
A Novel Fisheye-Lens-Based Photoacoustic System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
3. Results and Discussion
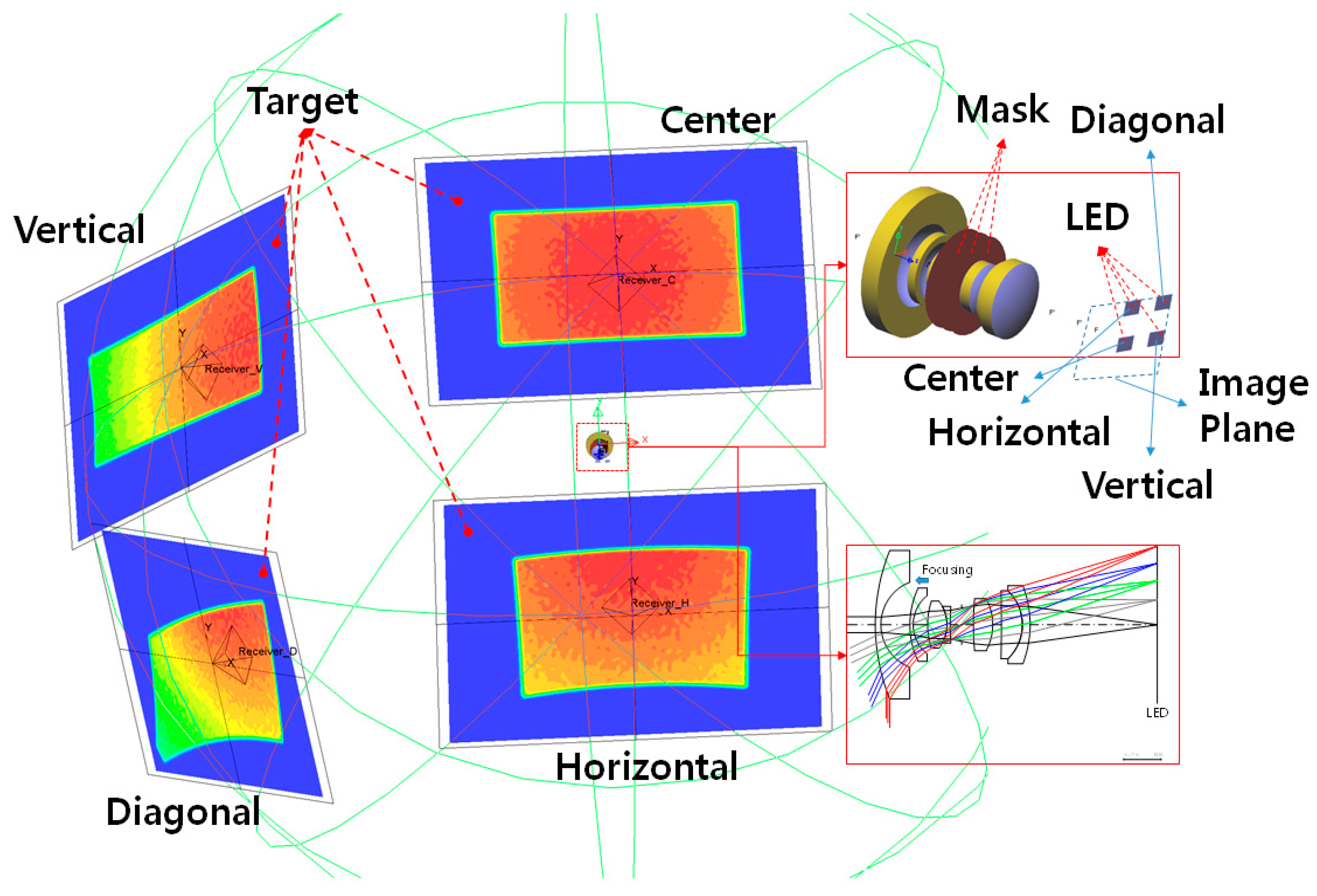
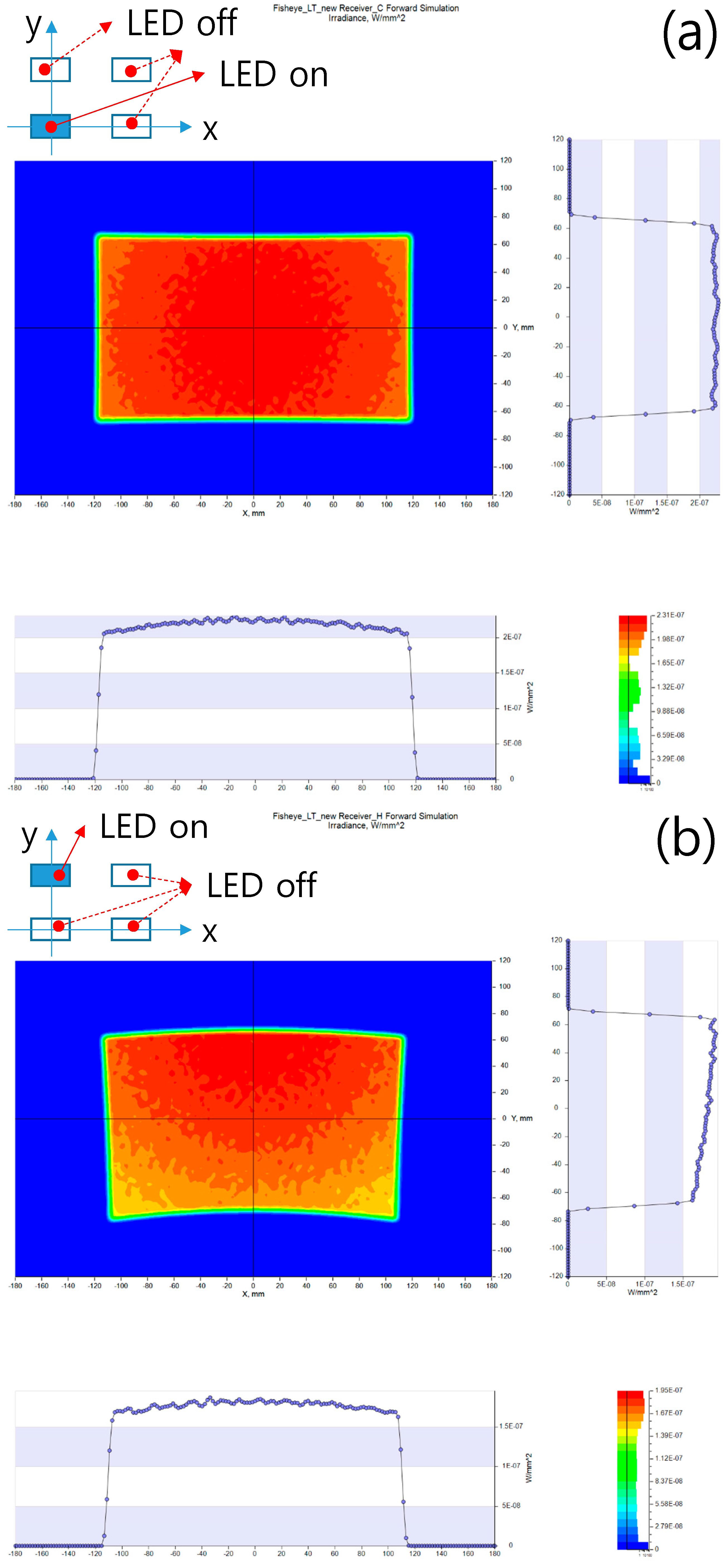
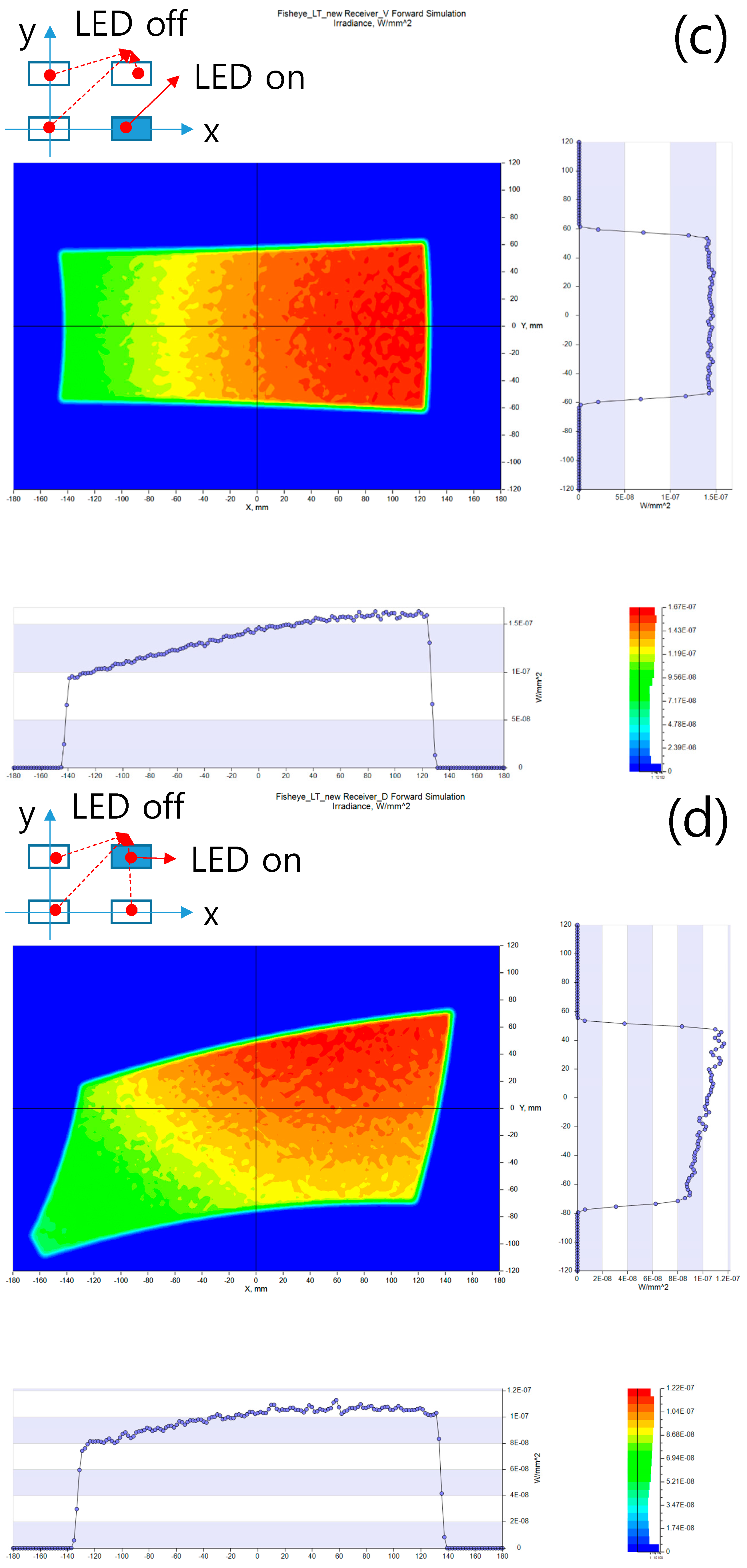
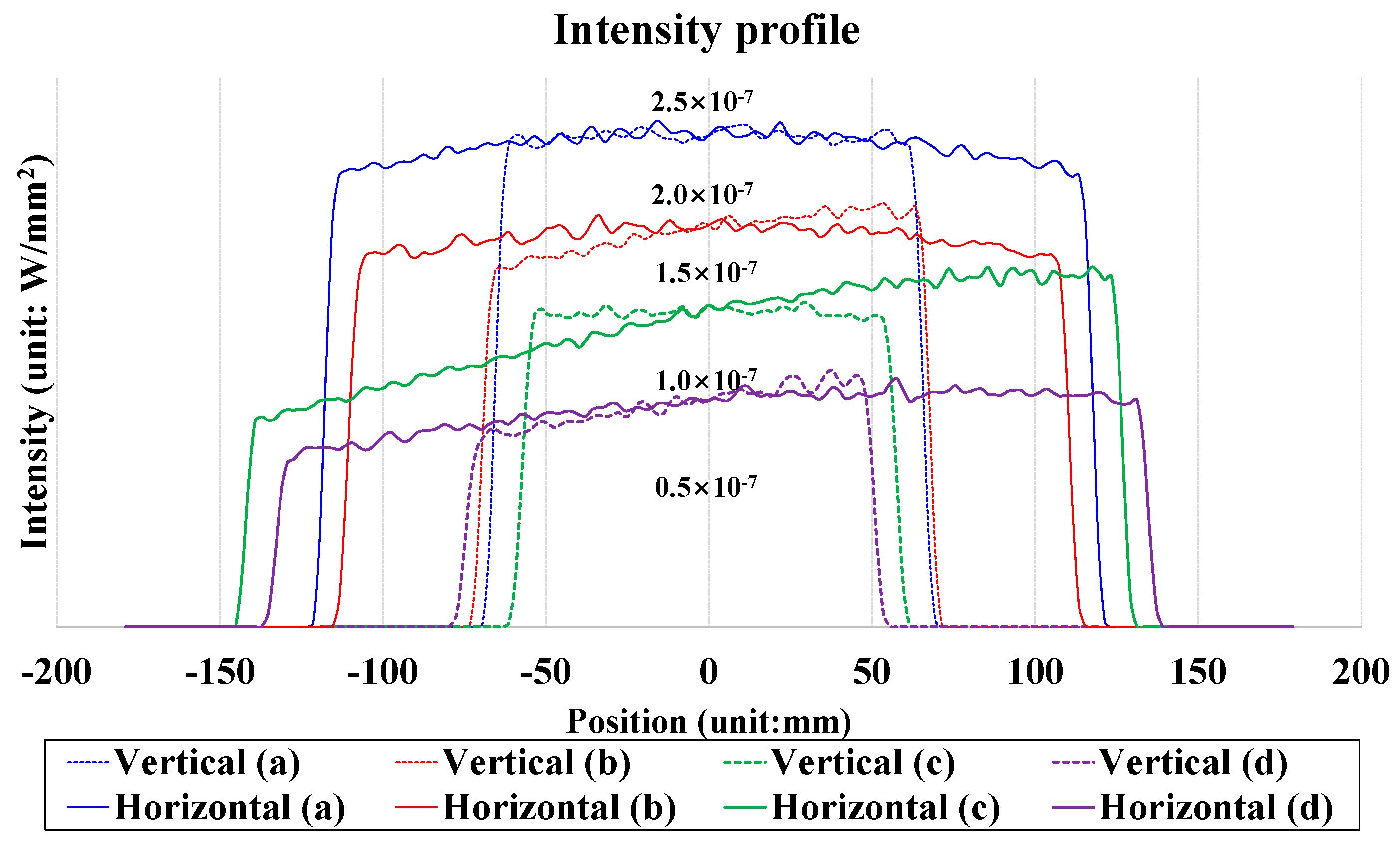
3.1. Fisheye Lens Performance Verification
3.2. Pulse-Echo Responses
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hwang, J.Y.; Kang, B.J.; Lee, C.; Kim, H.H.; Park, J.; Zhou, Q.; Shung, K.K. Non-contact acoustic radiation force impulse microscopy via photoacoustic detection for probing breast cancer cell mechanics. Biomed. Opt. Express 2015, 6, 11–22. [Google Scholar] [CrossRef] [PubMed]
- Ye, S.; Yang, R.; Xiong, J.; Shung, K.K.; Zhou, Q.; Li, C.; Ren, Q. Label-free imaging of zebrafish larvae in vivo by photoacoustic microscopy. Biomed. Opt. Express 2012, 3, 360–365. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.V. Photoacoustic Imaging and Spectroscopy; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Li, X.; Wei, W.; Zhou, Q.; Shung, K.K.; Chen, Z. Intravascular photoacoustic imaging at 35 and 80 MHz. J. Biomed. Opt. 2012, 17, 106005. [Google Scholar] [CrossRef] [PubMed]
- Lashkari, B.; Mandelis, A. Photoacoustic radar imaging signal-to-noise ratio, contrast, and resolution enhancement using nonlinear chirp modulation. Opt. Lett. 2010, 35, 1623–1625. [Google Scholar] [CrossRef] [PubMed]
- Shung, K.K. Diagnostic Ultrasound: Imaging and Blood Flow Measurements; Taylor & Francis: Boca Raton, FL, USA, 2006. [Google Scholar]
- Beard, P. Biomedical photoacoustic imaging. Interface Focus 2011, 1, 602–631. [Google Scholar] [CrossRef] [PubMed]
- Wei, W.; Li, X.; Zhou, Q.; Shung, K.K.; Chen, Z. Integrated ultrasound and photoacoustic probe for co-registered intravascular imaging. J. Biomed. Opt. 2011, 16, 106001–106006. [Google Scholar] [CrossRef] [PubMed]
- Szabo, T.L. Diagnostic Ultrasound Imaging: Inside Out; Elsevier Academic Press: London, UK, 2004. [Google Scholar]
- Qiu, W.; Yu, Y.; Chabok, H.R.; Liu, C.; Tsang, F.K.; Zhou, Q.; Shung, K.K.; Zheng, H.; Sun, L. A flexible annular-array imaging platform for micro-ultrasound. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 178–186. [Google Scholar] [PubMed]
- Shung, K.K.; Smith, M.; Tsui, B.M.W. Principles of Medical Imaging; Academic Press, Inc.: San Diego, CA, USA, 1992. [Google Scholar]
- Spencer, H.M.; Rodgers, J.M.; Hoffman, J.M. Optical Design of a Panoramic, Wide Spectral Band, Infrared Fisheye Lens. In Proceedings of the 2006 International Society for Optics and Photonics, Vancouver, BC, Canada, 18 July 2006; SPIE: Bellingham, WA, USA, 2006. [Google Scholar]
- Martin, H.L.; Kuban, D.P.; Zimmermann, S.D.; Busko, N. Omniview Motionless Camera Orientation System. U.S. Patent 7714936 B1, 11 May 2010. [Google Scholar]
- Gormley, A. Multiple Security Video Display. U.S. Patent 5258837 A, 2 November 1993. [Google Scholar]
- Heu, M. Fish Eye Lens System and Photographing Apparatus Including the Same. U.S. Patent 9182570 B2, 10 November 2015. [Google Scholar]
- Malacara-Hernández, D.; Malacara-Hernández, Z. Handbook of Optical Design; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Herzberger, M. Modern Geometrical Optics; Interscience Publisher: New York, NY, USA, 1958. [Google Scholar]
- Group, H. Technical Information and Data Download (Hoya Group Optics Division). Available online: http://www.Hoya-opticalworld.Com/english/datadownload/index.html (accessed on 15 December 2016).
- Welford, W.T. Aberrations of Optical Systems; CRC Press: Boca Raton, FL, USA, 1986. [Google Scholar]
- Qiu, W.; Yu, Y.; Tsang, F.K.; Sun, L. A multifunctional, reconfigurable pulse generator for high-frequency ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1558–1567. [Google Scholar] [PubMed]
- Choi, H.; Li, X.; Lau, S.-T.; Hu, C.; Zhou, Q.; Shung, K.K. Development of integrated preamplifier for high-frequency ultrasonic transducers and low-power handheld receiver. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 2646–2658. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Lam, K.H.; Zheng, H.; Qiu, W.; Shung, K.K. Piezoelectric single crystal ultrasonic transducers for biomedical applications. Prog. Mater. Sci. 2014, 66, 87–111. [Google Scholar] [CrossRef] [PubMed]







© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Ryu, J.; Kim, J. A Novel Fisheye-Lens-Based Photoacoustic System. Sensors 2016, 16, 2185. https://doi.org/10.3390/s16122185
Choi H, Ryu J, Kim J. A Novel Fisheye-Lens-Based Photoacoustic System. Sensors. 2016; 16(12):2185. https://doi.org/10.3390/s16122185
Chicago/Turabian StyleChoi, Hojong, Jaemyung Ryu, and Jungsuk Kim. 2016. "A Novel Fisheye-Lens-Based Photoacoustic System" Sensors 16, no. 12: 2185. https://doi.org/10.3390/s16122185
APA StyleChoi, H., Ryu, J., & Kim, J. (2016). A Novel Fisheye-Lens-Based Photoacoustic System. Sensors, 16(12), 2185. https://doi.org/10.3390/s16122185