
Development of a Low-Cost Arduino-Based Sonde for Coastal Applications


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Sonde Design and Functional Testing
2.2. Drifter Application
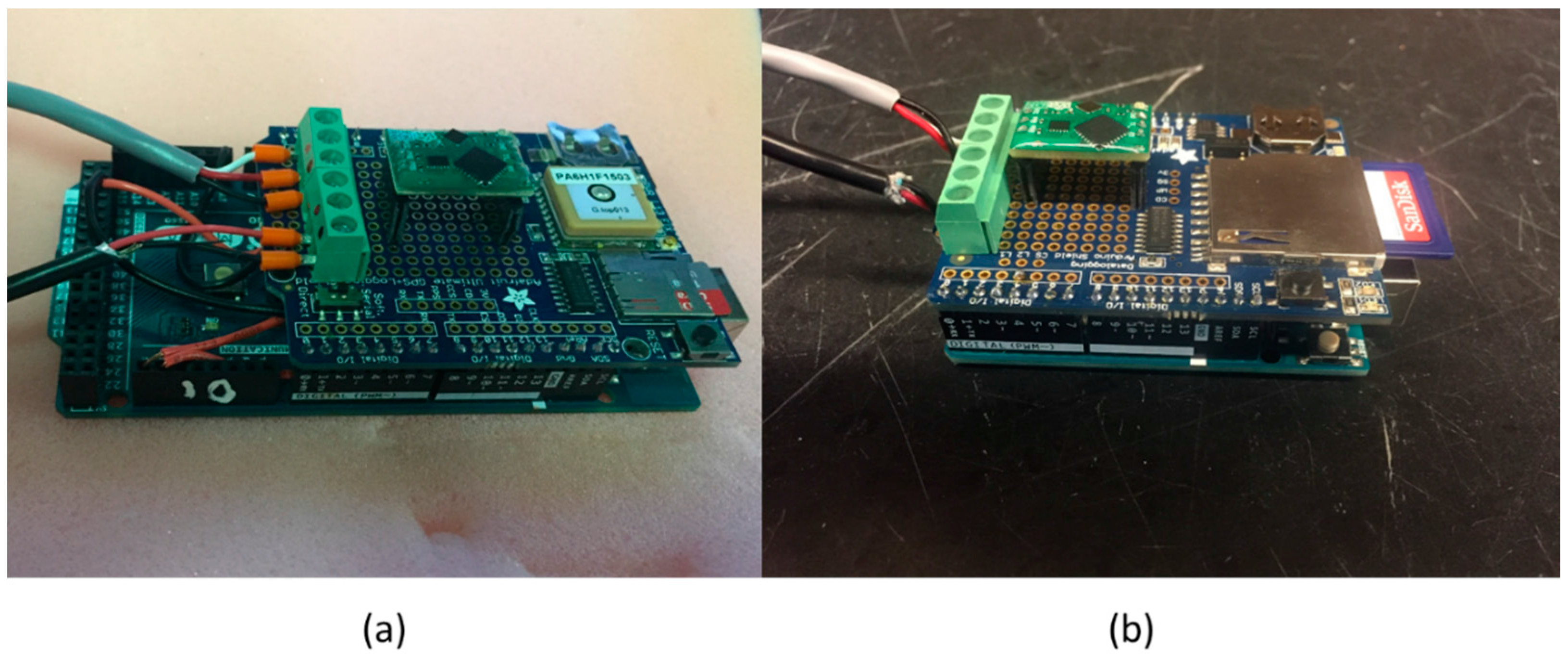
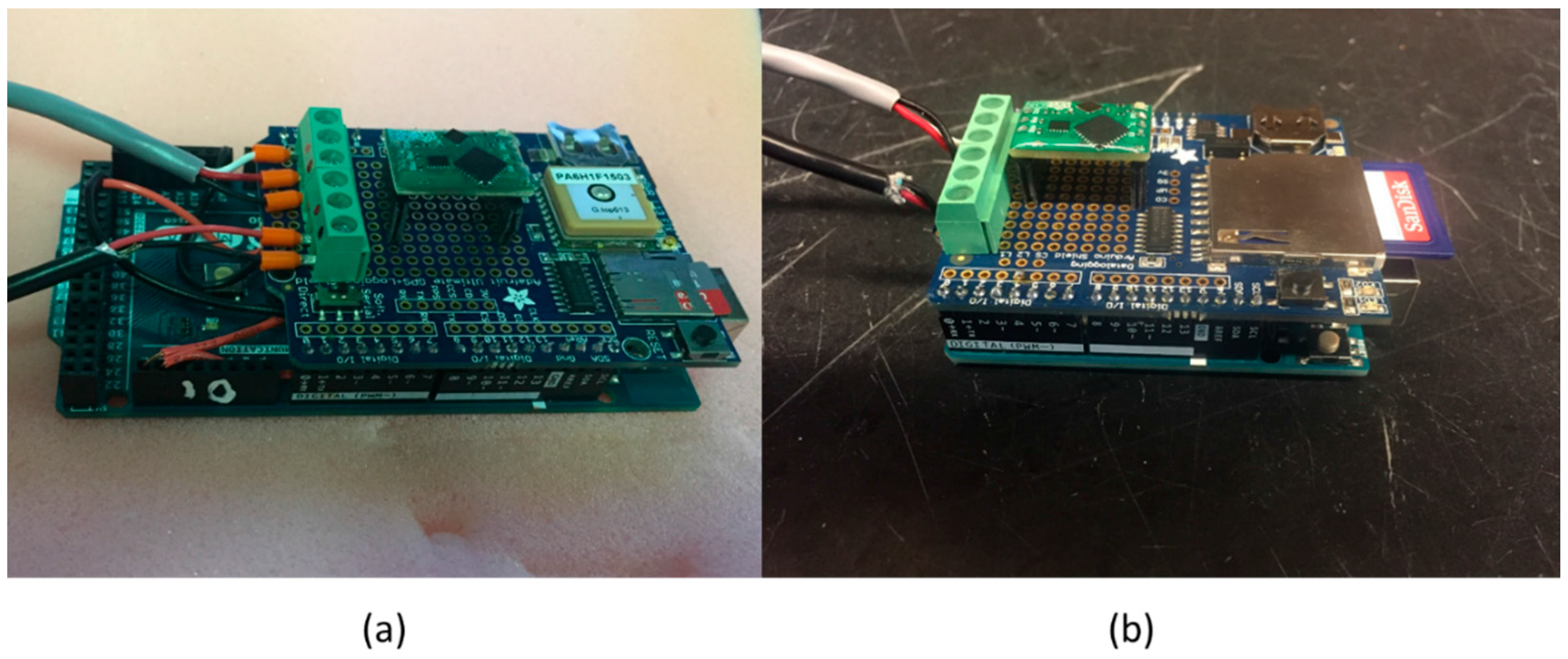
2.2.1. Drifter Hardware
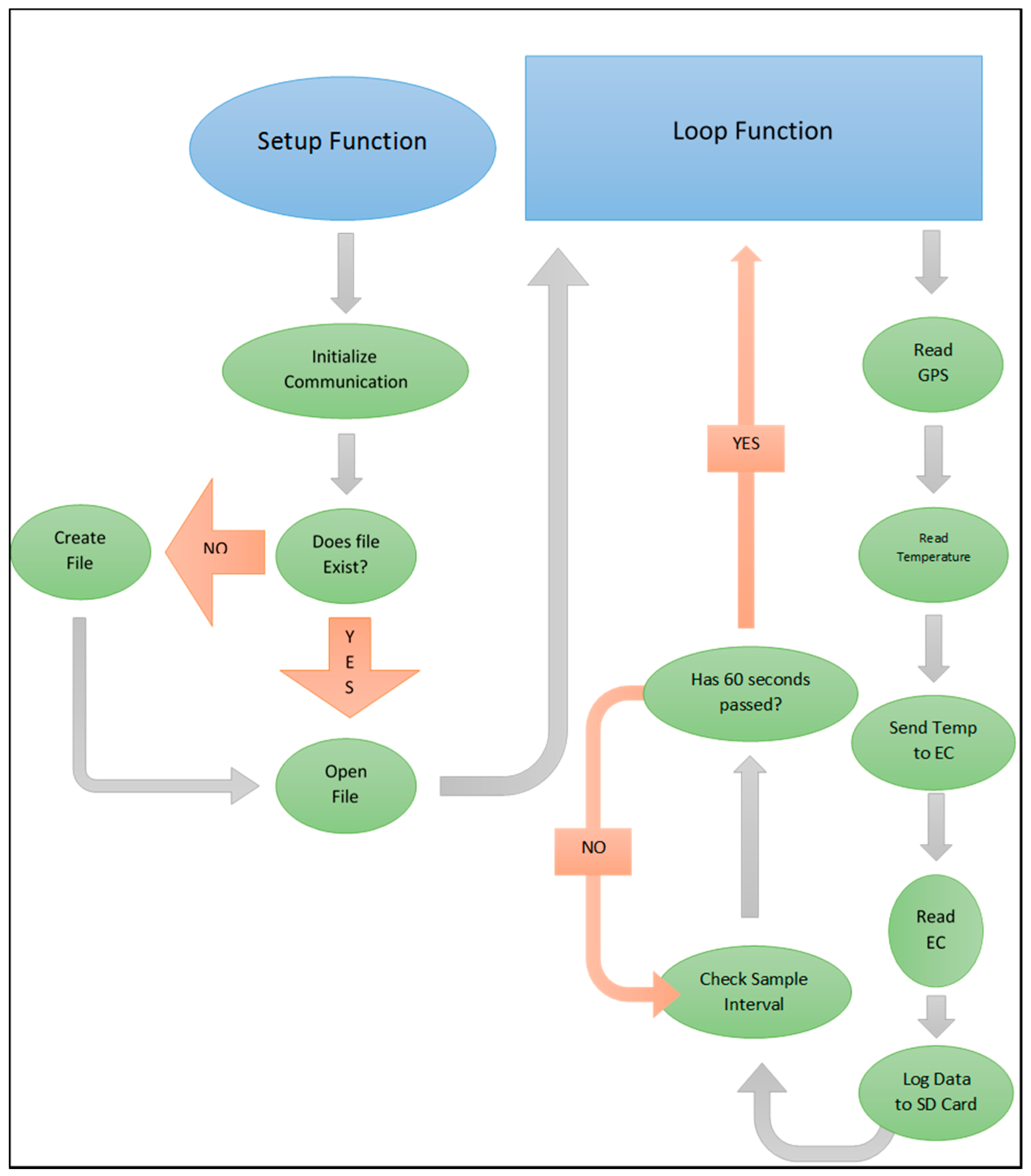
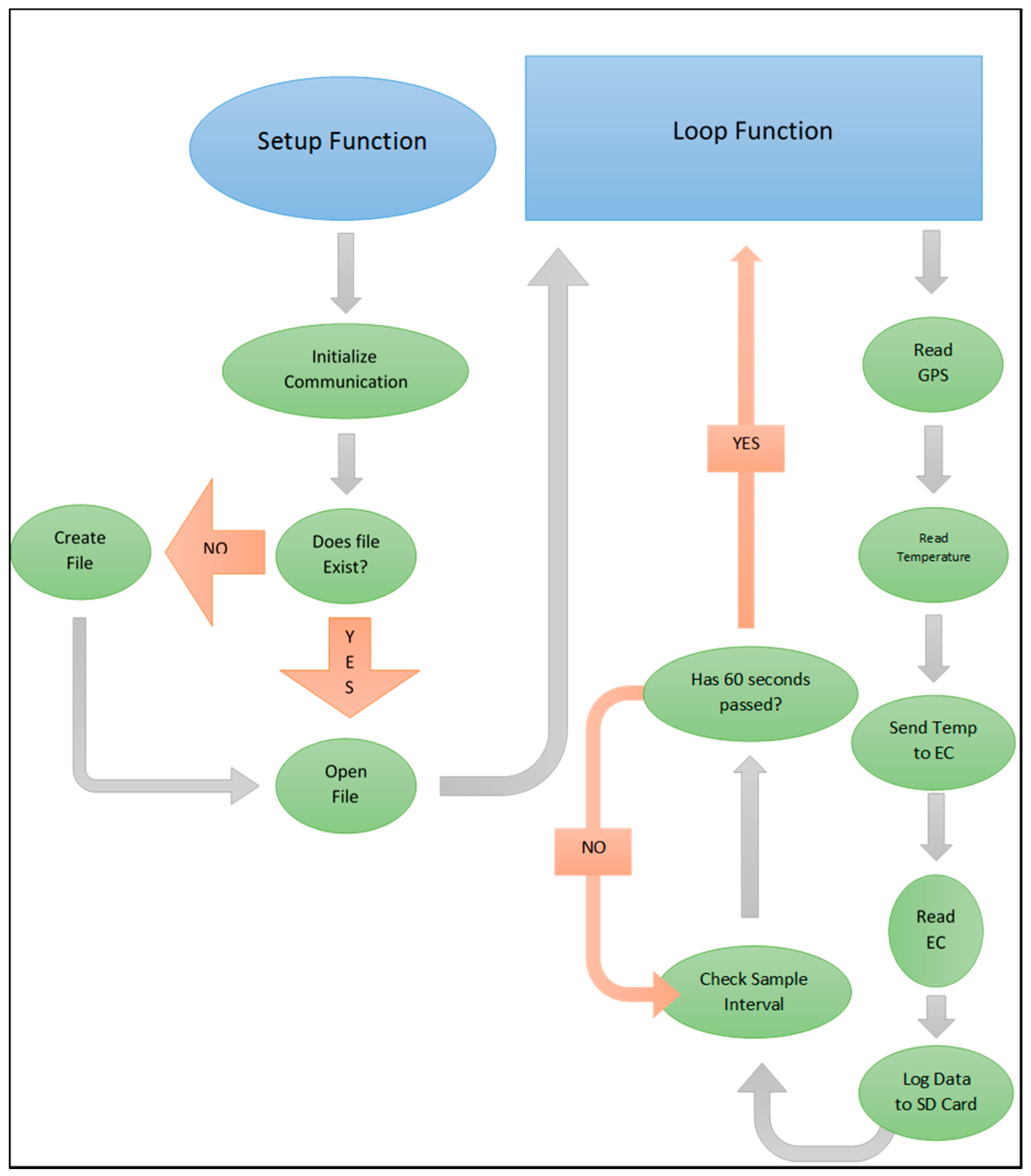
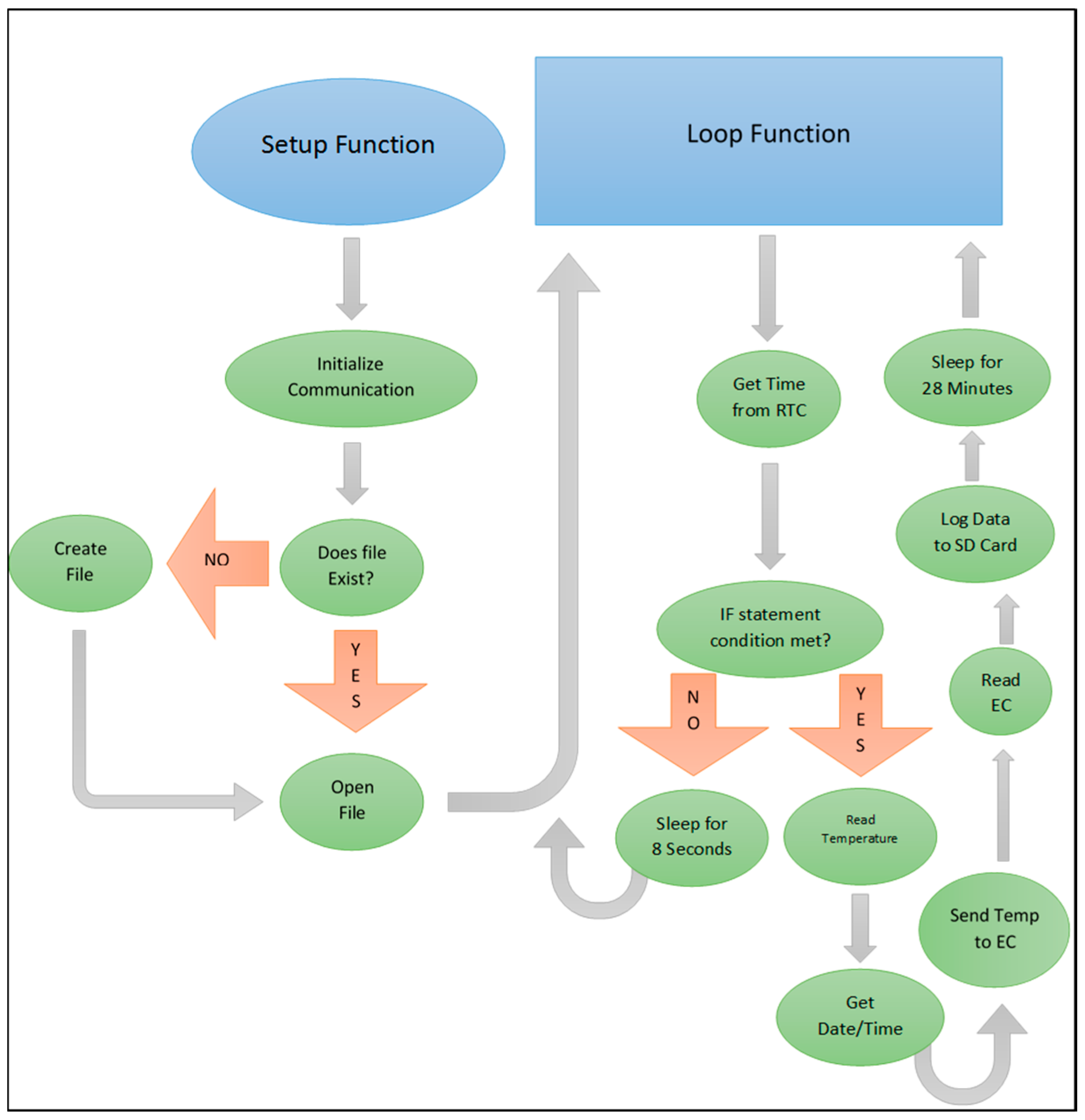
2.2.2. Drifter Software
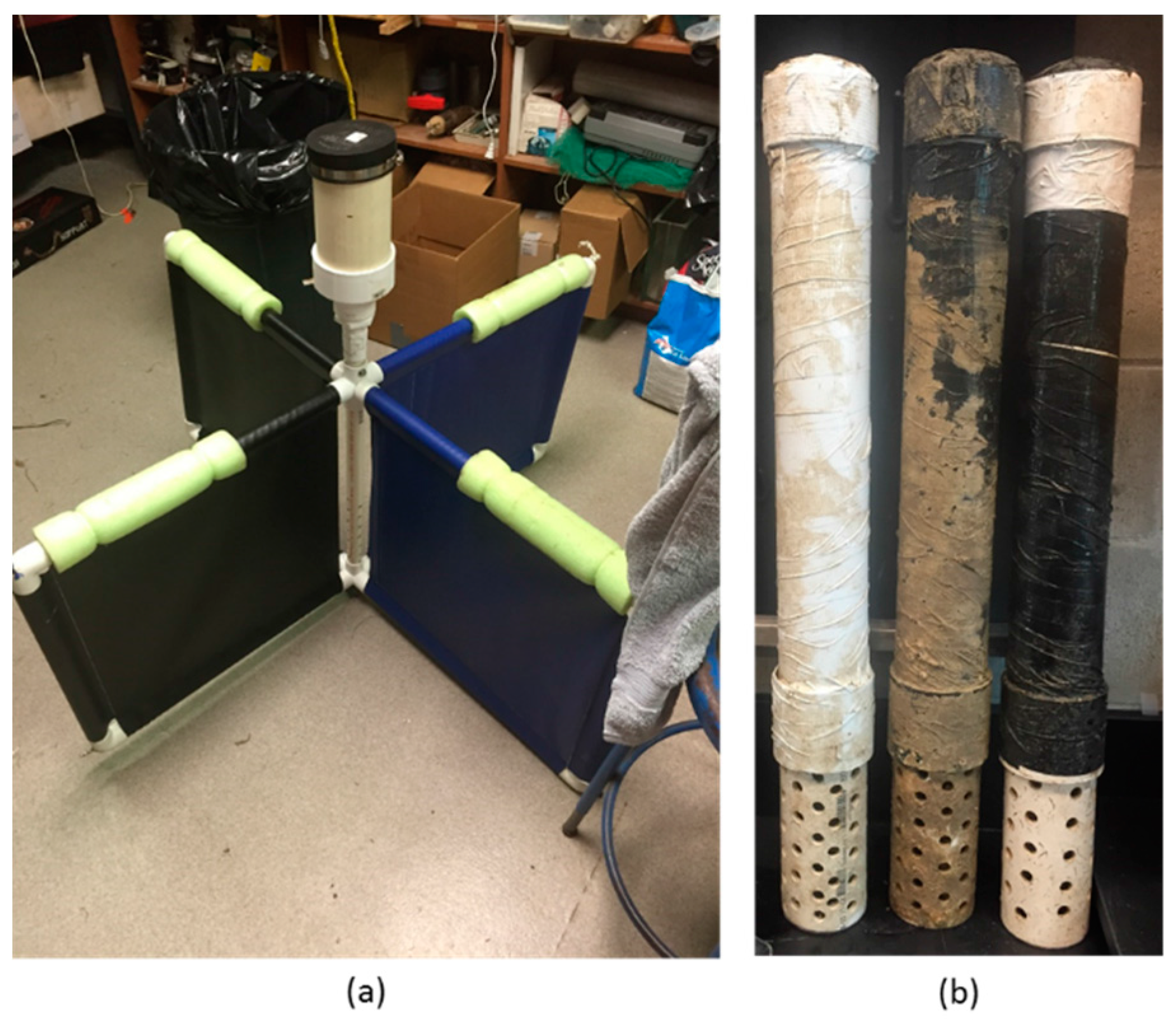
2.2.3. Drifter Housing
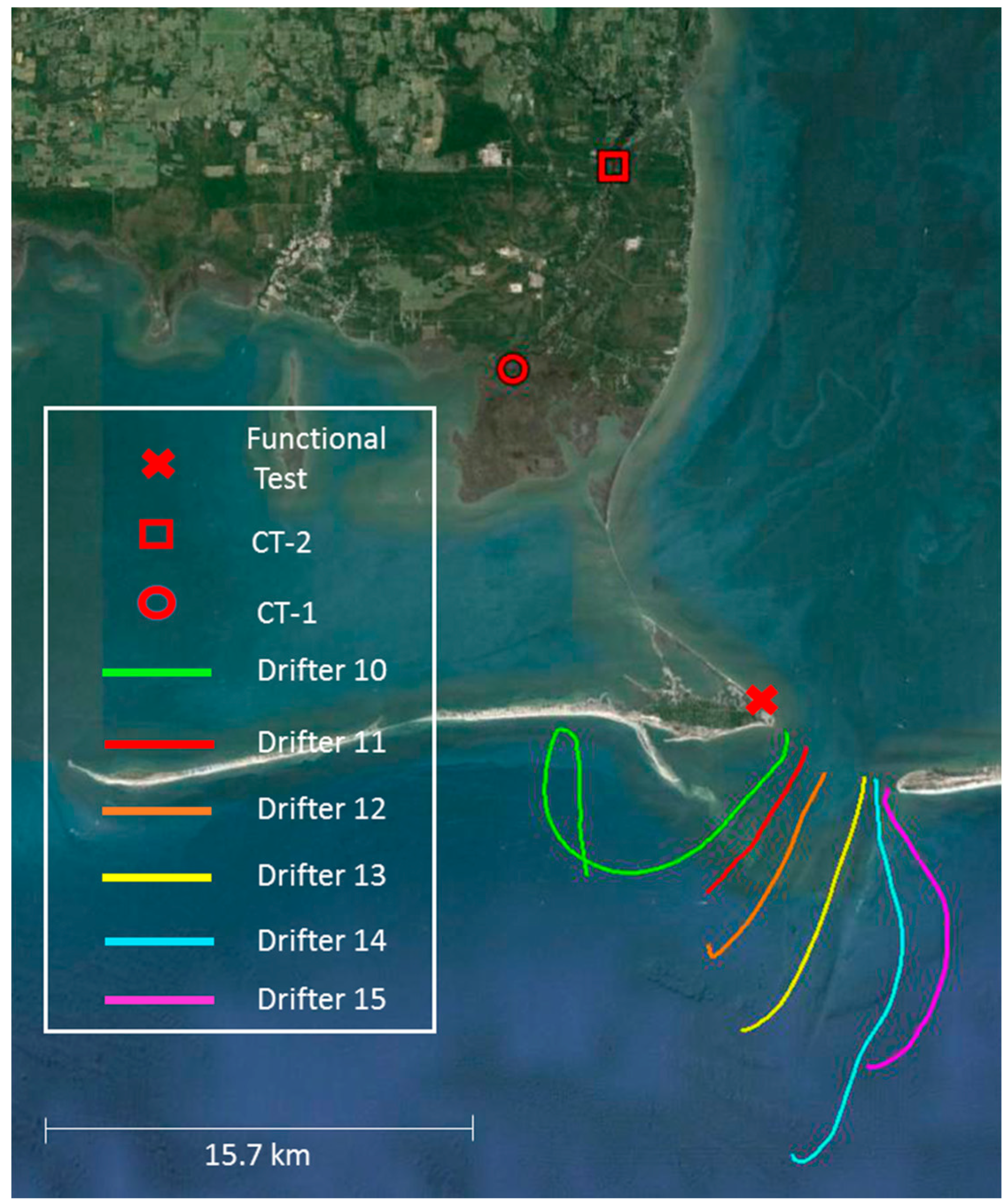
2.2.4. Drifter Deployment
2.3. Moored Application
2.3.1. Moored Hardware
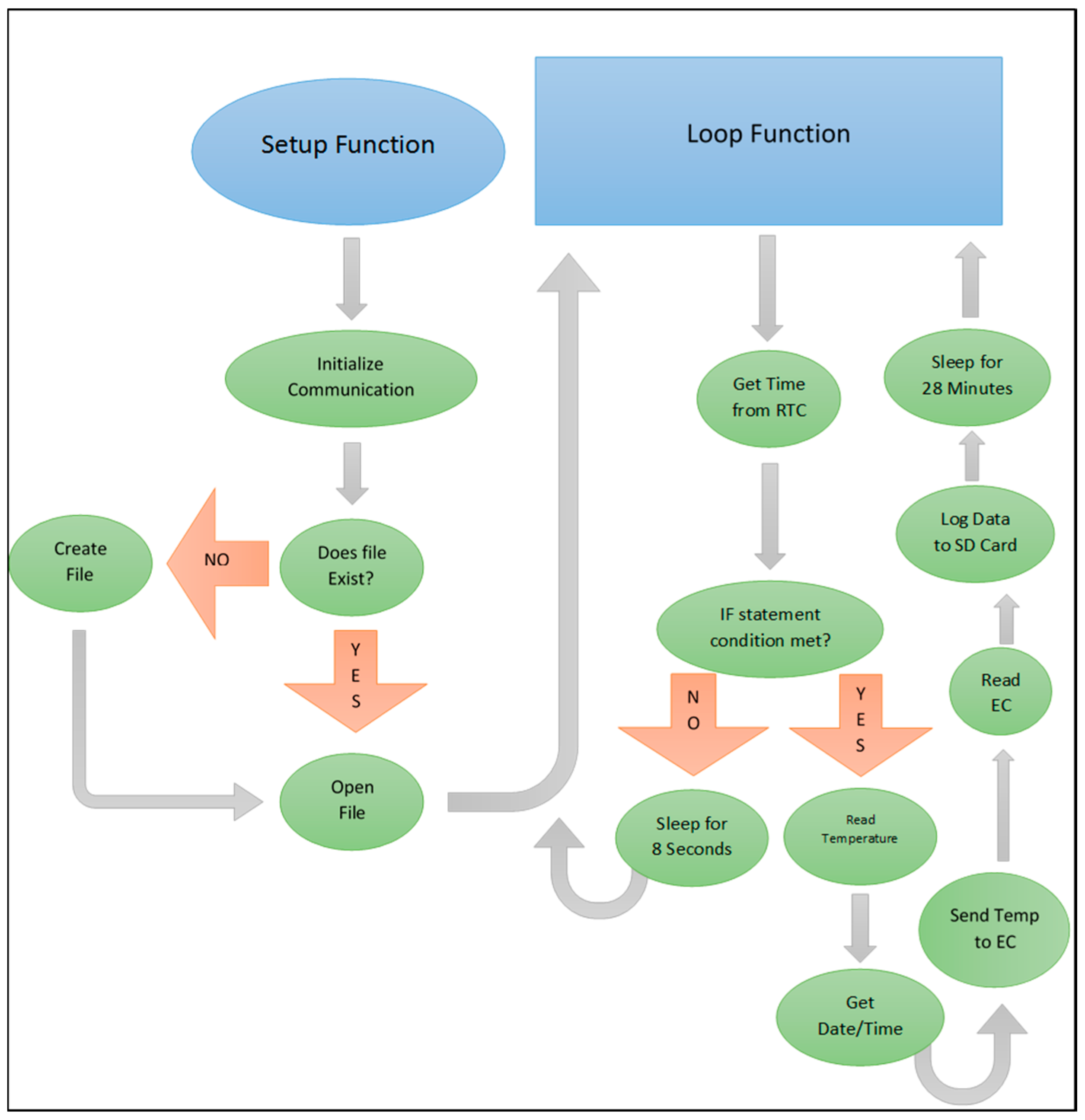
2.3.2. Moored Software
2.3.3. Moored Housing
2.3.4. Moored Deployment
2.4. Construction Costs
3. Results
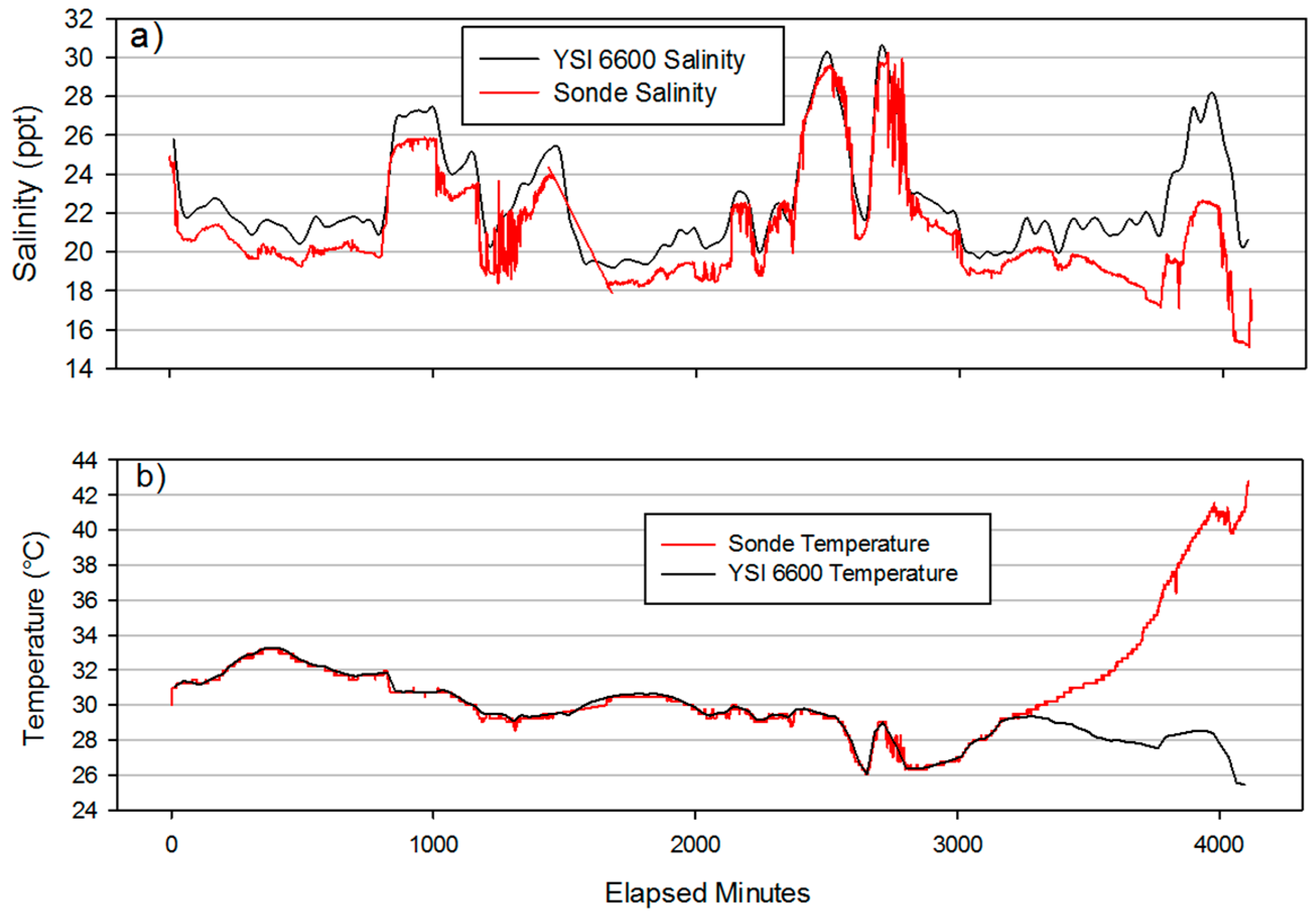
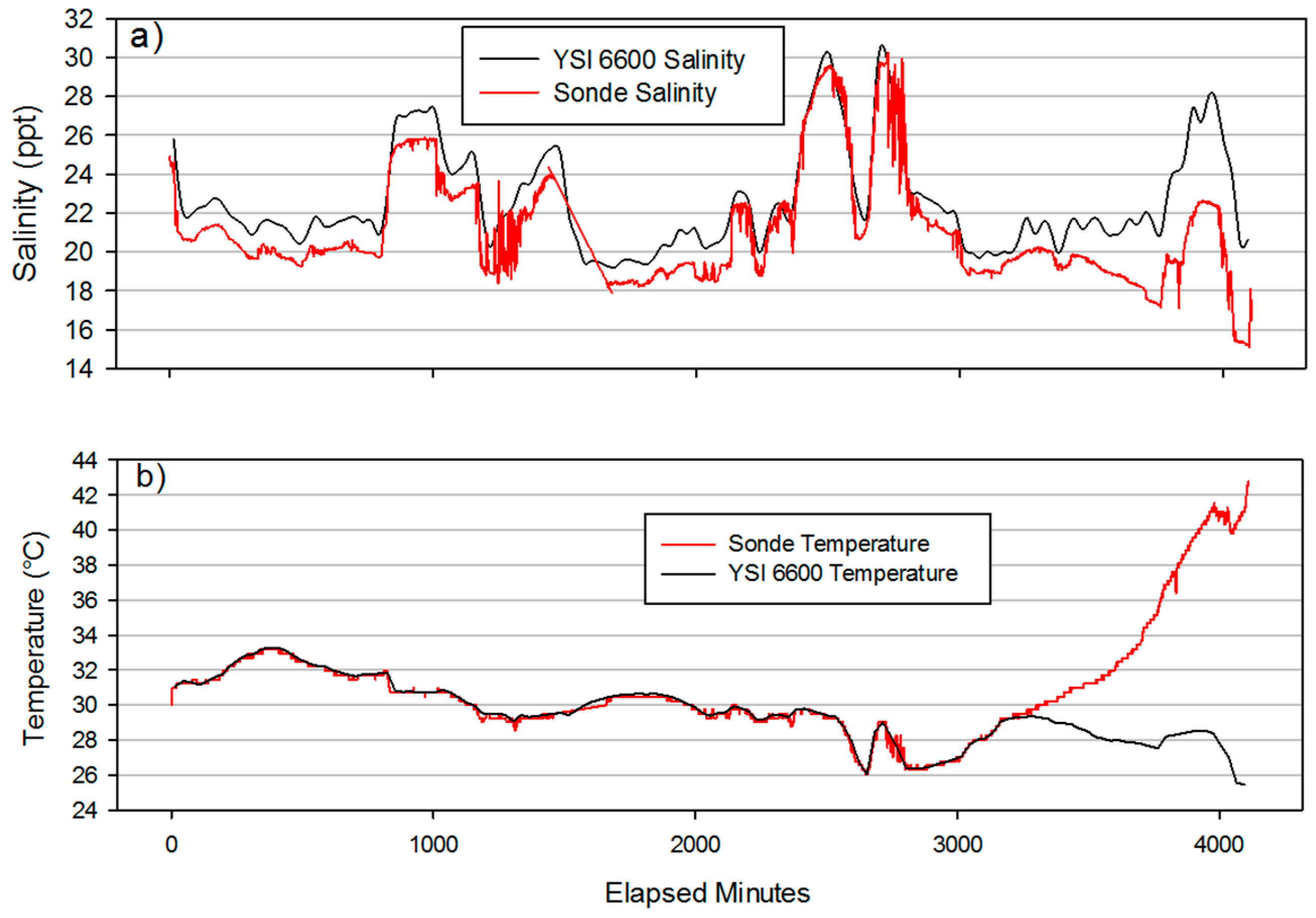
3.1. Functional Testing
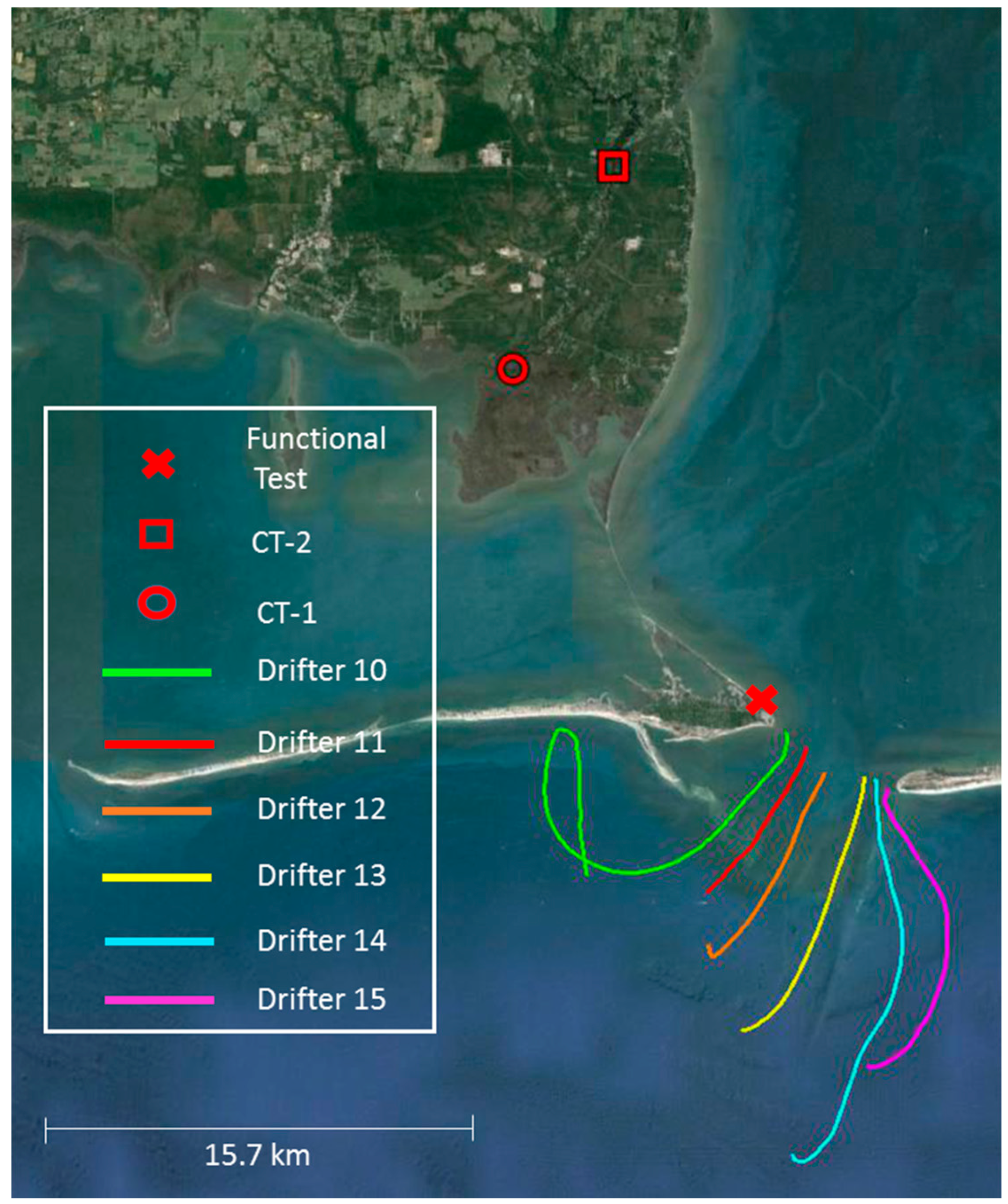
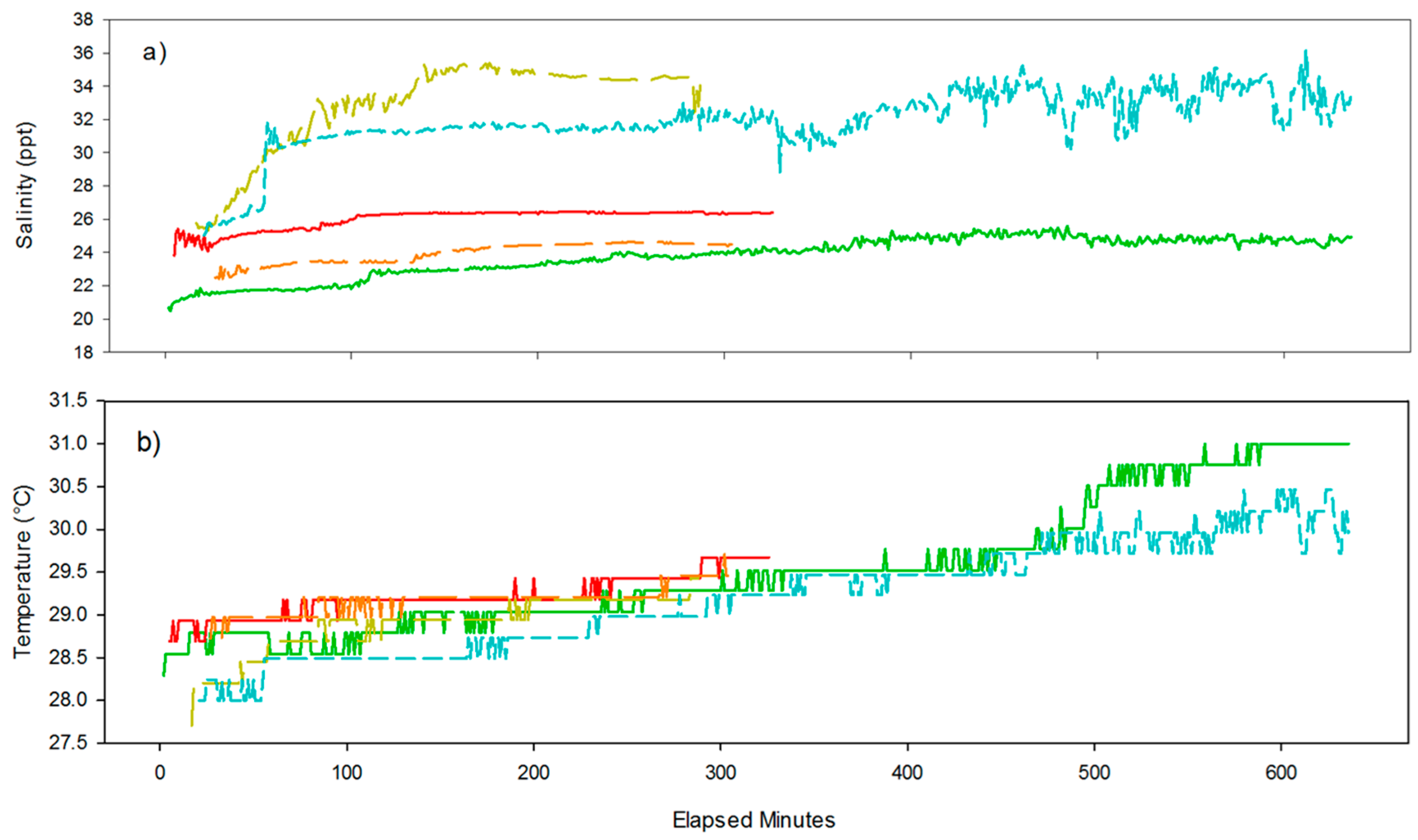
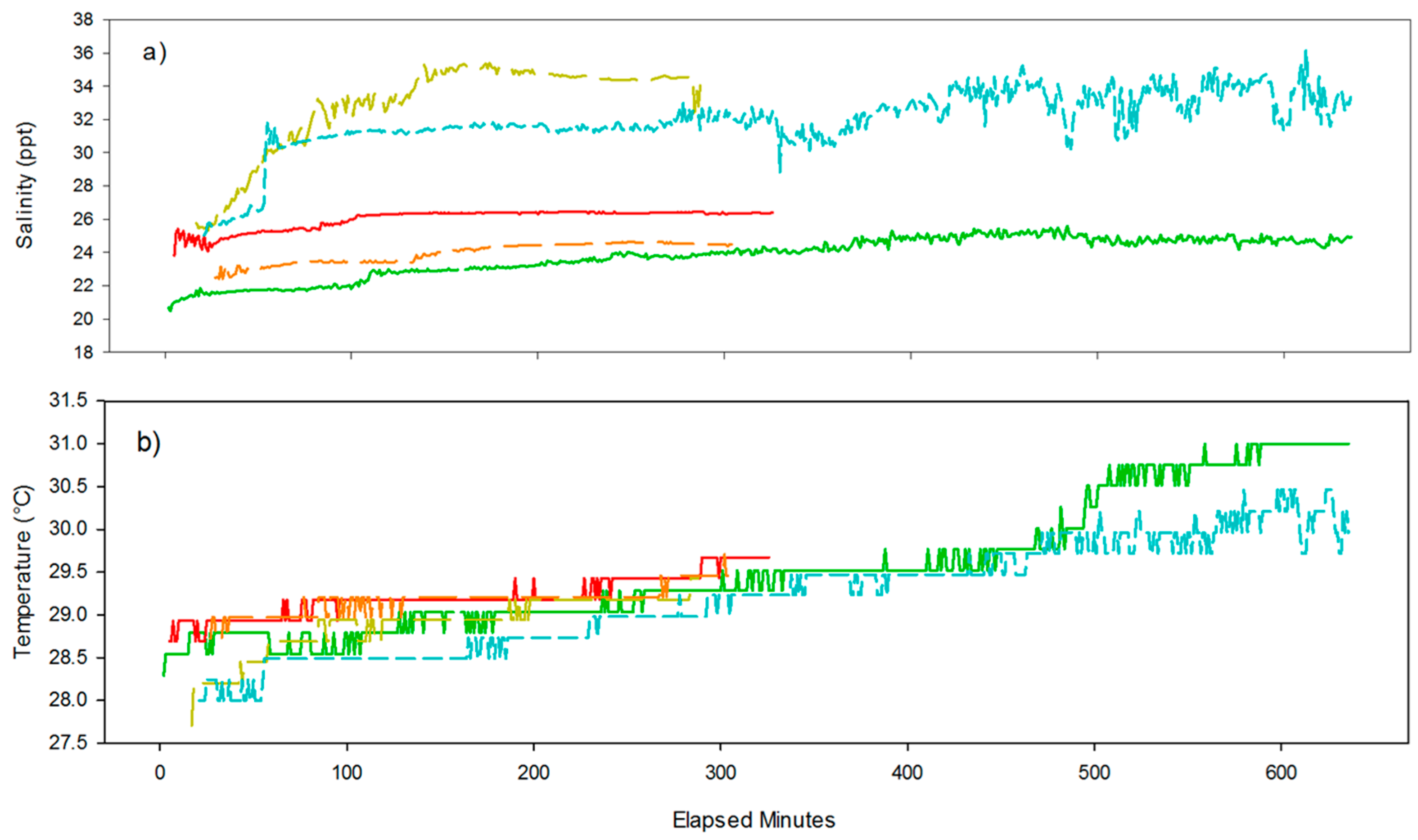
3.2. Drifter Deployment
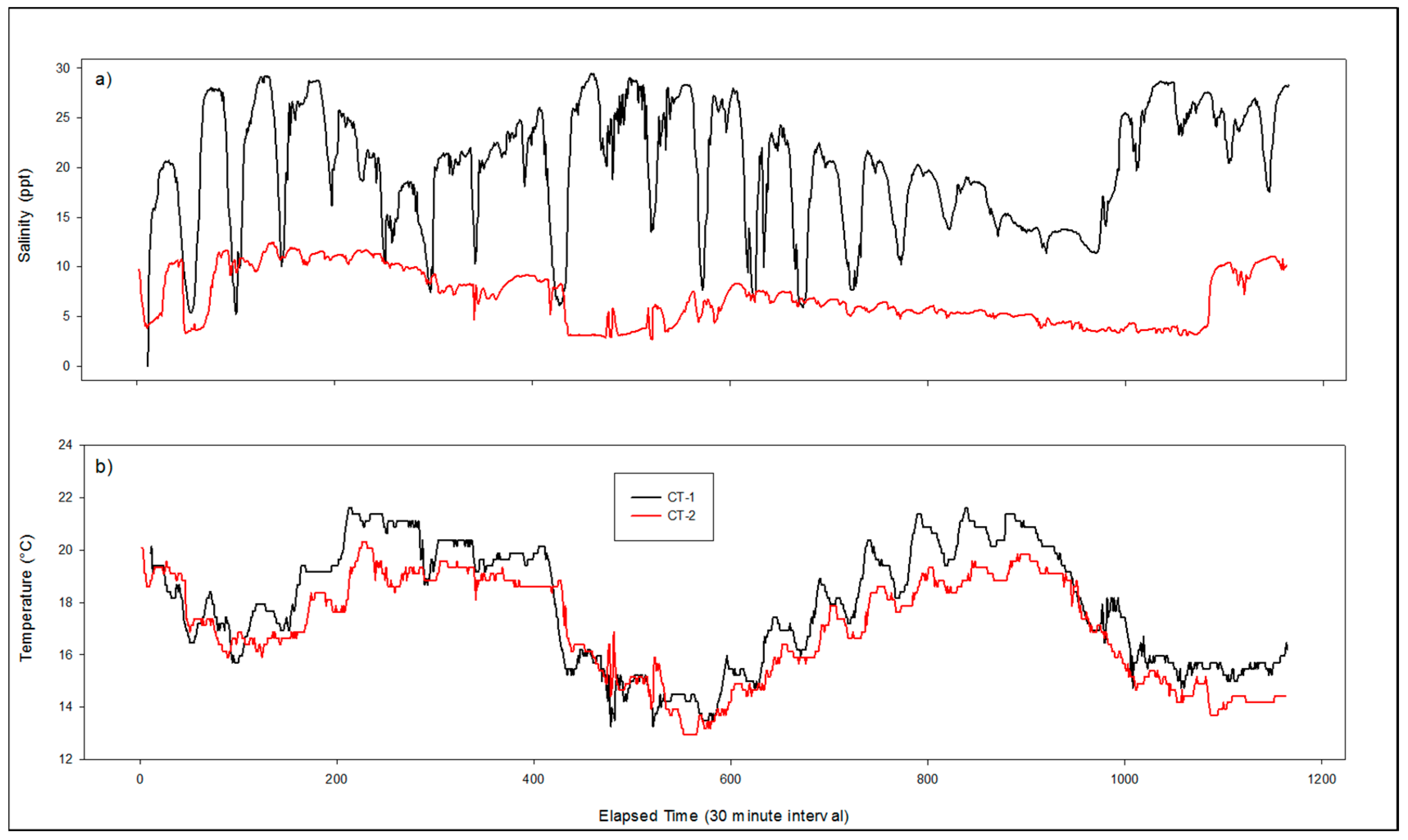
3.3. CT Deployment
4. Discussion
4.1. Functional Testing
4.2. Drifter Deployment
4.3. Mooring Deployment
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AUGPSS | Adafruit Ultimate GPS Logger Shield |
| Cm | Centimeter |
| CSV | Comma Separated Values |
| CT | Conductivity and temperature |
| DAR | Drag area ratio |
| DISL | Dauphin Island Sea Lab |
| DOAJ | Directory of open access journals |
| EC | Atlas Scientific EZO-EC electrical conductivity microchip |
| GMT | Greenwich Mean Time |
| GPS | Global Positioning System |
| GRIIDC | Gulf of Mexico Research Initiative Information & Data Cooperative |
| ICM | Integrated circuit microcontroller |
| ID | Inner diameter |
| IDE | Integrated development environment |
| LD | linear dichroism |
| Ma | Milliampere |
| MAh | Milliampere hours |
| MDPI | Multidisciplinary digital publishing Institute |
| Mega | Arduino Mega 2560 |
| Mm | Millimeter |
| NMEA | National Marine Electronics Association |
| OD | Outer diameter |
| Ppt | Parts per thousand |
| PVC | Polyvinal chloride |
| RMS | Root Mean Square |
| RTC | Real time clock |
| SD | Standard deviation |
| SD | Secure digital memory card |
| SE | Standard error |
| TLA | Three letter acronym |
| Uno | Arduino Uno |
| WDT | Watchdog Timer |
References
- Heilmayer, O.; Digialleonardo, J.; Qian, L.; Roesijadi, G. Stress tolerance of a subtropical Crassostrea virginica population to the combined effects of temperature and salinity. Estuar. Coast. Shelf Sci. 2008, 79, 179–185. [Google Scholar] [CrossRef]
- Kasar, C.W.; Tamplin, M.L. Effects of temperature and salinity on the survival of Vibrio vulnificus in seawater and shellfish. Appl. Environ. Microbiol. 1993, 59, 2425–2429. [Google Scholar]
- Pinardi, N.; Coppini, G. Preface “operational oceanography in the Mediterranean Sea: The second stage of development”. Ocean Sci. 2010, 6, 263–267. [Google Scholar] [CrossRef]
- Marcelli, M.; Piermattei, V.; Madonia, A.; Marcelli, U. Design and Application of New Low-Cost Instruments for Marine Environmental Research. Sensors 2014, 14, 23348–23364. [Google Scholar] [CrossRef] [PubMed]
- Albaladejo, C.; Soto, F.; Torres, R.; Sanchez, P.; Lopez, J. A low-Cost sensor buoy system for monitoring shallow marine environments. Sensors 2012, 12, 9612–9634. [Google Scholar]
- Arduino. What is Arduino. Available online: https://www.arduino.cc/en/Guide/Introduction (accessed on 22 December 2015).
- Arizaga, J.; de la Calleja, J.; Hernandez, R.; Benitez, A. Automatic Control for Laboratory Sterilization Process based on Arduino Hardware. In Proceedings of the 22nd International Conference on Electrical Communications and Computers (CONIELECOMP), Cholula, Puebla, 27–29 February 2012; pp. 130–133.
- Leeuw, T.; Boss, E.; Wright, D. In Situ Measurements of Phytoplankton Flourescence Using Low Cost Electronics. Sensors 2013, 13, 7872–7883. [Google Scholar] [CrossRef] [PubMed]
- Barnard, H.; Findley, M.; Csavina, J. PARduino: A simple and inexpensive device for logging photosynthetically active radiation. Tree Physiol. 2014, 34, 640–645. [Google Scholar] [CrossRef] [PubMed]
- Fisher, D.; Gould, P. Open-Source hardware is a low-Cost alternative for scientific instrumentation and research. Mod. Instrum. 2012, 1, 8–20. [Google Scholar] [CrossRef]
- Trevathan, T.; Johnstone, R.; Chiffings, T.; Atkinson, I.; Bergman, N.; Read, W.; Theiss, S.; Stevens, T. SEMAT—The next generation of inexpensive marine environmental measurement and monitoring Systems. Sensors 2012, 12, 9711–9748. [Google Scholar] [CrossRef] [PubMed]
- Wickert, A. The Alog: Inexpensive, open-source, automated data collection in the field. Bull. Ecol. Soc. Am. 2014, 95, 166–176. [Google Scholar] [CrossRef]
- Ham, J. Using Arduinos and 3D-printers to build research-grade weather stations and environmental sensors. Am. Geophys. Union Fall Meet. Abstr. 2013, 1, 1573. [Google Scholar]
- Simic, M. Design and development of air temperature and relative humidity monitoring system with AVE processor based web server. In Proceedings of the International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 16–18 October 2014; pp. 38–41.
- Ferrarezi, R.; Dove, S.; van lersel, M. An automated system for monitoring soil moisture and controlling irrigation using low-cost open-source microcontrollers. HortTechnology 2015, 25, 110–118. [Google Scholar]
- Singh, R.; Singh, S.P. Development of a low cost wireless temperature monitoring system of industrial and research application. Int. J. Curr. Eng. Technol. 2015, 5, 355–361. [Google Scholar]
- Busquets, J.; Busquets, J.V.; Tudela, D.; Perez, F.; Busquets-Carbonell, J.; Barbera, A.; Rodriguez, C.; Garcia, A.; Gilabert, J. Low-cost AUV based on Arduino open source microcontroller board for oceanographic research applications in a collaborative long term deployment missions and suitable for combining with a USV as an autonomous automatic recharging platform. In Proceedings of the IEEE/OES Conference on Autonomous Underwater Vehicles (AUV), Southampton, UK, 24–27 September 2012; pp. 1–10.
- Gandra, M.; Seabra, R.; Lima, F.P. A low-cost, versatile data logging system for ecological applications. Limnol. Oceanogr. Methods 2015, 13, 115–126. [Google Scholar] [CrossRef]
- Niiler, P.P.; Paduan, J.D. Wind-driven motions in the Northeast Pacific as measured by lagrangian drifters. J. Phys. Oceanogr. 1995, 25, 2819–2830. [Google Scholar] [CrossRef]
- Lightweight Low Power Arduino Library. Available online: http://www.rocketscream.com/blog/2011/07/04/lightweight-low-power-arduino-library/ (accessed on 10 October 2015).
- McPhearson, R.M. The hydrography of Mobile Bay and Mississippi Sound Alabama. J. Mar. Sci. 1970, 1, 1–83. [Google Scholar]
- Schroeder, W.W.; Dinnel, S.P.; Wiseman, W.J., Jr. Salinity stratification in a river-dominated estuary. Estuaries 1990, 13, 145–154. [Google Scholar] [CrossRef]
- Delauney, L.; Compere, C.; Lehaitre, M. Biofouling protection for marine environmental sensors. Ocean Sci. 2010, 6, 503–511. [Google Scholar] [CrossRef]
- George, R.Y.; Thomas, P.J. Biofouling community dynamics in Louisiana Shelf oil platforms in the Gulf of Mexico. Rice Univ. Stud. 1979, 65, 553–574. [Google Scholar]
- Fetcenko, M.A.; Ovshinsky, S.R.; Reichman, B.; Young, K.; Fierro, C.; Koch, J.; Zallen, A.; Mays, M.; Ouchi, T. Recent advances in NiMH battery technology. J. Power Sources 2007, 165, 544–551. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drifter Application | |||
| Component | Manufacturer | Supplier | Cost ($) |
| Arduino Mega 2560 | Arduino | Arduino.cc | 45.95 |
| Ultimate GPS Logger Shield | Adafruit | Adafruit.com | 49.95 |
| EZO-EC Microchip | Atlas Scientific | Atlas-scientific.com | 58.00 |
| Conductivity K 1.0 Probe | Atlas Scientific | Atlas-scientific.com | 126.00 |
| ENV-TMP Probe | Atlas Scientific | Atlas-scientific.com | 25.00 |
| PCB mount 3 pin 5.08 mm screw terminal | Uxcell | Amazon.com | 1.90 |
| TOTAL COST | 306.80 | ||
| Mooed Application | |||
| Component | Manufacturer | Supplier | Cost ($) |
| Arduino UNO | Arduino | Arduino.cc | 24.95 |
| Adafruit Data Logging Shield | Adafruit | Adafruit.com | 19.95 |
| EZO-EC Microchip | Atlas Scientific | Atlas-scientific.com | 58.00 |
| Conductivity K 1.0 Probe | Atlas Scientific | Atlas-scientific.com | 126.00 |
| ENV-TMP Probe | Atlas Scientific | Atlas-scientific.com | 25.00 |
| PCB mount 3 pin 5.08 mm screw terminal | Uxcell | Amazon.com | 1.90 |
| TOTAL COST | 255.80 | ||
| Drifter | Release Time (GMT) | Recovery Time (GMT) | Total Deployment Time | Distance Traveled (km) | Drifter Final Salinity (ppt) | Drifter Final Temperature (°C) | YSI 2030 Salinity (ppt) | YSI 2030 Temperature (°C) |
|---|---|---|---|---|---|---|---|---|
| 10 | 11:37 | 12:03 | 24 h 26 min | 21.43 | 26.66 | 29.03 | NA | NA |
| 11 | 11:35 | 16:40 | 5 h 5 min | 6.46 | 26.41 | 29.67 | 23.33 | 30.35 |
| 12 | 11:31 | 16:18 | 4 h 42 min | 8.43 | 24.49 | 29.46 | 23.25 | 29.8 |
| 13 | 11:41 | 16.03 | 4 h 22 min | 10.63 | 34.03 | 29.43 | 25.36 | 29.87 |
| 14 | 11:19 | 21:50 | 10 h 31 min | 15.62 | 33.31 | 29.96 | 24.47 | 31.2 |
| 15 | 11:16 | 21:35 | 10 h 19 min | 12.09 | 24.19 | 40.21 | 21.2 | 28.65 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a Low-Cost Arduino-Based Sonde for Coastal Applications. Sensors 2016, 16, 528. https://doi.org/10.3390/s16040528
Lockridge G, Dzwonkowski B, Nelson R, Powers S. Development of a Low-Cost Arduino-Based Sonde for Coastal Applications. Sensors. 2016; 16(4):528. https://doi.org/10.3390/s16040528
Chicago/Turabian StyleLockridge, Grant, Brian Dzwonkowski, Reid Nelson, and Sean Powers. 2016. "Development of a Low-Cost Arduino-Based Sonde for Coastal Applications" Sensors 16, no. 4: 528. https://doi.org/10.3390/s16040528
APA StyleLockridge, G., Dzwonkowski, B., Nelson, R., & Powers, S. (2016). Development of a Low-Cost Arduino-Based Sonde for Coastal Applications. Sensors, 16(4), 528. https://doi.org/10.3390/s16040528