A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation



Abstract
:1. Introduction
2. The Adaptive Kalman Filter and the H-Infinity Filter
2.1. The Adaptive Kalman Filter
2.2. Basic Principle of the H-Infinity Filter
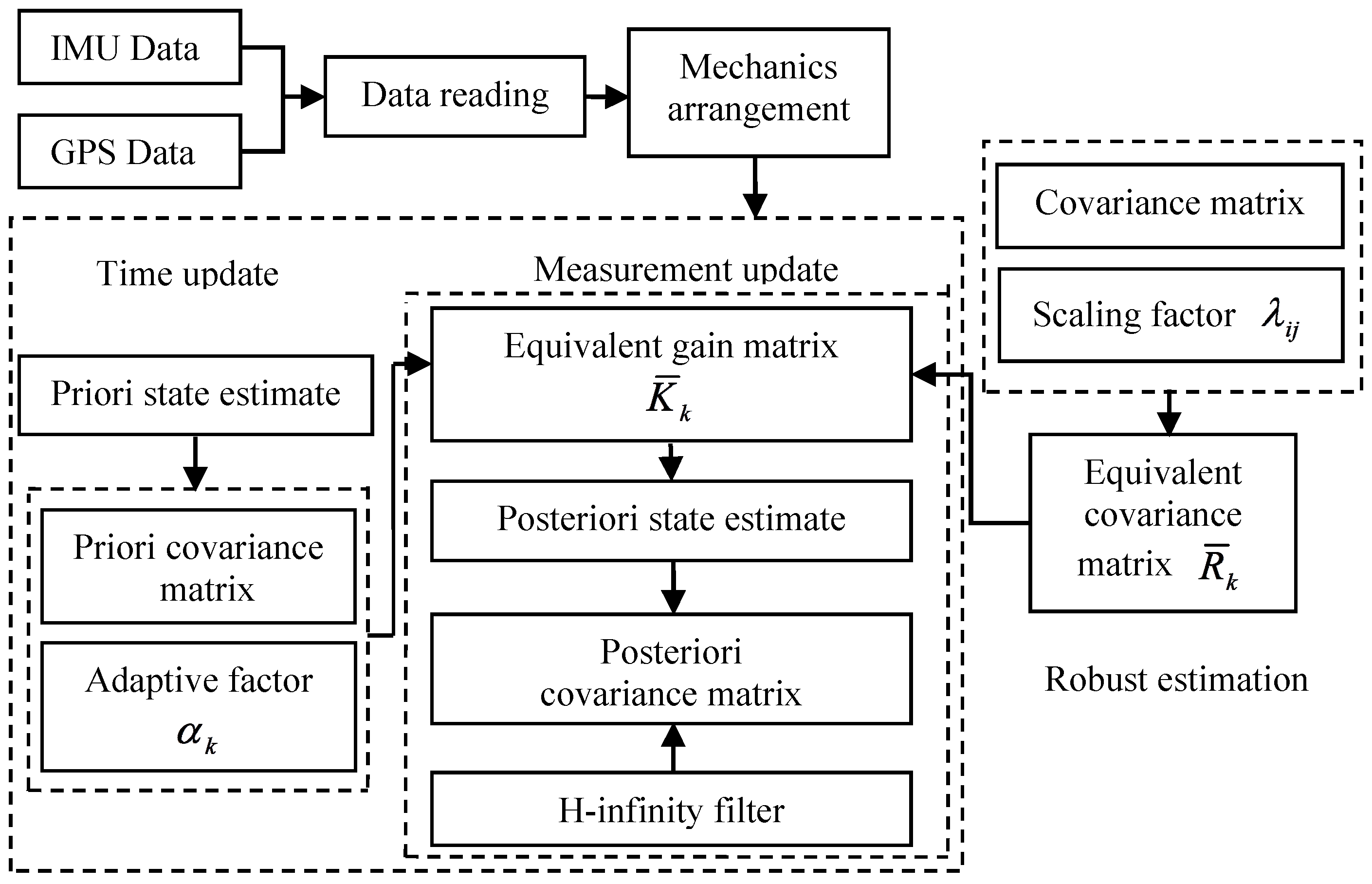
3. A Novel Adaptive H-Infinity Filtering Algorithm
4. The GPS/INS Integrated Navigation
5. Test Cases and Data Analysis
5.1. Test Case 1
5.2. Test Case 2
5.2.1. Experiments without Outliers
5.2.2. Experiments with Outliers
6. Conclusions
- (1)
- The adaptive Kalman filtering algorithms were developed in order to reduce the positioning errors, and the proper adaptive factors were selected. The H-infinity filtering algorithm performed well in the GPS/INS integrated navigation system that contained the uncertainties. However, the performance was greatly affected by the outliers.
- (2)
- The integration of the adaptive Kalman filter, the H-infinity filter, and the robust estimation method provided the AHF algorithm, which can address the deviations caused by dynamic model errors and interference. Since the proposed algorithm was verified by real data, a wide application of the proposed AHF algorithm in dynamic navigation and positioning can be expected.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Sang, S.B.; Zhai, R.Y.; Zhang, W.D.; Sun, Q.R.; Zhou, Z.Y. A self-developed indoor three-dimensional pedestrian localization platform based on MEMS sensors. Sens. Rev. 2015, 35, 157–167. [Google Scholar] [CrossRef]
- Neto, P.; Mendes, N.; Moreira, A.P. Kalman filter-based yaw angle estimation by fusing inertial and magnetic sensing: A case study using low cost sensors. Sens. Rev. 2015, 35, 244–250. [Google Scholar] [CrossRef]
- Wan, E.A.; van der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000, Adaptive Systems for Signal Processing, Communications and Control Symposium (AS-SPCC), Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158.
- Abd Rabbou, M.; El-Rabbany, A. Integration of GPS precise point positioning and MEMS-based INS using unscented particle filter. Sensors 2015, 15, 7228–7245. [Google Scholar] [CrossRef] [PubMed]
- Gustafsson, F. Particle filter theory and practice with positioning applications. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 53–82. [Google Scholar] [CrossRef]
- Koch, K.R.; Yang, Y.X. Robust Kalman filter for rank deficient observation model. J. Geod. 1998, 72, 436–441. [Google Scholar] [CrossRef]
- Gandhi, M.A.; Mili, L. Robust Kalman filter based on a generalized maximum-likelihood-type estimator. IEEE Trans. Signal Process. 2010, 58, 2509–2520. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Ding, W.D.; Wang, J.L.; Rizos, C.; Kinlyside, D. Improving adaptive Kalman estimation in GPS/INS integration. J. Navig. 2007, 60, 517–529. [Google Scholar] [CrossRef]
- Yang, Y.X.; Xu, T.H. An adaptive Kalman filter based on Sage windowing weights and variance components. J. Navig. 2003, 56, 231–240. [Google Scholar] [CrossRef]
- Yang, Y.X.; Gao, W.G. An optimal adaptive Kalman filter. J. Geod. 2006, 80, 177–183. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Zhao, Y.W. Performance evaluation of cubature Kalman filter in a GPS/IMU tightly-coupled navigation system. Signal Process. 2016, 119, 67–79. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Quality Control in Integrated Navigation Systems. In Proceedings of the IEEE Symposium on Position Location and Navigation. A Decade of Excellence in the Navigation Sciences (IEEE PLANS’90), Las Vegas, NV, USA, 20–23 March 1990; pp. 158–165.
- Yang, Y.X.; He, H.B.; Xu, G.C. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Yang, Y.X.; Ren, X.; Xu, Y. Main progress of adaptively robust filter with applications in navigation. J. Navig. Position. 2013, 1, 9–15. [Google Scholar]
- Yang, Y.X.; Gao, W.G. Comparison of two fading filters and adaptively robust filter. Geosp. Inf. Sci. 2007, 10, 200–203. [Google Scholar] [CrossRef]
- Yang, Y.X.; Cui, X.Q. Adaptively robust filter with multi adaptive factors. Surv. Rev. 2008, 40, 260–270. [Google Scholar] [CrossRef]
- Chang, G.B. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Zhang, Q.Z.; Meng, X.L.; Zhang, S.B.; Wang, Y.J. Singular value decomposition-based robust cubature Kalman filtering for an integrated GPS/SINS navigation system. J. Navig. 2015, 68, 549–562. [Google Scholar] [CrossRef]
- Zhao, L.; Qiu, H.Y.; Feng, Y.M. Analysis of a robust Kalman filter in loosely coupled GPS/INS navigation system. Measurement 2016, 80, 138–147. [Google Scholar] [CrossRef]
- Duan, Z.S.; Zhang, J.X.; Zhang, C.S.; Mosca, E. Robust and filtering for uncertain linear systems. Automatica 2006, 42, 1919–1926. [Google Scholar] [CrossRef]
- Hassibi, B.; Kailath, T. H∞ Adaptive Filtering. In Proceedings of the 1995 International Conference on IEEE Acoustics, Speech, and Signal Processing (ICASSP-95), Detroit, MI, USA, 9–12 May 1995; Volume 2, pp. 949–952.
- Zhou, J.W. Classical theory of errors and robust estimation. Acta Geod. Cartogr. Sin. 1989, 18, 115–120. [Google Scholar]
- Yang, Y.X. Robust estimation of geodetic datum transformation. J. Geod. 1999, 73, 268–274. [Google Scholar] [CrossRef]
- Yang, Y.X.; Xu, T.H. GNSS receiver autonomous integrity monitoring (RAIM) algorithm based on robust estimation. Geod. Geodyn. 2016, 7, 117–123. [Google Scholar] [CrossRef]
- Almagbile, A.; Wang, J.L.; Ding, W.D. Evaluating the performances of adaptive Kalman filter methods in GPS/INS integration. J. Glob. Position. Syst. 2010, 9, 33–40. [Google Scholar] [CrossRef]
- Yang, Y.X. Adaptive Navigation and Dynamic Positioning; Surveying and Mapping Press: Beijing, China, 2006. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H∞ and Nonlinear Approaches; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Chen, Y.R.; Yuan, J.P. An improved robust multiple fading fault-tolerant algorithm for INS/GPS integrated navigation. J. Astronaut. 2009, 30, 930–936. [Google Scholar]
- Hassibi, C.; Sayed, A.H.; Kailath, T. Linear estimation in Krein spaces-part II: Applications. IEEE Trans. Automat. Control 1996, 41, 34–49. [Google Scholar] [CrossRef]
- Yang, Y.X.; Song, L.J.; Xu, T.H. Robust parameter estimation for geodetic correlated observations. Acta Geod. Cartogr. Sin. 2002, 31, 95–99. [Google Scholar]
- Zhang, Q.Z.; Stephenson, S.; Meng, X.L.; Zhang, S.B.; Wang, Y.J. A new robust filtering for a GPS/INS loosely coupled integration system. Surv. Rev. 2016, 48, 181–187. [Google Scholar] [CrossRef]
- Gao, W.G.; Yang, Y.X.; Zhang, S.C. Adaptive robust Kalman filtering based on the current statistical model. Acta Geod. Cartogr. Sin. 2006, 35, 15–18. [Google Scholar]
- Gleason, S.; Gebre-Egziabher, D. GNSS Applications and Methods; Artech House: London, UK, 2009. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axis | KF | AKF | HF | AHF |
|---|---|---|---|---|
| 0.046 | 0.043 | 0.039 | 0.035 | |
| 0.047 | 0.045 | 0.038 | 0.034 | |
| 0.058 | 0.049 | 0.043 | 0.042 |
| Axis | KF | AKF | HF | AHF |
|---|---|---|---|---|
| 0.129 | 0.105 | 0.096 | 0.078 | |
| 0.284 | 0.251 | 0.204 | 0.121 | |
| 0.188 | 0.160 | 0.128 | 0.094 |
| Axis | KF | AKF | HF | AHF |
|---|---|---|---|---|
| 0.446 | 0.282 | 0.232 | 0.083 | |
| 0.494 | 0.338 | 0.298 | 0.128 | |
| 0.413 | 0.266 | 0.222 | 0.099 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Zhang, S.-B.; Zhang, Q.-Z. A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation. Sensors 2016, 16, 2127. https://doi.org/10.3390/s16122127
Jiang C, Zhang S-B, Zhang Q-Z. A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation. Sensors. 2016; 16(12):2127. https://doi.org/10.3390/s16122127
Chicago/Turabian StyleJiang, Chen, Shu-Bi Zhang, and Qiu-Zhao Zhang. 2016. "A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation" Sensors 16, no. 12: 2127. https://doi.org/10.3390/s16122127
APA StyleJiang, C., Zhang, S.-B., & Zhang, Q.-Z. (2016). A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation. Sensors, 16(12), 2127. https://doi.org/10.3390/s16122127