
Cramer-Rao Lower Bound Evaluation for Linear Frequency Modulation Based Active Radar Networks Operating in a Rice Fading Environment


Abstract
:1. Introduction
1.1. Related Works and Motivation
1.2. Major Contributions
- (1)
- We formulate the linear frequency modulation (LFM) signal model and derive the log-likelihood function of the received signal for a Rician target. The Rician target model is composed of DS component and WIS components, which are the signals received after striking from the target [21,22]. It is worth pointing out here that [15,16,27] only study the target parameter estimation accuracy limits either when the target’ radar cross section (RCS) observes as a Rayleigh model in a non-coherent scenario or the target is modeled as a point target in a coherent scenario for all the transmitter-receiver pairs [23]. While utilizing a Rician target model, the estimation performance can be generalized and evaluated when the target has different RCS models for different transmitter-receiver pairs.
- (2)
- On the basis of the previous works [15,16,17,18,19,20,21,22,23,24,29], almost all the studies concentrate on stationary platforms. In this paper, we build an LFM-based active radar network configuration and extend it to a more general case, which consist of multiple radar transmitters and multichannel receivers placed on moving platforms. On the other hand, only the CRLBs for LFM-based bistatic radar channels are computed in [29]. To the best of our knowledge, the CRLB for an LFM-based radar network has not been derived. Thus, the joint CRLB for position and velocity estimation of a Rician target in LFM-based radar networks is computed, where we assume that the signals scattered off the target due to different radar transmitters can be received and separated at the receivers. The cumulative Fisher information matrix (FIM) can be factored into two terms: one term accounting for the effect of the DS component, and another incorporating the effect of the WIS components.
- (3)
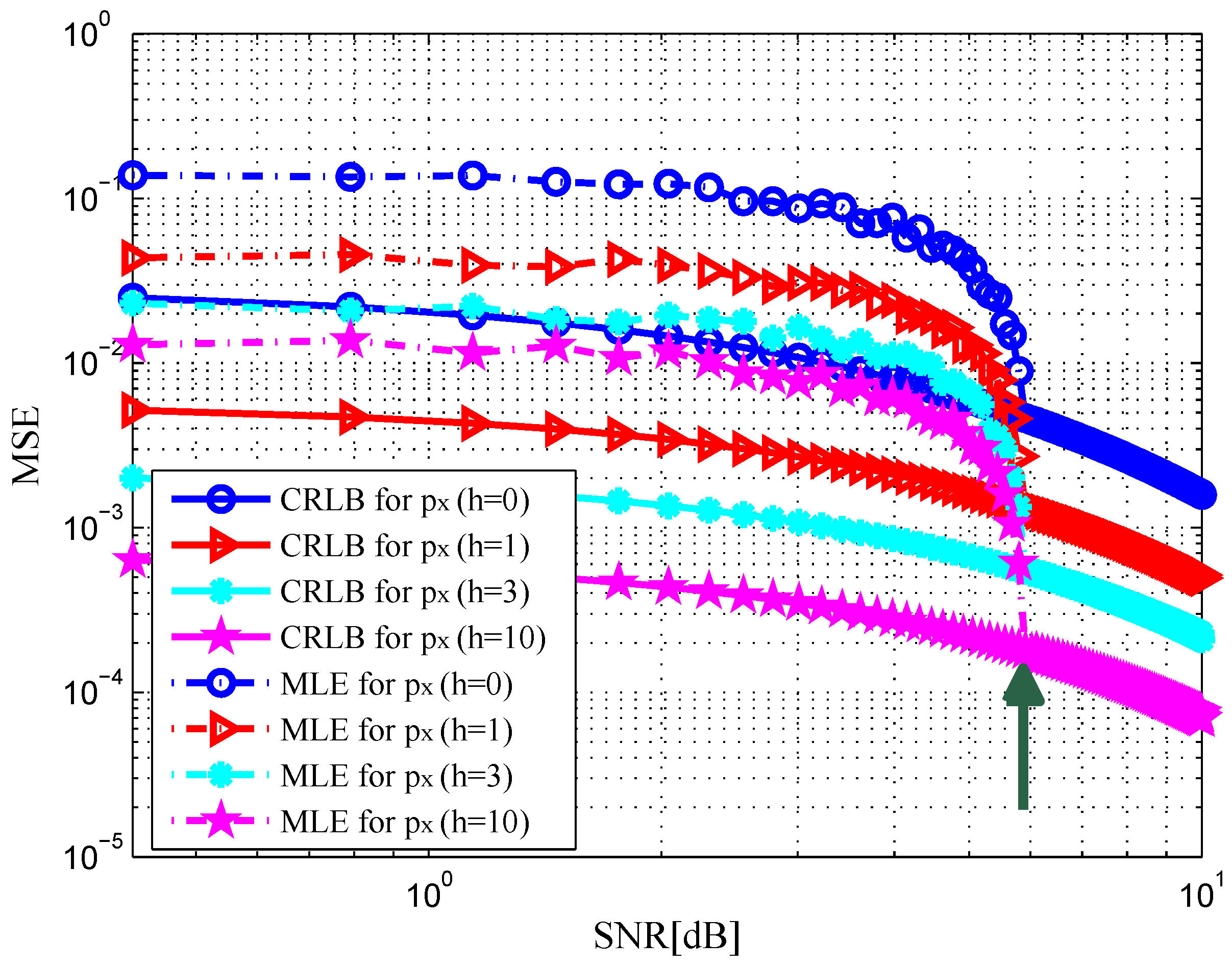
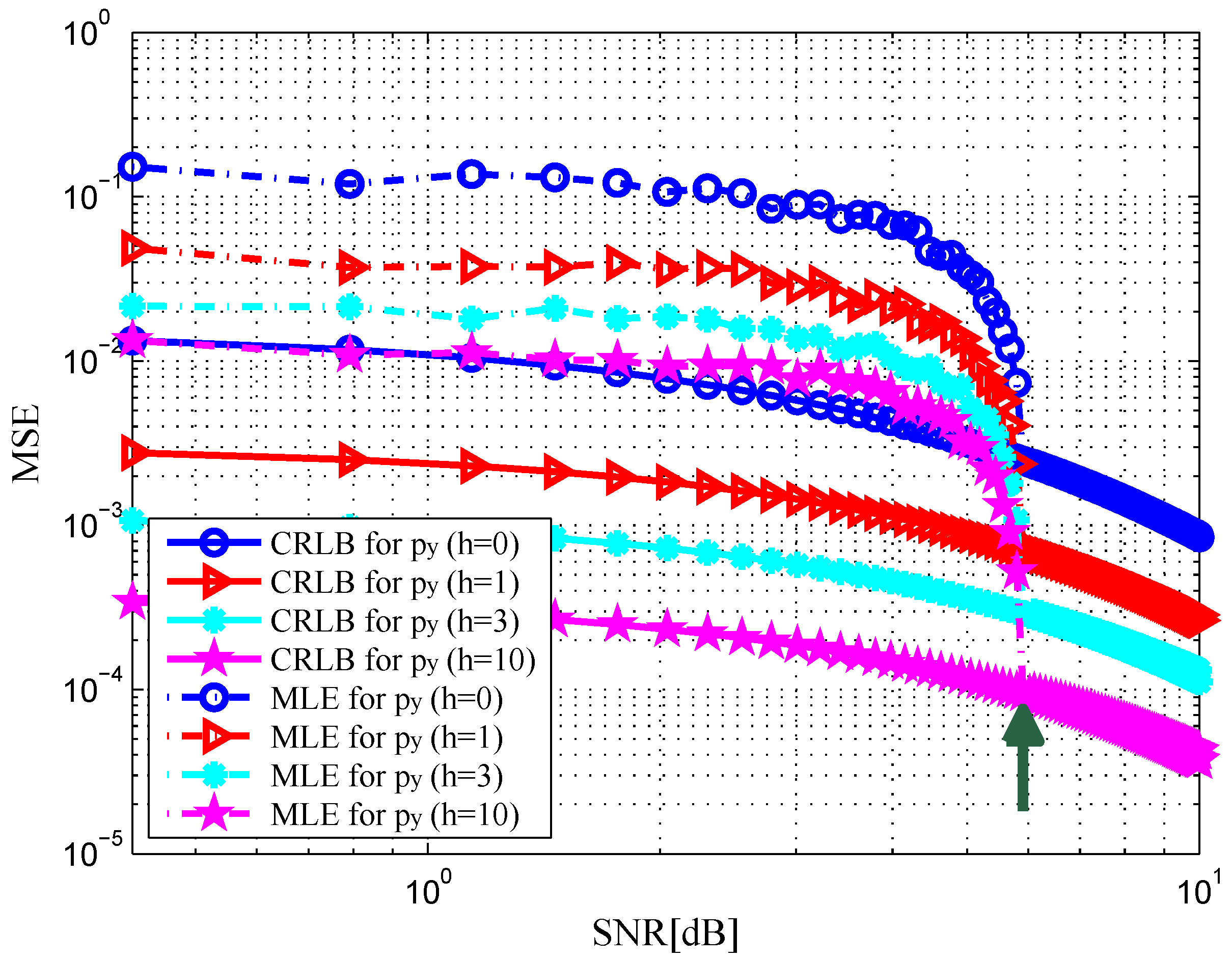
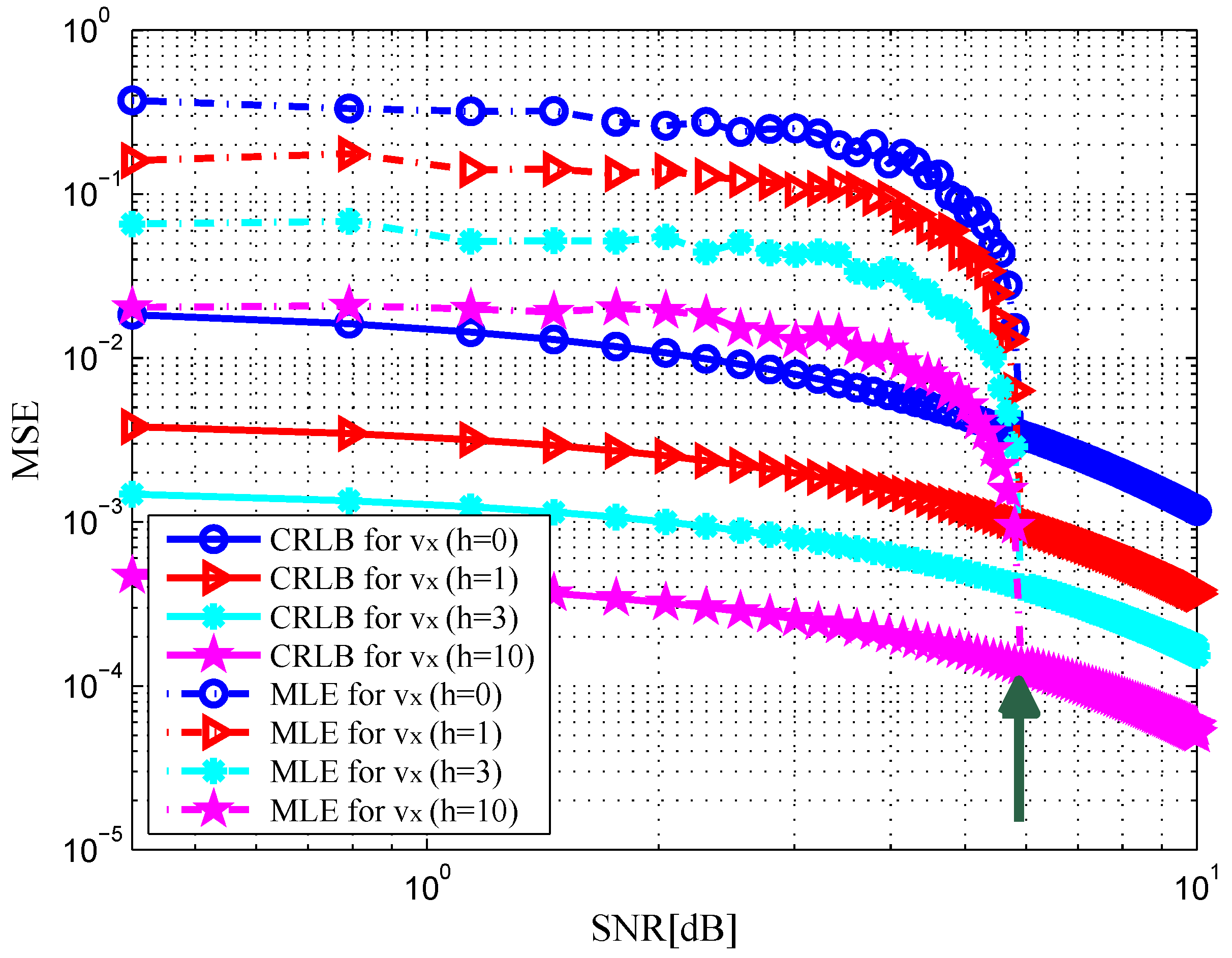
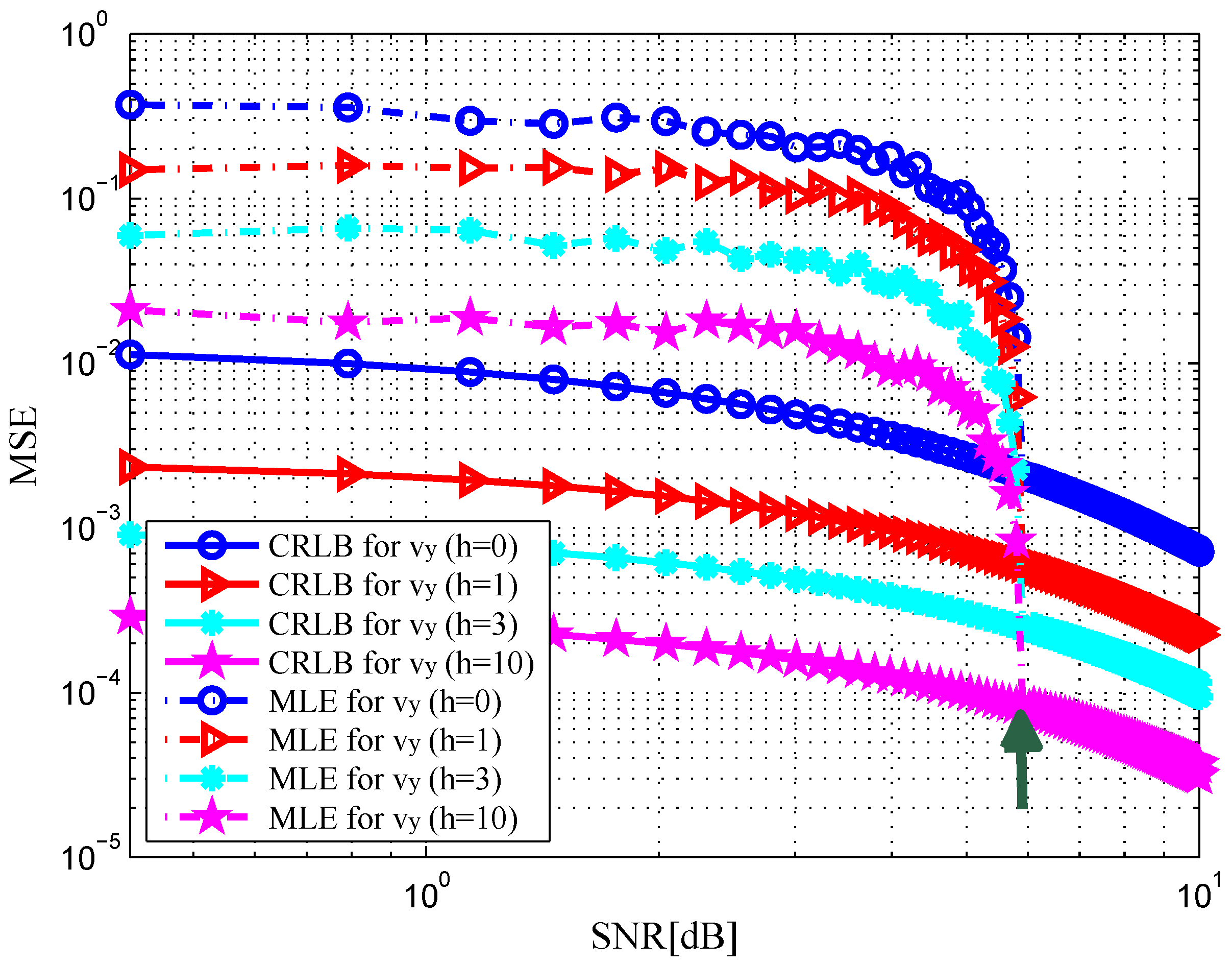
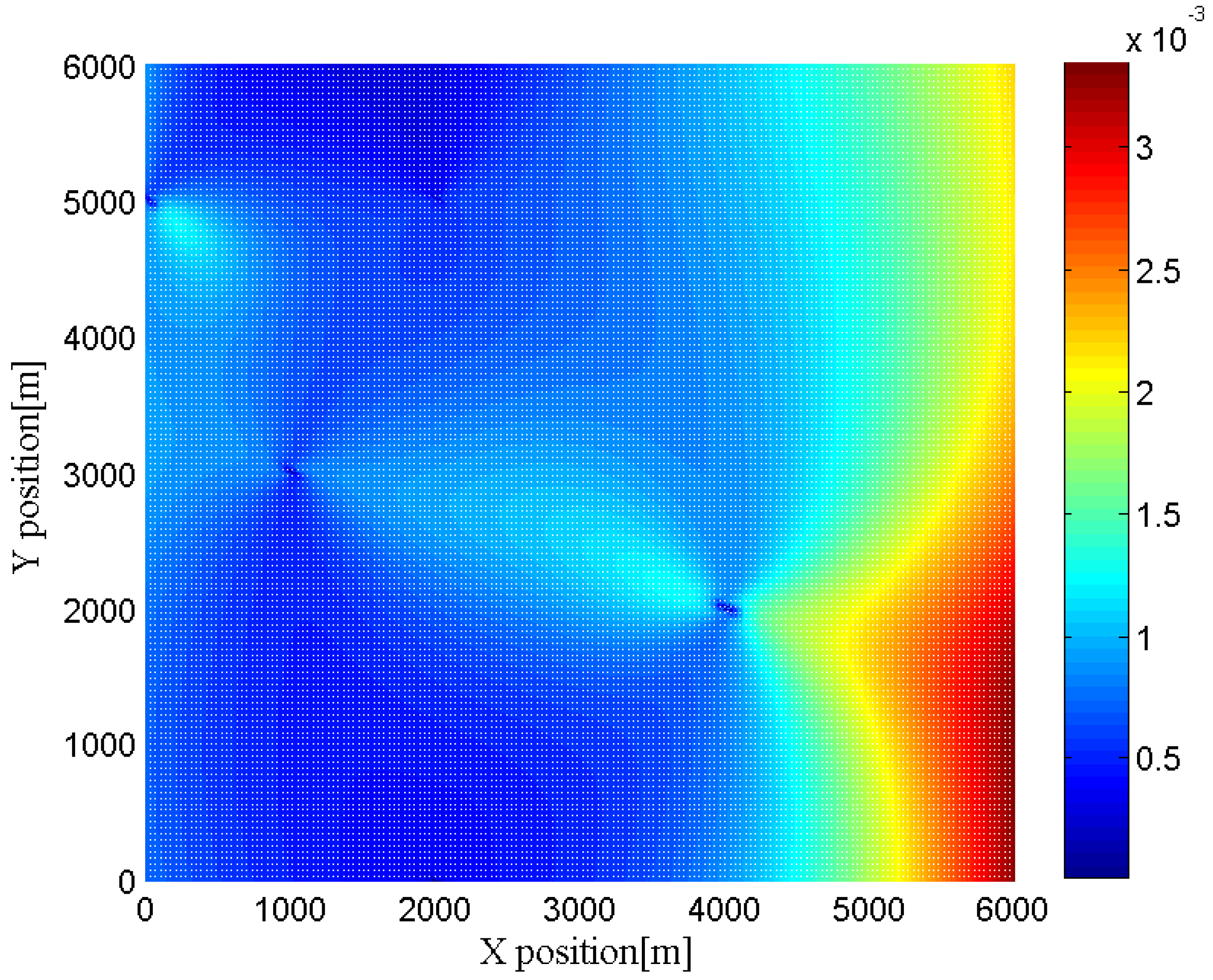
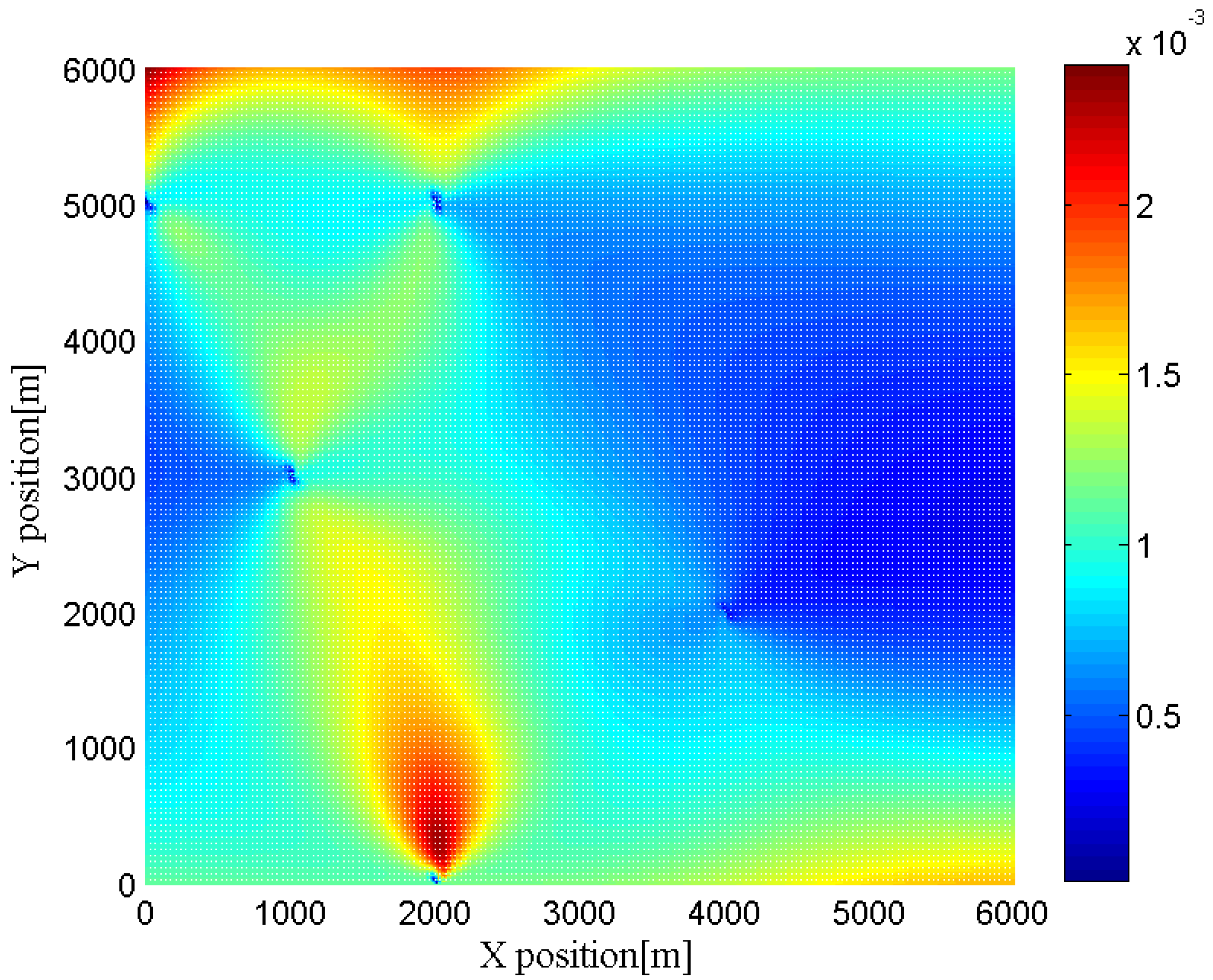
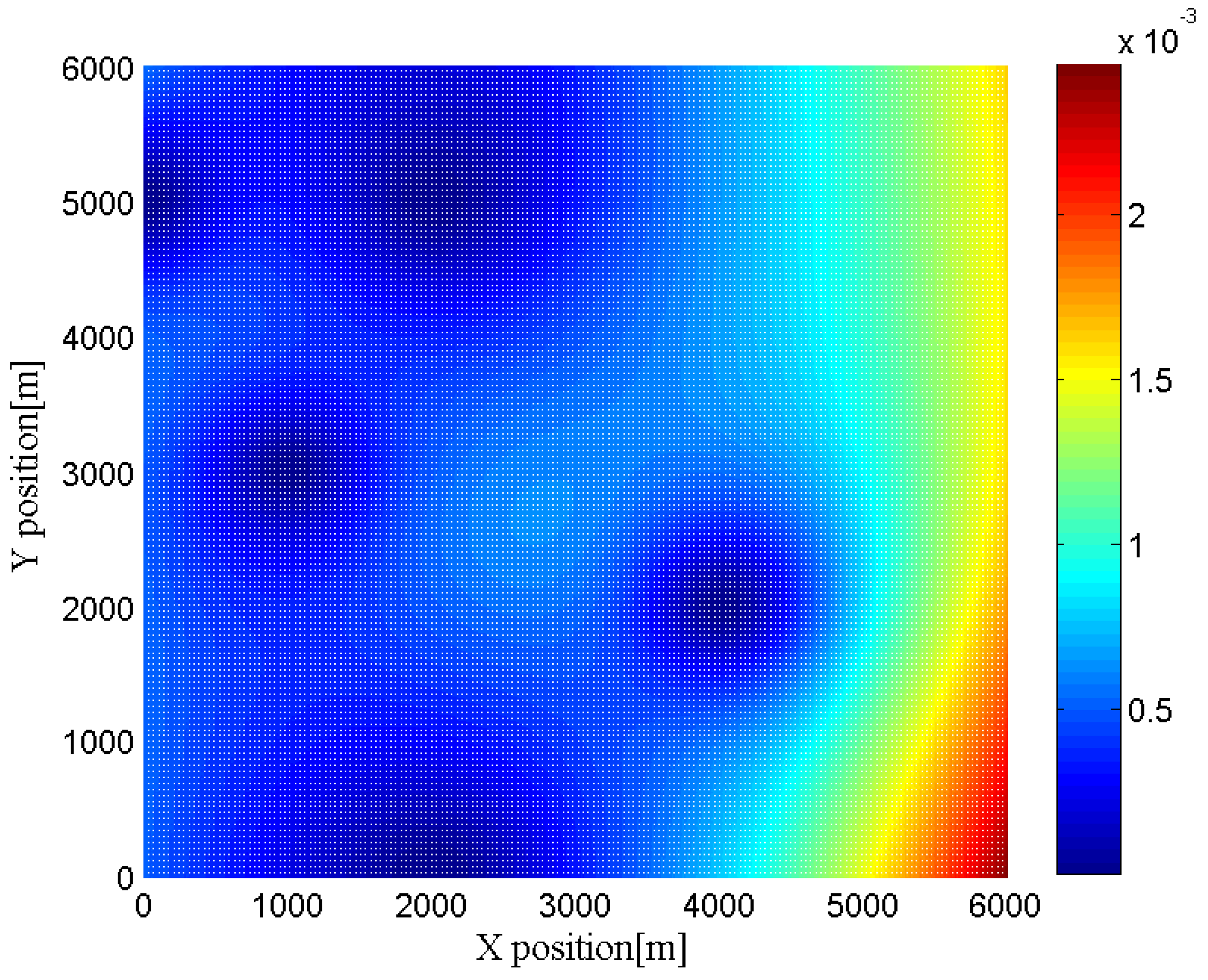
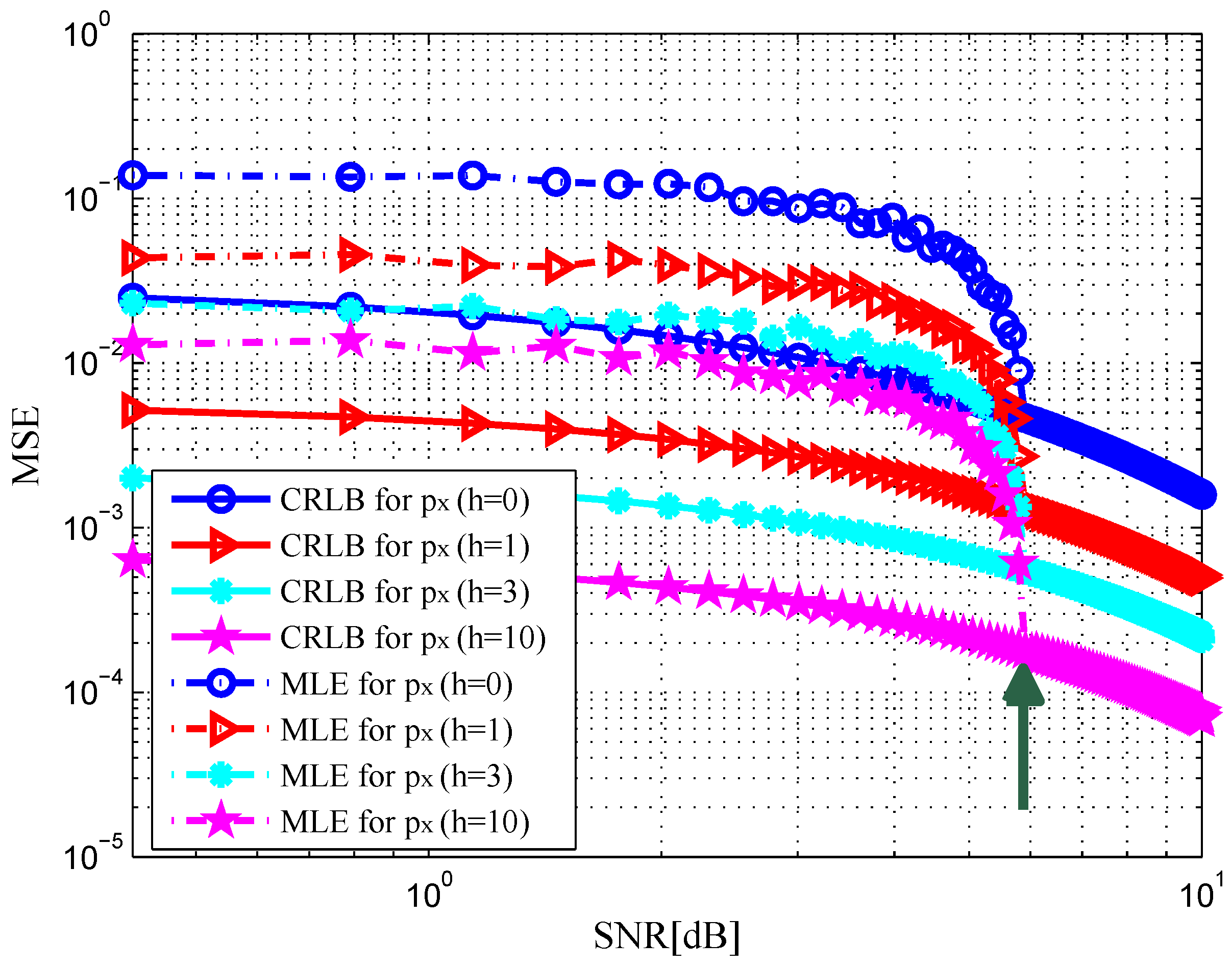
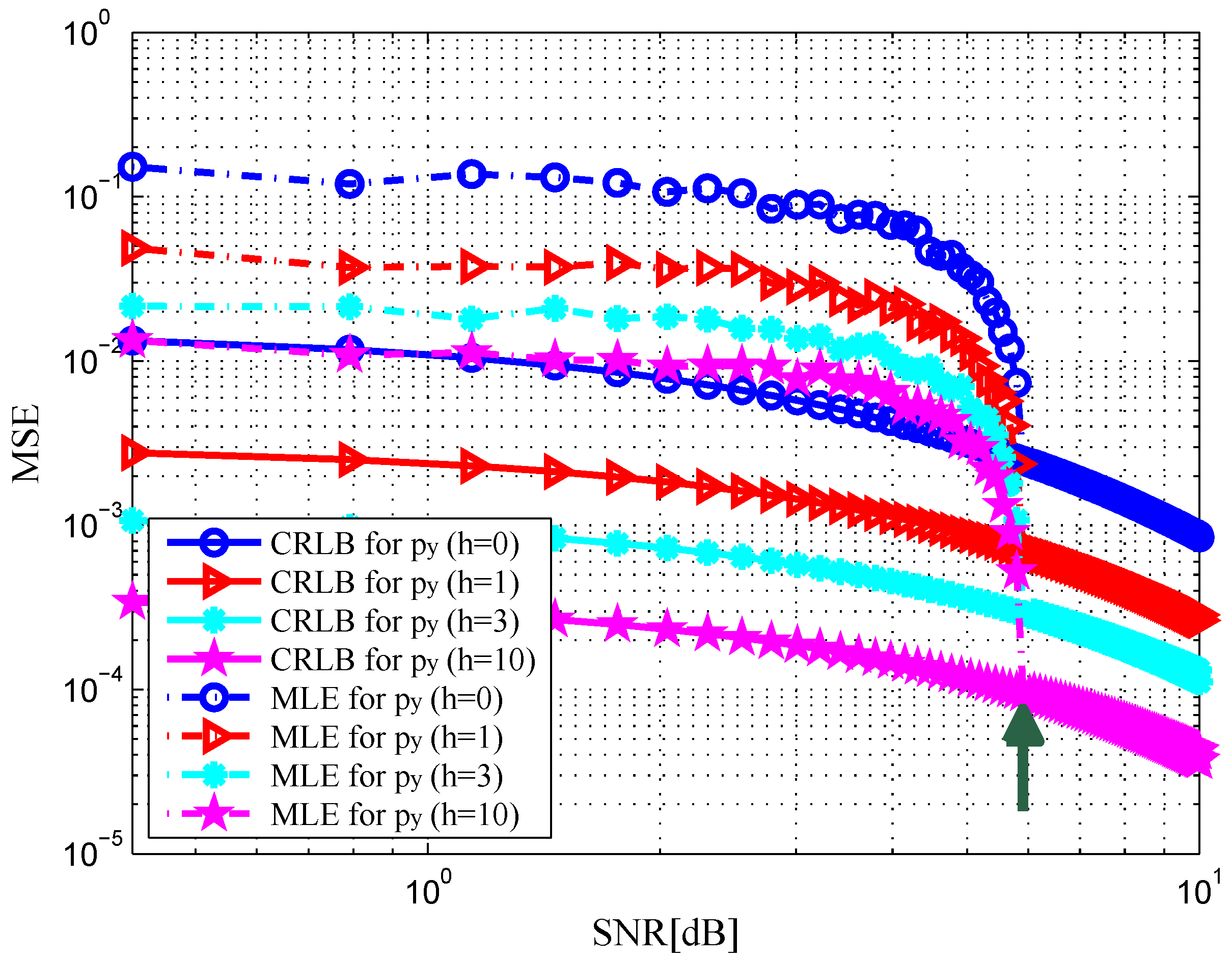
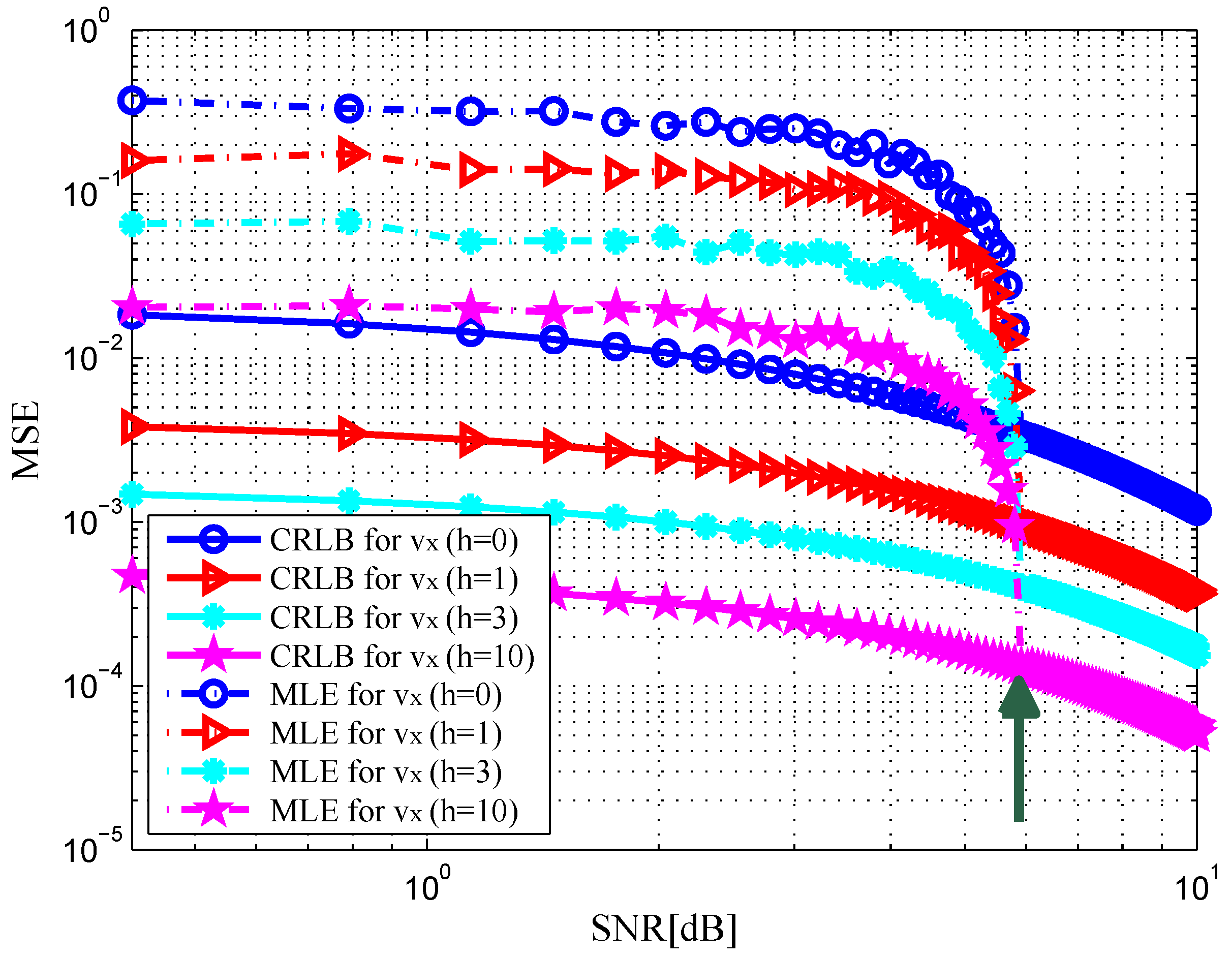
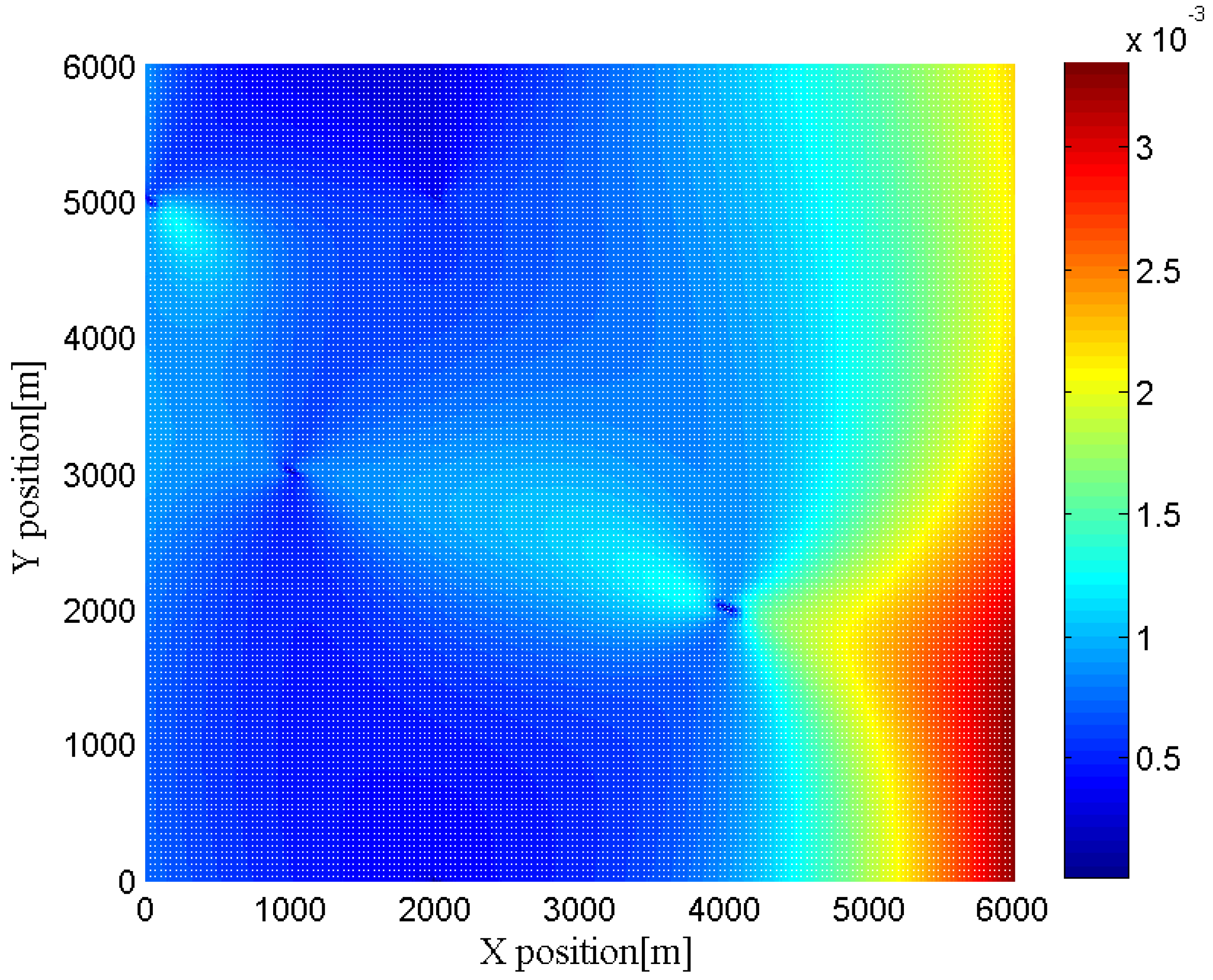
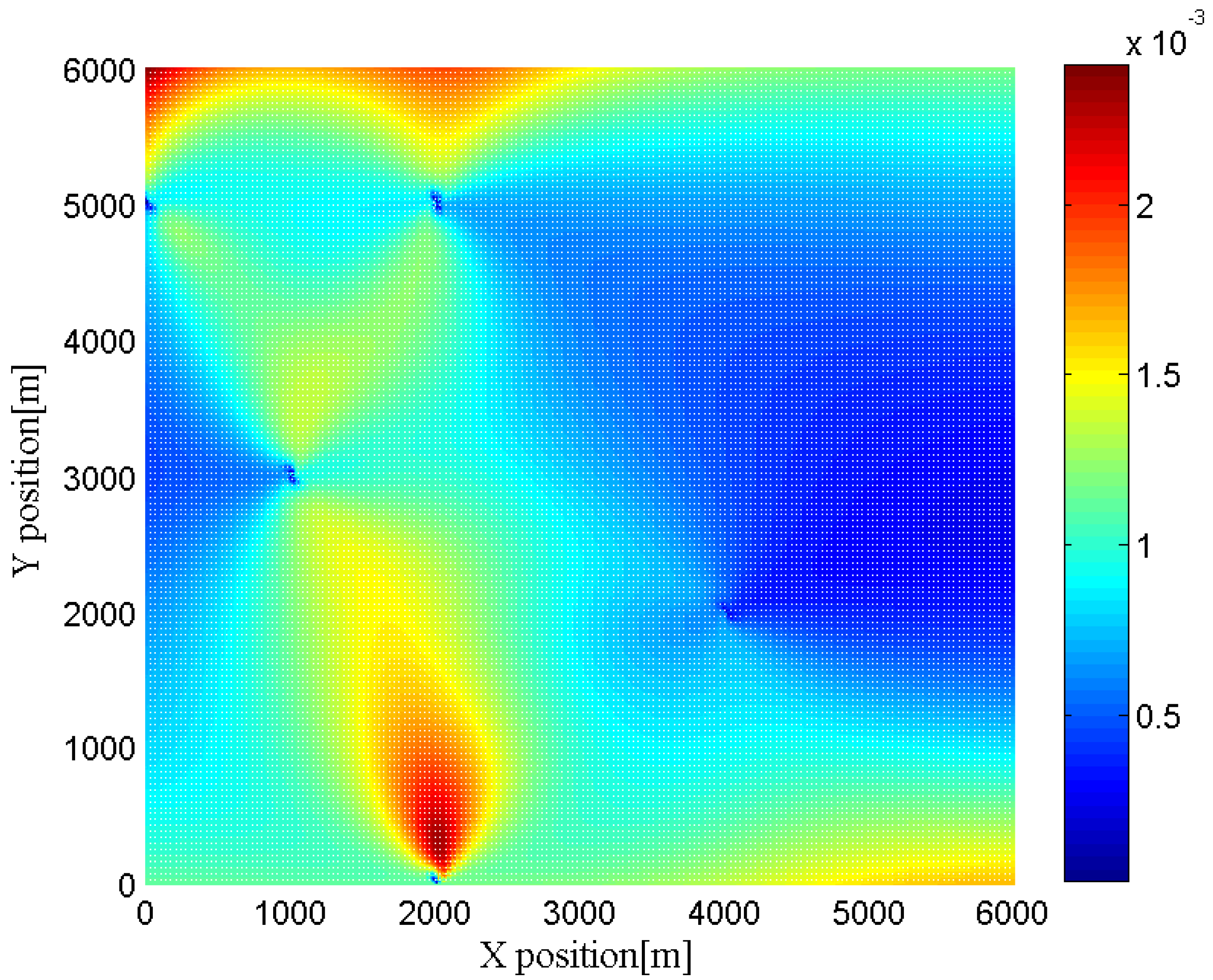
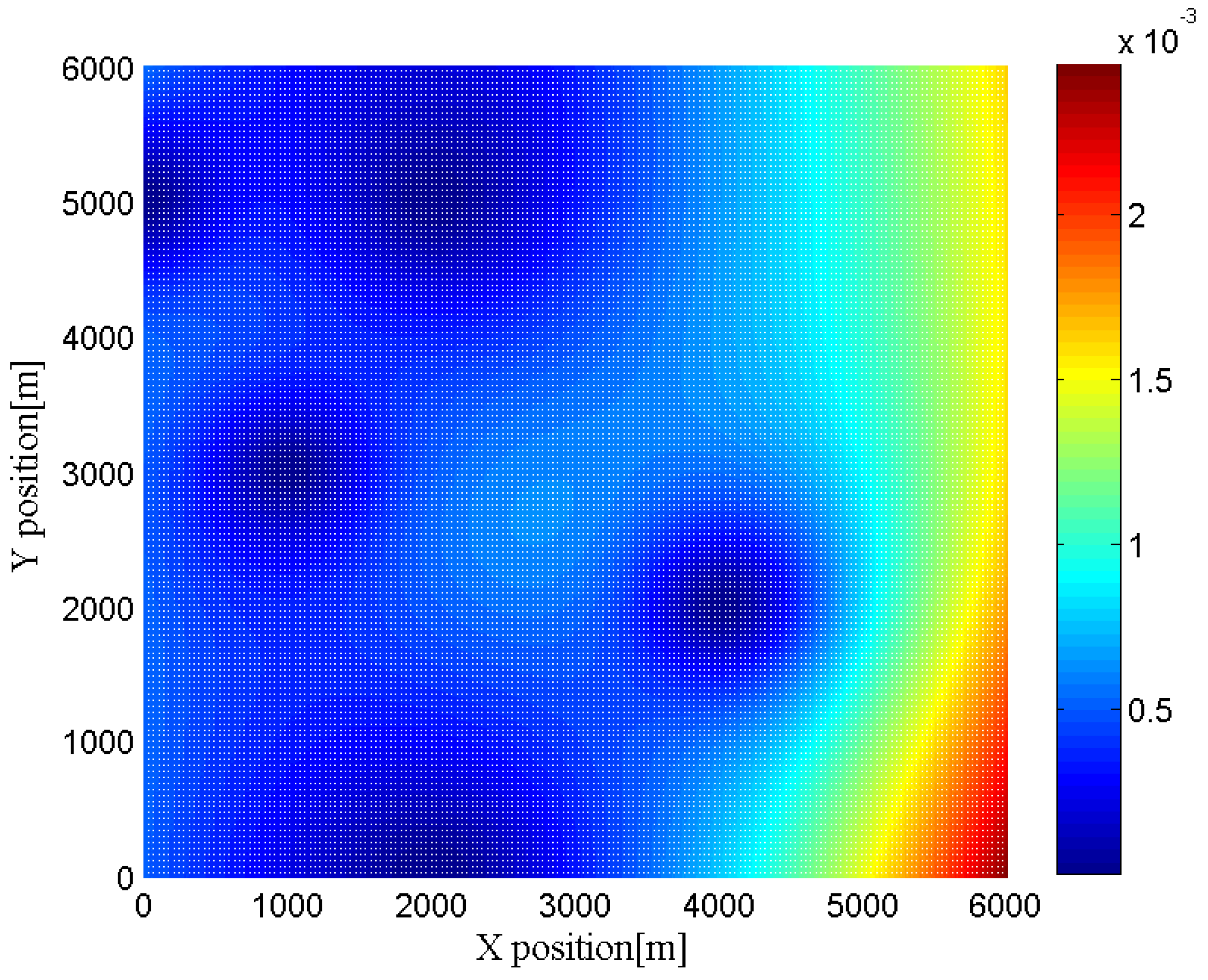
- Simulation results have shown that the DS component can be exploited to decrease the target parameter estimation errors, which is due to the fact that the reception of DS component increases the received SNR at the radar receiver. Previous results in [20,29] only show that the CRLB is a function of the signal parameters as well as the geometry between the target and the radar network architecture. In this paper, the effects of SNR and target’s RCS on the target parameter estimation performance are also analyzed. It is demonstrated that the joint CRLB is not only a function of SNR, target’s RCS and transmitted waveform parameters, but also a function of the geometry between the target and the active radar network systems.
- (4)
- The closed-form expressions of CRLB can be used as a performance metric to access the target estimation performance for LFM-based active radar networks in a Rice fading environment. Since the DS component can be exploited to increase the received SNR at the receiver, the geometry-dependent CRLB analysis will open up a new dimension for active radar network systems by aiding the optimal power allocation for radar networks to achieve a given estimation requirement with the minimum system cost.
1.3. Outline of the Paper
2. Signal Model
3. Derivation of Joint Cramer-Rao Lower Bound
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. The Derivation of FIM J(Q)
Appendix B. The Elements of FIM Jij(U)
References
- Li, J.; Stoica, P. MIMO Radar Signal Processing; Wiley: Hoboken, NJ, USA, 2009; pp. 348–381. [Google Scholar]
- Pace, P.E. Detecting and Classifying Low Probability of Intercept Radar; Artech House: Boston, MA, USA, 2009; pp. 319–378. [Google Scholar]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J., Jr. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Fisher, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, R. Spatial diversity in radars-models and detection performance. IEEE Trans. Signal Process. 2006, 54, 823–836. [Google Scholar] [CrossRef]
- Naghsh, M.M.; Mahmoud, M.H.; Shahram, S.P.; Soltanalian, M.; Stoica, P. Unified optimization framework for multi-static radar code design using information-theoretic criteria. IEEE Trans. Signal Process. 2013, 61, 5401–5416. [Google Scholar] [CrossRef]
- Niu, R.X.; Blum, R.S.; Varshney, P.K.; Drozd, A.L. Target localization and tracking in noncoherent multiple-input multiple-output radar systems. IEEE Trans. Aerosp. Electron. Syst. 2010, 48, 1466–1487. [Google Scholar] [CrossRef]
- Godrich, H.; Tajer, A.; Poor, H.V. Distributed Target Tracking in Multiple Widely Separated Radar Architectures. In Proceedings of the 2012 7th IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Hoboken, NJ, USA, 17–20 June 2012; pp. 153–156.
- Chen, Y.F.; Nijsure, Y.; Yuen, C.; Chew, Y.H.; Ding, Z.G. Adaptive distributed MIMO radar waveform optimization based on mutual information. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1374–1385. [Google Scholar] [CrossRef]
- Godrich, H.; Petropulu, A.P.; Poor, H.V. Sensor selection in distributed multiple-radar architectures for localization: A knapsack problem formulation. IEEE Trans. Signal Process. 2012, 60, 247–259. [Google Scholar] [CrossRef]
- Song, X.F.; Willett, P.; Zhou, S.L. Optimal Power Allocation for MIMO Radars with Heterogeneous Propagation Losses. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 2465–2468.
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localization accuracy gain in MIMO radar-based systems. IEEE Trans. Inf. Theory 2010, 56, 2783–2803. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S.; Haimovich, A.M. Noncoherent MIMO radar for location and velocity estimation: More antennas means better performance. IEEE Trans. Signal Process. 2010, 58, 3661–3680. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. On MSE Performance of Time-Reversal MUSIC. In Proceedings of the 2014 IEEE 8th Sensor Array and Multichannel Signal Processing Workshop (SAM), A Coruna, Spain, 22–25 June 2014; pp. 13–16.
- Ciuonzo, D.; Romano, G.; Solimene, R. Performnce analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Wei, C.; He, Q.; Blum, R.S. Cramer-Rao Bound for Joint Location and Velocity Estimation in Multi-Target Non-Coherent MIMO Radars. In Proceedings of the 2010 44th IEEE Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 17–19 March 2010; pp. 1–6.
- He, Q.; Blum, R.S. Noncoherent versus coherent MIMO radar: Performance and simplicity analysis. Signal Process. 2012, 92, 2454–2463. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S. Cramer-Rao bound for MIMO radar target localization with phase errors. IEEE Signal Process. Lett. 2010, 17, 83–86. [Google Scholar]
- Zhao, T.; Huang, T.Y. Cramer-Rao lower bounds for the joint delay-Doppler estimation of an extended extended target. IEEE Trans. Signal Process. 2016, 64, 1562–1573. [Google Scholar] [CrossRef]
- Hu, J.B.; He, Q.; Blum, R.S. Comparing the Cramer-Rao Bounds for Distributed Radar with and without Previous Detection Information. In Proceedings of the IEEE China Summit and International Conference on Signal and Information Processing (ChinaSIP), Chengdu, China, 12–15 July 2015; pp. 334–338.
- Shi, C.G.; Wang, F.; Zhou, J.J. Cramer-Rao bound analysis for joint target position and velocity estimation in FM-based passive radar networks. IET Signal Process. 2016, 10, 780–790. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S. The significant gains from optimally processed multiple signals of opportunity and multiple receive stations in passive radar. IEEE Signal Process. Lett. 2014, 21, 180–184. [Google Scholar] [CrossRef]
- Filip, A.; Shutin, D. Cramer-Rao bounds for L-band digital aeronautical communication system type 1 based passive multiple-input multiple-output radar. IET Radar Sonar Navig. 2016, 10, 348–358. [Google Scholar] [CrossRef]
- Javed, M.N.; Ali, S.; Hassan, S.A. 3D MCRLB evaluation of a UMTS-based passive multistatic radar operating in a line-of-sight environment. IEEE Trans. Signal Process. 2016, 64, 5131–5144. [Google Scholar] [CrossRef]
- Shi, C.G.; Salous, S.; Wang, F.; Zhou, J.J. Modified Cramer-Rao lower bounds for joint position and velocity estimation of a Rician target in OFDM-based passive radar networks. Radio Sci. 2016. submitted. [Google Scholar]
- Shi, C.G.; Wang, F.; Zhou, J.J.; Zhang, H. Security Information Factor Based Low Probability of Identification in Distributed Multiple-Radar System. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, Australia, 19–24 April 2015; pp. 3716–3720.
- Shi, C.G.; Zhou, J.J.; Wang, F. LPI Based Resource Management for Target Tracking in Distributed Radar Network. In Proceedings of the IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5.
- Shi, C.G.; Wang, F.; Sellathurai, M.; Zhou, J.J.; Zhang, H. Robust transmission waveform design for distributed multiple-radar systems based on low probability of intercept. ETRI J. 2016, 38, 70–80. [Google Scholar] [CrossRef]
- Shi, C.G.; Wang, F.; Sellathurai, M.; Zhou, J.J. Transmitter subset selection in FM-based passive radar networks for joint target parameter estimation. IEEE Sens. J. 2016, 16, 6043–6052. [Google Scholar] [CrossRef]
- Greco, M.S.; Stinco, P.; Gini, F.; Farina, A. Cramer-Rao bounds and selection of bistatic channels for multistatic radar systems. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2934–2948. [Google Scholar] [CrossRef]
- Dogandzic, A.; Nehorai, A. Cramer-Rao bounds for estimating range, velocity, and direction with an active array. IEEE Trans. Signal Process. 2001, 49, 1122–1137. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
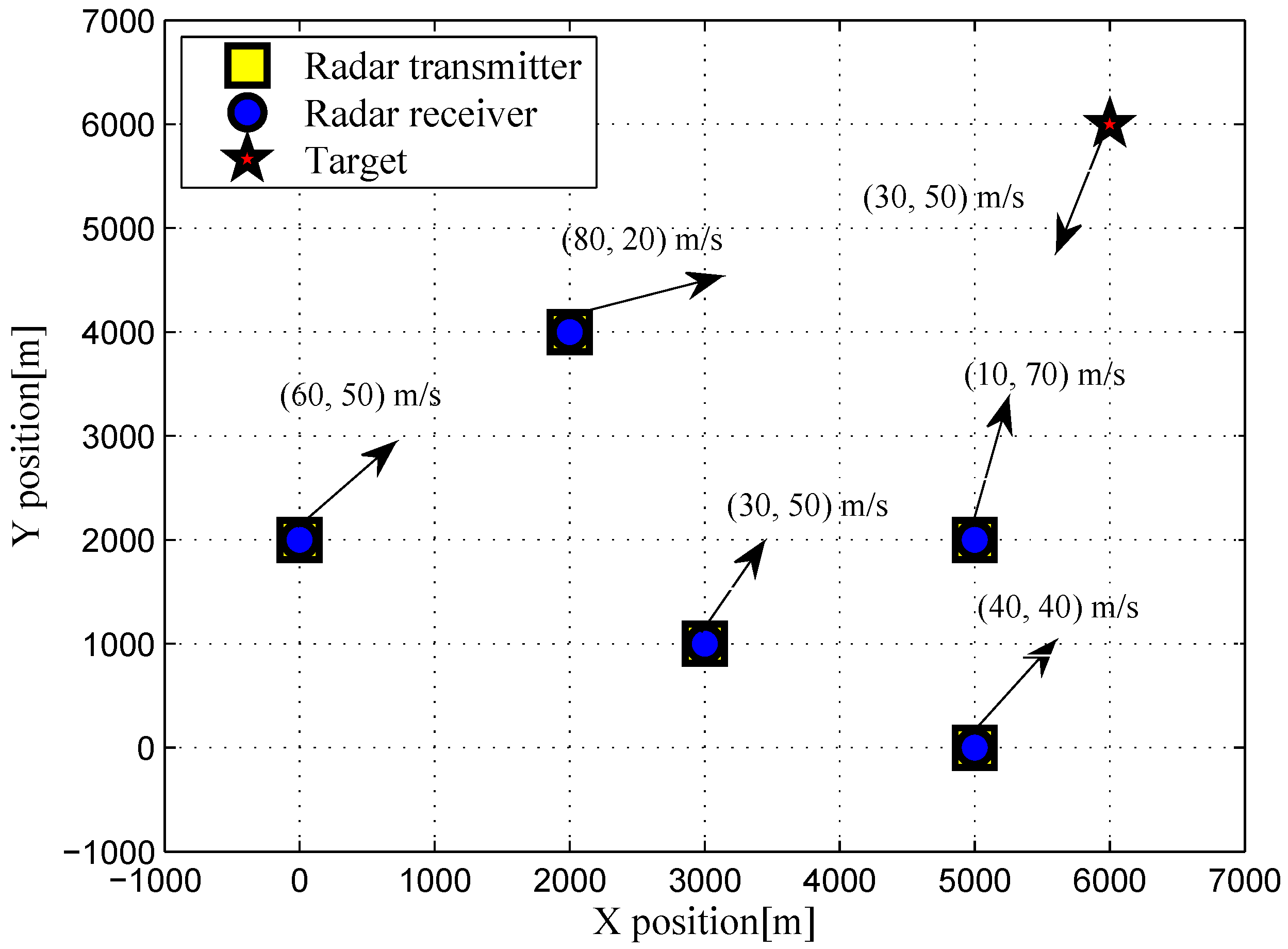
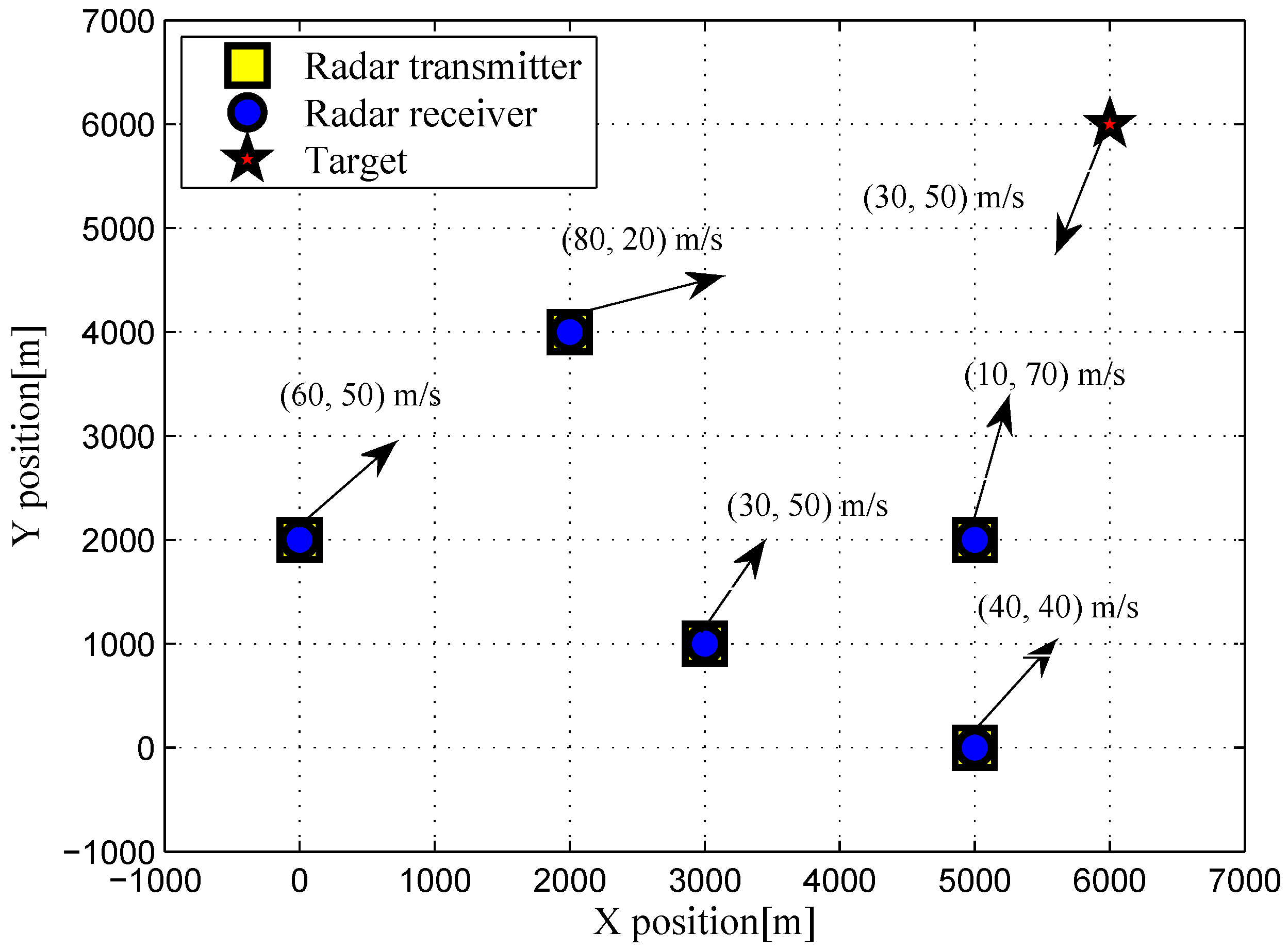
| Transmitter Index | Locations [m] | Velocities [m/s] |
|---|---|---|
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Salous, S.; Wang, F.; Zhou, J. Cramer-Rao Lower Bound Evaluation for Linear Frequency Modulation Based Active Radar Networks Operating in a Rice Fading Environment. Sensors 2016, 16, 2072. https://doi.org/10.3390/s16122072
Shi C, Salous S, Wang F, Zhou J. Cramer-Rao Lower Bound Evaluation for Linear Frequency Modulation Based Active Radar Networks Operating in a Rice Fading Environment. Sensors. 2016; 16(12):2072. https://doi.org/10.3390/s16122072
Chicago/Turabian StyleShi, Chenguang, Sana Salous, Fei Wang, and Jianjiang Zhou. 2016. "Cramer-Rao Lower Bound Evaluation for Linear Frequency Modulation Based Active Radar Networks Operating in a Rice Fading Environment" Sensors 16, no. 12: 2072. https://doi.org/10.3390/s16122072
APA StyleShi, C., Salous, S., Wang, F., & Zhou, J. (2016). Cramer-Rao Lower Bound Evaluation for Linear Frequency Modulation Based Active Radar Networks Operating in a Rice Fading Environment. Sensors, 16(12), 2072. https://doi.org/10.3390/s16122072