
Implementation of ANN-Based Embedded Hybrid Power Filter Using HIL-Topology with Real-Time Data Visualization through Node-RED


 , , ,
, , ,  and
and 
Abstract
:1. Introduction and Related Studies
- ➢
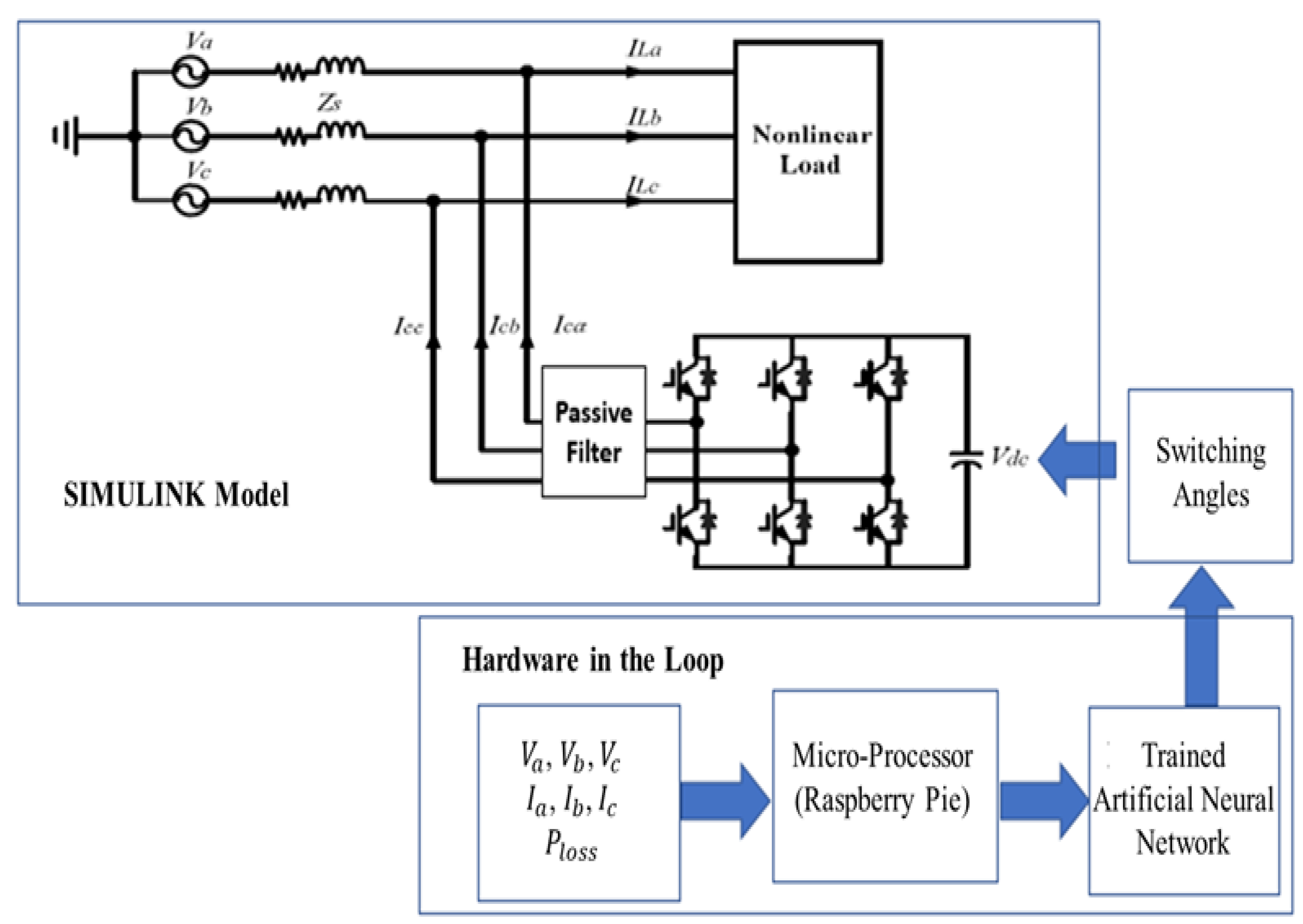
- Design of a SIMULINK model for HSAHPF based on ANN.
- ➢
- Python scripting for hybrid active power filter.
- ➢
- Implementation of Hardware in the loop (HIL) based environment for communication between SIMULINK and the microprocessor.
2. Materials and Methods
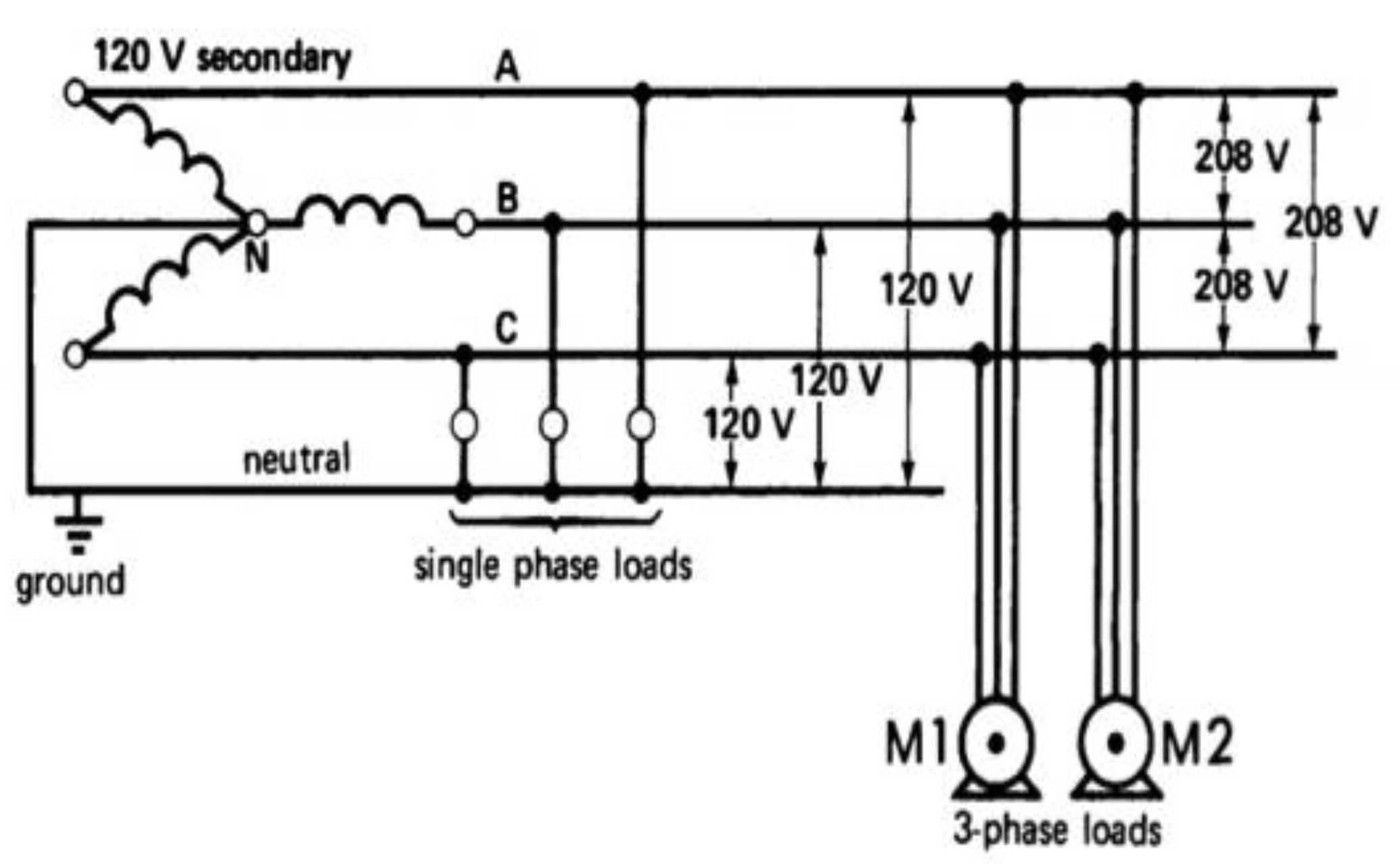
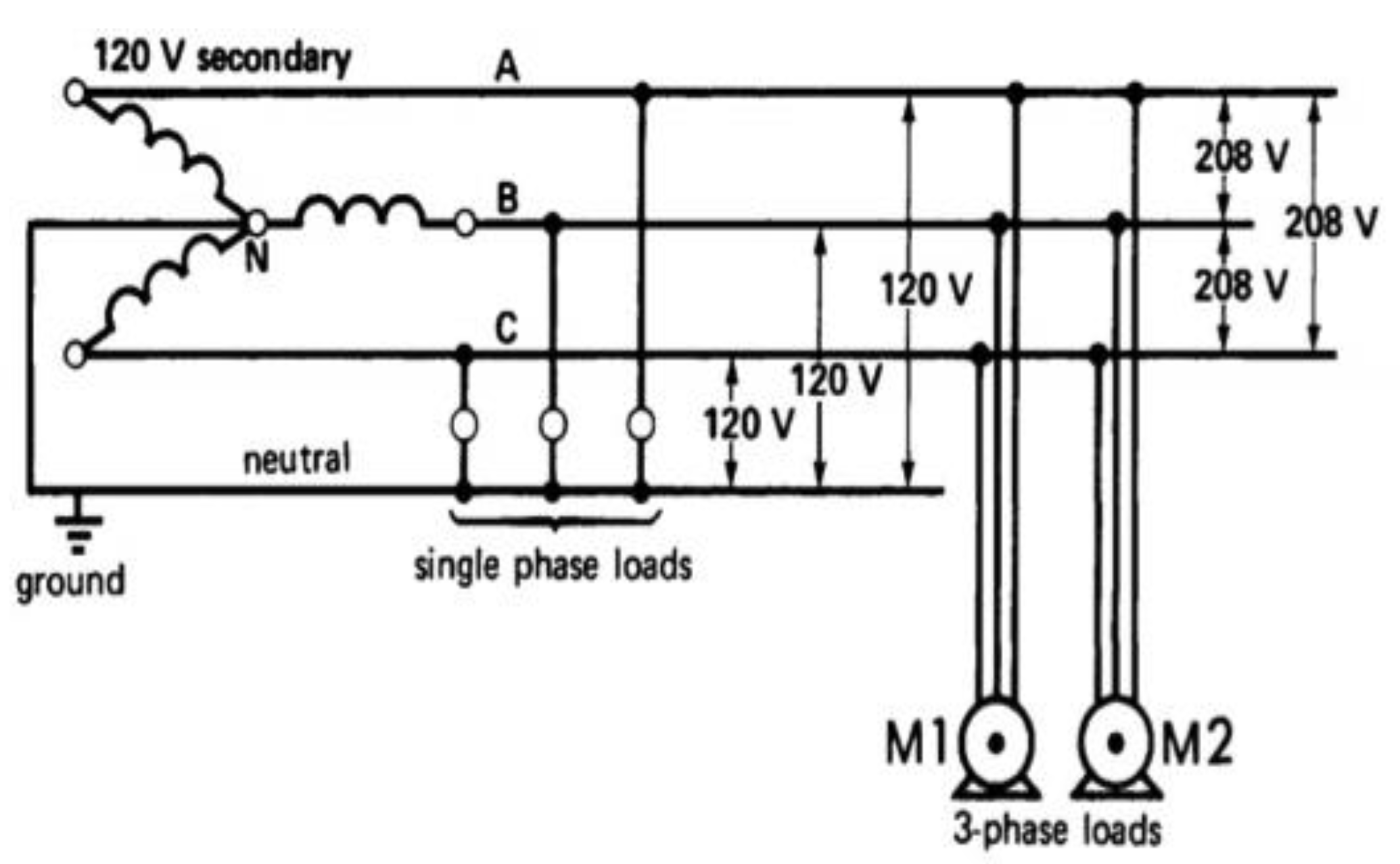
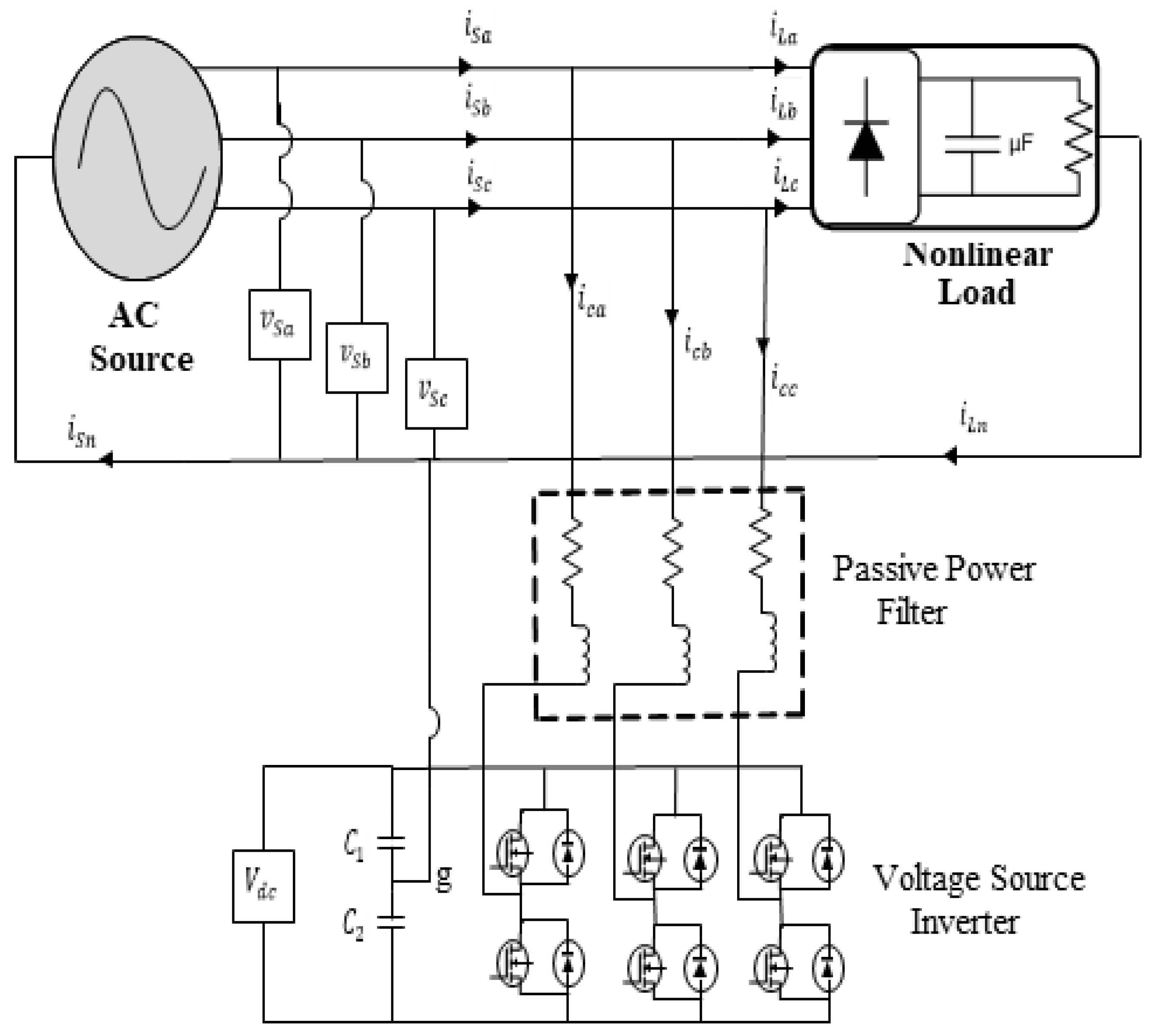
2.1. Load Management in a 3-∅, Four-Wire System
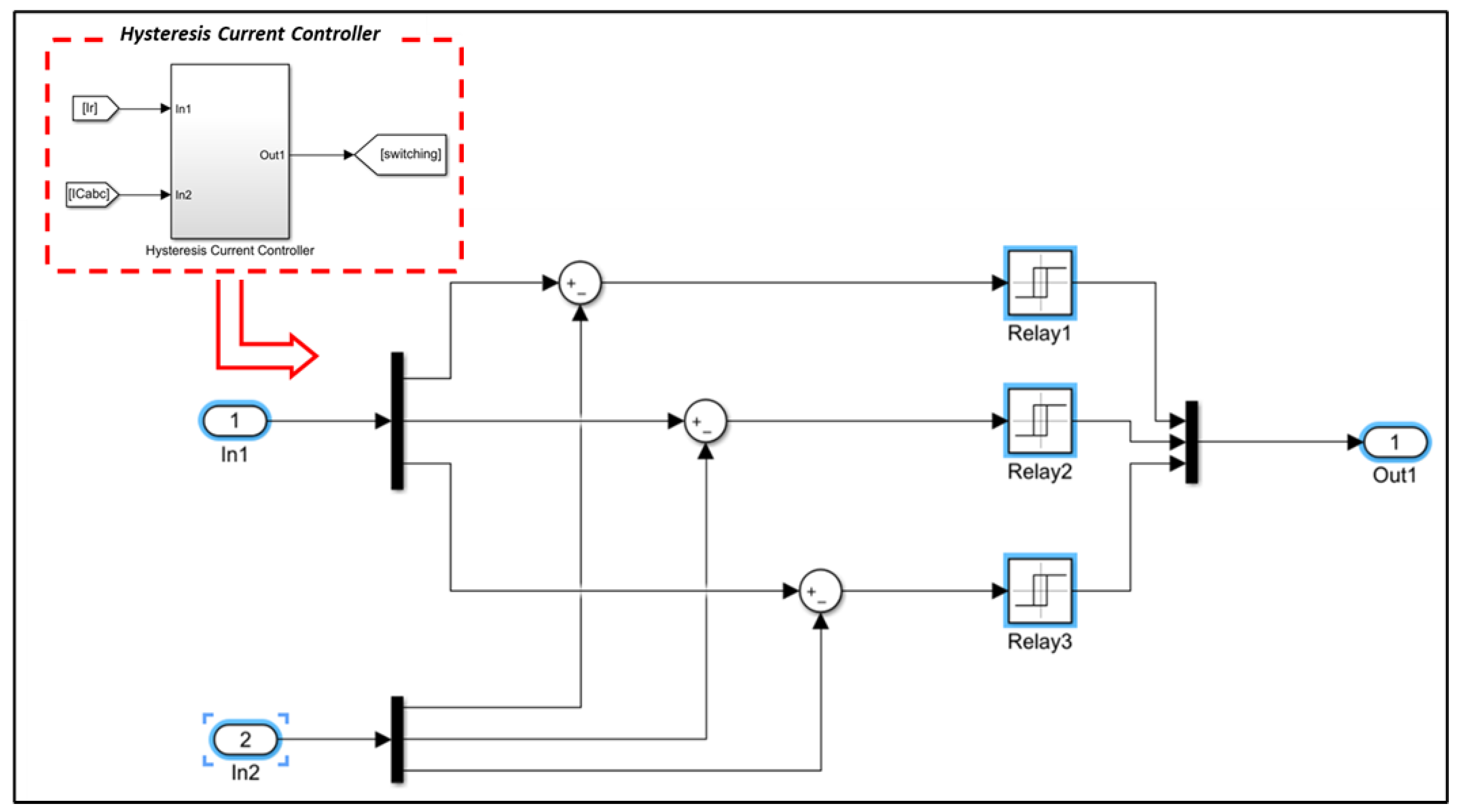
2.1.1. Conventional Control Methods of HSAHPF
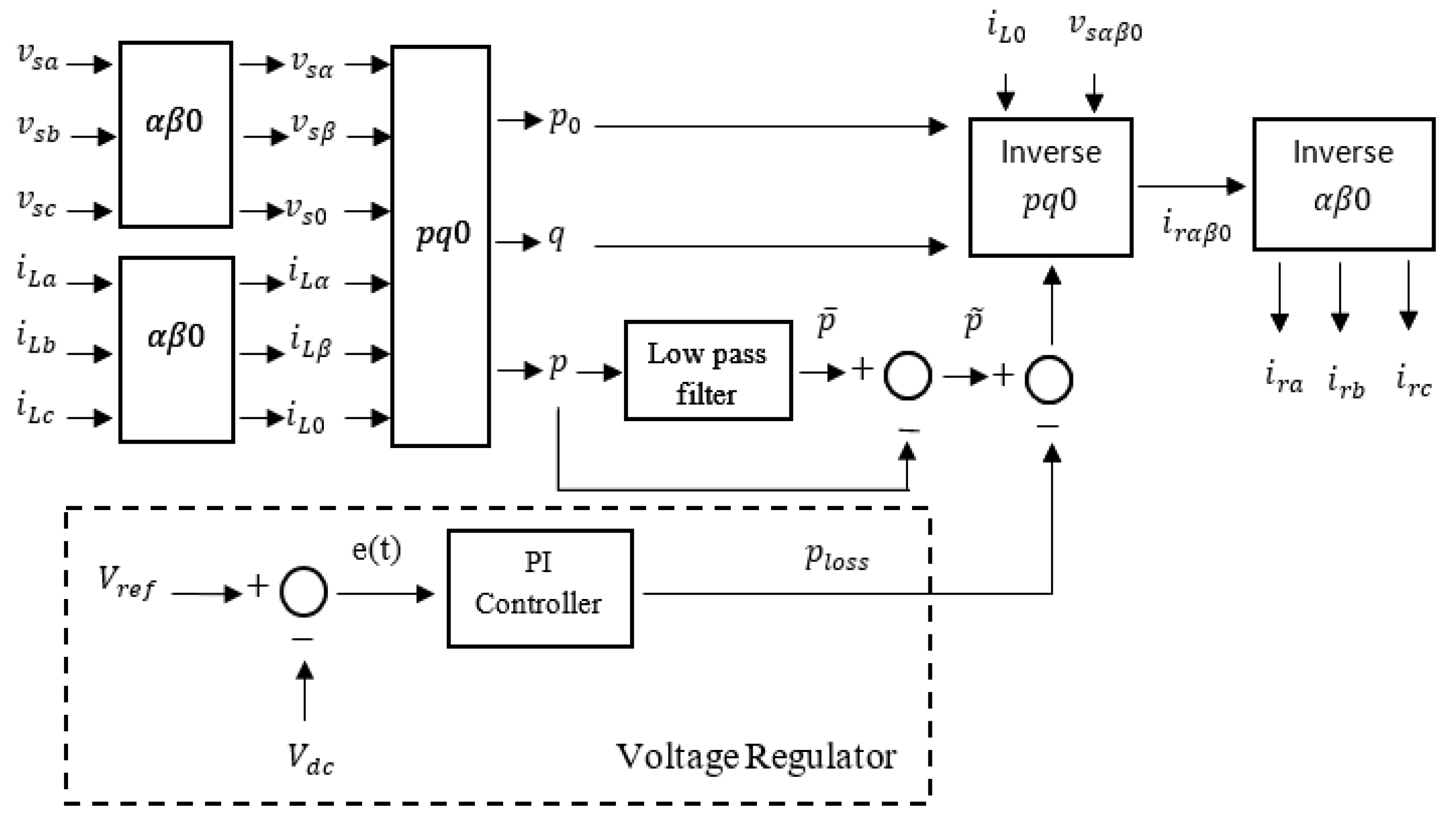
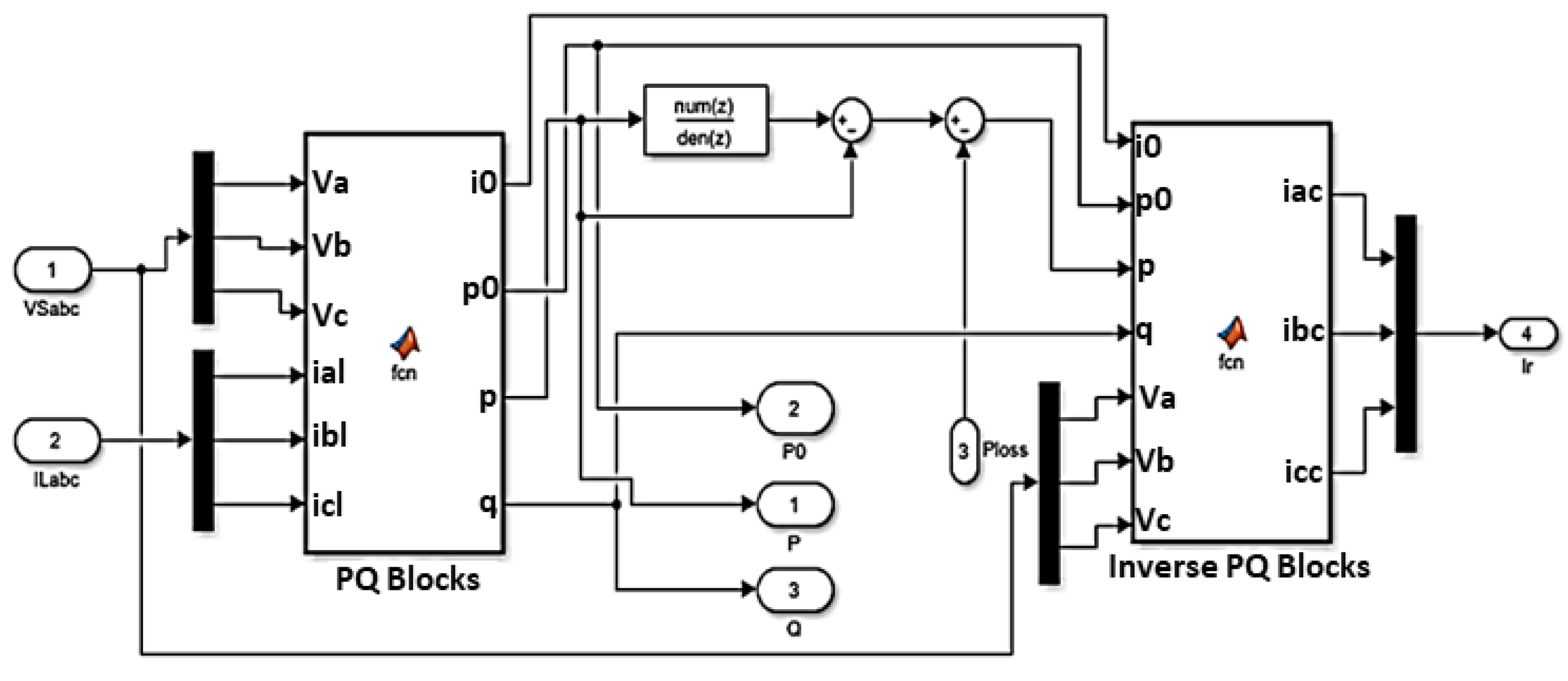
2.1.2. Instantaneous Active and Reactive Power Theory (Pq0)
- ➢
- Transformation of power system current and voltage from abc domain to αβ0 domain.
- ➢
- Transformation of αβ0 domain voltage and current into active and reactive powers.
2.1.3. Parameters and Proposed Control Techniques
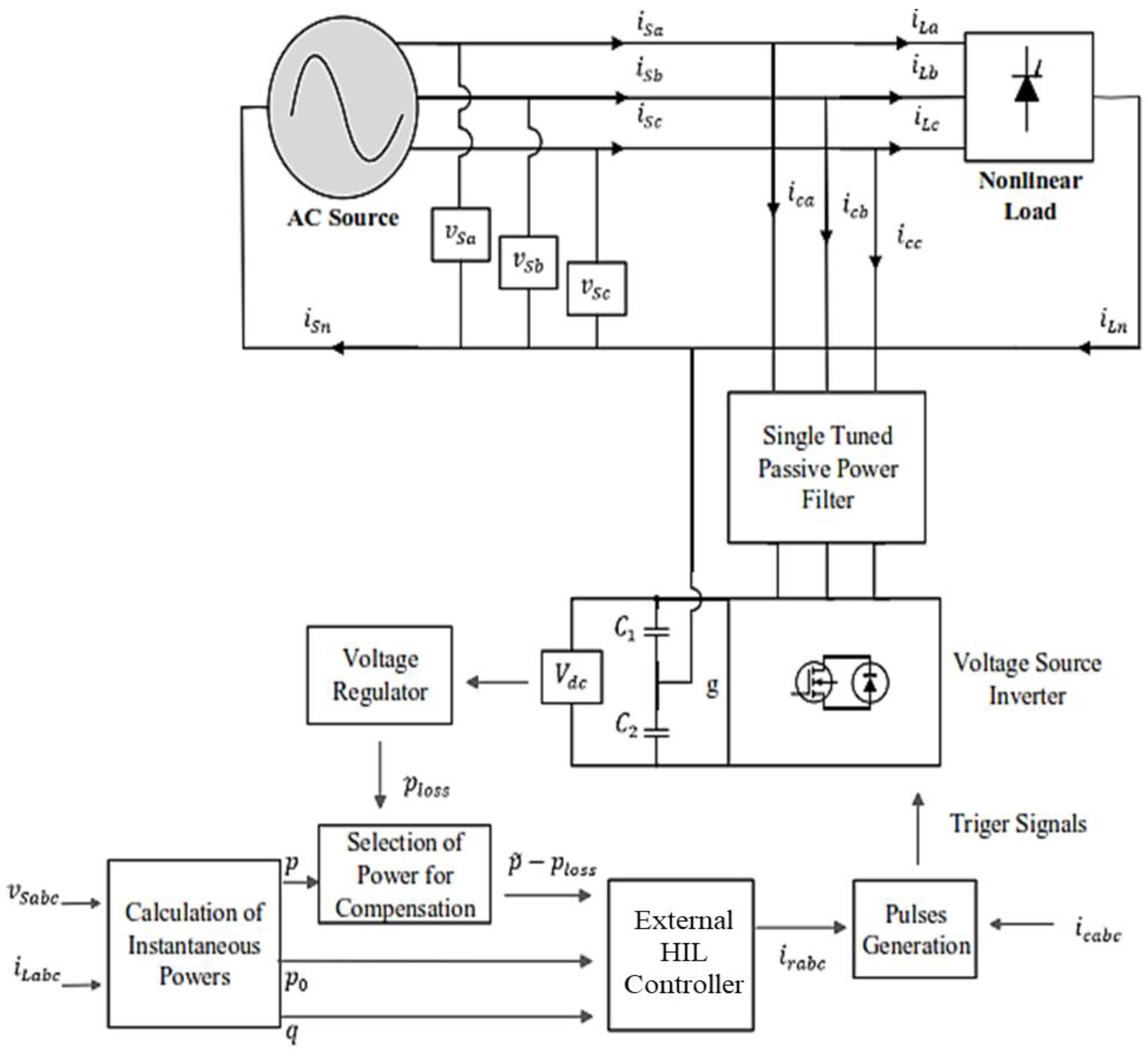
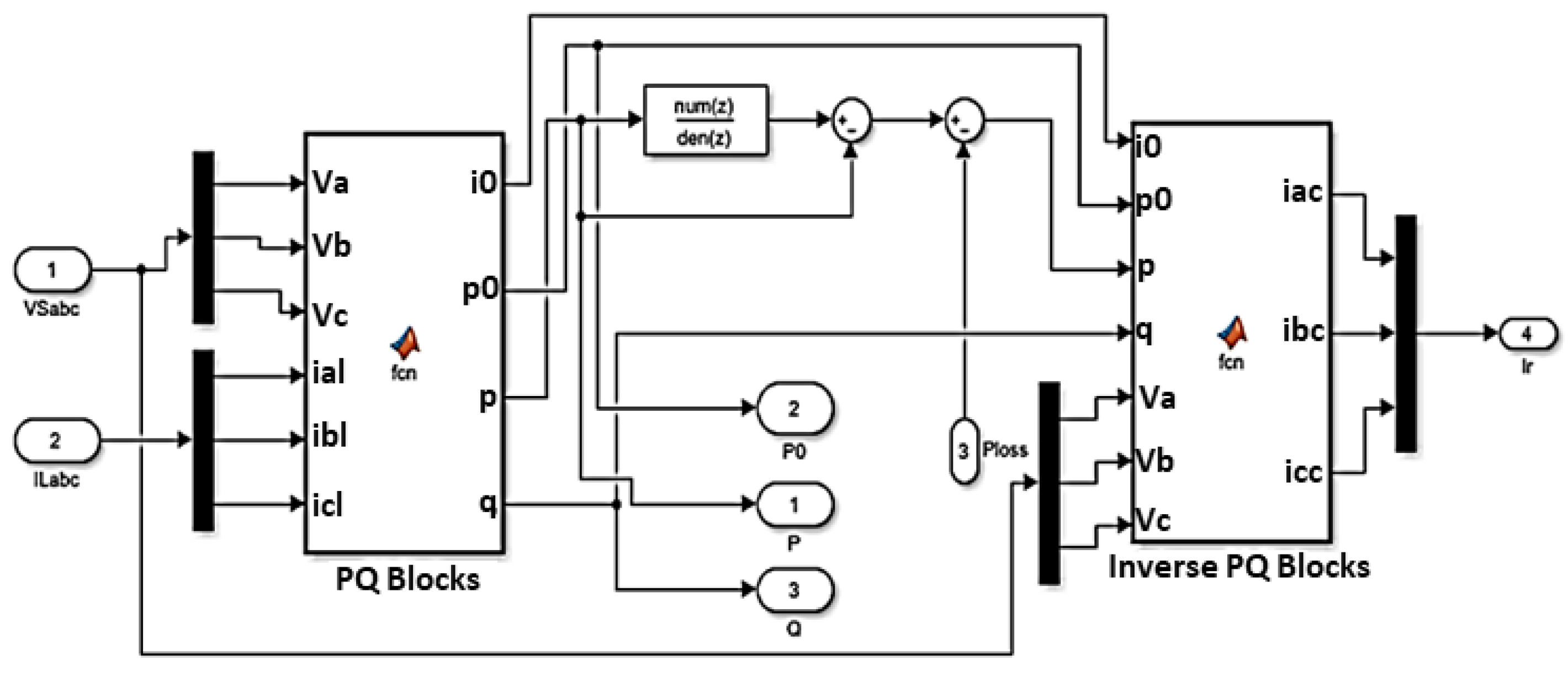
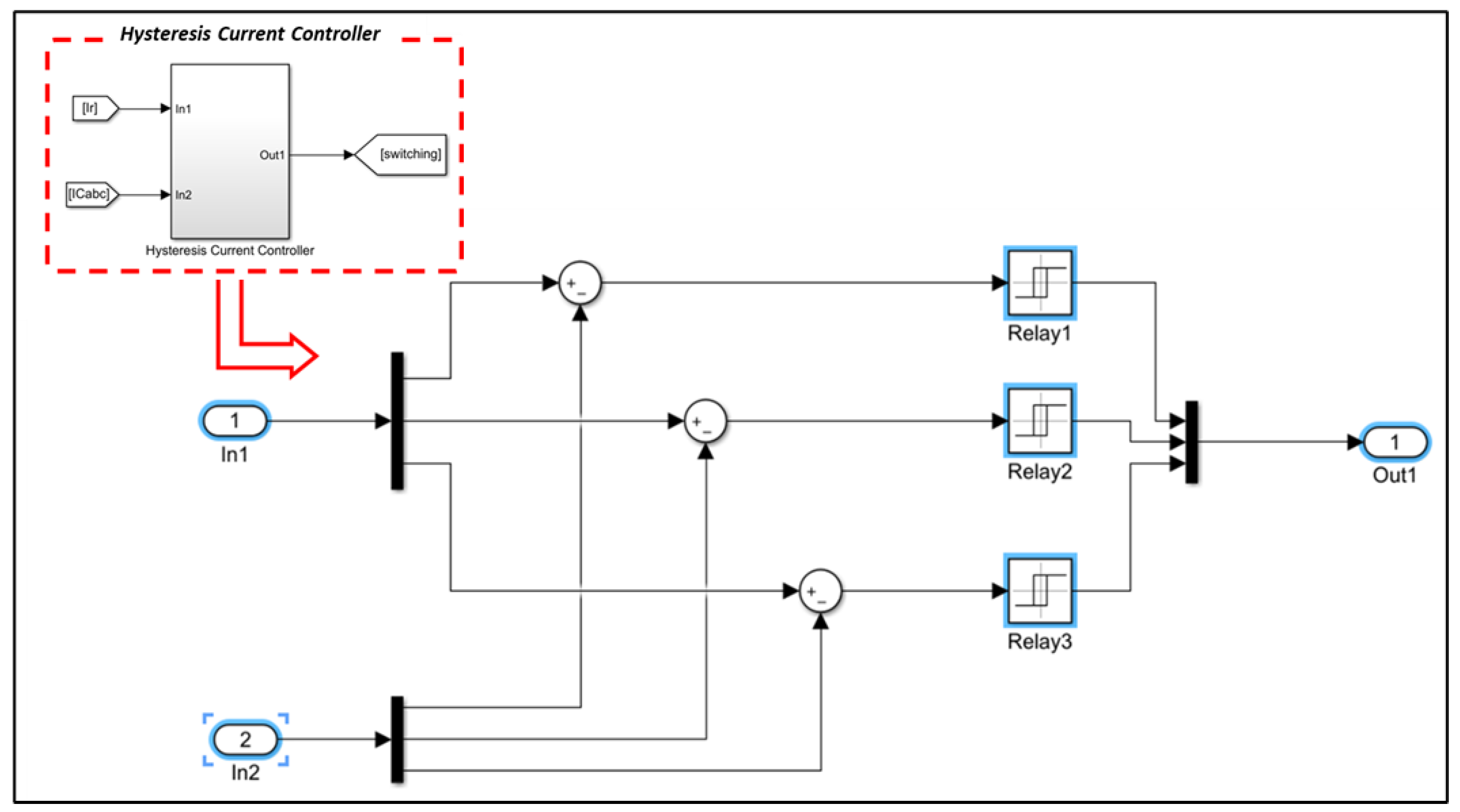
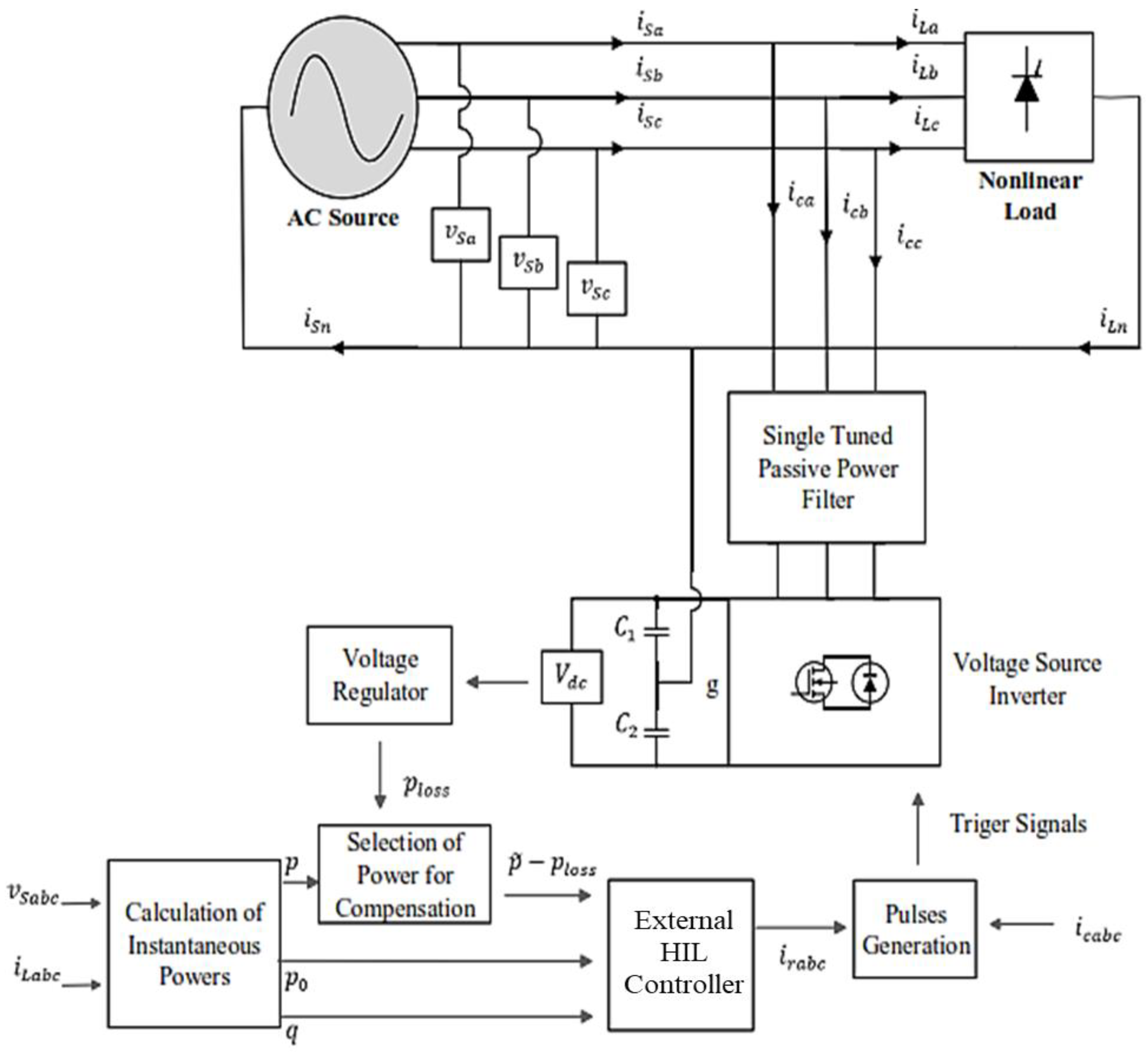
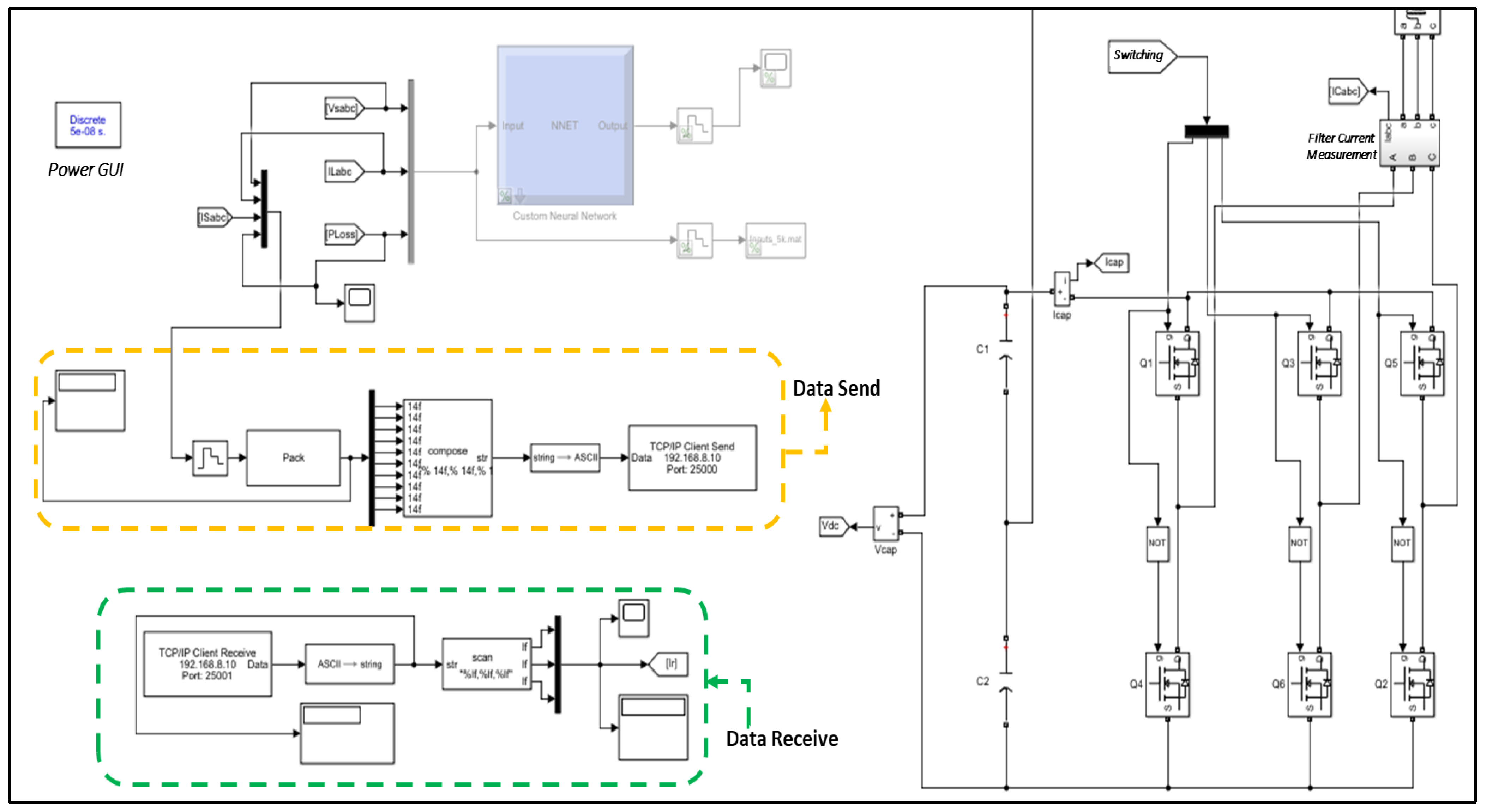
2.1.4. SIMULINK Based Implementation of Pq0 Control Technique
- ➢
- DC Voltage Regulator.
- ➢
- Calculation of instantaneous powers.
- ➢
- Selection of power for compensation.
- ➢
- Calculation of reference currents.
2.2. Predictive Analysis
2.2.1. Simulated Environment Based on ANN in MATLAB SIMULINK
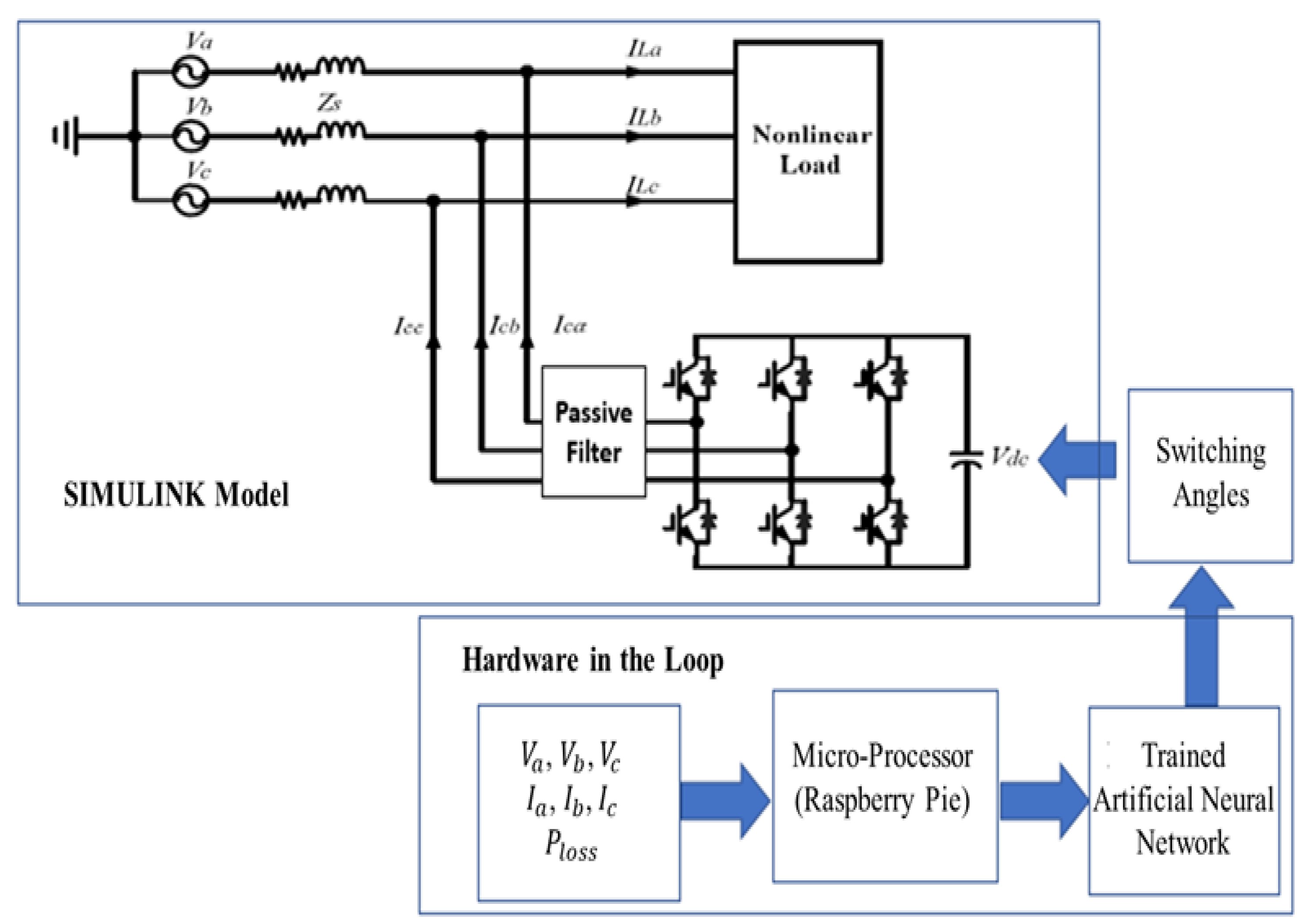
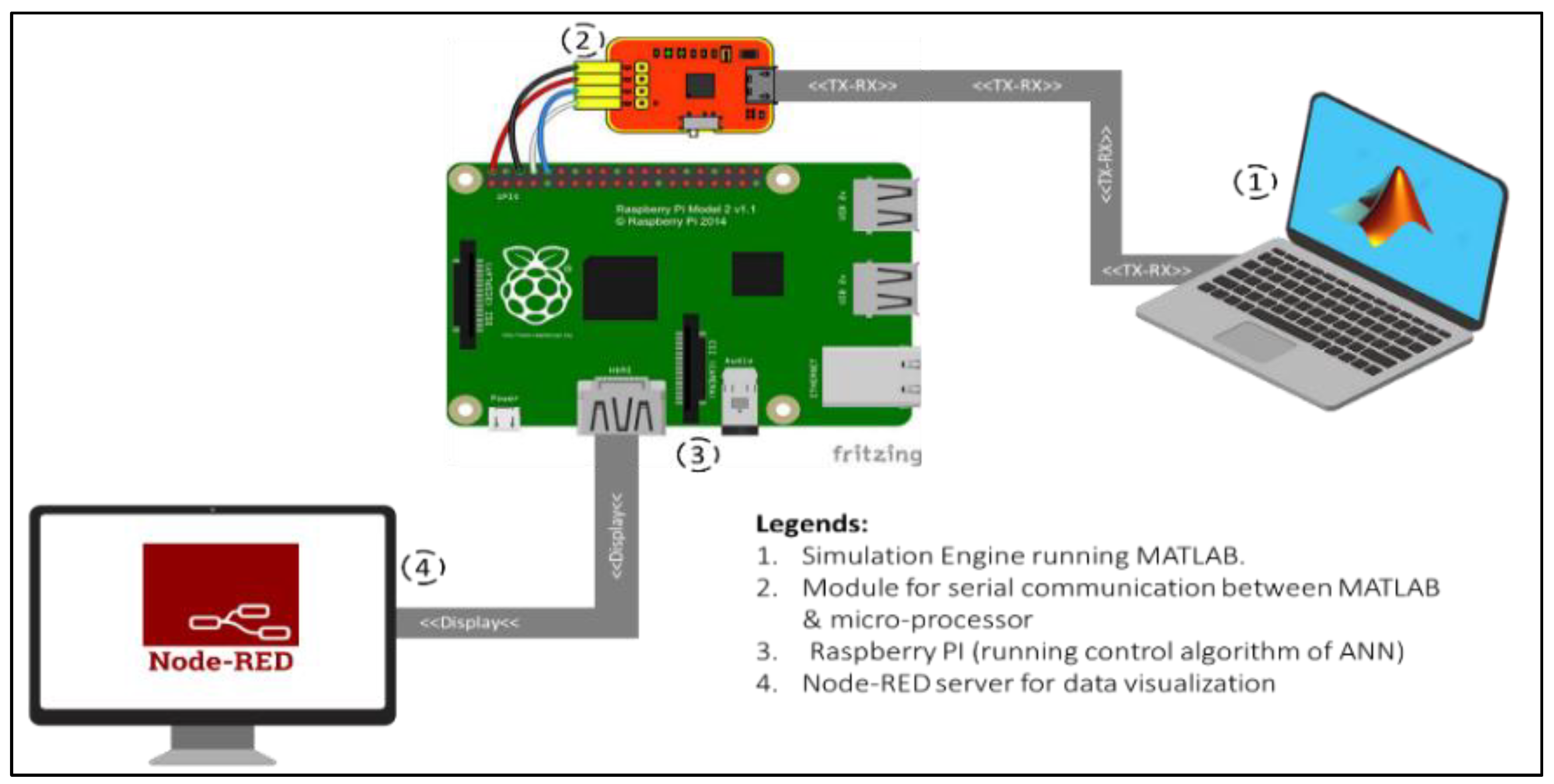
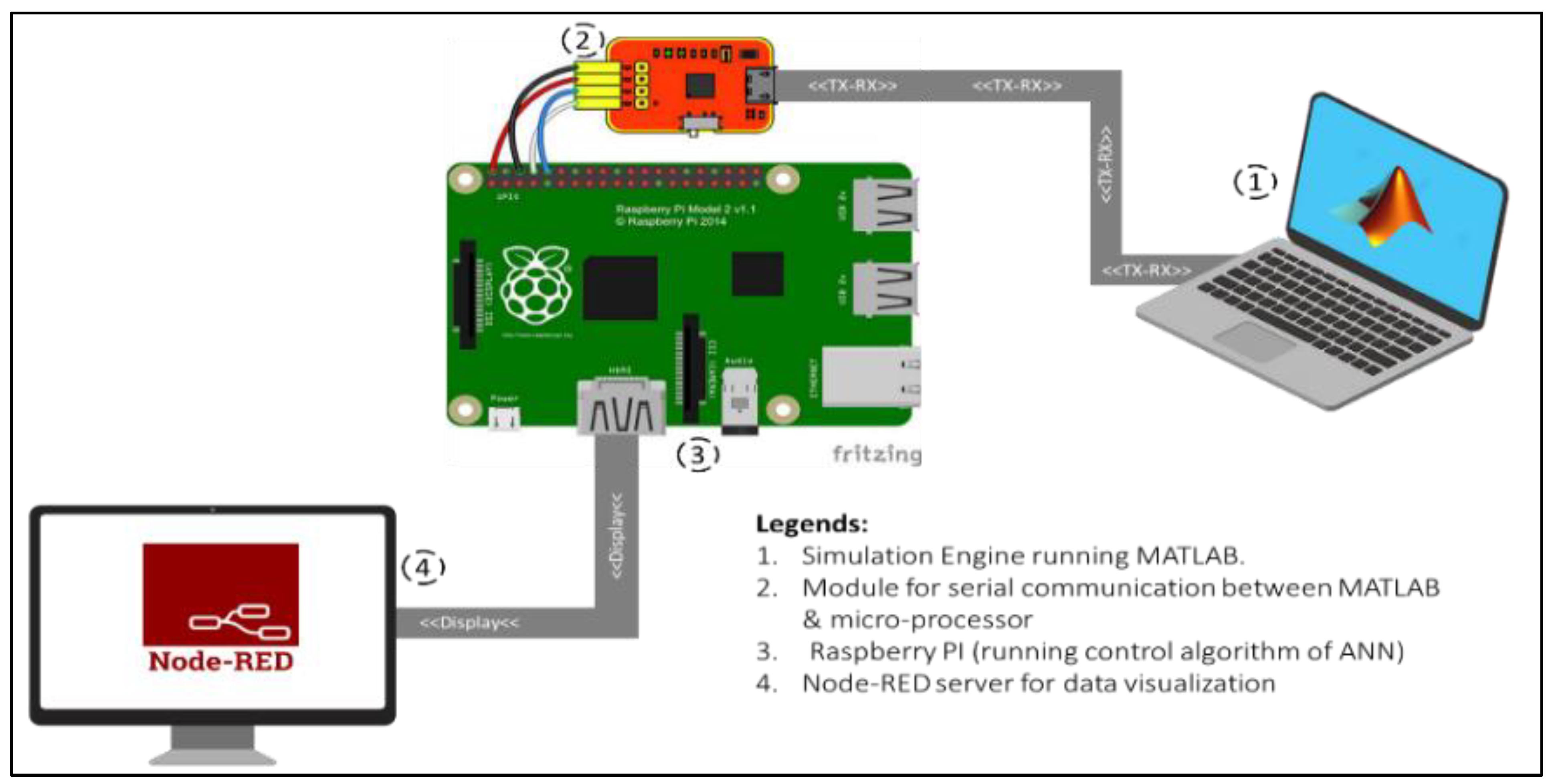
2.2.2. Integration of HIL Architecture on Raspberry PI
- (a)
- Initialization;
- (b)
- Forward propagation;
- (c)
- Cost function formulation;
- (d)
- Backpropagation;
- (e)
- Weights update;
- (f)
- Iteration until convergence.
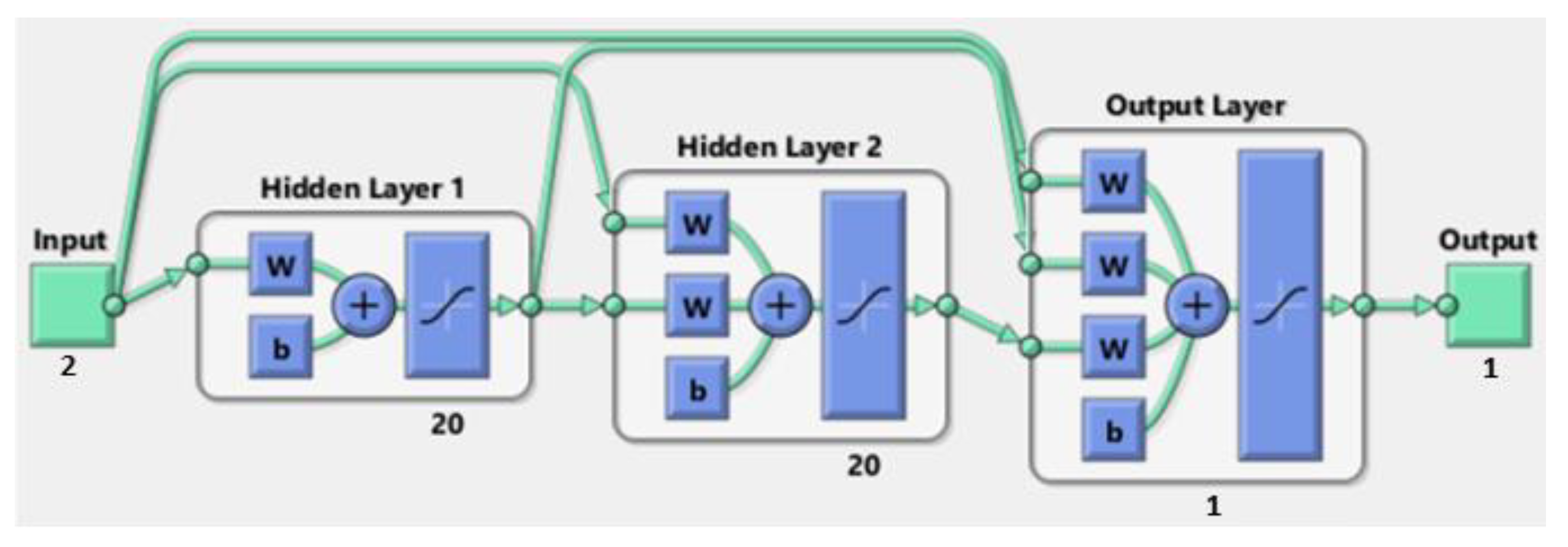
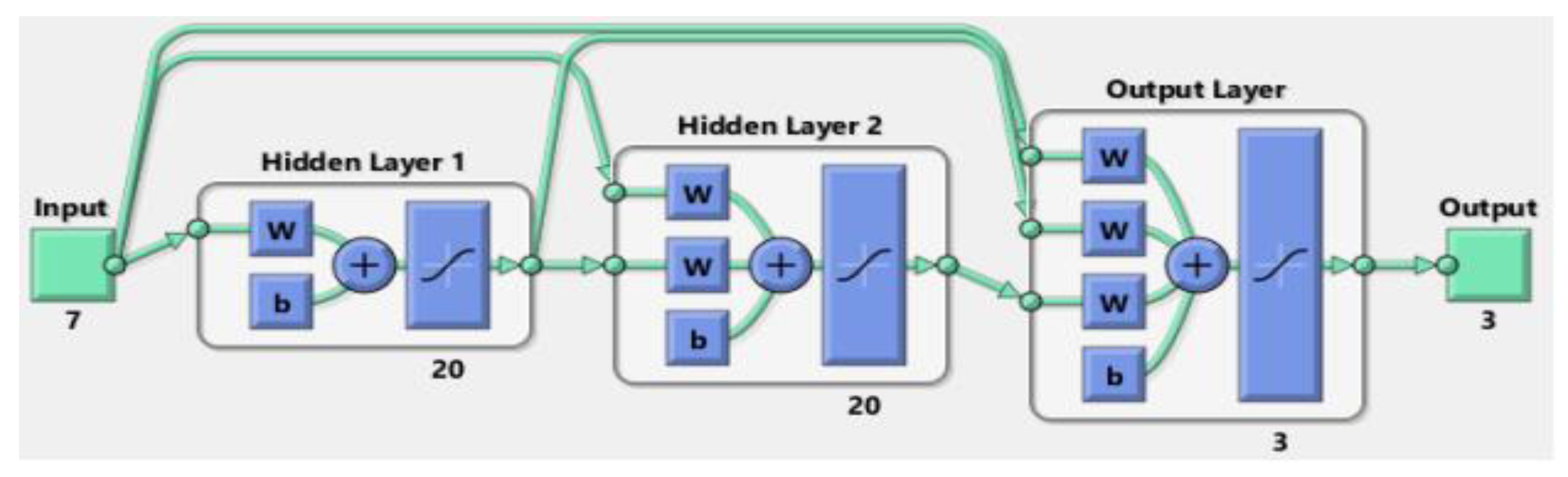
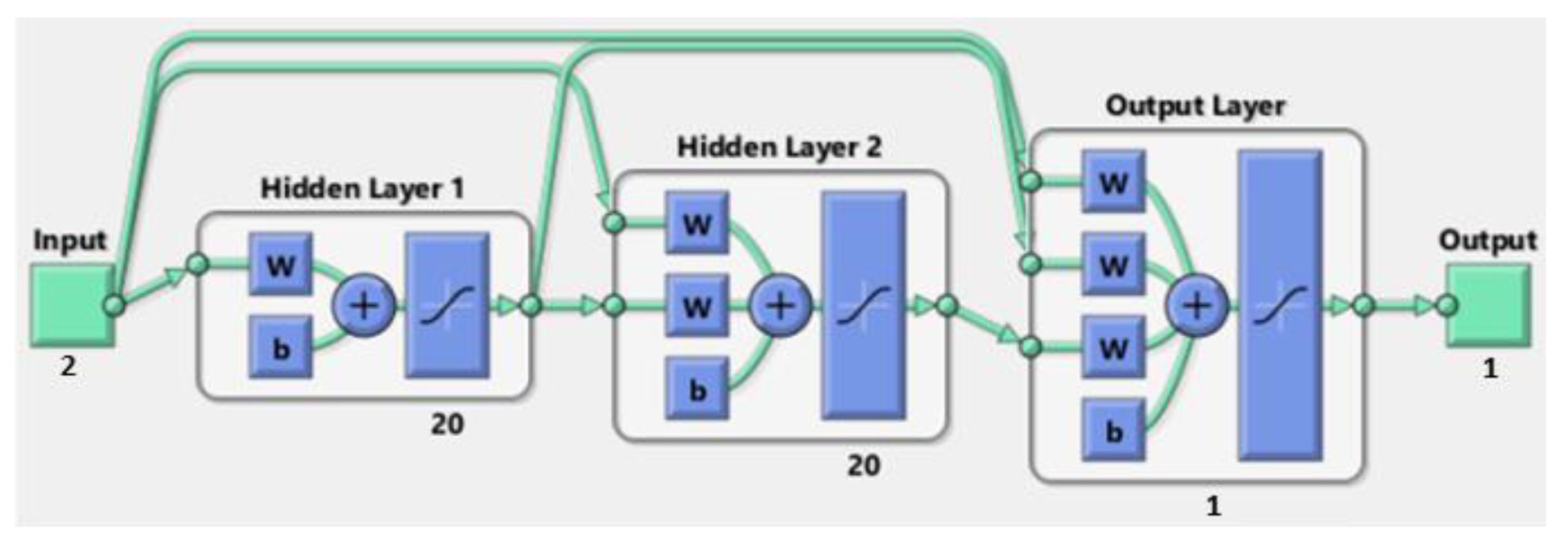
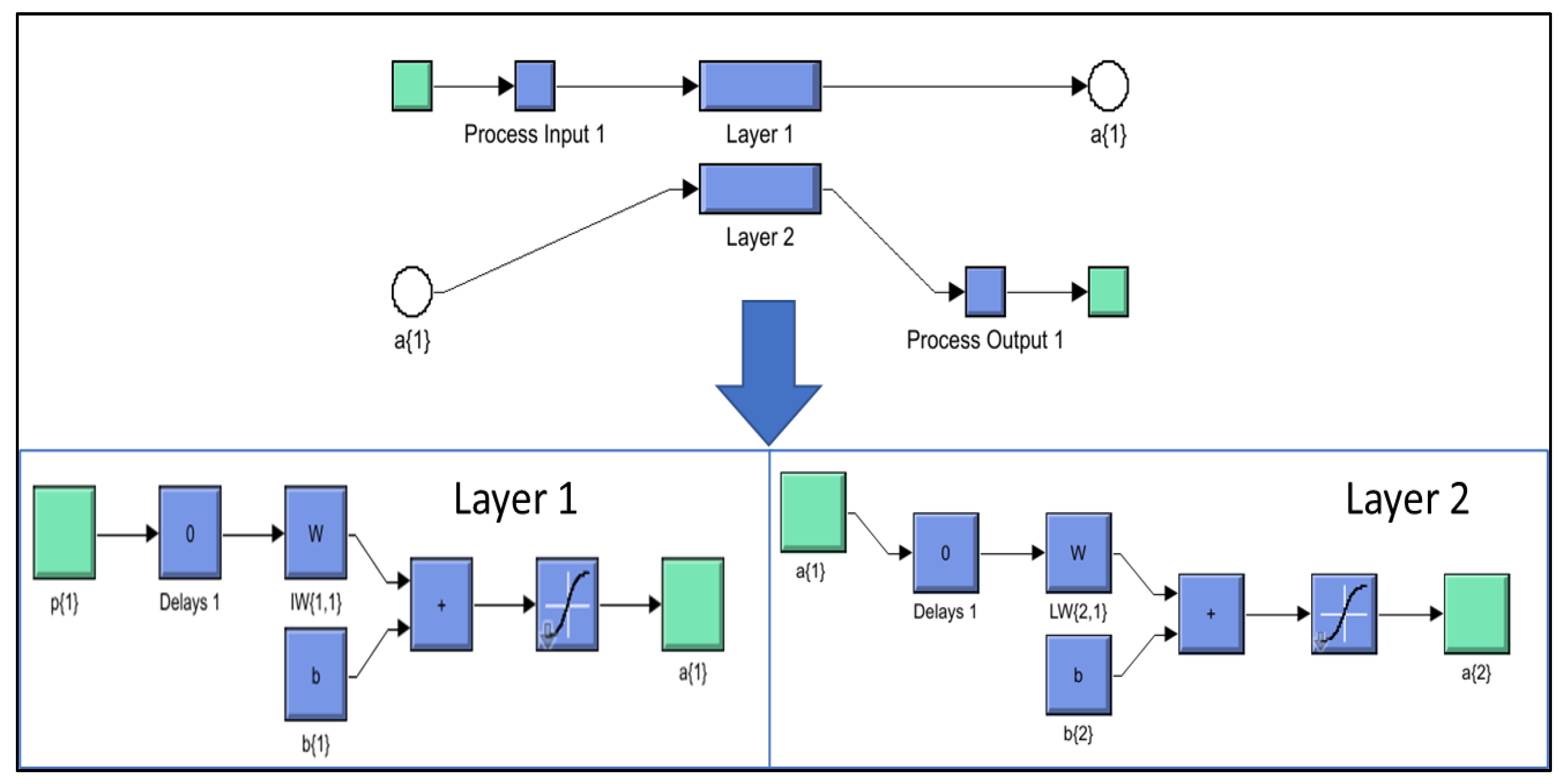
2.3. Modeling of the Artificial Neural Network
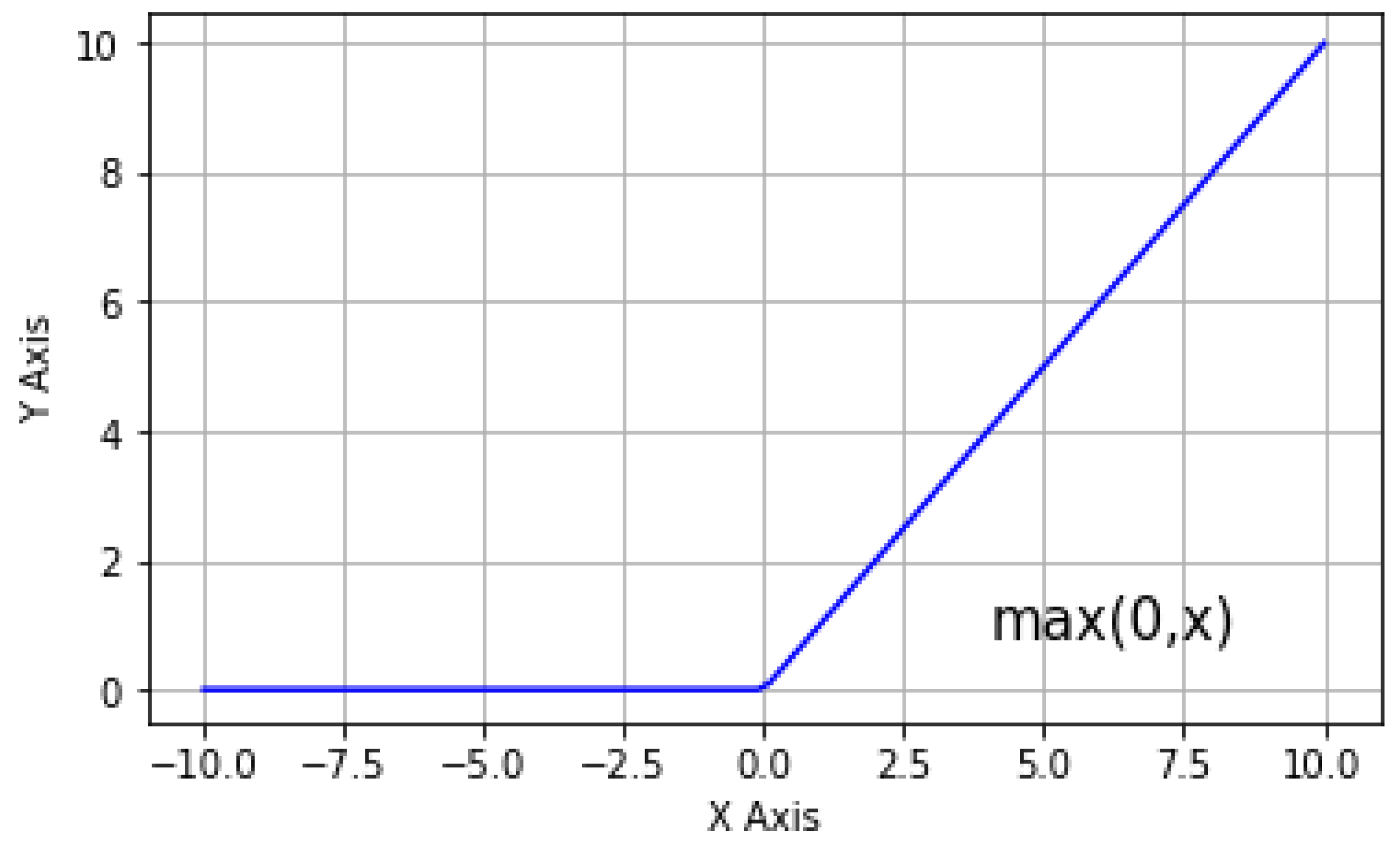
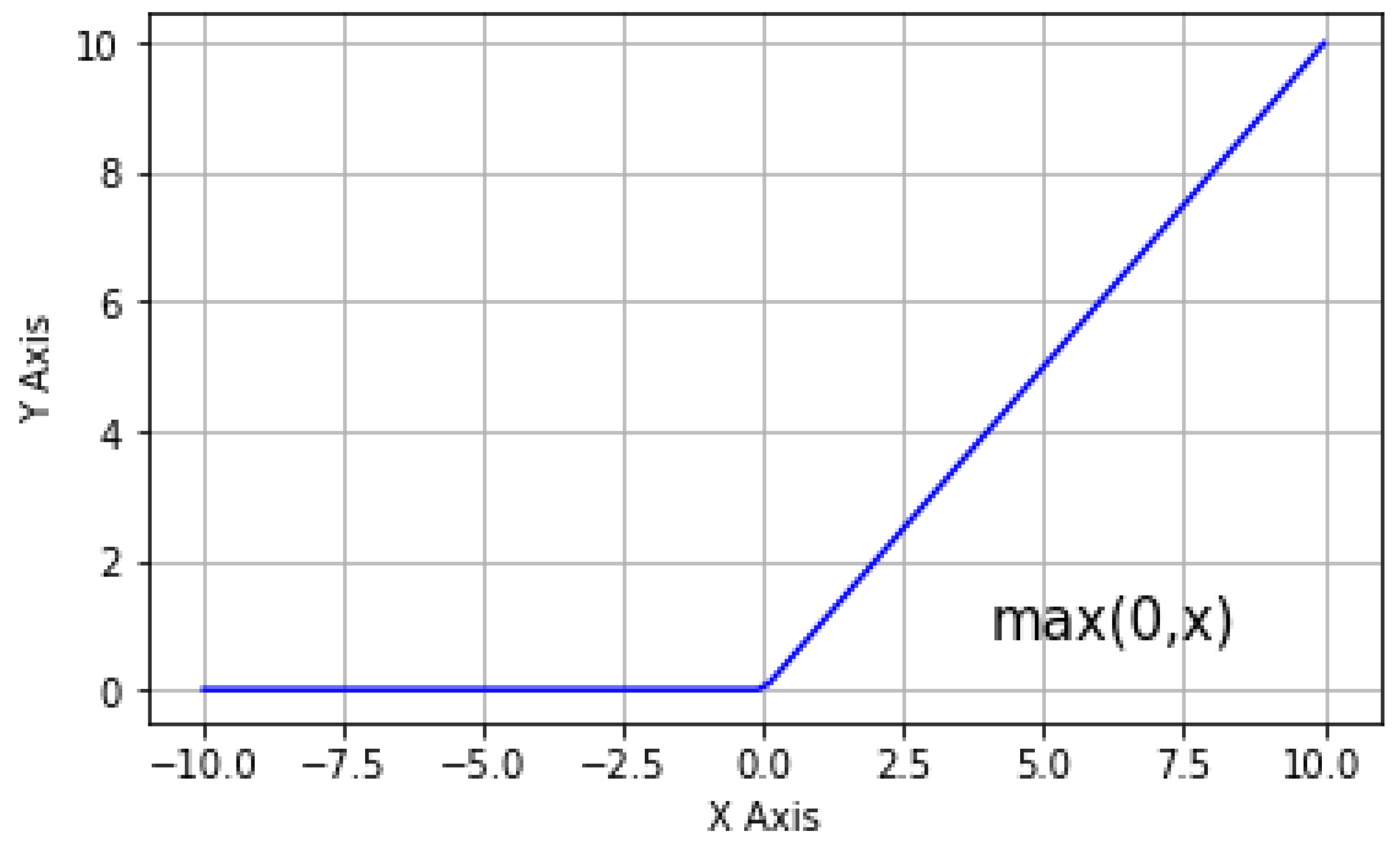
2.3.1. Comparison of Activation Functions
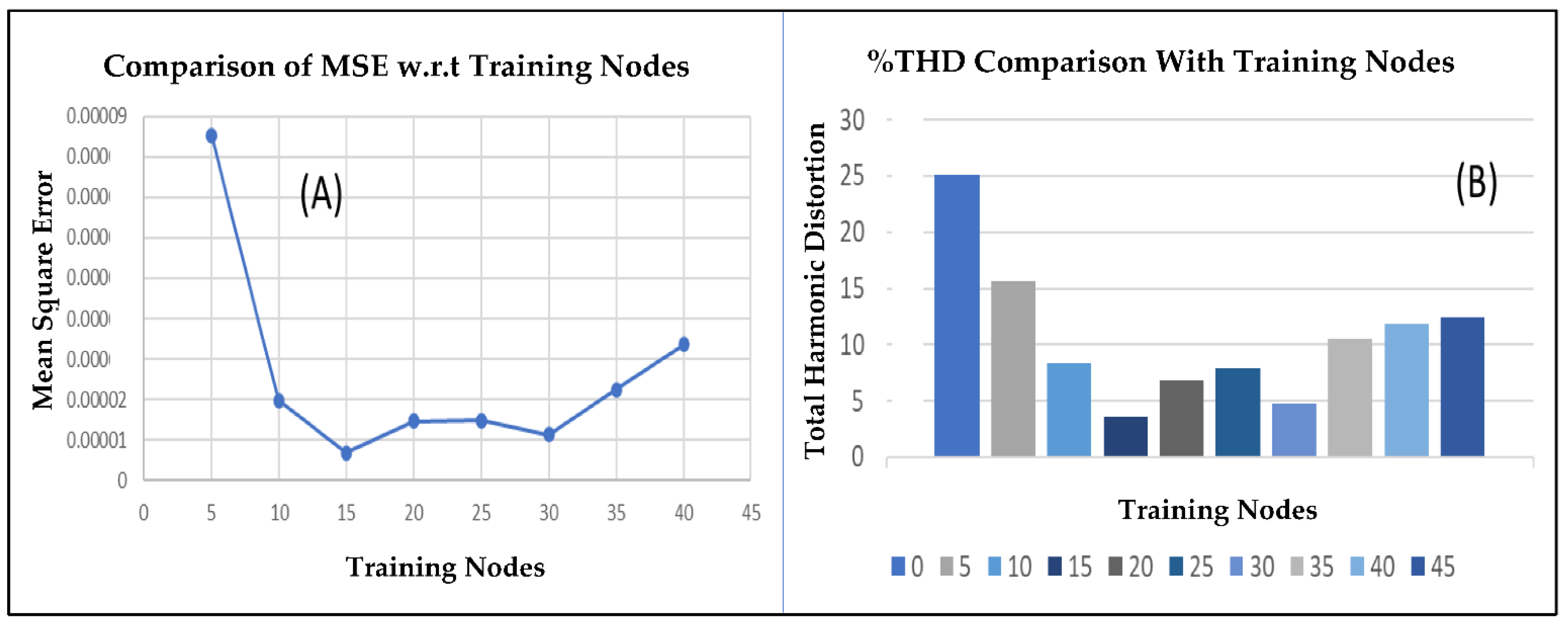
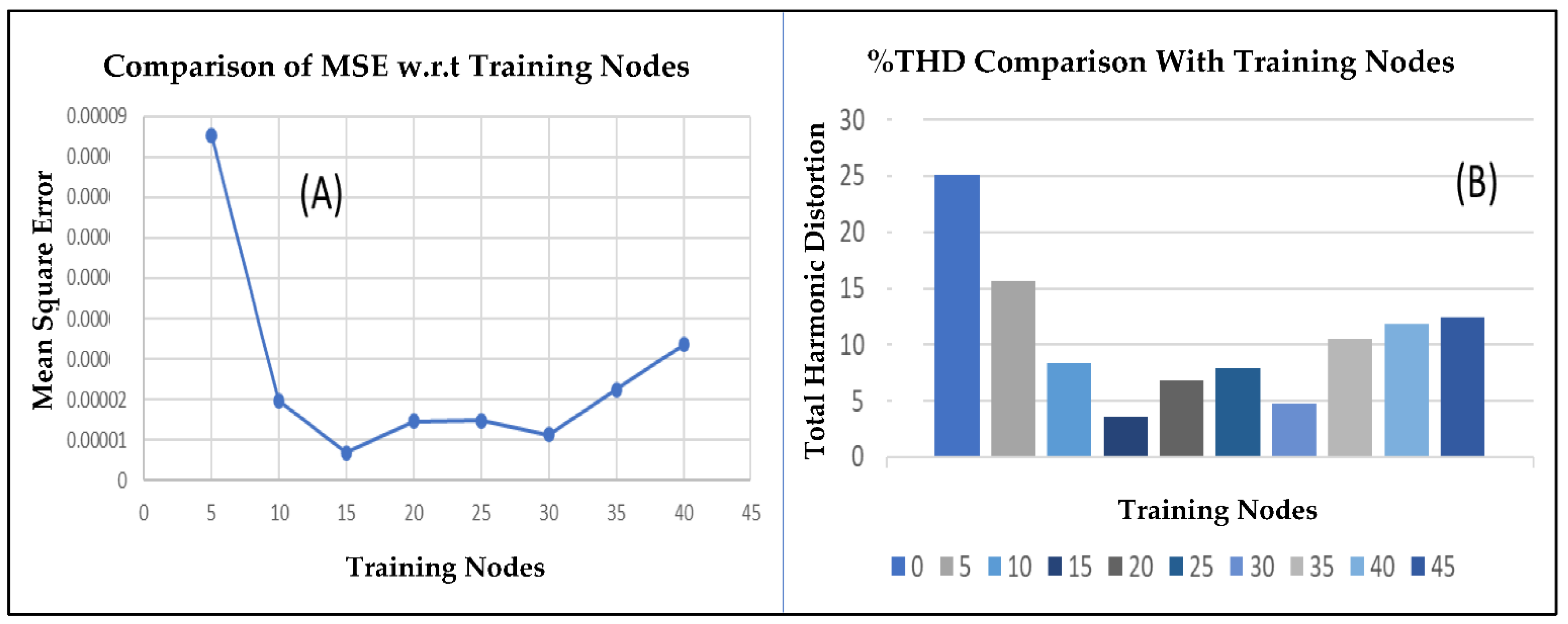
2.3.2. Selection of Nodes in Hidden Layers
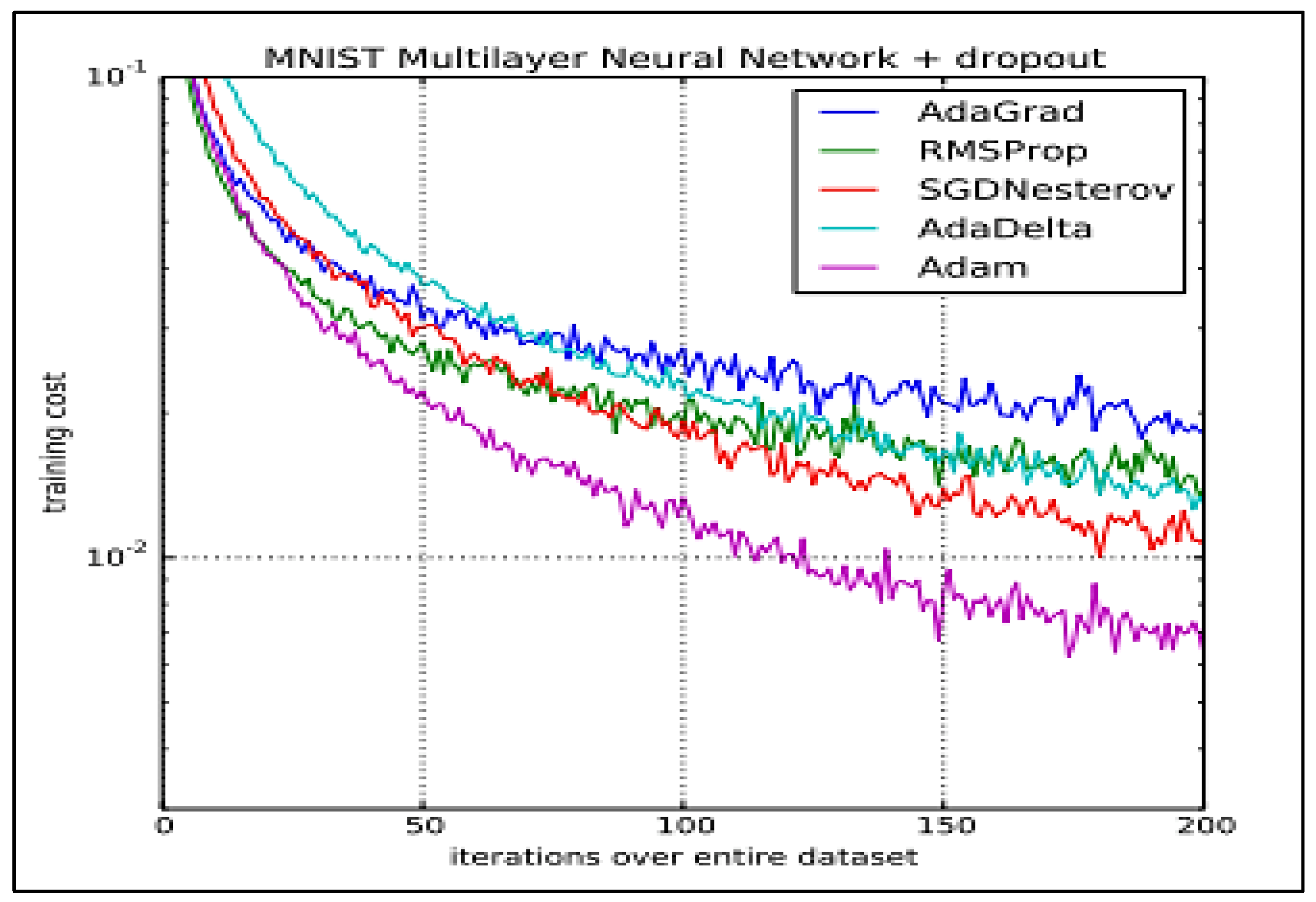
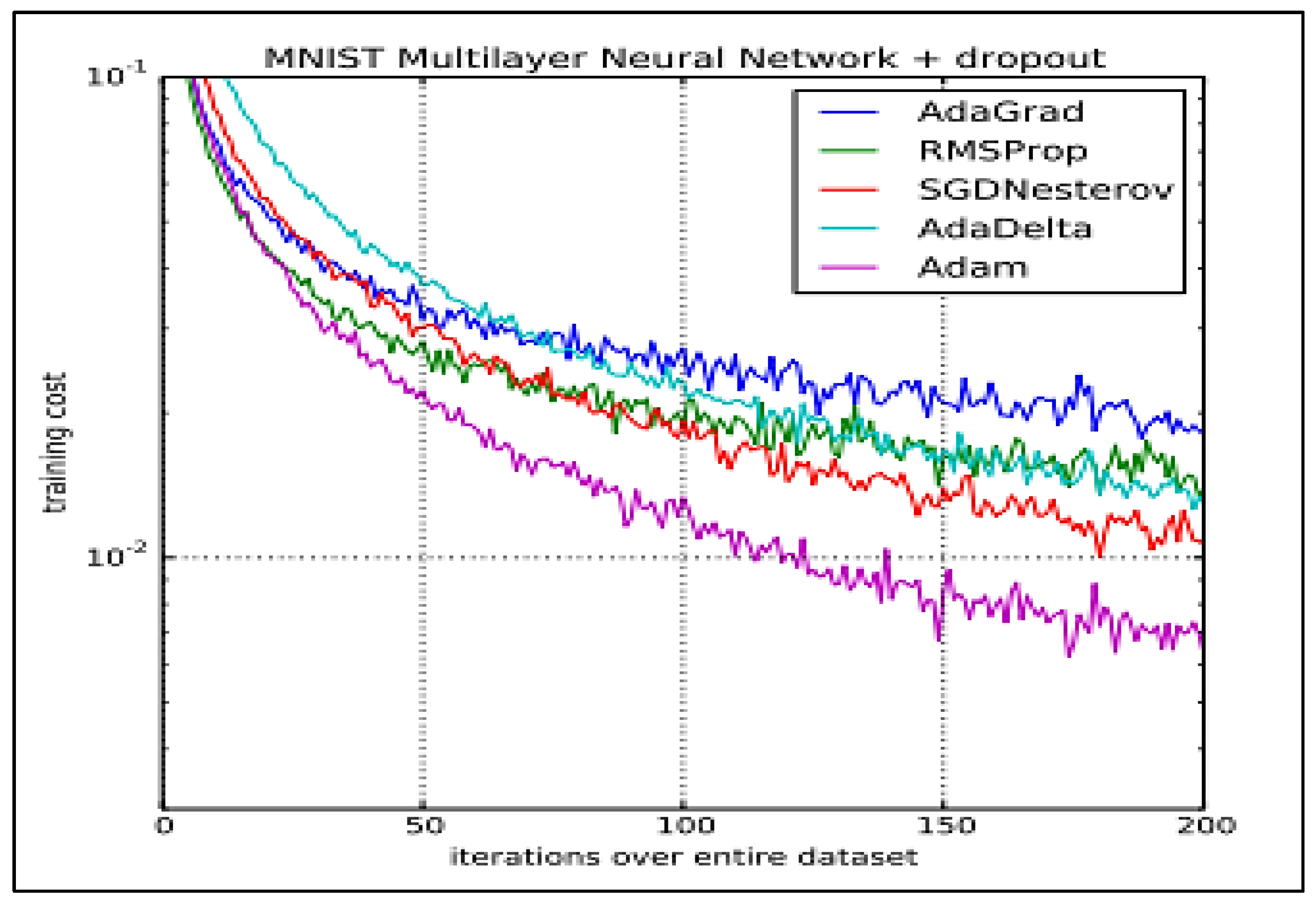
2.3.3. Selection of Optimal Optimizer
- ➢
- Adaptive Gradient Algorithm (AdaGrad)
- ➢
- Root Mean Square Propagation (RMSProp)
- Contents Providers (CP)s offer the data that is read/updated by users.
- Dissemination Operators (DO)s are accountable for the real data push. Moreover, CPs feed DOs together with the necessary distributed data.
- Mobile Support Stations (MSS)s are conventional that maintain bi-diirectional wireless communication along with wireless users.
- The dissemination Controller (DC) handles data to be distributed from the CPs and MSSs towards DOs.
3. Results and Findings
- ➢
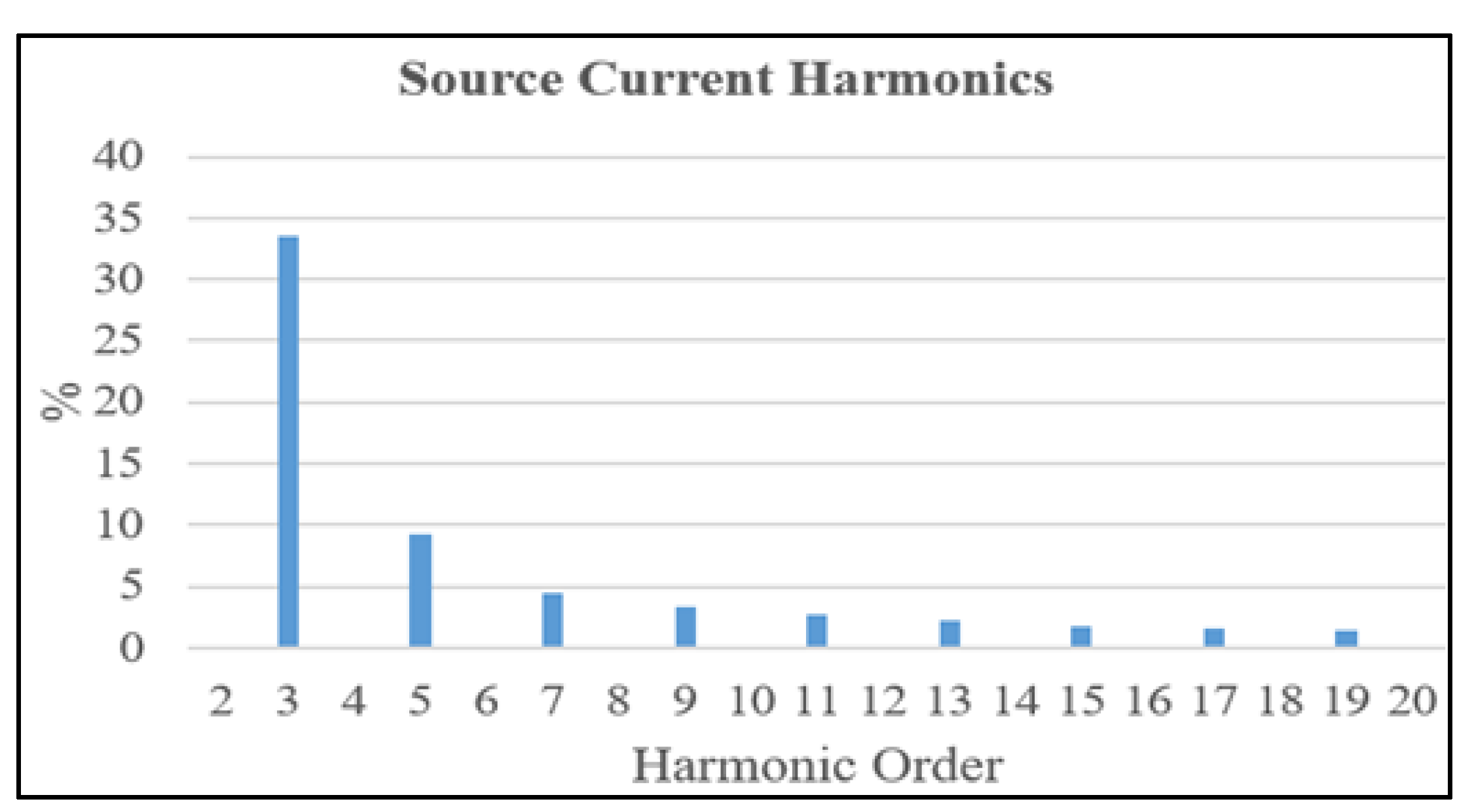
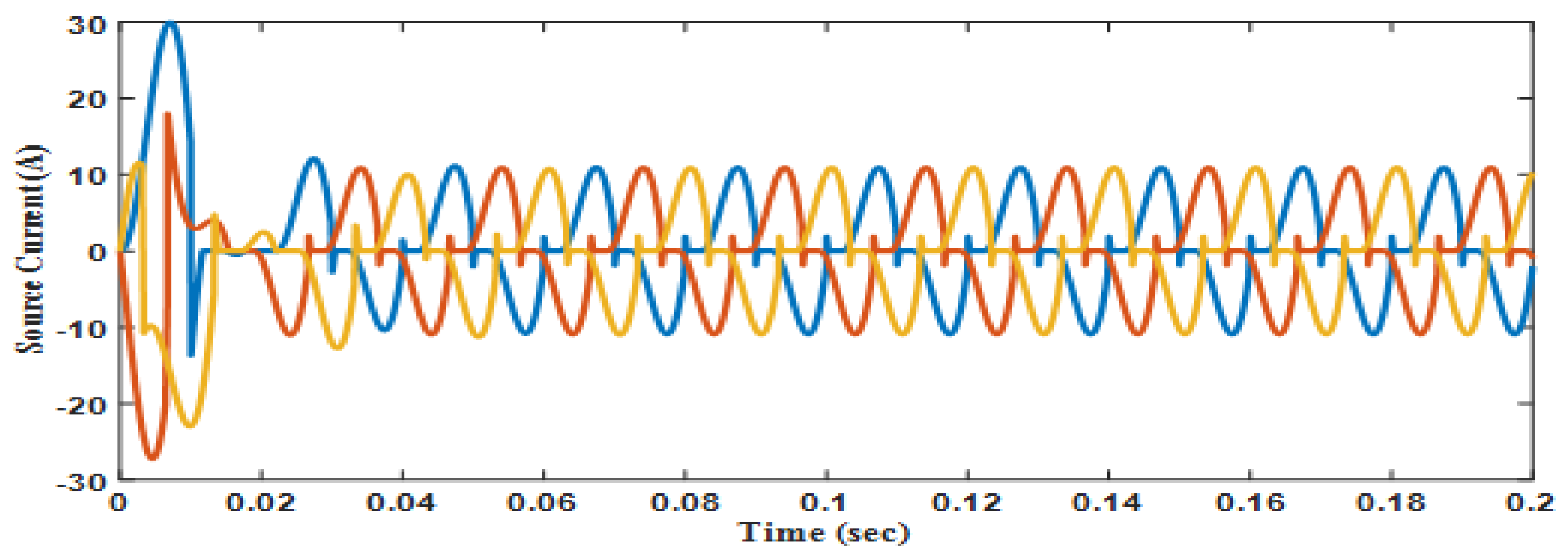
- An analysis of THD with the direct introduction of non-load without a filter has been performed.
- ➢
- In further, a simulation-based THD analysis for operational non-load with interleaving ANN-based hybrid filter has been presented.
- ➢
- A HIL-based THD analysis for operational non-linear load with interleaving ANN-based hybrid filter is performed.
- ➢
- Lastly, a comparative analysis has been performed.
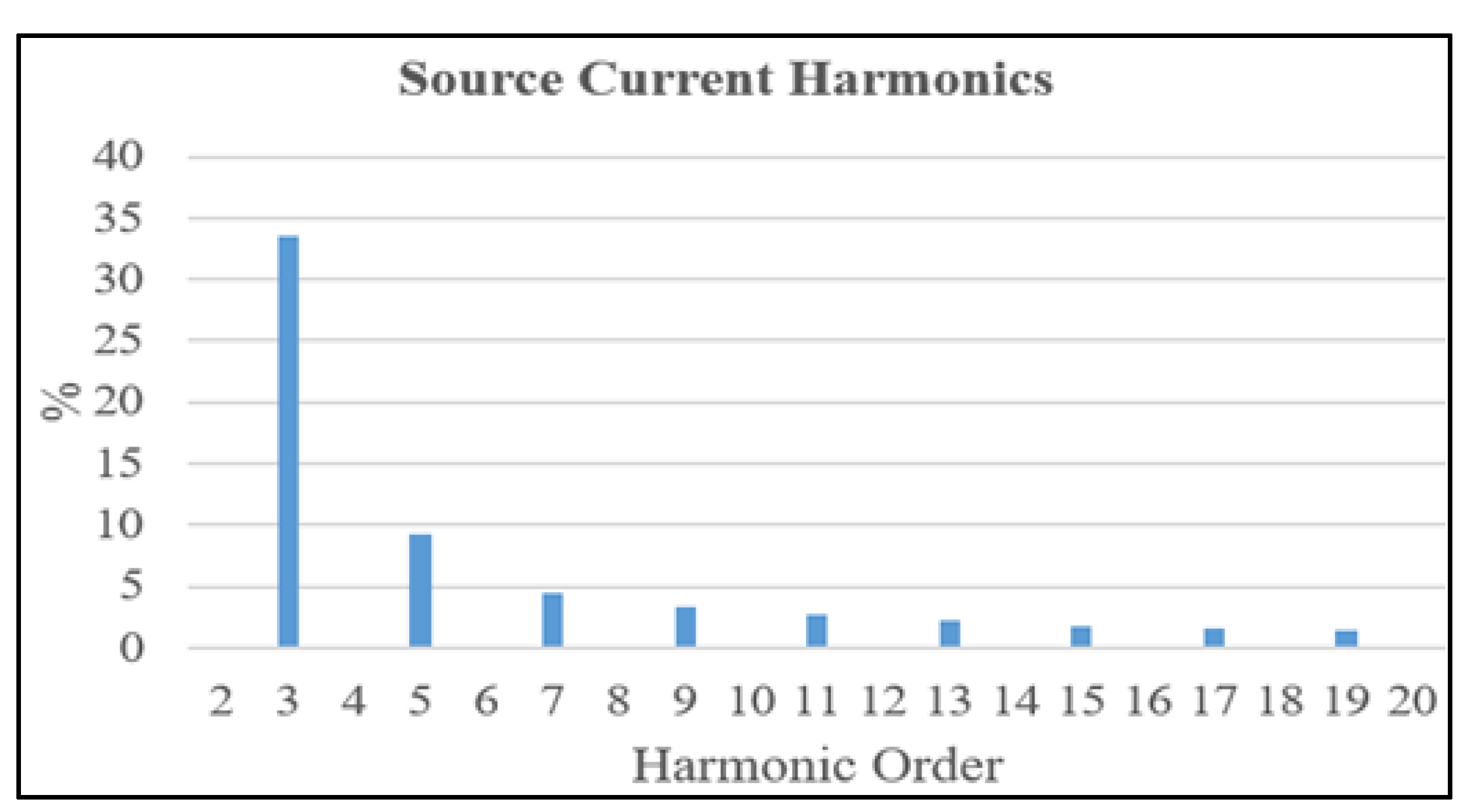
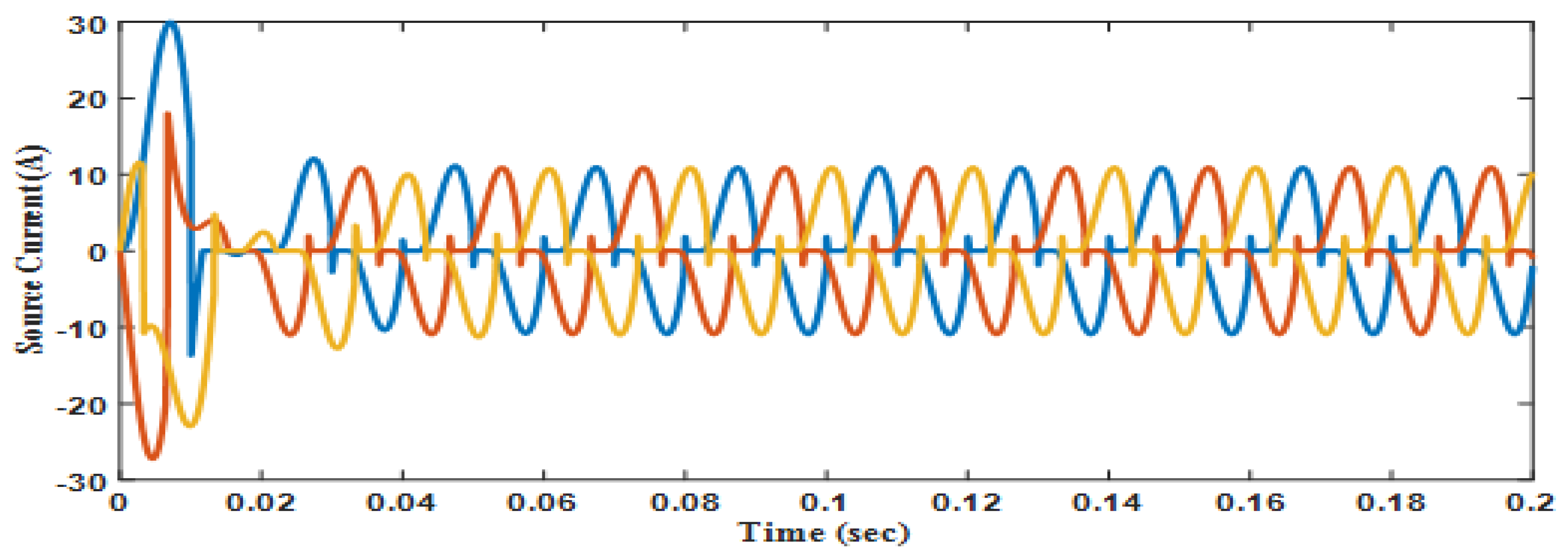
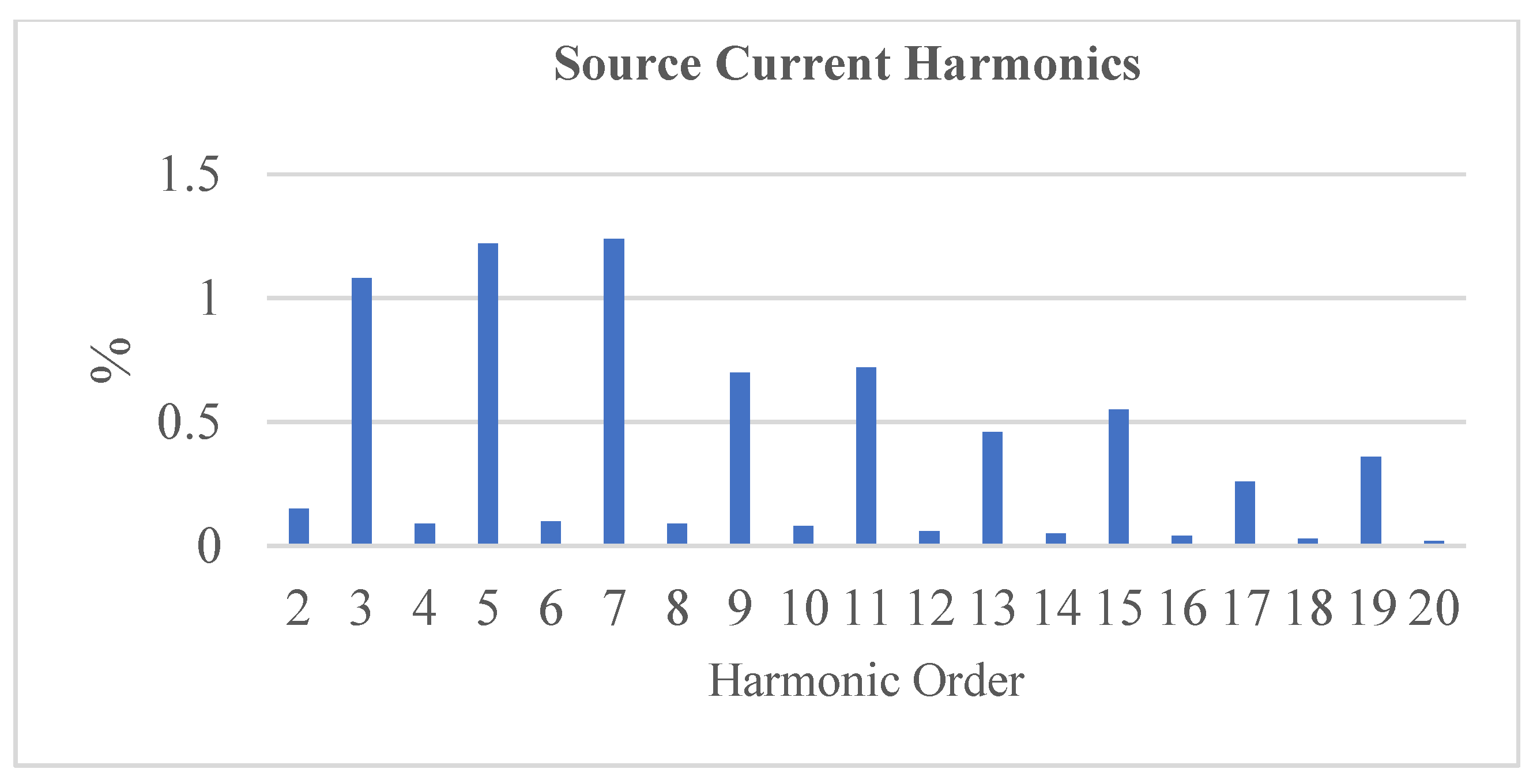
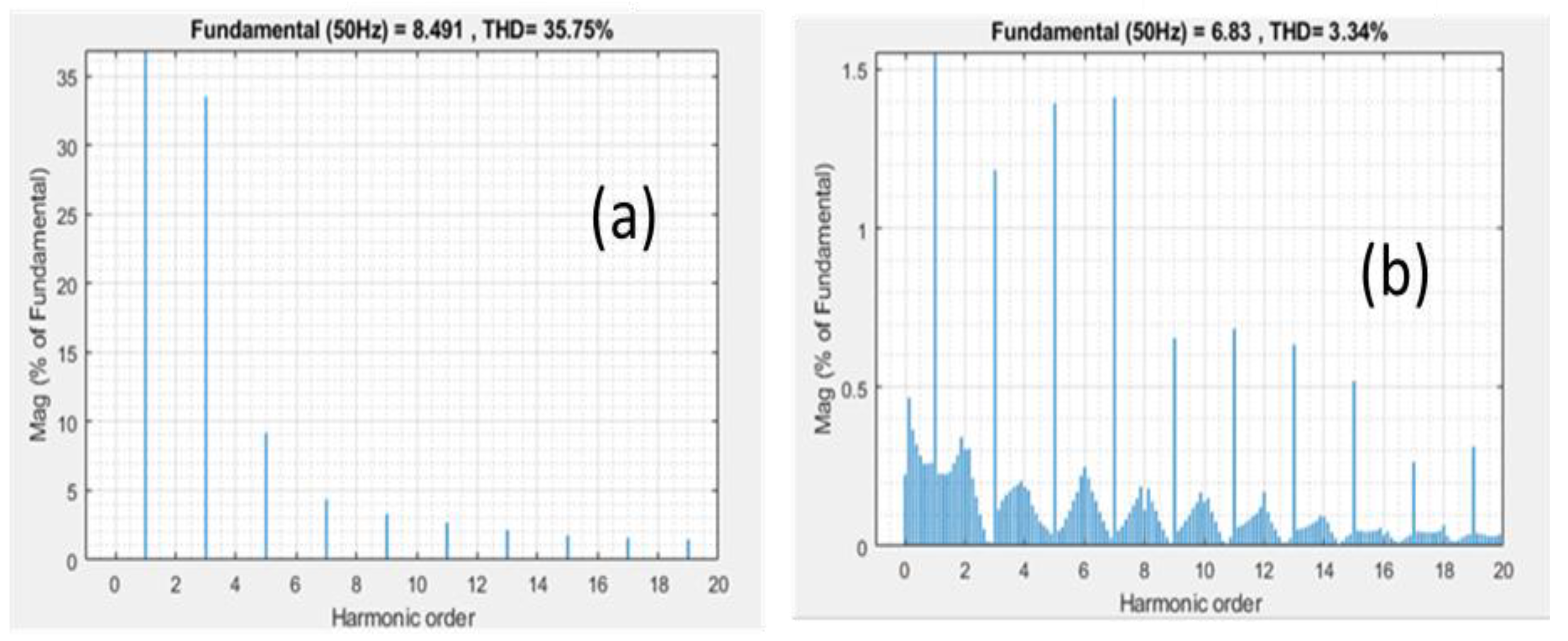
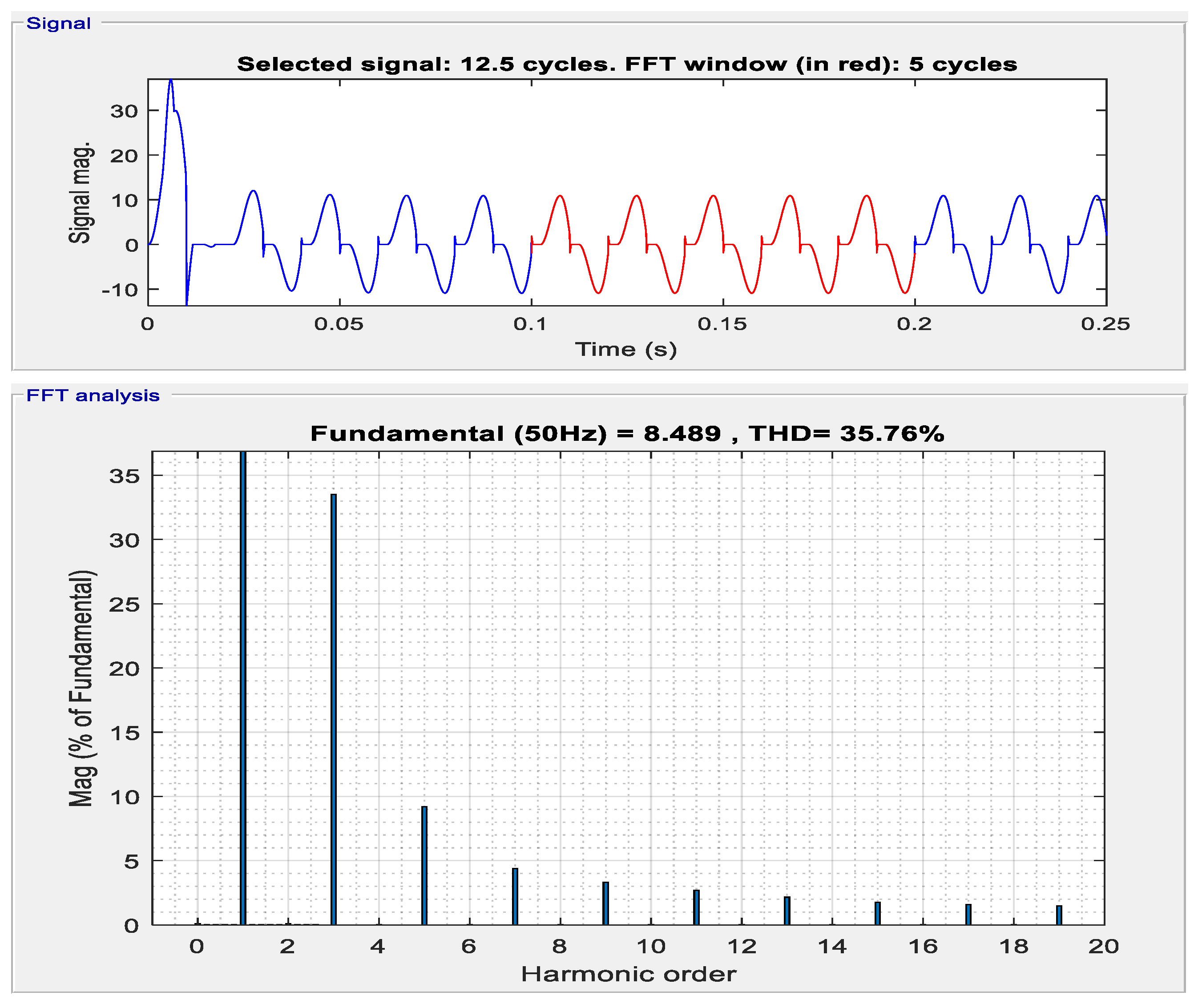
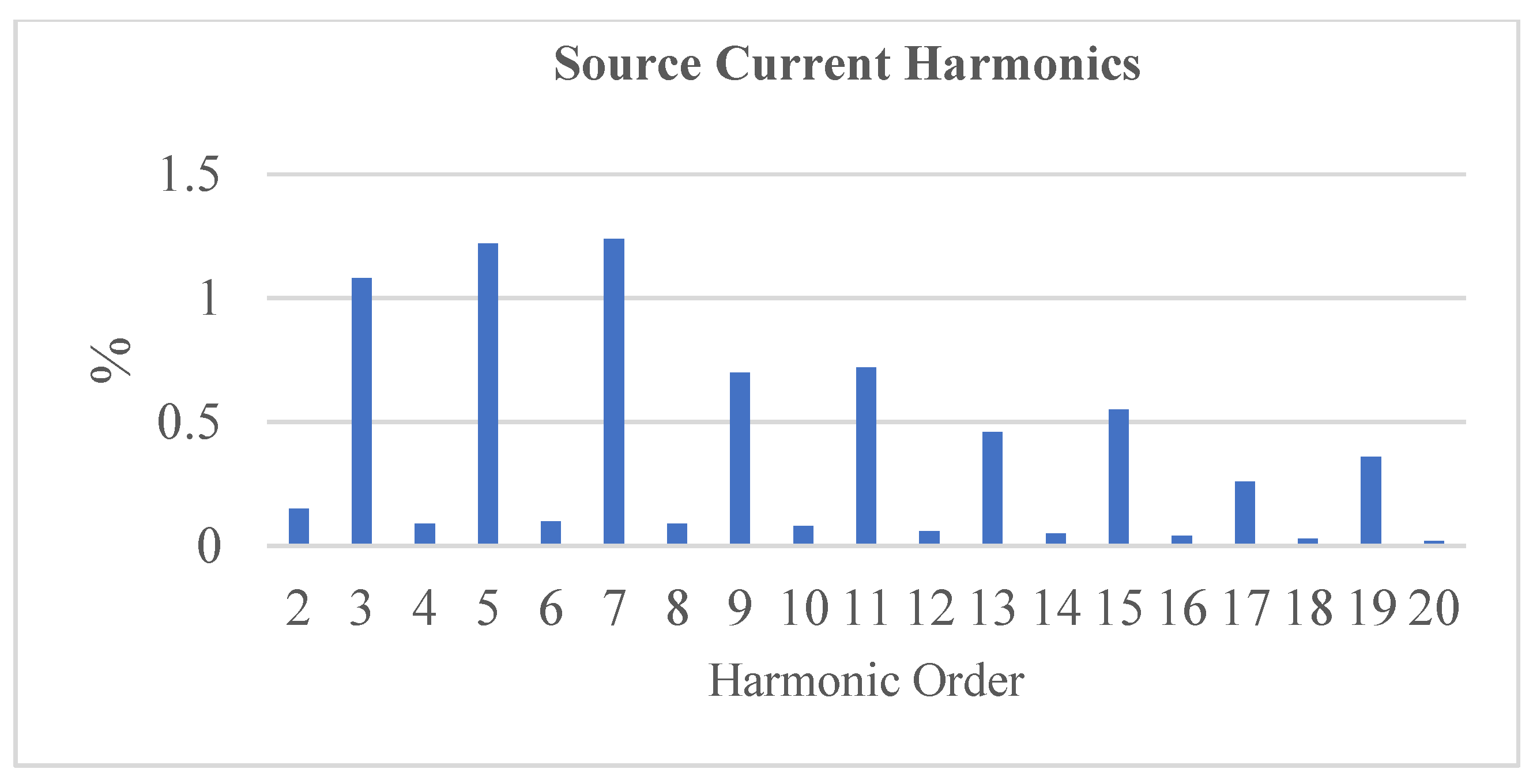
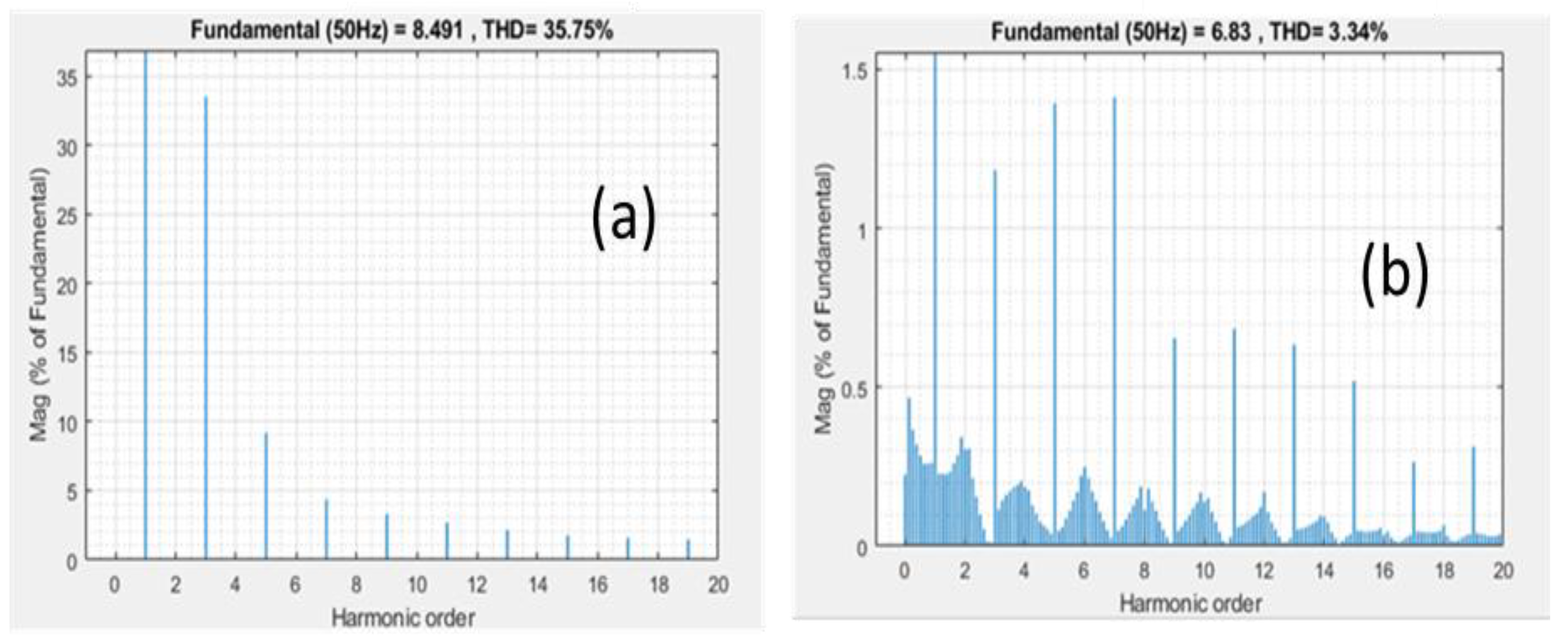
3.1. Analysis of THD with the Direct Introduction of Non-Load without a Filter
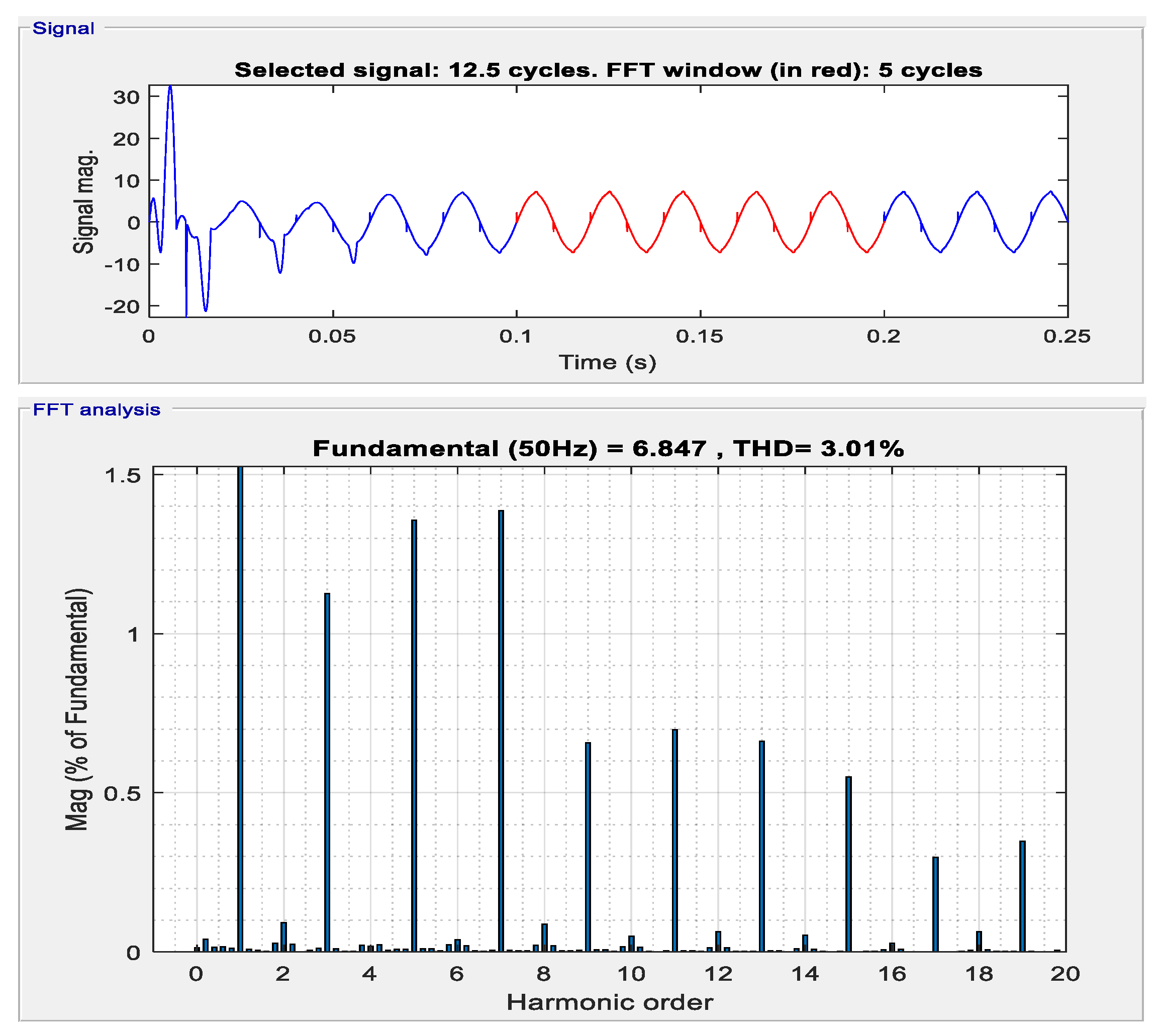
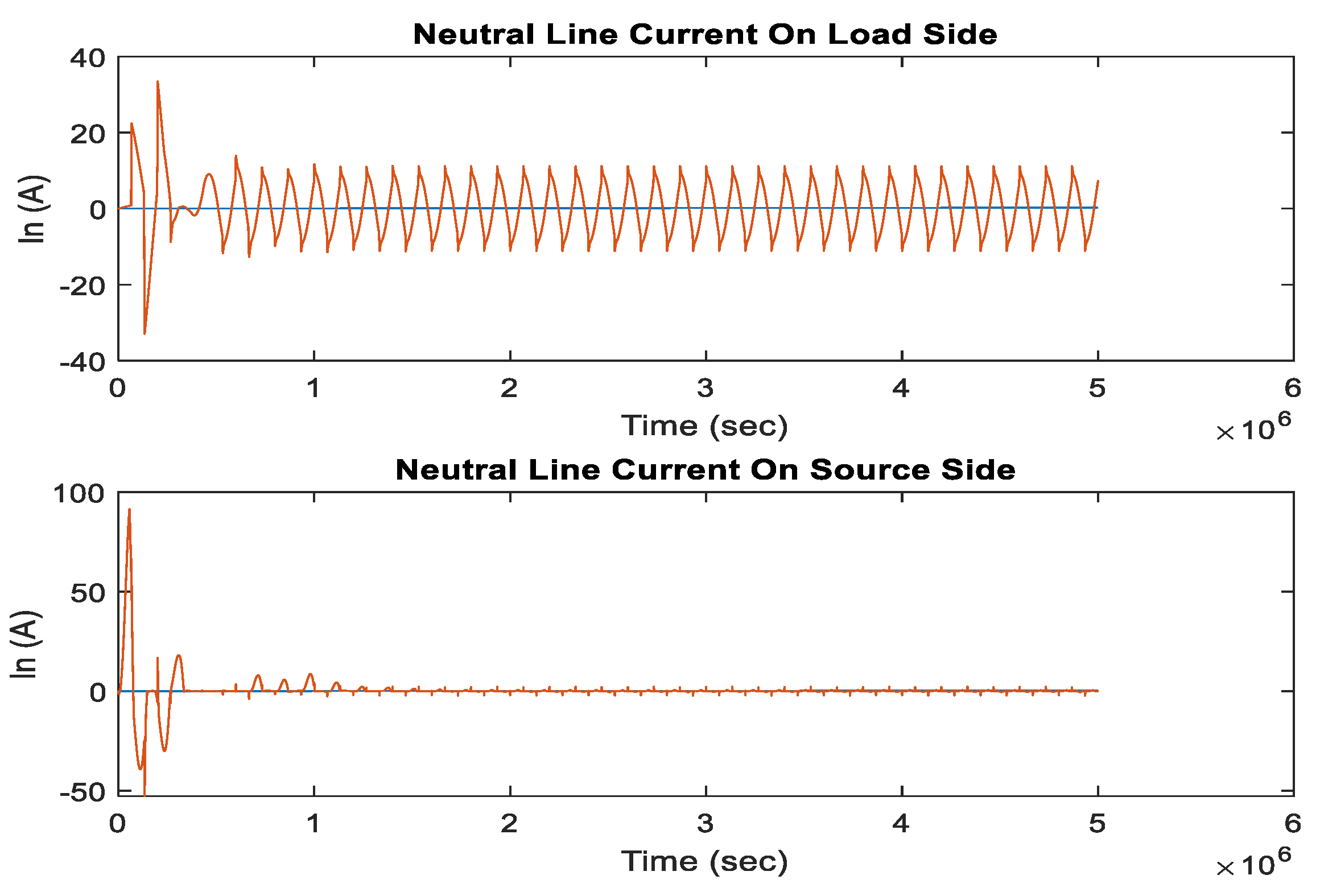
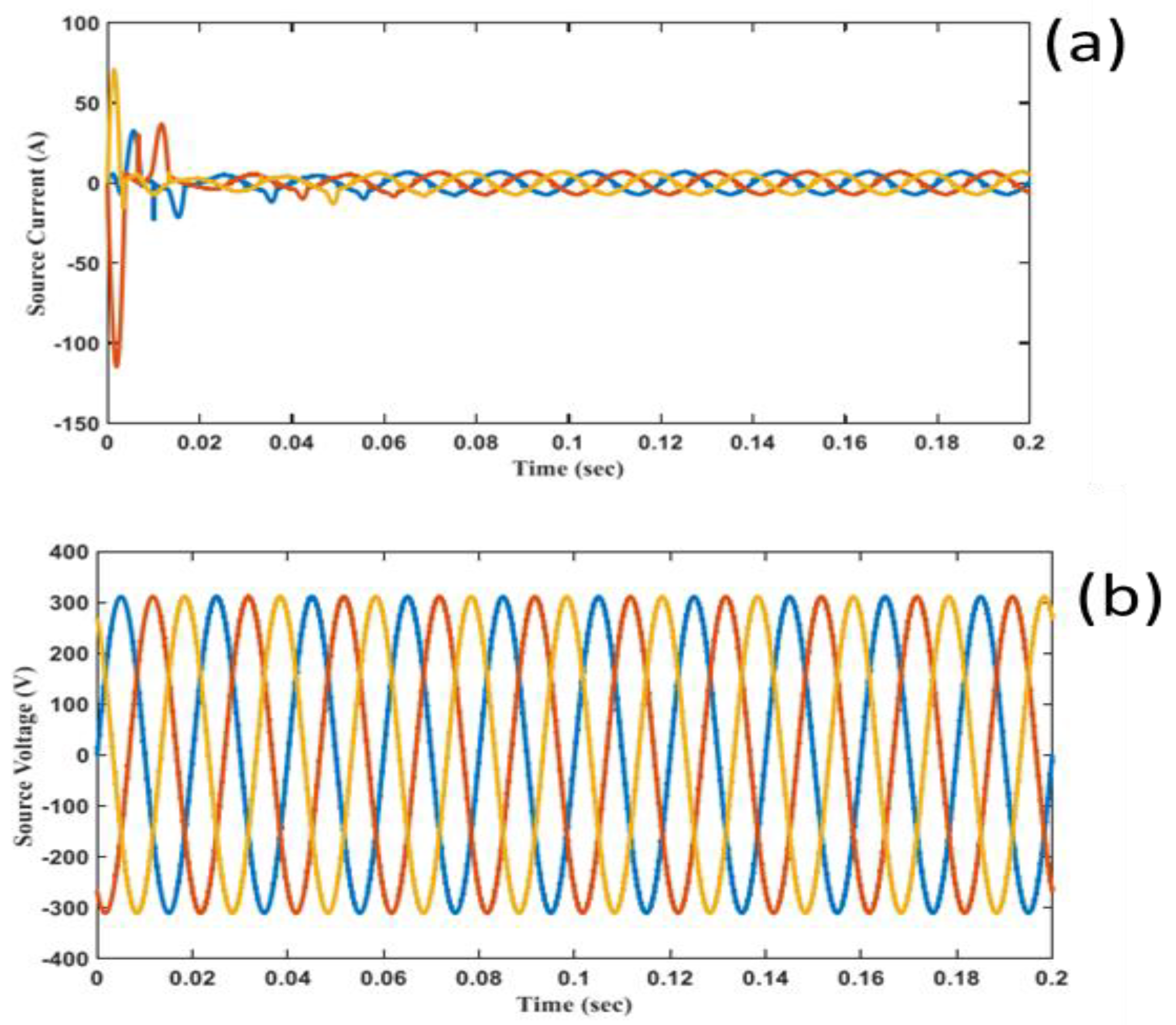
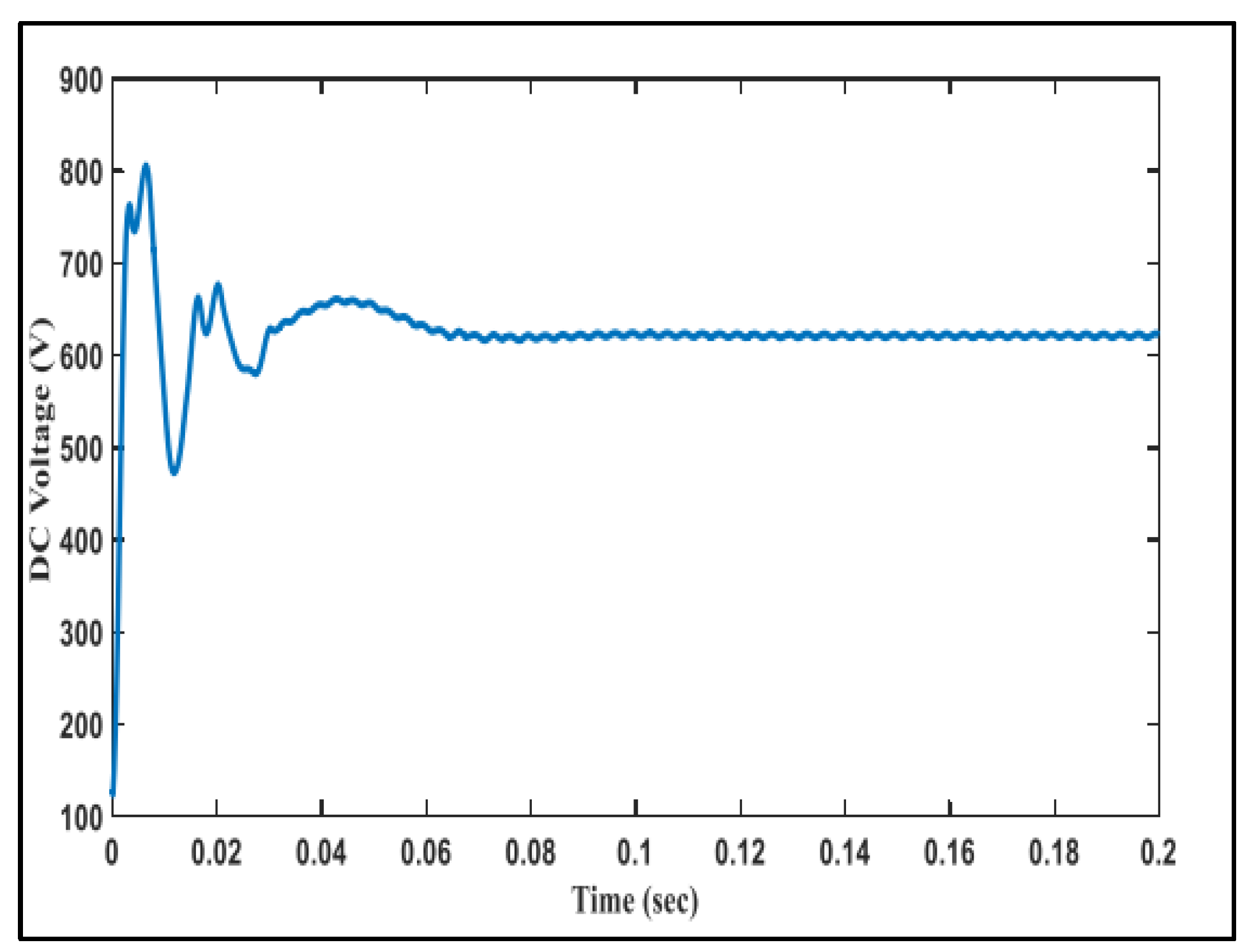
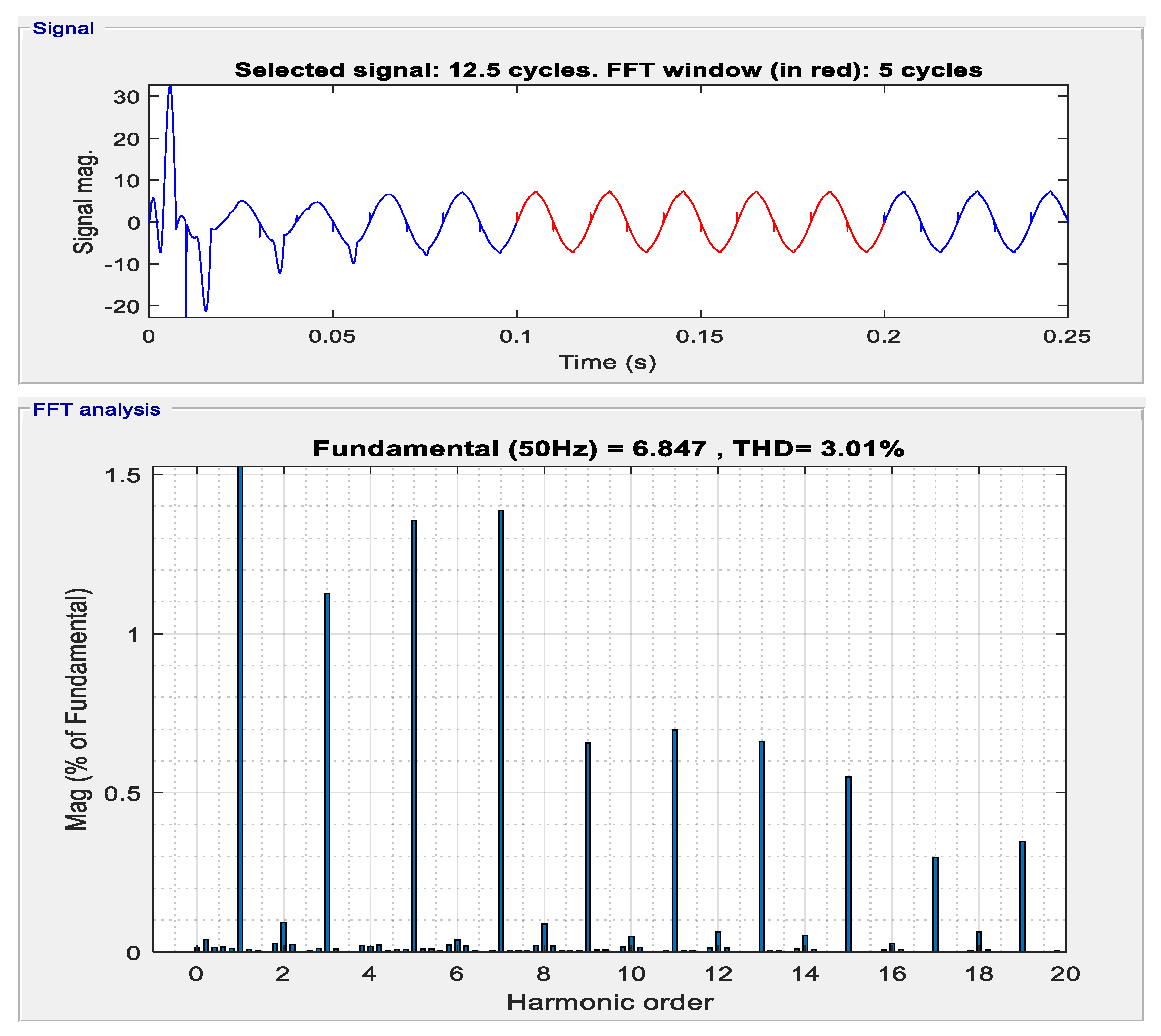
3.2. Simulation-Based THD Analysis for Operational Non-Load with Interleaving ANN Based Hybrid Filter
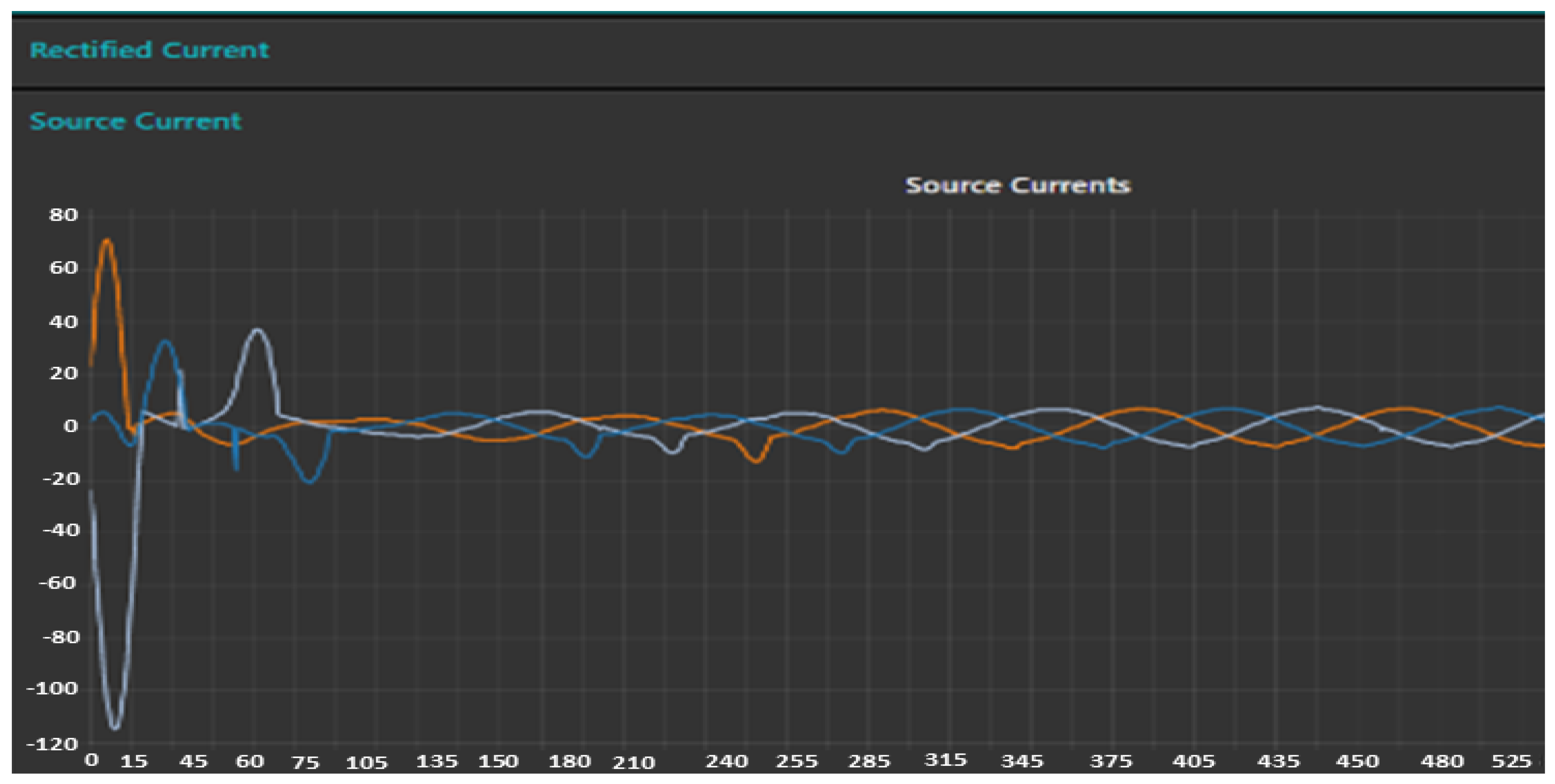
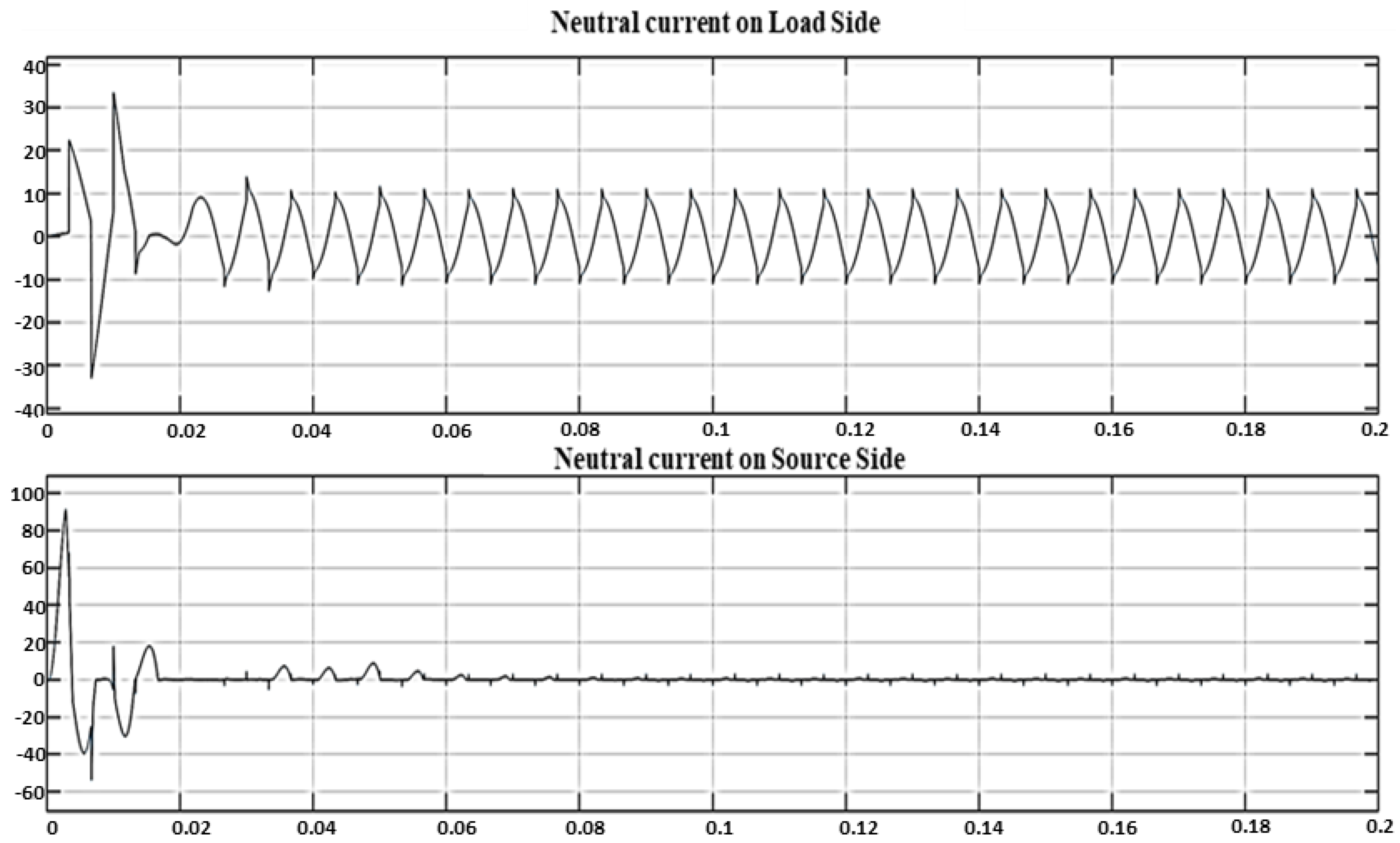
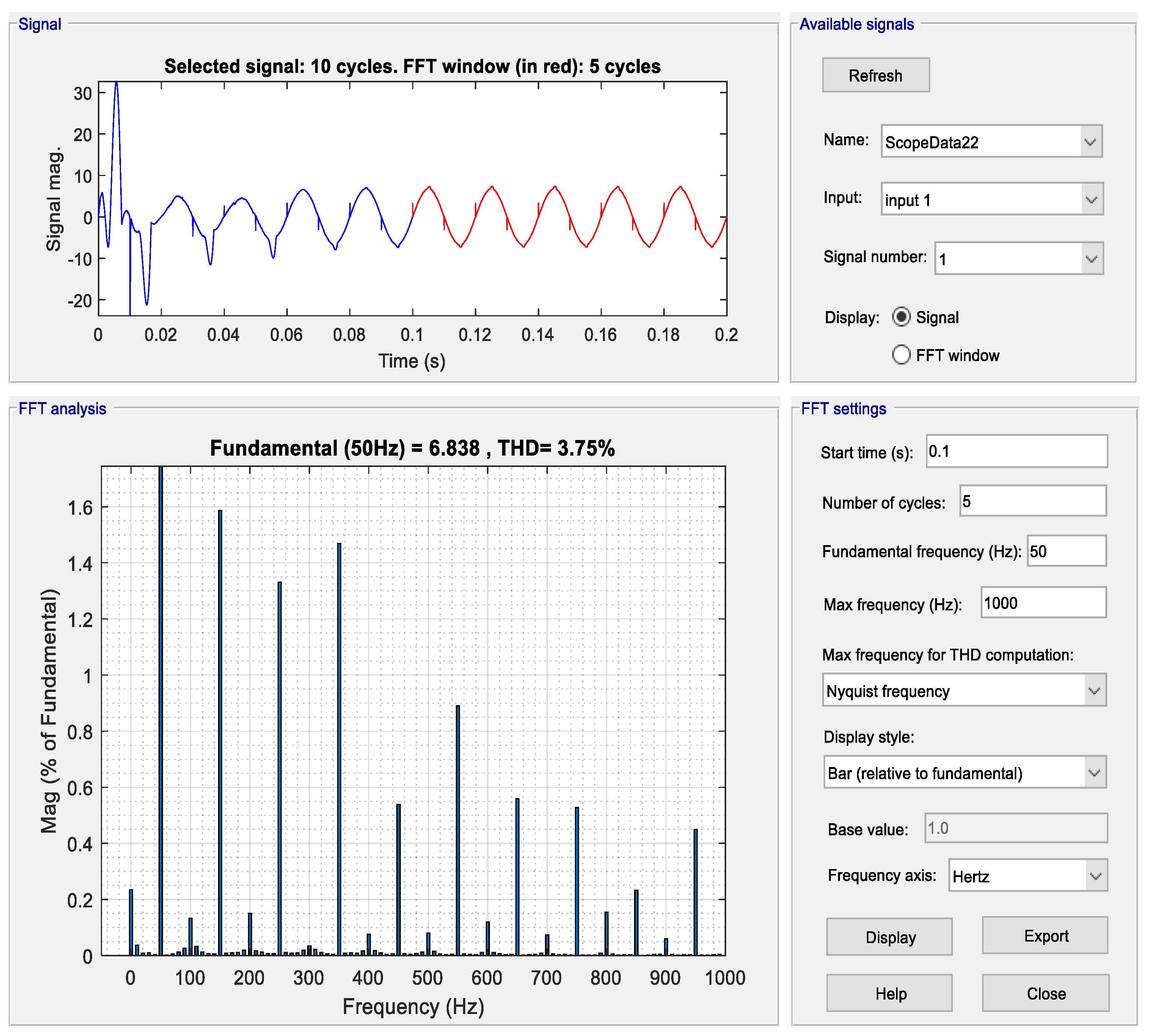
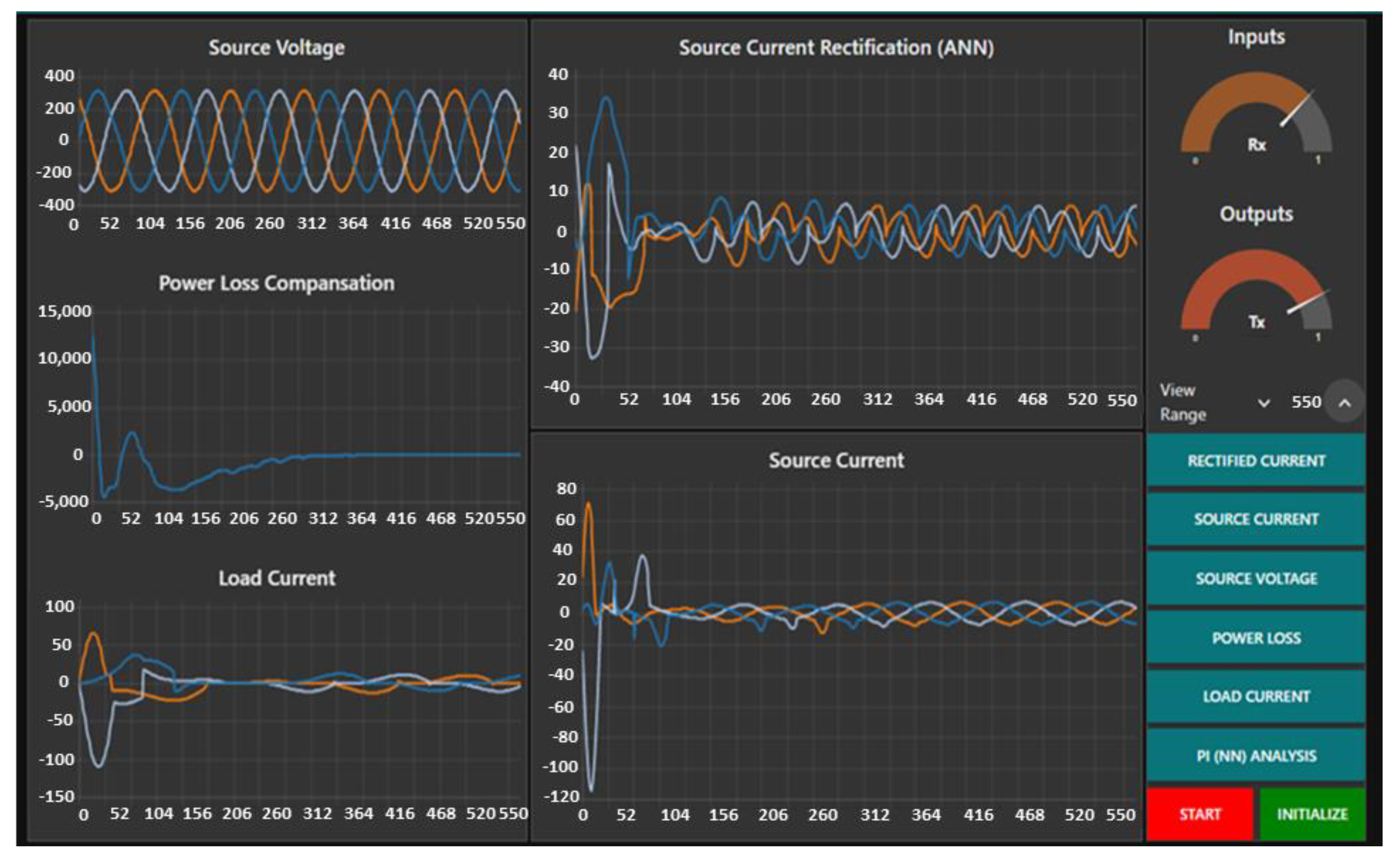
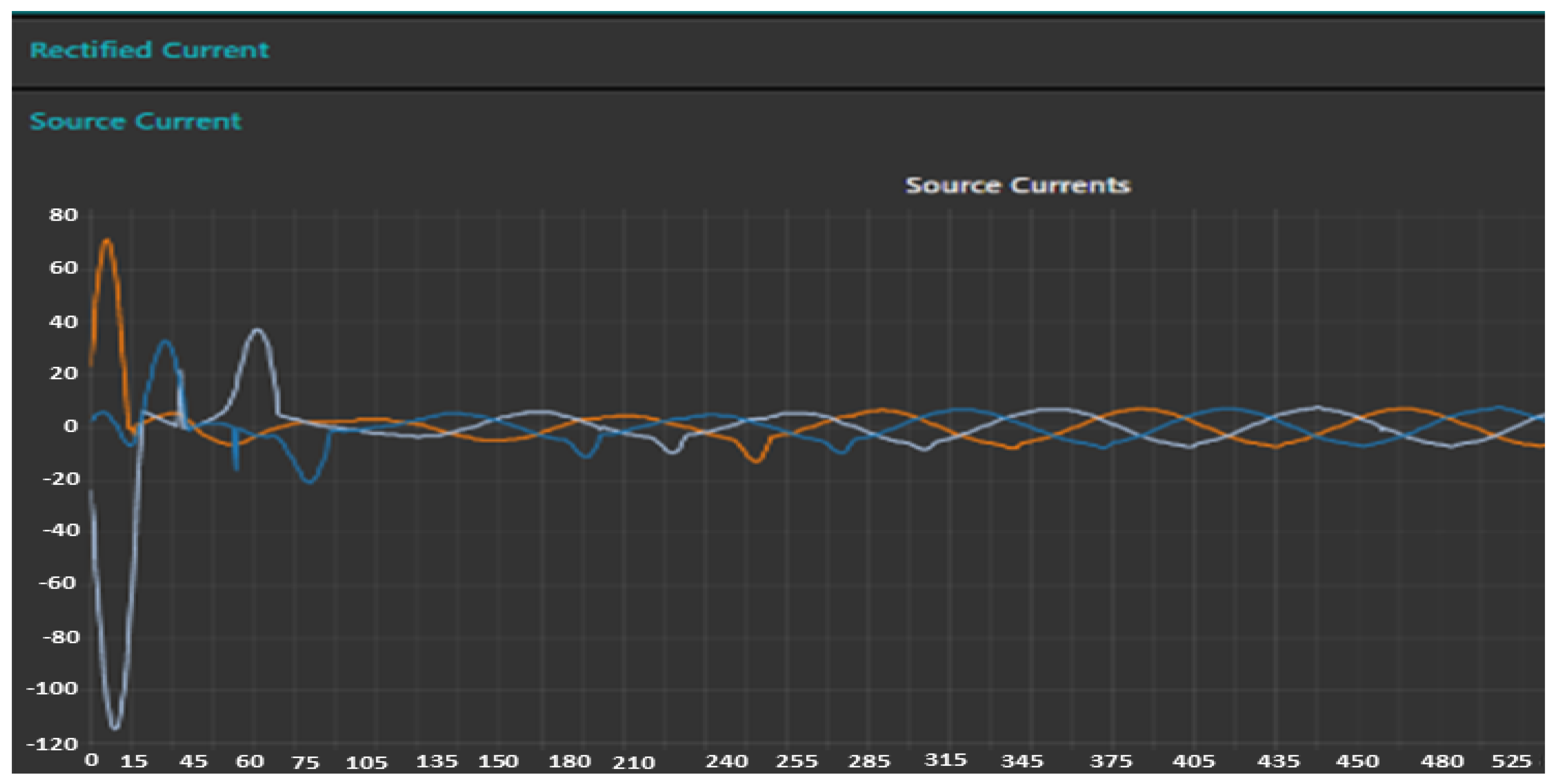
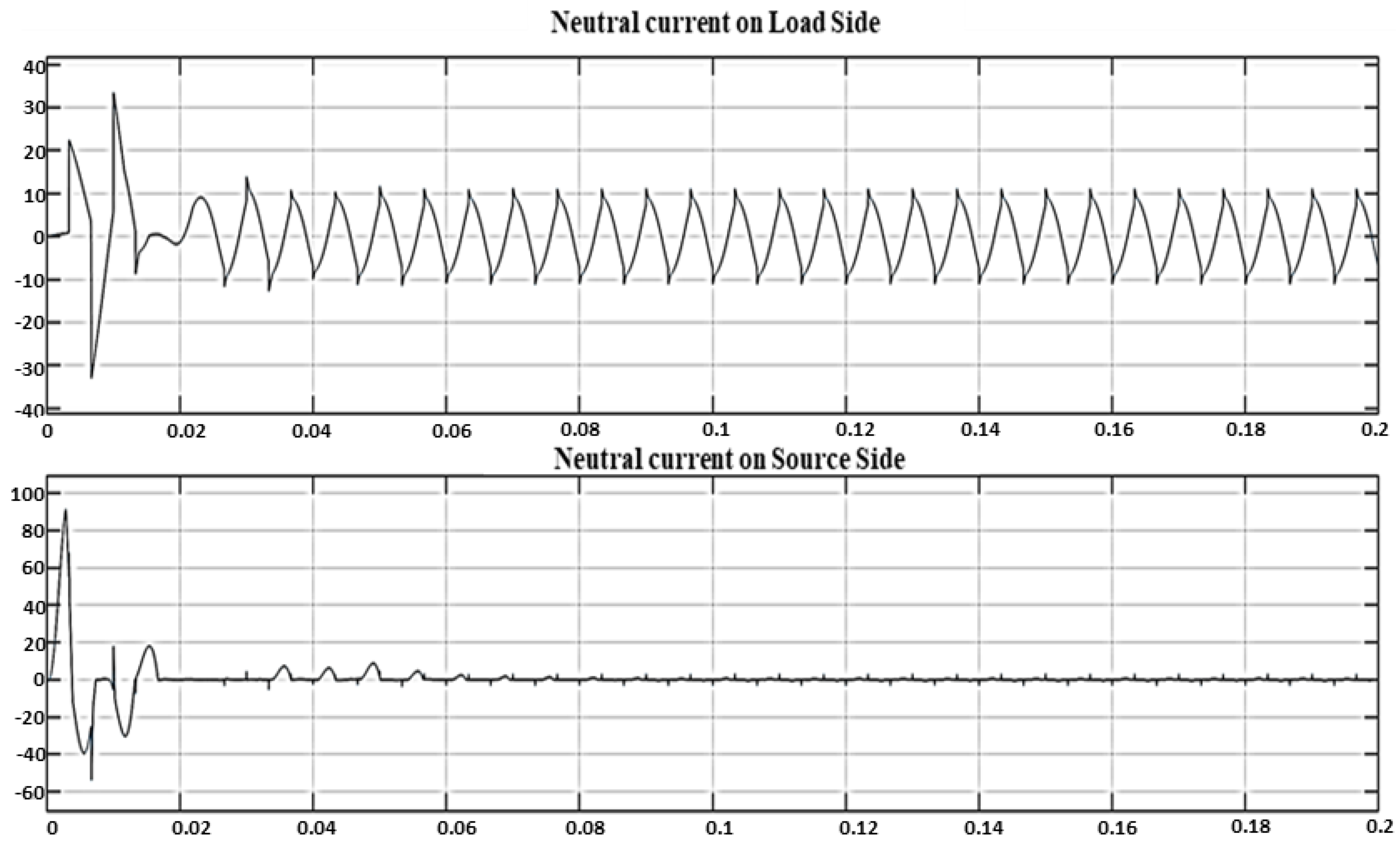
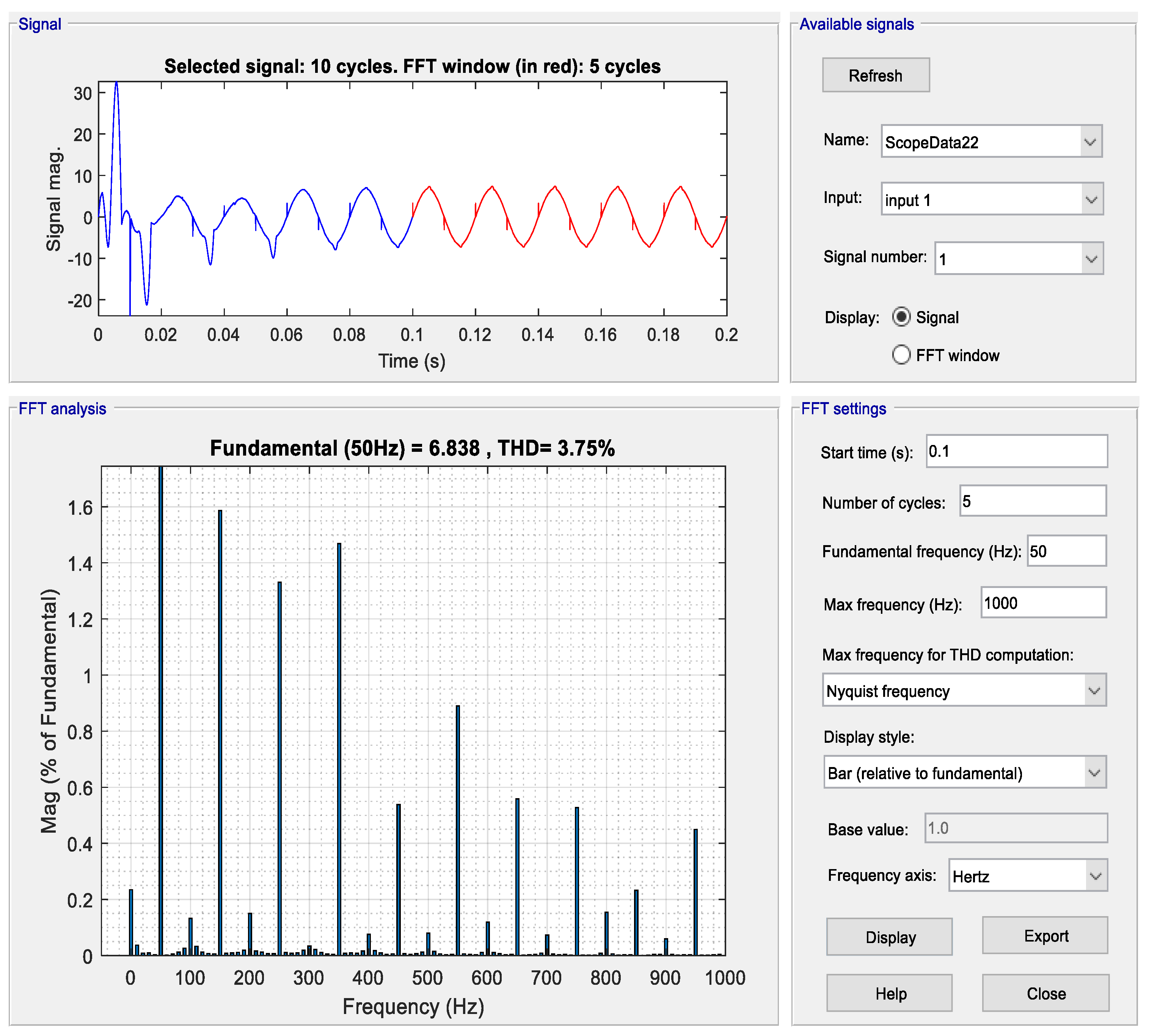
3.3. HIL-Based THD Analysis for Operational Non-Linear Load with Interleaving ANN-Based Hybrid Filter
4. Comparative Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zechariah, S.S. Hybrid Harmonic Filter for Electrical Power Systems. Ph.D. Dissertation, Tunku Abdul Rahman University College, Kuala Lumpur, Malaysia, 2019. [Google Scholar]
- Das, J. Passive Filters—Potentialities and Limitations. IEEE Trans. Ind. Appl. 2004, 40, 232–241. [Google Scholar] [CrossRef]
- Wang, Y.; Yong, J.; Sun, Y.; Xu, W.; Wong, D. Characteristics of Harmonic Distortions in Residential Distribution Systems. IEEE Trans. Power Deliv. 2017, 32, 1495–1504. [Google Scholar] [CrossRef]
- Haghdar, K.; Heidar, A.S. Selective harmonic elimination with optimal DC sources in multilevel inverters using generalized pattern search. IEEE Trans. Ind. Inform. 2018, 14, 3124–3131. [Google Scholar] [CrossRef]
- Dahidah, M.S.A.; Konstantinou, G.; Agelidis, V.G. A Review of Multilevel Selective Harmonic Elimination PWM: Formulations, Solving Algorithms, Implementation and Applications. IEEE Trans. Power Electron. 2015, 30, 4091–4106. [Google Scholar] [CrossRef]
- Singh, H.; Kour, M.; Thanki, D.V.; Kumar, P. A Review on Shunt Active Power Filter Control Strategies. Int. J. Eng. Technol. 2018, 7, 121–125. [Google Scholar] [CrossRef]
- Albatsh, F.M.; Hassan, M.; Ahmad, S.; Mekhilef, S.; Mokhlis, H. D-Q model of Fuzzy based UPFC to control power flow in transmission network. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 5–13. [Google Scholar]
- Diab, M.; El-Habrouk, M.; Abdelhamid, T.H.; Deghedie, S. Survey of Active Power Filters Configurations. In Proceedings of the 2018 IEEE International Conference on System, Computation, Automation and Networking (ICSCA), Pondicherry, India, 6–7 July 2018; pp. 1–14. [Google Scholar]
- Kalair, A.; Abas, N.; Kalair, A.R.; Saleem, Z.; Khan, N. Review of harmonic analysis, modeling and mitigation techniques. Renew. Sustain. Energy Rev. 2017, 78, 1152–1187. [Google Scholar] [CrossRef]
- Lin, X.; Xia Hou, K.; Liu, Y.; Wu, Q.H. Design and Hardware-in-the-Loop Experiment of Multiloop Adaptive Control for DFIG-WT. IEEE Trans. Ind. Electron. 2018, 65, 7049–7059. [Google Scholar] [CrossRef]
- Noshahr, J.; Mehdi, B.; Mostafa, K. The Estimation of the Influence of Each Harmonic Component in Load Unbalance of Distribution Transformers in Harmonic Loading Condition. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–6. [Google Scholar]
- Soomro, D.M.; Soo, C.C.; Zubair, A.M.; Mohammad, A.U.; Farhan, A. Per-formance of shunt active power filter based on instantaneous reactive power control theory for single-phase system. Int. J. Renew. Energy Res. (IJRER) 2017, 7, 1741–1751. [Google Scholar]
- Gali, V.; Nitin, G.; Gupta, R.A. Enhanced Particle Swarm Optimization Technique for Interleaved Inverter Tied Shunt Active Power Filter. In Soft Computing for Problem Solving; Springer: Singapore, 2019; pp. 571–583. [Google Scholar]
- Madhu, M.B.; Mn, D.; Bm, R. Design of shunt hybrid active power filter (SHAPF) to reduce harmonics in AC side due to Non-linear loads. Int. J. Power Electron. Drive Syst. (IJPEDS) 2018, 9, 1926–1936. [Google Scholar] [CrossRef]
- Fang, Y.; Fei, J.; Ma, K. Model reference adaptive sliding mode control using RBF neural network for active power filter. Int. J. Electr. Power Energy Syst. 2015, 73, 249–258. [Google Scholar] [CrossRef]
- Agrawal, S.; Prakash, K.; Palwalia, D.K. Artificial neural network based three phase shunt active power filter. In Proceedings of the 2016 IEEE 7th Power India International Conference (PIICON), Bikaner, India, 25–27 November 2016; pp. 1–6. [Google Scholar]
- Singh, S.K.; Arup, K.G.; Nidul, S. Power system harmonic parameter estimation using bi-linear recursive least square (BRLS) algorithm. Int. J. Electr. Power Energy Syst. 2015, 67, 1–10. [Google Scholar] [CrossRef]
- Li, H.; Gole, A.M.; Ho, C.N.M. Controller Implementation and Performance Evaluation of a High Power Three-Phase Active Power Filter using Controller Hardware-in-the-Loop Simulation. In Proceedings of the 2018 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 10–11 October 2018; pp. 1–6. [Google Scholar]
- Fabricio, E.L.L.; Junior, S.C.S.; Jacobina, C.B.; Correa, M.B.D.R. Analysis of Main Topologies of Shunt Active Power Filters Applied to Four-Wire Systems. IEEE Trans. Power Electron. 2018, 33, 2100–2112. [Google Scholar] [CrossRef]
- Khan, A.; Hussain, M.; Javed, Y.; Arshad, J.; Rehman, A.; Khan, R.; Bajaj, M.; Kaabar, M.K.A. Hardware-in-the-Loop Implementation and Performance Evaluation of Three-phase Hybrid Shunt Active Power Filter for Power Quality Improvement. Math. Probl. Eng. 2021, 2021, 1–23. [Google Scholar] [CrossRef]
- Asif, R.M.; Rehman, A.U.; Rehman, S.U.; Arshad, J.; Hamid, J.; Sadiq, M.T.; Tahir, S. Design and analysis of robust fuzzy logic maximum power point tracking based isolated photovoltaic energy system. Eng. Rep. 2020, 2, 12234. [Google Scholar] [CrossRef]
- Manoharsha, M.; Babu, B.; Veeresham, K.; Kapoor, R. ANN based Selective Harmonic Elimination for Cascaded H-Brdige Multilevel Inverter. In Proceedings of the 2021 7th International Conference on Electrical Energy Systems (ICEES), Chennai, India, 11–13 February 2021; pp. 183–188. [Google Scholar]
- Ata, R. RETRACTED: Artificial neural networks applications in wind energy systems: A review. Renew. Sustain. Energy Rev. 2015, 49, 534–562. [Google Scholar] [CrossRef]
- Bouyakoub, I.; Taleb, R.; Mellah, H.; Zerglaine, A. Implementation of space vector modulation for two level Three-phase inverter using dSPACE DS1104. Indones. J. Electr. Eng. Comput. Sci. 2020, 20, 744–751. [Google Scholar] [CrossRef]
- Herman, L.; Bozicek, A.; Blažič, B.; Papic, I. Real-time simulations of a parallel hybrid active filter with hardware-in-the-loop. In Proceedings of the 2014 16th International Conference on Harmonics and Quality of Power (ICHQP), Bucharest, Romania, 25–28 May 2014; pp. 576–580. [Google Scholar]
- Zou, Z.-X.; Zhou, K.; Wang, Z.; Cheng, M. Frequency-Adaptive Fractional-Order Repetitive Control of Shunt Active Power Filters. IEEE Trans. Ind. Electron. 2015, 62, 1659–1668. [Google Scholar] [CrossRef]
- Chawda, G.S.; Shaik, A.G. Performance Evaluation of Adaline Controlled Dstatcom for Multifarious Load in Weak AC Grid. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 356–361. [Google Scholar]
- Zellouma, L.; Boualaga, R.; Abdelbasset, K.; Amar, B.; Benkhoris, M.F. Simulation and real time im-plementation of three phase four wire shunt active power filter based on sliding mode controller. Rev. Roum. Des. Sci. Technol. Ser. Electrotech. Energy 2018, 63, 77–82. [Google Scholar]
- Mikkili, S.; Panda, A.K. Instantaneous Active and Reactive Power and Current Strategies for Current harmonics cancellation in 3-ph 4wire SHAF With both PI and Fuzzy Controllers. Energy Power Eng. 2011, 3, 285–298. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Wang, T.; Pan, W.; Ding, X.; Gong, J. A comprehensive review of improving power quality using active power filters. Electr. Power Syst. Res. 2021, 199, 107389. [Google Scholar] [CrossRef]
- Karthikeyan, M.; Sharmilee, K.; Balasubramaniam, P.; Prakash, N.; Babu, M.R.; Subramaniyaswamy, V.; Sudhakar, S. Design and implementation of ANN-based SAPF approach for current harmonics mitigation in industrial power systems. Microprocess. Microsyst. 2020, 77, 103194. [Google Scholar] [CrossRef]
- Siregar, S.P.; Wanto, A. Analysis of Artificial Neural Network Accuracy Using Backpropagation Algorithm In Predicting Process (Forecasting). Int. J. Inf. Syst. Technol. 2017, 1, 34–42. [Google Scholar] [CrossRef] [Green Version]
- Moeini, A.; Dabbaghjamanesh, M.; Kimball, J.W.; Zhang, J. Artificial Neural Networks for Asymmetric Selective Harmonic Current Mitigation-PWM in Active Power Filters to Meet Power Quality Standards. IEEE Trans. Ind. Appl. 2020, 1. [Google Scholar] [CrossRef]
- Kim, S.-B.; Sok, V.; Kang, S.-H.; Lee, N.-H.; Nam, S.-R.; Kim, S.; Kang, L.N. A Study on Deep Neural Network-Based DC Offset Removal for Phase Estimation in Power Systems. Energies 2019, 12, 1619. [Google Scholar] [CrossRef] [Green Version]
- Singh, D.; Singh, M.; Hakimjon, Z. Requirements of MATLAB/Simulink for signals. In Signal Processing Applications Using Multidimensional Polynomial Splines; Springer: Singapore, 2019; pp. 47–54. [Google Scholar]
- Toc, S.-I.; Korodi, A. Modbus-OPC UA Wrapper Using Node-RED and IoT-2040 with Application in the Water Industry. In Proceedings of the 2018 IEEE 16th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 13–15 September 2018; pp. 99–104. [Google Scholar]
- Al Mogren, A.S. The integration of telecommunication and dissemination networks. Int. J. Commun. Netw. Distrib. Syst. 2010, 4, 331. [Google Scholar] [CrossRef]
- Yang, K.; Hao, J.; Wang, Y. Switching angles generation for selective harmonic elimination by using artificial neural networks and quasi-newton algorithm. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–5. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Number | Contribution | Implemented Technique |
|---|---|---|
| [24] | To compensate harmonic current & components of reactive power, the DC-AC the converter is injected in parallel with the grid. | SRF-PLL was implemented as a control algorithm. HIL using dSPACE |
| [25] | Briefly summarizes Real-time digital simulations and their control techniques. | RTDS, eMEGAsim, HYPERSIM, and VTB are discussed in detail. |
| [26] | 3-phase, 2-level VSC attached in parallel through single tuned passive filter for HIL testing. | RTDS implementation for HIL testing of Hybrid Active filter. |
| [27] | To verify the results obtained through the simulations. | ADALINE and ANN-RIIP based control technique for harmonics identification |
| [28] | Real-Time high-speed controller HIL testing for improvement of medium voltage grid power quality of SAPF. | Real Time Simulator with DSP controller for CHIL simulations |
| [29] | The fuzzy-based control scheme helps to improve transient and steady-state error. The error can be reduced by setting fuzzy rules | The fuzzy logic and neural network-based control scheme have been proposed |
| Simulation Parameters | Values |
|---|---|
| Phase voltage RMS value | 220 V |
| Frequency | 50 Hz |
| 622 V DC | |
| 25 | |
| 17 | |
| Power rating | 10 kVA |
| 3 Single-phase rectifier non-linear load (R, L, and C) | , (720 VAR) |
| Sr No. | Activation Function | Efficiency | MSE | Epochs |
|---|---|---|---|---|
| 1 | sigmoid | 0.96 | 0.0012601 | 300 |
| 2 | softmax | 0.54 | 0.0897195 | 300 |
| 3 | Elu | 0.99 | 0.0002285 | 300 |
| 4 | exponential | 0.94 | 0.0034175 | 300 |
| 5 | softplus | 0.94 | 0.0012314 | 300 |
| 6 | softsign | 0.98 | 0.0000675 | 300 |
| 7 | tanh | 0.98 | 0.0002923 | 300 |
| 8 | relu | 0.99 | 0.0000166 | 300 |
| Parameters | THD (%) | Neutral Wire Current (Amp) | Stability Time (s) | DC Voltage Fluctuations (Volt) | |
|---|---|---|---|---|---|
| Control Techniques | |||||
| Pq0 theory Implemented in SIMULINK | 3.28 | 0.9 | 0.06 | 3.891 | |
| ANN Based Filter Implemented In SIMULINK | 3.01 | 0.67 | 0.06 | 1.794 | |
| Pq0 theory based Filter Implemented In Raspberry PI | 3.57 | 0.68 | 0.06 | 2.012 | |
| ANN Based Filter Implemented In Raspberry PI | 3.75 | 0.75 | 0.06 | 2.314 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rizwan, R.; Arshad, J.; Almogren, A.; Jaffery, M.H.; Yousaf, A.; Khan, A.; Ur Rehman, A.; Shafiq, M. Implementation of ANN-Based Embedded Hybrid Power Filter Using HIL-Topology with Real-Time Data Visualization through Node-RED. Energies 2021, 14, 7127. https://doi.org/10.3390/en14217127
Rizwan R, Arshad J, Almogren A, Jaffery MH, Yousaf A, Khan A, Ur Rehman A, Shafiq M. Implementation of ANN-Based Embedded Hybrid Power Filter Using HIL-Topology with Real-Time Data Visualization through Node-RED. Energies. 2021; 14(21):7127. https://doi.org/10.3390/en14217127
Chicago/Turabian StyleRizwan, Raffay, Jehangir Arshad, Ahmad Almogren, Mujtaba Hussain Jaffery, Adnan Yousaf, Ayesha Khan, Ateeq Ur Rehman, and Muhammad Shafiq. 2021. "Implementation of ANN-Based Embedded Hybrid Power Filter Using HIL-Topology with Real-Time Data Visualization through Node-RED" Energies 14, no. 21: 7127. https://doi.org/10.3390/en14217127
APA StyleRizwan, R., Arshad, J., Almogren, A., Jaffery, M. H., Yousaf, A., Khan, A., Ur Rehman, A., & Shafiq, M. (2021). Implementation of ANN-Based Embedded Hybrid Power Filter Using HIL-Topology with Real-Time Data Visualization through Node-RED. Energies, 14(21), 7127. https://doi.org/10.3390/en14217127