1. Introduction
An AUV (autonomous underwater vehicle) is applied to execute all kinds of underwater tasks, including ocean exploration, underwater mine clearance and collecting bathymetry data of ocean and rivers [
1,
2,
3,
4]. In order to guarantee that underwater tasks will be completed smoothly and accurate underwater measurement data will be acquired, the AUV is required to have long-term autonomous high-precision positioning and navigation abilities and invisibility [
5]. In an underwater environment, electromagnetic wave signals have the characteristic of serious attenuation. In deep sea or under an ice surface, adopting GPS and other radio positioning means cannot achieve ideal positioning effects. In order to meet the navigation requirements, DVL (Doppler velocity log) and SINS (strapdown inertial navigation system) are often used to integrate navigation [
6], and the position will be estimated by dead reckoning. However, when this means is used for positioning, positioning errors will accumulate as time goes on [
7]. When the AUV is performing tasks in shallow sea, it can adopt the navigation mode of “submerge, water surface calibration, submerge” to launch positioning and navigation; in other words, the AUV relies on SINS/DVL to launch positioning and navigation when navigating under water. After the AUV has been submerged under water for a certain time, in order to calibrate the accumulative errors, the AUV must emerge from the water, and the SINS/GPS integrated navigation system must be used to do the calibration [
8]. Adopting this scheme can reach the goal of calibrating accumulative errors, but the AUV must be required to travel to and fro between the underwater operation position and the water surface, which will not only influence the working efficiency and increase the energy consumption, but also expose the position of the AUV. Especially when the AUV is operating in deep sea or under an ice surface, this scheme will be more impractical. Hence, it is very important to study a method in which reliable assistance positioning can be conducted for a long time underwater. This paper suggests an interactive assistance positioning method that integrates an LBL (long base line) underwater acoustic positioning system and an SINS/DVL/MCP (magnetic compass pilot) integrated navigation system, and this is a new idea for solving the above problems.
An LBL underwater acoustic positioning system, usually consisting of a seabed transponder matrix and an interrogation responder with a base length of hundreds to thousands of meters [
9,
10], adopts distance information between the underwater objective and the seabed matrix element to solve the target position. It can provide accurate positioning of an underwater vehicle within a local area without accumulative errors. Hence, an LBL underwater acoustic positioning system is very applicable to an underwater AUV to launch assistance positioning. Among some of the research of predecessors, Liu, Y. puts forward an underwater AUV positioning and navigation algorithm, which adopts an LBL underwater acoustic positioning system, an ADCP (acoustic Doppler current profiler) and depthometer-assisting INS [
11]. Miller, P.A.
et al. puts forward a tight integrated system based on LBL/DVL/INS [
3]. Cheng,W.H. proposes a modification method, which is based on the periodically-measured actual navigation distance and is associated with the TOA positioning algorithm [
12]. Jakuba, M.V.
et al. report results for LBL acoustic navigation during autonomous under-ice surveys near the seafloor and adaptation of the LBL concept for several typical operational situations, including navigation in proximity to the ship during vehicle recoveries [
13]. Eustice, R.M.
et al. report recent experimental results in the development and deployment of a synchronous-clock acoustic navigation system suitable for the simultaneous navigation of multiple underwater vehicles [
14]. Chen, Y.M.
et al. propose a near-real-time approach to underwater inertial navigation with LBL, which uses a ping-response protocol, resulting in asynchronous measurements [
15]. Although these systems have reached a certain positioning effect, there are some deficiencies. Firstly, these systems do not explain how to solve the positioning difficulty brought by the multi-path transmission of the underwater acoustic signal. In addition, acoustic velocity is distributed unevenly with the change of underwater depth, and sound ray transmission is curved, which will result in big positioning errors; additionally, the above systems have not proposed any solution.
When solving the target position, the LBL underwater acoustic positioning system can adopt the TOA (time of arrival) positioning algorithm and the TDOA (time difference of arrival) positioning algorithm. The equation set formulated by the TOA positioning algorithm can be directly transformed into a simple linear system of equations with a simple solution. However, strict time synchronization between the hydrophones and the sound source is required to measure a relatively accurate TOA value. It is very hard to do so in reality. The TDOA positioning algorithm acquires the TDOA value by conducting a generalized cross-correlation calculation of the signal received from one hydrophone and another, and then makes the positioning calculation. This method does not have to assure synchronization of the sound source and hydrophones, and the communication between them is quite simple. Hence, it is often adopted in wireless positioning. As acoustic signals will finally be in a coherence stack at one hydrophone through different paths, there will be multiple correlation peaks with approximate amplitudes in the generalized cross-correlation results, thus forming a phenomenon of ambiguous correlation peaks. Then, An, L.
et al. came up with an ambiguity-solving algorithm based on underwater acoustic propagation characteristics [
16]. This method, by studying the distribution rule of cross-correlation peaks forming the multipath transmission of underwater signal channels, tracks stable correlation peaks, which can effectively correct the miscalculation of the TDOA value caused by the ambiguity of the correlation peaks. However, under the condition that distances between fake peaks and the main peak do not differ that much, it is still very hard to accurately track, and the tracking error will be enlarged and finally diverge. In addition, underwater acoustic propagation channels will change as the underwater environment changes, so will the distribution rule of correlation peaks: if the former tracking strategy is still adopted, there will also be errors. Hence, the adaption of this tracking algorithm is not that strong.
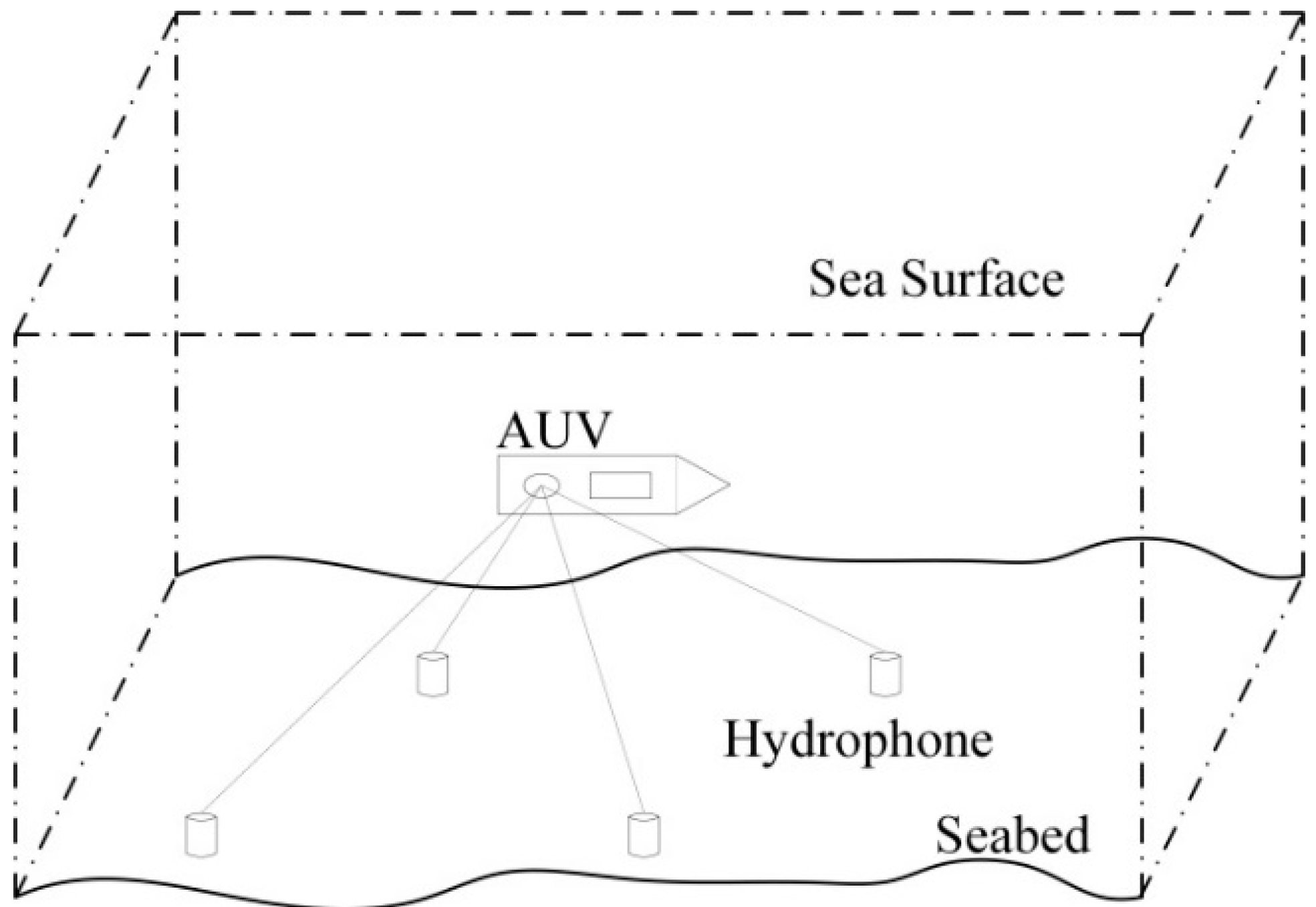
In this paper, we propose an underwater positioning method based on the interactive assistance of LBL/SINS/DVL for an AUV. This positioning system consists of SINS, DVL and a sound source installed on the AUV and an LBL underwater matrix located at the seabed. The hydrophones of LBL receive signals from the sound source and conduct cross-correlation calculation and acquire the TDOA value. We adopt the hyperbolic model to solve the position of the sound source (namely, the position of the AUV), correct accumulative errors of SINS/DVL, use resolving results of SINS/DVL to assist in solving ambiguous correlation peaks when LBL is launching underwater acoustic positioning, estimate the TDOA value and improve the solution accuracy of LBL positioning. This scheme can not only directly correct accumulative errors caused by the dead reckoning algorithm, but also solves the problem of ambiguous correlation peaks caused by multipath transmission of underwater acoustic signals. Therefore, it is quite applicable to underwater positioning and navigation of an AUV.
The structure of this paper is as follows: Firstly, we introduce the principle and structure of the underwater assistance positioning system and then introduce key technologies of the system, such as underwater acoustic propagation channel modeling, the calculation of time delay differences, the Taylor series expansion algorithm, the TDOA position solution method and the interactive assistance algorithm. Finally, we verify the effectiveness of the algorithm through a simulation experiment.
3. Principle of the Interactive Assistance Positioning Algorithm of SINS/DVL/MCP/LBL
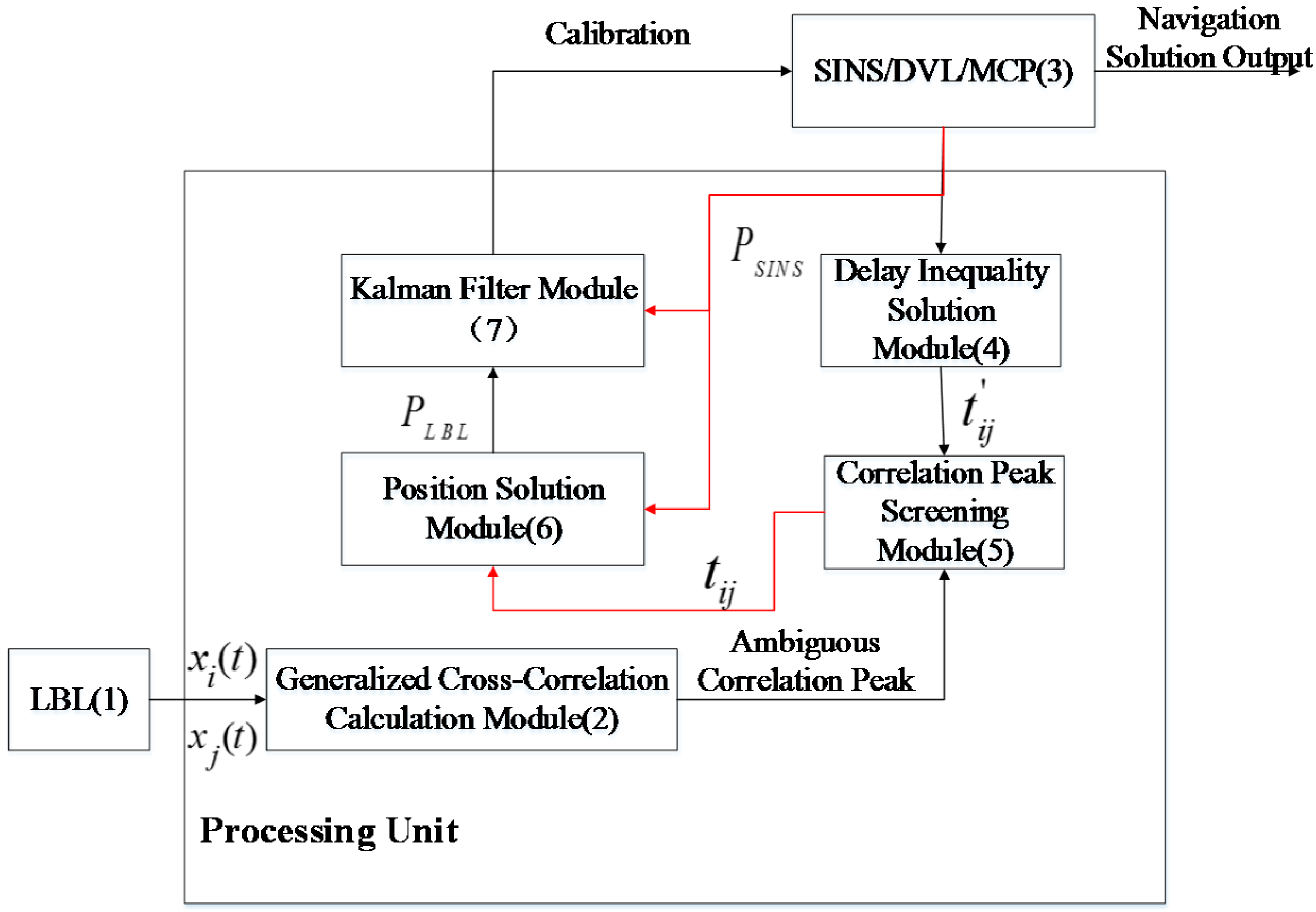
This section introduces the realization principles of the algorithms in
Figure 4, including generalized cross-correlation calculation of hydrophone receiving signals; SINS assists in seeking the ideal time differences and AUV position calculation based on TDOA.
3.1. Generalized Cross-Correlation Calculation of Hydrophone Receiving Signals
x(
t) represents the sound source signal; suppose that the signal received by No.
i hydrophone is:
The signal received by No.
j hydrophone is:
and are attenuation coefficients of sound signals propagating underwater; and are non-correlative noise signals; and are propagation time.
The ross-correlation function of
and
is:
represents TDOA; is observation time. According to the characteristics of the correlation function, if the peak value of is found, then the corresponding is the right time difference.
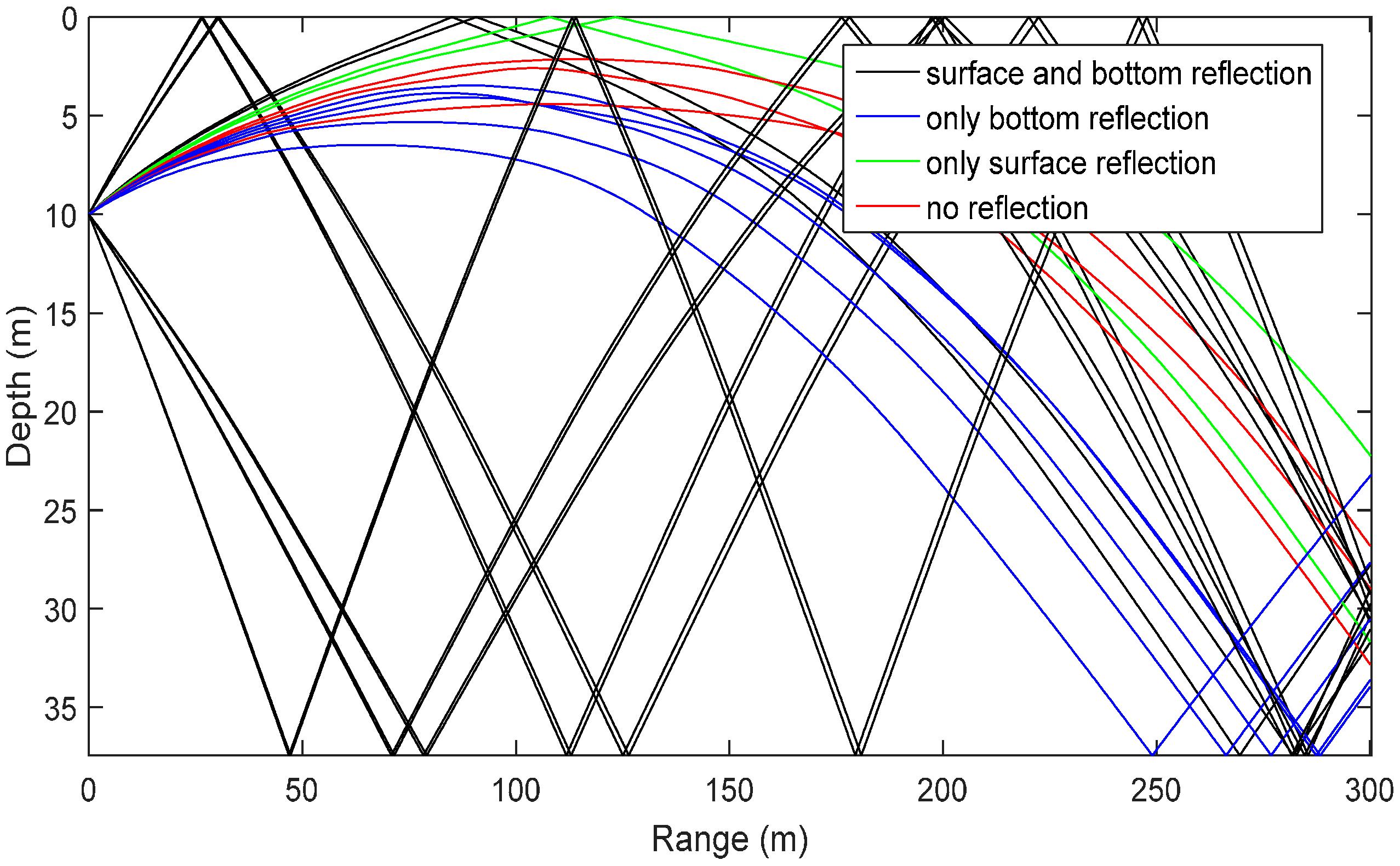
3.2. Multi-Path Effect of Sound Signals Underwater
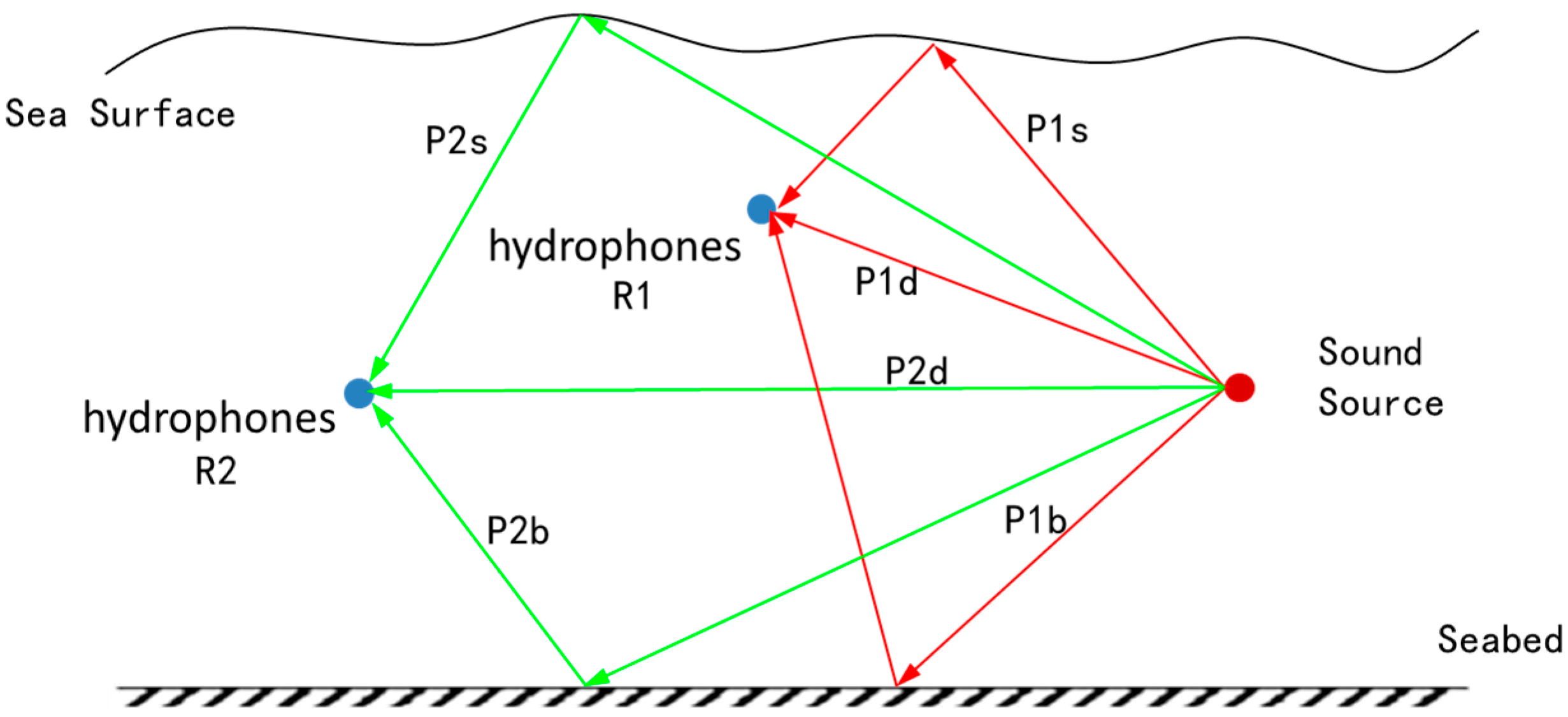
Figure 5 is a simplified multi-path underwater sound propagation model. Place a sound source and two hydrophones R1 and R2; simply consider nonstop path (P
id,
i=1,2), sea surface reflection path (P
is,
i=1,2) and seabed reflection path (P
ib,
i=1,2); set the sound source signal as
x(
t); then, the reception model of the hydrophone is as shown in Equation (6):
Figure 5.
Simplified model of the underwater multi-path effect.
Figure 5.
Simplified model of the underwater multi-path effect.
,
and
are respectively attenuation coefficients of P
id path, P
is path and P
ib path (
i = 1,2).
,
and
are respectively the propagation time of P
id path, P
is path and P
ib path. Suppose that sound source signal
is irrelevant to noise
and noise
and that
is irrelevant to noise
, then the cross-correlation function of
and
is as shown in Equation (7).
is a self-correlation function of
. It can be seen from Equation (7) that: peak values of the cross-correlation functions of
and
occur respectively on nine time delay of arrival points, such as
,
and
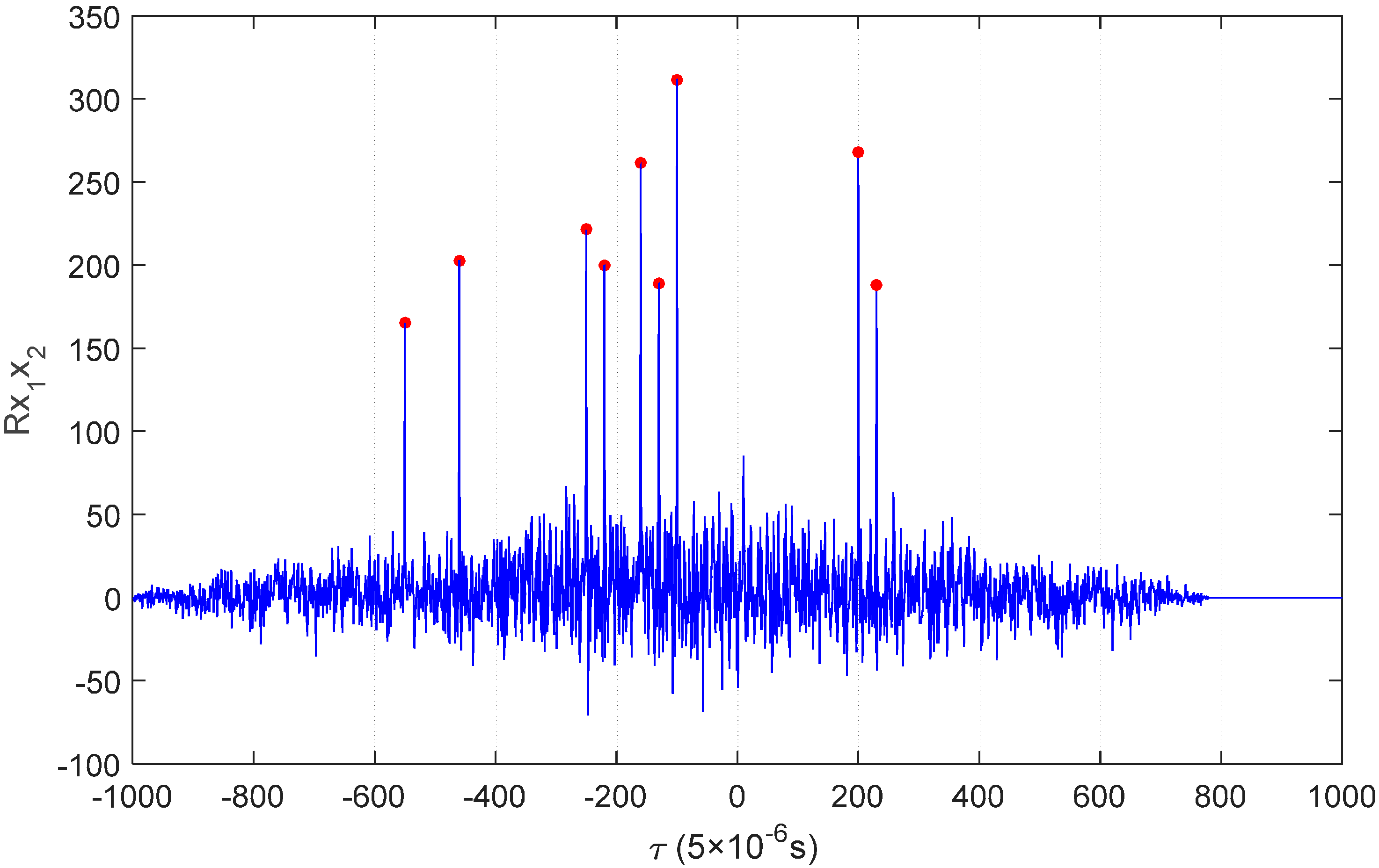
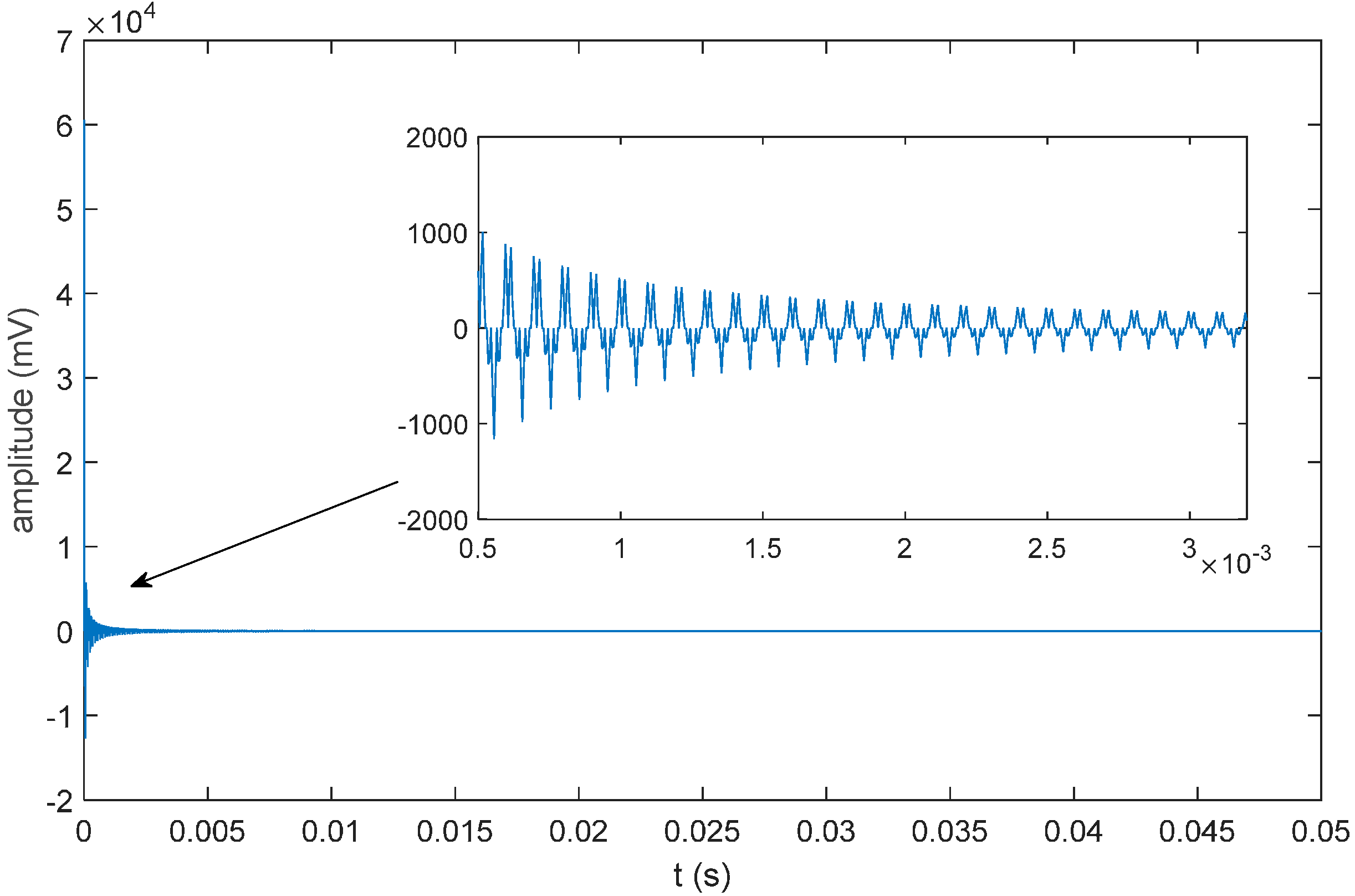
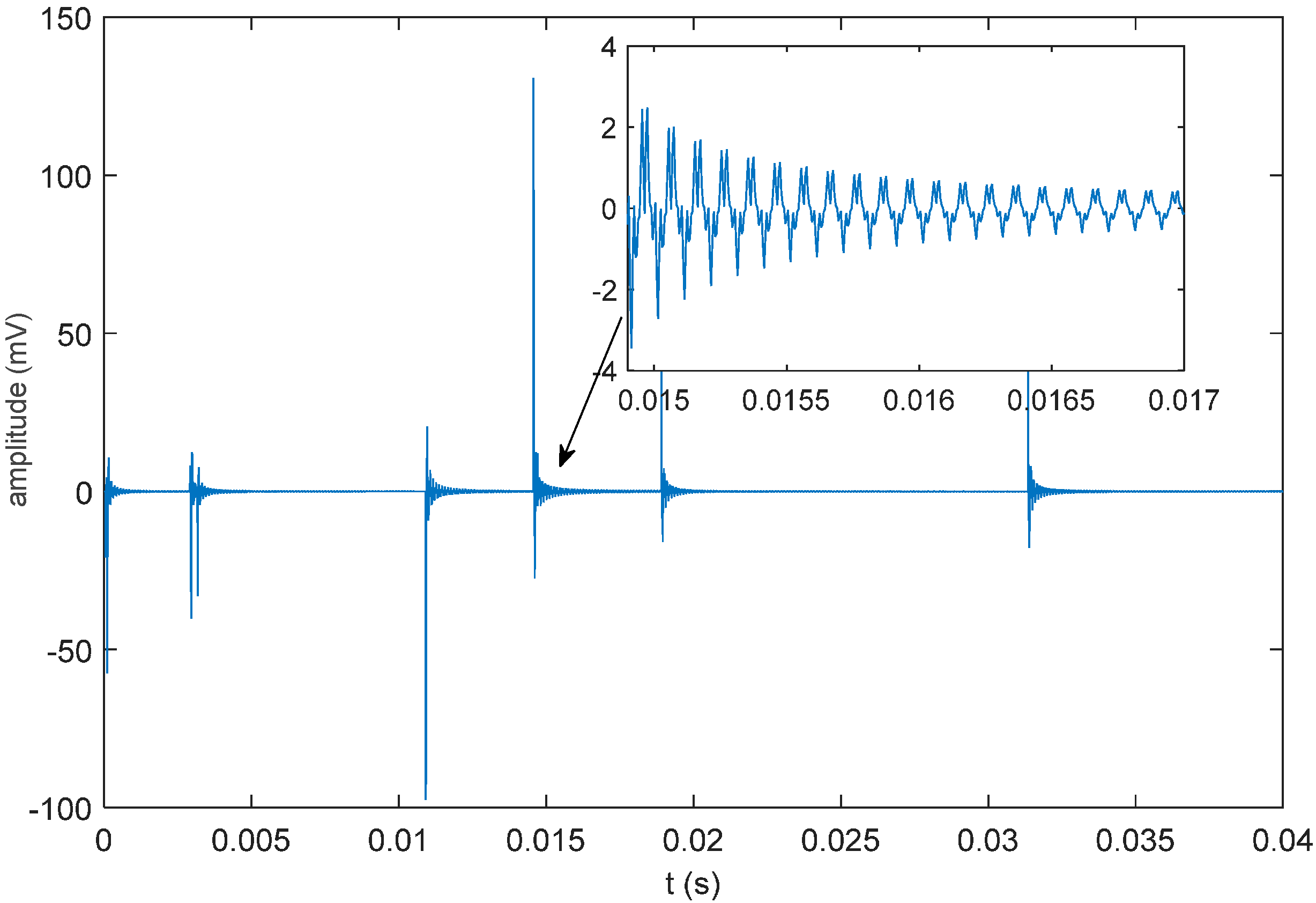
(nine peak values will occur when the nine points are unequal; if an equality situation among nine points exists, then there will be an overlapping phenomenon, and the number of peak values will reduce); the peak value will be decided by the corresponding attenuation coefficient. The specific effect is as shown in
Figure 6. Under a practical situation, we only need to calculate the time difference of arrival of a nonstop path (main peak), so other peak values will interfere with confirming the main peak, which makes it impossible to accurately estimate the TDOA of signals.
Figure 6.
Ambiguity phenomenon of correlation peaks.
Figure 6.
Ambiguity phenomenon of correlation peaks.
3.3. SINS/DVL Assistance in Seeking the Ideal Delay Inequality
Because of the multi-path effect, multiple correlation peaks will appear in the cross-correlation function, and these peaks differ a little in value; it is very difficult to judge which one corresponds to the most ideal time difference. In multi-path time delay estimation, the methods that can be adopted are usually the self-adaptation method, the generalized cross-correlation method, the auto-correlation method, the cepstrum method,
etc. Although the self-adaptation method is of high estimation accuracy and a strong resolution ratio, its search scope is quite broad, which makes it hard to guarantee convergence and results in a large calculated quantity and poor instantaneity; besides, it has a certain requirement for the signal-to-noise ratio. The generalized cross-correlation method is of simple calculation, but the main correlation peak is not obvious; and there are certain deficiencies in its performance. Resolution ratios of the auto-correlation method and the cepstrum method are used for calculating the time delay, as they need a relatively larger signal bandwidth [
17,
18,
19,
20]. This paper opens up a new path by putting forward a method that selects the main correlation peak based on SINS/DVL positioning assistance after combining the advantages and disadvantages of the generalized cross-correlation method. This algorithm is simple and easy to realize; besides, it can estimate the time differences of multiple paths. Even with a low signal-to-noise ratio, it can effectively do the estimation; in the meantime, it can solve the problem of selecting the main correlation peak with high accuracy when correlation peaks are ambiguous. Now, the principle of the algorithm will be introduced in detail:
In the LBL underwater acoustics positioning system, set the position of No.
i hydrophone as
and the AUV position output by the SINS integrated system at time
k as
; adopt
to calculate the distance between the hydrophone and AUV at time k as:
The distance difference between two random hydrophones i and j and the AUV at time
k is:
Then, the calculation of the time difference of the two hydrophones receiving signals is:
is the equivalent sound velocity of signals corresponding to time difference at time k.
As at time k − 1, the surrounding environment of the AUV is not changed that much at time k, the change of the sound ray structure is little. Hence, the equivalent sound velocity of the last time cycle can be used as the current equivalent acoustic velocity; in other words, the velocity can be acquired by using the distance difference between hydrophones i and j and the sound source at time k − 1 to divide the time difference. The specific calculation is as follows:
At time
k − 1, the corrected position of AUV by LBL is
, and the distance of hydrophone
i and the sound source is:
The distance difference between hydrophones i and j and the sound source is:
If the time difference of hydrophones
i and
j (which have been screened out) receiving the signal at time
is
, then the current equivalent acoustic velocity is:
Substitute the computed results of Equations (9) and (13) into Equation (10), and time difference can be calculated. Seek the peak value that is the most proximate to among a group of ambiguous correlation peaks in Equation (7), and take the time difference corresponding to this peak value as the more accurate time difference .
3.4. TDOA Three-Dimensional Positioning Algorithm Based on SINS/DVL Assistance
Three-Dimensional Positioning Algorithm Base on Taylor Series Expansion
For the moment, there are many algorithms that use TDOA measured to perform positioning, such as Chan’s algorithm, the Taylor algorithm, the Friedlander algorithm,
etc. Chan’s algorithm has strict requirements for the measurement accuracy of the time difference and is more applicable to a line-of-sight transmission channel environment. Under a non-line-of-sight transmission condition, as for the measurement errors of the time difference of the signal arrival, the positioning errors of the algorithm will be large and will be easily influenced by the effects of reflection, scattering and refraction. What the Friedlander algorithm acquires is only the second-best solution. The Taylor algorithm has no special requirements for the statistic property of measuring errors or
a priori information, and it can provide a higher positioning degree on a certain Gaussian noise level. However, this algorithm is an iterative one without a final expression solution, and algorithmic convergence needs to be guaranteed by an initial position that is not far from the actual position [
21,
22]. Hence, this paper suggests the TDOA positioning algorithm based on SINS/DVL assistance, and the algorithm takes the positioning results of SINS/DVL as the iterative initial value of the Taylor algorithm, which not only guarantees algorithmic convergence, but also reduces the iterations. It is very applicable to underwater positioning.
This algorithm will be introduced in detail as follows:
Suppose that there are
n hydrophones in the matrix, then formulate (
n – 1) equations according to the hyperbolic positioning model:
is the function of
;
represents the position of the AUV;
represents the position of No.
i hydrophone; then, it can be expressed as
; set it as the objective function. Suppose that the measured value of objective function
(namely
) is
, and the actual value is
,
,
is the measuring error. Adopt initial value
, and they meet
,
,
; then, expand objective function
in
according to the Taylor series as the following Equation (15):
Ignore high-order terms above the quadratic term in the expanded section, then the above equation can be expressed as:
It can be acquired according to the hyperbolic positioning model that:
Expand Equation (17) according to Equation (16) and acquire:
where:
Set
, then:
and then:
For the n matrix elements, there will be:
where:
Take
as an unknown variable; suppose that
is the covariance matrix of
; then adopt the method of weighing least squares estimation; it can be acquired that:
The calculation process of the Taylor algorithm can be concluded as follows:
- (1)
Select an initial value ;
- (2)
Substitute into Equations (20) and (28) to calculate G and ;
- (3)
Substitute , and into Equation (27) to calculate ;
- (4)
Substitute
,
and
into Equation (30) and update
; if
,
is a very small threshold value, then the iteration ends;
is the final positioning result. Otherwise, update
according to Equation (31), and repeat
until the above conditions are met.
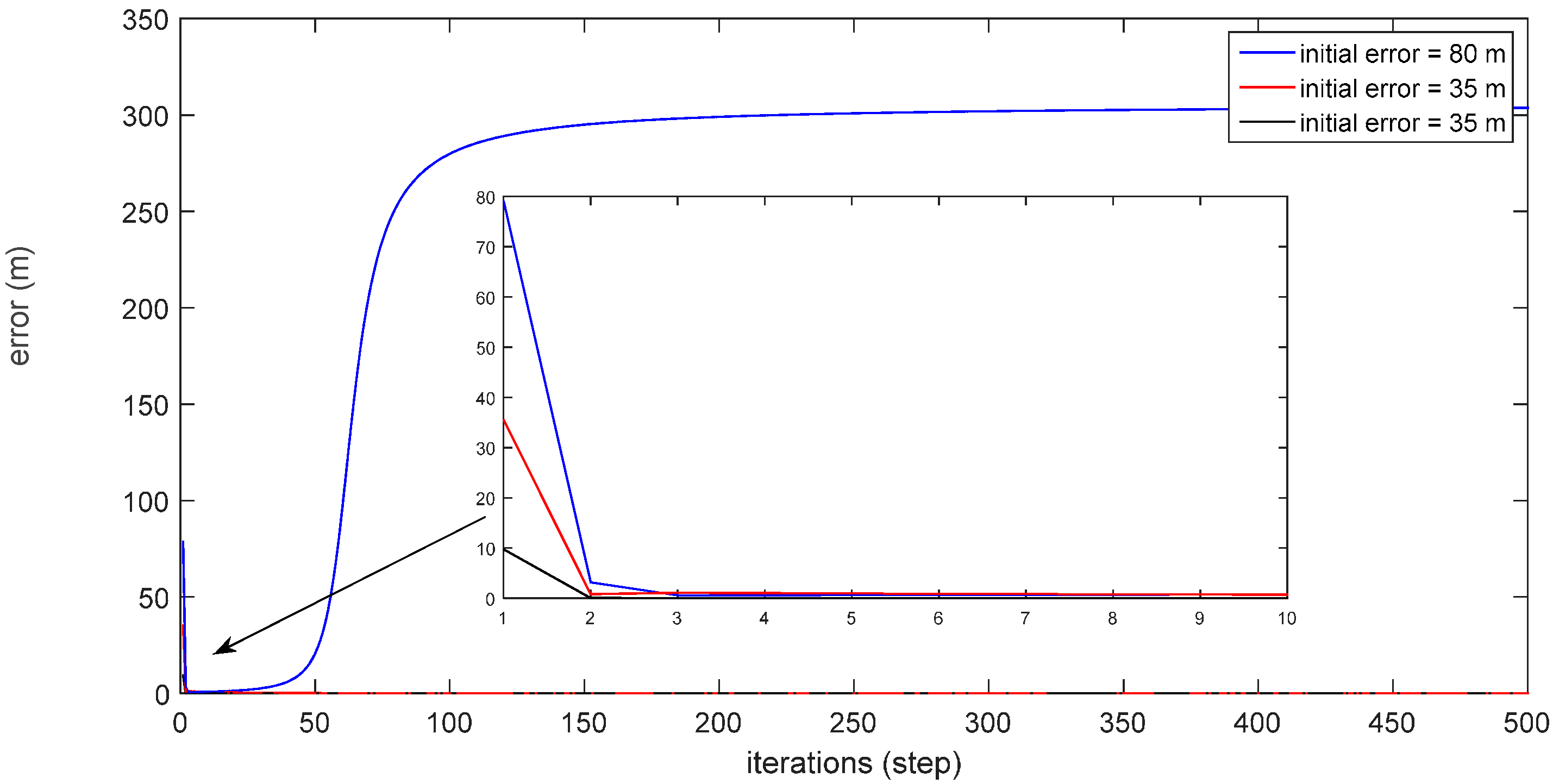
The algorithm needs an estimated position value as an initial value to make iterations. The accuracy of the initial position value has great influence on the convergence of the algorithm. As shown in
Figure 7, the convergence error threshold for the iterative algorithm is 10
−7 m. When the initial position error is 80 m, the iterative result cannot converge. When the initial position error is 35 m, the iterative result converges, but the number of iterations is 468 steps. While the initial position error is set as 10 m, the number of iterations requires only 364 steps. Thus, the higher the accuracy of the initial position value, the faster the convergence rate. This paper selects the output position
PSINS of SINS/DVL as the initial position value of the iteration, which can not only satisfy the convergence of the algorithm, but also greatly reduce the iteration steps.
Figure 7.
The iteration results with different initial position values.
Figure 7.
The iteration results with different initial position values.
3.5. SINS/DVL/MCP/LBL Integrated System Modeling
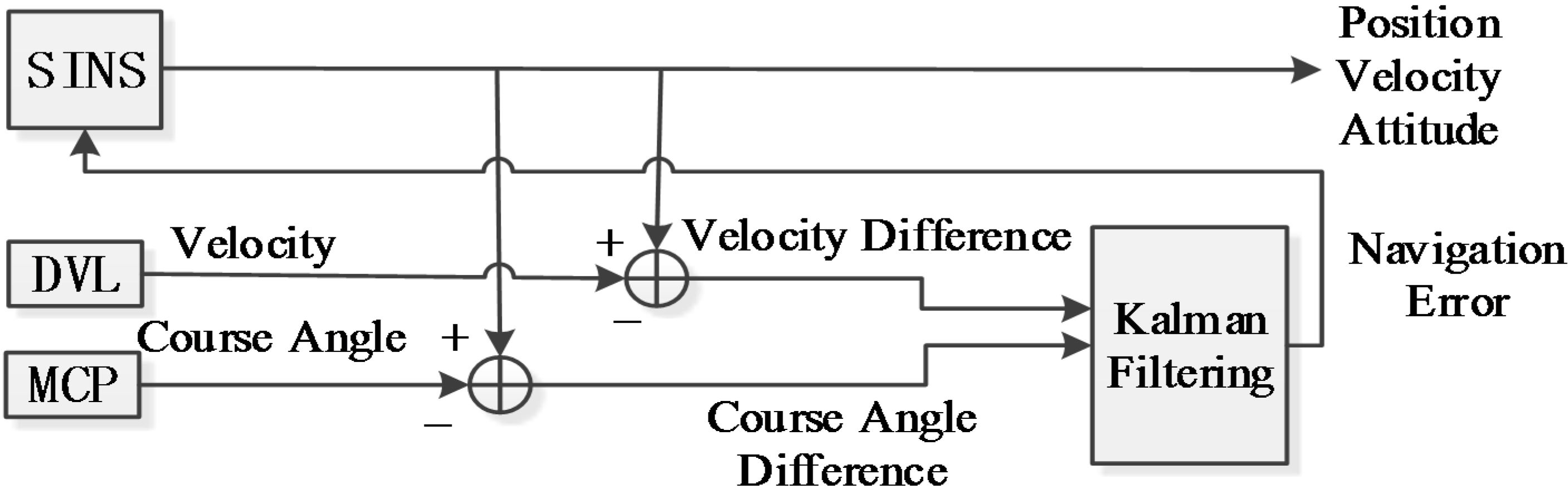
When the AUV does not enter the effective signal scope of LBL, adopt the SINS/DVL/MCP integrated navigation system as shown in
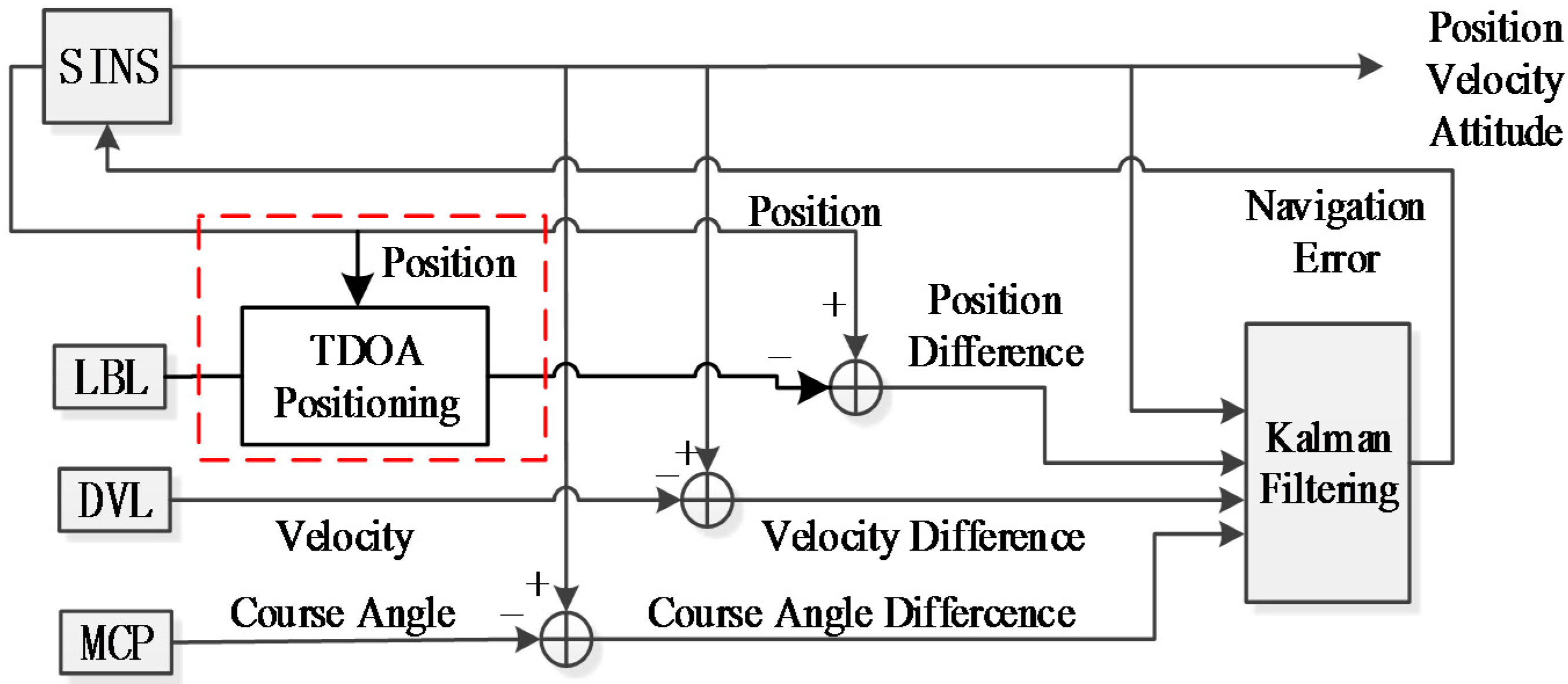
Figure 8 to perform the navigation and positioning. When the AUV enters the effective signal scope of LBL, adopt the SINS/DVL/MCP/LBL integrated navigation system as shown in
Figure 9 to perform the navigation and positioning.
Figure 8.
SINS/DVL/MCP integrated navigation system.
Figure 8.
SINS/DVL/MCP integrated navigation system.
Figure 9.
SINS/DVL/MCP/LBL integrated navigation system.
Figure 9.
SINS/DVL/MCP/LBL integrated navigation system.
The state equation of the integrated system is:
where
X is the state variable,
F is the state-transition matrix,
G is the transition matrix of the process noise and
W is systematic noise.
Select the velocity error, attitude error, accelerometer zero offset and gyroscopic drift as state vector
X:
are respectively the velocity errors of the directions of east, north and the local vertical(up). are respectively the misalignment angles of the directions of east, north and the local vertical(up). are respectively the errors of latitude, longitude and altitude. are respectively biased errors of the three axial directions of the accelerator. are respectively the drifts of the three axial directions of the gyroscopes. F can be confirmed by the SINS error equation.
The measuring equation of the integrated system is:
Z is the observation vector;
is the position information output of the SINS system;
is the position information output by the LBL system;
is the velocity information output by the SINS system;
is the velocity information output by the DVL system;
is the heading information output by the SINS system;
is the heading information output by the MCP system;
V is the observation noise vector; and
H is the measurement matrix, which satisfies:
5. Conclusions
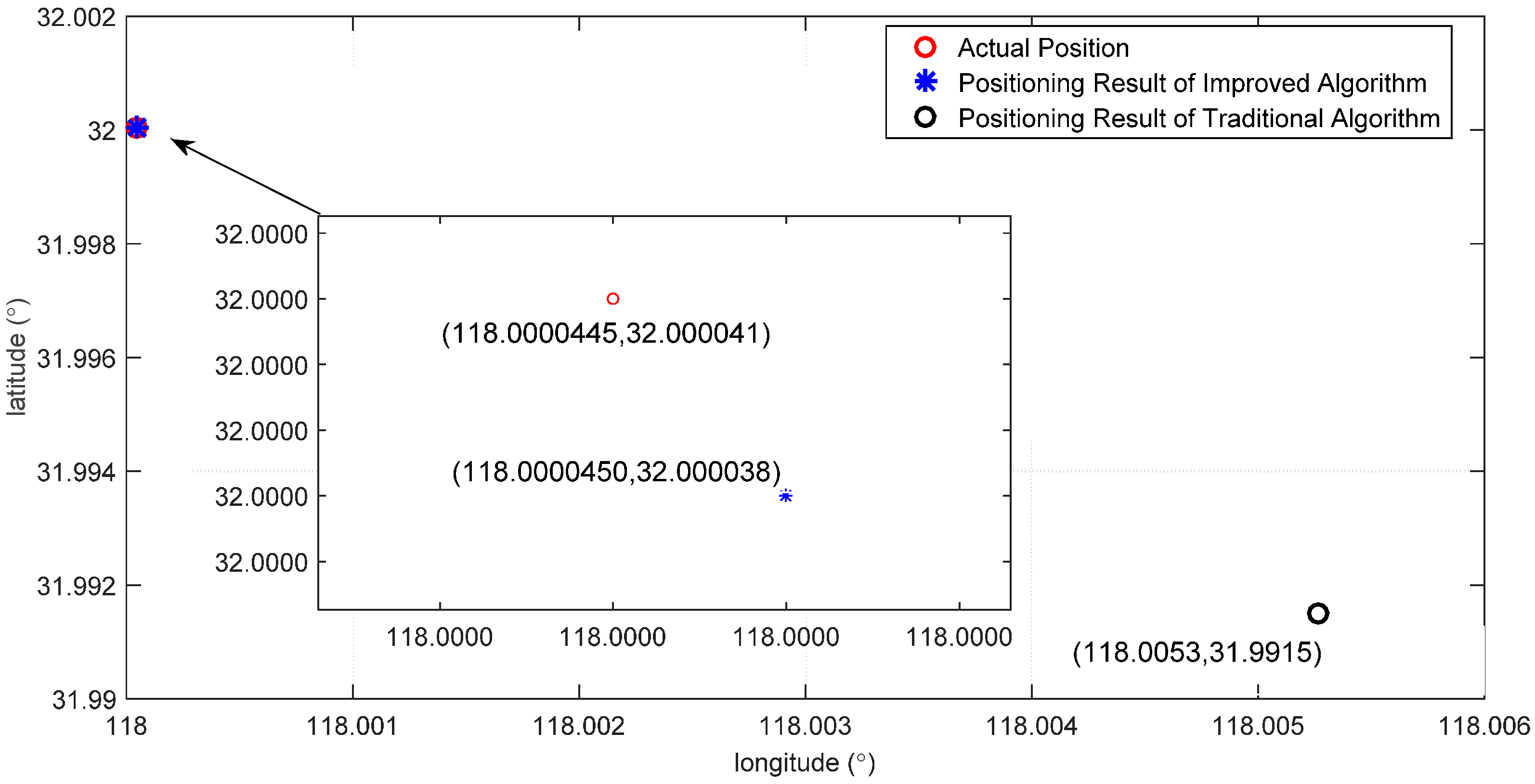
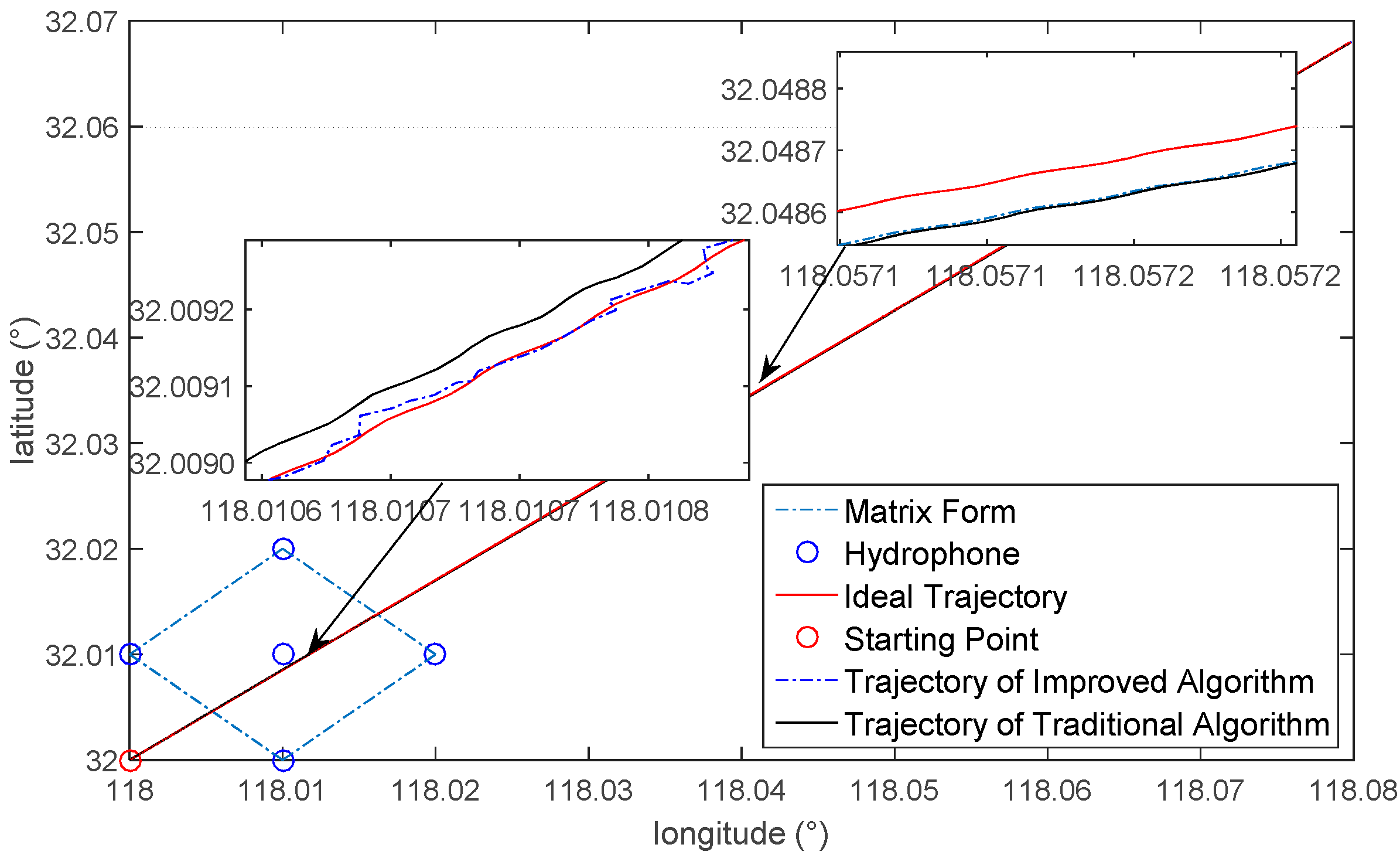
This paper, directed at deficiencies in existing underwater positioning technology, proposes an underwater positioning system based on the mutual assistance of SINS/DVL/MCP and LBL. The whole system consists of an SINS/DVL/MCP integrated navigation system and an LBL underwater acoustic positioning system. The latter adopts the TDOA positioning algorithm based on Taylor series expansion, as well as the positioning results provided by the SINS/DVL/MCP integrated navigation system, which will assist in calculating the delay inequality and distance difference. In the meantime, the positioning results will also be used as the iterative initial value of the positioning algorithm. The final positioning results will be used to calibrate the accumulative errors of the position of the SINS/DVL/MCP integrated navigation system.
The final simulation results show that: compared to the traditional algorithm, this scheme can not only directly correct accumulative errors caused by the dead reckoning algorithm, but also solves the problem of ambiguous correlation peaks caused by the multipath transmission of underwater acoustic signals. This algorithm can greatly improve the AUV underwater positioning accuracy. Only when the AUV installed with the SINS/DVL integrated navigation system approaches the scope of the hydrophones can accumulative errors be effectively calibrated. Hence, it has strong practicability.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}