
Estimating the Underwater Diffuse Attenuation Coefficient with a Low-Cost Instrument: The KdUINO DIY Buoy



Abstract
:1. Introduction
2. Design and Manufacturing of the KdUINO
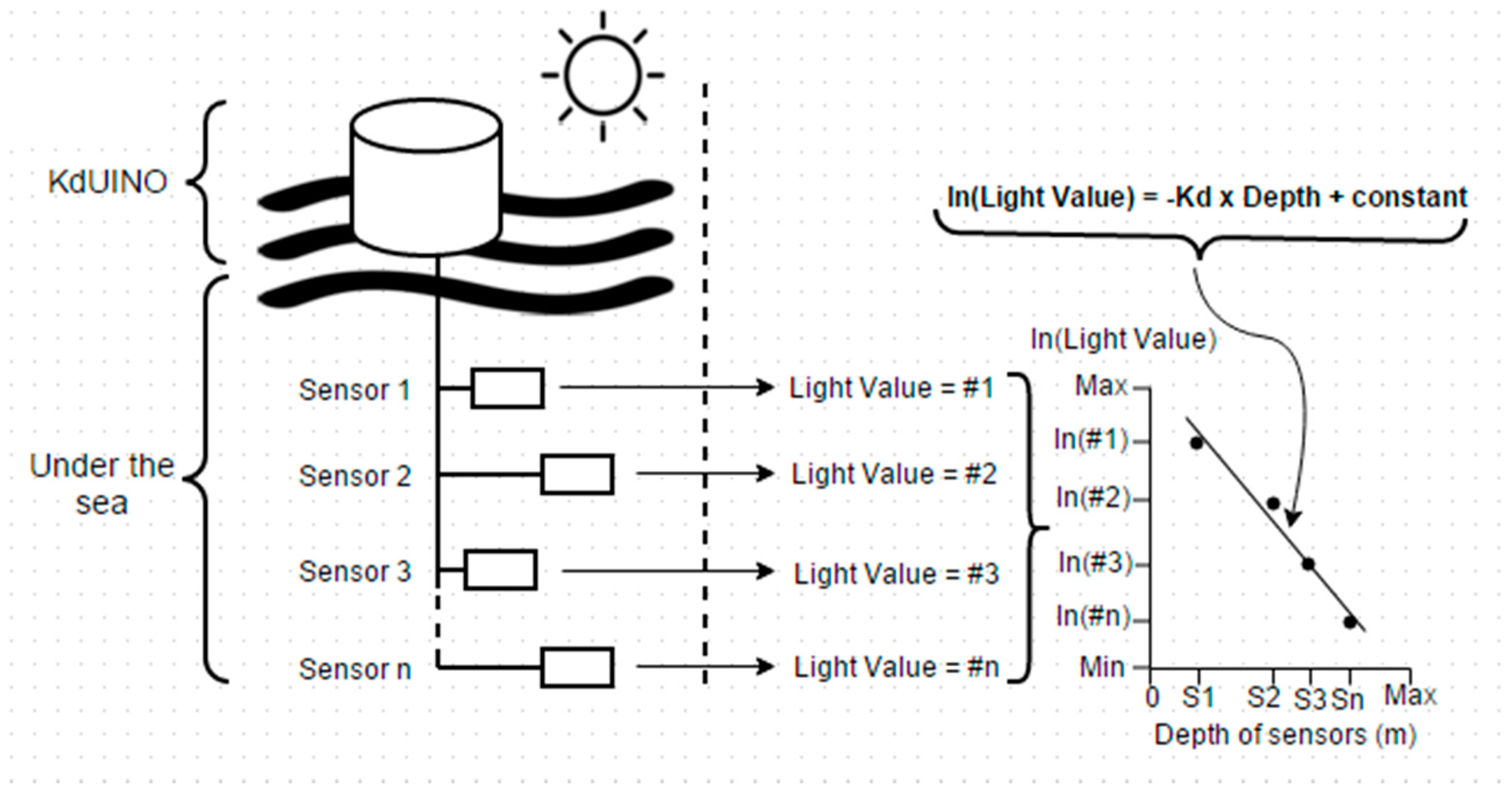
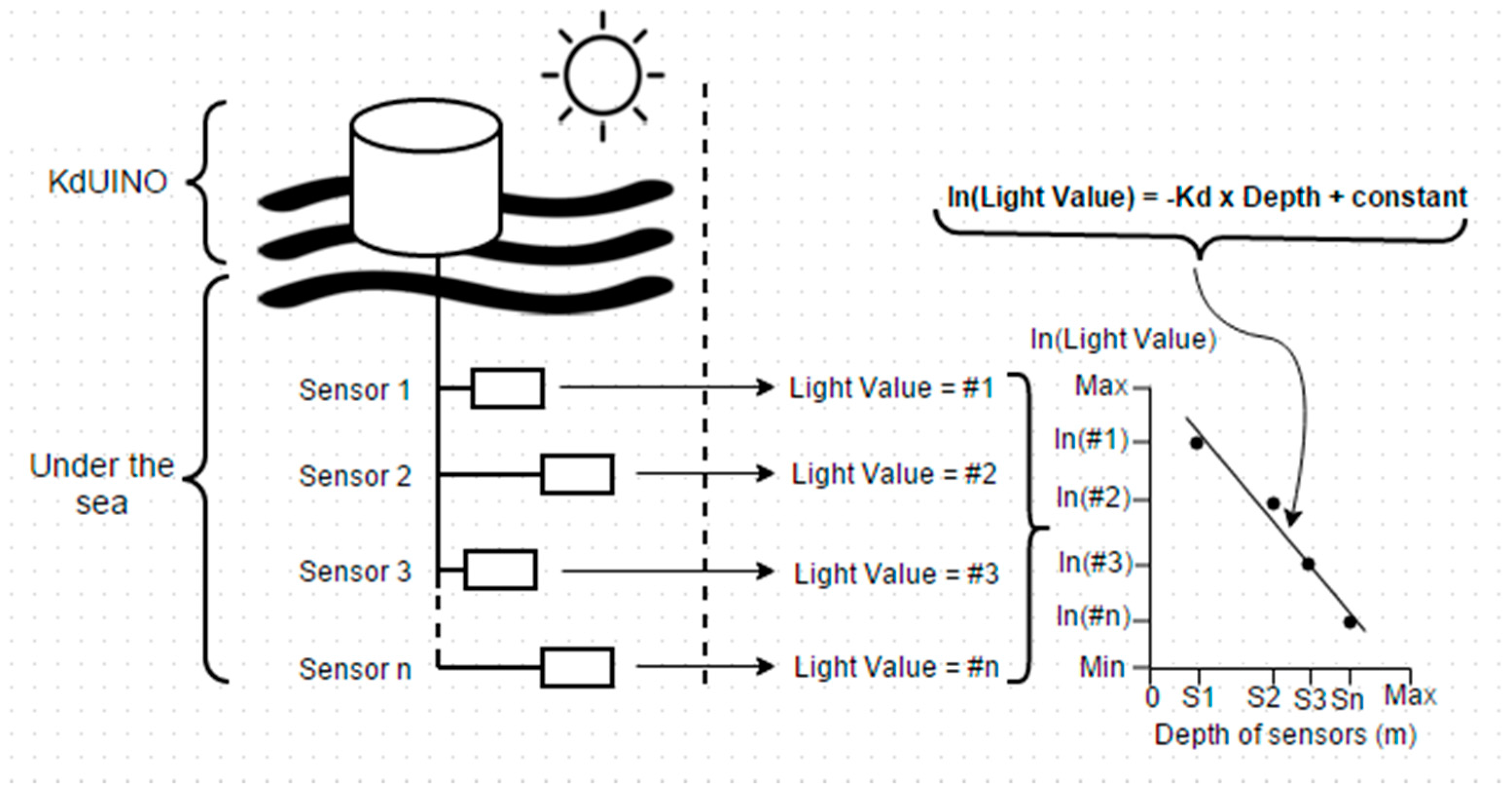
2.1. KdUINO Principles
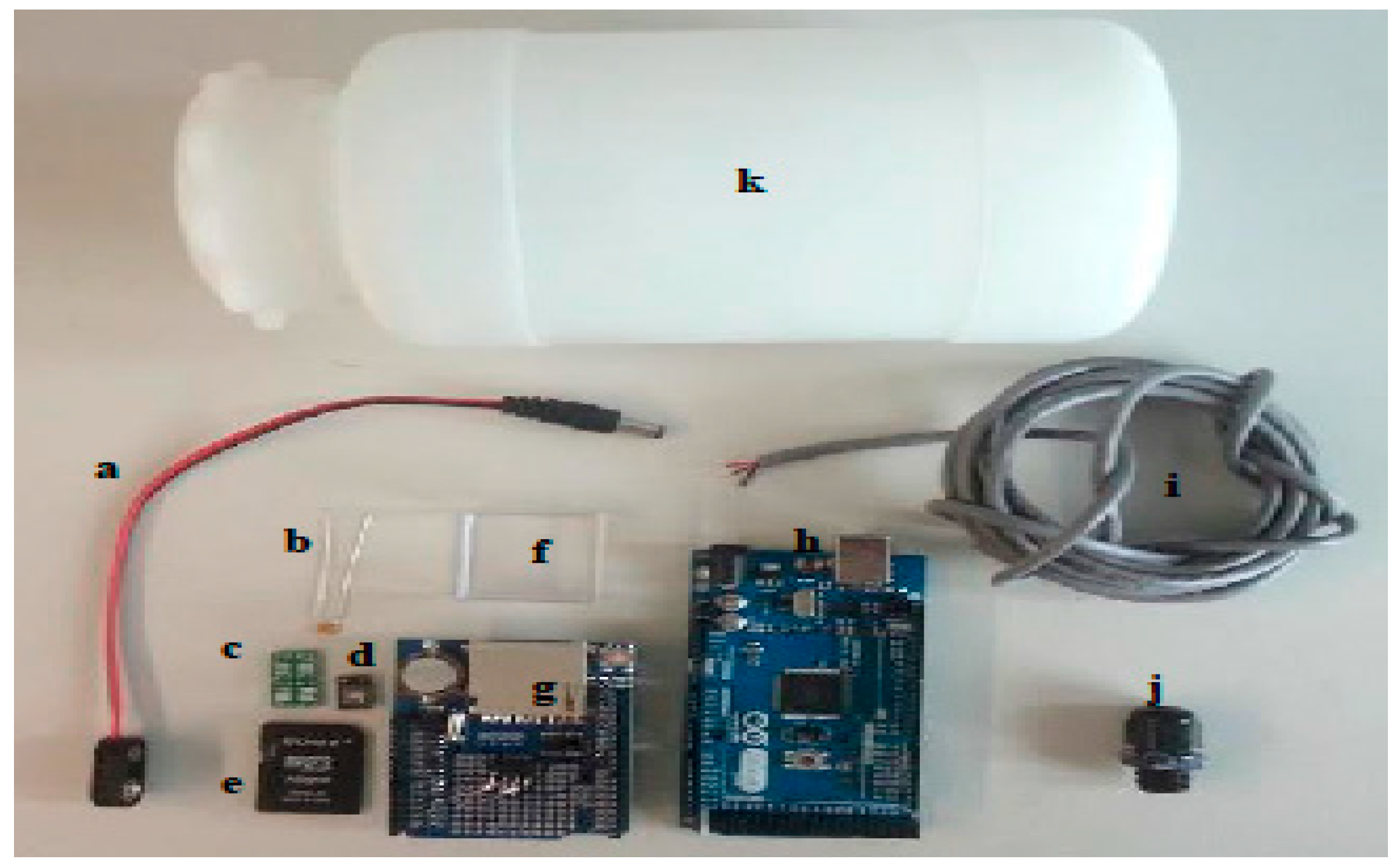
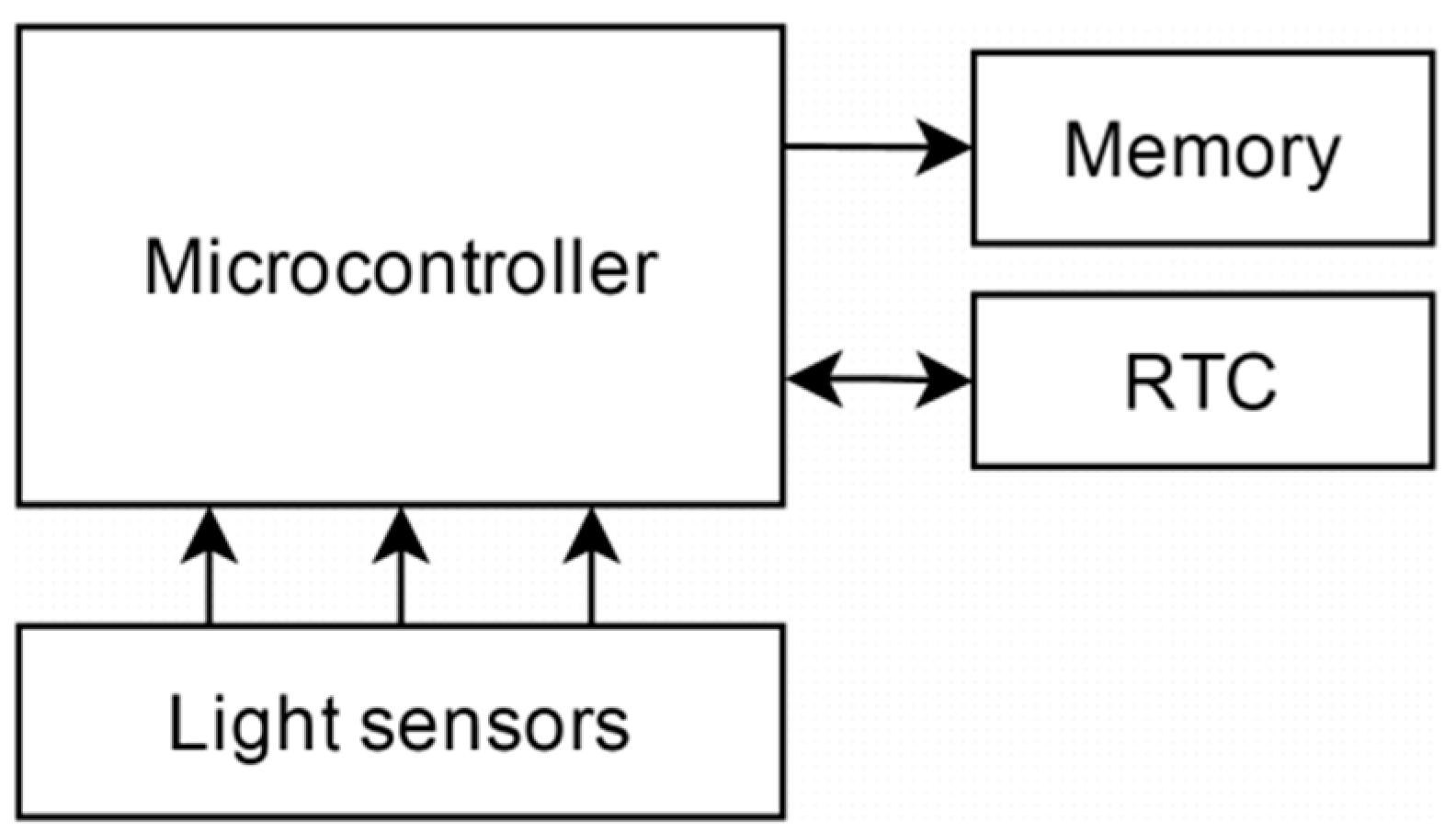
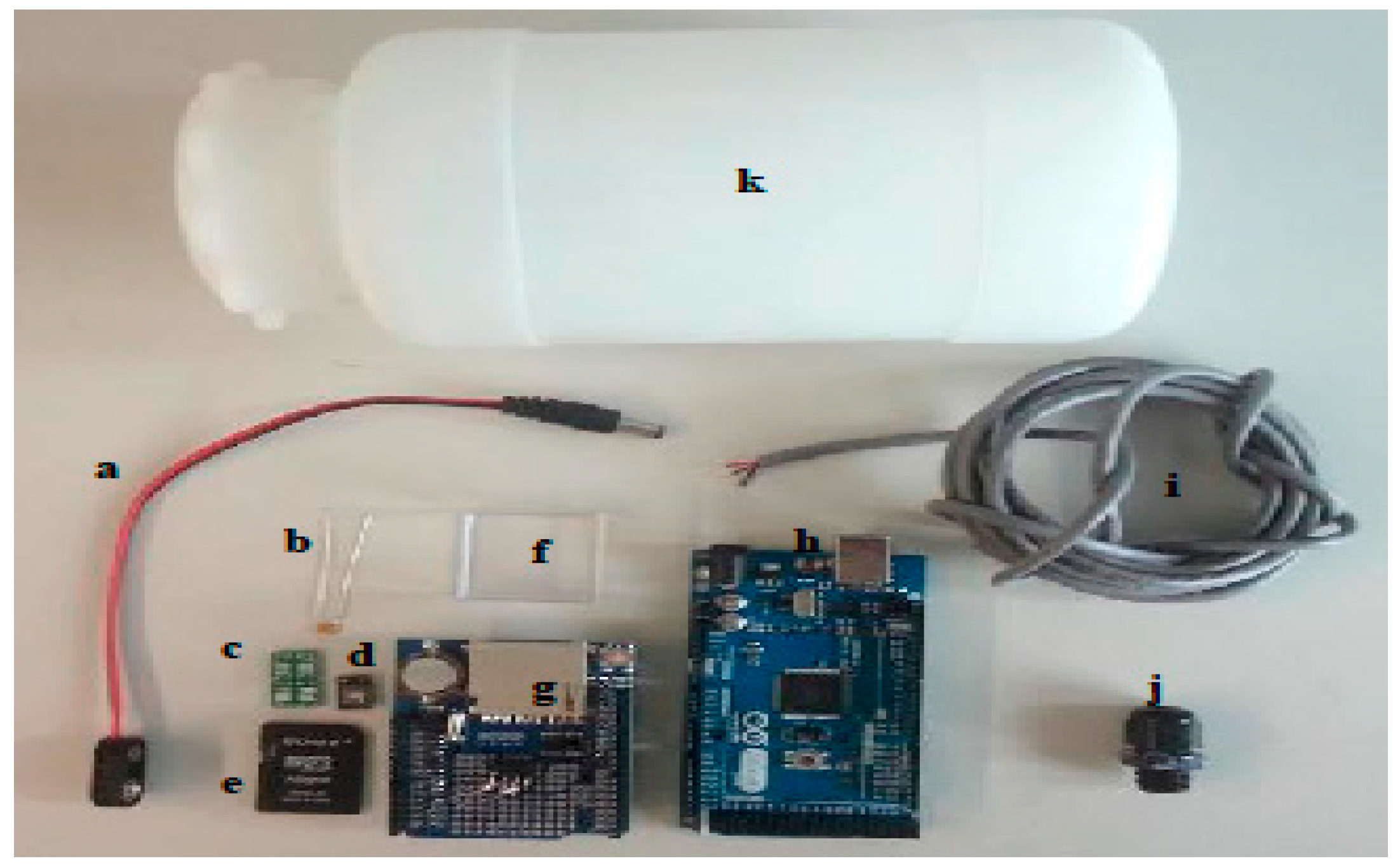
2.2. KdUINO Components
2.3. KdUINO Firmware and Software
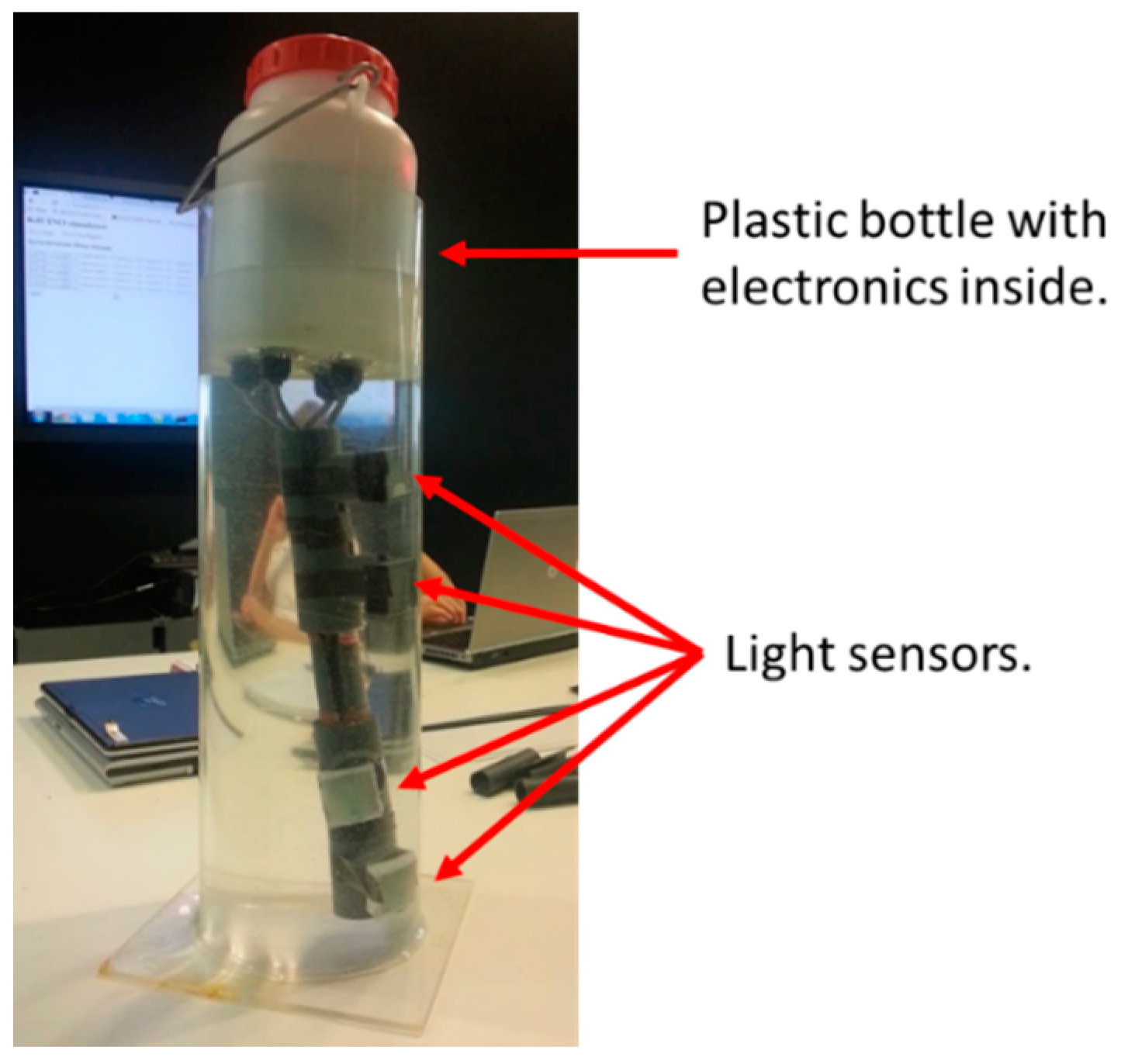
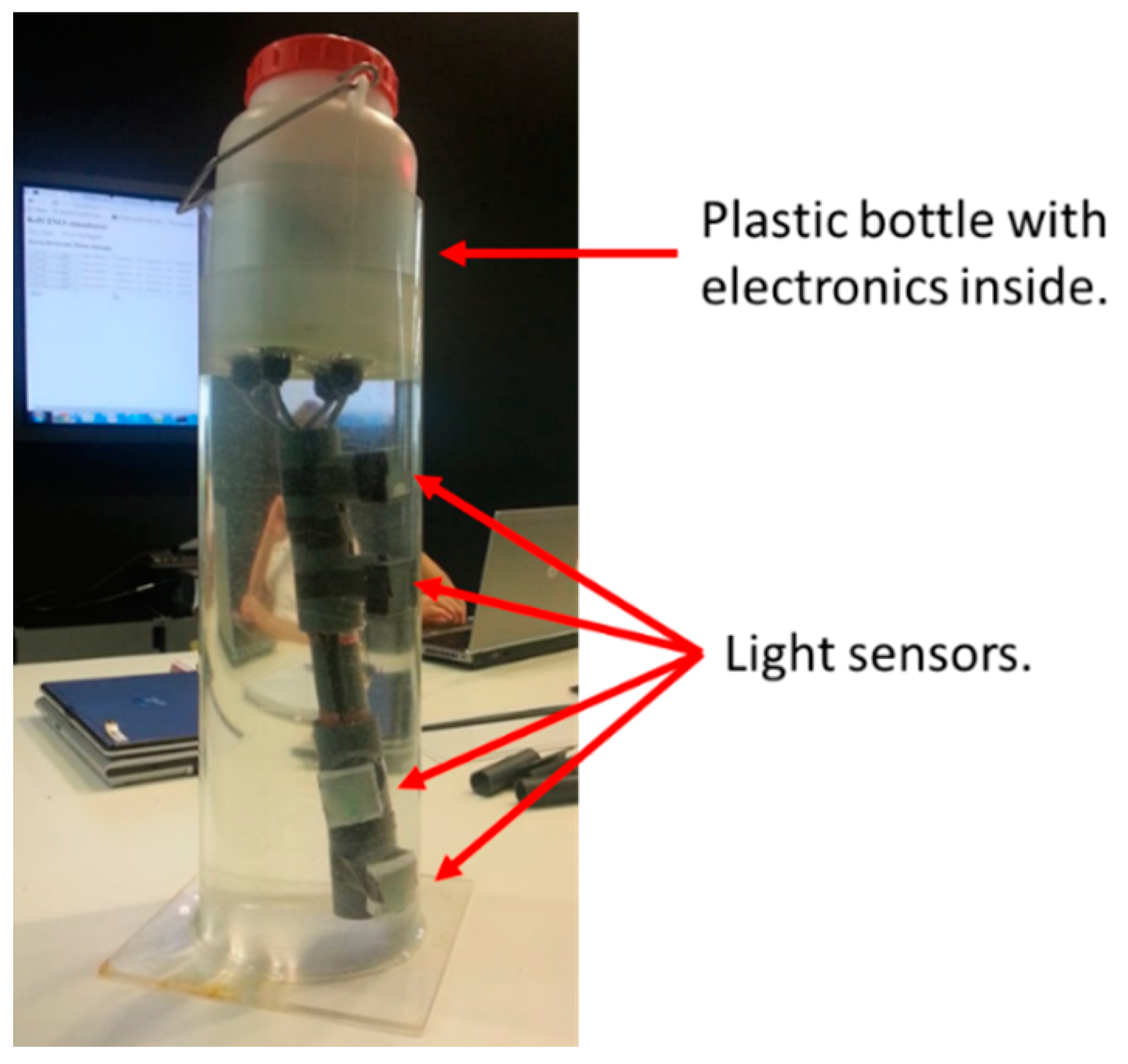
2.4. Building of A KdUINO
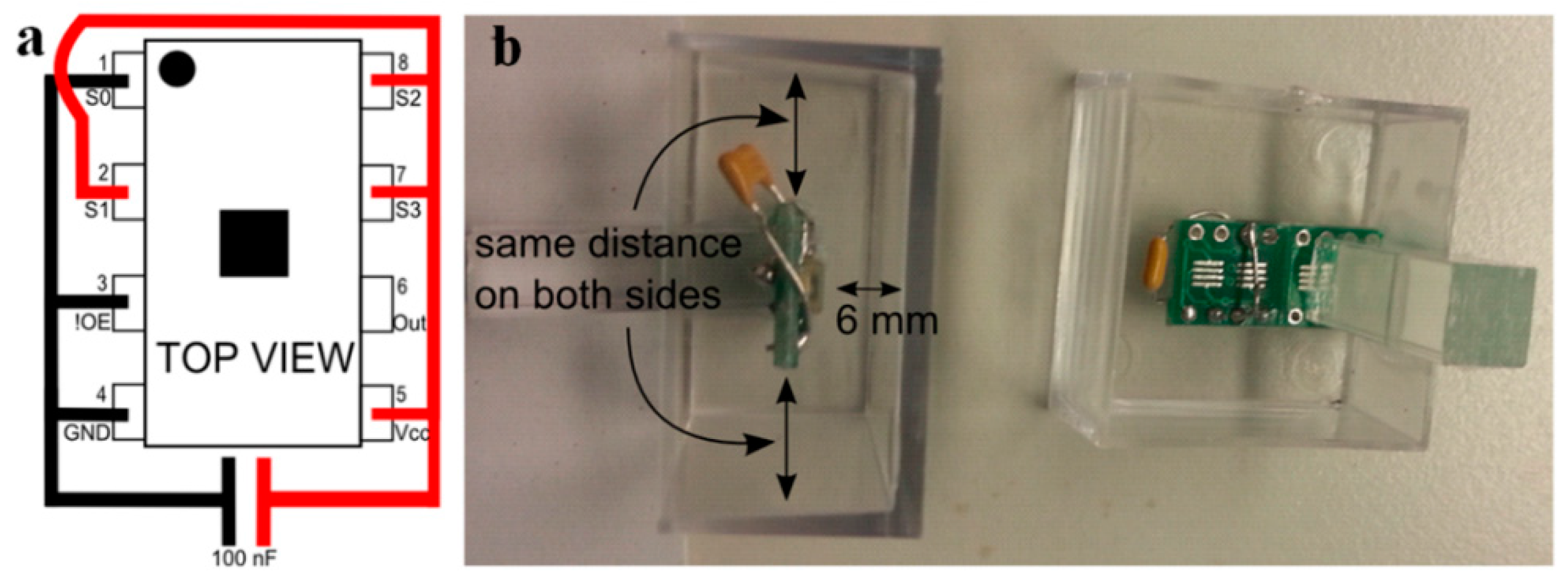
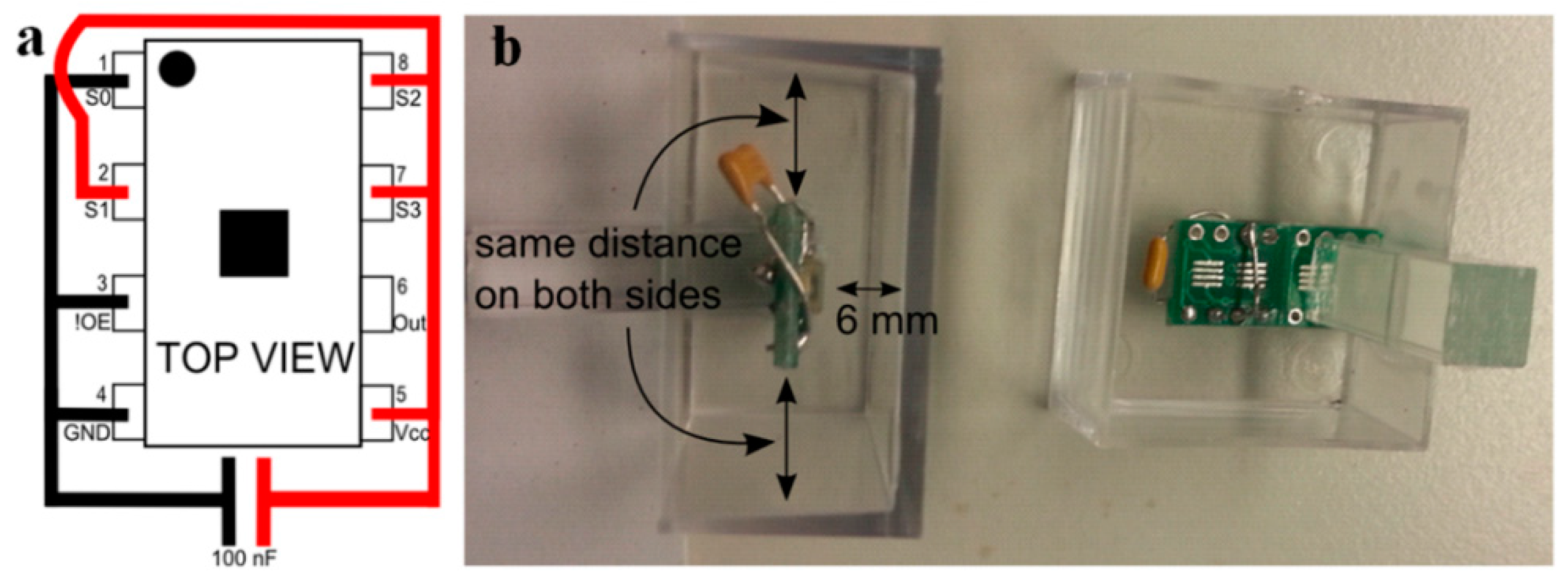
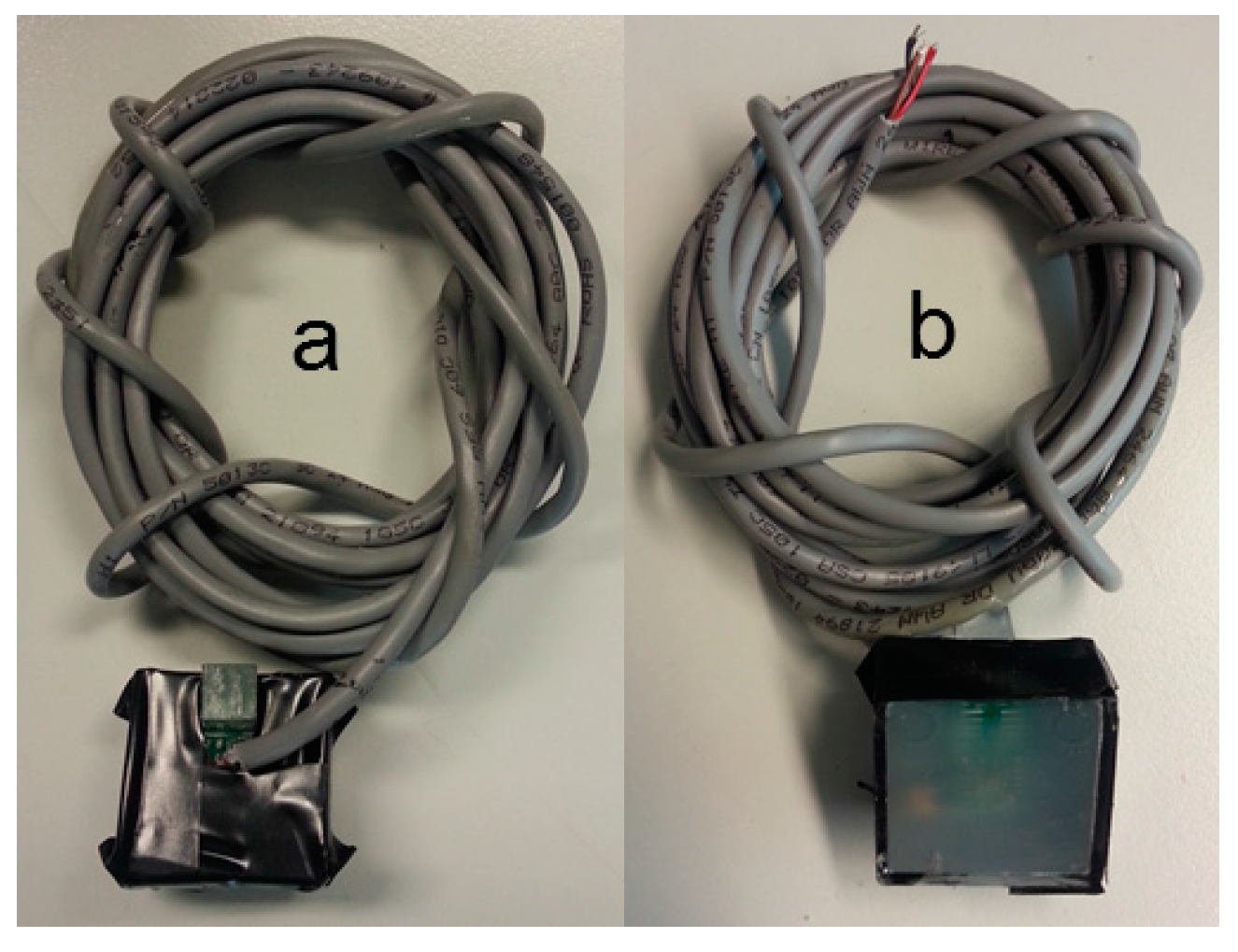
2.4.1. Implementation of the Light Sensors
- S0 = 0, S1 = 1: Configuration of the sensor’s sensitivity at middle level.
- S2 = 1, S3 = 1: Configuration of the output frequency scaling at 100.
- The sensor must point to the base of the box.
- The sensor must be placed parallel to the base of the box.
- The sensor must be placed at the center of the box.
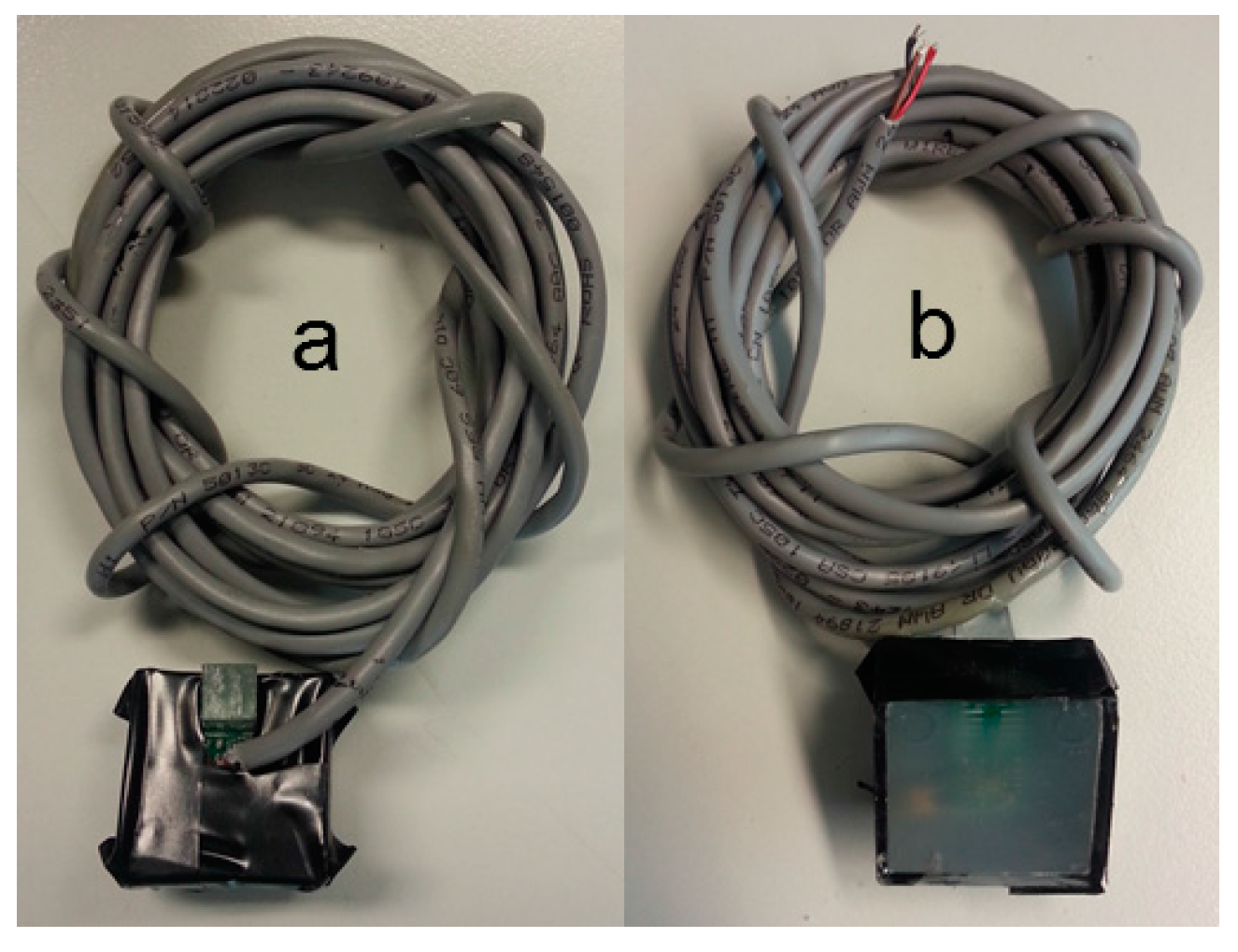
2.4.2. Connection of the Sensor to the Cable
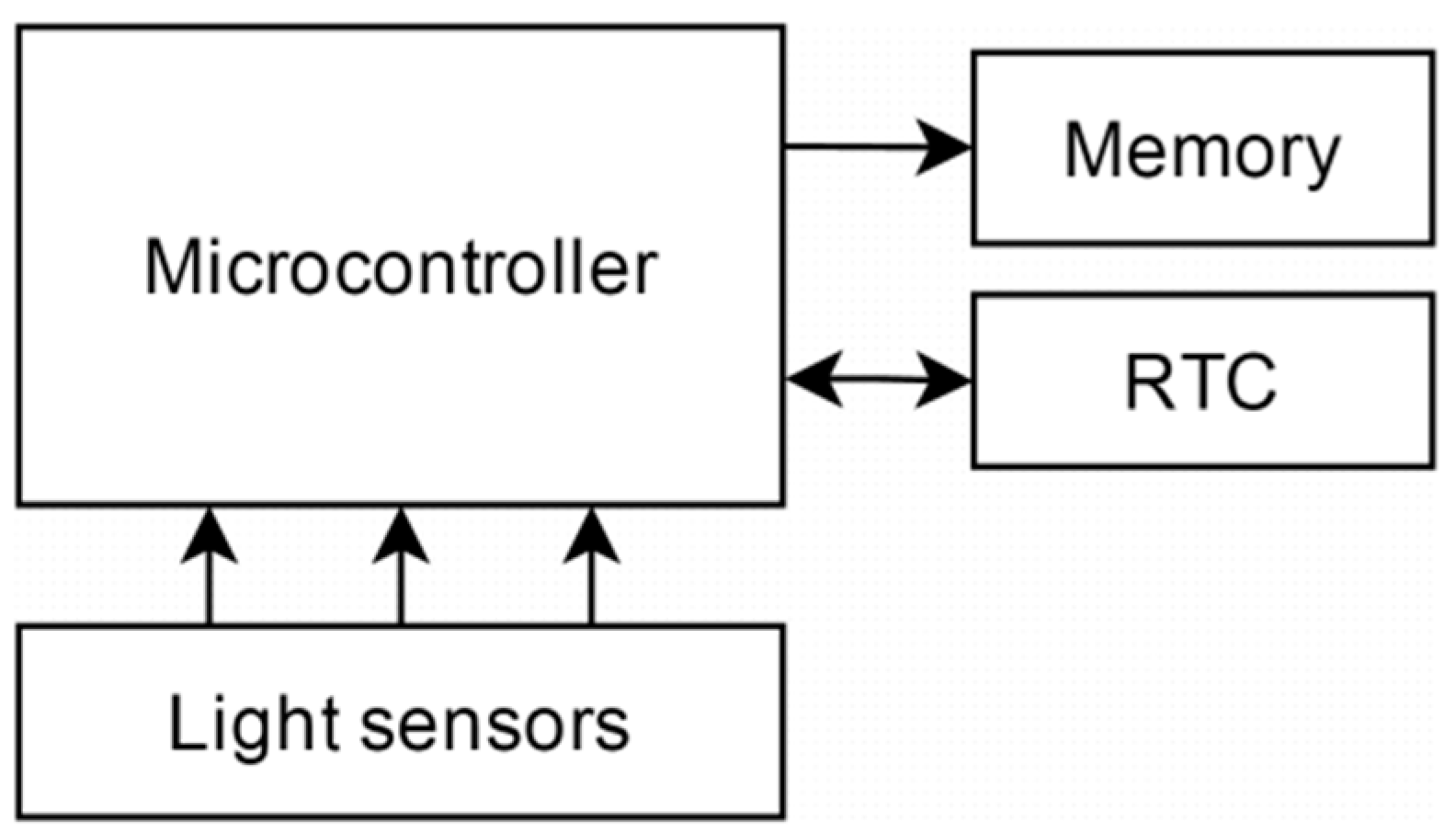
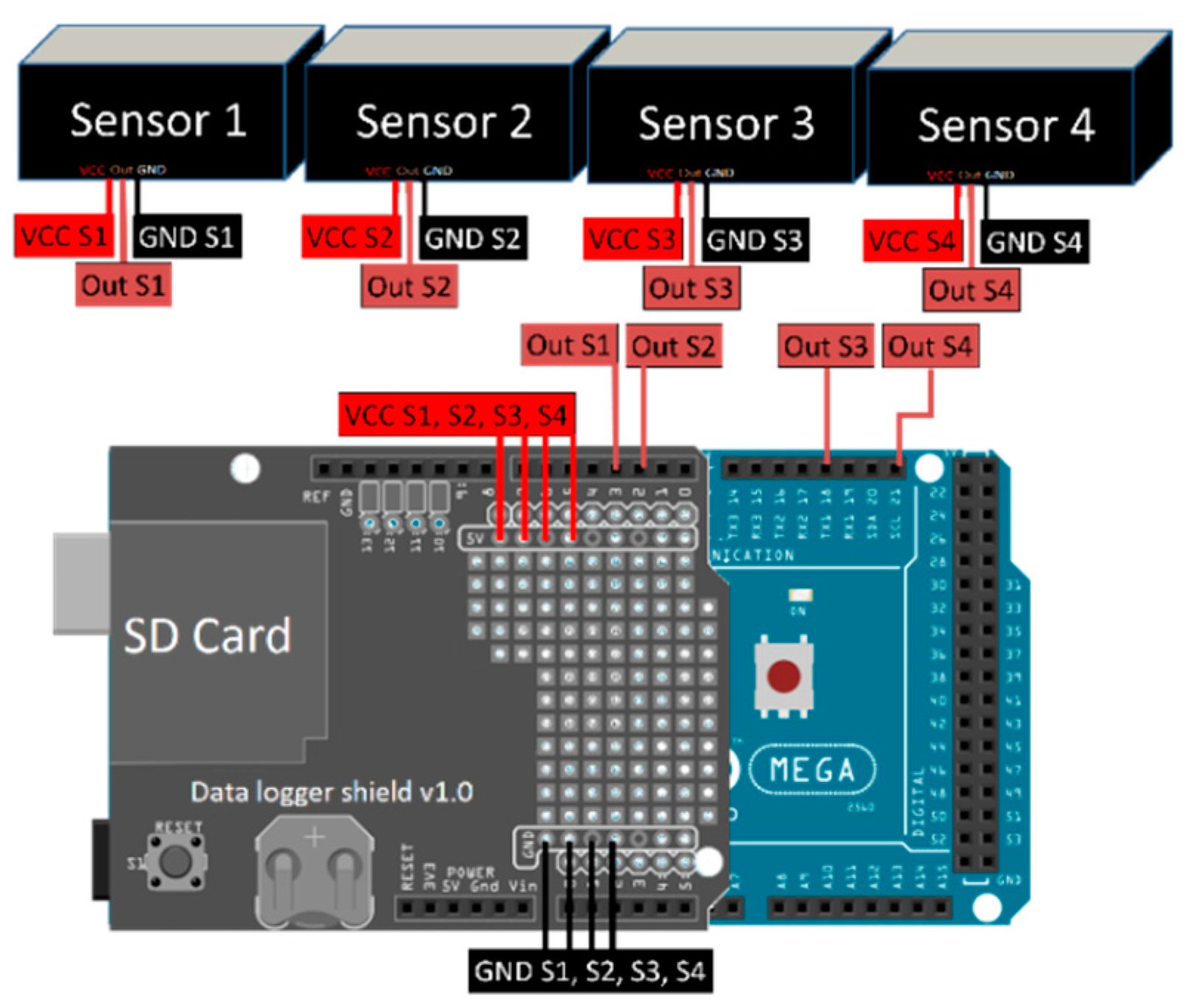
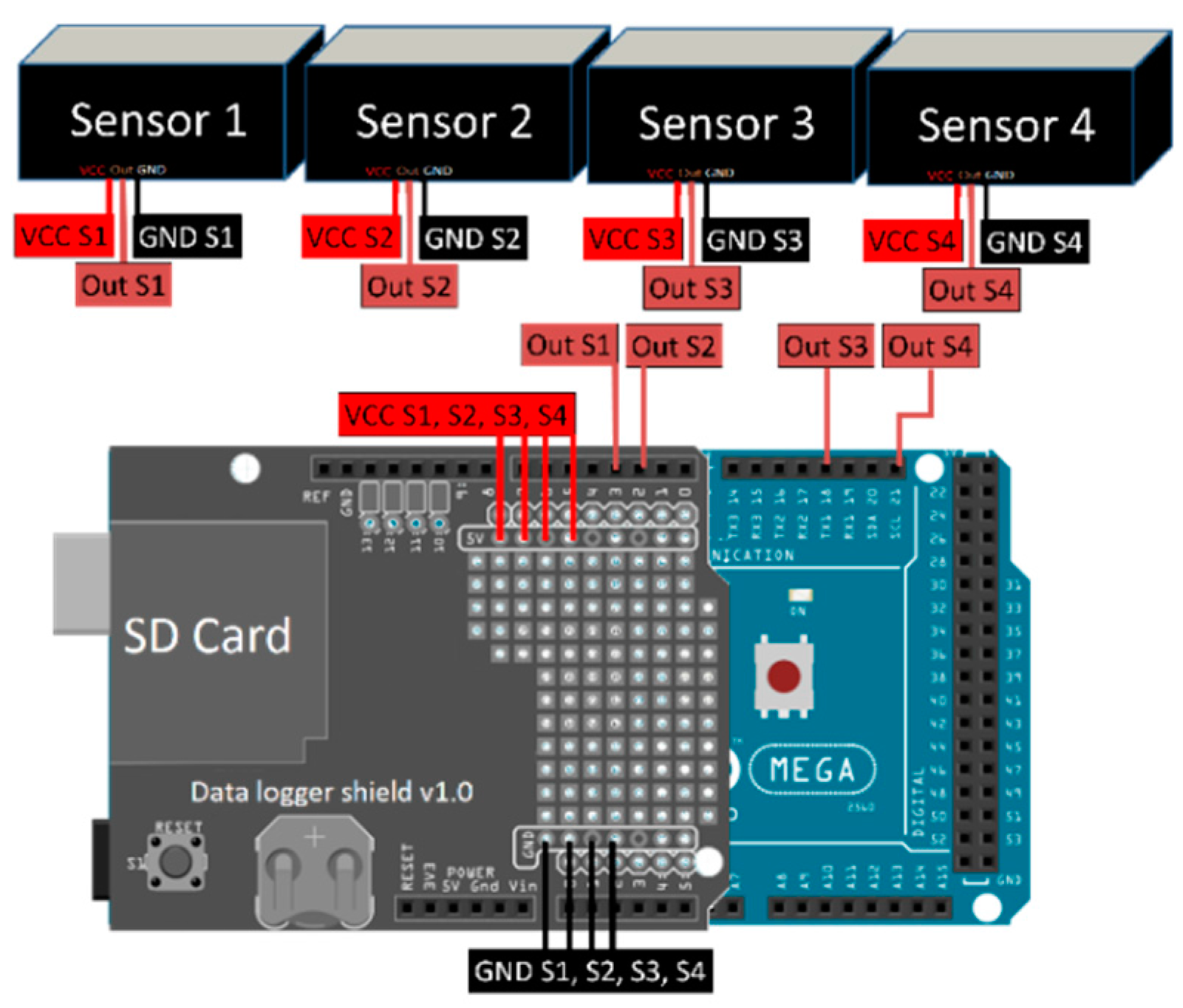
2.4.3. Connection of Electronics
- The Arduino board model Mega (Arduino), because it is the only one with six external interruption pins to connect the optical sensors.
- The Data Logging Shield V1.0 preassembled board (Earl, Adafruit Data Logger Shield, 2015), which includes an RTC to know the date and time of the instrument measurements and an SD memory card adapter that allows saving the data in an SD card. This board is plugged on the Arduino main board.
3. Characterization of the Sensors
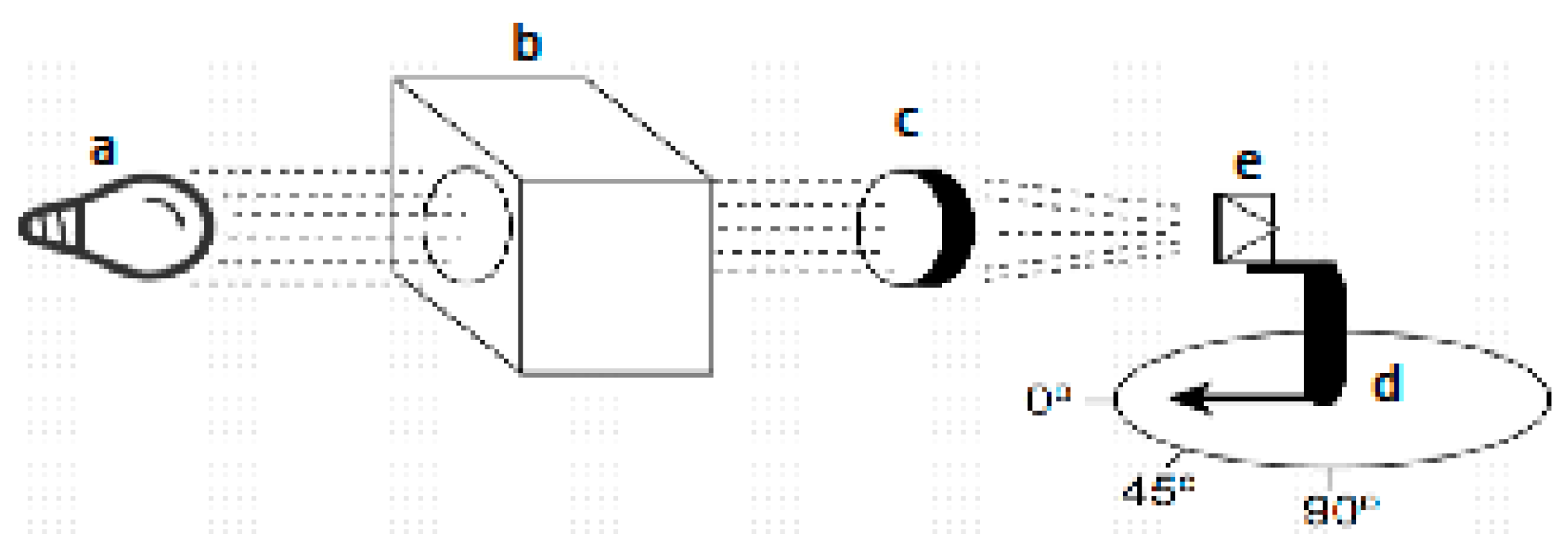
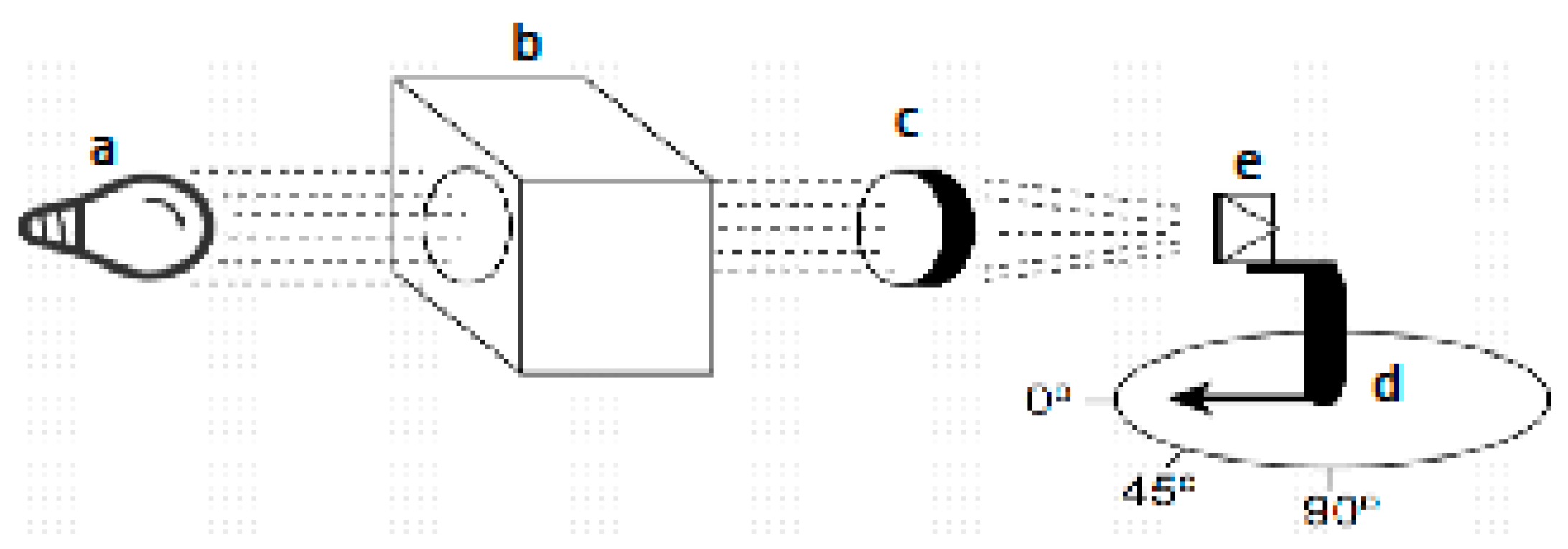
3.1. Darkroom Setup
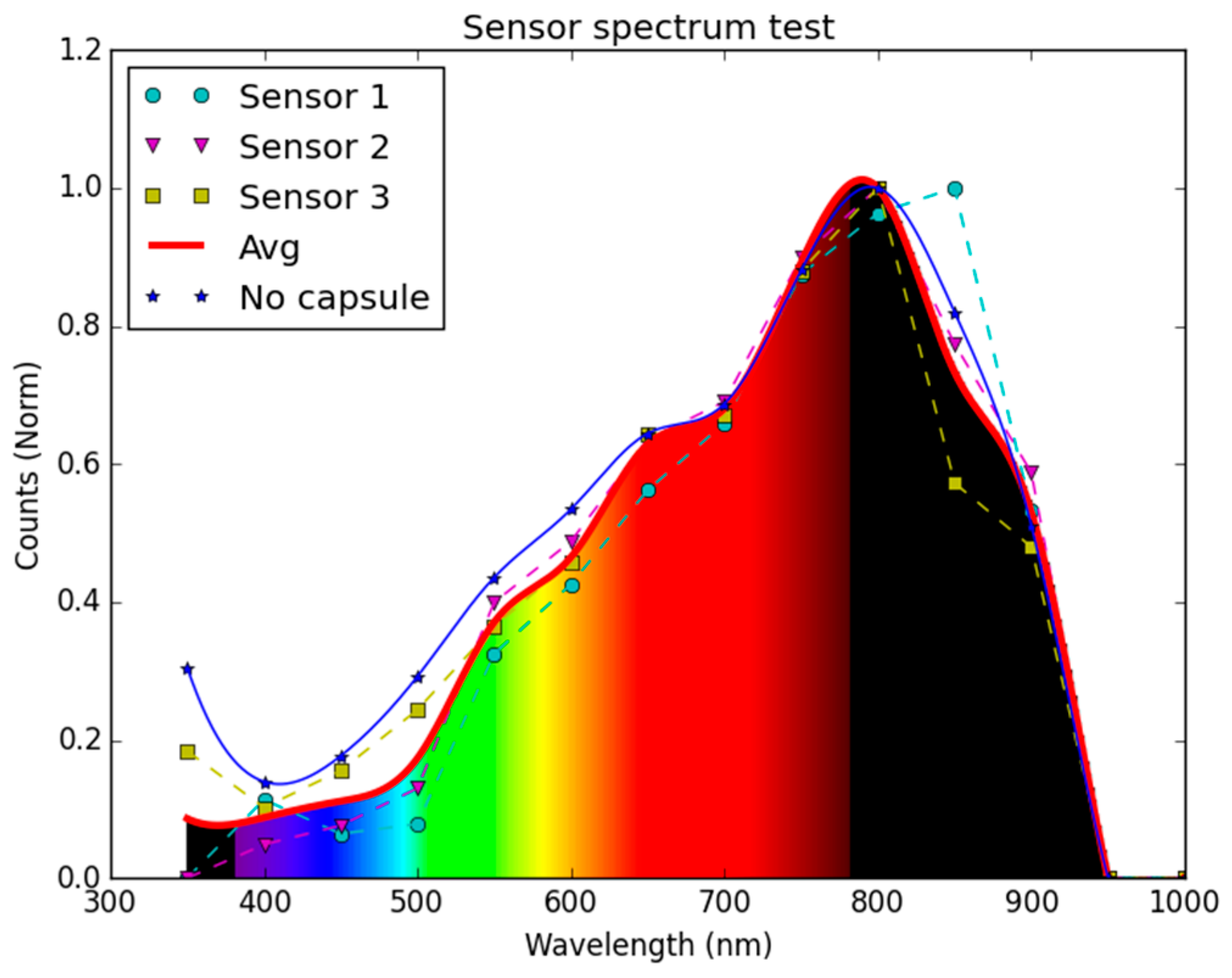
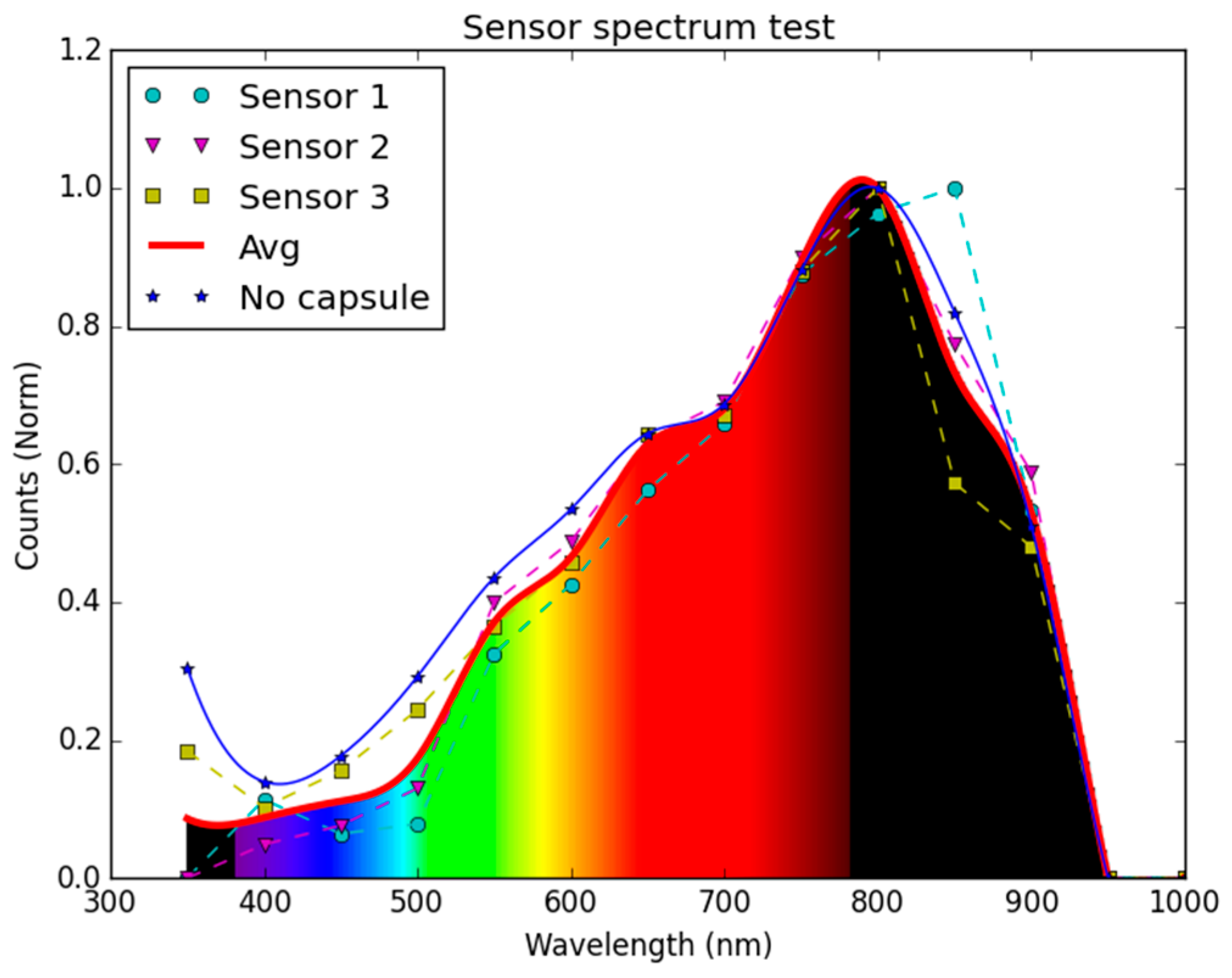
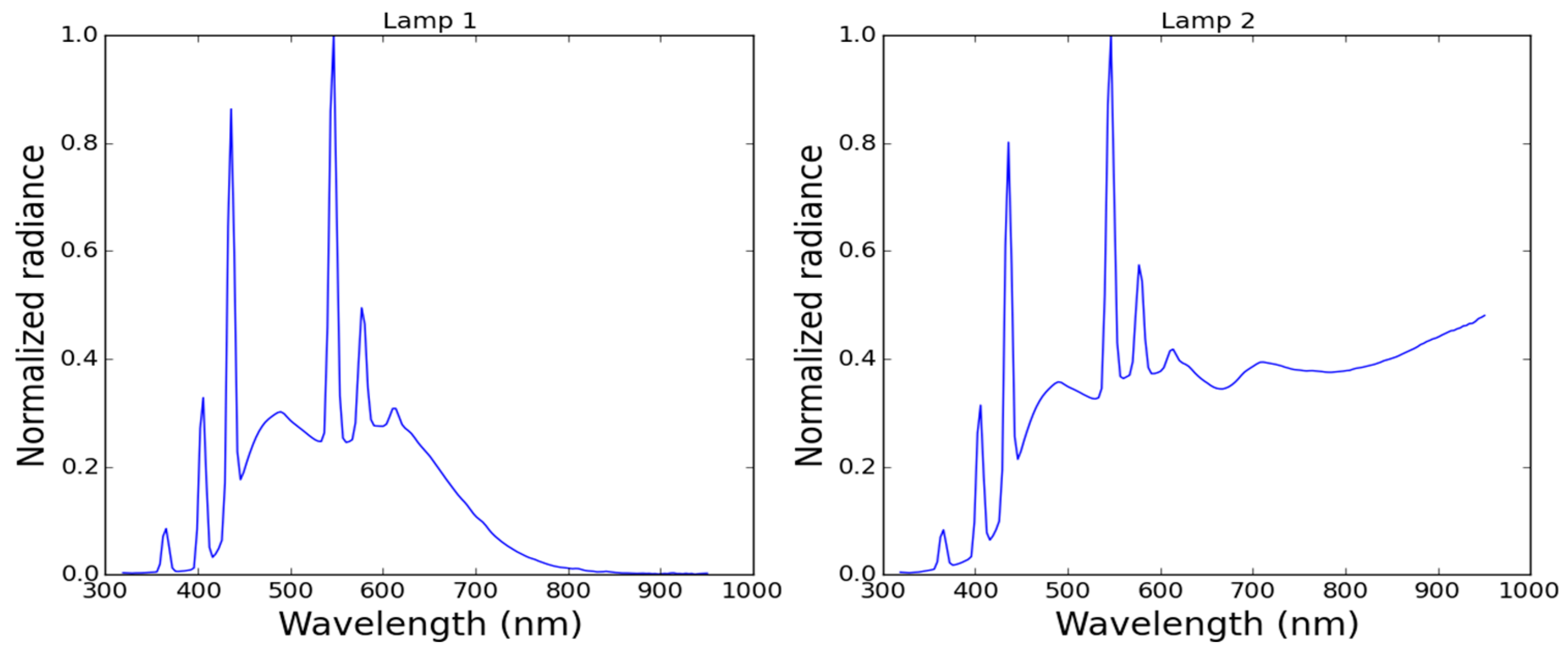
3.1.1. Spectral Characterization
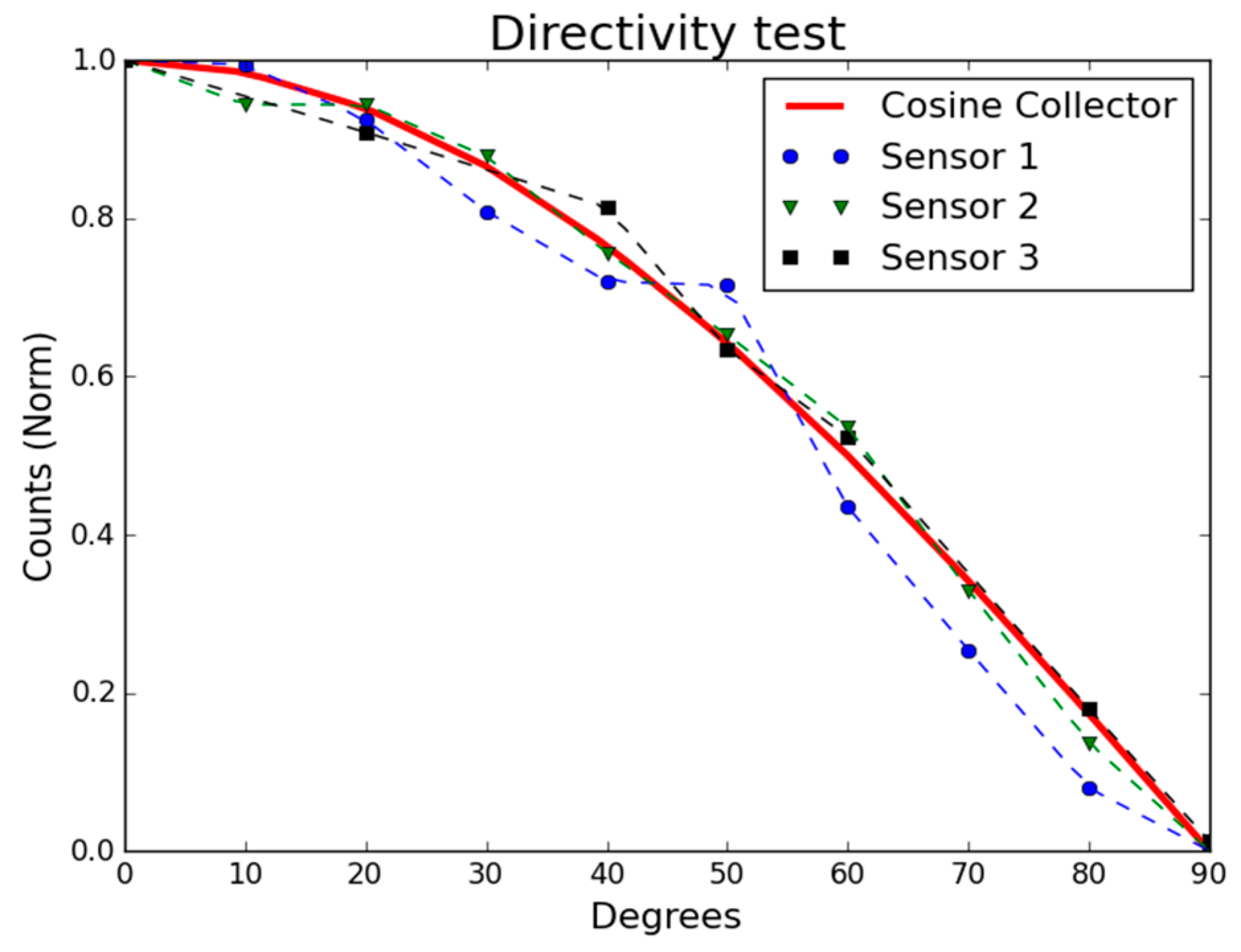
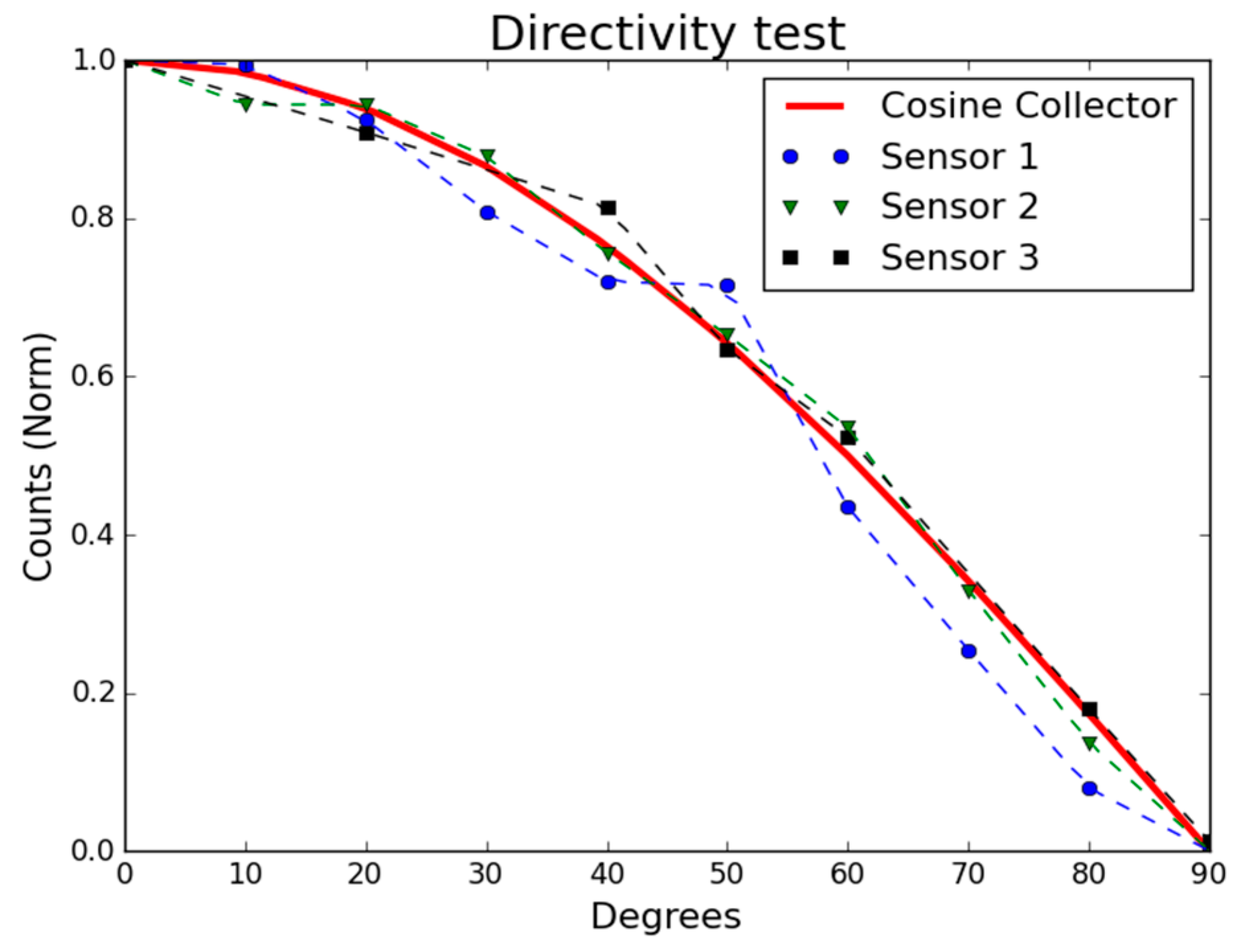
3.1.2. Cosine Characterization
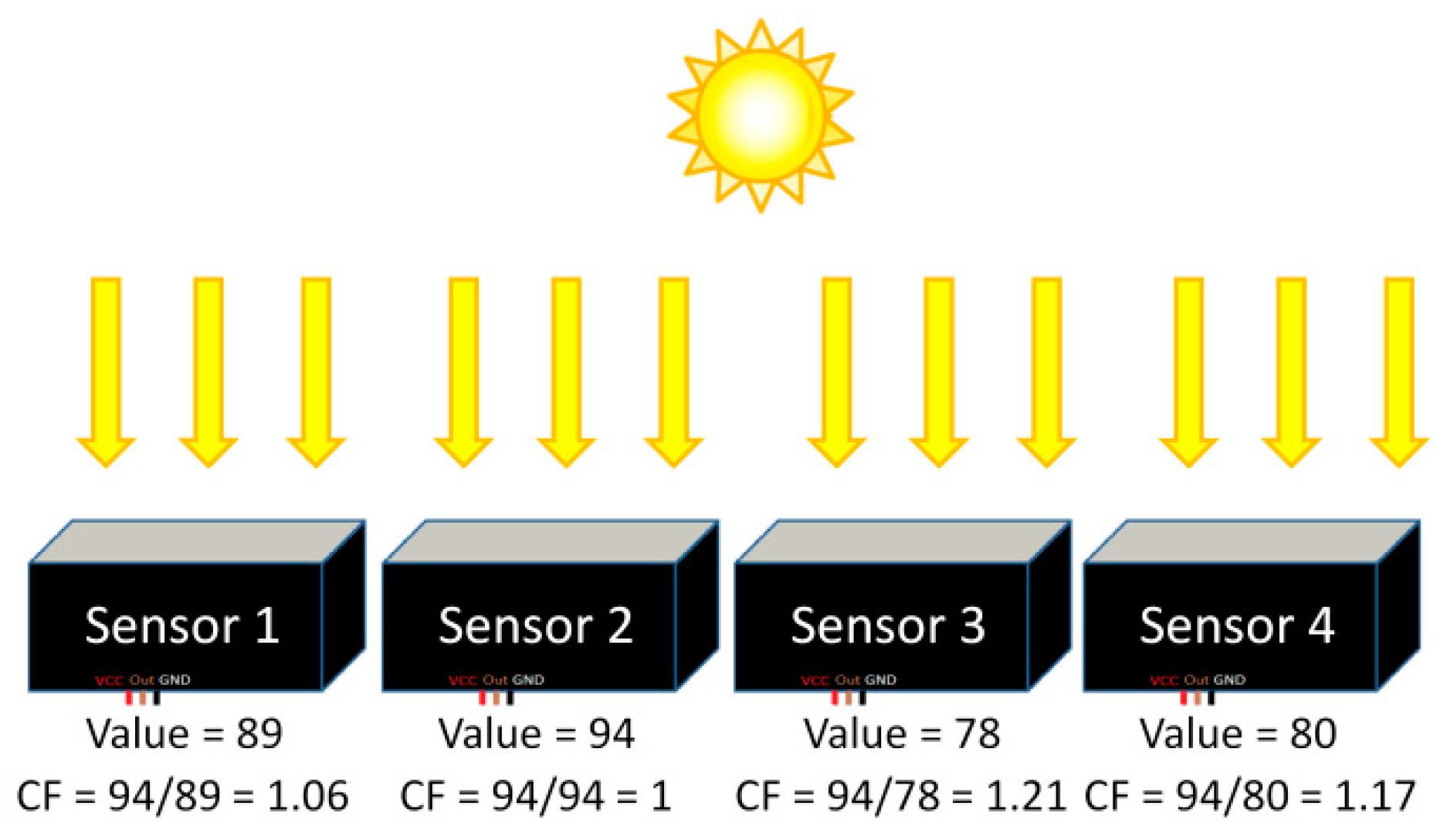
4. Calibration of Sensors
5. Experimental Measurements
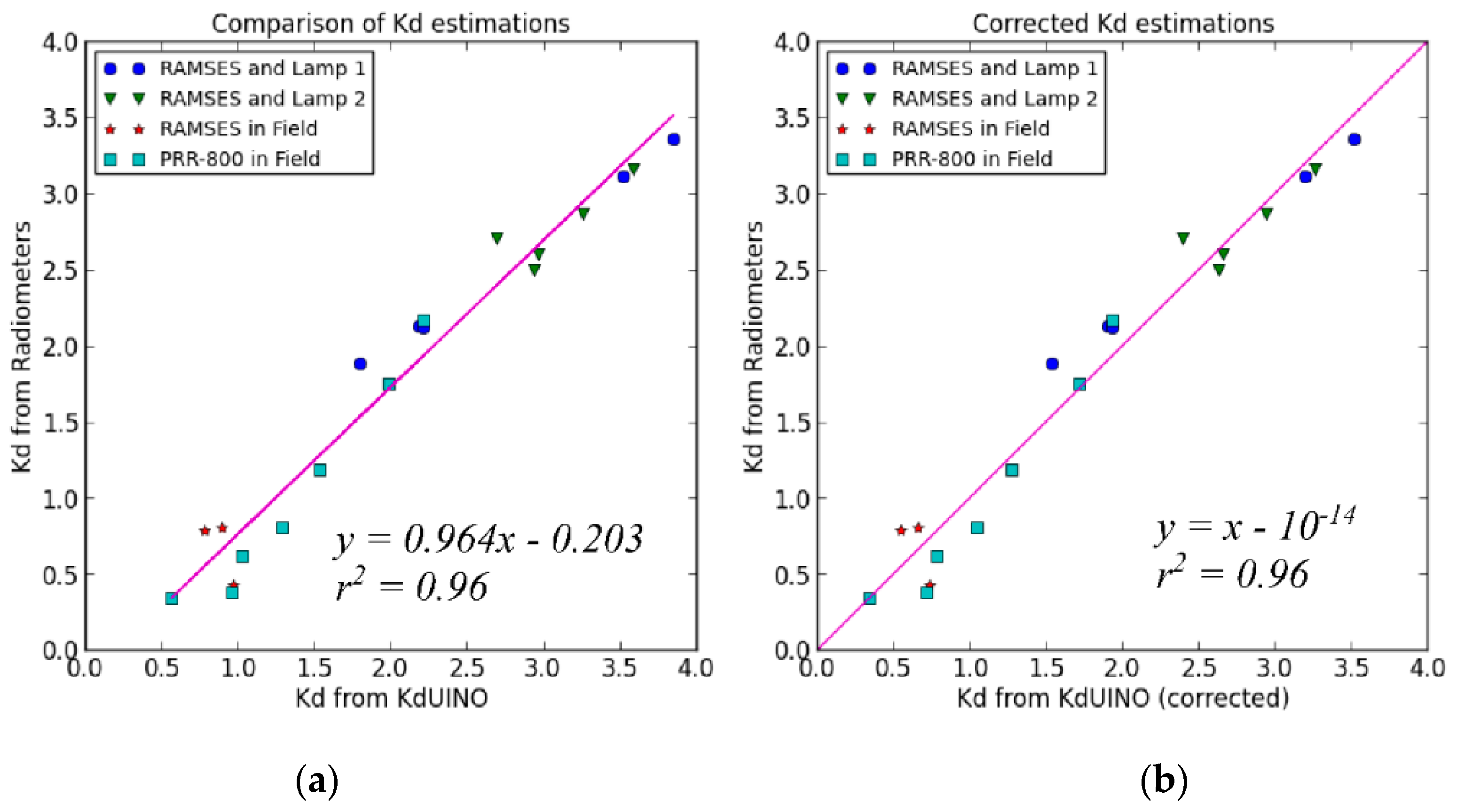
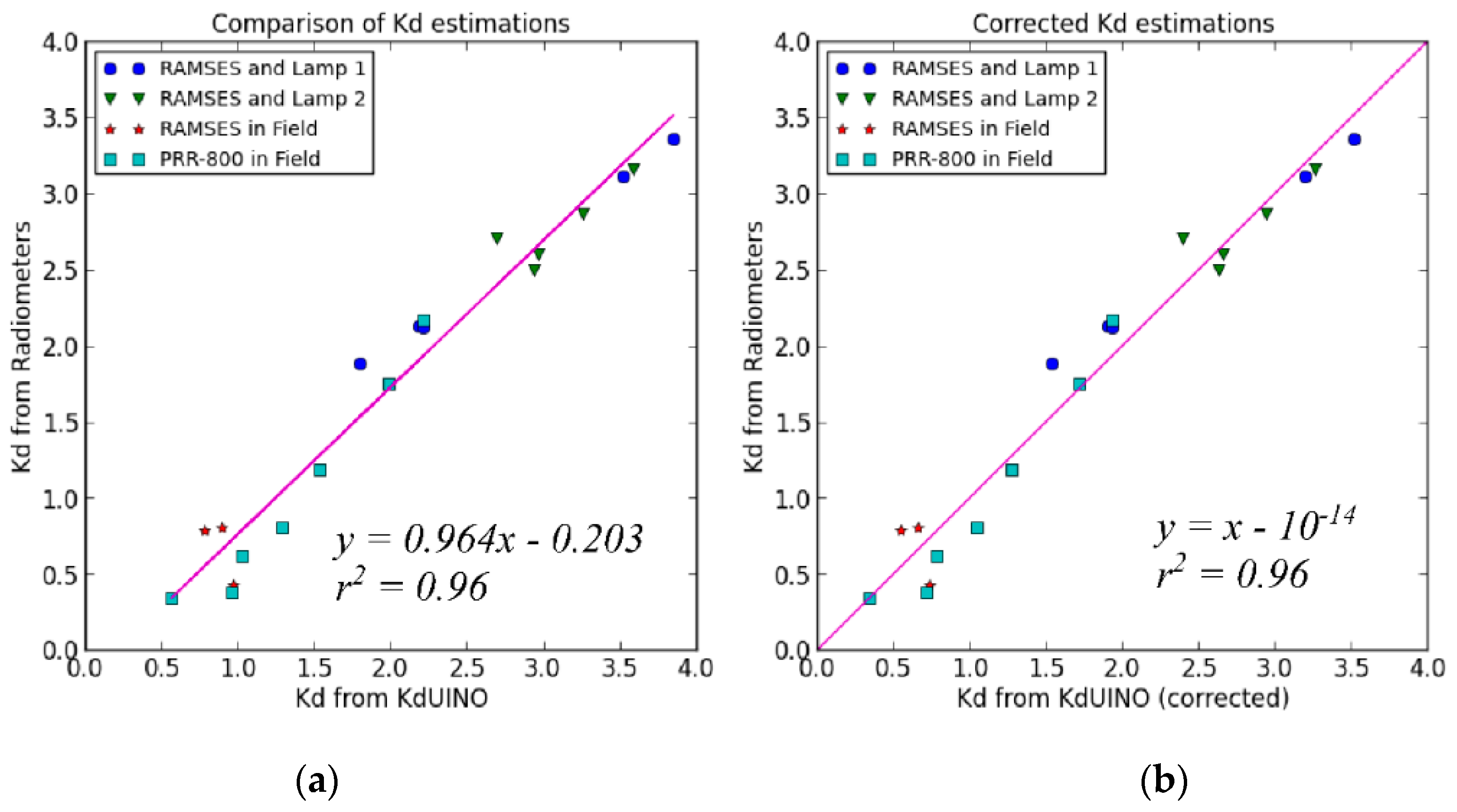
5.1. Validation of KdUINO Measurements of Kd PAR in Laboratory Conditions
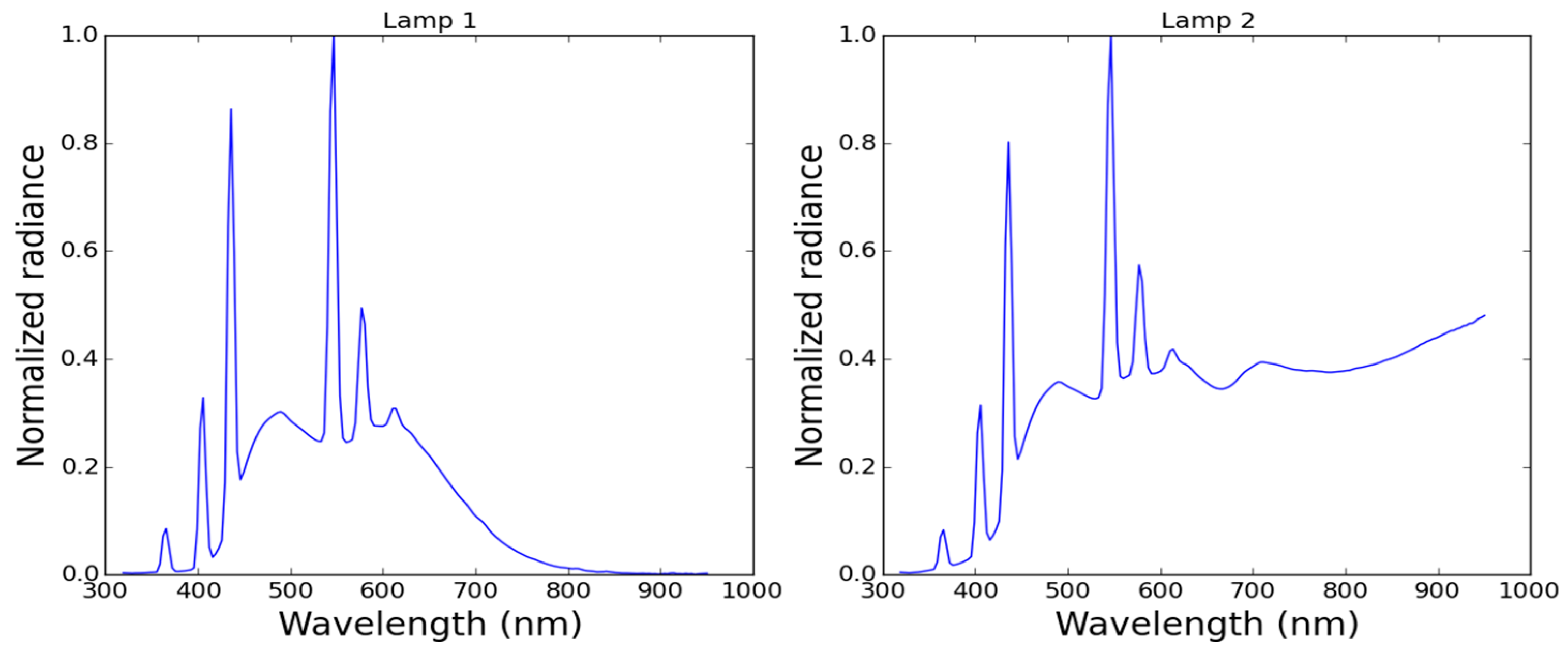
5.1.1. Setup
5.1.2. Measurement Results
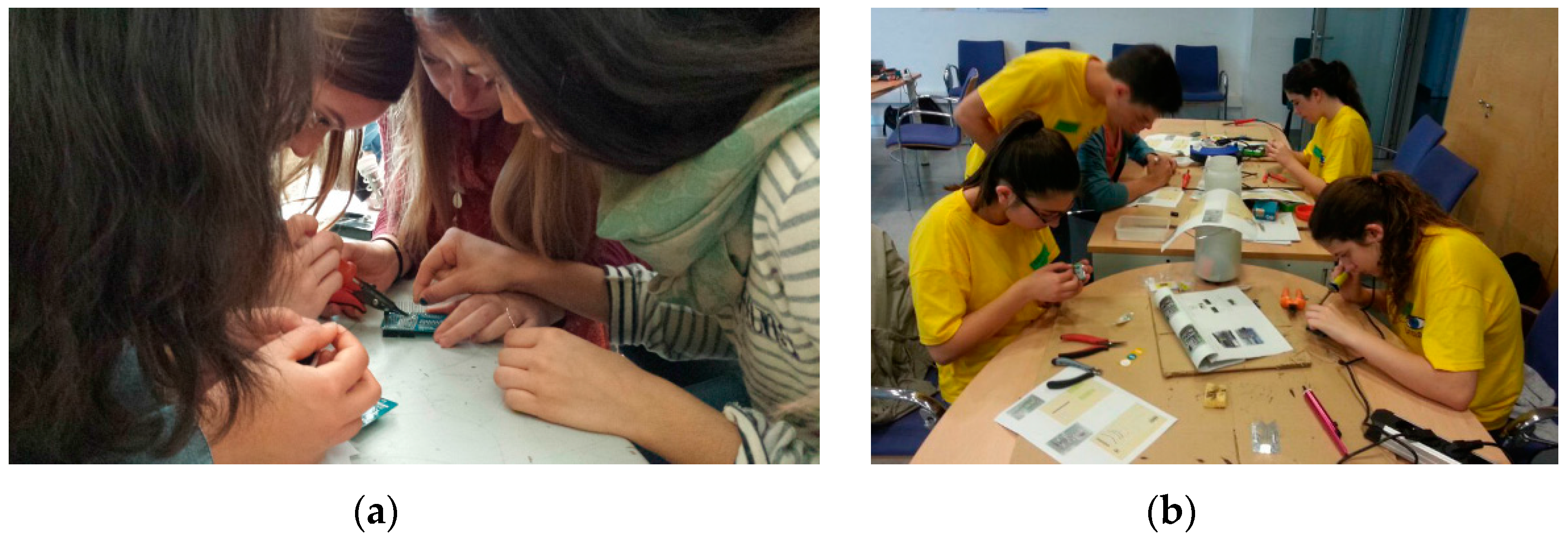
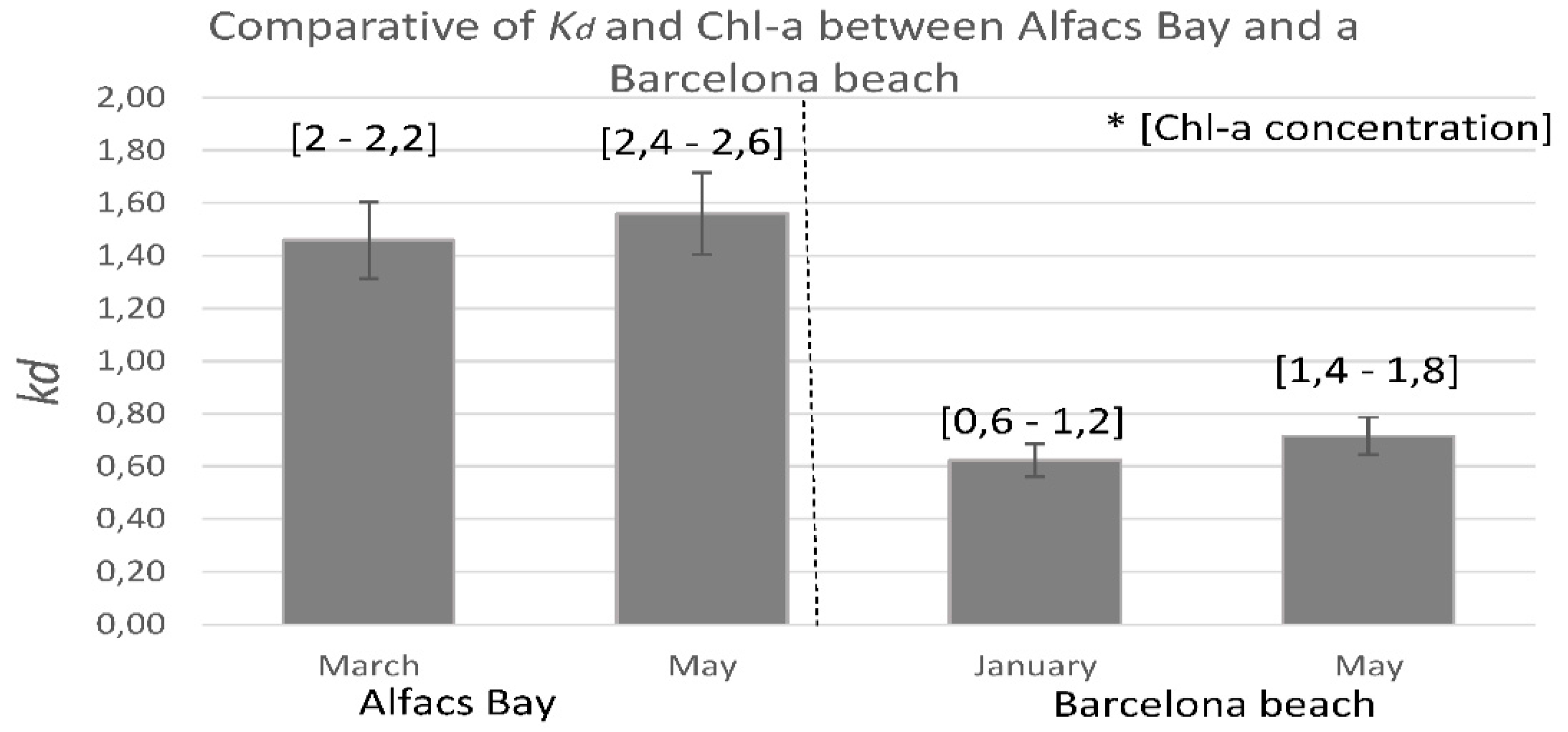
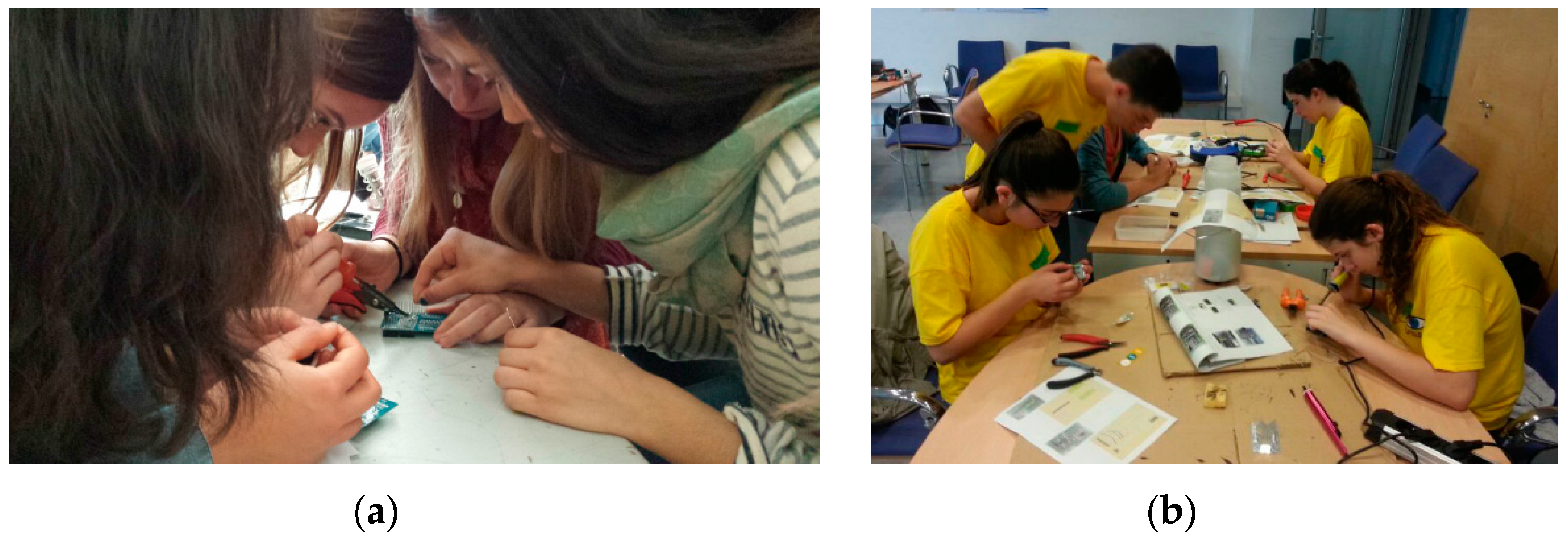
5.2. Testing DIY Construction and Deployment under Field Conditions
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mobley, D. Optical Properties of Water. In Light and Water: Radiative Transfer in Natural Waters; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Sosik, M. Characterizing Seawater Constituents from Optical Properties. In Real-time Coastal Observing Systems for Ecosystem Dynamics and Harmful Algal Blooms; Babin, M., Roesler, C.S., Cullen, J.J., Eds.; UNESCO: Paris, France, 2008; pp. 281–329. [Google Scholar]
- Mishra, D.R.; Narumalani, S.; Rundquist, D.; Lawson, M. Characterizing the vertical diffuse attenuation coefficient for downwelling irradiance in coastal waters: Implications for water penetration by high resolution satellite data. ISPRS J. Photogramm. Remote Sens. 2005, 60, 48–64. [Google Scholar] [CrossRef]
- Shi, K.; Zhang, Y.; Liu, X.; Wang, M.; Qin, B. Remote sensing of diffuse attenuation coefficient of photosynthetically active radiation in Lake Taihu using MERIS data. Remote Sens. Environ. 2014, 140, 365–377. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, B.; Ma, R.; Feng, S.; Le, C. Optically active substances and their contributions to the underwater light climate in Lake Taihu, a large shallow lake in China. Fundam. Appl. Limnol. 2007, 170, 11–19. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Yin, Y.; Wang, M.; Qin, B. Wind and submerged aquatic vegetation influence bio-optical properties in large shallow Lake Taihu, China. J. Geophys. Res. Oceans 2013, 118, 713–727. [Google Scholar] [CrossRef]
- Chang, G.C.; Dickey, T.D.; Schofield, O.M.; Weidemann, A.D.; Boss, E.; Pegau, W.S.; Moline, M.A.; Glenn, M.A. Nearshore physical processes and bio-optical properties in the New York Bight. J. Geophys. Res. Oceans 2002, 107. [Google Scholar] [CrossRef]
- Lee, Z.; Jiang, M.; Davis, C.; Pahlevan, N.; Ahn, Y.; Ma, R. Impact of multiple satellite ocean color samplings in a day on assessing phytoplankton dynamics. Ocean Sci. J. 2012, 47, 323–329. [Google Scholar] [CrossRef]
- Lee, Z.; Shang, B.; Hu, C.; Du, K.; Weidemann, A.; Hou, W.; Lin, J.; Gong, L. Secchi disk depth: A new theory and mechanistic model for underwater visibility. Remote Sens. Environ. 2015, 169, 139–149. [Google Scholar] [CrossRef]
- Kelley, C.D.; Krolick, A.; Brunner, L.; Burklund, A.; Kahn, D.; Ball, W.P.; Weber-Shirk, M. An Affordable Open-Source Turbidimeter. Sensors 2014, 14, 7142–7155. [Google Scholar] [CrossRef] [PubMed]
- Leeuw, T.; Boss, E.S.; Wright, D.L. In situ Measurements of Phytoplankton Fluorescence Using Low Cost Electronics. Sensors 2013, 13, 7872–7883. [Google Scholar] [CrossRef] [PubMed]
- Aymerich, I.F.; Sánchez, A.-M.; Pérez, S.; Piera, J. Analysis of Discrimination Techniques for Low-Cost Narrow-Band Spectrofluorometers. Sensors 2015, 15, 611–634. [Google Scholar] [CrossRef] [PubMed]
- Arduino Mega. Available online: http://arduino.cc/en/Main/arduinoBoardMega (accessed on 11 March 2016).
- Darecki, M.; Stramski, D.; Sokólski, M. Measurements of high-frequency light fluctuations induced by sea surface waves with an Underwater Porcupine Radiometer System. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- TAOS. TSL230RD, TSL230ARD, TSL230BRD Programmable Light-to-Frequency Converters. TAOS054P Datasheet, 2007. Available online: http://www.datasheetlib.com/datasheet/1151779/tsl230ard_taos-texas-advanced-optoelectronic-solutions.html (accessed on 11 March 2016).
- Adafruit Data Logger Shield. Available online: https://learn.adafruit.com/adafruit-data-logger-shield (accessed on 11 March 2016).
- Numpy. Available online: http://www.numpy.org/ (accessed on 11 March 2016).
- Matplotlib. Available online: http://matplotlib.org/ (accessed on 11 March 2016).
- Scipy. Available online: http://www.scipy.org/ (accessed on 11 March 2016).
- Pegau, W.S.; Gray, D.; Ronald, W.S.; Zaneveld, V. Absorption and attenuation of visible and near-infrared light in water: Dependence on temperature and salinity. Appl. Opt. 1997, 36, 6035–6046. [Google Scholar] [CrossRef] [PubMed]
- Biospherical Instruments Inc. PRR-800 Profiling Reflectance Radiometer. Available online: http://www.biospherical.com/BSI%20PDFs/Brochures/prr-800.pdf (accessed on 11 March 2016).
- TriOs Optical Sensors. RAMSES-ACC-VIS Hyperspectral UV-VIS Irradiance Sensor. Available online: http://www.rshydro.ie/resdev/Ramses-ACC-VIS-pr-629.html (accessed on 11 March 2016).
- Fernández, M.; Castan, V.; Dàmaso, E. Report of Toxic Phytoplankton Monitoring and Environmental Parameters in Ebro Delta Bays; Technical Report; Institute of Research and Technology of Food and Agriculture (IRTA): Tarragona, Spain, 2015. (In Catalan) [Google Scholar]
- Arin, L.; Guillén, J.; Segura-Noguera, M.; Estrada, M. Open sea hydrographic forcing of nutrient and phytoplankton dynamics in a Mediterranean coastal ecosystem. Estuar. Coast. Shelf Sci. 2013, 133, 116–128. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Source | Price Per Unit |
|---|---|---|
| 1 × Arduino MEGA 2560 R3 [13] | www.aliexpress.com | $9.80 |
| 4 × TSL230RP [15] | www.es.rs-online.com (store ref. 642–4395) | $3.31 |
| 4 × 100 nF Capacitor | www.es.rs-online.com (store ref. 699–4891) | $0.44 |
| 4 × 8 pin SOIC to DIP8 Adapter | www.aliexpress.com | $0.08 |
| 132 mL × Synolite and catalyst | www.drogueriaboter.es | $19.72 (1 L) |
| 6.4 m × Industrial cable, 3 cores | www.es.rs-online.com (store ref. 168–0146) | $1.45/m |
| 4 × Polyester transparent box (29 mm × 29 mm × 15 mm) | www.servicioestacion.es | $0.63 |
| 1 × Data Logger Module Logging Recorder Shield V1.0 (Earl, Adafruit Data Logger Shield, 2015) | www.aliexpress.com | $5.45 |
| 1 × 9 V Battery button power plug for Arduino | www.aliexpress.com | $2.35 (2 units) |
| 1 × SD memory card (8 GBytes) | www.aliexpress.com | $5.63 |
| 1 × Hermetic bottle | www.servicioestacion.es | $6 |
| 4 × Cable Gland Nylon 66, IP68, M12 × 1.25 | www.es.rs-online.com (store ref. 669–4654) | $3.47 (5 units) |
| Total in US dollars | $60.57 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bardaji, R.; Sánchez, A.-M.; Simon, C.; Wernand, M.R.; Piera, J. Estimating the Underwater Diffuse Attenuation Coefficient with a Low-Cost Instrument: The KdUINO DIY Buoy. Sensors 2016, 16, 373. https://doi.org/10.3390/s16030373
Bardaji R, Sánchez A-M, Simon C, Wernand MR, Piera J. Estimating the Underwater Diffuse Attenuation Coefficient with a Low-Cost Instrument: The KdUINO DIY Buoy. Sensors. 2016; 16(3):373. https://doi.org/10.3390/s16030373
Chicago/Turabian StyleBardaji, Raul, Albert-Miquel Sánchez, Carine Simon, Marcel R. Wernand, and Jaume Piera. 2016. "Estimating the Underwater Diffuse Attenuation Coefficient with a Low-Cost Instrument: The KdUINO DIY Buoy" Sensors 16, no. 3: 373. https://doi.org/10.3390/s16030373
APA StyleBardaji, R., Sánchez, A.-M., Simon, C., Wernand, M. R., & Piera, J. (2016). Estimating the Underwater Diffuse Attenuation Coefficient with a Low-Cost Instrument: The KdUINO DIY Buoy. Sensors, 16(3), 373. https://doi.org/10.3390/s16030373