3.1. Mutual Coupling Circumvention
Referring to [
9,
10,
11], we know that the middle subarray, defined as the middle
elements, is insensitive to mutual coupling, and its actual steering vector is equivalent to an ideal one (
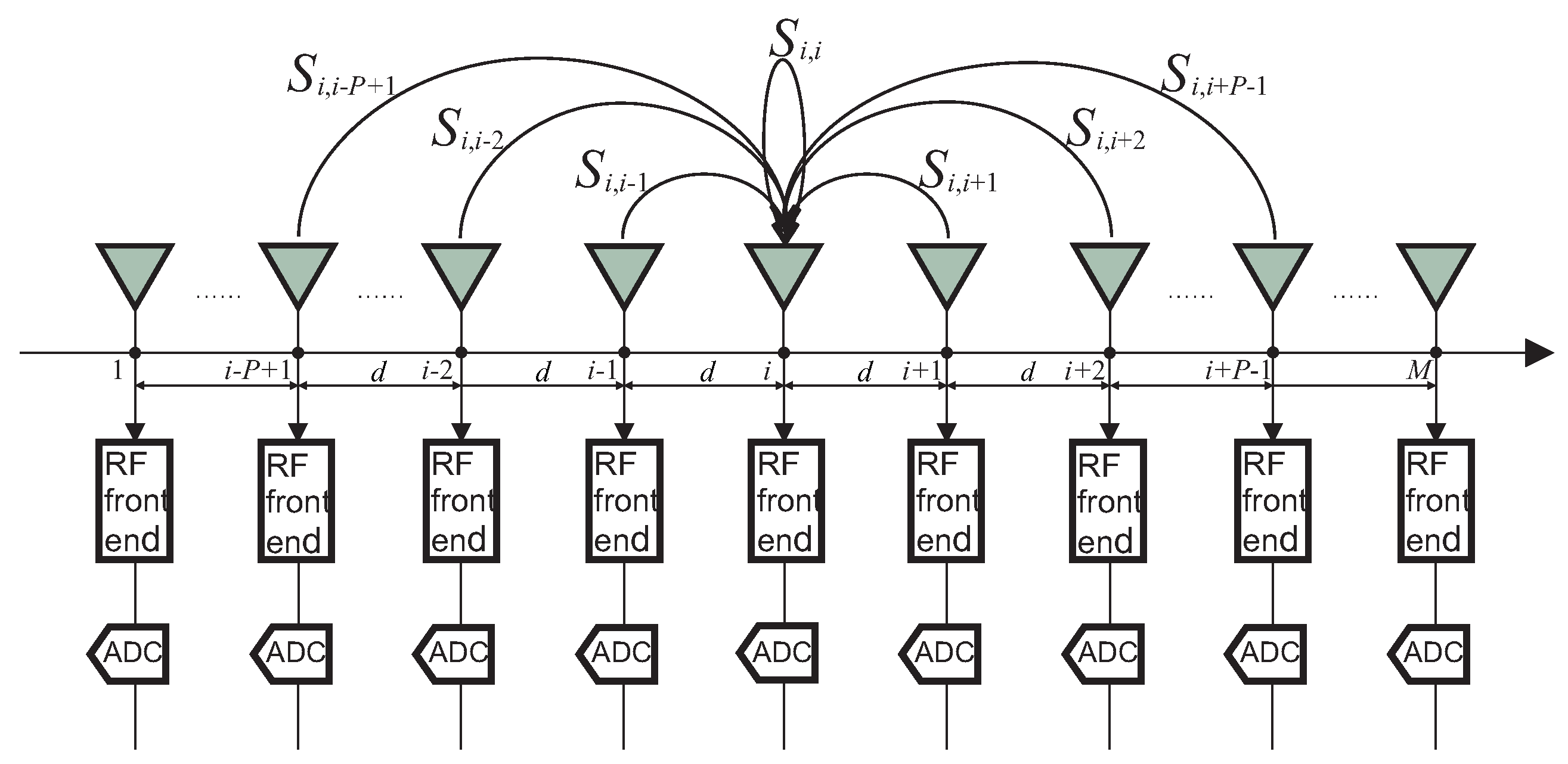
i.e., no coupling effect) scaled by a scalar. In order to combat signal coherency as well as effect of unknown mutual coupling in the ULA, we only make use of the output of the middle subarray by virtue of their steering vector. All other elements are defined to belong to auxiliary subarrays as shown in
Figure 2. Inspired by [
9], a selection matrix
J is defined as
and the covariance matrix of the the middle subarray is then given by
where
Figure 2.
Allocation of the middle subarray and auxiliary subarray.
Figure 2.
Allocation of the middle subarray and auxiliary subarray.
According to the selected MCM and signal models above, one has the following parameterisation for joint estimation of MCM and DOAs:
with
,
, and
. It should be noted that generally
in Equation (8) is assumed to be nonzero. Hence, the covariance matrix of the middle array in Equation (6) can be rewritten as
where
,
, and
is still a
block diagonal matrix. This indicates that the middle subarray, which involves
sensors, is insensitive to mutual coupling but is still affected by signal coherency.
3.2. DOA Estimation of Coherent Signals
In this section, we will propose a rank restoration algorithm using an improved matrix reconstruction technique for DOA estimation of coherent signals in the presence of unknown mutual coupling.
Here a new matrix from the
i-th row of
is constructed as
where
. From Equations (1) and (9), the received signal
at the
i-th element of the middle array is
where
and
are the white Gaussian noise at the
i-th sensor.
Then, the
-th entry of
can be expressed as
where
is the Kronecker delta. Substituting Equation (12) into the matrix in Equation (10) allows
to be written as
where
,
,
,
,
with
,
, and their entries are defined as
,
, respectively.
It is known that the effect of having only a finite number of snapshots, especially when the number is small, may cause biased estimates of subspaces. To further restore the rank and make the matrix reconstruction method more robust against the effects of noise and finite snapshots, all the
rows of
are then exploited to construct the following square matrix
It can be readily verified that
where
Defining , then .
Next we examine whether the rank of
has been restored sufficiently to resolve all
N incident coherent signals.
Proposition 1. When and , for K groups of coherent signals, where .
Proof: Since
is unambiguous and
, one has
. It is easy to identify that
. Referring to the Lemma 1 in [
16], we know that given
, the diagonal matrix
Q has no identical entries on the diagonal, and
, then
. Substituting back into our problem, we find that the diagonal entries of
Φ are not the same as each other, and
, and thus
. If Lemma 1 is applying successively to the submatrices in
, one has a) if
, then
; b)
, otherwise. If the latter holds, according to the assumption that the
K coherent groups are uncorrelated to each other,
has
K linearly independent rows. Therefore,
. As
, one has
, and
eventually. ■
Remark 1. The parameter m plays a significant role in rank restoration since it determines the array’s DOF and effective aperture. We consider two extreme cases to discuss the choices of m. If , i.e., m achieves its upper bound, then one barely restores the rank deficiency with the minimum number of columns of , but this may result in some signals being undetected, especially at low SNRs or for few snapshots. On the other hand, If , i.e., m achieves its lower bound, then one restores the rank deficiency with redundant columns of , but this may cause biased estimates due to the noise subspace being one-dimensional. Based on our simulation results, the proposed method performs well when m lies between these two bounds, away from the extremes. However, the optimum choice of m is still an open problem and is beyond the scope of this paper.
When
and
, the non-singularity of the smoothed covariance matrix
can be recovered, then the MUSIC algorithm can be employed to estimate the DOAs of coherent signals. More specifically, one can perform the eigen-decomposition of
as
where
is a diagonal matrix consisting of the
N largest eigenvalues, and
is a diagonal matrix consisting of the
smallest eigenvalues. The columns of
are the eigenvectors corresponding to the
N largest eigenvalues, while the columns of
are the eigenvectors corresponding to the
smallest eigenvalues. According to the subspace principle, the columns of
span the signal subspace, which coincides with the range space of
A, and the signal subspace is orthogonal to the noise subspace spanned by the columns of
. Thus,
This indicates that the DOAs of the coherent signals can be obtained by finding the
N peaks from the spatial spectrum function
So far, we have described the proposed algorithm for coherent signal DOA estimation in the presence of unknown mutual coupling. The major steps of the proposed algorithm are summarised as follows:
Step 1. Obtain
L snapshots of the received signal
at
, and form the following matrix as:
Step 2. Calculate the covariance matrix using the above data matrix by
Step 3. Select the middle array and calculate corresponding covariance matrix according to Equation (6);
Step 4. Utilise rows of to construct the matrix , according to Equation (10);
Step 5. Construct the overall rank-restored matrix as Equation (14);
Step 6. Perform the eigen-decomposition of , and obtain the noise subspace ;
Step 7. Scan the direction over [−90°, 90°] with a step size of 0.1°. Calculate the spacial spectrum using Equation (18), and obtain the DOA estimates .
Although the mutual coupling information for a sensor array is a cumbersome calculation using electromagnetic simulators and measurement in practice, for some circumstances, such as high precision applications in satellite navigation and airborne early warning radar, it has to be obtained and compensated for a-priori. In the presence of known mutual coupling, we should first eliminate the effects of mutual coupling before applying the matrix reconstruction for rank restoration. To be specific, the following steps have to be carried out:
Step 1. Perform eigen-decomposition of
, one has
Since and span the same signal subspace, there holds where is a nonsingular matrix.
Step 2. Reconstruct a covariance matrix by compensating for mutual coupling effects as
Then, following the similar Steps 4–7 in the unknown mutual coupling case one can resolve the coherent signals.
Remark 2. Once the mutual coupling information is known, one can compensate the coupling effects by Equation (22), and then the additional information of the auxiliary sensors, which had to be abandoned in the case of unknown mutual coupling, can now be exploited. Compared with Equation (14) using ,
there are more matrices available after mutual coupling compensation, which means that more DOF and a larger effective aperture can be achieved, and improved estimation performance can thus be expected. In fact, our method can handle up to coherent signals in the presence of known mutual coupling. The identifiability of DOA estimation for the proposed and comparative methods with unknown mutual coupling will be discussed in Section 3.3.
3.3. Separable Signal Number
The coherent signals are resolved with an increased effective array aperture compared with previous techniques. This makes better use of the DOF of the original ULA and allows more signals to be resolved. This motivates us to discuss the number of separable signals of the proposed method. Compared with the standard spatial smoothing (SS) technique, which estimates the coherent signals by averaging subarrays, under unknown mutual coupling [
14], the maximum number of signals estimated by our method can be relaxed. If
and
, the proposed method can estimate a maximum number of
coherent signals since
, while the standard spatial smoothing can estimate at most
coherent signals since
subarrays are required and
. As we can see, the key factor influencing the number of resolvable coherent signals is the maximum number of signals in one coherent group, in other words, the larger
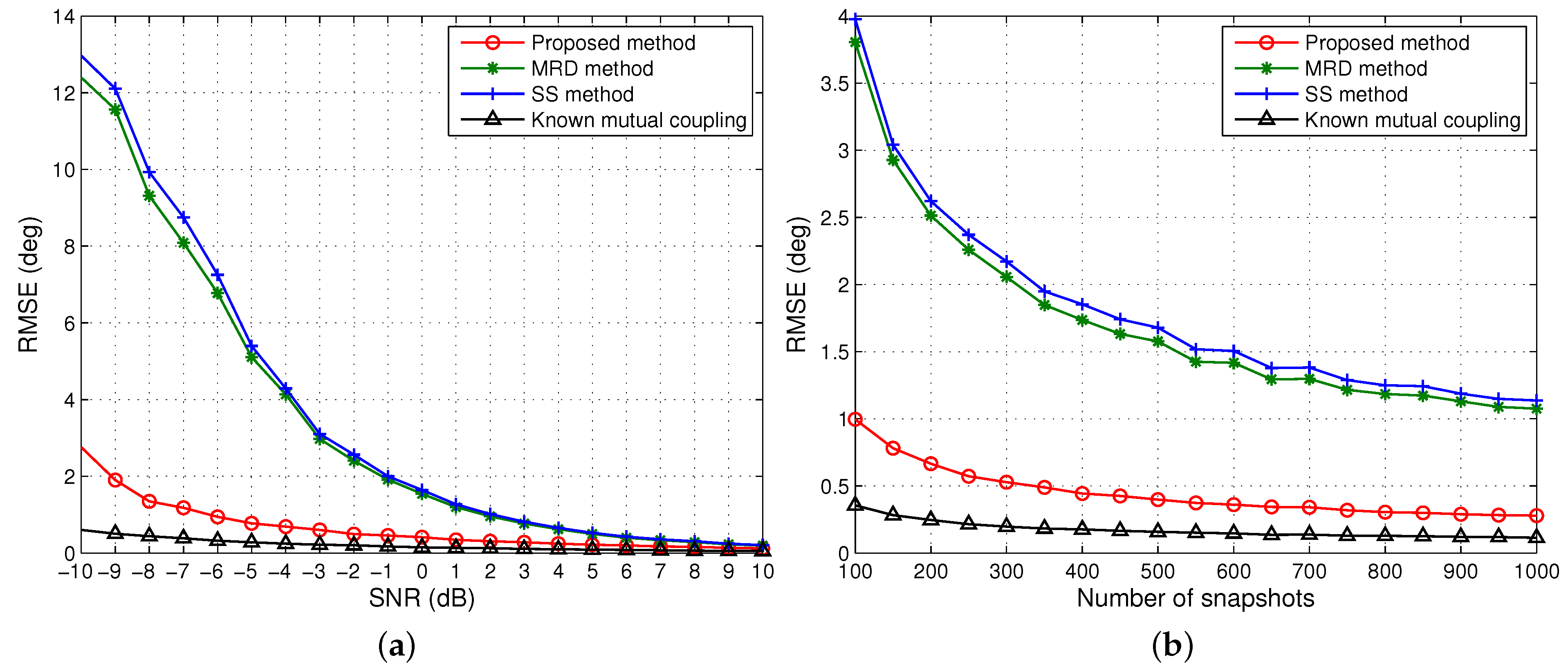
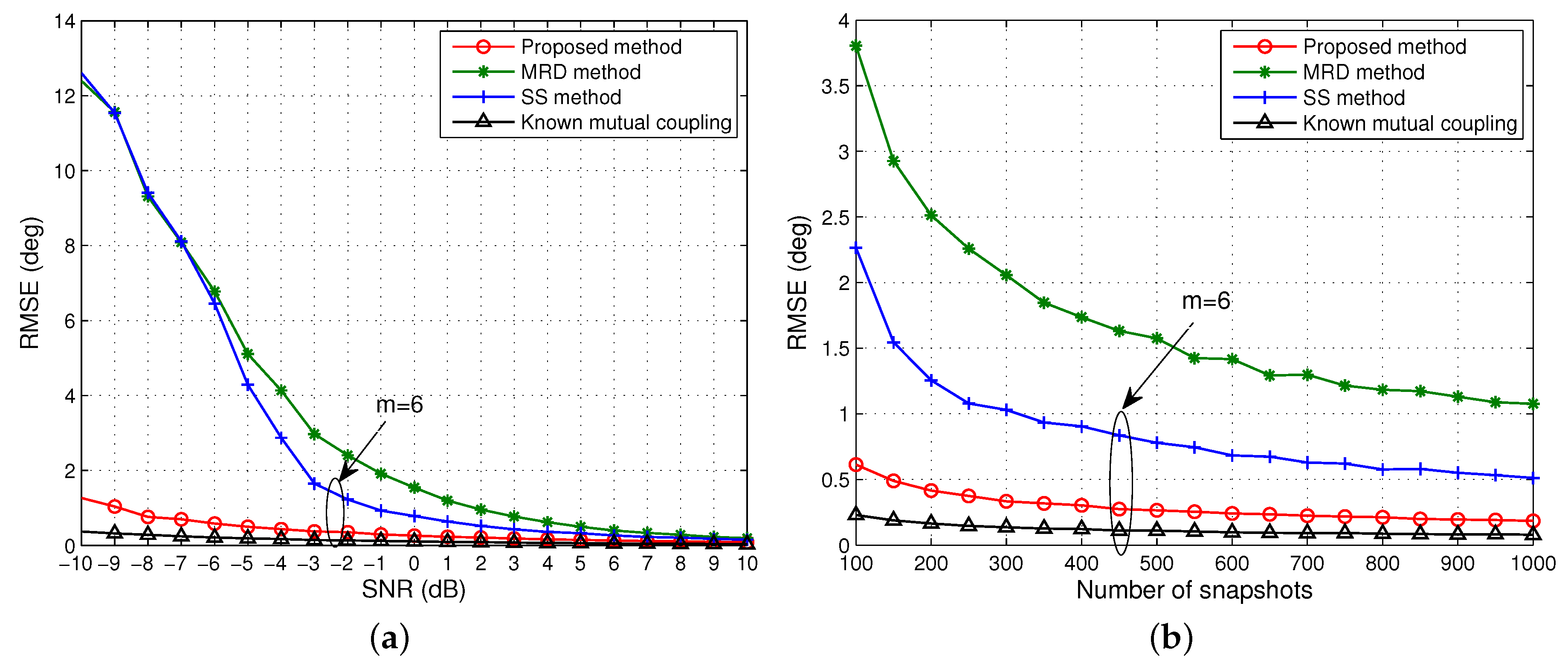
is, the better our approach performs. Our approach also has better DOA estimation accuracy than SS as will be demonstrated by the simulation results in the next section. The method by Mao
et al. [
15], referred to as matrix reconstruction in data (MRD), can also achieve better DOA estimation accuracy than SS, provided that the effective array aperture is the same, but this comes at a cost of the number of signals which can be resolved. It can resolve at most
coherent signals and the array aperture is fixed regardless of the number of coherent sources. The spatial smoothing techniques are more flexible in this aspect as the number of subarrays and effective array aperture can be varied. Both the algorithms in [
14,
15] also ignore the conjugate of the received data in rank restoration, which significantly restricts the number of resolvable signals in practice.
Table 1 lists the minimum number of array elements required to resolve a given number of signals by the three methods. For simplicity, we assume that each group has the same number of coherent signals. We can see that our method can use less array elements than the other two algorithms, to estimate the same number of signals.
Table 1.
Minimum number of array elements required.
Table 1.
Minimum number of array elements required.
| Coupling Length | Coherent Signals | Total Signals | Number of Array Elements |
|---|
| Groups | Signals in Each Group | SS | MRD | Proposed Method |
|---|
| 2 | 1 | 2 | 2 | 6 | 7 | 5 |
| 2 | 2 | 2 | 4 | 8 | 11 | 7 |
| 3 | 1 | 4 | 4 | 12 | 13 | 10 |
| 3 | 2 | 3 | 6 | 13 | 17 | 12 |
| 4 | 1 | 6 | 6 | 18 | 19 | 15 |
| 4 | 2 | 4 | 8 | 18 | 23 | 16 |
| 4 | 2 | 6 | 12 | 24 | 31 | 21 |
| 3 | 3 | 6 | 18 | 28 | 41 | 23 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}