
Performance Evaluation of Target Detection with a Near-Space Vehicle-Borne Radar in Blackout Condition


Abstract
:1. Introduction

- We first review the background of an NSVBR and the existing methods in the performance evaluation of target detection with a radar. The research objectiveness is then explained. These are the main contents in Section 1.
- Section 2 details the target detection problem, the effect of the blackout on radar target detection and the performance evaluation of radar target detection in an NSVBR, serving as the background of this work.
- The majority of our work, Section 3, presents the performance evaluation indexes on the detection capability of an NSVBR. In a blackout situation, both the detection ability and the robustness of the detection process can be considered by these indexes.
- In order to know the performance of this newly-developed methodology, we performed some experiments. Section 4 presented the simulation results and the analysis of them. Based on the experimental results, there is a detailed discussion in Section 5 between our novel approaches and the existing work.
- Section 6 highlights the contribution of this paper and the future work.
2. Problem Formulation and the Background
2.1. Target Detection with a Near-Space Vehicle-Borne Radar
2.2. Effect of the Blackout on Radar Target Detection Performance
2.3. Performance Evaluation of Radar Target Detection
3. The Novel Performance Evaluation Indexes on Detection Capability
3.1. Evaluation Index on Detection Probability
3.2. Evaluation Index on the Robustness of the Detection Process
3.3. Summary of the Proposed Method

4. Results of Validation Experiments
4.1. Experimental Setup
4.2. Performance Evaluation Results for an X-Band Radar and the Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Waveform | NPD-M | NPD-A | RNPD-T | RNPD-A |
|---|---|---|---|---|
| LFM | 0.67 | 0.64 | 0.59 | 0.55 |
| P1 | 0.56 | 0.56 | 0.48 | 0.50 |
| P2 | 0.60 | 0.61 | 0.52 | 0.53 |
| P3 | 0.62 | 0.61 | 0.53 | 0.54 |
| P4 | 0.63 | 0.61 | 0.52 | 0.55 |
| Frank | 0.66 | 0.63 | 0.60 | 0.54 |
4.3. Performance Evaluation Results for a Ku-Band Radar and the Analysis
| Waveform | NPD-M | NPD-A | RNPD-T | RNPD-A |
|---|---|---|---|---|
| LFM | 0.69 | 0.65 | 0.60 | 0.63 |
| P1 | 0.63 | 0.62 | 0.55 | 0.54 |
| P2 | 0.59 | 0.58 | 0.51 | 0.53 |
| P3 | 0.64 | 0.60 | 0.58 | 0.56 |
| P4 | 0.65 | 0.64 | 0.59 | 0.61 |
| Frank | 0.66 | 0.62 | 0.67 | 0.64 |
4.4. Performance Evaluation Results for a Ka-Band Radar and the Analysis
| Waveform | NPD-M | NPD-A | RNPD-T | RNPD-A |
|---|---|---|---|---|
| LFM | 0.72 | 0.69 | 0.61 | 0.66 |
| P1 | 0.59 | 0.60 | 0.52 | 0.56 |
| P2 | 0.64 | 0.65 | 0.56 | 0.59 |
| P3 | 0.64 | 0.67 | 0.62 | 0.65 |
| P4 | 0.65 | 0.66 | 0.59 | 0.58 |
| Frank | 0.69 | 0.64 | 0.68 | 0.70 |

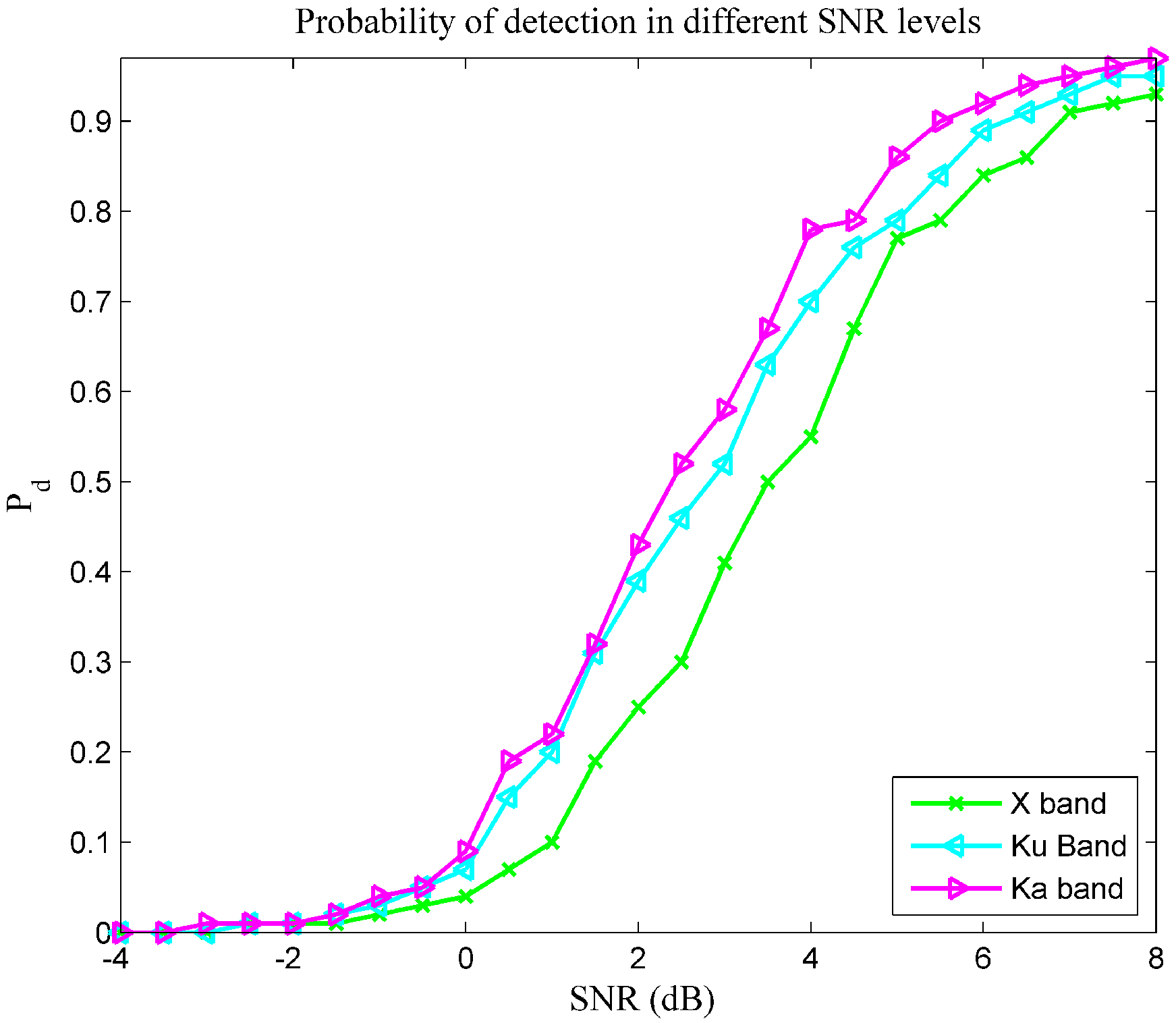
4.5. Experiments of the Overall Performance upon Different Carrier Frequencies
5. Discussion
5.1. Comparison between the Existing Methods and This Work
| Aspect | & | ROC | New Measures |
|---|---|---|---|
| Q1 | |||
| Q11 | ■ | ■ | |
| Q2 | |||
| Q3 | ■ | ||
| Q4 | ■ | ||
| Q5 |
- Q1: Is the methodology applicable to the target detection performance evaluation of an NSVBR and flexible for a complicated scenario (such as, in blackout condition)?
- Q11: Is the methodology flexible for considering multiple performance aspects in blackout condition?
- Q2: The precision of the method.
- Q3: The generalization of the method.
- Q4: Is the method easy to configure?
- Q5: The computational load of the method.
5.2. Comparison between Radars with Different Installations
| Aspect | Spaceborne Radar | NSVBR | Airborne Radar |
|---|---|---|---|
| Basic Functions | SAR imaging | Target search/detect/track, SAR imaging | Target search/detect/track, SAR imaging |
| Range of observation | Some 100 km | Some 50 km | Some 10 km |
| Revisiting time | Some 10 h | Mostly less than 1 h | Mostly some hours |
| Coverage | Some 10,000 km | Some 2500 km | Some 100 km |
| Resolution (SAR) | <1 m to some 10 m | <1 m | <1 m to some 10 m |
| Overfly time | Imposed by orbit | Adjustable | Adjustable |
| Maneuvering ability | Poor | Highly | Moderate |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Richards, M.A.; Scheer, J.A.; Holm, W.A. Principles of Modern Radar: Volume I: Basic Principles; SciTech Publishing: Edison, NJ, USA, 2013. [Google Scholar]
- Melvin, W.L.; Scheer, J.A. Principles of Modern Radar: Volume III, Radar Applications; SciTech Publishing: Edison, NJ, USA, 2013. [Google Scholar]
- Wang, W.Q.; Cai, J.; Peng, Q. Near-Space Microwave Radar Remote Sensing: Potentials and Challenge Analysis. Remote Sens. 2010, 2, 717–739. [Google Scholar] [CrossRef]
- Melvin, W.L.; Scheer, J.A. Principles of Modern Radar: Volume II, Advanced Techniques; SciTech Publishing: Edison, NJ, USA, 2013. [Google Scholar]
- Wang, W.Q. Near-Space Vehicles: Supply a Gap between Satellites and Airplanes for Remote Sensing. IEEE Aerosp. Electron. Syst. Mag. 2011, 26, 4–9. [Google Scholar] [CrossRef]
- Malanowski, M. Detection and parameter estimation of manoeuvring targets with passive bistatic radar. IET Radar Sonar Navig. 2012, 6, 739–745. [Google Scholar] [CrossRef]
- Wang, W.Q. Near-Space Vehicle-Borne SAR With Reflector Antenna for High-Resolution and Wide-Swath Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 338–348. [Google Scholar] [CrossRef]
- Xin, Q.; Wang, Z.; Jiang, Z.; HuangFu, K. A Miniature HRWS SAR Concept for Near-Space Vehicles. In Proceedings of 19th International Radar Symposium, Warsaw, Poland, 23–25 May 2012; pp. 685–688.
- Wang, W.Q. Distributed Passive Radar Sensor Networks with Near-Space Vehicle-Borne Receivers. IET Wirel. Sens. Syst. 2012, 2, 183–190. [Google Scholar] [CrossRef]
- Whelan, D.A.; Filip, A.; Koss, J.J.; Kurien, T.; Pappas, G. Global space-based ground surveillance: Mission utility and performance of Discoverer II. IEEE Aerosp. Conf. Proc. 2000, 5, 1–11. [Google Scholar]
- Galletti, M.; Krieger, G.; Börner, T.; Marquart, N.; Schultz-Stellenfleth, J. Concept Design of a Near-Space Radar for Tsunami Detection. In Proceedings of IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Barcelona, Spain, 23–27 July 2007; pp. 34–37.
- Wang, W.Q.; Jiang, D. Integrated Wireless Sensor Systems via Near-Space and Satellite Platforms: A Review. IEEE Sens. J. 2014, 14, 3903–3914. [Google Scholar] [CrossRef]
- Wang, W.Q.; Peng, Q.; Cai, J. Digital Beamforming for Near-Space Wide-Swath SAR Imaging. In Proceedings of 8th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Kunming, China, 2–5 November 2008; pp. 1270–1273.
- Zheng, P.; Jing, X.; Sun, S.; Huang, H. Range Migration Subaperture Algorithm for spotlight SAR in near space. In Proceedings of 3rd IEEE International Conference on Network Infrastructure and Digital Content (IC-NIDC), Beijing, China, 21–23 September 2012; pp. 562–566.
- Liu, J. Ideas on Development of Ka Band Tracking, Telemetry, Command and Communication System. J. Astronaut. 2008, 29, 1685–1688. (In Chinese) [Google Scholar]
- Zou, F. TDRS Based Navigation System for Flight Vehicles in Near Space. In Proceedings of IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–4.
- Zou, F. A New Navigation System for Flight Vehicles in Near Space. In Proceedings of International Conference on Electronics, Communications and Control (ICECC), Xi’an, China, 14–16 September 2011; pp. 71–74.
- Zhang, J.; Wang, S.; Wang, F.; Feng, J.; Huang, F. Target Location and Accuracy Analysis in Near Space Bistatic Radar. Proc. Int. Conf. Mater. Eng. Mech. Eng. 2012, 69, 55–60. [Google Scholar] [CrossRef]
- Li, Y.P.; Li, X.; Wang, H.Q.; Chen, Y.P.; Zhuang, Z.W.; Cheng, Y.Q.; Deng, B.; Wang, L.D.; Zeng, Y.H.; Gao, L. A Compact Methodology to Understand, Evaluate, and Predict the Performance of Automatic Target Recognition. Sensors 2014, 14, 11308–11350. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.P.; Li, X.; Wang, H.Q. Target Tracking in Collaborative Sensor Network. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2694–2714. [Google Scholar] [CrossRef]
- Li, Y.P.; Li, X.; Deng, B.; Wang, H.Q.; Qin, Y.L. A Cognition-Based Method to Ease the Computational Load for an Extended Kalman Filter. Sensors 2014, 14, 23067–23094. [Google Scholar] [CrossRef] [PubMed]
- Bhat, S.S.; Narayanan, R.M.; Rangaswamy, M. Design, Performance and Optimization for Multimodal Radar Operation. Sensors 2012, 12, 12673–12693. [Google Scholar] [CrossRef]
- Molina, I.; Martinez, E.; Arquero, A.; Pajares, G.; Sanchez, J. Evaluation of a Change Detection Methodology by Means of Binary Thresholding Algorithms and Informational Fusion Processes. Sensors 2012, 12, 3528–3561. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vaaja, M.; Kukko, A.; Kaartinen, H.; Kurkela, M.; Kasvi, E.; Flener, C.; Hyyppä, H.; Hyyppä, J.; Järvelä, J.; Alho, P. Data Processing and Quality Evaluation of a Boat-Based Mobile Laser Scanning System. Sensors 2013, 13, 12497–12515. [Google Scholar] [CrossRef] [PubMed]
- Gao, G.; Shi, G.T.; Yang, L.; Zhou, S.L. Moving Target Detection Based on the Spreading Characteristics of SAR Interferograms in the Magnitude-Phase Plane. Remote Sens. 2015, 7, 1836–1854. [Google Scholar] [CrossRef]
- Lacomme, P.; Hardange, J.P.; Marchais, J.C.; Normant, E. Air and Spaceborne Radar Systems: An Introduction; SciTech Publishing: Edison, NJ, USA, 2001. (In French) [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, X.; Wang, H.; Deng, B.; Qin, Y. Performance Evaluation of Target Detection with a Near-Space Vehicle-Borne Radar in Blackout Condition. Sensors 2016, 16, 64. https://doi.org/10.3390/s16010064
Li Y, Li X, Wang H, Deng B, Qin Y. Performance Evaluation of Target Detection with a Near-Space Vehicle-Borne Radar in Blackout Condition. Sensors. 2016; 16(1):64. https://doi.org/10.3390/s16010064
Chicago/Turabian StyleLi, Yanpeng, Xiang Li, Hongqiang Wang, Bin Deng, and Yuliang Qin. 2016. "Performance Evaluation of Target Detection with a Near-Space Vehicle-Borne Radar in Blackout Condition" Sensors 16, no. 1: 64. https://doi.org/10.3390/s16010064
APA StyleLi, Y., Li, X., Wang, H., Deng, B., & Qin, Y. (2016). Performance Evaluation of Target Detection with a Near-Space Vehicle-Borne Radar in Blackout Condition. Sensors, 16(1), 64. https://doi.org/10.3390/s16010064