
Measurement Sensitivity Improvement of All-Optical Atomic Spin Magnetometer by Suppressing Noises


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
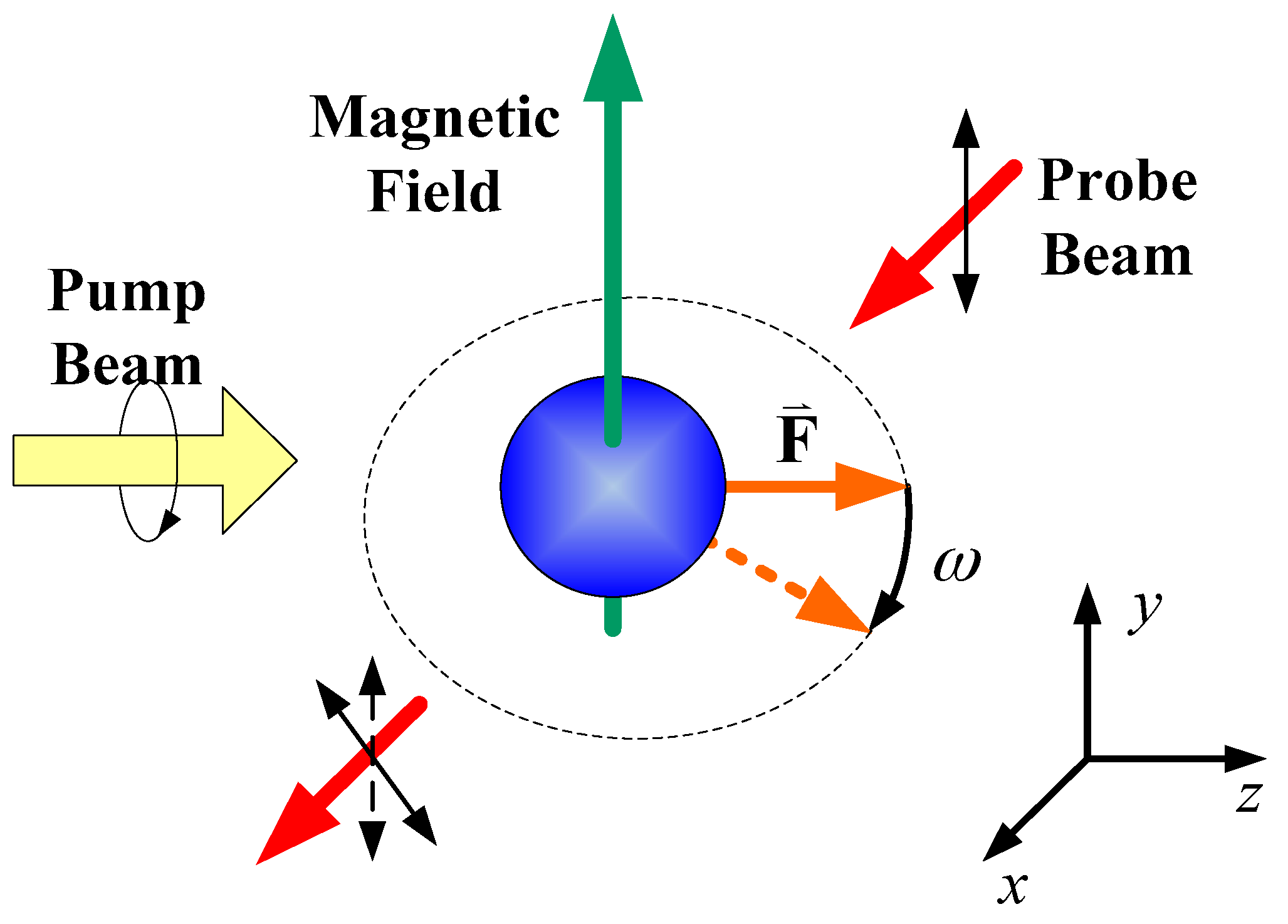
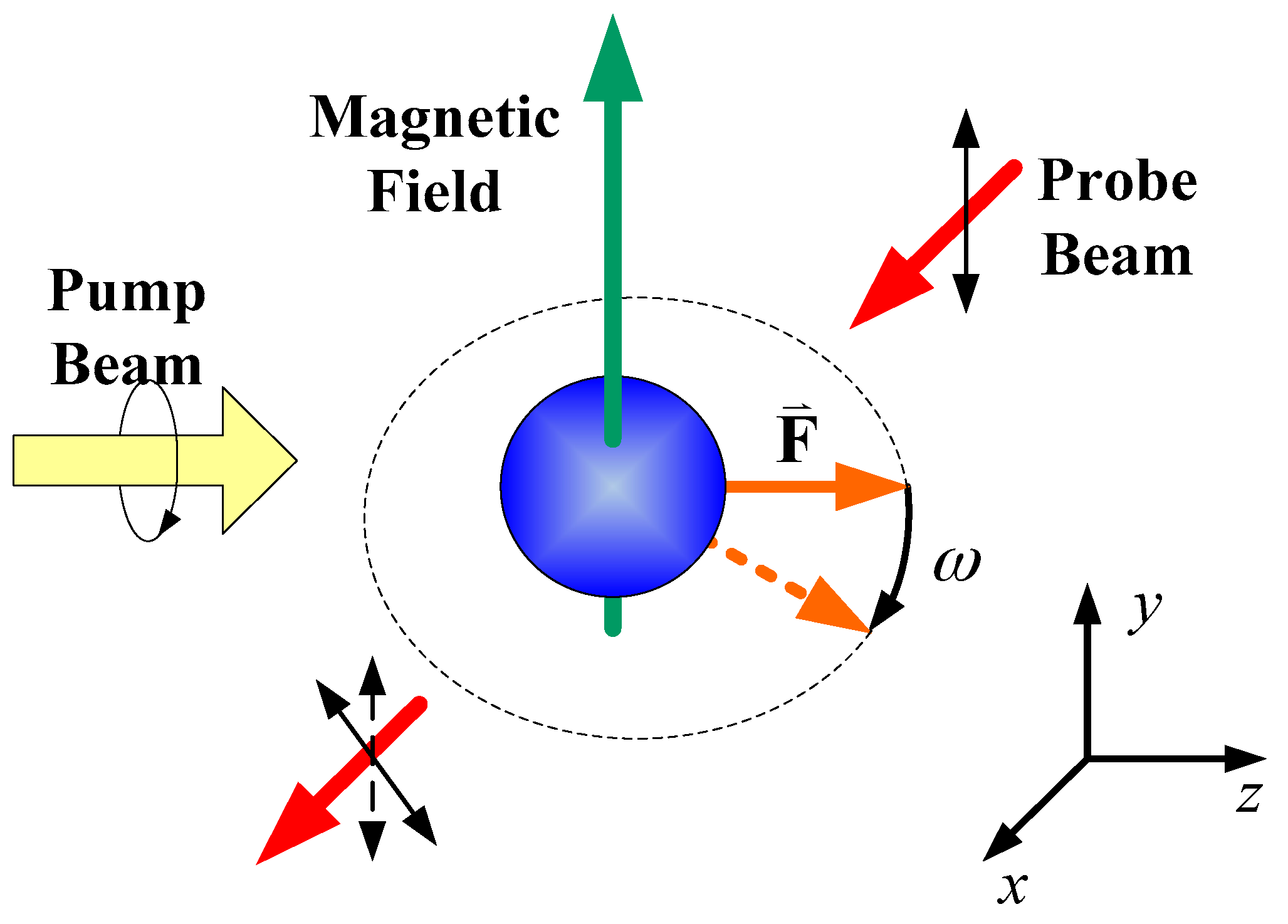
2. Principle of Atomic Spin Magnetometer
3. Output Signal of SERF Atomic Spin Magnetometer
3.1. Output Signal of SERF Atomic Spin Magnetometer
3.2. Noises Influencing on Performance of SERF Atomic Spin Magnetometer
3.2.1. Magnetic Field Noise
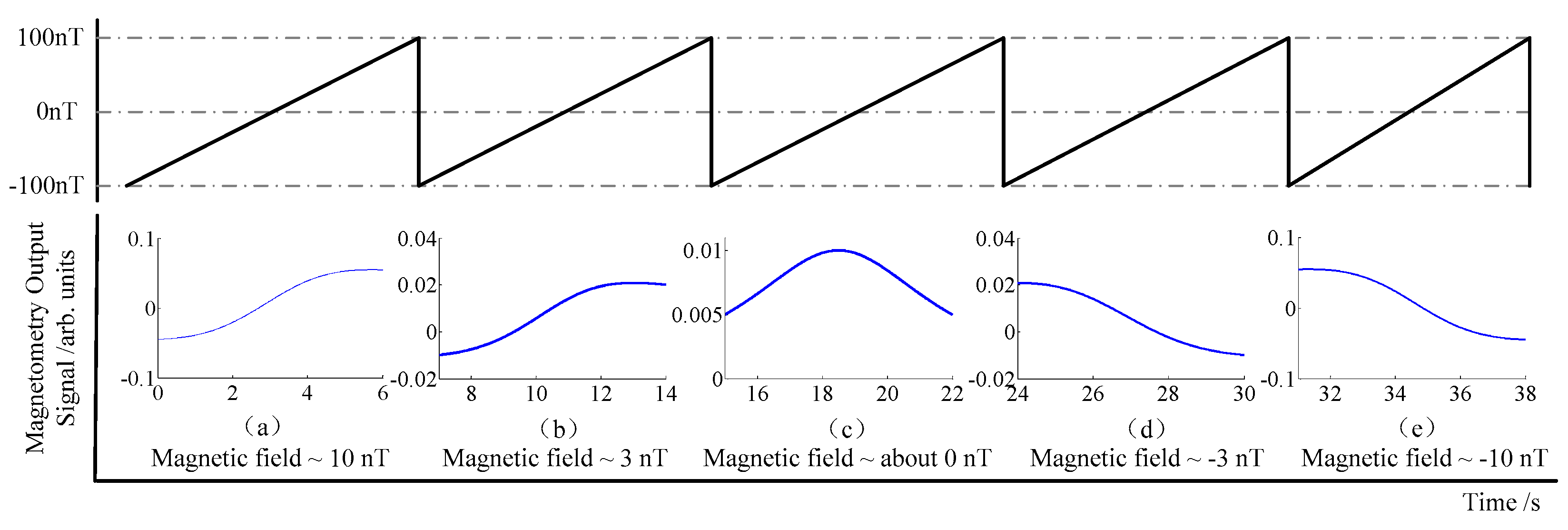
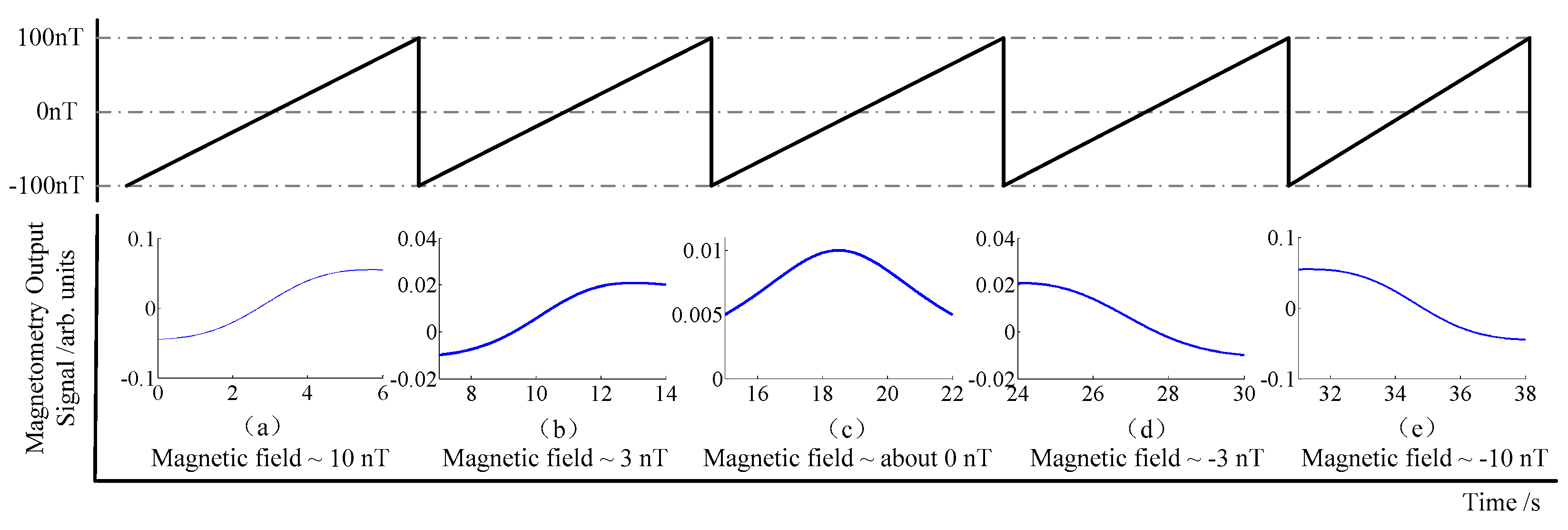
- During the simulation process, the residual magnetic field in the x direction is assumed as 10 nT, as shown in Figure 3a. A changing magnetic field from −100 nT to 100 nT is scanning in the z direction, meanwhile, the offset of the magnetic field in the x direction needs to be adjusted synchronously. By observing the output signal, it can be known that if the residual magnetic field in the shielding is counteracted gradually, the output signal will reduce, as shown in Figure 3b; otherwise, the output signal will increase. Continue to adjust the offset of the magnetic field in the x direction until the output signal reaches the minimum value, as shown in Figure 3c. After passing through this minimum value, the pattern of the output signal overturns, presently, the signal’s amplitude increases gradually, as shown in Figure 3d,e, respectively. The minimum value of the output signal is considered as the compensation point in the x direction.
- In a similar way, the scanning field condition of the z direction is kept invariant and the offset of the magnetic field in the y direction adjusted to achieve the minimum output value in this direction.
- After compensating the magnetic field in the x and y directions by using steps 1 and 2, a scanning field sawtooth wave from −100 nT to 100 nT is applied to the x direction. The offsets of the magnetic field in the z and y directions are adjusted until the minimum output values are achieved, respectively.
- Steps 1 to 3 are repeated until the offset values of three directions are approximately constant. By using this compensation method, the residual magnetic field in the three directions can be counteracted, and the residual magnetic field noise can also be suppressed.
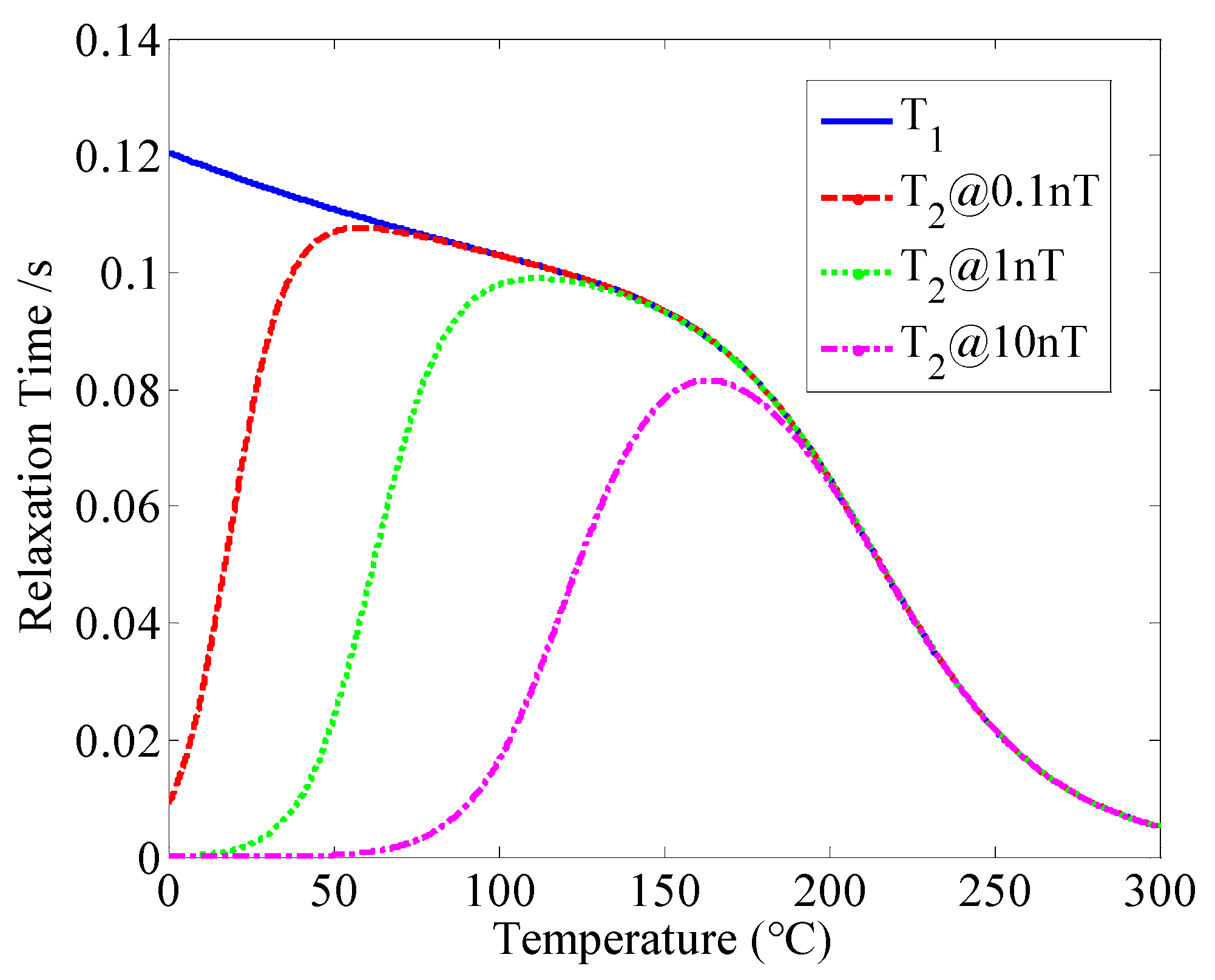
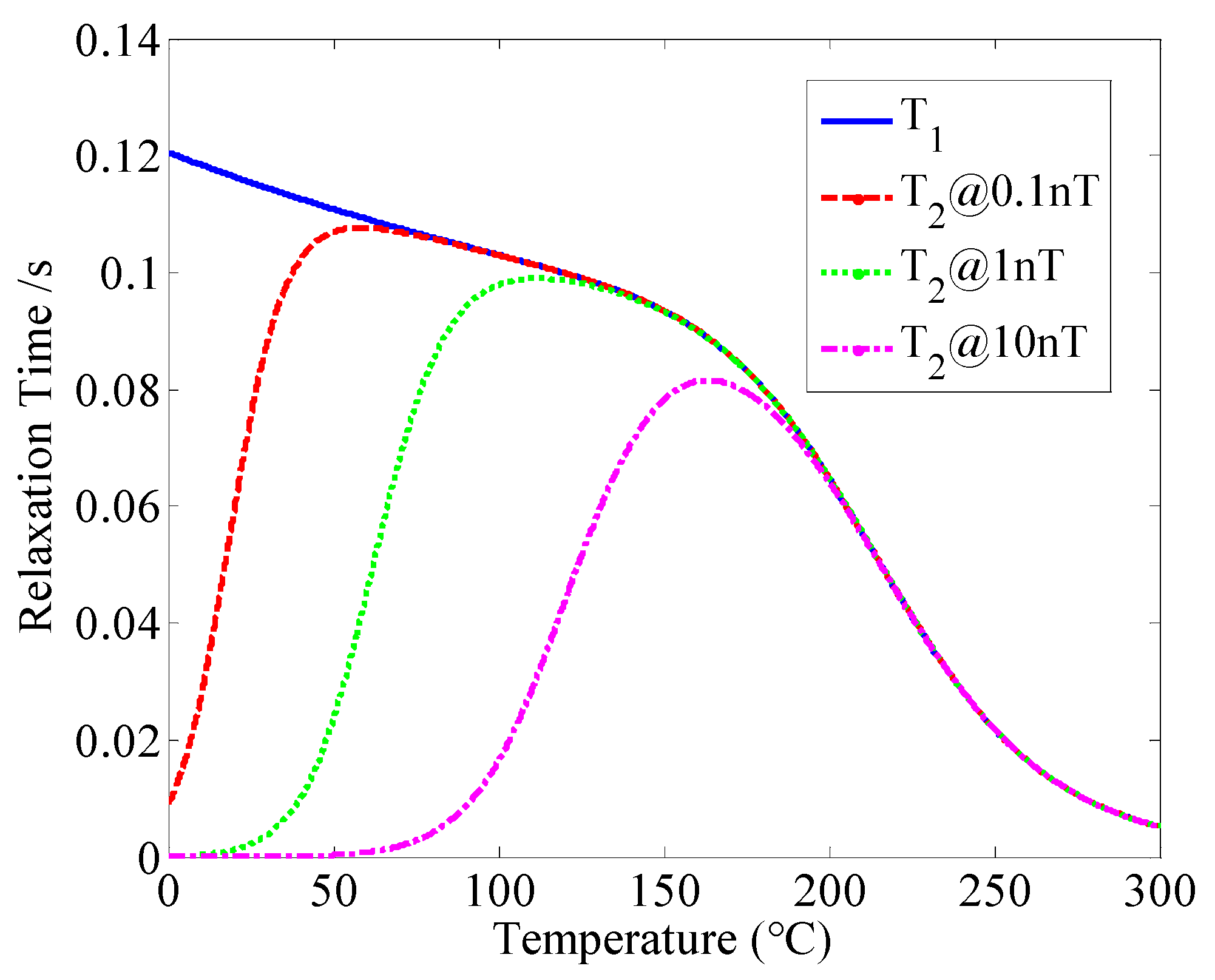
3.2.2. Temperature Optimization
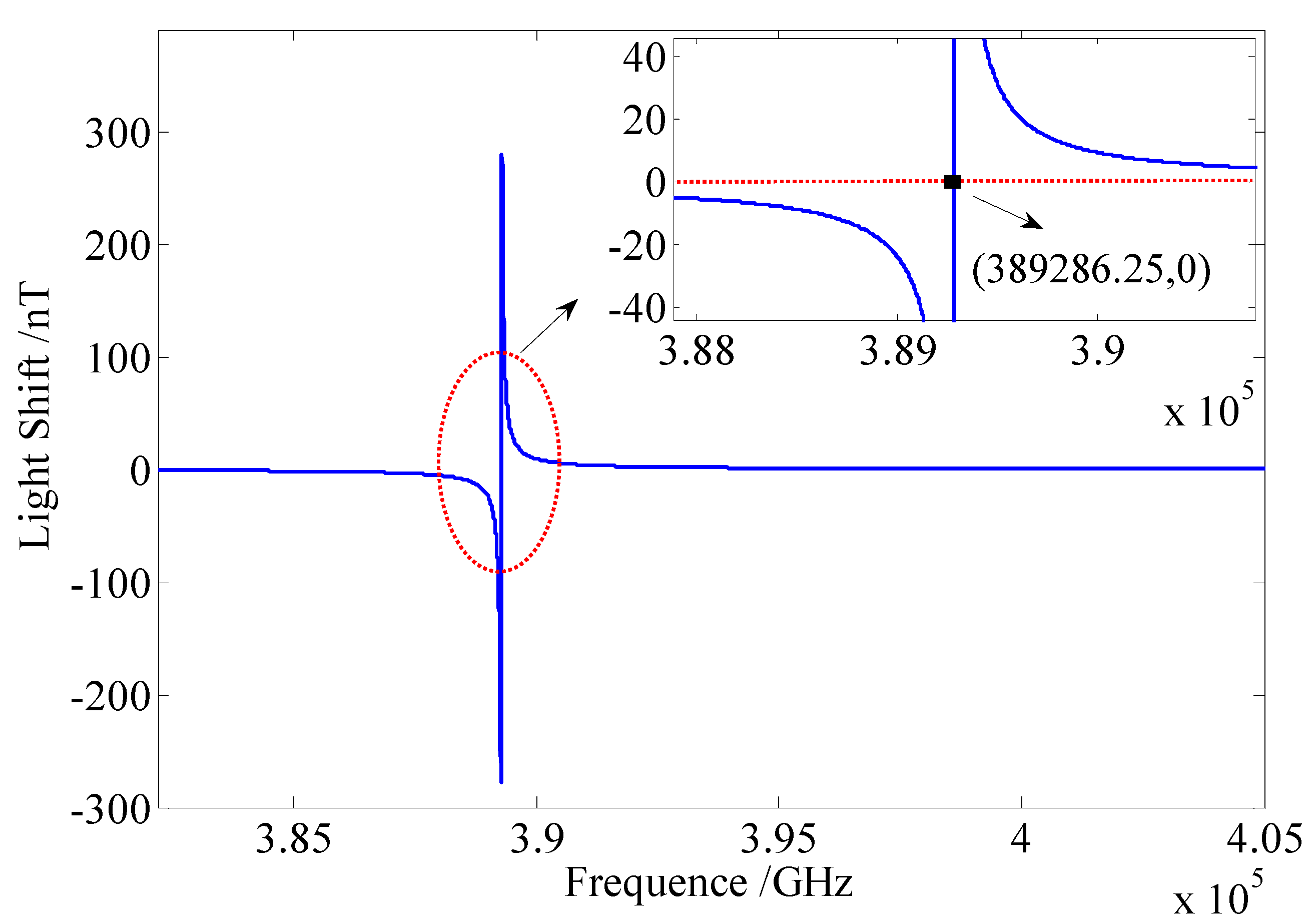
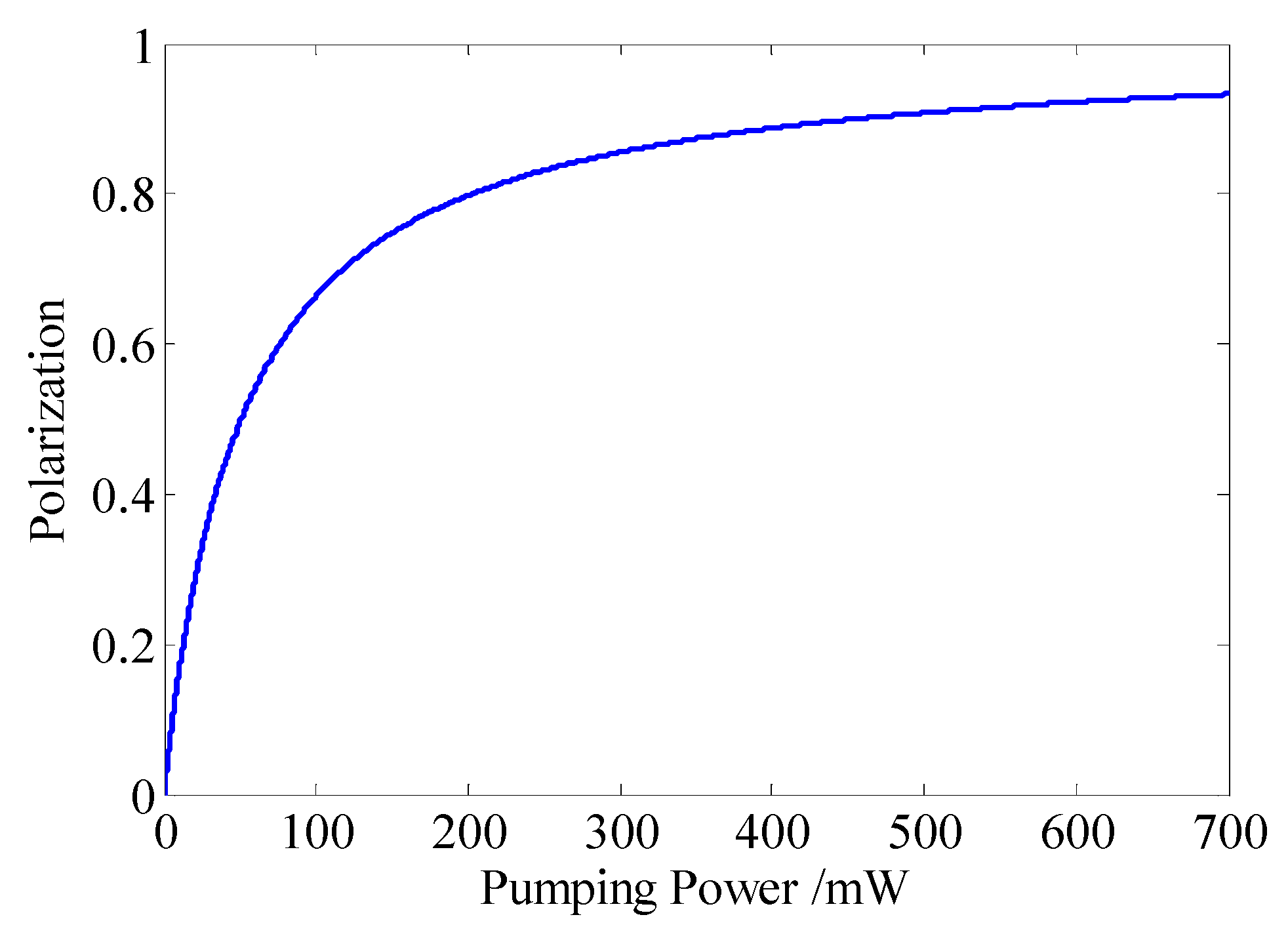
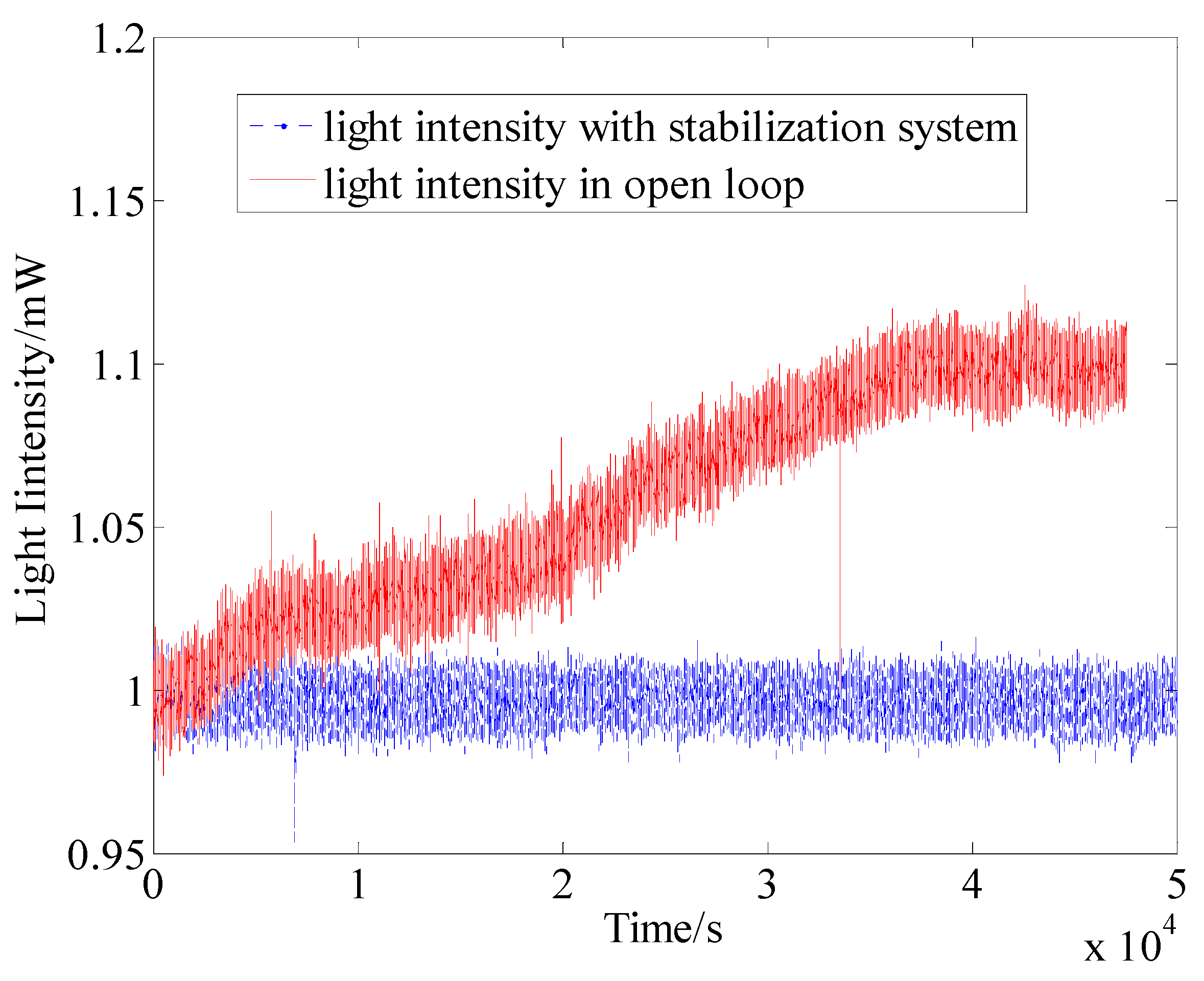
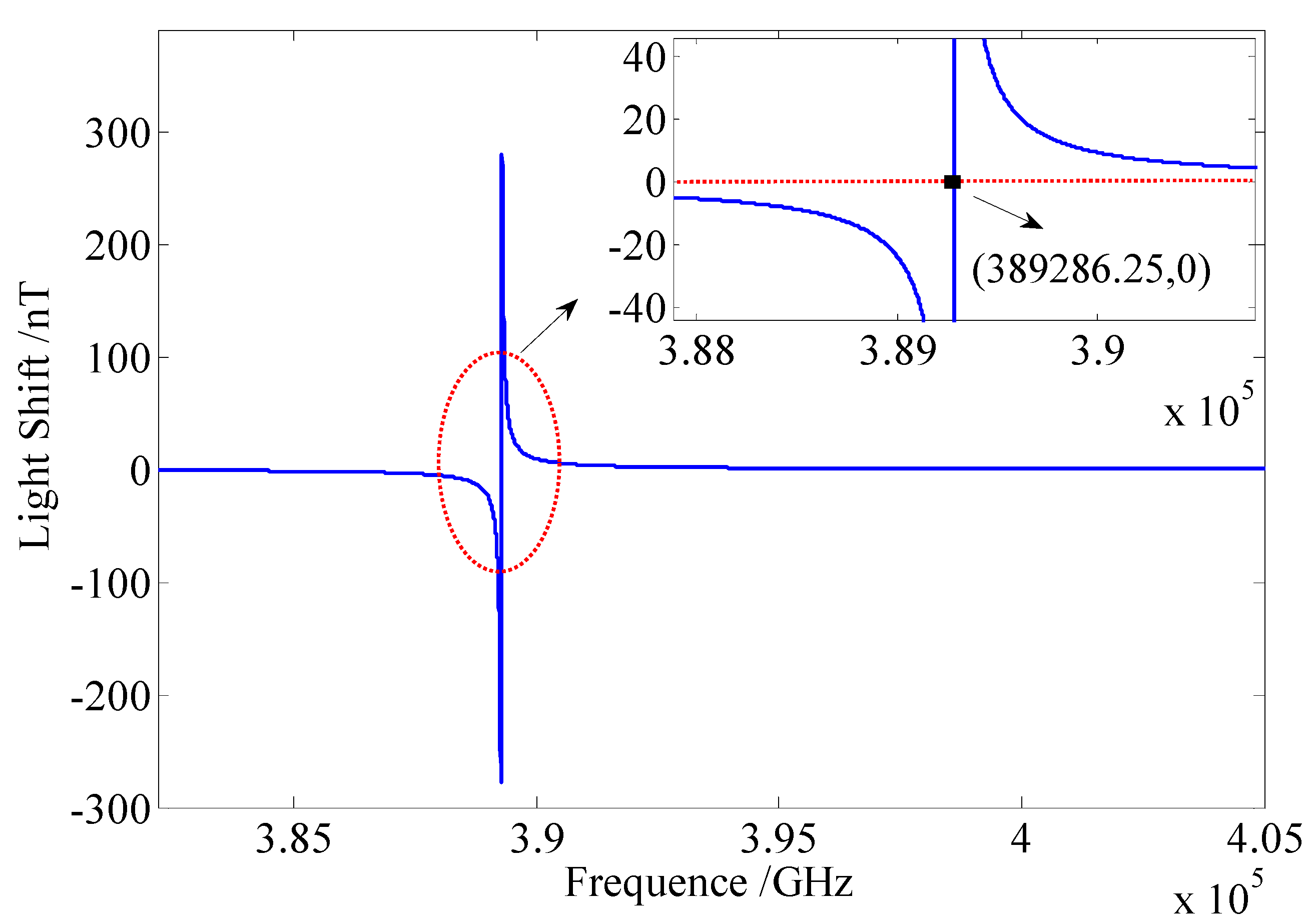
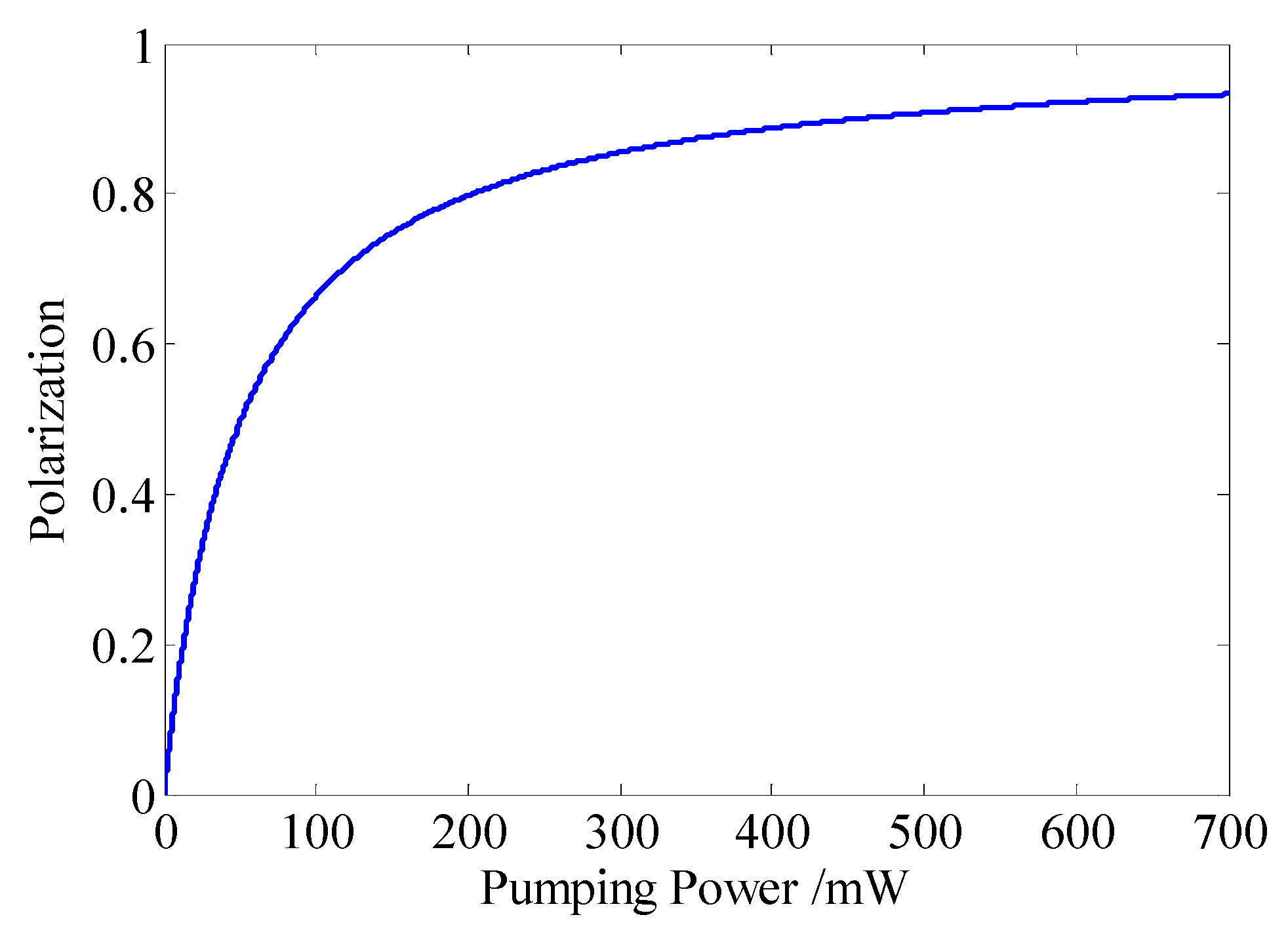
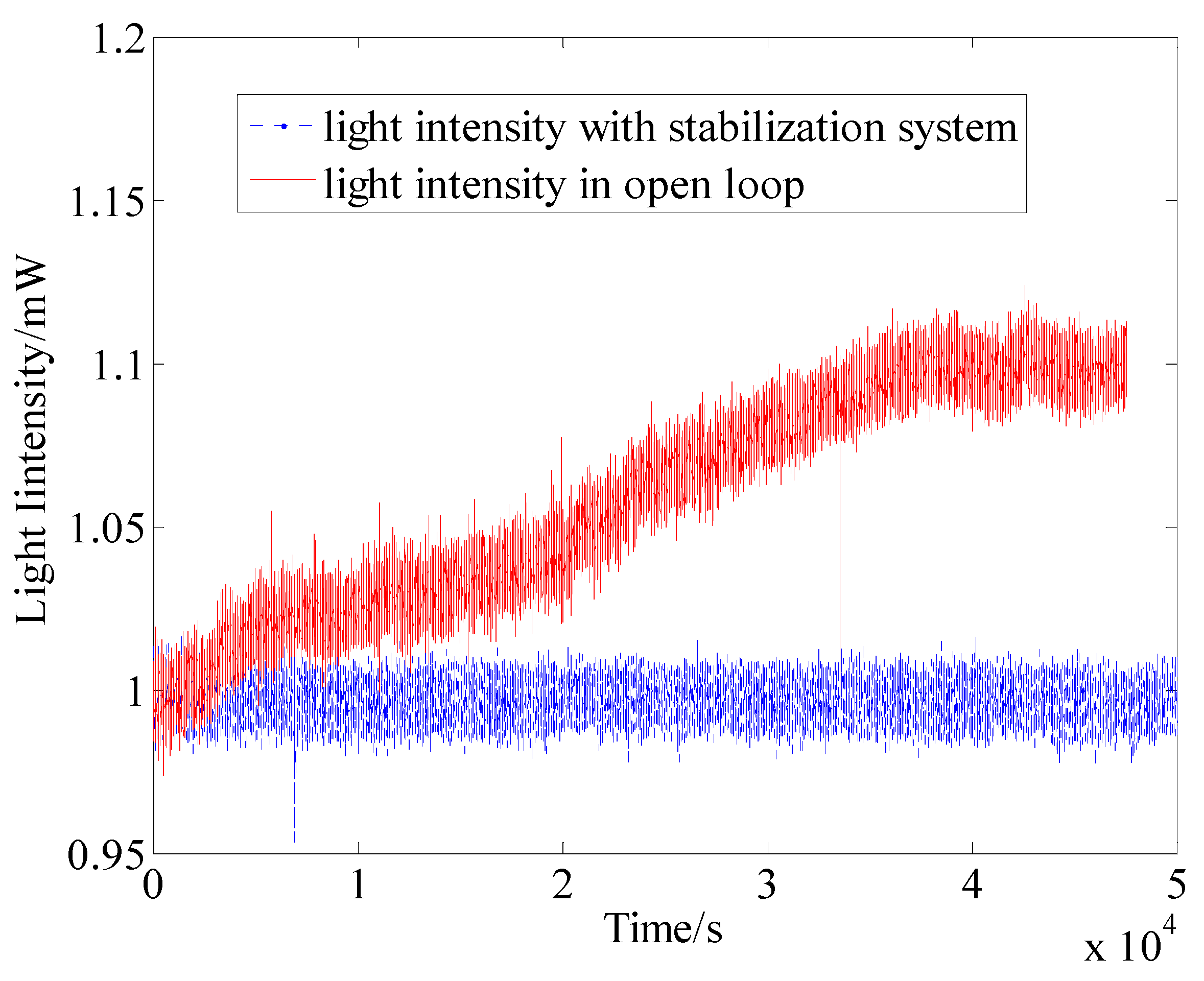
3.2.3. Light Field Noise
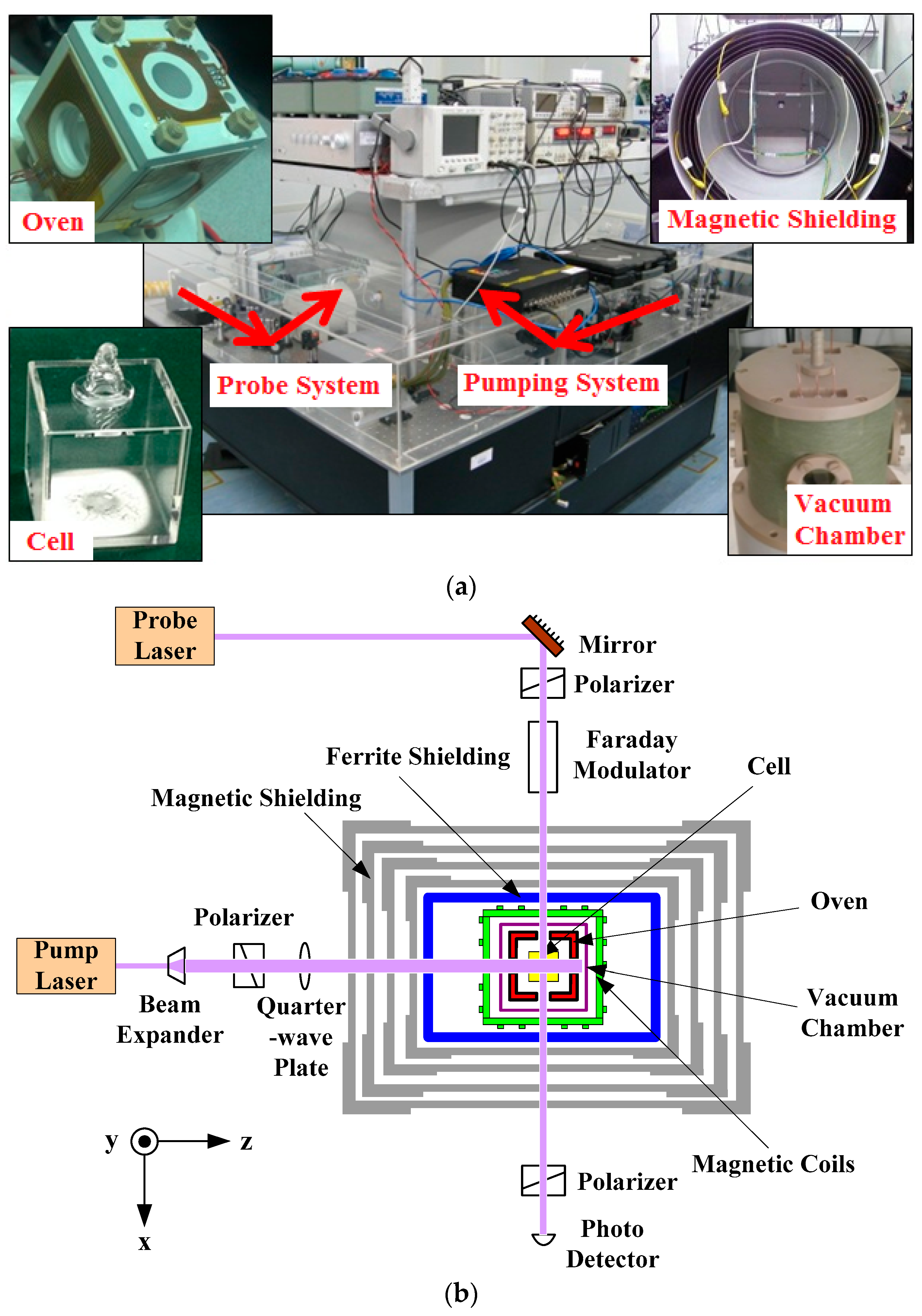
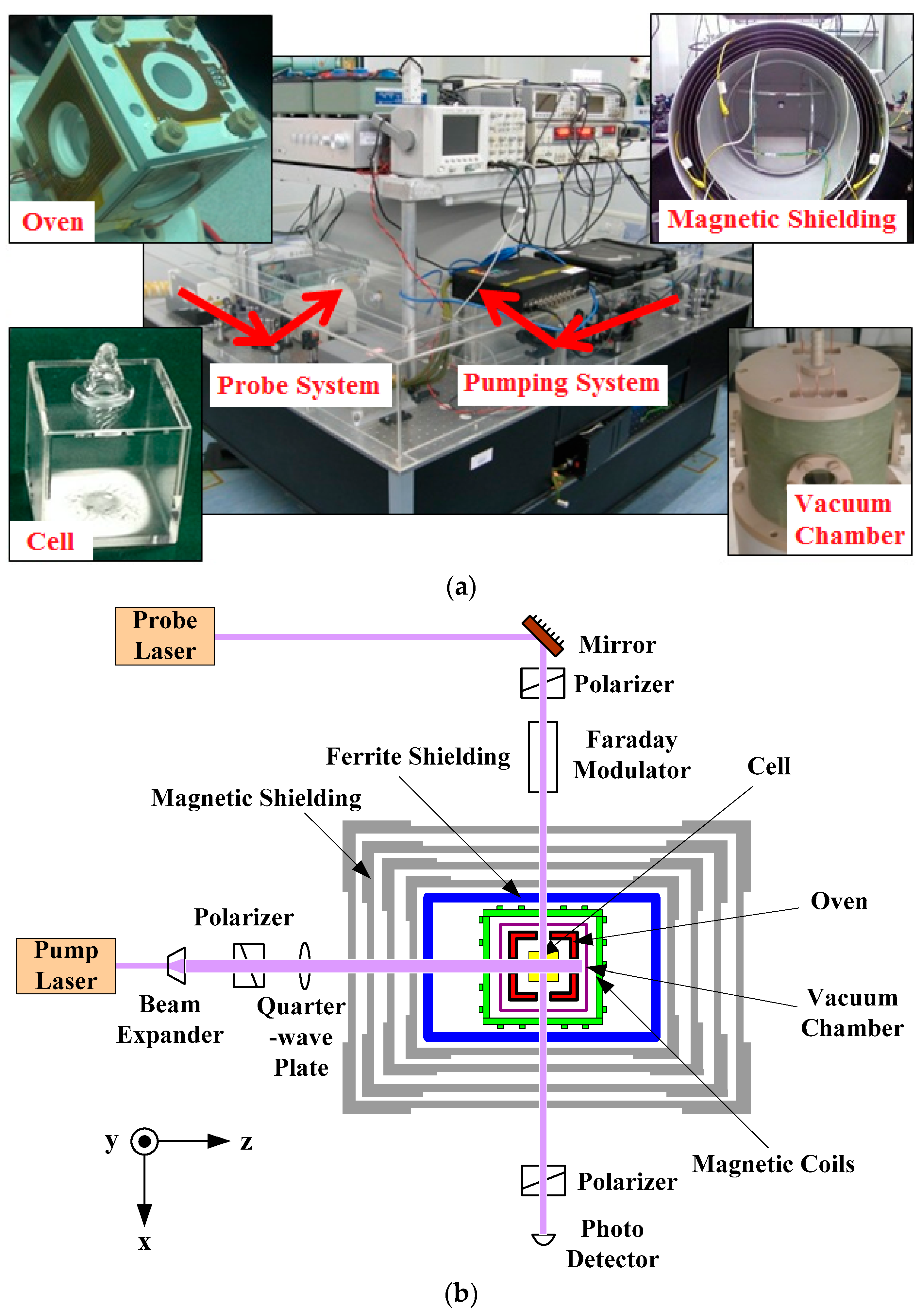
4. Experimental and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ito, Y.; Ohnishi, H.; Kamada, K.; Kobayashi, T. Development of an optically pumped atomic magnetometer using a K-Rb hybrid cell and its application to magnetocardiography. AIP Adv. 2012, 2, 1–5. [Google Scholar] [CrossRef]
- Sander, T.H.; Preusser, J.; Mhaskar, R.; Kitching, J.; Trahms, L.; Knappe, S. Magnetoencephalography with a chip-scale atomic magnetometer. Biomed. Opt. Express 2012, 3, 981–990. [Google Scholar] [CrossRef] [PubMed]
- Savukov, I.M.; Zotev, V.S.; Volegov, P.L.; Espy, M.A.; Matlashov, A.N.; Gomez, J.J.; Kraus, R.H. MRI with an atomic magnetometer suitable for practical imaging applications. J. Magn. Reson. 2009, 199, 188–191. [Google Scholar] [CrossRef] [PubMed]
- Savukov, I.; Karaulanov, T. Anatomical MRI with an atomic magnetometer. J. Magn. Reson. 2013, 231, 9–45. [Google Scholar] [CrossRef] [PubMed]
- Tiporlini, V.; Alameh, K. High sensitivity optically pumped quantum magnetometer. Sci. World J. 2013, 2013, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Jiménez-Martínez, R.; Knappe, S.; Kitching, J. An optically modulated zero-field atomic magnetometer with suppressed spin-exchange broadening. Rev. Sci. Instrum. 2014, 85, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Baranga, A.B.A.; Hoffman, D.; Xia, H.; Romalis, M.V. An atomic magnetometer for brain activity imaging. IEEE 2005, 5, 417–718. [Google Scholar]
- Robert, W.I. The Development of a Multichannel Atomic Magnetometer Array for Fetal Magnetocardiography; University of Wisconsin: Madison, WI, USA, 2012. [Google Scholar]
- Brown, J.M. A New Limit on Lorentz- and CPT-Violating Neutron Spin Interactions Using a K-3He Comagnetometer; University of Princeton: Princeton, NJ, USA, 2011. [Google Scholar]
- Moi, L.; Cartaleva, S. Sensitive magnetometers based on dark states. Europhys. News 2012, 43, 24–27. [Google Scholar] [CrossRef]
- Zhang, H.; Zou, S.; Chen, X.; Li, Y. Research on the influence of alkali polarization on an all-optical atomic spin magnetometer based on hybrid pumping potassium and rubidium. J. Korean Phys. Soc. 2015, 66, 1212–1217. [Google Scholar] [CrossRef]
- Lu, C.C.; Huang, J.; Chiu, P.K.; Chiu, S.L.; Jeng, J.T. High-sensitivity low-noise miniature fluxgate magnetometers using a flip chip conceptual design. Sensors 2014, 14, 13815–13829. [Google Scholar] [CrossRef] [PubMed]
- Wickenbrock, A.; Jurgilas, S.; Dow, A.; Marmugi, L.; Renzoni, F. Magnetic induction tomography using an all-optical 87Rb atomic magnetometer. Opt. Lett. 2014, 39, 6367–6370. [Google Scholar] [CrossRef] [PubMed]
- Fang, J.C.; Wang, T.; Quan, W.; Yuan, H.; Zhang, H.; Li, Y.; Zou, S. In situ magnetic compensation for potassium spin-exchange relaxation-free magnetometer considering probe beam pumping effect. Rev. Sci. Instrum. 2014, 85, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Affolderbach, C.; Stӓhler, M.; Knappe, S.; Wynands, R. An all-optical, high-sensitivity magnetic gradiometer. Appl. Phys. B Lasers Opt. 2002, 75, 605–612. [Google Scholar] [CrossRef]
- Zou, S.; Zhang, H.; Chen, X.; Quan, W. Magnetization produced by spin-polarized xenon-129 gas detected by using all-optical atomic magnetometer. J. Korean Phys. Soc. 2015, 66, 887–893. [Google Scholar] [CrossRef]
- Kominis, I.K.; Kornack, T.W.; Allred, J.C.; Romalis, M.V. A subfemtotesla multichannel atomic magnetometer. Nature 2003, 422, 596–599. [Google Scholar] [CrossRef] [PubMed]
- Ito, Y.; Ohnishi, H.; Kamada, K.; Kobayashi, T. Sensitivity improvement of spin-exchange relaxation free atomic magnetometers by hybrid optical pumping of potassium and rubidium. IEEE Trans. Magn. 2011, 47, 3550–3553. [Google Scholar] [CrossRef]
- Allred, J.; Lyman, R.; Kornack, T.; Romalis, M.V. High-sensitivity atomic magnetometer unaffected by spin-exchange relaxation. Phys. Rev. Lett. 2002, 89, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Dang, H.B.; Maloof, A.C.; Romalis, M.V. Ultrahigh sensitivity magnetic field and magnetization measurements with an atomic magnetometer. Phys. Rev. Lett. 2010, 97, 1–3. [Google Scholar] [CrossRef]
- Kamada, K.; Ito, Y.; Ichihara, S.; Mizutani, N.; Kobayashi, T. Noise reduction and signal-to-noise ratio improvement of atomic magnetometers with optical gradiometer configurations. Opt. Express 2015, 23, 6976–6987. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Kim, J.; Moon, M.K.; Lee, K.H.; Lee, S.W.; Ino, T.; Vadim, R.S.; Lee, M.; Kim, G. A compact spin-exchange optical pumping system for 3He polarization based on a solenoid coil, a VBG laser diode, and a cosine theta RF coil. J. Korean Phys. Soc. 2013, 62, 419–423. [Google Scholar] [CrossRef]
- Kim, K.; Begus, S.; Xia, H.; Lee, S.-K.; Jazbinsek, V.; Trontelj, Z.; Romalis, M.V. Multi-channel atomic magnetometer for magnetoencephalography: A configuration study. NeuroImage 2014, 89, 143–151. [Google Scholar] [CrossRef] [PubMed]
- Seltzer, S.J. Developments in Alkali-Metal Atomic Magnetometry; University of Princeton: Princeton, NJ, USA, 2008. [Google Scholar]
- Kornack, T.W. A Test of CPT and Lorentz Symmetry Using a K−3 He Co-Magnetometer; University of Princeton: Princeton, NJ, USA, 2005. [Google Scholar]

© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhang, H.; Zou, S. Measurement Sensitivity Improvement of All-Optical Atomic Spin Magnetometer by Suppressing Noises. Sensors 2016, 16, 896. https://doi.org/10.3390/s16060896
Chen X, Zhang H, Zou S. Measurement Sensitivity Improvement of All-Optical Atomic Spin Magnetometer by Suppressing Noises. Sensors. 2016; 16(6):896. https://doi.org/10.3390/s16060896
Chicago/Turabian StyleChen, Xiyuan, Hong Zhang, and Sheng Zou. 2016. "Measurement Sensitivity Improvement of All-Optical Atomic Spin Magnetometer by Suppressing Noises" Sensors 16, no. 6: 896. https://doi.org/10.3390/s16060896
APA StyleChen, X., Zhang, H., & Zou, S. (2016). Measurement Sensitivity Improvement of All-Optical Atomic Spin Magnetometer by Suppressing Noises. Sensors, 16(6), 896. https://doi.org/10.3390/s16060896