
Standalone GPS L1 C/A Receiver for Lunar Missions


 ,
,
Abstract
:1. Introduction
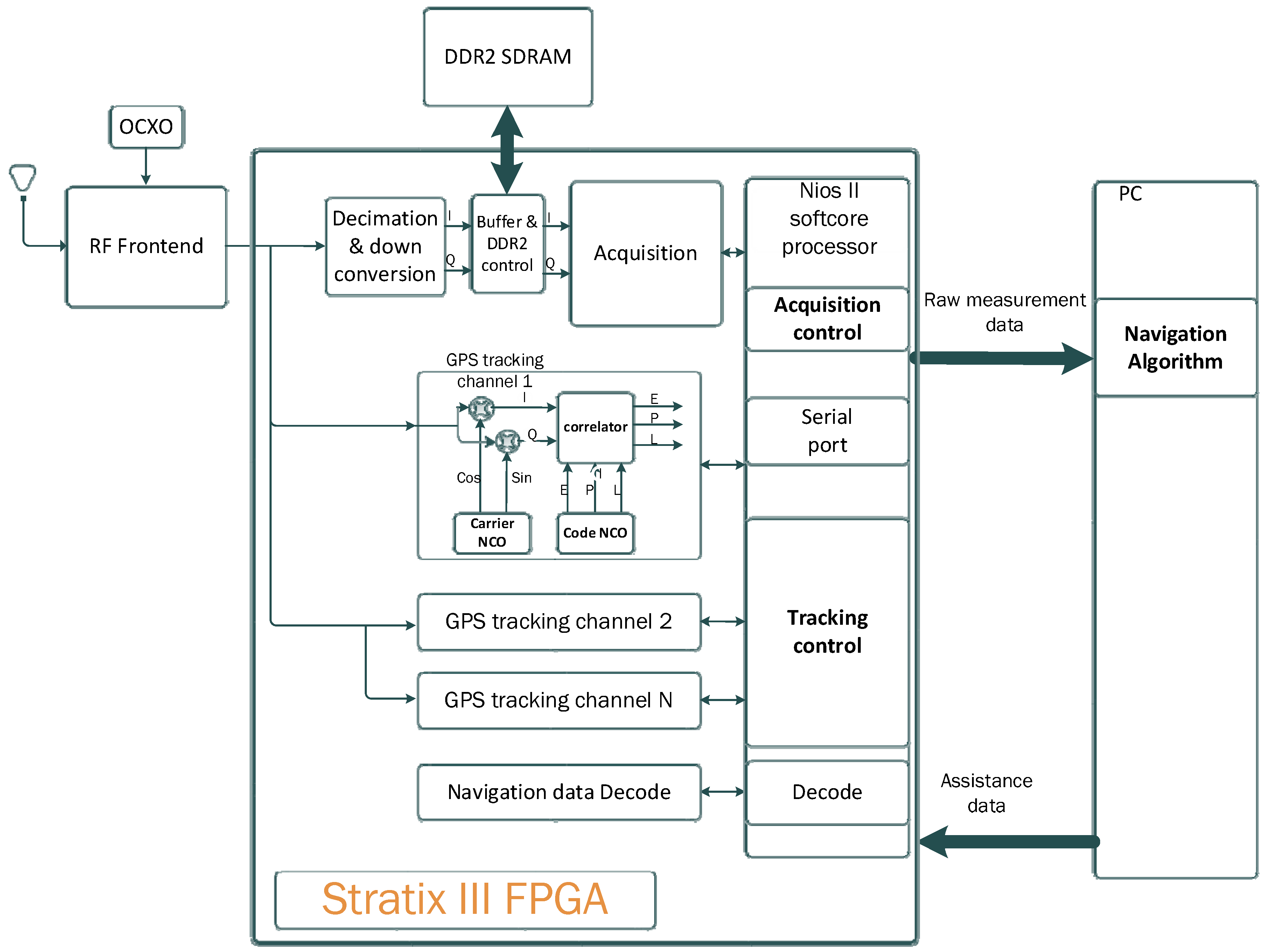
2. The WeakHEO Receiver Architecture
- A tri-band (L1, L2, L5) RF front end, which amplifies, filters and down converts the GNSS signals to an intermediate frequency (IF) where they are sampled. The reported initial implementation is focused on processing and utilisation of the GPS L1 C/A code signal. However, a triple frequency L1, L2, L5 front end (an early version of the front end in [18]) was selected to allow future expansion to these frequencies. A high sampling rate is used to enable the receiver to support precision tracking architectures and additional wider bandwidth signals in the future. A common IF frequency of 53.78 MHz is used for all three bands and signals are sampled at 40.96 MHz with 4-bit resolution. The RF front is driven by a stable, low-phase noise Oven Controlled Crystal Oscillator (OXCO).
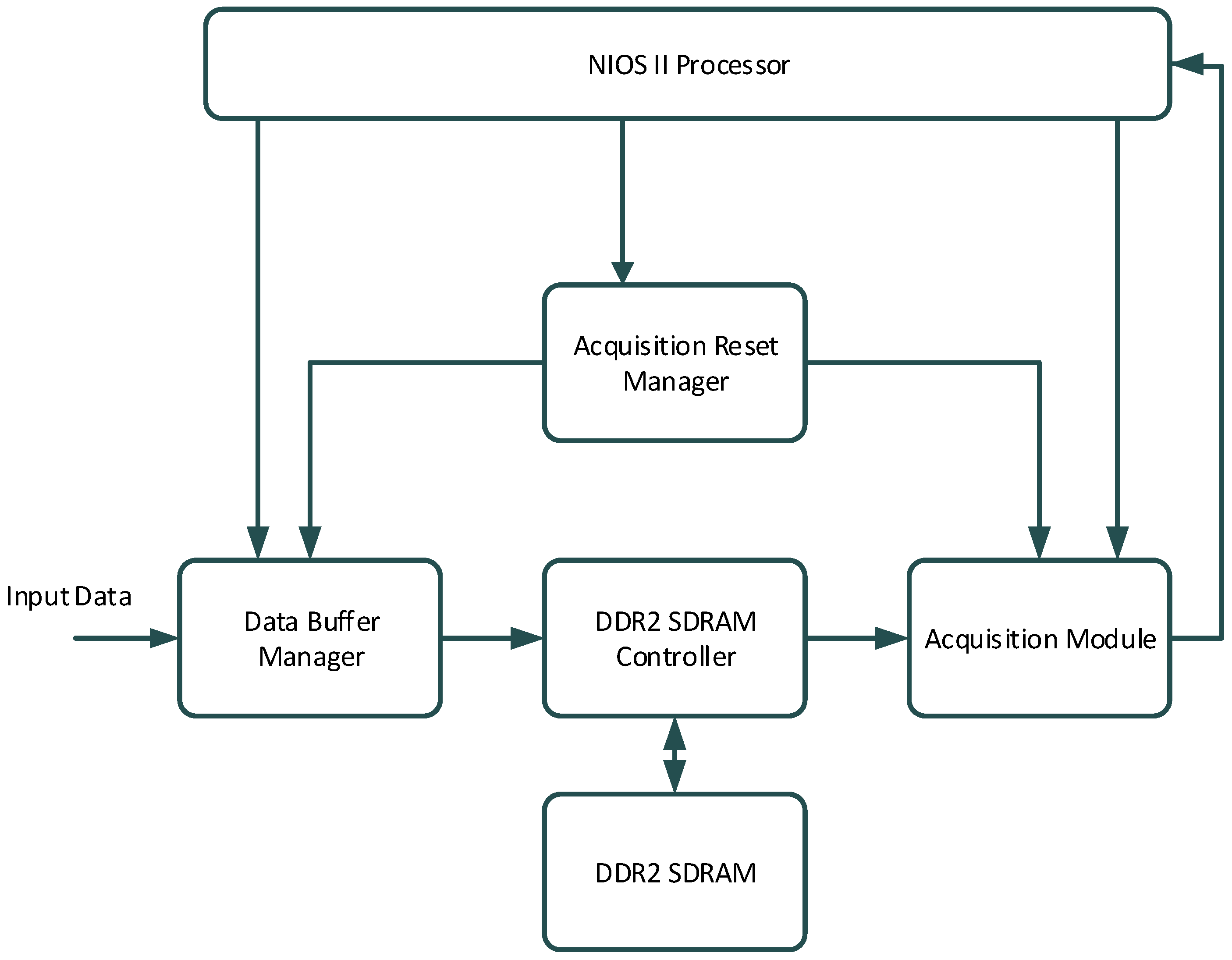
- A DE3 FPGA platform. An FPGA platform was required to allow custom designs of the acquisition and tracking engines within the receiver. The WeakHEO receiver uses the same development platform and builds on the FPGA-based architecture of the “Signature” receiver developed by ESPLAB in EPFL [19]. Its core component is a Stratix III FPGA (Field Programmable Gate Array) receiving the parallel sampled data from the RF front end. The FPGA contains a softcore NIOS II (32bit RISC) processor and performs all the high sensitivity acquisition, tracking and navigational data decoding processes. Raw measurements (pseudoranges, pseudorange rates, signal parameters, time, etc.) are passed to the PC through a UART interface at a rate of 0.1 Hz. Note that this rate has been chosen in order to allow the real-time processing of the navigation solution on the PC (currently programmed in Matlab). In the next version of the receiver, a faster update rate will be selected. An external memory (DDR2 SDRAM) connected to the FPGA is also used as buffer for the acquisition.
- A PC, The PC then performs the navigation solution in real time or can record and compute the orbital filter calculations offline.
2.1. Operations of the Receiver
- (1)
- The navigation software on the PC determines which GPS satellites are visible and estimates the Doppler for each satellite. This information is then sent to the FPGA through the UART interface. This allows a reduction of the frequency search space for the acquisition thus a reduction of the acquisition time.
- (2)
- The acquisition searches the satellites in view within a frequency search space around the coarse Doppler given. Once a satellite is acquired, there is a transition phase before the tracking to determine the position of the bit edge. Following this, tracking is started and the Time Of Week (TOW) is decoded from the received navigation data.
- (3)
- The measurements (pseudoranges, pseudorange rates, satellite PRN, estimated C/No and TOW) are sent to the computer by the FPGA at a rate of 0.1 Hz and a PVT solution is computed.
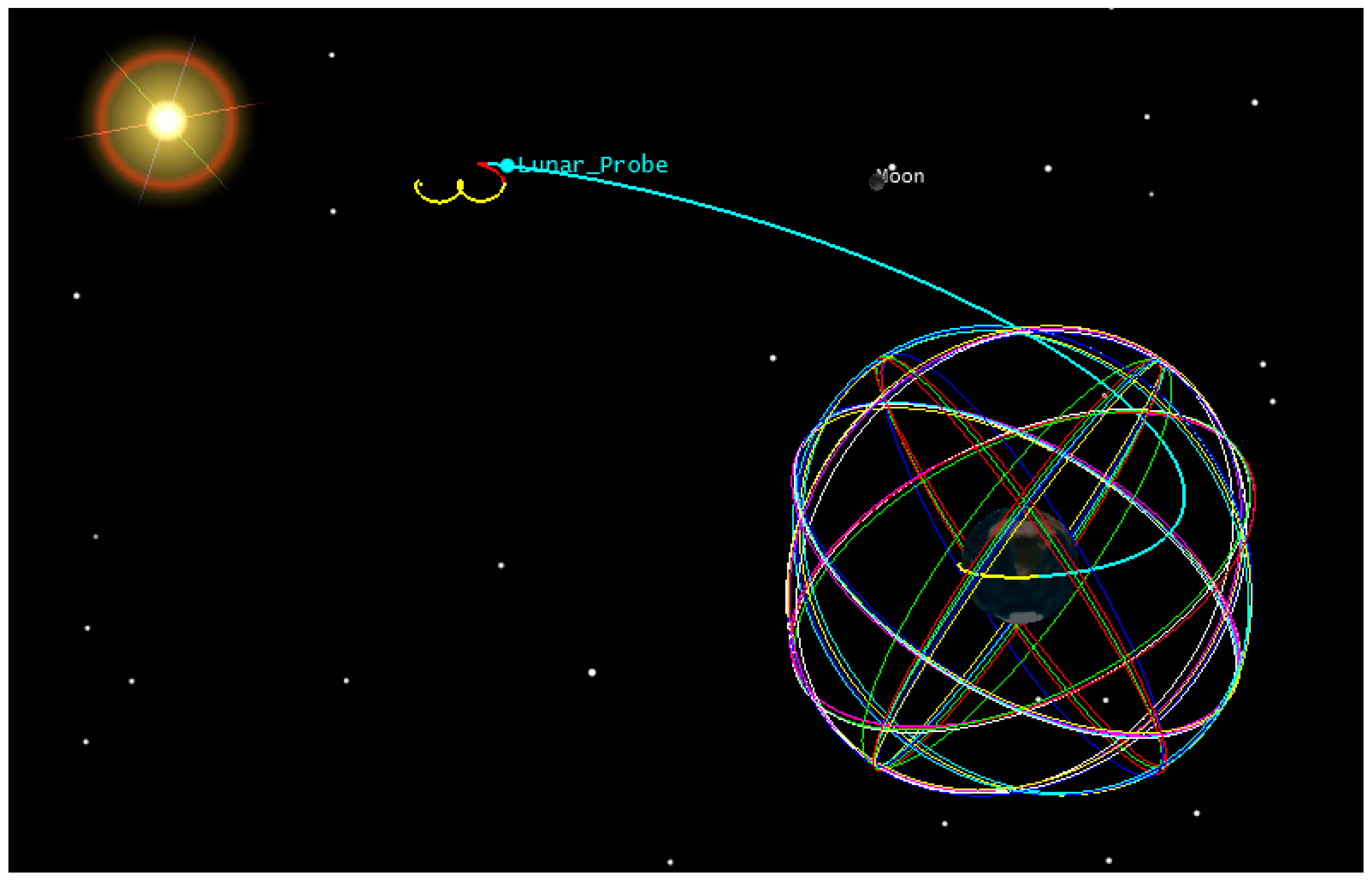
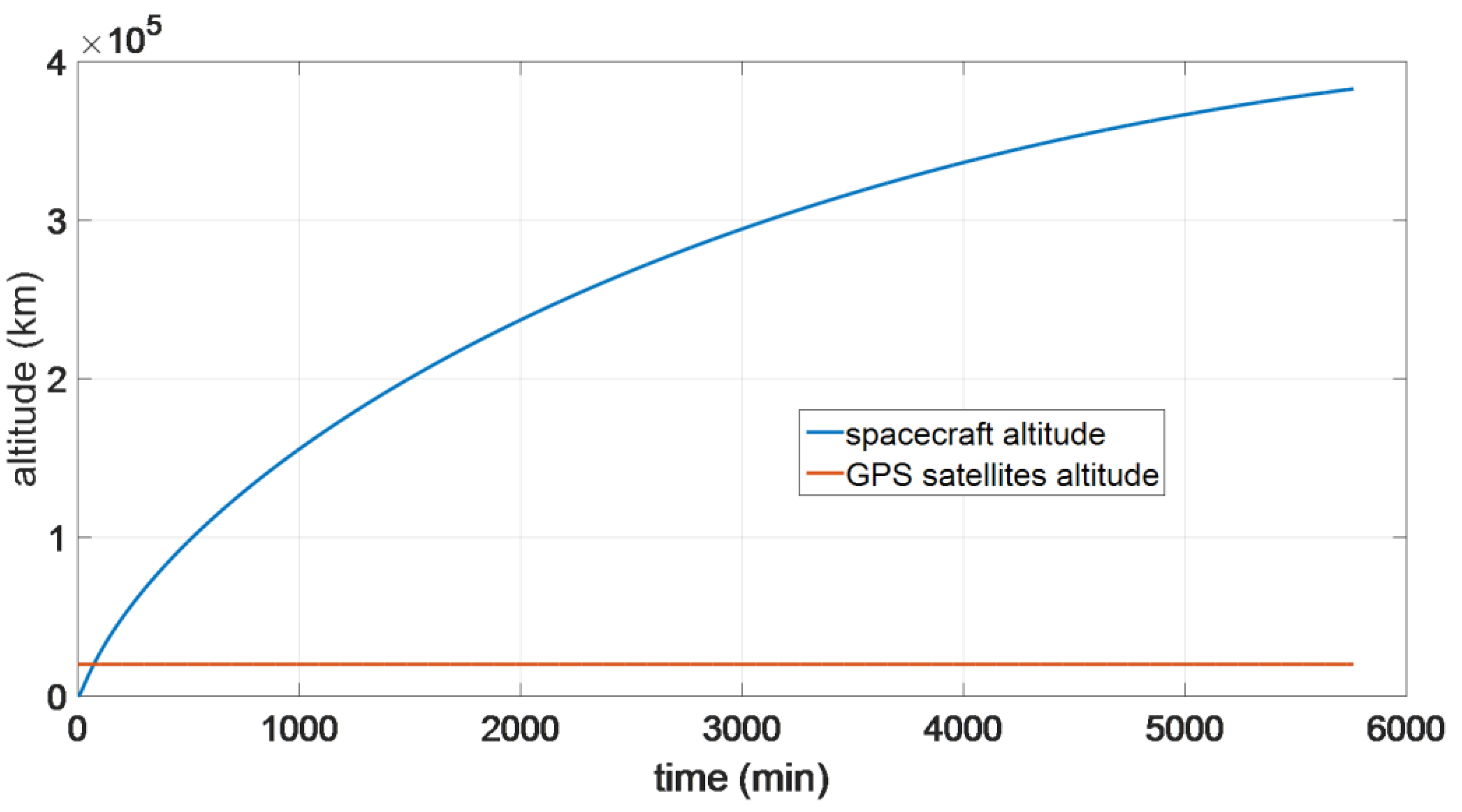
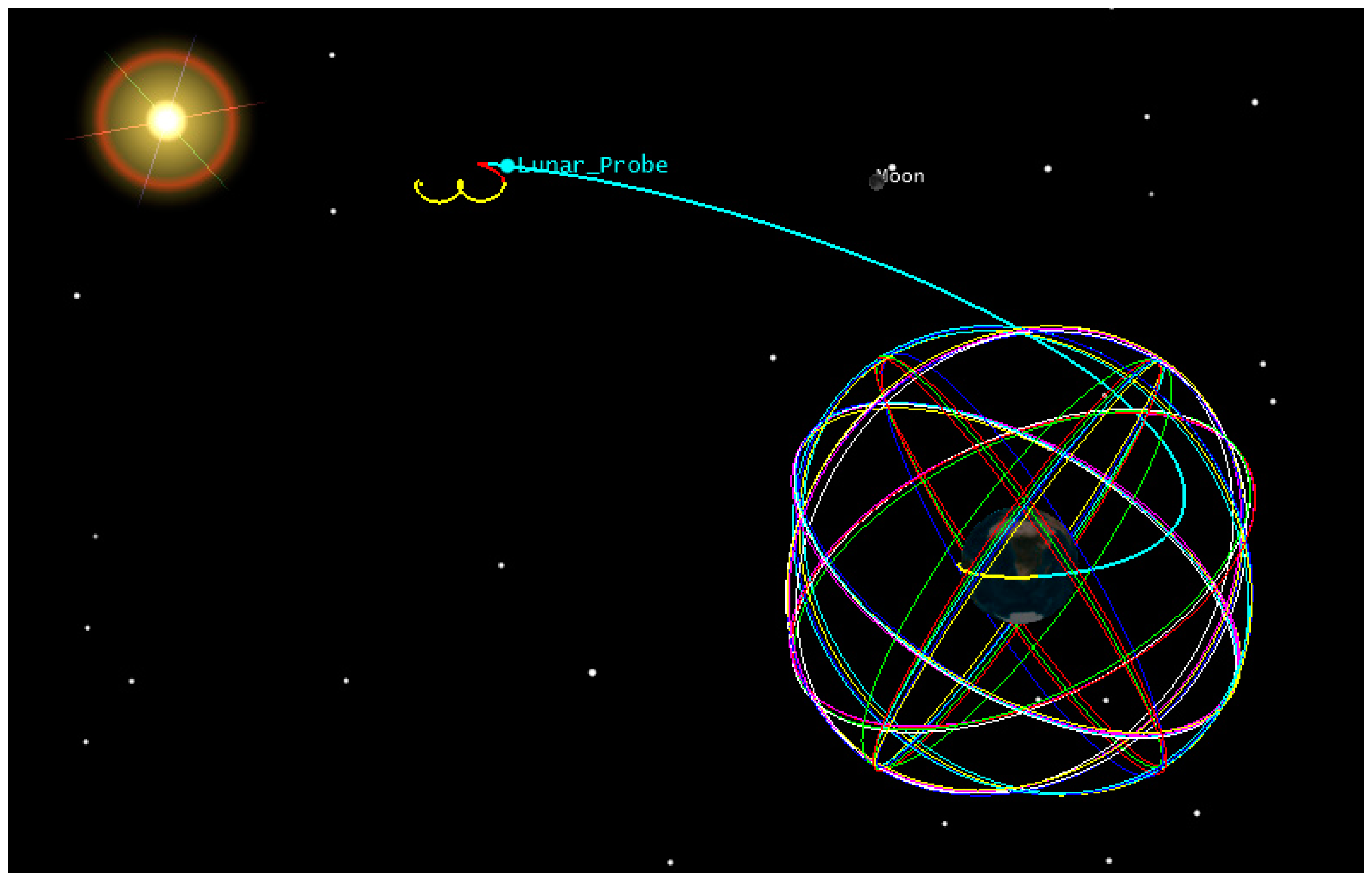
2.2. Description of the Mission Scenario
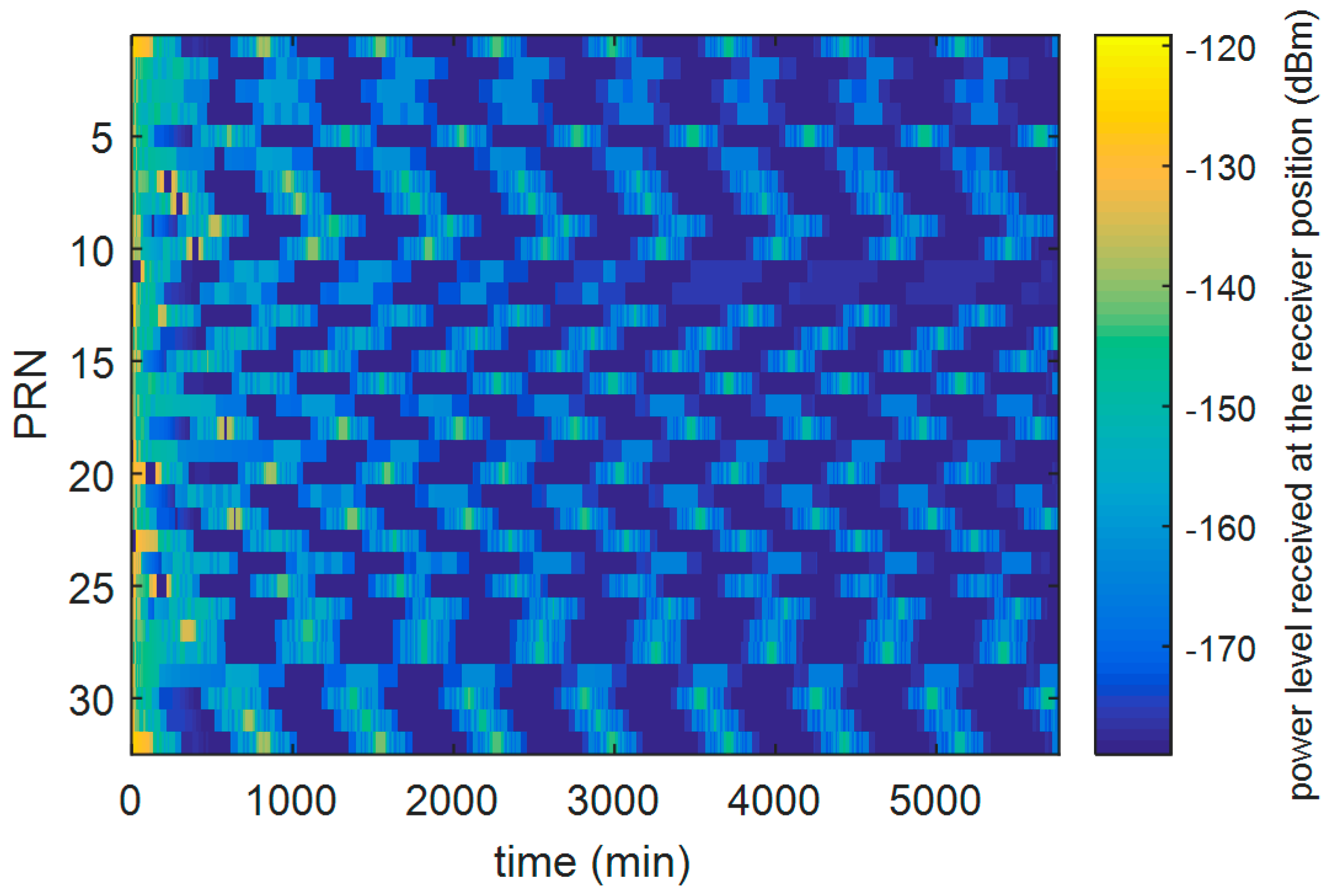
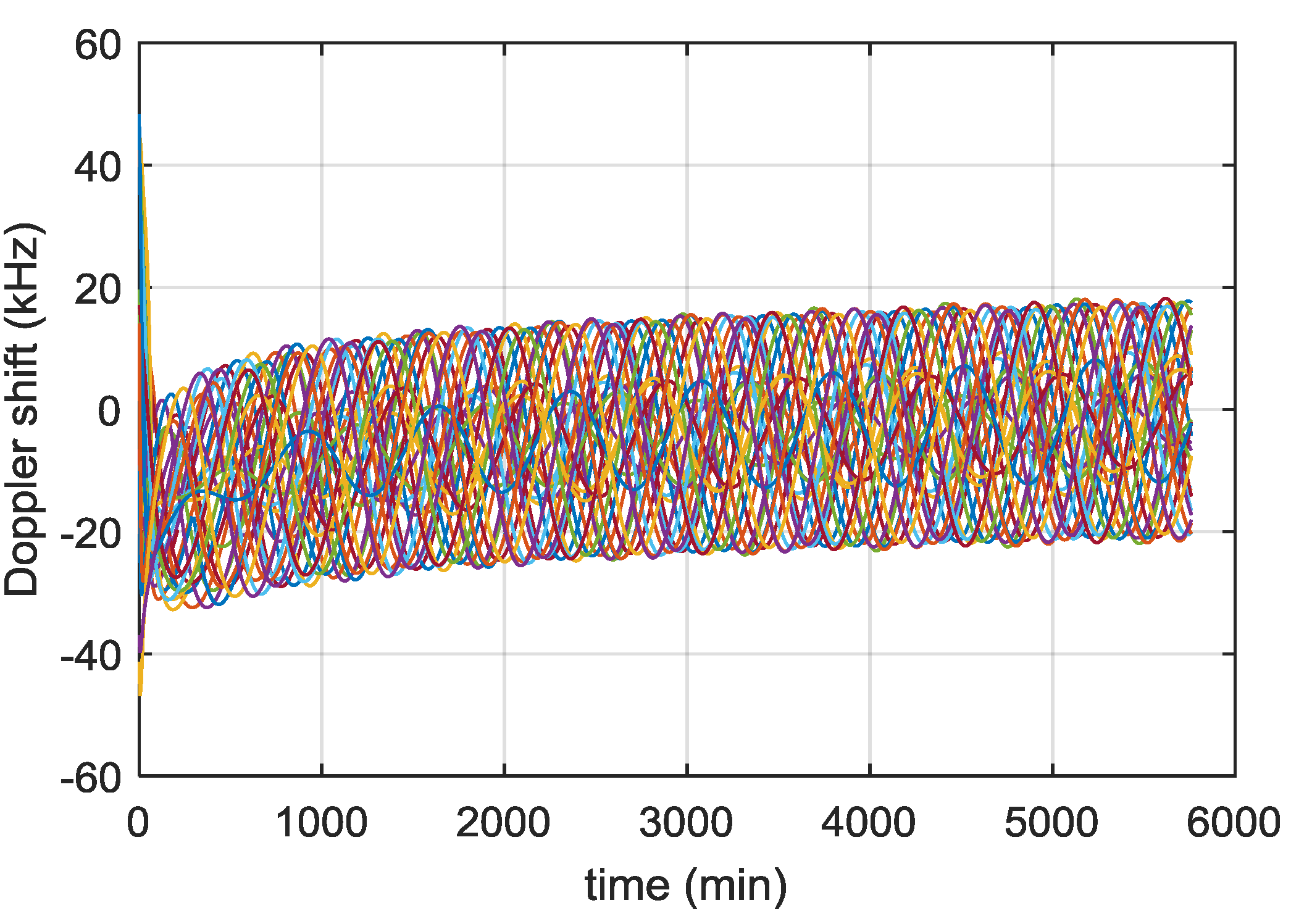
2.3. GNSS Signal Characteristics
2.3.1. Simulation Models and Assumptions
| is the guaranteed minimum signal level for the GPS L1 C/A signals on the Earth according to [21]. | |
| is the global offset, chosen to obtain in simulation the performance obtained when real signals are received. Typically, the transmitted signal power levels are from 1 to 5 dB higher than the minimum received ones [23], for this reason an intermediate value of 3 dB has been chosen. | |
| is the reference range used for inverse-square variation calculation and equal to the range from a receiver to the GNSS satellite at zero elevation. | |
| is the range from GNSS satellite to the receiver. | |
| is the loss from the GNSS satellite transmit antenna in the direction of the receiver. 3D GPS antenna patterns have been modelled, as described in our previous study [24,25]. | |
| is the loss from the receiver antenna in the direction of the GNSS satellite. |
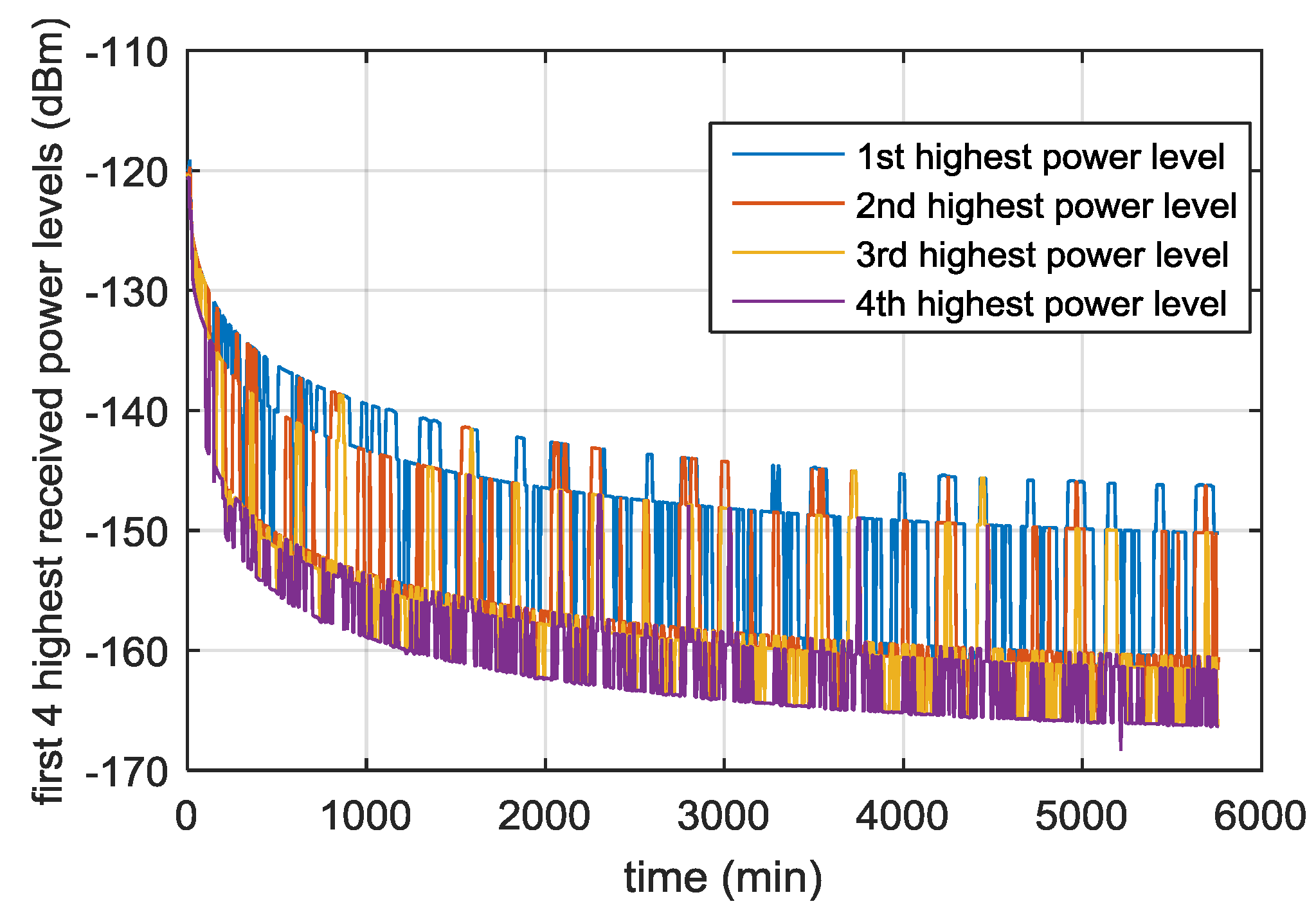
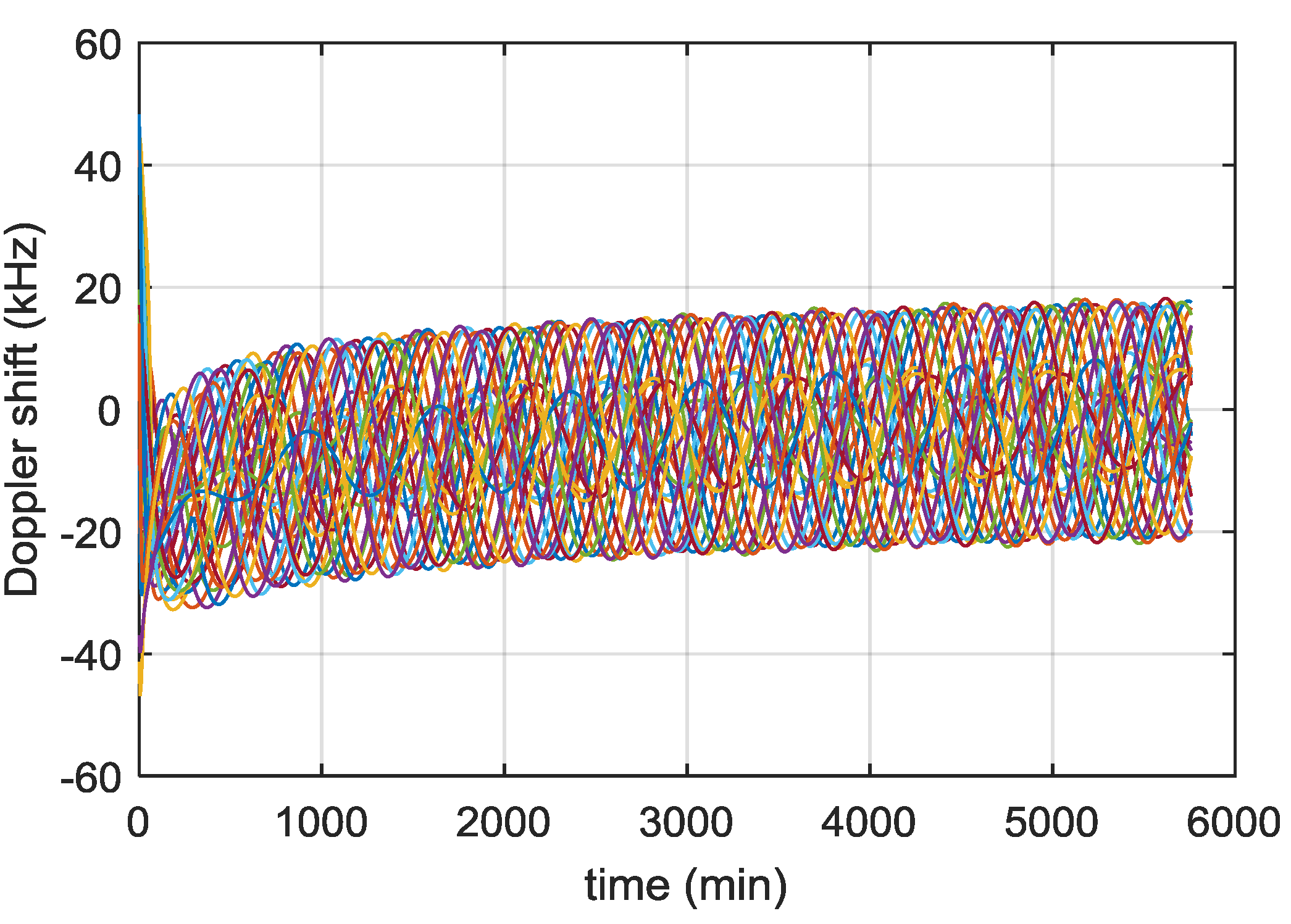
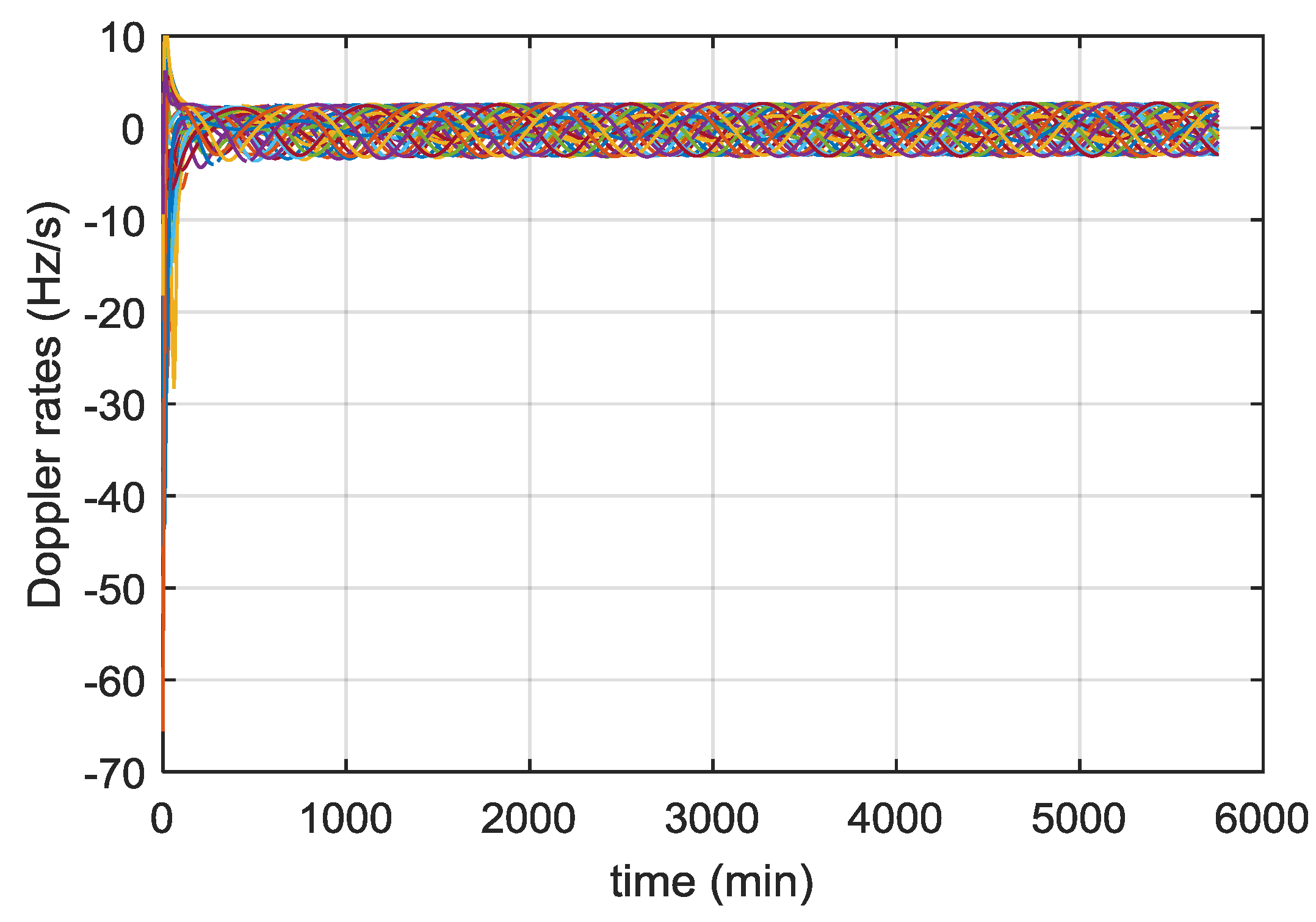
2.3.2. Signal Power and Dynamics
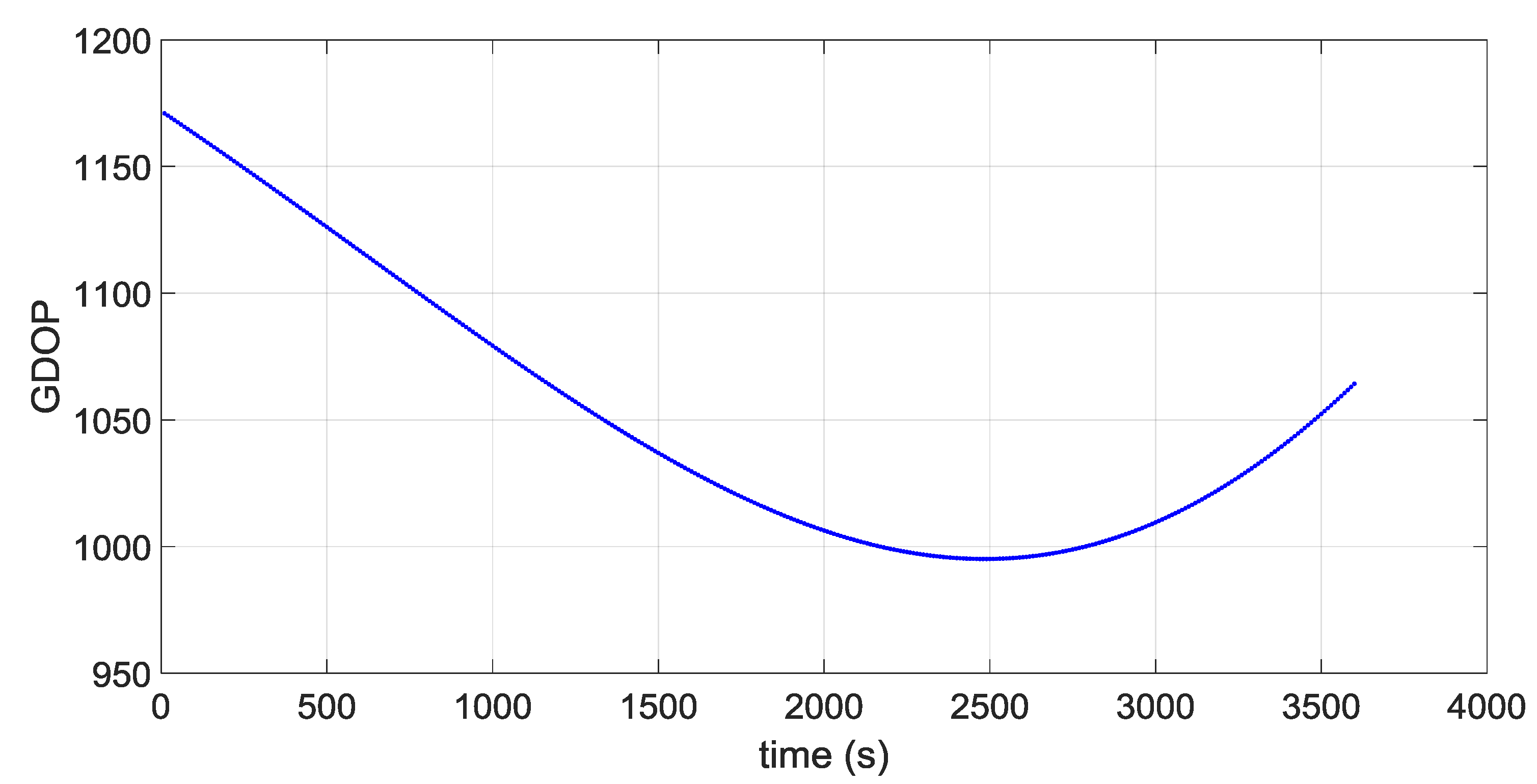
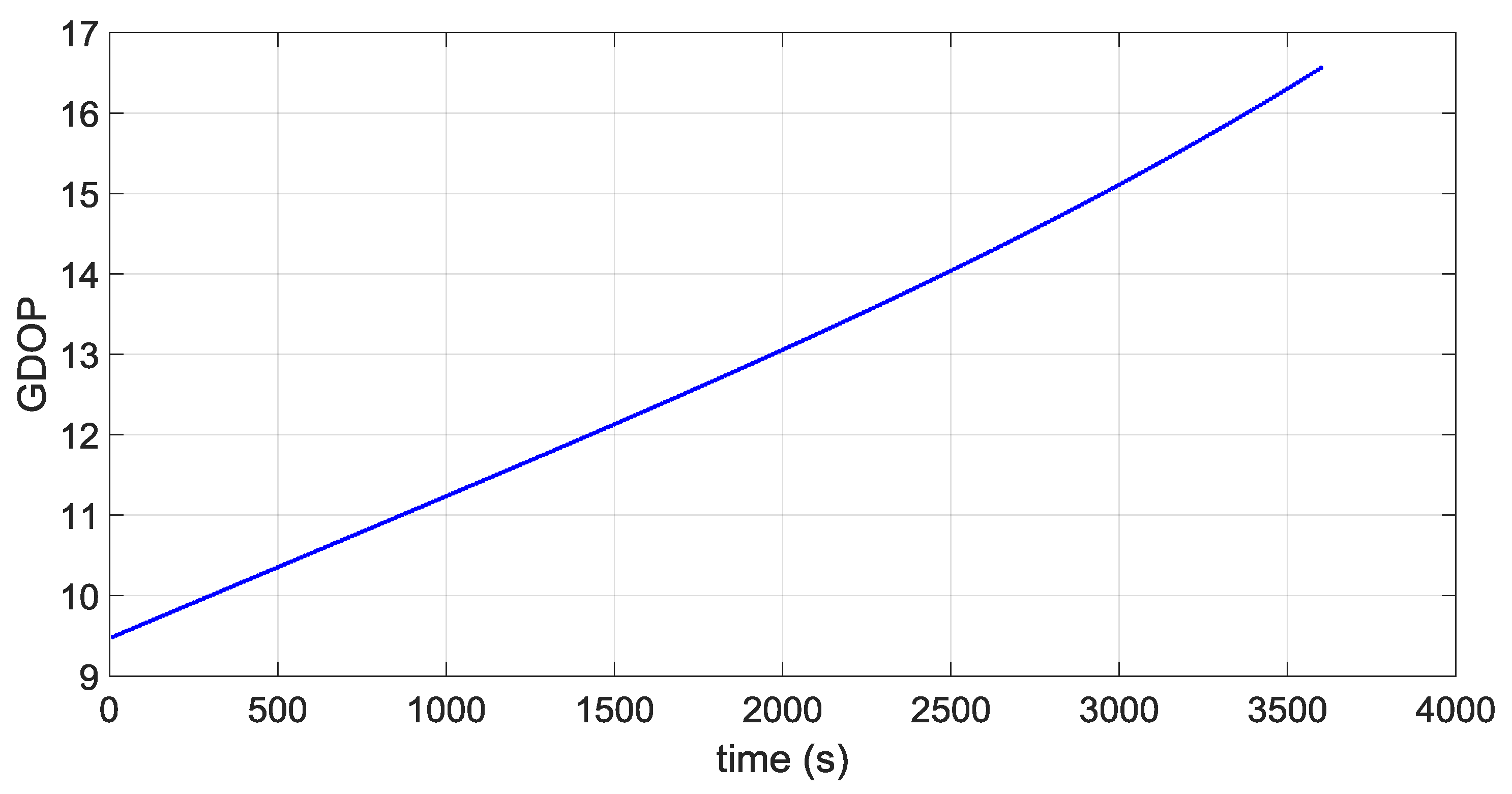
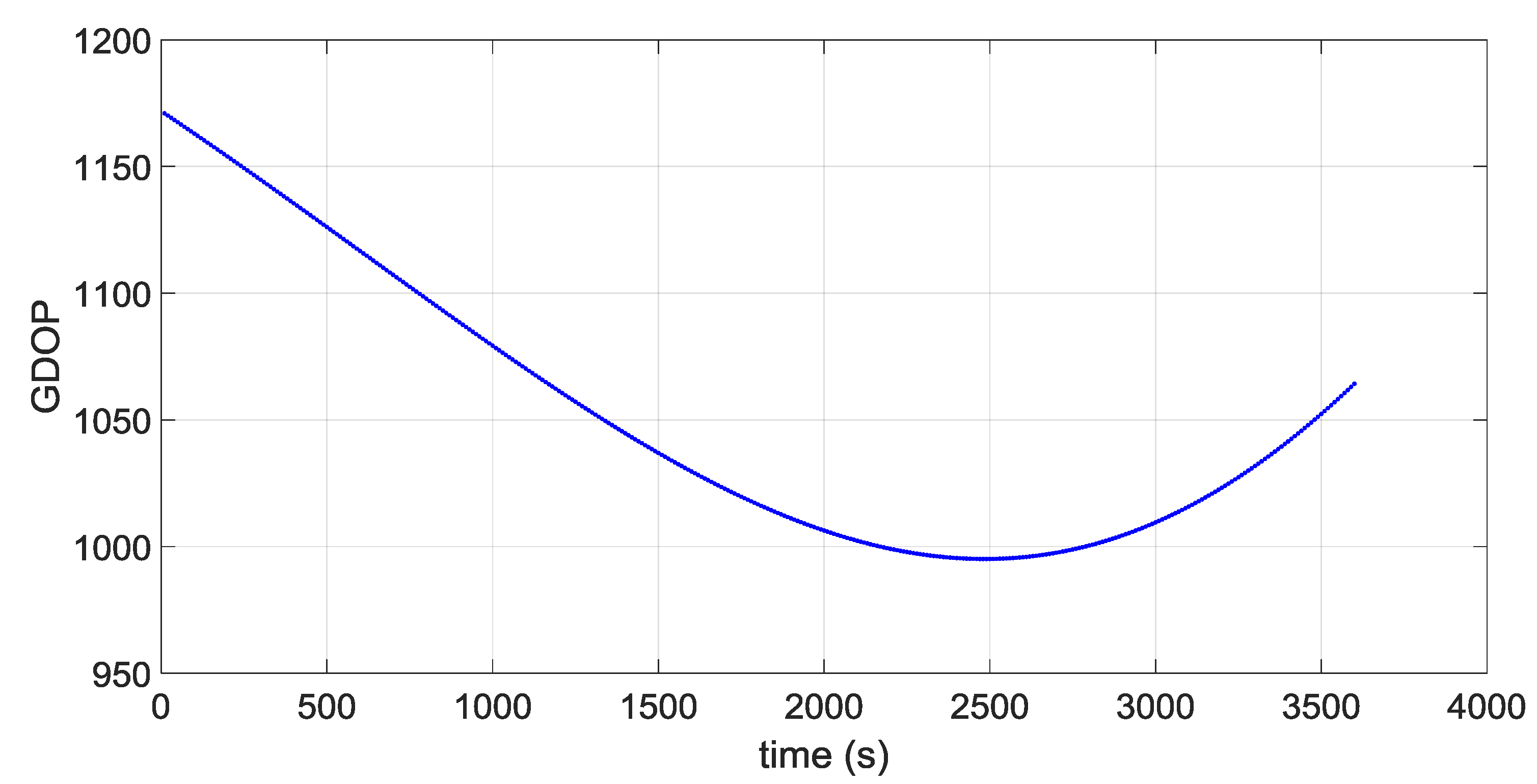
2.4. Geometric Dilution of Precision (GDOP) and Ranging Errors
2.5. GPS Acquisition
2.5.1. Acquisition Strategy
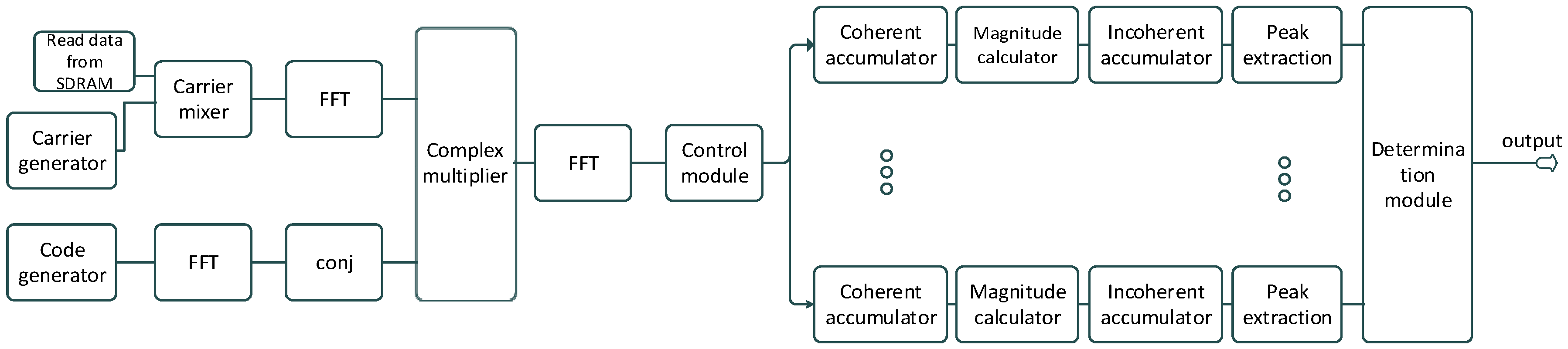
2.5.2. Acquisition Hardware Implementation
2.5.3. Acquisition Aiding from Navigation
- -
- Position (from the last known position stored in memory),
- -
- Time (from the real-time clock),
- -
- Reference frequency (since the receiver oscillator offset is determined by the navigation solution)
- -
- Approximate GNSS satellite positions and velocities (calculated from the almanac data stored in memory).
Time Uncertainty
Receiver Velocity Uncertainty
Receiver Position Uncertainty
Almanac Uncertainty
Total Search Uncertainty
2.6. GPS Tracking
2.6.1. Bit Synchronisation and Navigation Data Decoding from very Weak Signals
- (1)
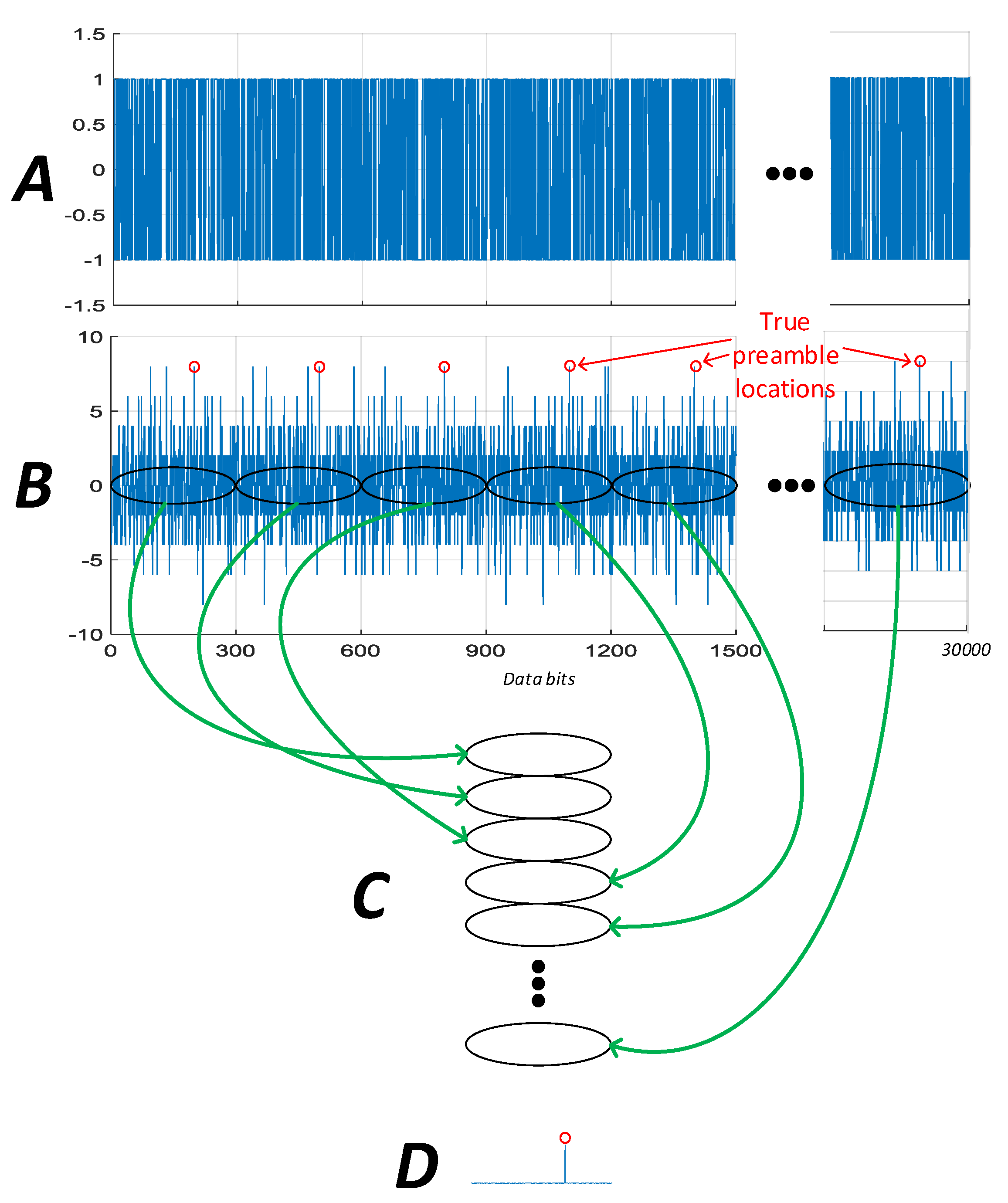
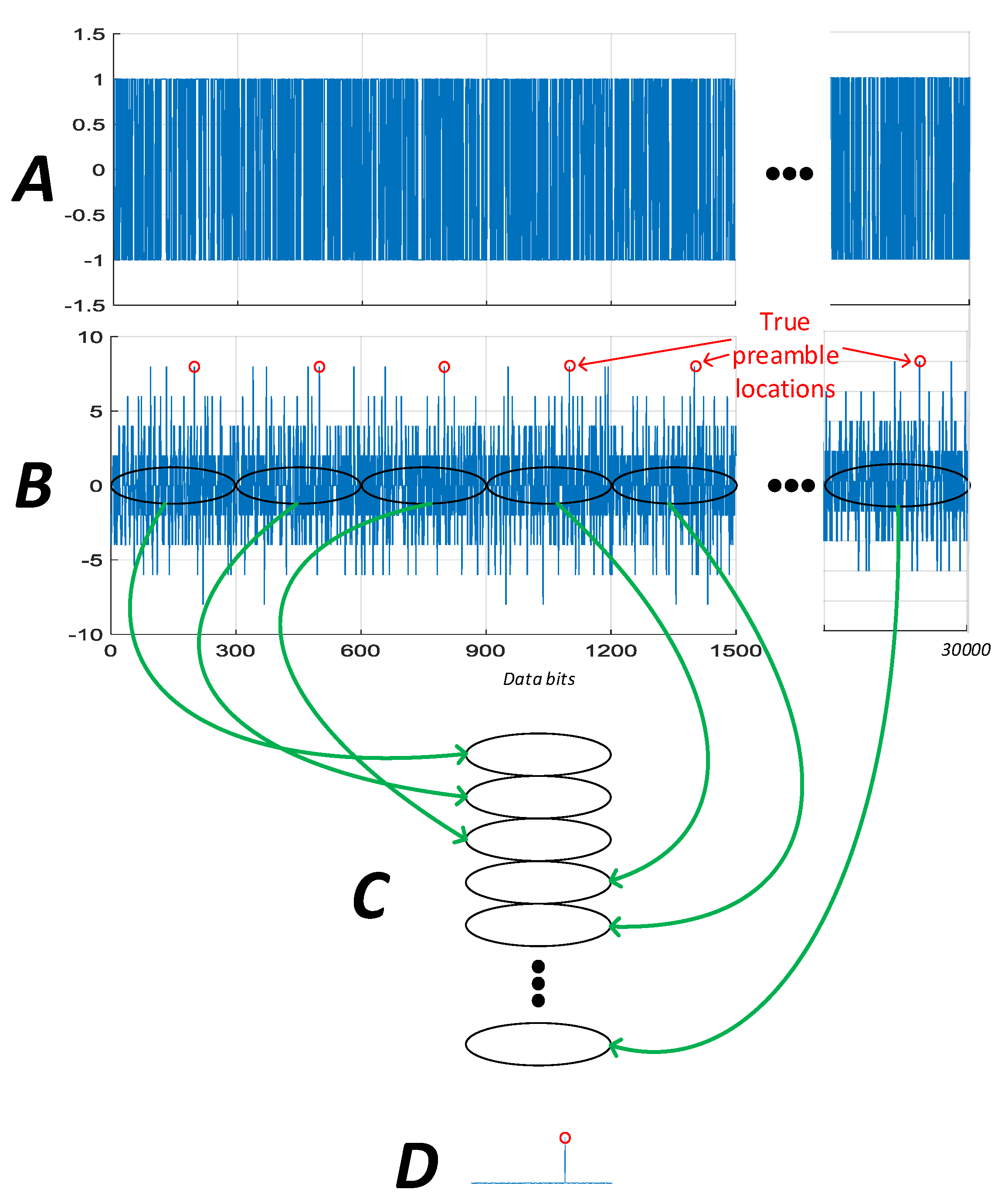
- Store 20 frames (i.e., 20 × 30 s, or 100 sub-frames, i.e., 30,000 bits) of original demodulated data in a vector A.
- (2)
- Search for all the preamble-like sequences. Find all the likely preambles of vector A, and store these correlation values in vector B. Due to the possible 180° phase ambiguity induced by phase tracking and the chance of cycle slips with weak signals, positive and negative correlations are searched for.
- (3)
- Matrix C is generated by reshaping the correlation vector B into sub-frame length rows. Each column then represents a possible preamble location in the sub-frame. The size of this matrix is 300 × 100. The absolutes values of matrix C are then accumulated down the columns to form a vector D.
- (4)
- The three largest correlations of vector D are recorded. The largest value should be the correct position of the preamble, however, with weak signals other possible locations may need to be checked.
- (5)
- The first position is assumed correct, the vector A reshaped into a matrix of sub-frame length rows and the sub-frame number from each successive sub-frame is checked after column wise accumulation. If the sub-frame number is incrementing correctly, this position is declared correct and used in subsequent processing. Otherwise, the other probable positions of the preamble are checked.
2.6.2. Weak Signal Tracking
2.7. GPS Navigation
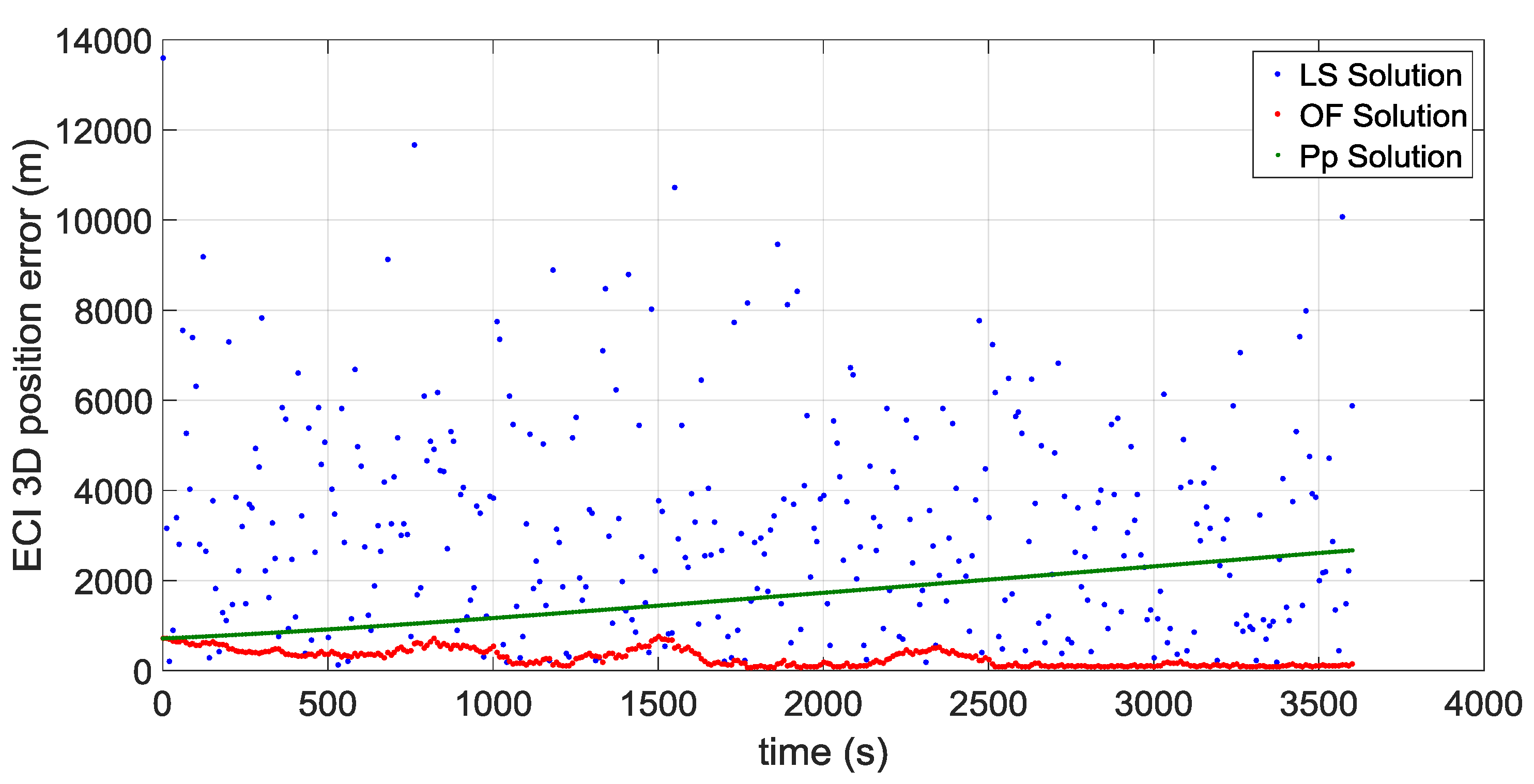
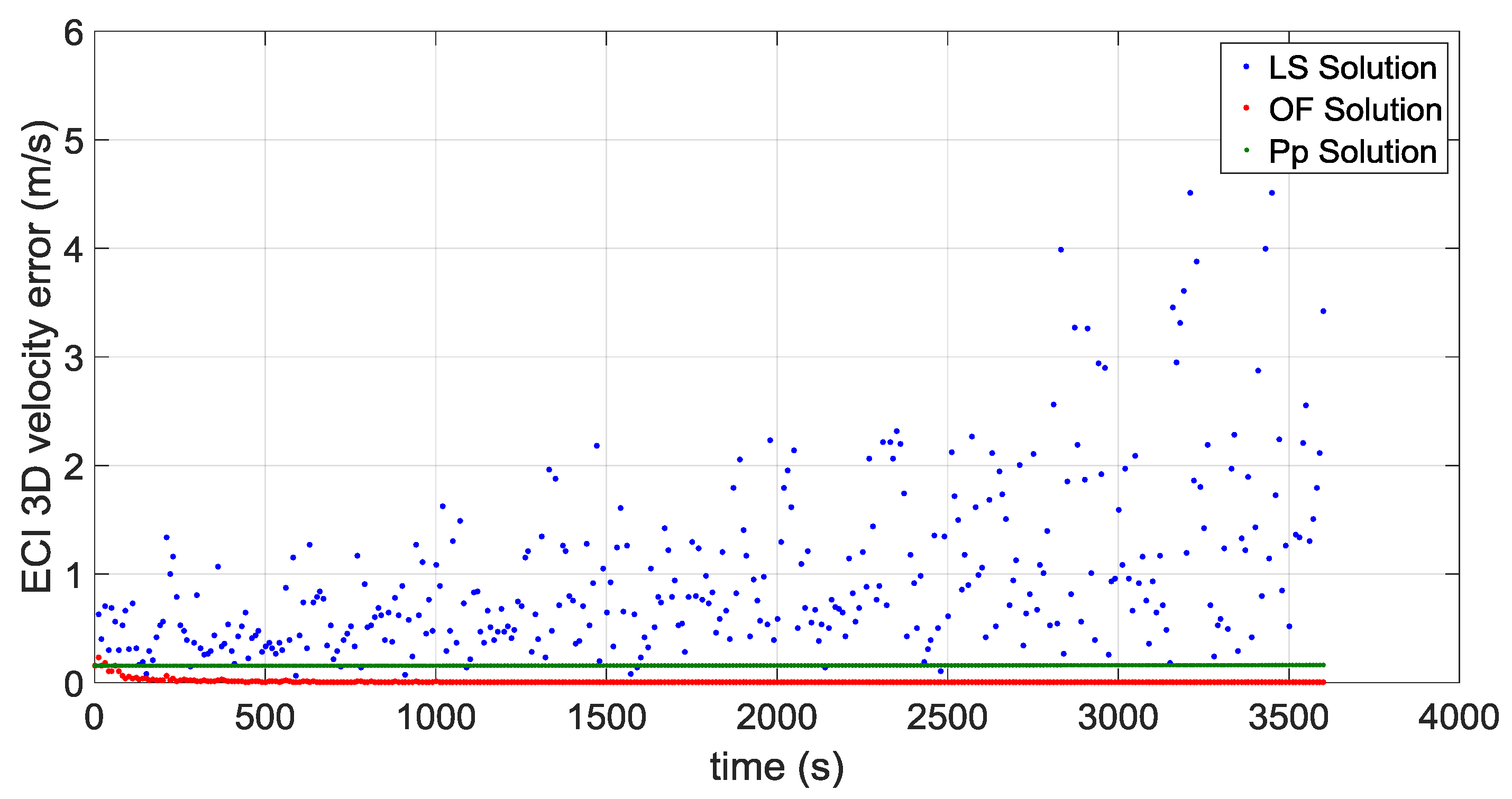
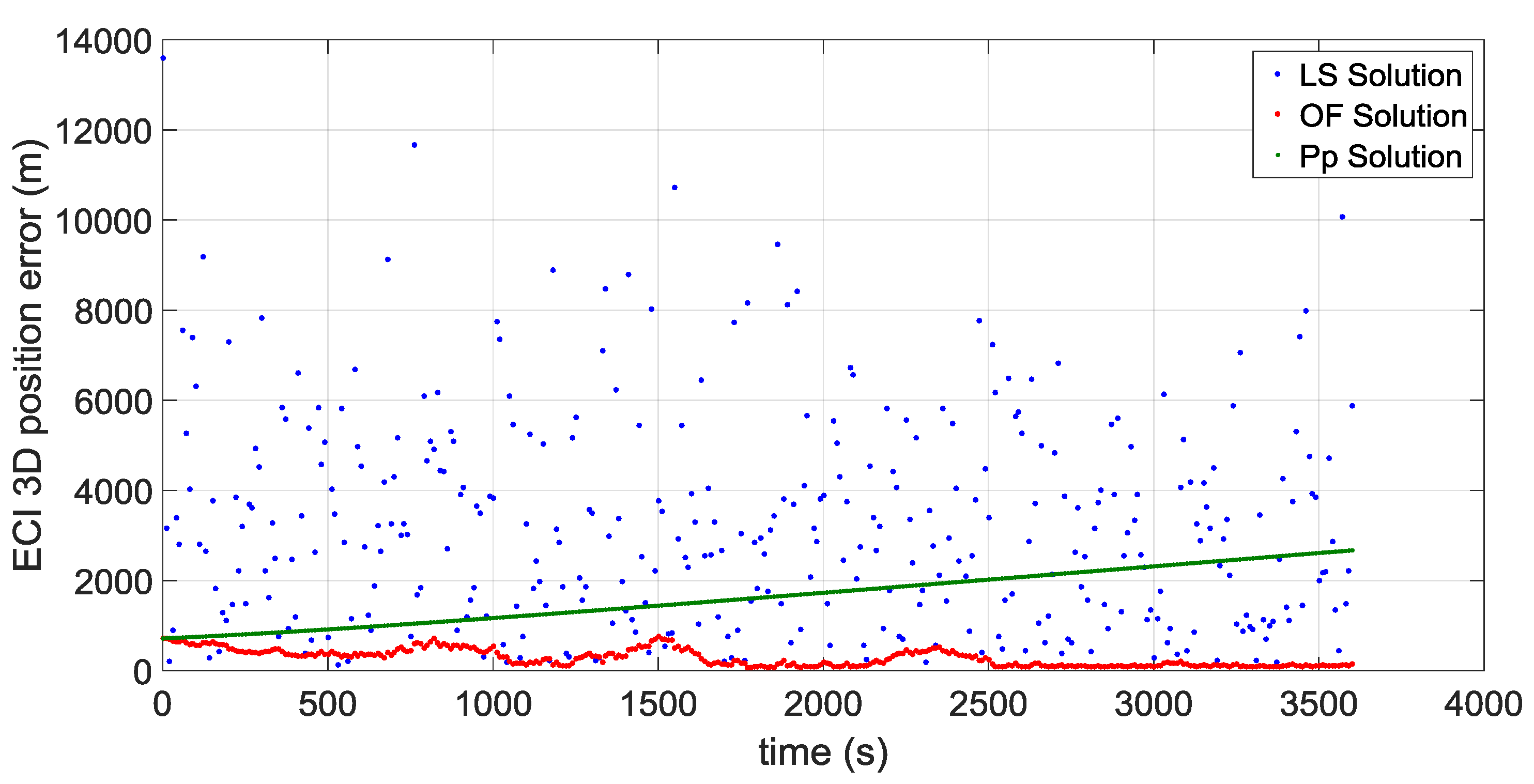
3. WeakHEO Navigation Performance
4. Conclusions
5. Future Work
Author Contributions
Conflicts of Interest
References
- Miller, J. Enabling a fully interoperable GNSS space service volume. In Proceedings of the 6th International Committee on GNSS (ICG), Tokyo, Japan, 5–9 September 2011.
- Marmet, F.; Bondu, E.; Calaprice, M.; Maureau, J.; Laurichesse, D.; Grelier, T.; Ries, L. GPS/Galileo navigation beyond low earth orbit. In Proceedings of the 6th European Workshop on GNSS Signals and Signal Processing, Neubiberg, Germany, 5–6 December 2013.
- Capuano, V.; Botteron, C.; Wang, Y.; Tian, J.; Leclère, J.; Farine, P.A. GNSS to Reach the Moon. In Proceedings of the 65th International Astronautical Congress, Toronto, ON, Canada, 29 September–3 October 2014.
- Braasch, M.S.; de Haag, M.U. GNSS for LEO, GEO, HEO and beyond. In Proceedings of the Advances in the Astronautical Sciences, Rocky Mountain Guidance and Control Conference, Breckenridge, CO, USA, 31 January–4 February 2009.
- Silva, P.F.; Lopes, H.D.; Peres, T.R.; Silva, J.S.; Ospina, J.; Cichocki, F.; Dovis, F.; Musumeci, L.; Serant, D.; Calmettes, T.; et al. Weak GNSS signal navigation to the moon. In Proceedings of the ION GNSS+, Nashville, TN, USA, 16–20 September 2013.
- Palmerini, G.B.; Sabatini, M.; Perrotta, G. En route to the moon using GNSS signals. Acta Astronaut. 2009, 64, 467–483. [Google Scholar] [CrossRef]
- Palmerini, G. GNSS software receiver as a navigation sensor in very high orbits. In Proceedings of the IEEE International Workshop on Metrology for Aerospace, Benevento, Italy, 29–30 May 2014.
- Manzano-Jurado, M.; Alegre-Rubio, J.; Pellacani, A.; Seco-Granados, G.; Lopez-Salcedo, J.; Guerrero, E.; Garcia-Rodriguez, A. Use of weak GNSS signals in a mission to the moon. In Proceedings of the 7th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 3–5 December 2014.
- Bamford, W.A.; Heckel, G.W.; Holt, G.N.; Moreau, M. A GPS receiver fot lunar missions. In Proceedings of the ION NTM 2008, San Diego, CA, USA, 28–30 January 2008.
- Bamford, W.; Naasz, B.; Moreaus, M. Navigation performance in high earth orbits using navigator GPS receiver. In Proceedings of the American Astronautical Society Guidance and Control Conference, Breckenridge, CO, USA, 4–8 February 2006.
- Winternitz, L.; Moreau, M.; Boegner, G.; Sirotzky, S. Navigator GPS receiver for fast acquisition and weak signal space applications. In Proceedings of the ION GNSS Conference, Long Beach, CA, USA, 21–24 September 2004.
- Moreau, M.C.; Axelrad, P.; Garrison, J.L.; Wennersten, M.; Long, A. Test results of the PiVot receiver in high earth orbits using a GSS GPS simulator. In Proceedings of the ION, Salt Lake City, UT, USA, 11–14 September 2001.
- Capuano, V.; Botteron, C.; Farine, P.-A. GNSS performances for MEO, GEO and HEO. In Proceedings of the 64th International Astronautical Congress, Beijing, China, 23–27 September 2013.
- Unwin, M.; van Steenwijk, R.D.V.; Blunt, P.; Hashida, Y.; Kowaltschek, S.; Nowak, L. Navigating above the GPS constellation—Preliminary results from the SGR-GEO on GIOVE-A. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013.
- Balbach, O.; Eissfeller, B.; Hein, G.; Enderle, W.; Schmidhuber, M.; Lemke, N. Tracking GPS above GPS satellite altitude: First results of the GPS experiment on the HEO mission Equator-S. In Proceedings of the IEEE Position Location and Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1998.
- Moreau, M.; Davis, E.P.; Carpenter, J.R.; Kelbel, G.D.P.A.D. Results from the GPS flight experiment on the high earth orbit AMSAT OSCAR-40 spacecraft. In Proceedings of the ION GPS Conference, Tampa, FL, USA, 24–27 September 2002.
- Davis, G.; Moreau, M.; Carpenter, R.; Bauer, F. GPS-based navigation and orbit determination for the AMSAT AO-40 satellite. In Proceedings of the AIAA, Monterey, CA, USA, 5–8 August 2003.
- Ruegamer, A.; Foerster, F.; Stahl, M.; Rohmer, G. A flexible and portable multiband GNSS front-end system. In Proceedings of the ION ITM, Nashville, TN, USA, 17–21 September 2012.
- Sheridan, K.; Wells, D.; Botteron, C.; Leclère, J.; Dominici, F.; Defina, A. An assisted-GNSS solution for demanding road applications using the EGNOS Data Access System (EDAS). In Proceeedings of the Toulouse Space Show, Toulouse, Franch, 8–11 June 2010.
- AGI. Available online: http://www.agi.com/products/stk/ (accessed on 10 November 2015).
- ICD-GPS-200F Navstar GPS Space Segment/User Segment Interfaces. 21 September 2011.
- Spirent. SimGen Software User Manual. July 21 2015. [Google Scholar]
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Capuano, V.; Botteron, C.; Leclere, J.; Tian, J.; Yanguang, W.; Farine, P.A. Feasibility study of GNSS as navigation system to reach the Moon. Acta Astronaut. 2015, 116, 186–201. [Google Scholar] [CrossRef]
- Capuano, V.; Basile, F.; Botteron, C.; Farine, P.-A. Gnss Based Orbital Filter for Earth Moon Transfer Orbits. J. Navig. 2015. [Google Scholar] [CrossRef]
- Capuano, V.; Blunt, P.; Botteron, C.; Farine, P.-A. Orbital filter aiding of a high sensitivity GPS receiver for lunar missions. In Proceedings of the International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 25–28 January 2016.
- Van Diggelen, F. A-GPS: Assisted GPS, GNSS and SBAS; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Leclère, J.; Botteron, C.; Farine, P.-A. Comparison framework of FPGA-based GNSS signals acquisition architectures. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1497–1518. [Google Scholar] [CrossRef]
- Ziedan, N.I. GNSS Receivers for Weak Signals; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Duffett-Smith, P.J.A.R.P. Reconstruction of the satellite ephemeris from time-spaced snippets. In Proceedings of the ION GNSS 2007, Fort Worth, TX, USA, 25–28 September 2007.
- Musumeci, L.; Dovis, F.; Silva, P.F.; Lopes, H.D.; Silva, J. Design of a very high sensitivity acquisition. In Proceedings of the Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014.
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Ziedan, N.I.; Garrison, J. Extended Kalman filter-based tracking of weak GPS signals under high dynamic conditions. In Proceedings of the ION GNSS 17th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 21–24 September 2004.
- Psiaki, M.L.; Jung, H. Extended Kalman filter methods for tracking weak gps signals. In Proceedings of the ION GNSS, Albuquerque, NM, USA, 24–26 June 2002.
- Jee, G.; Kim, H.; Lee, Y.; Park, C. A GPS C/A code tracking loop based on extended Kalman filter with multipath mitigation. In Proceedings of the ION GPS 2002, Portland, OR, USA, 24–27 September 2002.
- Salem, D.; O’Driscoll, C.; Lachapelle, G. Methodology for comparing two carrier phase tracking techniques. In GPS Solutions; Springer: Berlin, Germany, 2012; Volume 16, pp. 197–207. [Google Scholar]
- Petovello, M.; O’Driscoll, C.; Lachapelle, G. Carrier phase tracking of weak signals using different receiver architectures. In Proceedings of the ION NTM 2008, San Diego, CA, USA, 28–30 January 2008.
- Basile, F.; Capuano, V.; Botteron, C.; Farine, P.-A. GPS based orbital filter to reach the moon. Int. J. Space Sci. Eng. 2015, 3, 199–218. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| ECI Initial position (km) | |
| ECI Initial velocity (km/s) | |
| Departure date | 2 July 2005, 00:34:18 |
| Mass of the spacecraft (kg) | 1000 |
| Reference surface (m2) | 20 |
| Radiation pressure coefficient | 1 |
| Quantity | Value |
|---|---|
| C/N0 (dB-Hz) | 15 |
| Sampling rate (MHz) | 4.096 |
| Quantization (bit) | 4 |
| Quantization loss (dB) | 0.05 |
| Coherent integration time (ms) | 20 |
| Coherent gain (dB) | 46 |
| Frequency search step (Hz) | 25 |
| Worst case frequency mismatch loss (dB) | 0.91 |
| Code search step (chip) | 0.25 |
| Worst case code alignment loss (dB) | 1.16 |
| Data bit alignment loss (dB) | 0.92 |
| Squaring loss (dB) | 5.73 |
| Final desired SNR (dB) | 16 |
| Non-coherent gain required (dB) | 26.77 |
| Number of non-coherent integration | 475 |
| Total accumulation time (s) | 9.5 |
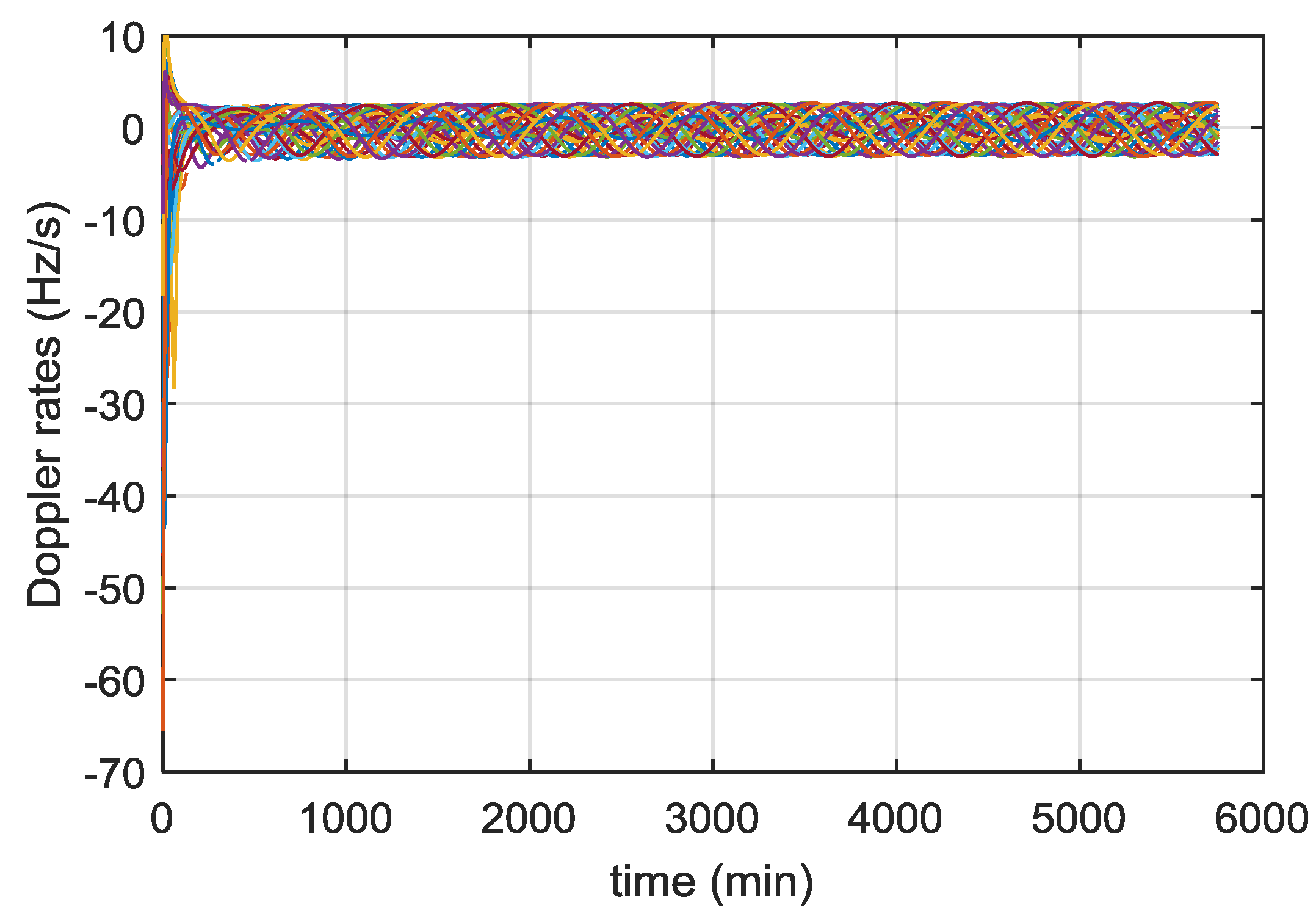
| Maximum tolerable Doppler rate error (Hz/s) | 2.63 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capuano, V.; Blunt, P.; Botteron, C.; Tian, J.; Leclère, J.; Wang, Y.; Basile, F.; Farine, P.-A. Standalone GPS L1 C/A Receiver for Lunar Missions. Sensors 2016, 16, 347. https://doi.org/10.3390/s16030347
Capuano V, Blunt P, Botteron C, Tian J, Leclère J, Wang Y, Basile F, Farine P-A. Standalone GPS L1 C/A Receiver for Lunar Missions. Sensors. 2016; 16(3):347. https://doi.org/10.3390/s16030347
Chicago/Turabian StyleCapuano, Vincenzo, Paul Blunt, Cyril Botteron, Jia Tian, Jérôme Leclère, Yanguang Wang, Francesco Basile, and Pierre-André Farine. 2016. "Standalone GPS L1 C/A Receiver for Lunar Missions" Sensors 16, no. 3: 347. https://doi.org/10.3390/s16030347
APA StyleCapuano, V., Blunt, P., Botteron, C., Tian, J., Leclère, J., Wang, Y., Basile, F., & Farine, P.-A. (2016). Standalone GPS L1 C/A Receiver for Lunar Missions. Sensors, 16(3), 347. https://doi.org/10.3390/s16030347