
Magnetic Driven Two-Finger Micro-Hand with Soft Magnetic End-Effector for Force-Controlled Stable Manipulation in Microscale

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
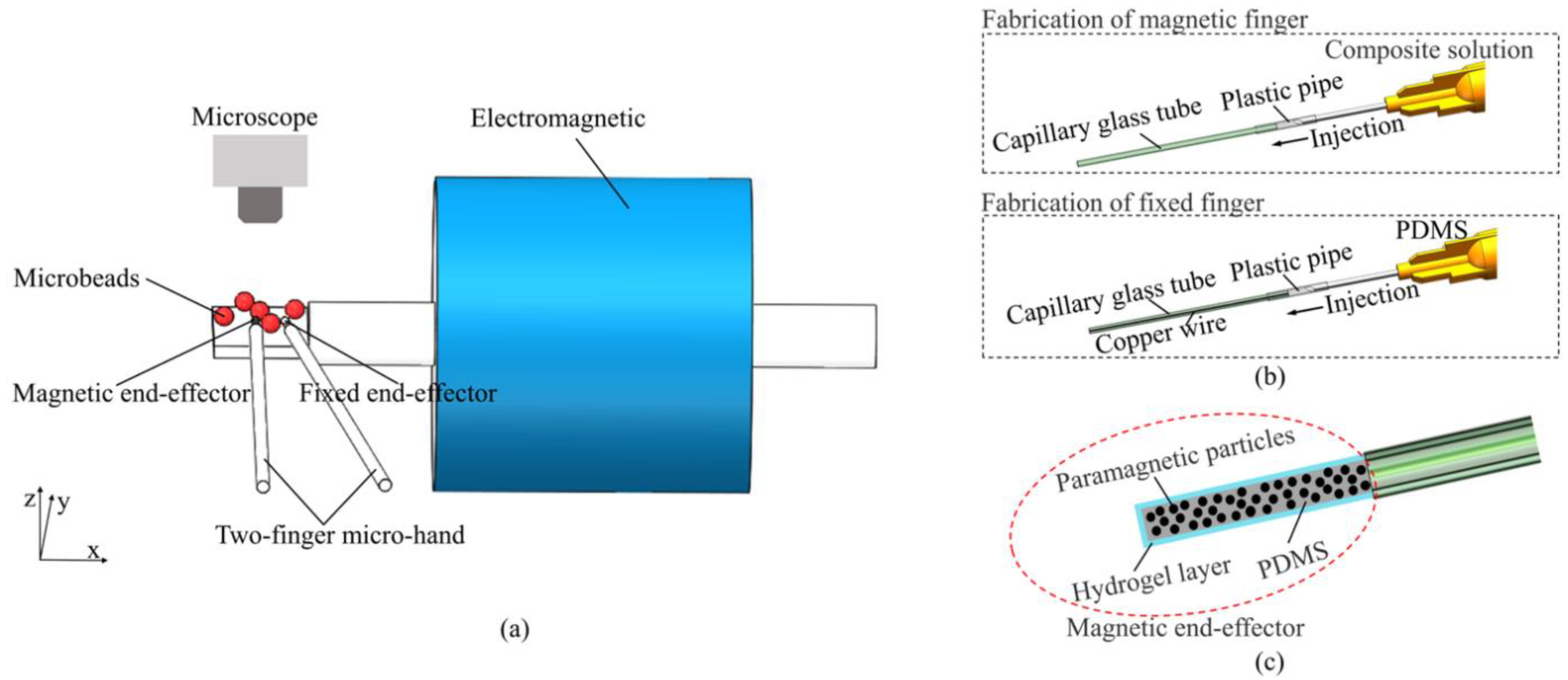
2. Overview of Magnetically Driven Two-Finger Microhand
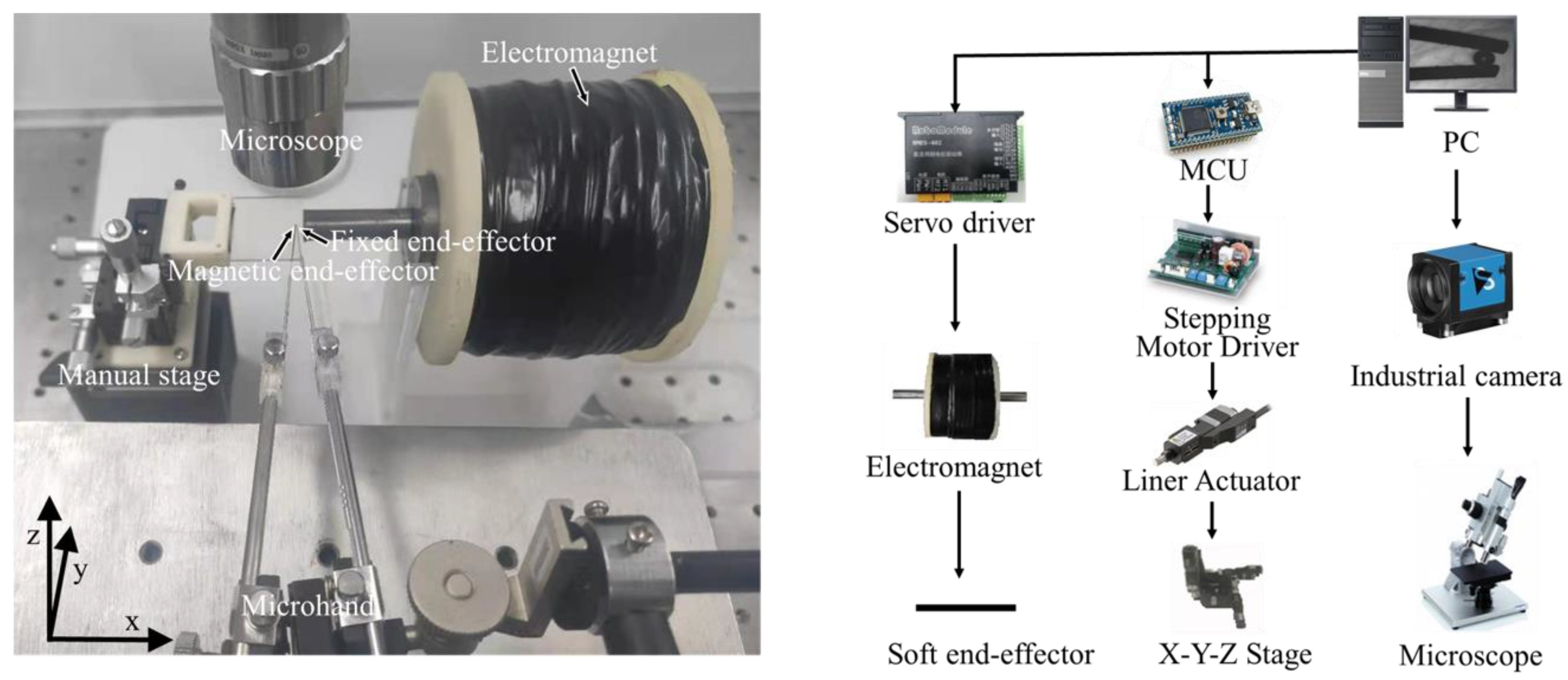
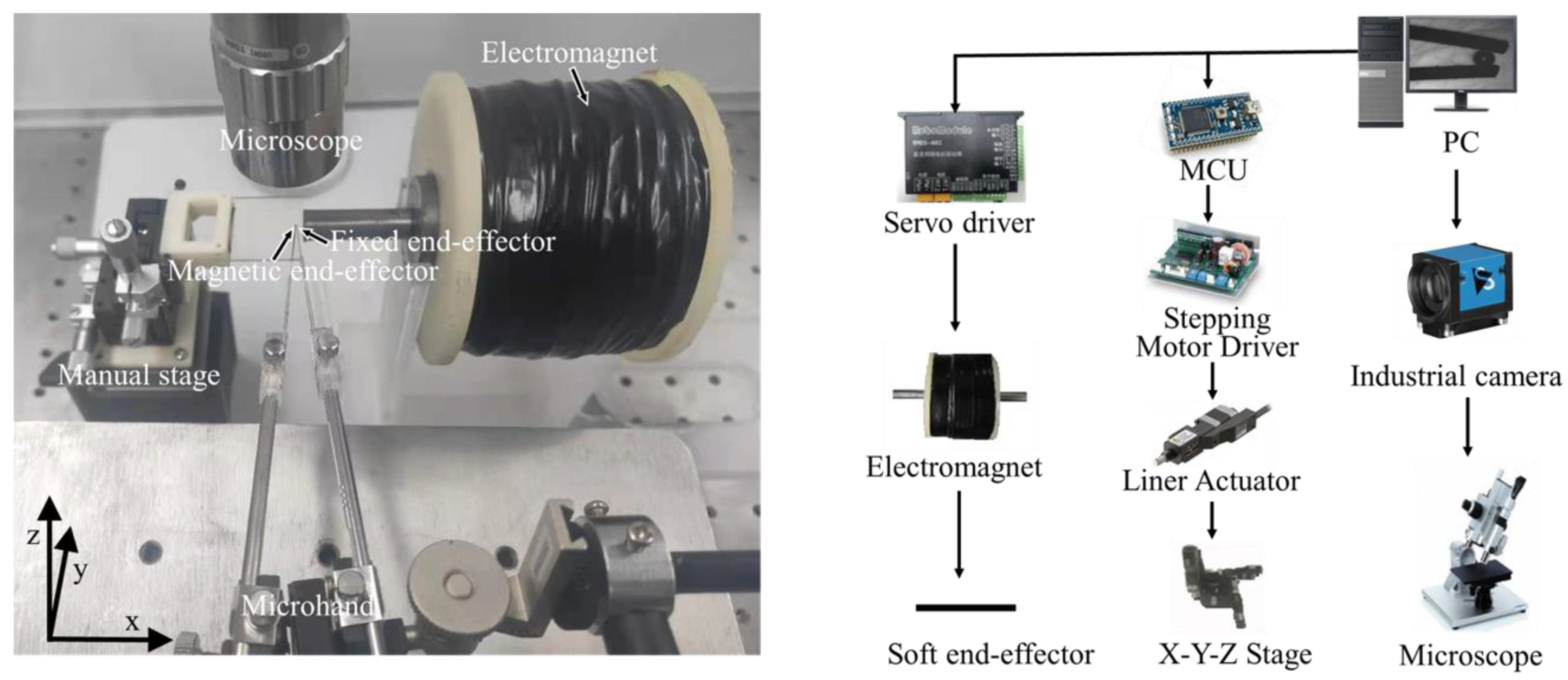
2.1. System Setup
2.2. Magnetic Drive
2.3. Fabrication
3. Testing and Analysis of Magnetic End-Effector Movement
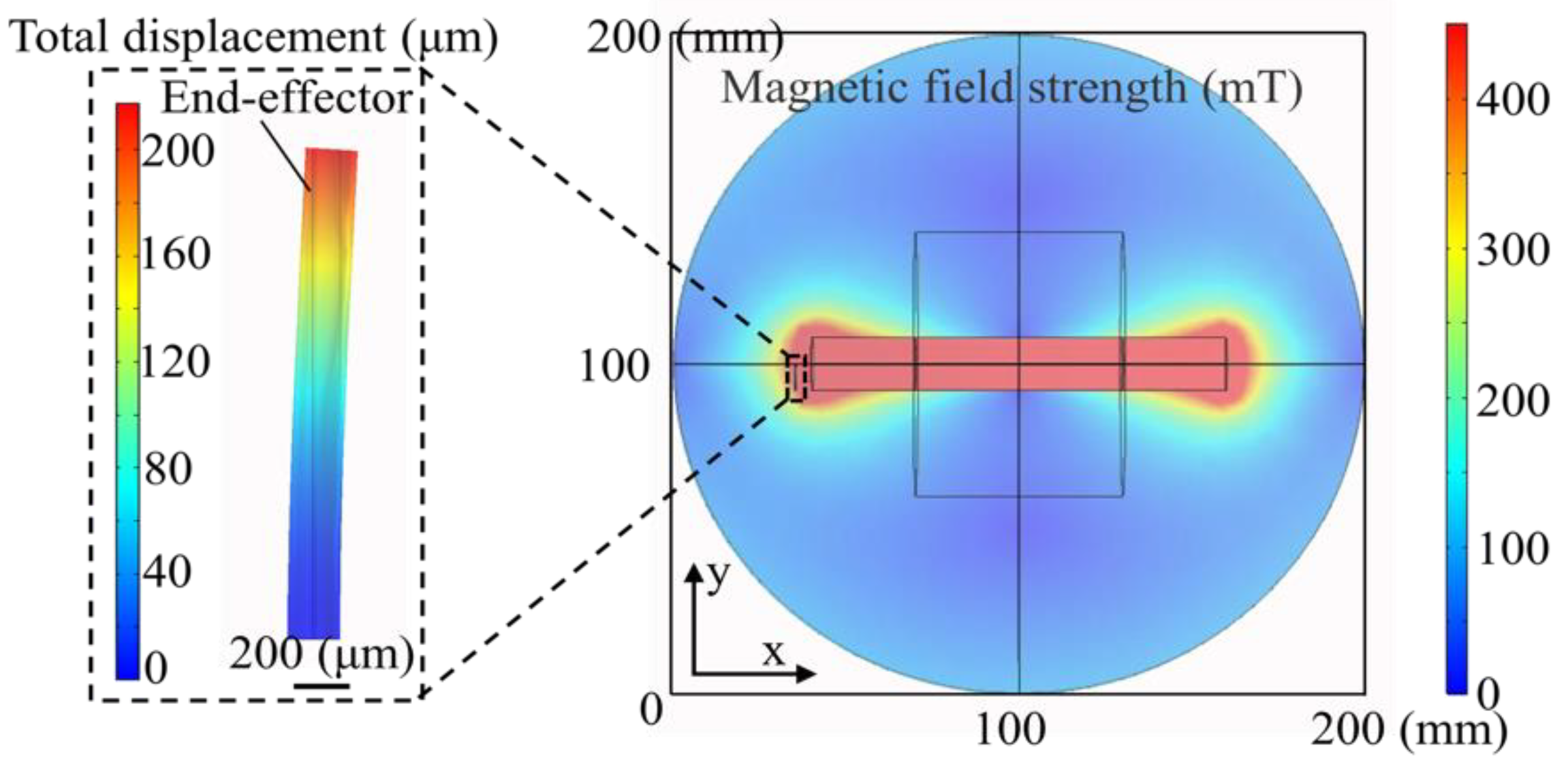
3.1. End-Effector Movement Simulation
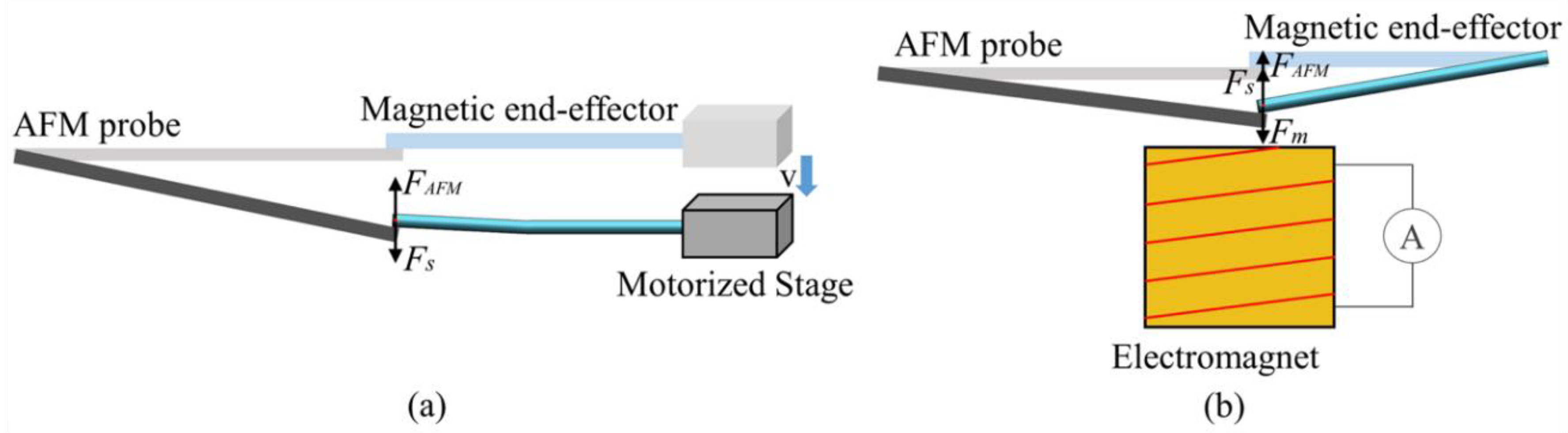
3.2. Magnetic Force Calibration
3.2.1. The Stiffness of the Magnetic End-Effector
3.2.2. Magnetic Force Test
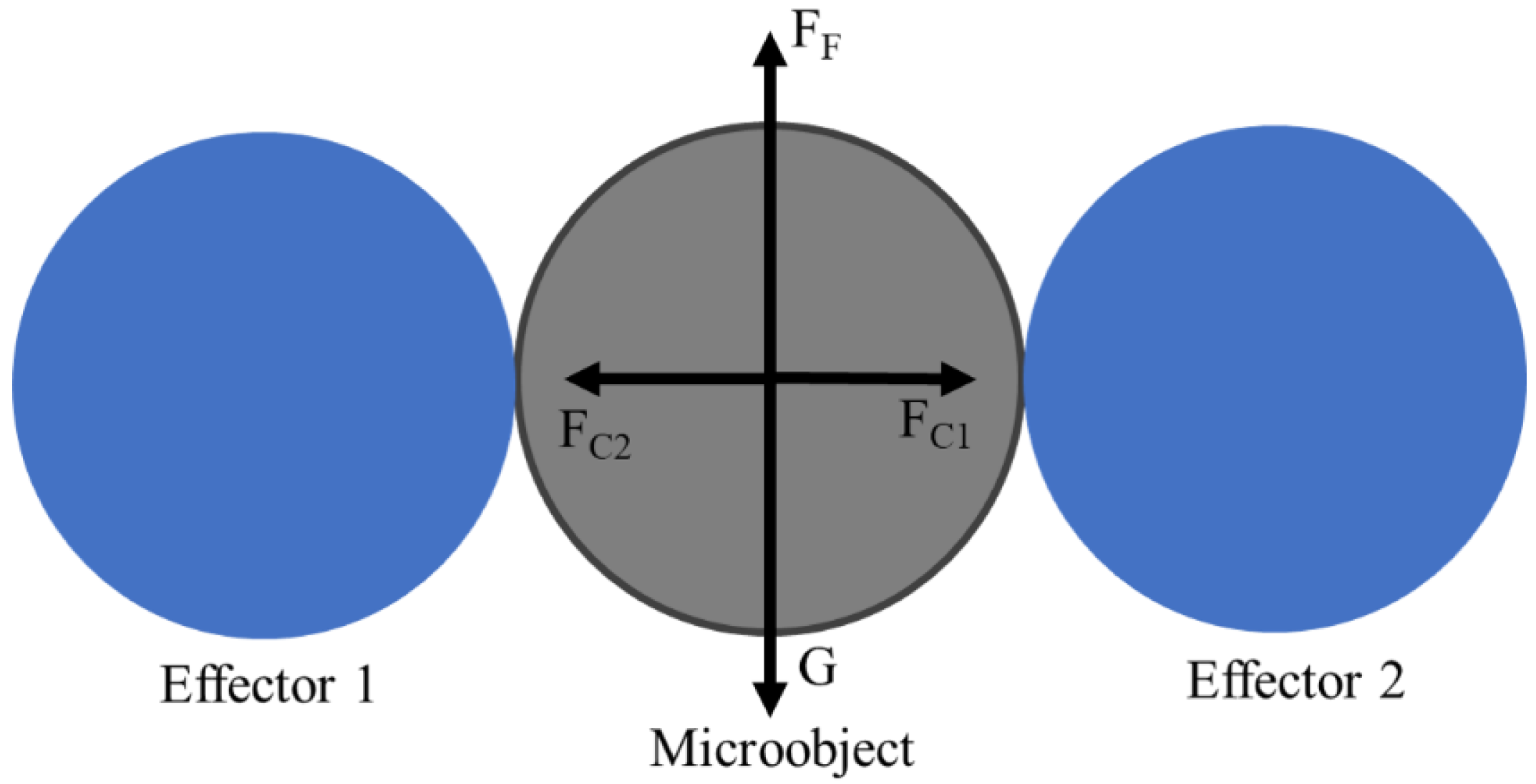
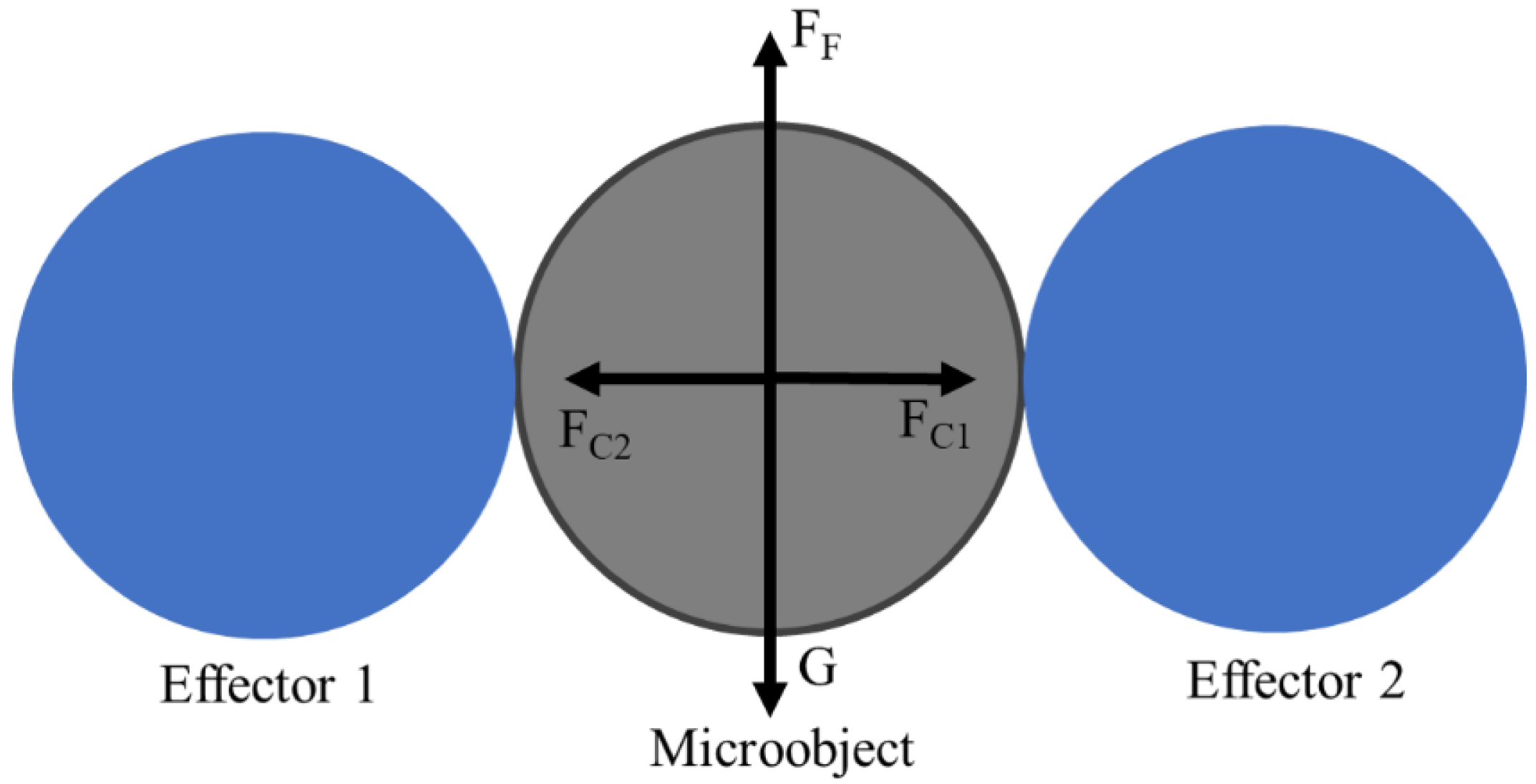
3.3. Grasping Analysis
3.4. Characteristic Analysis
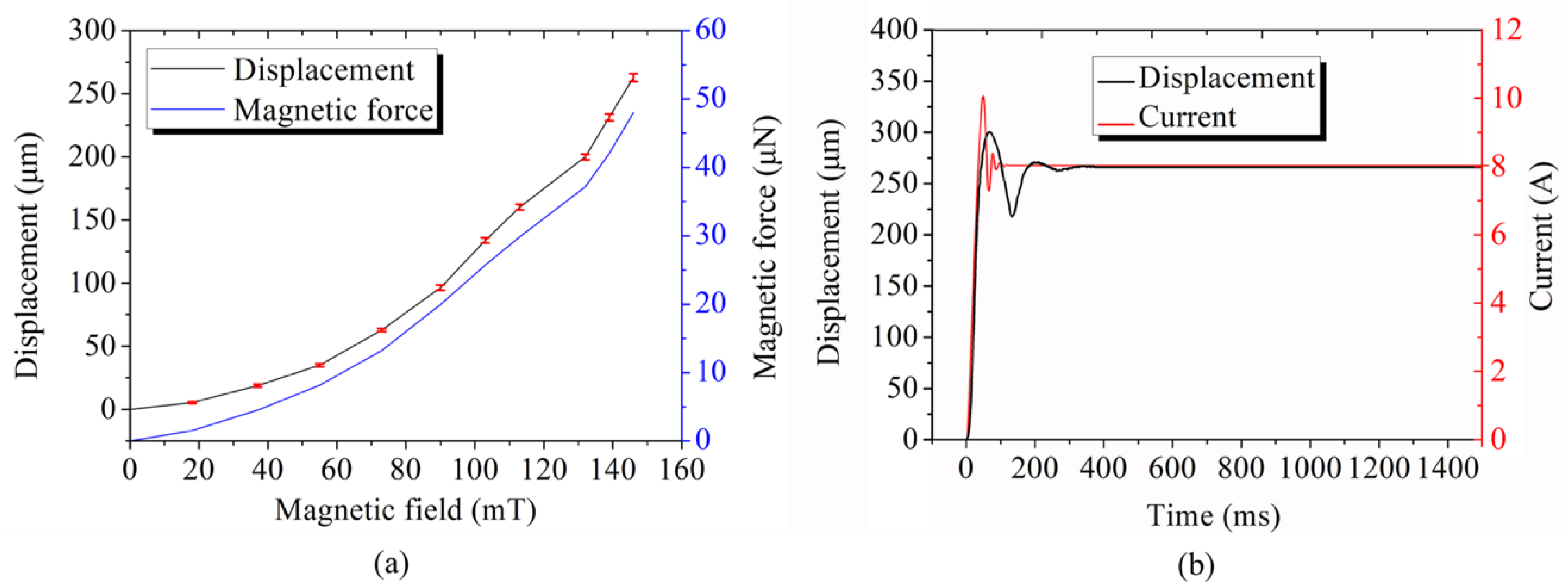
3.4.1. Static Performance Analysis
3.4.2. Dynamic Performance Analysis
4. Experiments and Discussion
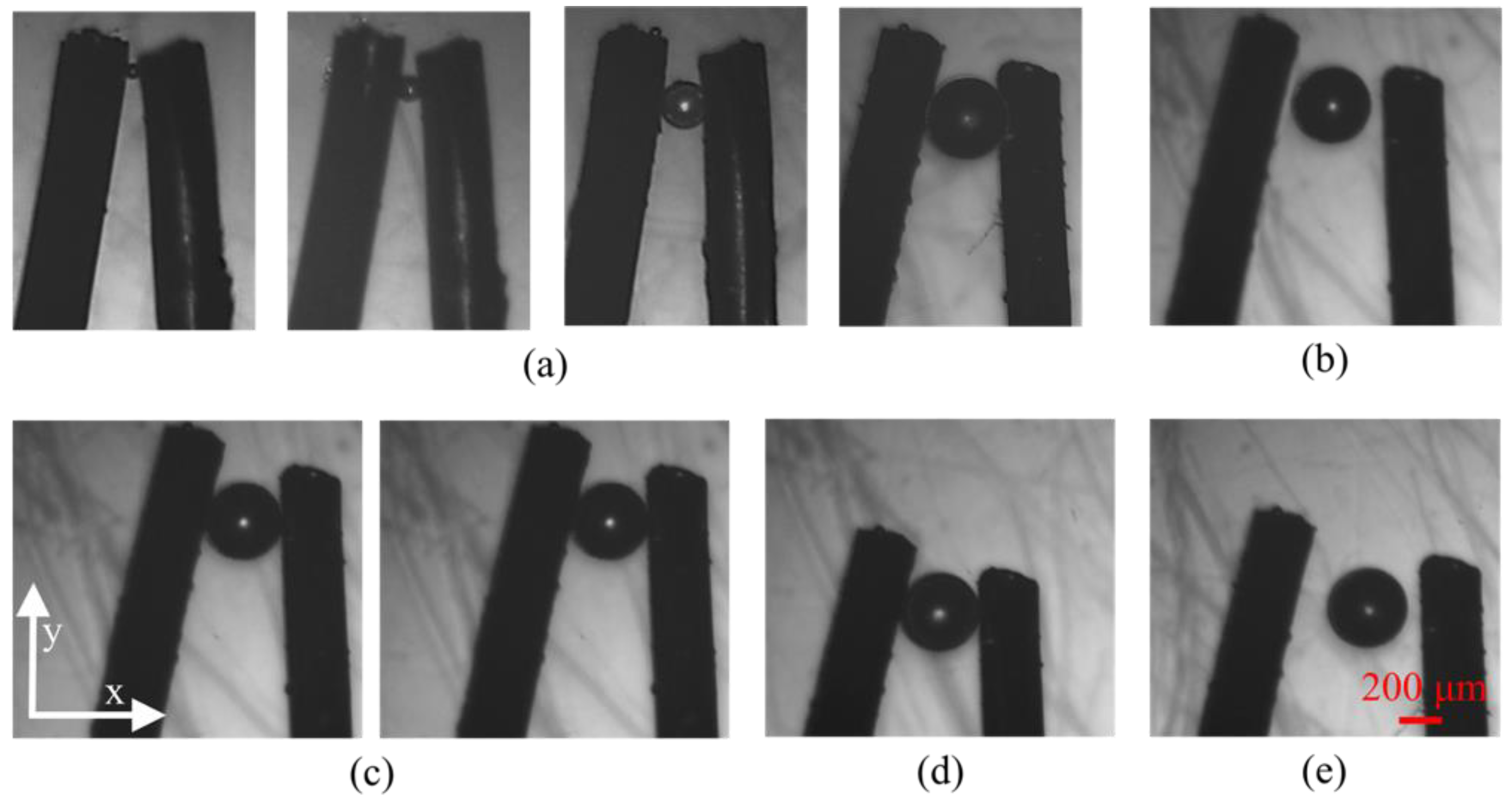
4.1. Force-Controlled Grasping Manipulation
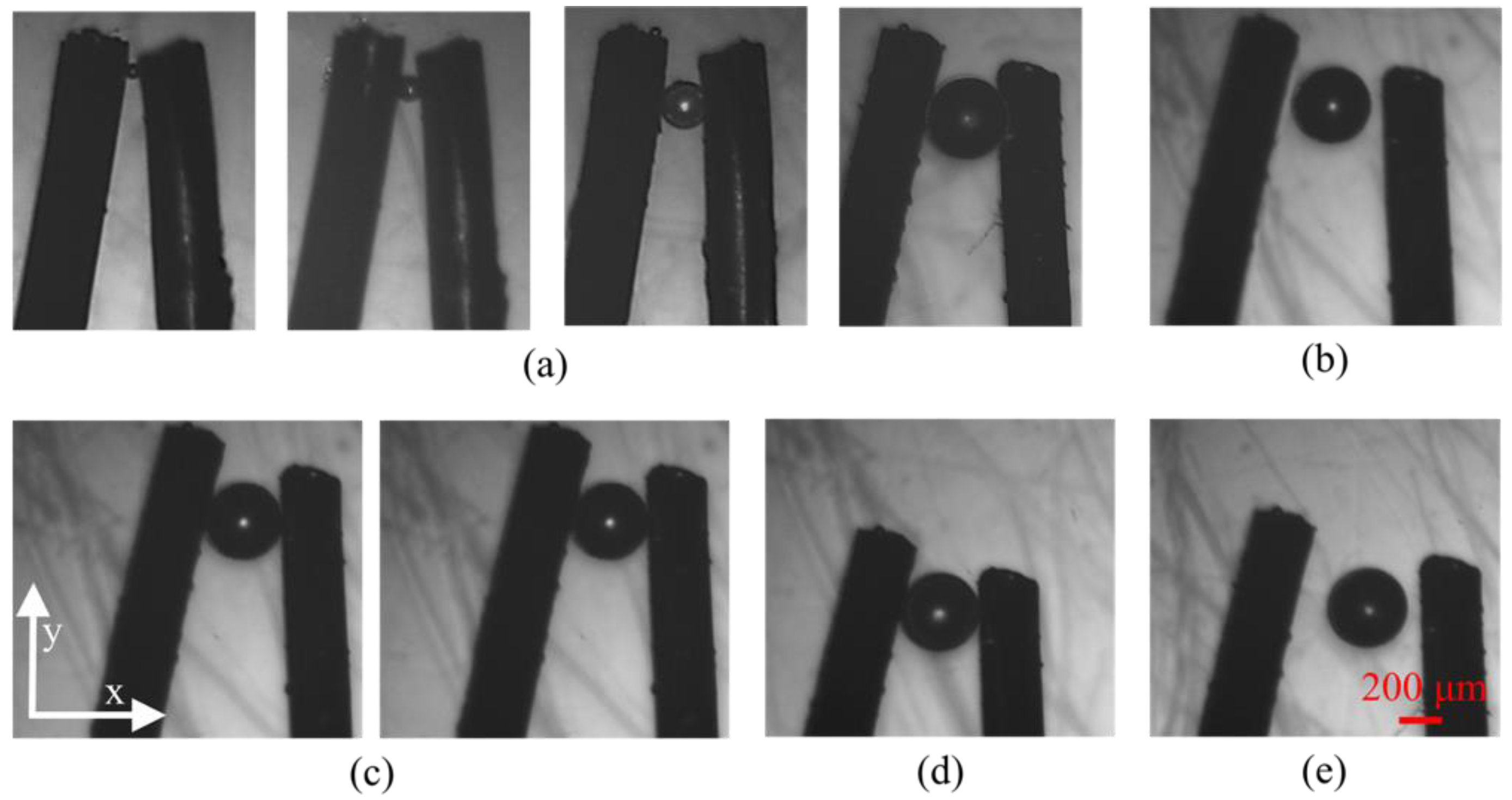
- Locate the microbead at the middle of two end-effectors by moving the X-Y-Z motorized stage driven by the stepping motor, as shown in Figure 7b.
- The magnetic end-effector was moved in the direction of the microbead until both the two end-effectors nearly contacted the microbead by increasing current, I1. The magnetic end-effector was subjected to a magnetic force F(I1) at the current position.
- Figure 7c shows the grasping process by increasing another current, I2, to grasp the microbead. The magnetic force on the magnetic end-effector was F(I2) at this moment. Therefore, the clamping force on the microbead was F(I2) − F(I1).
- Transport the microbead to the desired location by moving the X-Y-Z motorized stage after grasping the microbead, as shown in Figure 7d.
- Finally, move the magnetic end-effector to the initial location to release the microbead, as shown in Figure 7e.
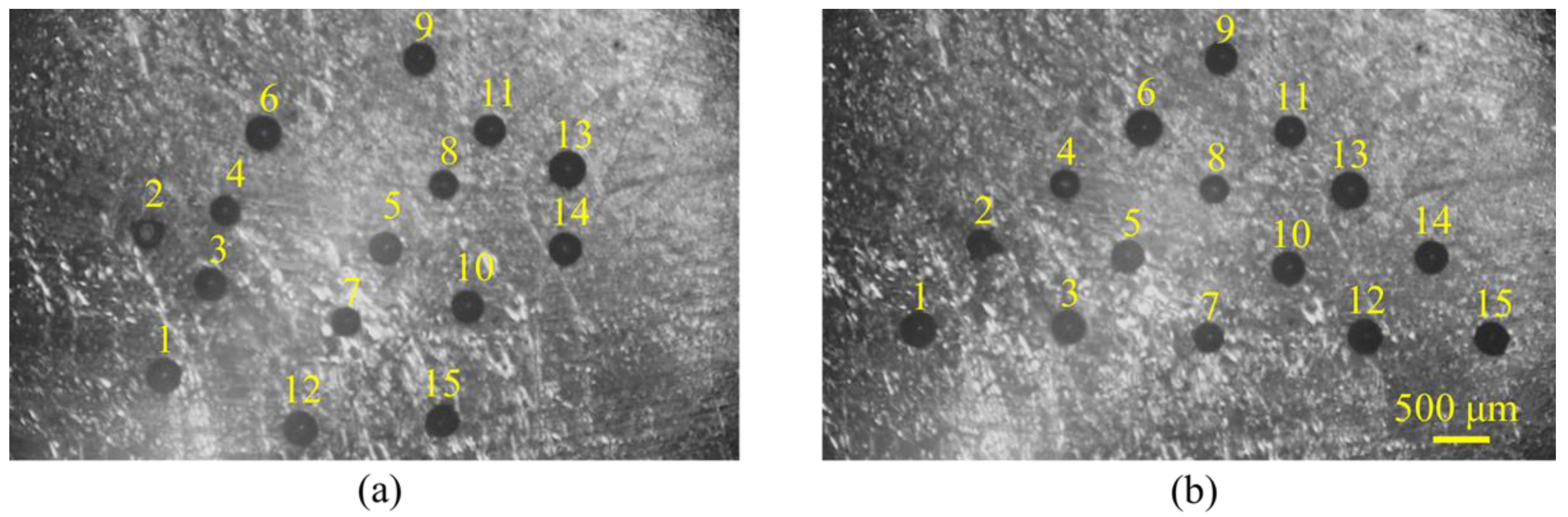
4.2. Assembly of Microbeads
4.3. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Chen, B.K.; Liu, X.; Sun, Y. Autonomous robotic pick-and-place of microobjects. IEEE Trans. Robot. 2010, 26, 200–207. [Google Scholar] [CrossRef]
- Zhang, J.; Onaizah, O.; Middleton, K.; You, L.; Diller, E. Reliable Grasping of Three-Dimensional Untethered Mobile Magnetic Microgripper for Autonomous Pick-and-Place. IEEE Robot. Autom. Lett. 2017, 2, 835–840. [Google Scholar] [CrossRef]
- Khangai, N.; Kojima, M.; Horade, M.; Kamiyama, K.; Sakai, S.; Mae, Y.; Arai, T. 1P1-N06 Cell Stiffness Measurement Using Two-fingered Micro-hand with Micro force sensor equipped with plate-shaped end effector. Proc. JSME Annu. Conf. Robot. Mechatron. 2014. [Google Scholar] [CrossRef]
- Xie, H.; Meng, X.; Zhang, H.; Sun, L. Development of a Magnetically Driven Microgripper for PicoNewton Force-Controlled Microscale Manipulation and Characterization. IEEE Trans. Ind. Electron. 2019, 67, 2065–2075. [Google Scholar] [CrossRef]
- Liu, X.; Shi, Q.; Wang, H.; Sun, T.; Yu, N.; Huang, Q.; Fukuda, T. Automated Fluidic Assembly of Microvessel-Like Structures Using a Multi-Micromanipulator System. IEEE/ASME Trans. Mechatronics 2018, 23, 667–678. [Google Scholar] [CrossRef]
- Avci, E.; Ohara, K.; Nguyen, C.N.; Theeravithayangkura, C.; Kojima, M.; Tanikawa, T.; Mae, Y.; Arai, T. High-speed automated manipulation of microobjects using a two-fingered microhand. IEEE Trans. Ind. Electron. 2015, 62, 1070–1079. [Google Scholar] [CrossRef]
- Kim, E.; Kojima, M.; Kamiyama, K.; Horade, M.; Mae, Y.; Arai, T. High-Speed Active Release End-Effector Motions for Precise Positioning of Adhered Micro-Objects. World J. Eng. Technol. 2018, 6, 81–103. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Shi, Q.; Lin, Y.; Kojima, M.; Mae, Y.; Fukuda, T.; Huang, Q.; Arai, T. Multifunctional Noncontact Micromanipulation Using Whirling Flow Generated by Vibrating a Single Piezo Actuator. Small 2019, 15, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Liu, X.; Zhang, Y.; Sun, Y. Nanonewton force-controlled manipulation of biological cells using a monolithic MEMS microgripper with two-axis force feedback. J. Micromech. Microeng. 2008, 18, 5. [Google Scholar] [CrossRef]
- Chen, B.K.; Zhang, Y.; Sun, Y. Active release of microobjects using a MEMS microgripper to overcome adhesion forces. J. Microelectromech. Syst. 2009, 18, 652–659. [Google Scholar] [CrossRef] [Green Version]
- Randhawa, J.S.; Leong, T.G.; Bassik, N.; Benson, B.R.; Jochmans, M.T.; Gracias, D.H. Pick-and-place using chemically actuated microgrippers. J. Am. Chem. Soc. 2008, 130, 17238–17239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, F.; Liang, C.; Tian, Y.; Zhao, X.; Zhang, D. Design and Control of a Compliant Microgripper with a Large Amplification Ratio for High-Speed Micro Manipulation. IEEE/ASME Trans. Mechatron. 2016, 21, 1262–1271. [Google Scholar] [CrossRef]
- Liu, X.; Shi, Q.; Lin, Y.; Kojima, M.; Mae, Y.; Huang, Q.; Fukuda, T.; Arai, T. Hydrodynamic tweezers: Trapping and transportation in microscale using vortex induced by oscillation of a single piezoelectric actuator. Sensors 2018, 18, 2002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Chen, S.; Kong, M.; Wang, Z.; Costa, K.D.; Li, R.A.; Sun, D. Enhanced cell sorting and manipulation with combined optical tweezer and microfluidic chip technologies. Lab Chip. 2011, 11, 3656–3662. [Google Scholar] [CrossRef] [PubMed]
- Iliescu, C.; Xu, G.L.; Ong, P.L.; Yu, L.; Tay, F.E.H.; Iliescu, F.S.; Tressett, G. Manipulation of Biological Samples using Electric Field. In Proceedings of the IEEE International Semiconductor Conference, Sinaia, Romania, 17 September–15 October 2007; pp. 67–76. [Google Scholar]
- Wu, X.; Liu, J.; Huang, C.; Su, M.; Xu, T. 3-D Path Following of Helical Microswimmers With an Adaptive Orientation Compensation Model. IEEE Trans. Autom. Sci. Eng. 2020, 17, 823–832. [Google Scholar]
- Xu, T.; Yu, J.; Vong, C.-I.; Wang, B.; Wu, X.; Zhang, L. Dynamic Morphology and Swimming Properties of Rotating Miniature Swimmers with Soft Tails. IEEE/ASME Trans. Mechatron. 2019, 24, 924–934. [Google Scholar] [CrossRef]
- Xu, T.; Guan, Y.; Liu, J.; Wu, X. Image-Based Visual Servoing of Helical Microswimmers for Planar Path Following. IEEE Trans. Autom. Sci. Eng. 2019, 17, 325–333. [Google Scholar] [CrossRef]
- Hoshiar, A.K.; Jeon, S.; Kim, K.; Lee, S.; Kim, J.; Choi, H. Steering Algorithm for a Flexible Microrobot to Enhance Guidewire Control in a Coronary Angioplasty Application. Micromachines 2018, 9, 1–13. [Google Scholar]
- Liu, X.; Shi, Q.; Lin, Y.; Kojima, M.; Mae, Y.; Huang, Q.; Fukuda, T.; Arai, T. Vortex-Driven Rotation for Three-Dimensional Imaging under Microscopy. IEEE Trans. Nanotechnol. 2018, 17, 688–691. [Google Scholar] [CrossRef]
- El-Gazzar, A.G.; Al-Khouly, L.E.; Klingner, A.; Misra, S.; Khalil, I.S.M. Non-Contact manipulation of microbeads via pushing and pulling using magnetically controlled clusters of paramagnetic microparticles. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 778–783. [Google Scholar]
- Sodavaram, N.K.; Arif, K.M. A compact stepper motor actuated disposable microgripper. Int. J. Precis. Eng. Manuf. 2016, 17, 1359–1364. [Google Scholar] [CrossRef]
- Shahriari, M.; Zabihollah, A. Conceptual Design of a Micro Gripper with Electrostatic Micro Stepper-Motor Actuation. Life Sci. J. 2013, 10, 290–293. [Google Scholar]
- Ok, J.; Lu, Y.W.; Kim, C.J. Pneumatically driven microcage for microbe manipulation in a biological liquid environment. J. Microelectromech. Syst. 2006, 15, 1499–1505. [Google Scholar] [CrossRef]
- Nah, S.K.; Zhong, Z.W. A microgripper using piezoelectric actuation for micro-object manipulation. Sens. Actuator A Phys. 2007, 133, 218–224. [Google Scholar] [CrossRef]
- Haddab, Y.; Chaillet, N.; Bourjault, A. A Microgripper Using Smart Piezoelectric Actuators. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Takamatsu, Japan, 31 October–5 November 2000; pp. 659–664. [Google Scholar]
- Petkovic, D.; Issa, M.; Pavlovic, N.D.; Zentner, L.; Cojbasic, Z. Adaptive neuro fuzzy controller for adaptive compliant robotic gripper. Expert Syst. Appl. 2012, 39, 13295–13304. [Google Scholar] [CrossRef]
- Petkovic, D.; Danesh, A.; Dadkhah, M.; Misaghian, N.; Shamshirband, S.; Zalnezhad, E.; Pavlovic, N. Adaptive control algorithm of fl exible robotic gripper by extreme learning machine. Robot. Comput. Integr. Manuf. 2016, 37, 170–178. [Google Scholar] [CrossRef]
- Liu, G.; Member, S.; Li, Z. Real-Time Grasping-Force Optimization for Multifingered Manipulation: Theory and Experiments. IEEE/ASME Trans. Mechatrons. 2004, 9, 65–77. [Google Scholar] [CrossRef]
- Rothwell, E.J.; Cloud, M.J. Electromagnetics; CRC press: Boca Raton, FL, USA, 2018. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Liu, X.; Li, P.; Tang, X.; Kojima, M.; Huang, Q.; Arai, T. Magnetic Driven Two-Finger Micro-Hand with Soft Magnetic End-Effector for Force-Controlled Stable Manipulation in Microscale. Micromachines 2021, 12, 410. https://doi.org/10.3390/mi12040410
Liu D, Liu X, Li P, Tang X, Kojima M, Huang Q, Arai T. Magnetic Driven Two-Finger Micro-Hand with Soft Magnetic End-Effector for Force-Controlled Stable Manipulation in Microscale. Micromachines. 2021; 12(4):410. https://doi.org/10.3390/mi12040410
Chicago/Turabian StyleLiu, Dan, Xiaoming Liu, Pengyun Li, Xiaoqing Tang, Masaru Kojima, Qiang Huang, and Tatsuo Arai. 2021. "Magnetic Driven Two-Finger Micro-Hand with Soft Magnetic End-Effector for Force-Controlled Stable Manipulation in Microscale" Micromachines 12, no. 4: 410. https://doi.org/10.3390/mi12040410