Development of a High-Resolution Wind Forecast System Based on the WRF Model and a Hybrid Kalman-Bayesian Filter

 , ,
, ,
Abstract
:1. Introduction
2. Methodology and Data
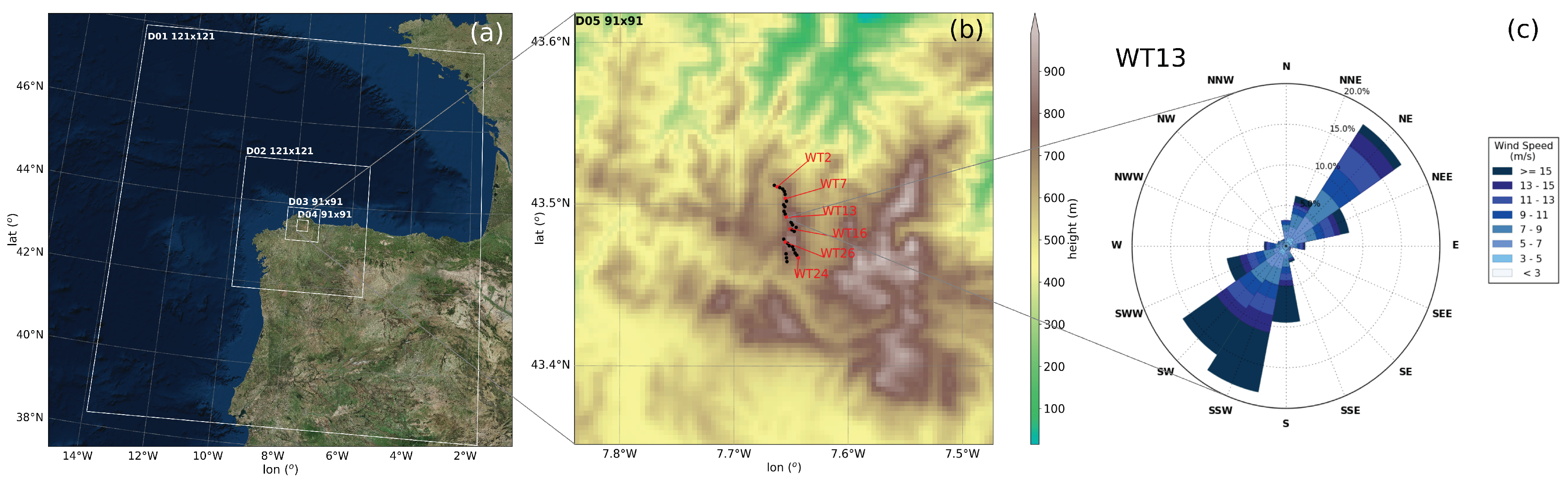
2.1. Wind Farm Location and WRF Configuration
2.2. Hybrid Bayesian Kalman Filter
- A first estimation of is given by
- The corresponding covariance matrix is calculated by
- With a new observation available the calculation of x at time t takes the form:
2.3. Observational Data and Nowcasting Experiments
3. Results and Discussion
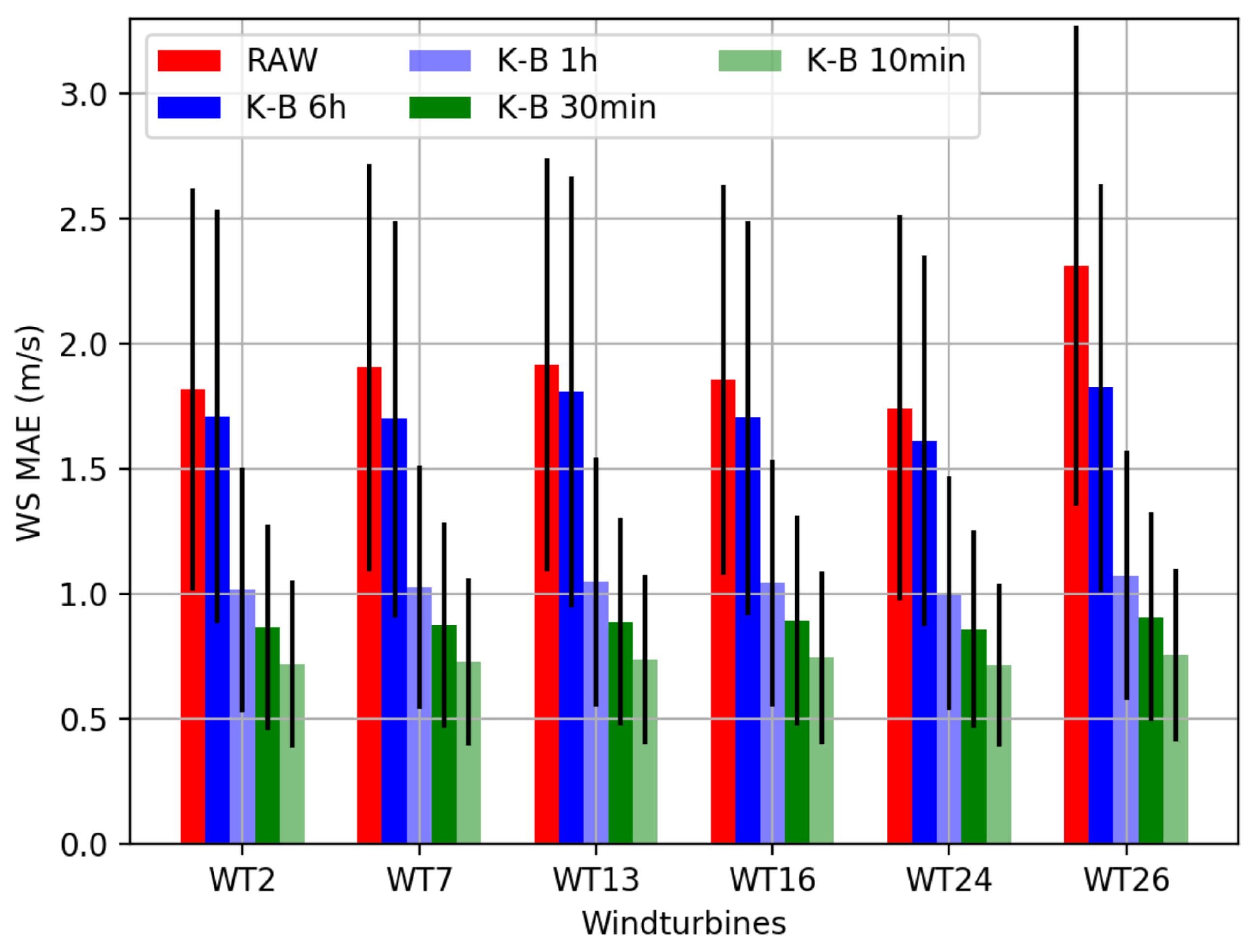
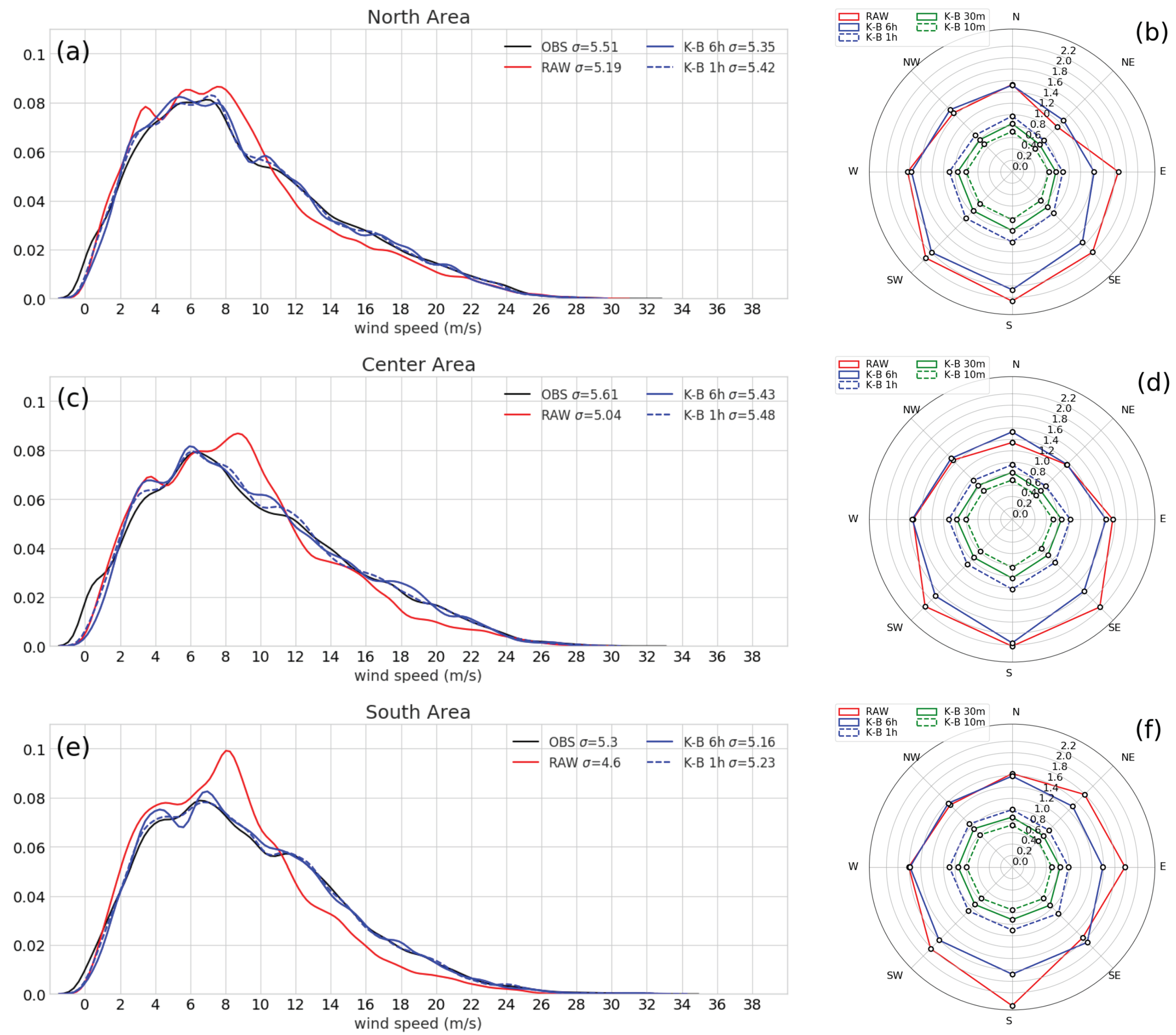
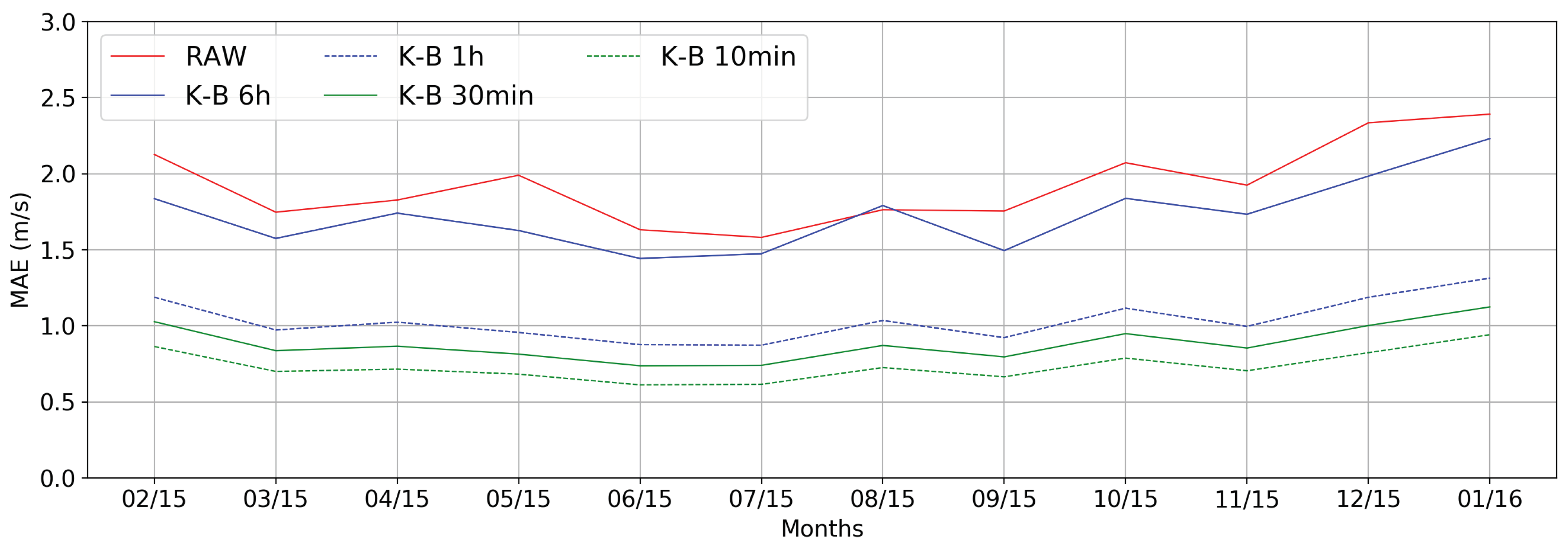
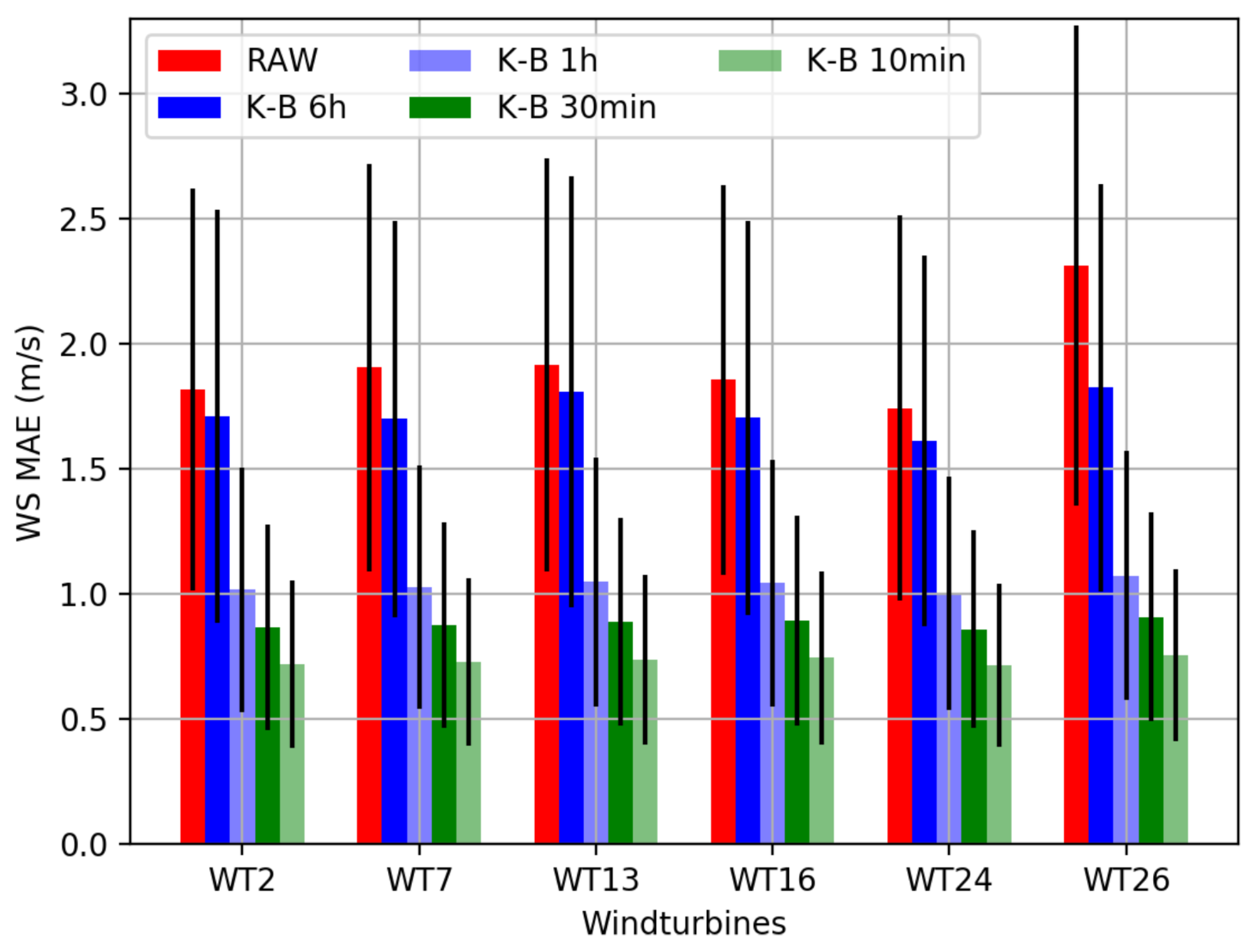
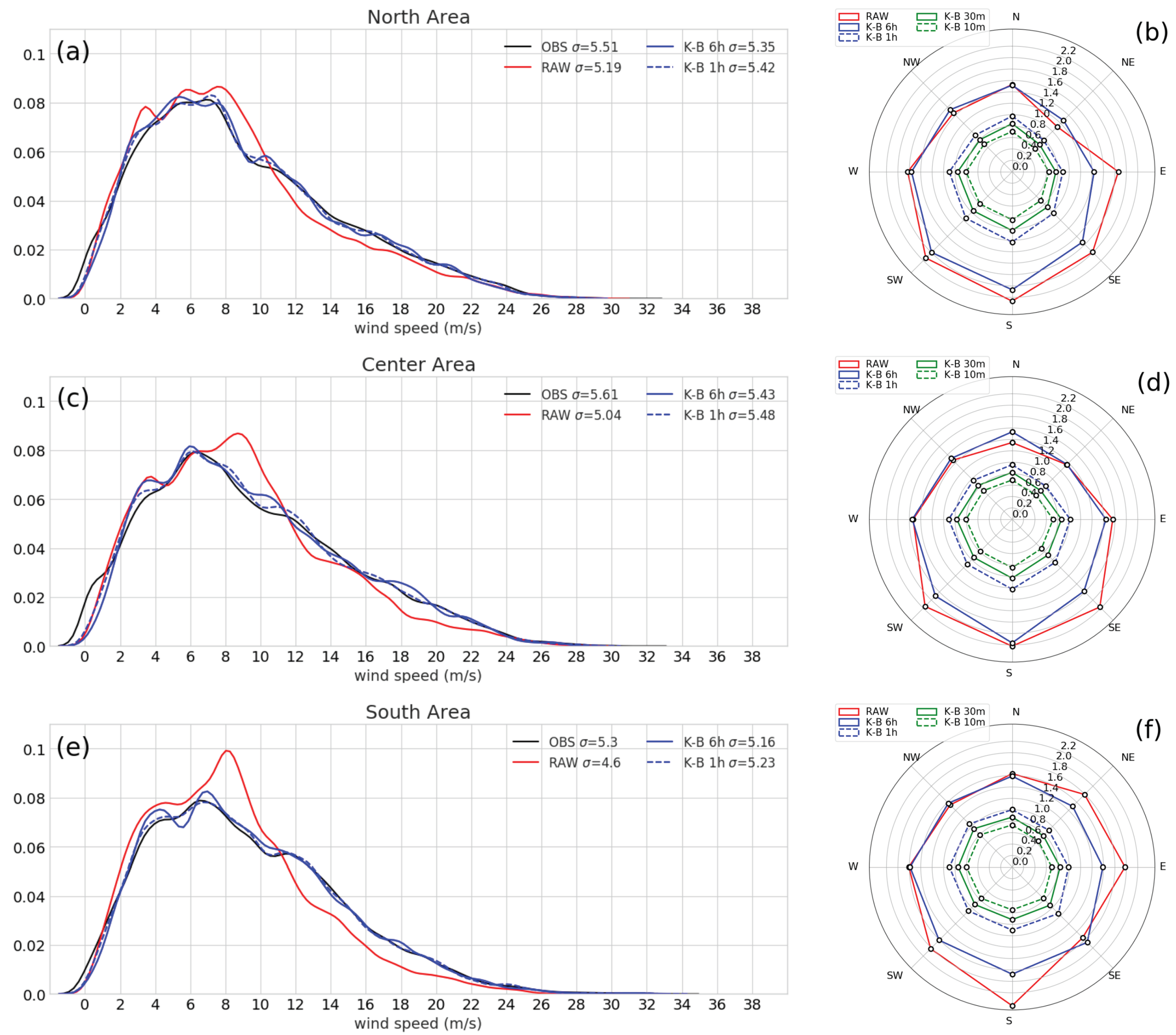
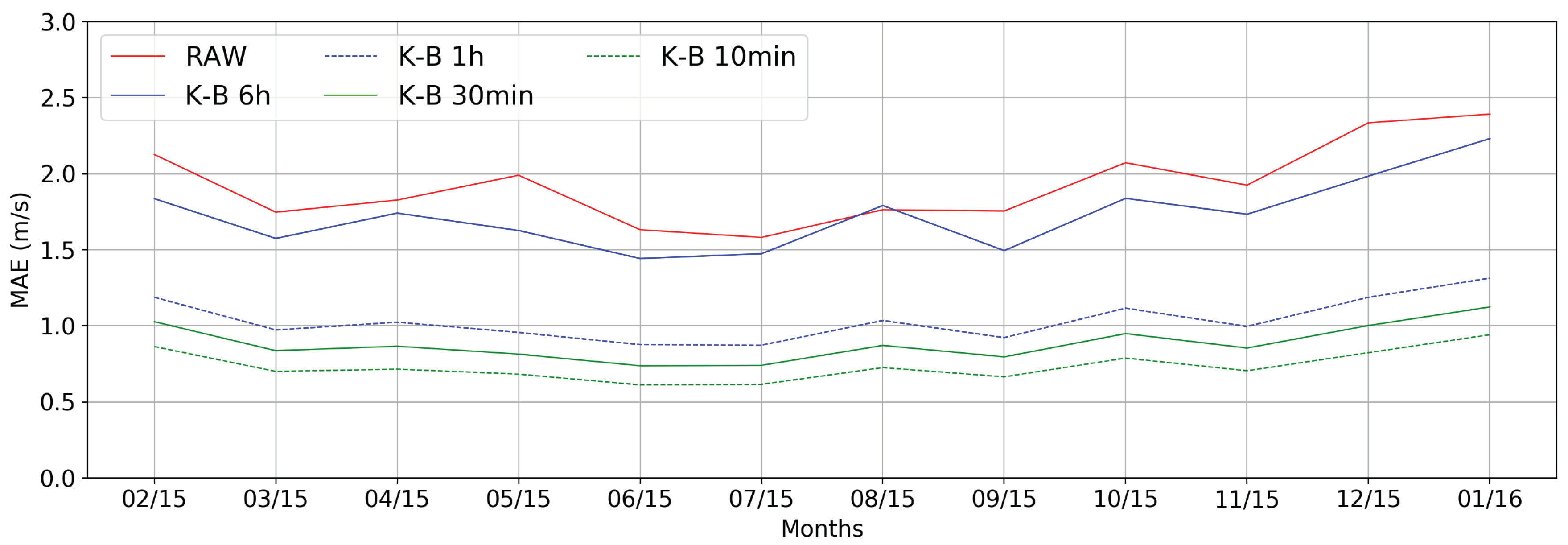
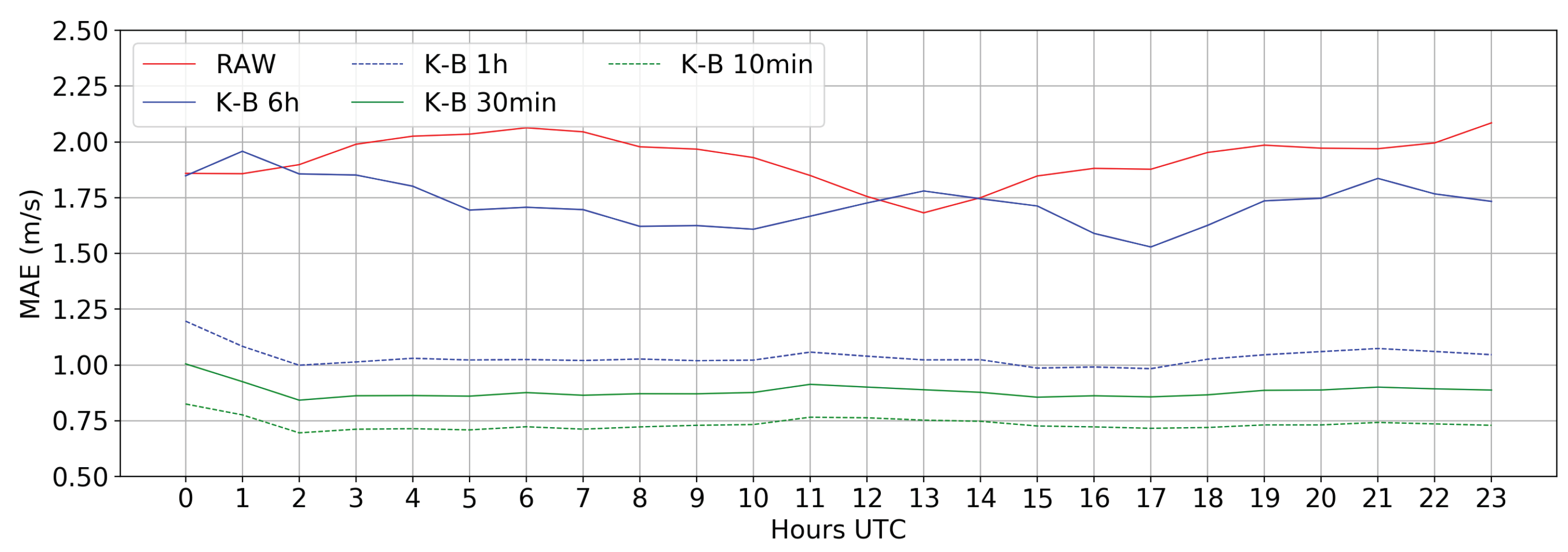
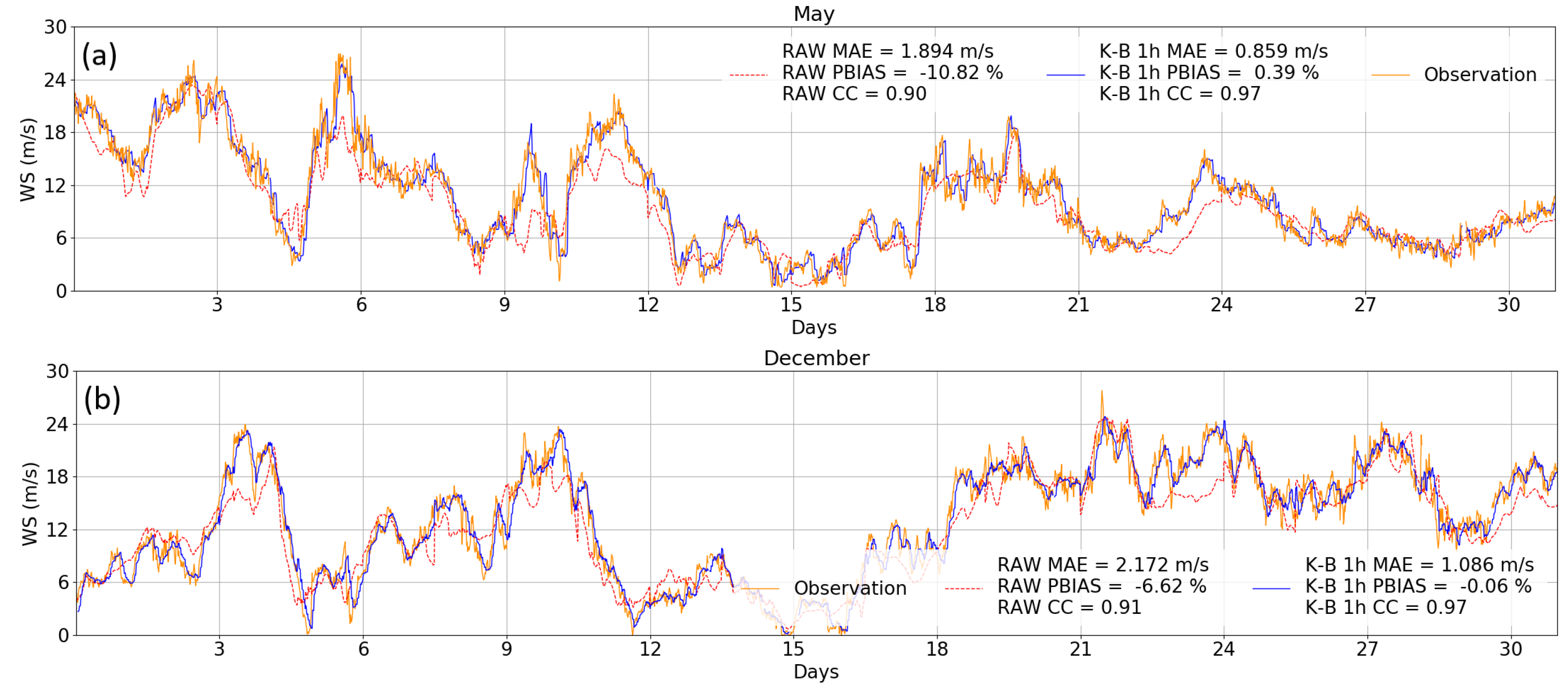
3.1. Wind Speed Nowcasting
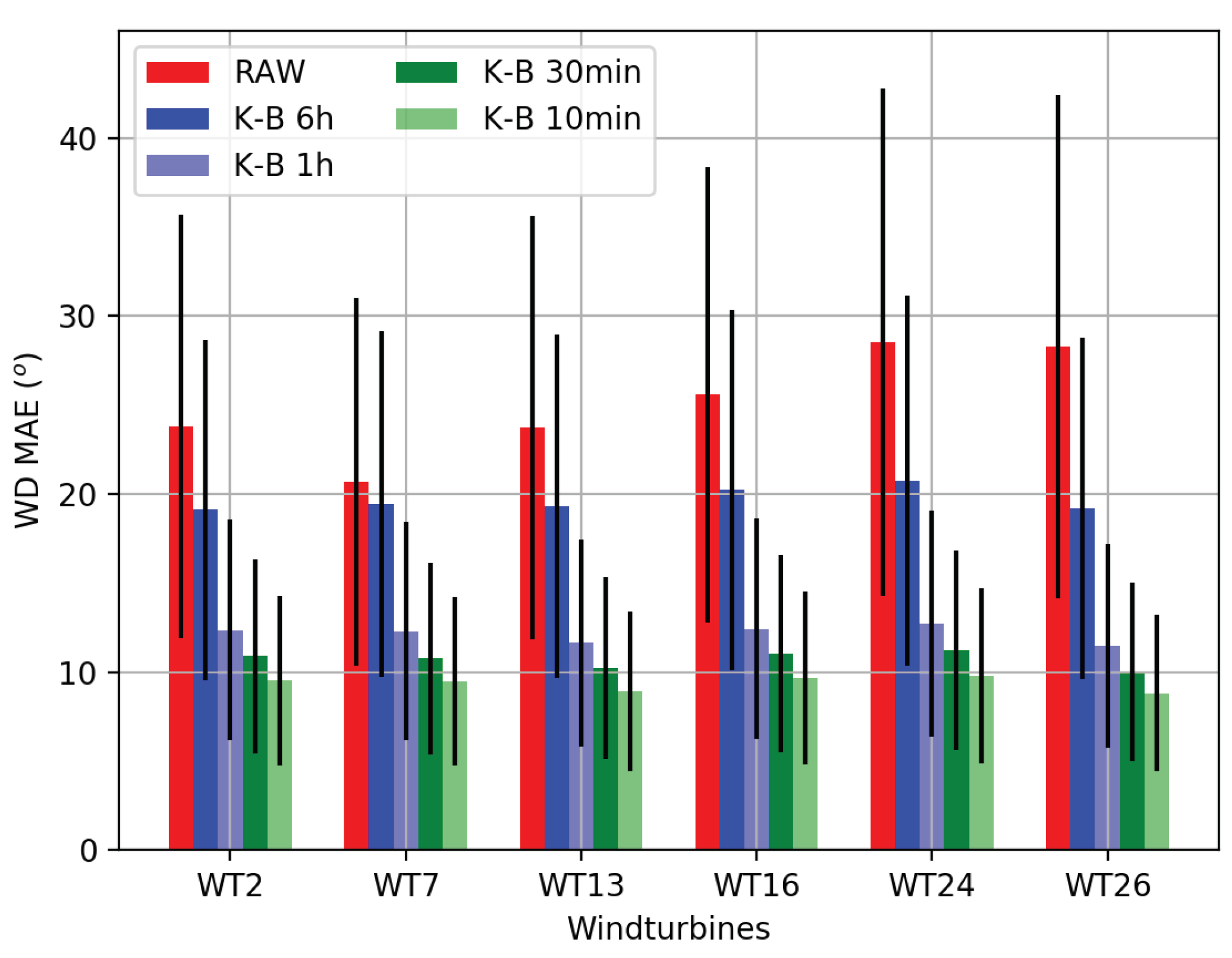
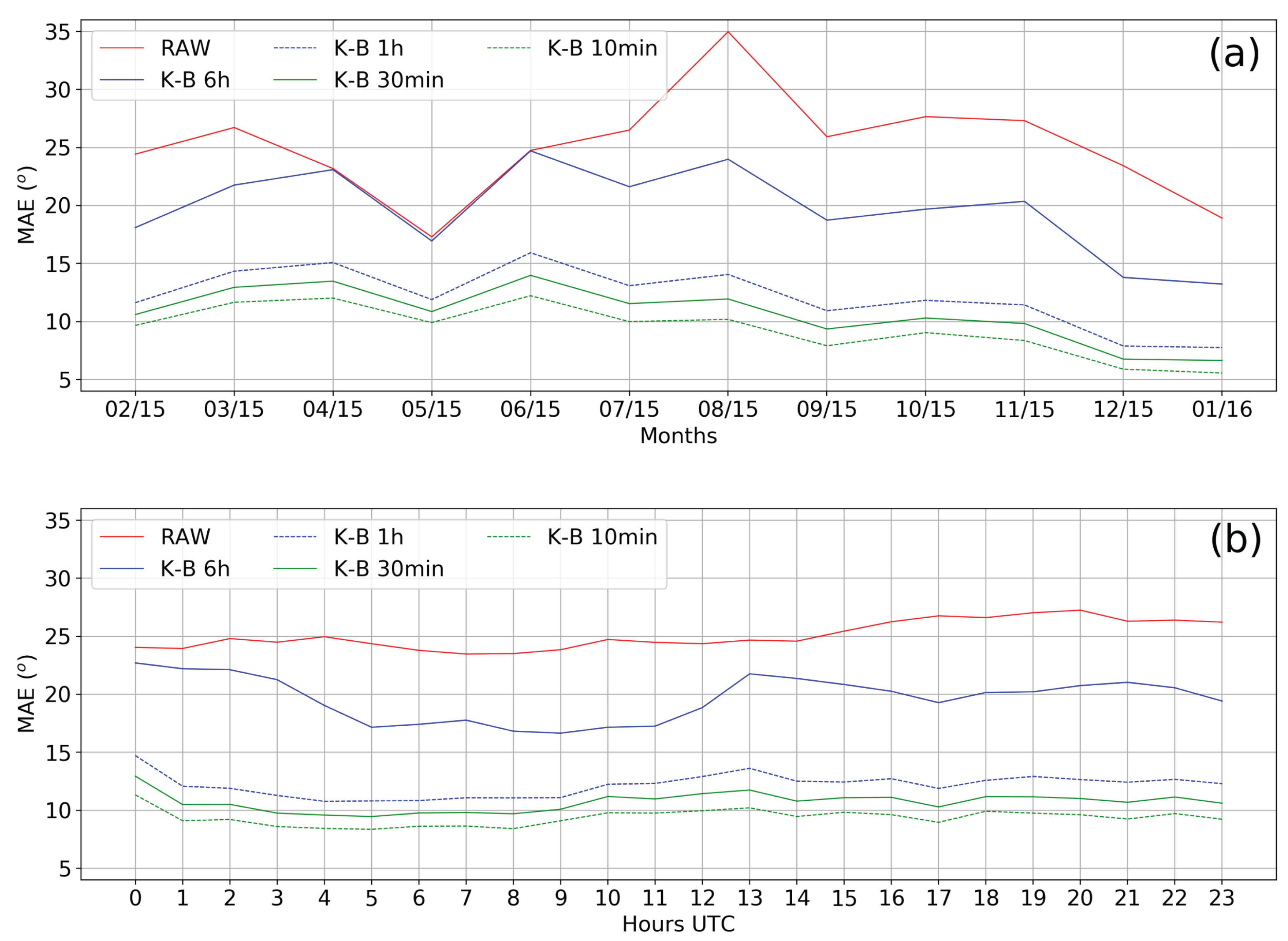
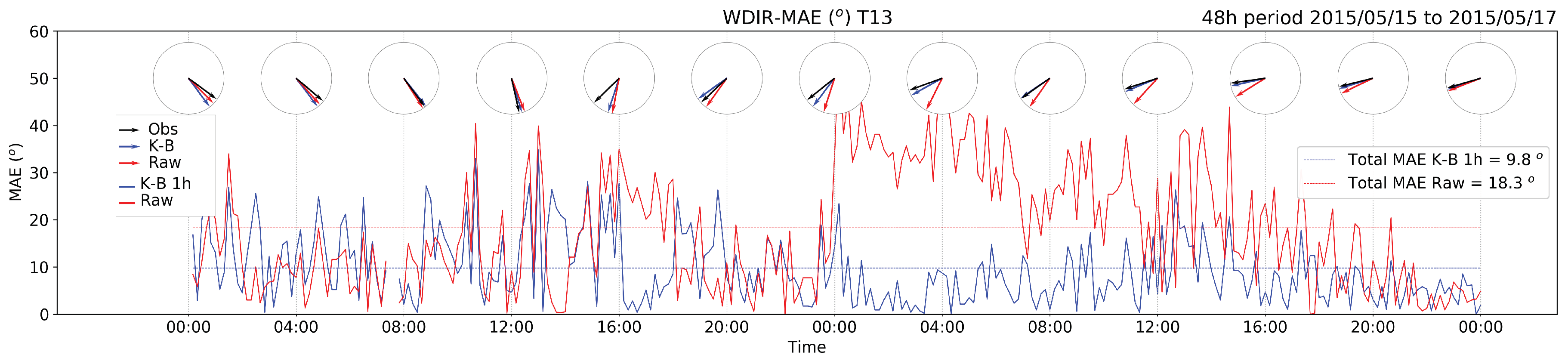
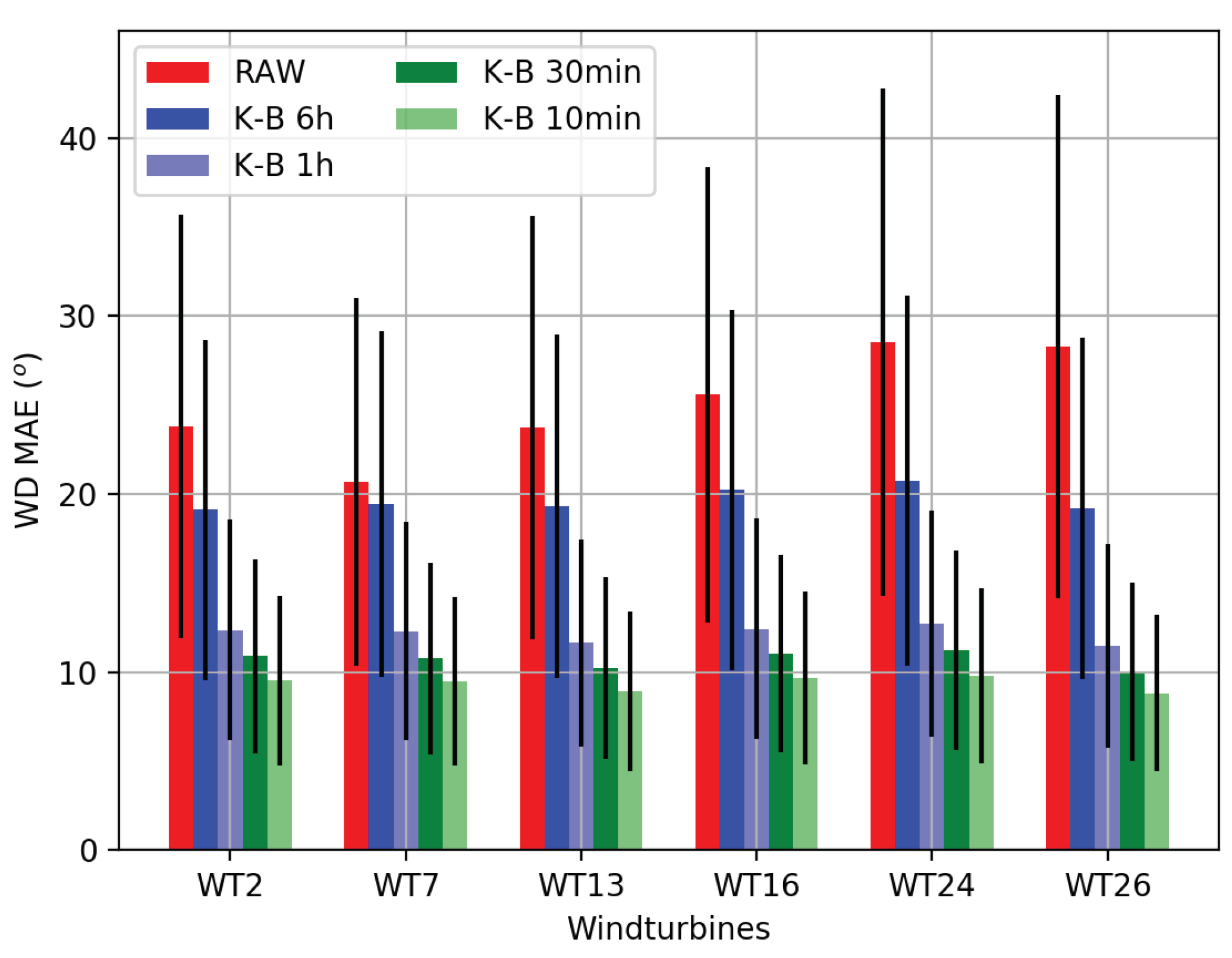
3.2. Wind Direction Nowcasting
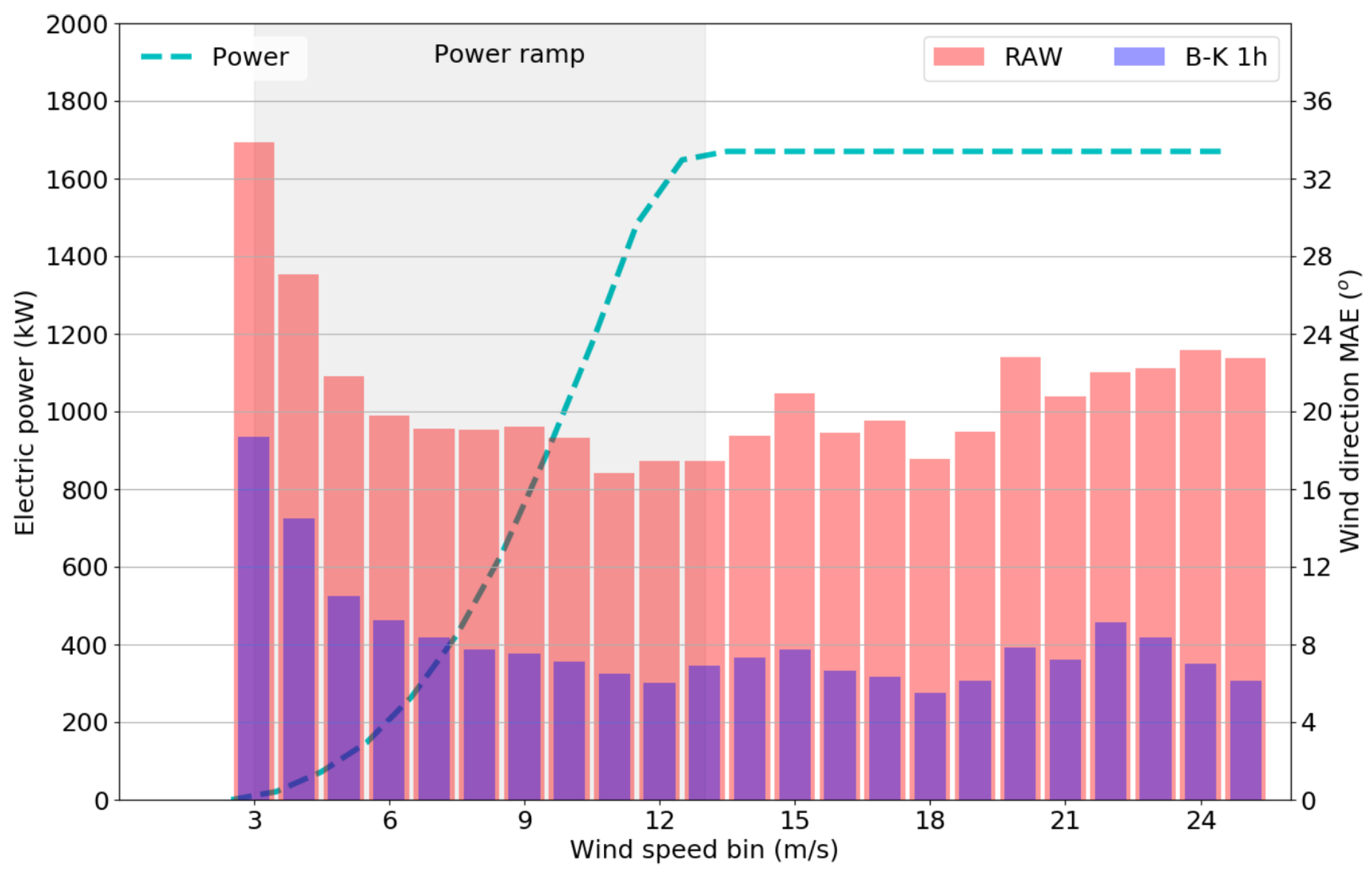
3.3. Application of the K-B Filter for Wind Power Forecasting
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Global Wind Energy Council. Global Wind Report; Technical Report; Global Wind Energy Council: Brussels, Belgium, 2017. [Google Scholar]
- Wind Europe. Wind in Power 2017. Annual Combined Onshore and Offshore Wind Energy Statistics; Technical Report; Wind Europe: Brussels, Belgium, 2018. [Google Scholar]
- Fried, L.; Shukla, S.; Sawyer, S. Growth Trends and the Future of Wind Energy; Elsevier Inc.: Cambridge, MA, USA, 2017; pp. 559–586. [Google Scholar]
- Zhao, J.; Guo, Y.; Xiao, X.; Wang, J.; Chi, D.; Guo, Z. Multi-step wind speed and power forecasts based on a WRF simulation and an optimized association method. Appl. Energy 2017, 197, 183–202. [Google Scholar] [CrossRef]
- Prósper, M.A.; Otero-Casal, C.; Fernández, F.C.; Miguez-Macho, G. Wind power forecasting for a real onshore wind farm on complex terrain using WRF high resolution simulations. Renew. Energy 2019, 135, 674–686. [Google Scholar] [CrossRef]
- Pokharel, B.; Geerts, B.; Chu, X.; Bergmaier, P. Profiling radar observations and numerical simulations of a downslopewind storm and rotor on the lee of the Medicine Bow mountains in Wyoming. Atmosphere 2017, 8, 39. [Google Scholar] [CrossRef]
- Wang, G.M.; Liu, D.F.; Xu, Y.P.; Meng, T.; Zhu, F. PET/CT imaging in diagnosing lymph node metastasis of esophageal carcinoma and its comparison with pathological findings. Eur. Rev. Med. Pharmacol. Sci. 2016, 20, 1495–1500. [Google Scholar] [CrossRef] [PubMed]
- Mughal, M.O.; Lynch, M.; Yu, F.; Sutton, J. Forecasting and verification of winds in an East African complex terrain using coupled mesoscale—And micro-scale models. J. Wind Eng. Ind. Aerodyn. 2018, 176, 13–20. [Google Scholar] [CrossRef]
- Archer, C.L.; Simão, H.P.; Kempton, W.; Powell, W.B.; Dvorak, M.J. The challenge of integrating offshore wind power in the U.S. electric grid. Part I: Wind forecast error. Renew. Energy 2017, 103, 346–360. [Google Scholar] [CrossRef] [Green Version]
- Vanderwende, B.; Lundquist, J.K. Could Crop Height Affect the Wind Resource at Agriculturally Productive Wind Farm Sites? Bound.-Layer Meteorol. 2016, 158, 409–428. [Google Scholar] [CrossRef]
- Division, M.; Sciences, O.; Renewable, N. Mesoscale Influences of Wind Farms throughout a Diurnal Cycle. Mon. Weather Rev. 2013, 141, 2173–2198. [Google Scholar] [CrossRef]
- Jiménez, P.A.; Navarro, J.; Palomares, A.M.; Dudhia, J. Mesoscale modeling of offshore wind turbine wakes at the wind farm resolving scale: A composite-based analysis with the Weather Research and Forecasting model over Horns Rev. Wind Energy 2015, 18, 559–566. [Google Scholar] [CrossRef]
- Muñoz-Esparza, D.; Lundquist, J.K.; Sauer, J.A.; Kosović, B.; Linn, R.R. Coupled mesoscale-LES modeling of a diurnal cycle during the CWEX-13 field campaign: From weather to boundary-layer eddies. J. Adv. Model. Earth Syst. 2017, 9, 1572–1594. [Google Scholar] [CrossRef]
- Rai, R.K.; Berg, L.K.; Kosović, B.; Mirocha, J.D.; Pekour, M.S.; Shaw, W.J. Comparison of Measured and Numerically Simulated Turbulence Statistics in a Convective Boundary Layer Over Complex Terrain. Bound.-Layer Meteorol. 2017, 163, 69–89. [Google Scholar] [CrossRef]
- Muñoz-Esparza, D.; Kosović, B.; Mirocha, J.; van Beeck, J. Bridging the Transition from Mesoscale to Microscale Turbulence in Numerical Weather Prediction Models. Bound.-Layer Meteorol. 2014, 153, 409–440. [Google Scholar] [CrossRef]
- Huang, M.; Wang, Y.; Lou, W.; Cao, S. Multi-scale simulation of time-varying wind fields for Hangzhou Jiubao Bridge during Typhoon Chan-hom. J. Wind Eng. Ind. Aerodyn. 2018, 179, 419–437. [Google Scholar] [CrossRef]
- Kariniotakis, G.N.; Pinson, P. Evaluation of the MORE-CARE wind power prediction platform. Performance of the fuzzy logic based models. In Proceedings of the EWEC 2003—European Wind Energy Conference, Madrid, Spain, 16–19 June 2003. [Google Scholar]
- Kariniotakis, G.; Martí, I.; Casas, D.; Pinson, P.; Nielsen, T.S.; Madsen, H.; Giebel, G.; Usaola, J.; Sanchez, I. What performance can be expected by short-term wind power prediction models depending on site characteristics? In Proceedings of the EWC 2004 Conference, Tokyo, Japan, 2–4 August 2004; pp. 22–25. [Google Scholar]
- Vanem, E. Long-term time-dependent stochastic modelling of extreme waves. Stoch. Environ. Res. Risk Assess. 2011, 25, 185–209. [Google Scholar] [CrossRef]
- Giebel, G. On the Benefits of Distributed Generation of Wind Energy in Europe. Ph.D. Thesis, Carl von Ossietzky Universitat Oldenburg, Oldenburg, Germany, August 2001. [Google Scholar]
- Resconi, G. Geometry of risk analysis (morphogenetic system). Stoch. Environ. Res. Risk Assess. 2009, 23, 425–432. [Google Scholar] [CrossRef]
- Pelland, S.; Galanis, G.; Kallos, G. Solar and photovoltaic forecasting through post-processing of the global environmental multiscale numerical weather prediction model. Prog. Photovolt. Res. Appl. 2011, 21, 284–296. [Google Scholar] [CrossRef]
- Galanis, G.; Louka, P.; Katsafados, P.; Pytharoulis, I.; Kallos, G. Applications of Kalman filters based on non-linear functions to numerical weather predictions. Ann. Geophys. 2006, 24, 2451–2460. [Google Scholar] [CrossRef] [Green Version]
- Galanis, G.; Emmanouil, G.; Chu, P.C.; Kallos, G. A new methodology for the extension of the impact of data assimilation on ocean wave prediction. Ocean Dyn. 2009, 59, 523–535. [Google Scholar] [CrossRef] [Green Version]
- Crochet, P. Adaptive Kalman filtering of 2-metre temperature and 10-metre wind-speed forecasts in Iceland. Meteorol. Appl. 2004, 11, 173–187. [Google Scholar] [CrossRef]
- Galanis, G.; Anadranistakis, M. A one-dimensional Kalman filter for the correction of near surface temperature forecasts. Meteorol. Appl. 2002, 9, 437–441. [Google Scholar] [CrossRef] [Green Version]
- Kalnay, E. Atmospheric Modeling, Data Assimilation, and Predictability; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. J. Basic Eng. 1961, 83, 95. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35. [Google Scholar] [CrossRef]
- Stathopoulos, C.; Kaperoni, A.; Galanis, G.; Kallos, G. Wind power prediction based on numerical and statistical models. J. Wind Eng. Ind. Aerodyn. 2013, 112, 25–38. [Google Scholar] [CrossRef]
- Hua, S.; Wang, S.; Jin, S.; Feng, S.; Wang, B. Wind speed optimisation method of numerical prediction for wind farm based on Kalman filter method. J. Eng. 2017, 2017, 1146–1149. [Google Scholar] [CrossRef]
- Che, Y.; Peng, X.; Monache, L.D.; Kawaguchi, T.; Xiao, F. A wind power forecasting system based on the weather research and forecasting model and Kalman filtering over a wind-farm in Japan. J. Renew. Sustain. Energy 2016, 8, 013302. [Google Scholar] [CrossRef]
- Che, Y.; Xiao, F. An integrated wind-forecast system based on the weather research and forecasting model, Kalman filter, and data assimilation with nacelle-wind observation. J. Renew. Sustain. Energy 2016, 8, 053308. [Google Scholar] [CrossRef]
- Louka, P.; Galanis, G.; Siebert, N.; Kariniotakis, G.; Katsafados, P.; Pytharoulis, I.; Kallos, G. Improvements in wind speed forecasts for wind power prediction purposes using Kalman filtering. J. Wind Eng. Ind. Aerodyn. 2008, 96, 2348–2362. [Google Scholar] [CrossRef] [Green Version]
- Galanis, G.; Papageorgiou, E.; Liakatas, A. A hybrid Bayesian Kalman filter and applications to numerical wind speed modeling. J. Wind Eng. Ind. Aerodyn. 2017, 167, 1–22. [Google Scholar] [CrossRef]
- Zaher, A.; McArthur, S.D.; Infield, D.G.; Patel, Y. Online wind turbine fault detection through automated SCADA data analysis. Wind Energy 2009, 12, 574–593. [Google Scholar] [CrossRef]
- Drew, D.R.; Cannon, D.J.; Barlow, J.F.; Coker, P.J.; Frame, T.H. The importance of forecasting regional wind power ramping: A case study for the UK. Renew. Energy 2017, 114, 1201–1208. [Google Scholar] [CrossRef] [Green Version]
- Lorente-Plazas, R.; Montávez, J.P.; Jimenez, P.A.; Jerez, S.; Gómez-Navarro, J.J.; García-Valero, J.A.; Jimenez-Guerrero, P. Characterization of surface winds over the Iberian Peninsula. Int. J. Climatol. 2015, 35, 1007–1026. [Google Scholar] [CrossRef]
- Santos, J.A.; Rochinha, C.; Liberato, M.L.; Reyers, M.; Pinto, J.G. Projected changes in wind energy potentials over Iberia. Renew. Energy 2015, 75, 68–80. [Google Scholar] [CrossRef]
- Skamarock, W.; Klemp, J.; Dudhi, J.; Gill, D.; Barker, D.; Duda, M.; Huang, X.Y.; Wang, W.; Powers, J. A Description of the Advanced Research WRF Version 3; Technical Report; NCAR: Boulder, CO, USA, 2008. [Google Scholar]
- Wang, W.; Bruyère, C.; Duda, M.; Dudhia, J.; Gill, D.; Kavulich, M.; Keene, K.; Lin, H.C.; Michalakes, J.; Rizvi, S.; et al. ARW Version 3 Modeling System User’s Guide. J. Palest. Stud. 2007, 37, 204–205. [Google Scholar] [CrossRef]
- Shin, H.H.; Hong, S.Y.; Dudhia, J. Impacts of the Lowest Model Level Height on the Performance of Planetary Boundary Layer Parameterizations. Mon. Weather Rev. 2012, 140, 664–682. [Google Scholar] [CrossRef]
- Slater, J.A.; Heady, B.; Kroenung, G.; Curtis, W.; Haase, J.; Hoegemann, D.; Shockley, C.; Tracy, K. Evaluation of the New ASTER Global Digital Elevation Model; National Geospatial-Intelligence Agency: Reston, VA, USA, 2009; pp. 335–349.
- European Environment Agency. CLC2006 Technical Guidelines; European Environment Agency: Copenhagen, Denmark, 2007; Volume 2010, p. 70. [CrossRef]
- Hong, S.; Lim, J. The WRF single-moment 6-class microphysics scheme (WSM6). Asia-Pac. J. Atmos. Sci. 2006, 42, 129–151. [Google Scholar]
- Kain, J.S. The Kain–Fritsch Convective Parameterization: An Update. J. Appl. Meteorol. 2004, 43, 170–181. [Google Scholar] [CrossRef]
- Mlawer, E.J.; Taubman, S.J.; Brown, P.D.; Iacono, M.J.; Clough, S.A. Radiative transfer for inhomogeneous atmospheres: RRTM, a validated correlated-k model for the longwave. J. Geophys. Res. Atmos. 1997, 102, 16663–16682. [Google Scholar] [CrossRef] [Green Version]
- Dudhia, J. Numerical Study of Convection Observed during the Winter Monsoon Experiment Using a Mesoscale Two-Dimensional Model. J. Atmos. Sci. 1989, 46, 3077–3107. [Google Scholar] [CrossRef]
- Nakanishi, M.; Niino, H. An improved Mellor-Yamada Level-3 model: Its numerical stability and application to a regional prediction of advection fog. Bound.-Layer Meteorol. 2006, 119, 397–407. [Google Scholar] [CrossRef]
- Beljaars, A.C. The parametrization of surface fluxes in large-scale models under free convection. Q. J. R. Meteorol. Soc. 1995, 121, 255–270. [Google Scholar] [CrossRef]
- Tewari, M.; Chen, F.; Wang, W.; Dudhia, J.; Lemone, M.A.; Mitchell, K.; Cuenca, R.H.; Springs, C.; Force, A.; Agency, W. Implementation and Verification of The Unified NOAH Land Surface Model In The WRF Model. In Proceedings of the 20th Conference on Weather Analysis and Forecasting/16th Conference on Numerical Weather Prediction, Seattle, WA, USA, 12–16 January 2004. [Google Scholar]
- Fitch, A.C.; Olson, J.B.; Lundquist, J.K.; Dudhia, J.; Gupta, A.K.; Michalakes, J.; Barstad, I. Local and Mesoscale Impacts of Wind Farms as Parameterized in a Mesoscale NWP Model. Mon. Weather Rev. 2012, 140, 3017–3038. [Google Scholar] [CrossRef]
- Patlakas, P.; Drakaki, E.; Galanis, G.; Spyrou, C.; Kallos, G. Wind gust estimation by combining a numerical weather prediction model and statistical post-processing. Energy Procedia 2017, 125, 190–198. [Google Scholar] [CrossRef]
- BOX CEP; Tiao, G.C. Bayesian Inference in Statistical Analysis; Wiley: Hoboken, NJ, USA, 1992. [Google Scholar] [CrossRef]
- Bernardo, J.; Smith, A. Bayesian Theory; Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Kuikka, I. Wind Nowcasting: Optimizing Runway in Use; Technical Report; Helsinki University of Technology Systems Analysis Laboratory: Espoo, Finland, 2009. [Google Scholar]
- Gupta, H.V.; Sorooshian, S.; Yapo, P.O. Status of automatic calibration for hydrologic models: Comparison with multilevel expert calibration. J. Hydrol. Eng. 1999, 4, 135–143. [Google Scholar] [CrossRef]
- Ecotèctnia. Technical Report 74 1.6; Technical Report; ECOTÈCNIA: Barcelona, Spain, 2007. [Google Scholar]
- Utsumi, H.; Misaka, T.; Moteki, W. Prediction Model of Internal Relative Humidity During Self-desiccation in Hardened Cement Pastes. Concr. Res. Technol. 2015, 26, 11–19. [Google Scholar] [CrossRef] [Green Version]
- Van Dijk, M.T.; Van Wingerden, J.W.; Ashuri, T.; Li, Y.; Rotea, M.A. Yaw-Misalignment and its Impact on Wind Turbine Loads and Wind Farm Power Output. J. Phys. Conf. Ser. 2016, 753, 062013. [Google Scholar] [CrossRef]
- Churchfield, M.; Fleming, P. Wind Turbine Wake-Redirection Control at the Fishermen’s Atlantic City Windfarm. Offshore Technol. 2015. [Google Scholar] [CrossRef]
- Landberg, L.; Watson, S.J. Short-term prediction of local wind conditions. Bound.-Layer Meteorol. 1994, 70, 171–195. [Google Scholar] [CrossRef]
- Joensen, A.; Giebel, G.; Landberg, L.; Madsen, H.; Neilsen, H. Model output statistics applied to wind power prediction. In Proceedings of the EWEC-Conference, Nice, France, 1–5 March 1999; pp. 1177–1180. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microphysics | Single-moment six-class scheme [45] |
| Cumulus Parameterization | Kain-Fritsch scheme [46] disabled in d04 and d05 |
| Long wave radiation physics | RRTM Longwave model [47] |
| Short wave radiation physics | Dudhia shortwave radiation schemes [48] |
| Planetary boundary layer | Mellor–Yamada Nakanishi Niino Level 2.5 [49] |
| Surface layer option | Revised MM5 Monin-Obukhov scheme [50] |
| Land-surface physics | Noah land-surface model [51] |
| Wind Turbine Parameterization | Fitch, A. C. 2012 [11] |
| Experiment | Description |
|---|---|
| RAW | WRF results without post-proccess |
| K-B 6 h | K-B filter nowcasting used for 6 h time horizon |
| K-B 1 h | K-B filter nowcasting used for 1 h time horizon |
| K-B 30 min | K-B filter nowcasting used for 30 min time horizon |
| K-B 10 min | K-B filter nowcasting used for 10 min time horizon |
| (a) WS ME (m/s) | |||||
| RAW | K-B 6 h | K-B 1 h | K-B 30 min | K-B 10 min | |
| WT2 | −0.419 | 0.026 | 0.017 | 0.009 | 0.004 |
| WT7 | −0.446 | 0.011 | 0.016 | 0.009 | 0.004 |
| WT13 | −0.331 | 0.102 | 0.014 | 0.008 | 0.006 |
| WT16 | −0.590 | 0.069 | 0.025 | 0.013 | 0.006 |
| WT24 | −0.449 | 0.019 | 0.021 | 0.013 | 0.006 |
| WT26 | −1.400 | 0.048 | 0.022 | 0.012 | 0.004 |
| TOTAL | −0.605 | 0.046 | 0.019 | 0.011 | 0.005 |
| (b) WS RMSE (m/s) | |||||
| RAW | K-B 6 h | K-B 1 h | K-B 30 min | K-B 10 min | |
| WT2 | 2.426 | 2.376 | 1.411 | 1.194 | 0.986 |
| WT7 | 2.508 | 2.325 | 1.413 | 1.199 | 0.990 |
| WT13 | 2.528 | 2.498 | 1.445 | 1.219 | 1.001 |
| WT16 | 2.425 | 2.322 | 1.435 | 1.226 | 1.019 |
| WT24 | 2.327 | 2.189 | 1.370 | 1.170 | 0.969 |
| WT26 | 3.009 | 2.449 | 1.464 | 1.237 | 1.022 |
| TOTAL | 2.537 | 2.359 | 1.423 | 1.207 | 0.998 |
| Mean Monthly WS /Mean Annual WS | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| January | February | March | April | May | June | July | August | September | October | November | December |
| 1.4 | 1.16 | 0.97 | 0.85 | 1.07 | 0.77 | 0.8 | 0.76 | 0.83 | 1.02 | 0.88 | 1.48 |
| Power Ramp Winds (49.7%) Wind Dir. MAE () | ||||
|---|---|---|---|---|
| North | Center | South | Total | |
| Per. 10 min | 6.54 | 6.32 | 6.96 | 6.61 |
| Per. 30 min | 8.49 | 8.31 | 8.84 | 8.55 |
| Per. 1 h | 10.07 | 9.92 | 10.47 | 10.15 |
| K-B 10 min | 6.65 | 6.52 | 6.91 | 6.70 |
| K-B 30 min | 7.45 | 7.35 | 7.71 | 7.51 |
| K-B 1 h | 8.33 | 8.26 | 8.56 | 8.38 |
| K-B 6 h | 13.59 | 13.71 | 14.10 | 13.80 |
| RAW | 16.07 | 19.54 | 22.81 | 19.47 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Otero-Casal, C.; Patlakas, P.; Prósper, M.A.; Galanis, G.; Miguez-Macho, G. Development of a High-Resolution Wind Forecast System Based on the WRF Model and a Hybrid Kalman-Bayesian Filter. Energies 2019, 12, 3050. https://doi.org/10.3390/en12163050
Otero-Casal C, Patlakas P, Prósper MA, Galanis G, Miguez-Macho G. Development of a High-Resolution Wind Forecast System Based on the WRF Model and a Hybrid Kalman-Bayesian Filter. Energies. 2019; 12(16):3050. https://doi.org/10.3390/en12163050
Chicago/Turabian StyleOtero-Casal, Carlos, Platon Patlakas, Miguel A. Prósper, George Galanis, and Gonzalo Miguez-Macho. 2019. "Development of a High-Resolution Wind Forecast System Based on the WRF Model and a Hybrid Kalman-Bayesian Filter" Energies 12, no. 16: 3050. https://doi.org/10.3390/en12163050