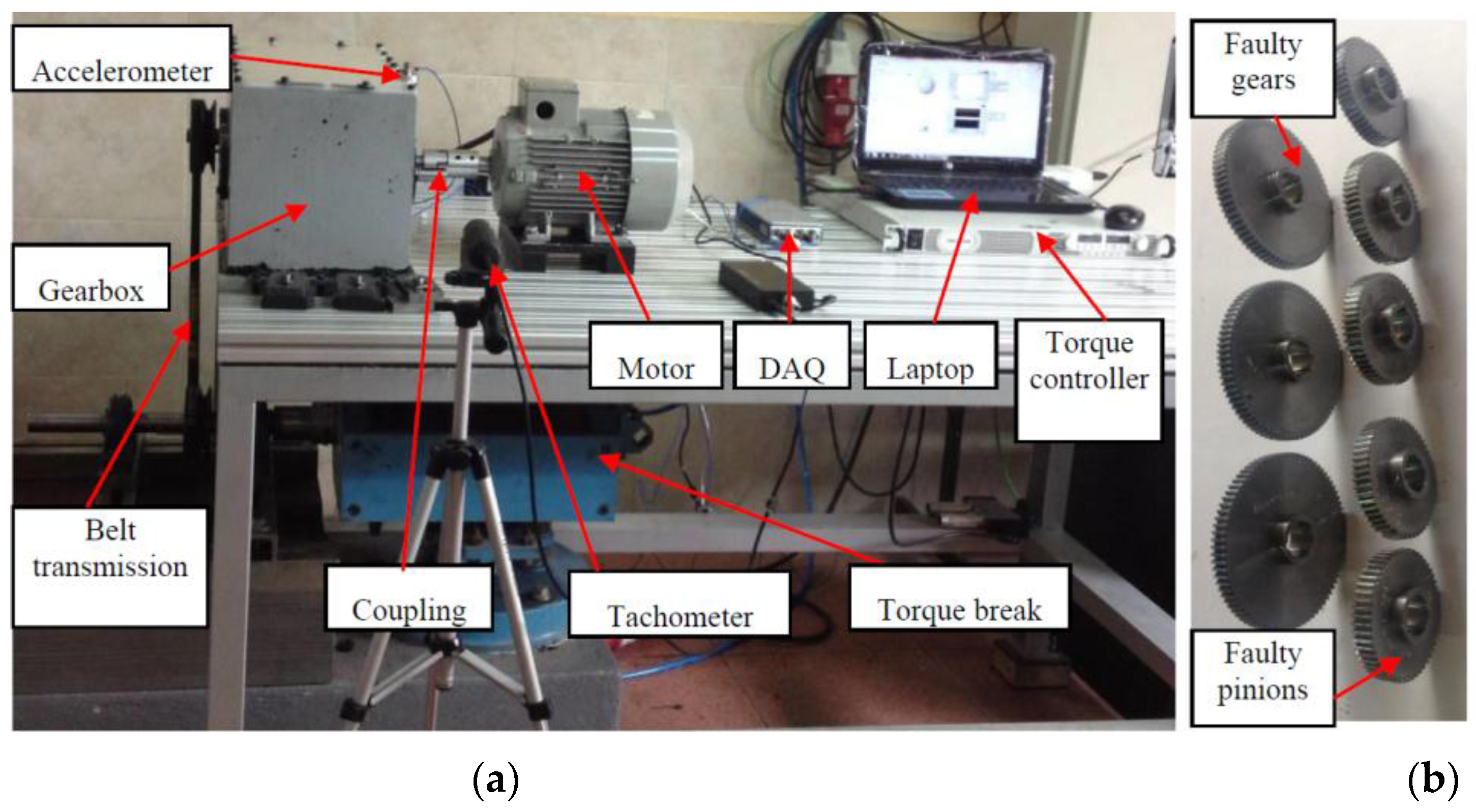
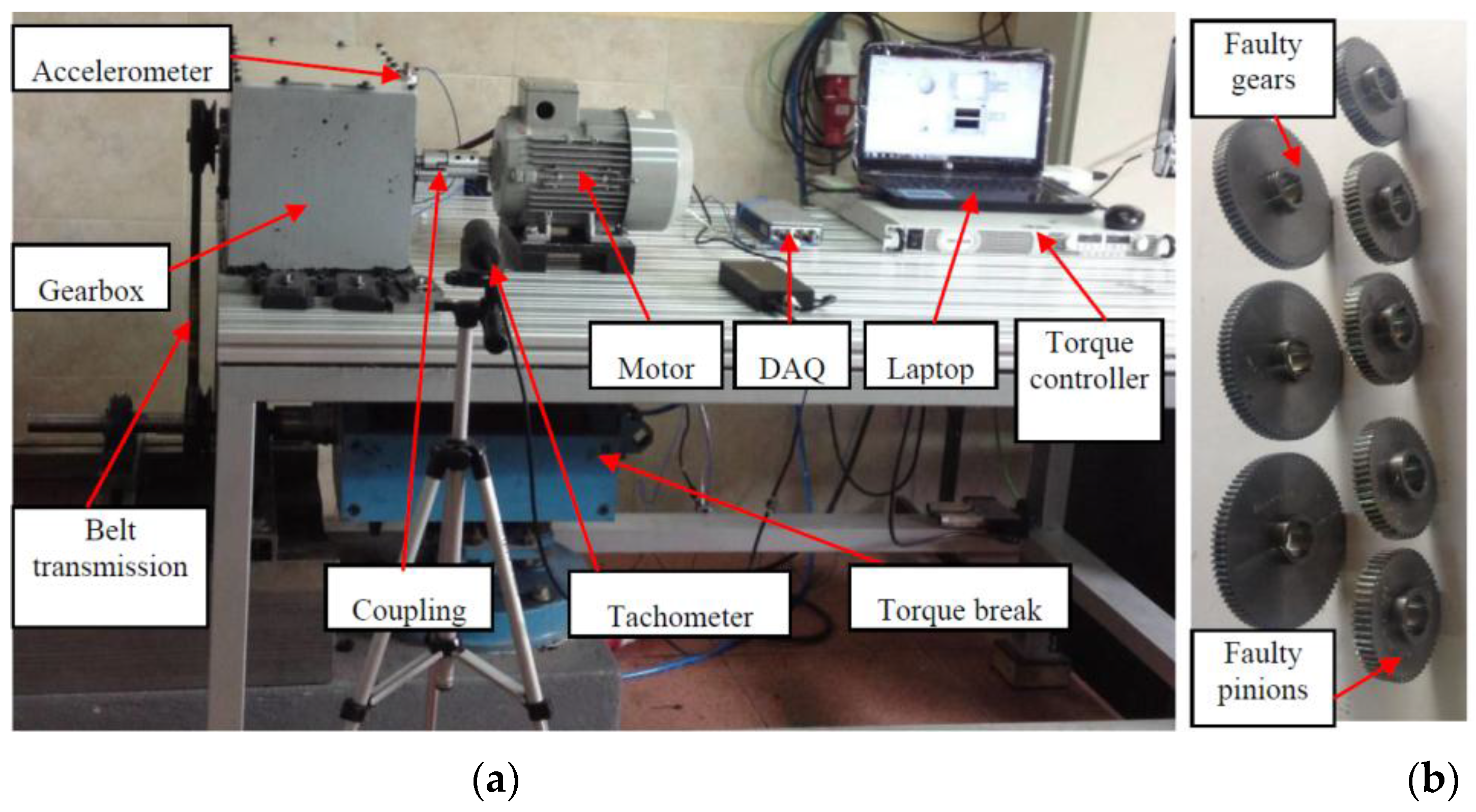
3.1. Experimental Procedure for Gearbox Fault Diagnosis
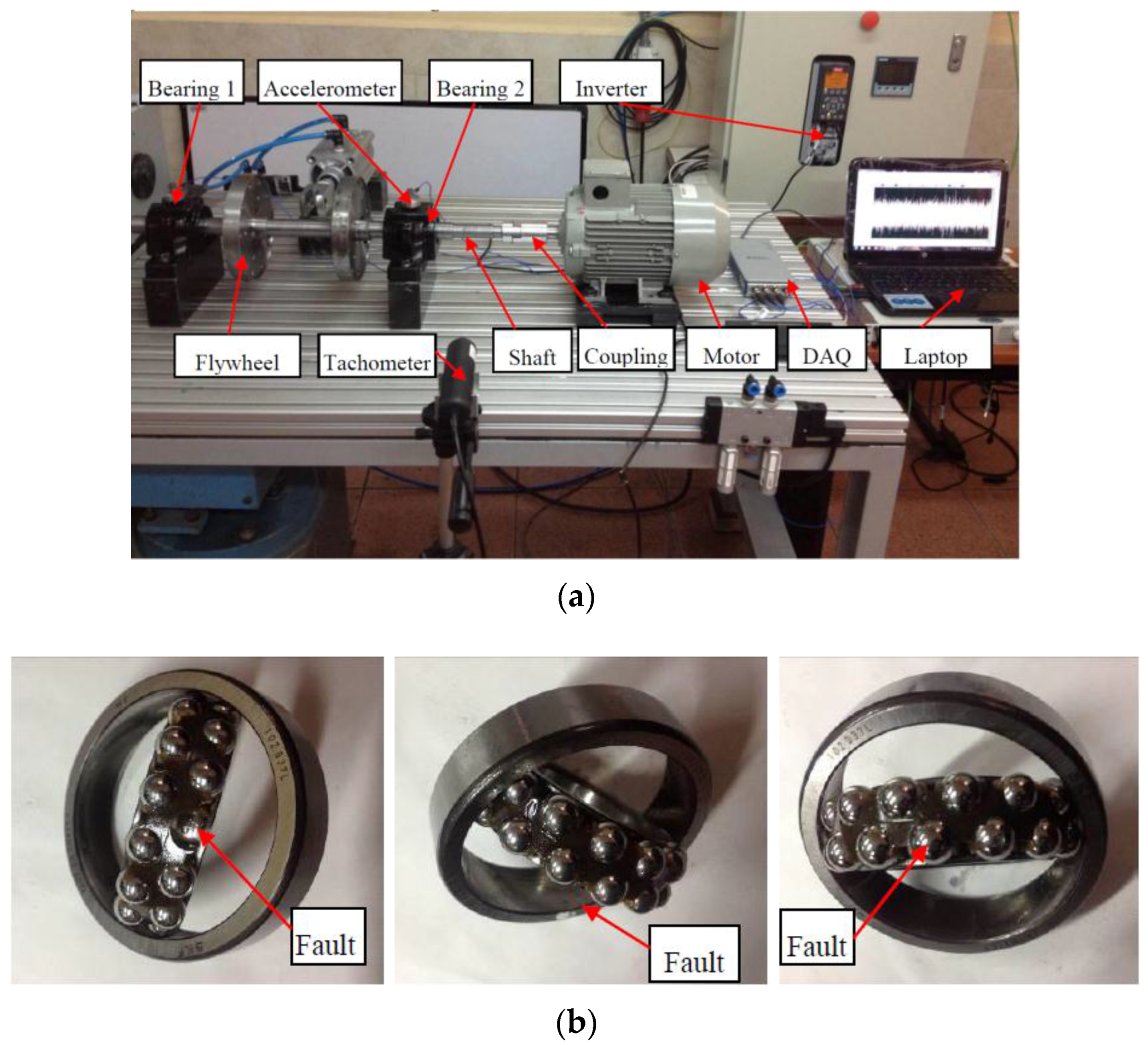
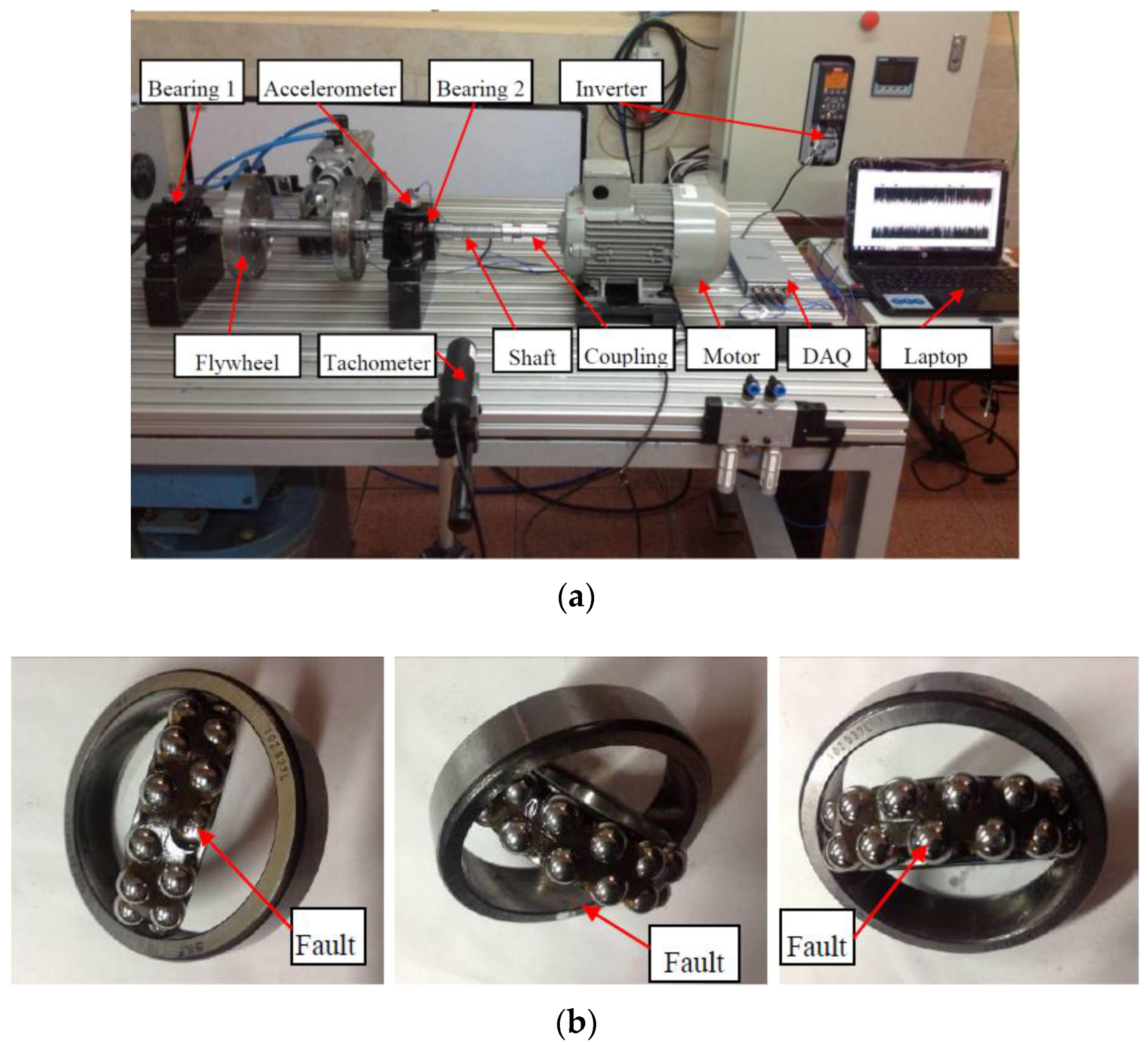
3.2. Experimental Procedure for Bearing Fault Diagnosis
4. Results and Discussion
4.1. Gearbox Fault Diagnosis Results
4.2. Bearing Fault Diagnosis Results
4.3. Remarks
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lei, Y.; Lin, J.; Zuo, M.J.; He, Z. Condition monitoring and fault diagnosis of planetary gearboxes: A review. Measurement 2014, 48, 292–305. [Google Scholar] [CrossRef]
- Li, C.; Liang, M. Time-frequency signal analysis for gearbox fault diagnosis using a generalized synchrosqueezing transform. Mech. Syst. Sig. Process. 2012, 26, 205–217. [Google Scholar] [CrossRef]
- Batista, L.; Badri, B.; Sabourin, R.; Thomas, M. A classifier fusion system for bearing fault diagnosis. Expert Syst. Appl. 2013, 40, 6788–6797. [Google Scholar] [CrossRef]
- Li, C.; Liang, M.; Wang, T. Criterion fusion for spectral segmentation and its application to optimal demodulation of bearing vibration signals. Mech. Syst. Sig. Process. 2015, 64–65, 132–148. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part II: Fault diagnosis with knowledge-based and hybrid/active-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Qin, Q.; Jiang, Z.N.; Feng, K.; He, W. A novel scheme for fault detection of reciprocating compressor valves based on basis pursuit wave matching and support vector machine. Measurement 2010, 45, 897–908. [Google Scholar] [CrossRef]
- Wong, W.K.; Loo, C.K.; Lim, W.S.; Tan, P.N. Thermal condition monitoring system using log-polar mapping, quaternion correlation and max-product fuzzy neural network classification. Neurocomputing 2010, 74, 164–177. [Google Scholar] [CrossRef]
- Arumugam, V.; Sidharth, A.A.P.; Santulli, C. Failure modes characterization of impacted carbon fibre reinforced plastics laminates under compression loading using acoustic emission. J. Compos. Mater. 2014, 48, 3457–3468. [Google Scholar] [CrossRef]
- Li, C.; Peng, J.; Liang, M. Enhancement of the wear particle monitoring capability of oil debris sensors using a maximal overlap discrete wavelet transform with optimal decomposition depth. Sensors 2014, 14, 6207–6228. [Google Scholar] [CrossRef] [PubMed]
- Raad, A.; Antoni, J.; Sidahmed, M. Indicators of cyclostationarity: Theory and application to gear fault monitoring. Mech. Syst. Sig. Process. 2008, 22, 574–587. [Google Scholar] [CrossRef]
- Bartelmus, W.; Zimroz, R. A new feature for monitoring the condition of gearboxes in non-stationary operating conditions. Mech. Syst. Sig. Process. 2009, 23, 1528–1534. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Sig. Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Li, C.; Liang, M. Continuous-scale mathematical morphology-based optimal scale band demodulation of impulsive feature for bearing defect diagnosis. J. Sound Vib. 2012, 331, 5864–5879. [Google Scholar] [CrossRef]
- Zuo, M.J.; Lin, J.; Fan, X. Feature separation using ICA for a one-dimensional time series and its application in fault detection. J. Sound Vib. 2005, 287, 614–624. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, M. Outer race defect width measurement in taper roller bearing using discrete wavelet transform of vibration signal. Measurement 2013, 46, 537–545. [Google Scholar] [CrossRef]
- Shen, C.; Wang, D.; Kong, F.; Tse, P.W. Fault diagnosis of rotating machinery based on the statistical parameters of wavelet packet paving and a generic support vector regressive classifier. Measurement 2013, 46, 1551–1564. [Google Scholar] [CrossRef]
- Cao, H.; Chen, X.; Zi, Y.; Ding, F.; Chen, H.; Tan, J.; He, Z. End milling tool breakage detection using lifting scheme and Mahalanobis distance. Int. J. Mach. Tools Manuf. 2008, 48, 141–151. [Google Scholar] [CrossRef]
- Wang, D.; Tse, P.W.; Guo, W.; Miao, Q. Support vector data description for fusion of multiple health indicators for enhancing gearbox fault diagnosis and prognosis. Meas. Sci. Technol. 2011, 22, 025102. [Google Scholar] [CrossRef]
- Li, C.; Cabrera, D.; Valente de Oliveira, J.; Sanchez, R.V.; Cerrada, M.; Zurita, G. Extracting repetitive transients for rotating machinery diagnosis using multiscale clustered grey infogram. Mech. Syst. Sig. Process. 2016, 76–77, 157–173. [Google Scholar] [CrossRef]
- Li, C.; Sanchez, V.; Zurita, G.; Lozada, M.C.; Cabrera, D. Rolling element bearing defect detection using the generalized synchrosqueezing transform guided by time-frequency ridge enhancement. ISA Trans. 2016, 60, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Lei, Y.; Kong, D.; Lin, J.; Zuo, M.J. Fault detection of planetary gearboxes using new diagnostic parameters. Meas. Sci. Technol. 2012, 23, 055605. [Google Scholar] [CrossRef]
- Cerrada, M.; Sánchez, R.V.; Cabrera, D.; Zurita, G.; Li, C. Multi-stage feature selection by using genetic algorithms for fault diagnosis in gearboxes based on vibration signal. Sensors 2015, 15, 23903–23926. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.; Tang, B.; Chen, R. A novel fault diagnosis model for gearbox based on wavelet support vector machine with immune genetic algorithm. Measurement 2013, 46, 220–232. [Google Scholar] [CrossRef]
- Zhao, M.; Jin, X.; Zhang, Z.; Li, B. Fault diagnosis of rolling element bearings via discriminative subspace learning: visualization and classification. Expert Syst. Appl. 2014, 41, 3391–3401. [Google Scholar] [CrossRef]
- Tayarani-Bathaie, S.S.; Vanini, Z.N.S.; Khorasani, K. Dynamic neural network-based fault diagnosis of gas turbine engines. Neurocomputing 2014, 125, 153–165. [Google Scholar] [CrossRef]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar]
- Tamilselvan, P.; Wang, P. Failure diagnosis using deep belief learning based health state classification. Reliab. Eng. Syst. Saf. 2013, 115, 124–135. [Google Scholar] [CrossRef]
- Tran, V.T.; Thobiani, F.A.; Ball, A. An approach to fault diagnosis of reciprocating compressor valves using Teager-Kaiser energy operator and deep belief networks. Expert Syst. Appl. 2014, 41, 4113–4122. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, G.; Liang, L.; Jiang, K. Detection of weak transient signals based on wavelet packet transform and manifold learning for rolling element bearing fault diagnosis. Mech. Syst. Sig. Process. 2015, 54–55, 259–276. [Google Scholar] [CrossRef]
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Aerospace and Automotive Applications; John Wiley & Sons: Chichester, UK, 2011. [Google Scholar]
- Li, C.; Sanchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D.; Vásquez, R.E. Multimodal deep support vector classification with homologous features and its application to gearbox fault diagnosis. Neurocomputing 2015, 168, 119–127. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed]
- Hjelma, D.; Calhouna, V.; Salakhutdinov, R.; Allena, E.; Adali, T.; Plisa, S. Restricted Boltzmann machines for neuroimaging: An application in identifying intrinsic networks. Neuroimage 2014, 96, 245–260. [Google Scholar] [CrossRef] [PubMed]
- Cho, K.H.; Ilin, A.; Raiko, T. Improved Learning of Gaussian-Bernoulli Restricted Boltzmann Machines. In Artificial Neural Networks and Machine Learning—ICANN 2011; Springer Berlin Heidelberg: Berlin, Germany, 2011; Volume 6791, pp. 10–17. [Google Scholar]
- Salakhutdinov, R. Learning Deep Generative Models. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- Hastie, T.; Tibshirani, R. Classification by Pairwise Coupling. In Advances in Neural Information Processing Systems 10; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Cho, K.H.; Raiko, T.; Ilin, A. Gaussian-Bernoulli deep Boltzmann machine. In Proceedings of the 2013 International Joint Conference on Neural Networks, Dallas, TX, USA, 4–9 August 2013; pp. 1–7.
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Salakhutdinov, R. Learning in Markov Random Fields Using Tempered Transitions. In Advances in Neural Information Processing Systems 22; MIT Press: Cambridge, MA, USA, 2009; pp. 1598–1606. [Google Scholar]
- Bishop, C.M. Neural Networks for Pattern Recognition; Clarendon Press: Oxford, UK, 1996. [Google Scholar]
- Nabney, I.T. NETLAB: Algorithms for Pattern Recognition; Springer-Verlag: London, UK, 2001. [Google Scholar]
- Hinton, G.E.; Osindero, S.; The, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Khomfoi, S.; Tolbert, L.M. Fault diagnostic system for a multilevel inverter using a neural network. IEEE Trans. Power Electron. 2007, 22, 1062–1069. [Google Scholar] [CrossRef]
- Bartkowiak, A.; Zimroz, R. Outliers analysis and one class classification approach for planetary gearbox diagnosis. J. Phys. Conf. Ser. 2011, 305, 012031. [Google Scholar] [CrossRef]
- Souza, D.L.; Granzotto, M.H.; Almeida, G.M.; Oliveira-Lopes, L.C. Fault detection and diagnosis using support vector machines—A SVC and SVR comparison. J. Saf. Eng. 2014, 3, 18–29. [Google Scholar] [CrossRef]
- Hou, S.; Li, Y.; Wang, Z. A resonance demodulation method based on harmonic wavelet transform for rolling bearing fault diagnosis. Struct. Health Monit. 2010, 9, 297–308. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G.E. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Setup | Pattern Label | Component 1 | Component 2 | Load |
|---|---|---|---|---|
| Gearbox (component 1-pinion; component 2-gear) | A | Normal | Normal | zero, small, great |
| B | Chaffing tooth | Normal | zero, small, great | |
| C | Worn tooth | Normal | zero, small, great | |
| D | Chipped tooth 25% | Normal | zero, small, great | |
| E | Chipped tooth 50% | Normal | zero, small, great | |
| F | Missing tooth | Normal | zero, small, great | |
| G | Normal | Chipped tooth 25% | zero, small, great | |
| H | Normal | Chipped tooth 50% | zero, small, great | |
| I | Normal | Missing tooth | zero, small, great | |
| J | Chipped tooth 25% | Chipped tooth 25% | zero, small, great | |
| Bearing (component 1-bearing 1; component 2-bearing 2) | 1 | Normal | Normal | Zero, 1, 2 flywheel(s) |
| 2 | Normal | Inner race fault | Zero, 1, 2 flywheel(s) | |
| 3 | Normal | Outer race fault | Zero, 1, 2 flywheel(s) | |
| 4 | Normal | Ball fault | Zero, 1, 2 flywheel(s) | |
| 5 | Outer race fault | Inner race fault | Zero, 1, 2 flywheel(s) | |
| 6 | Ball fault | Inner race fault | Zero, 1, 2 flywheel(s) | |
| 7 | Ball fault | Outer race fault | Zero, 1, 2 flywheel(s) |
| Device (N) | Domain (d) | Fault Diagnosis Model | ||||
|---|---|---|---|---|---|---|
| #1 Peer | GDBM | #2 Peer | #3 Peer | Average a | ||
| Gearbox | Time domain | 26.08 | 62.58 | 60.83 | 35.83 | 46.33 |
| Frequency domain | 52.67 | 91.75 | 52.83 | 79.42 | 69.17 | |
| Time-frequency domain | 45.25 | 95.17 | 69.50 | 78.42 | 72.09 | |
| Average b | 41.33 | 83.17 | 61.05 | 64.56 | 62.53 | |
| Bearing | Time domain | 18.52 | 60.63 | 59.58 | 41.96 | 45.17 |
| Frequency domain | 39.95 | 87.57 | 80.74 | 82.91 | 72.79 | |
| Time-frequency domain | 58.84 | 91.75 | 81.53 | 82.70 | 78.71 | |
| Average b | 39.10 | 79.98 | 73.95 | 69.19 | 65.508 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Sánchez, R.-V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning. Sensors 2016, 16, 895. https://doi.org/10.3390/s16060895
Li C, Sánchez R-V, Zurita G, Cerrada M, Cabrera D. Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning. Sensors. 2016; 16(6):895. https://doi.org/10.3390/s16060895
Chicago/Turabian StyleLi, Chuan, René-Vinicio Sánchez, Grover Zurita, Mariela Cerrada, and Diego Cabrera. 2016. "Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning" Sensors 16, no. 6: 895. https://doi.org/10.3390/s16060895
APA StyleLi, C., Sánchez, R.-V., Zurita, G., Cerrada, M., & Cabrera, D. (2016). Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning. Sensors, 16(6), 895. https://doi.org/10.3390/s16060895