
Game of Life-like Opinion Dynamics: Generalizing the Underpopulation Rule


Abstract
1. Introduction
- Related literature. The study of various aspects of graph dynamics has received very wide attention in the literature, and a detailed discussion of papers and results about this topic is out of the scope of this paper. Broadly speaking, two scenarios may be identified in this setting.
- Paper contribution. This paper is devoted to the study of the generalization of the underpopulation rule to signed and directed graphs. Both the underpopulation rule and the deterministic major dynamics are special occurrences of local threshold-based dynamics: indeed, as it will become clear in the next section, the underpopulation rule occurs by choosing and , that is, as two constant functions, while the deterministic majority dynamics occurs by choosing and . Hence, on the majority dynamics side, the amount of a node’s neighbors in a given opinion needed to make that node change or keep its current opinion linearly increases with the node degree, while such an amount is independent of the node degree in the underpopulation rule.
- Like in the majority dynamics case, unless P = PSpace, the total number of opinion configurations an unsigned directed graph enters while evolving according to an underpopulation rule is not polynomially bounded in the size of the graph, and this is true even when the maximum indegree of the graph is 6 and and .
- The total number of opinion configurations a structurally balanced undirected graph enters while evolving according to an underpopulation rule is polynomially bounded in the size of the graph.
2. Results
- For , ;
- There exists such that .
3. Proofs
3.1. Proof of Theorem 1: Polynomial Bound to in Structurally Balanced Graphs
3.1.1. First Step: Symmetric Dynamics and Support Graphs
- if then and, hence, if and only if ,
- if then and, hence, if and only if .
- If and thenso that -supports . On the other hand, if and then and , so that .Similarly, if and , then so that , that is, -supports . On the other hand, if and then and , so that .
- If and then , so that does not -support . On the other hand, if and then and , so that , that is, .
3.1.2. Second Step: Structurally Balanced Graphs
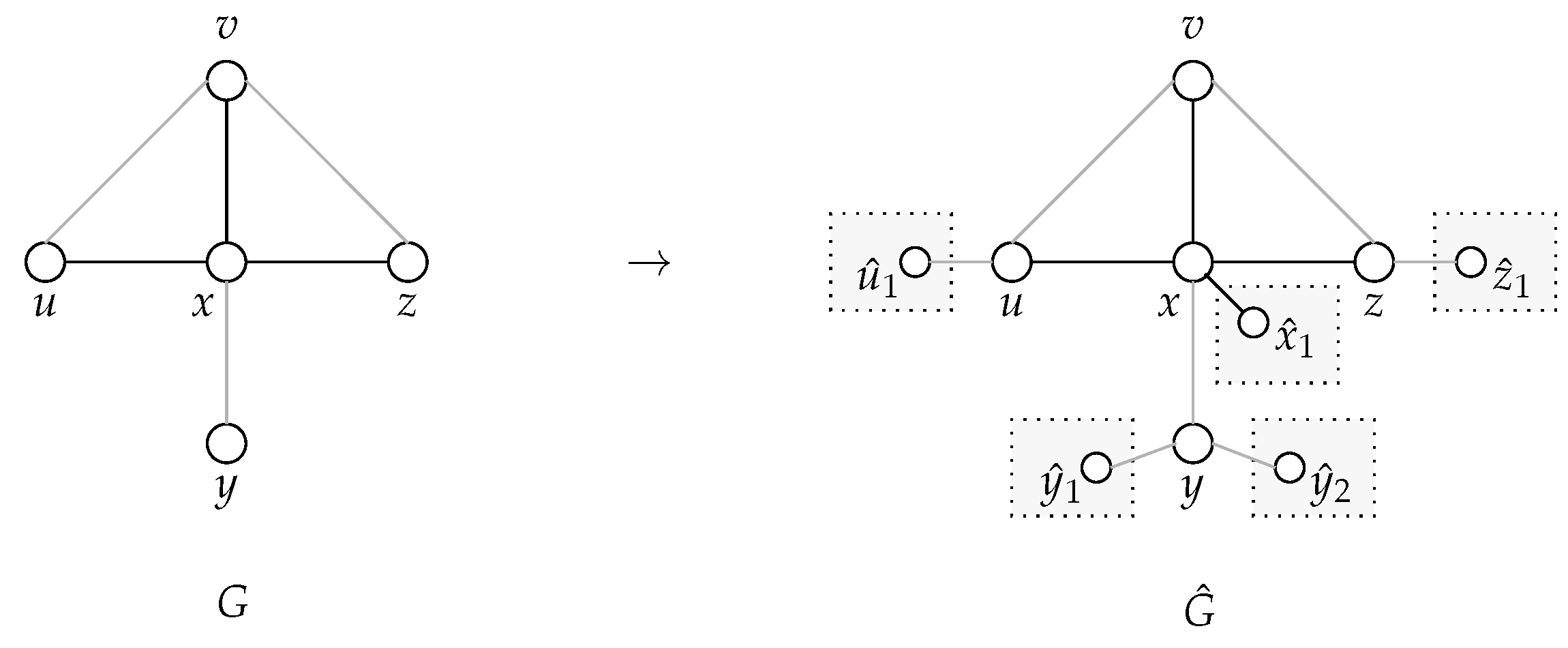
- set and ;
- set and ;
- while , repeat the following steps
- –
- set and ;
- –
- for each and for each , set , and .
- -
- If then the path contains an odd number of edges e such that . Furthermore, since , then and, hence, the number of edges e in the path such that is even. This would imply that the number of edges e in C such that is odd, so contradicting that is structurally balanced.
- -
- If , then the path contains an even number of edges e such that . Furthermore, since , then and, hence, the number of edges e in the path such that is odd. Again, this would imply that the number of edges e in C is such that is odd.
3.1.3. Summarizing
3.2. Proof of Theorem 2: Polynomial Bound to in Structurally Balanced Graphs
- If and then: and , and and ; hence, if and only if .
- If and then , and .
- If and then: and so that , and .
- If then
- –
- if then and, hence, ;
- –
- if then and, hence, .
- If then
- –
- if then and, hence,
- –
- if then and, hence,
3.3. Proofs of Theorem 3: u-RT Is PSpace-Complete in Directed Graphs
- An oriented unsigned graph ;
- An opinion configurations for G;
- A subset U of V.
3.3.1. Connecting Components of G
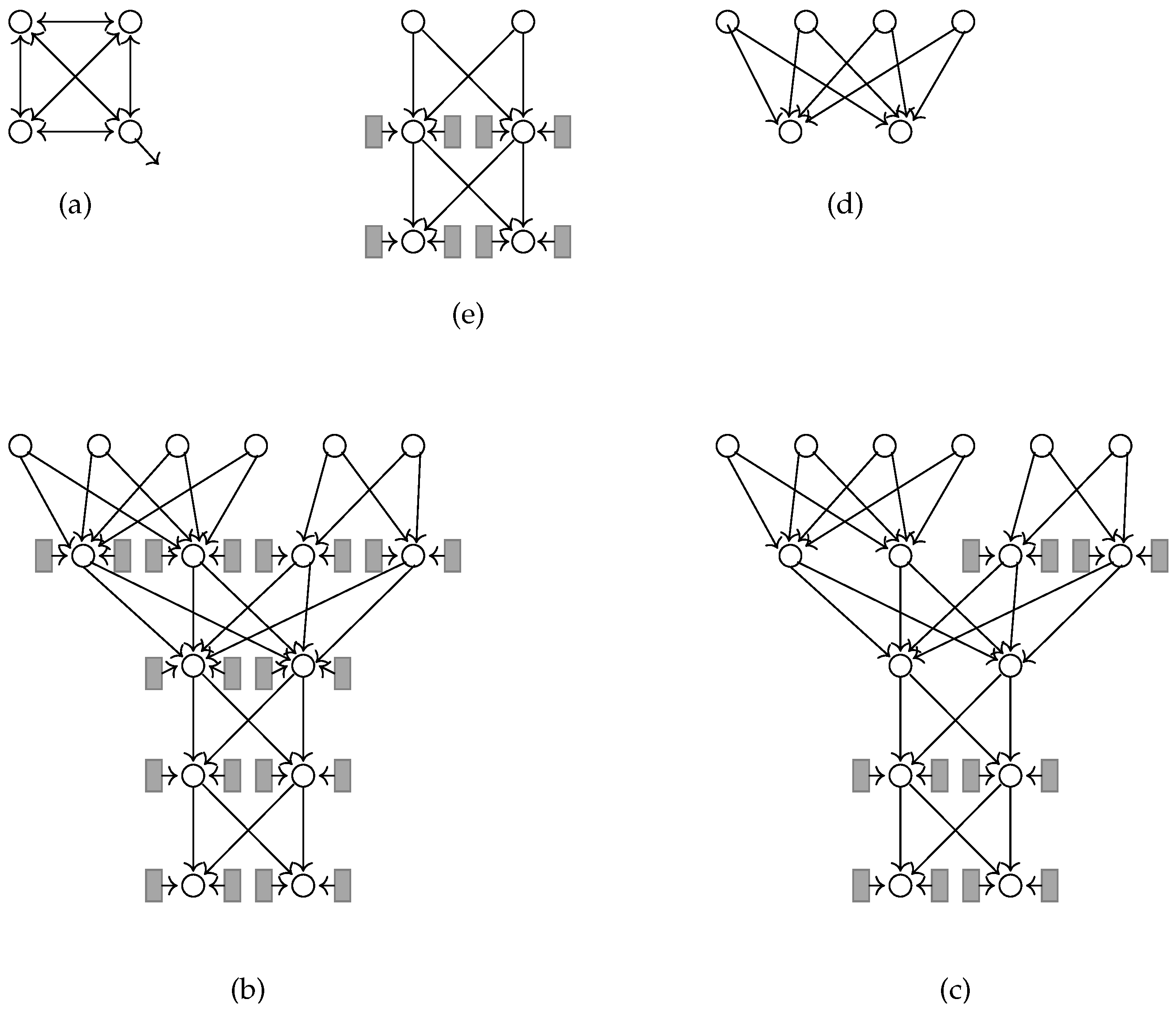
- if , for , layer i contains the pairs of nodes ; each node in the first pair has an incoming arc from each node in the first 2 pairs of nodes of layer and, for , each node in the jth pair of nodes has an incoming arc from each node of the th pair of layer
- if , for , layer i contains the pair of nodes with each such node having an incoming arc from each node in layer .
- If there exists a level i of H such that both nodes of a pair in level i of H have a positive opinion at ω, then for every , all descendants of such nodes in level obtain a positive opinion at step t of the dynamic process.Formally, if there exist and such that then, for any , where .
- If there exists a level i of H such that all nodes in level i of H have a negative opinion at ω then, for every , all nodes in level obtain a negative opinion at step t of the dynamic process.Formally, if there exists such that, for every , then, for any and for any , .
- If there exists a level i of H such that both nodes of a pair in level i of H have a negative opinion at ω then, for every , all descendants of such nodes in level obtain a negative opinion at step t of the dynamic process.Formally, if there exist and such that then, for any , where ;
- If there exists a level i of H such that all nodes in level i of H have a positive opinion at ω then, for every , all nodes in level obtain a positive opinion at step t of the dynamic process.Formally, if there exists such that, for every , then, for any and for any , .
3.3.2. Graph G
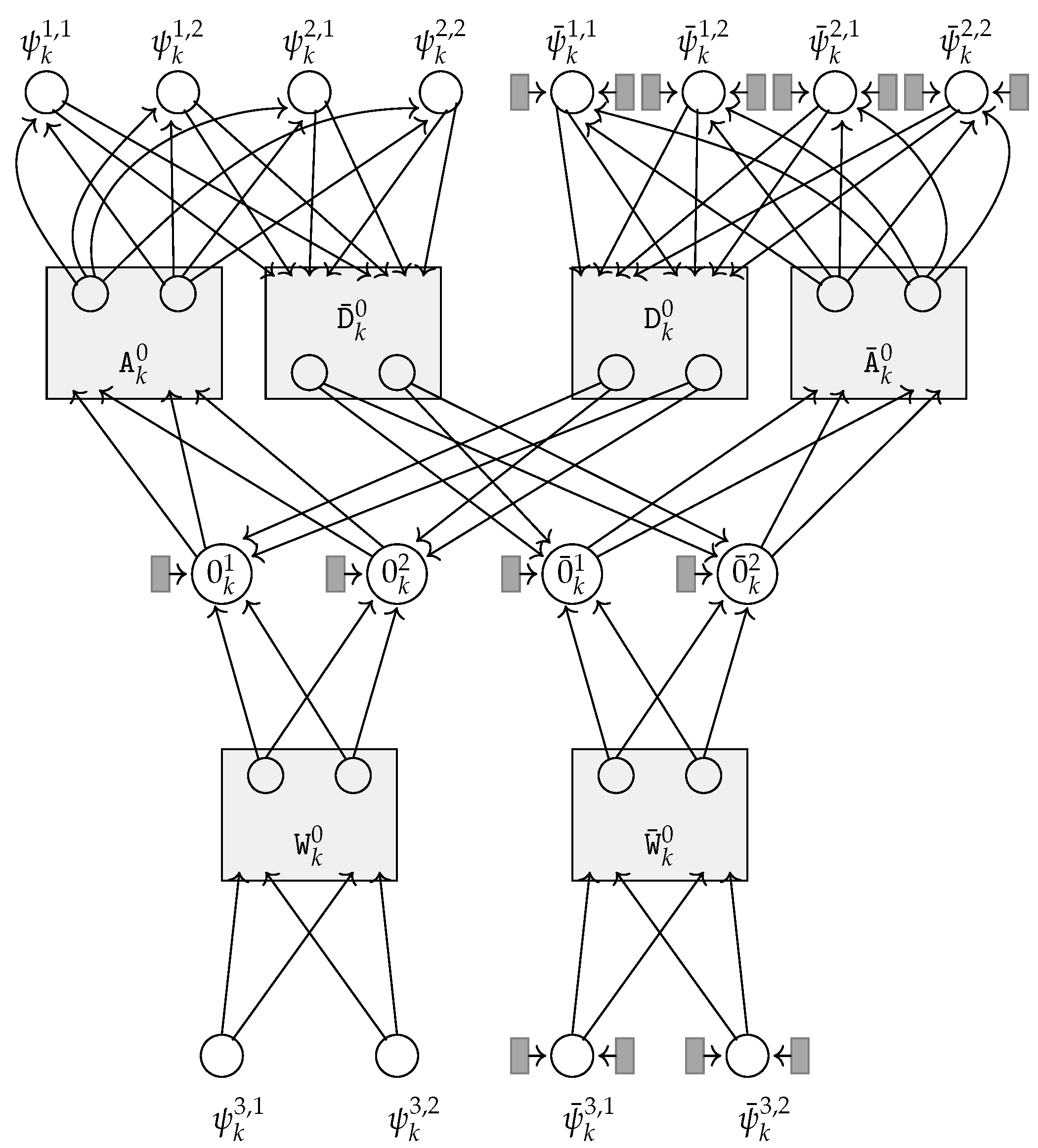
- Subgraph , with .consists of the following set of acting nodes: the cell nodes , , , , and and , , , , and , designed to describe the content of tape cell k of , and, for , the quintuple nodes, , and , designed to point out which quintuple of is to be executed at any step of the computation when the head tape of reads cell k.
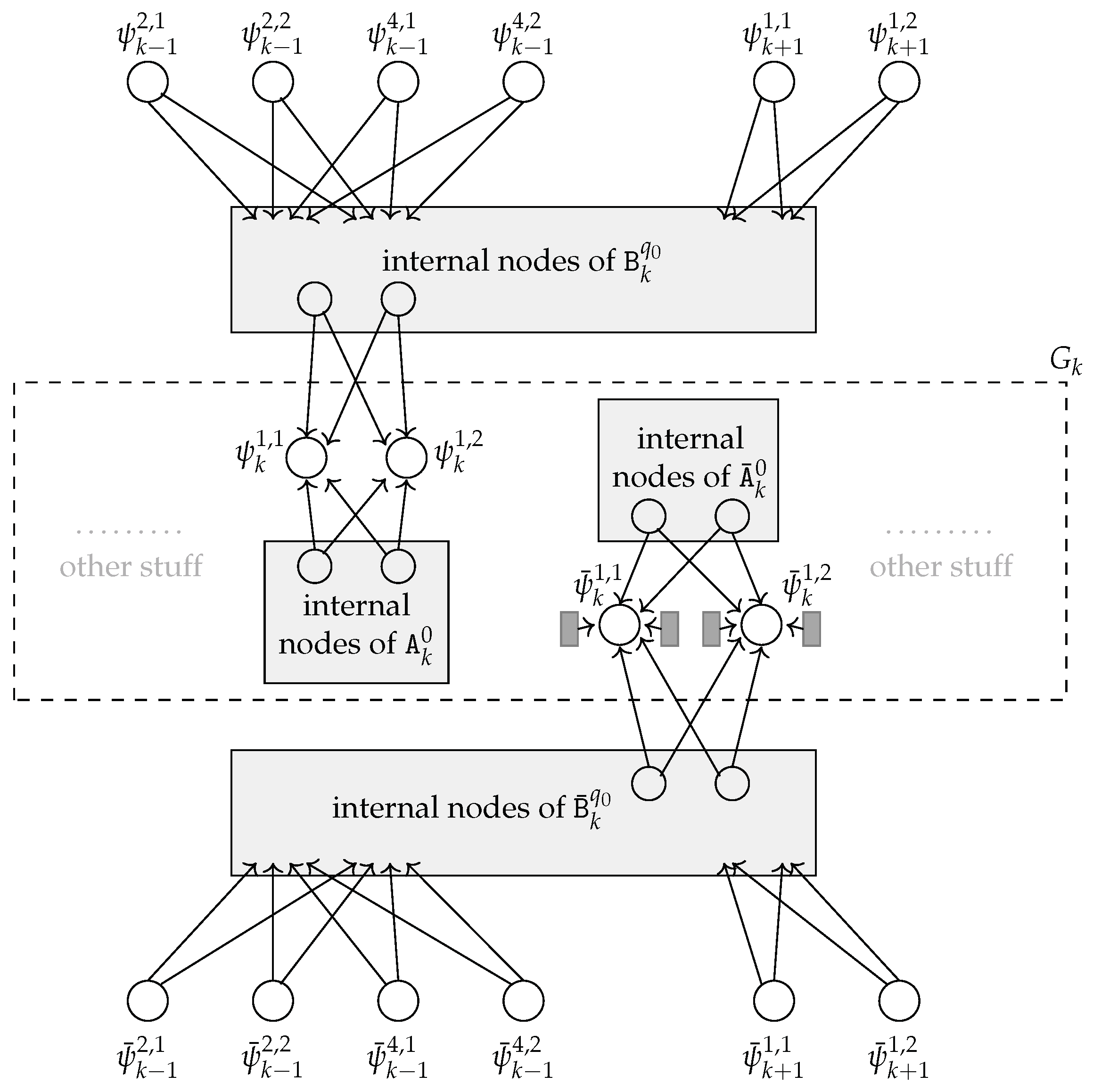
- Subgraph .consists of the -selector , having as outputs, the acting starting nodes , , of the the -selector having as outputs the acting starting nodes and , and of the acting accepting node . The input nodes of have indegree 0 in G, the in-neighbors of each input node of are the output nodes of 4 stable cliques, and the output nodes of 2 stable cliques are in-neighbors of . In Figure 5, an example of the subgraph is shown (together with its connections to that will be described in a few lines).

- Connections among subgraphs. They connect quintuple-nodes in (or , , and if ) to quintuple-nodes in or . For every , we have the following:
- denotes the set of indexes of the quintuples in P ending at q and moving right, that is,
- Similarly, denotes the set of indexes of the quintuples in P ending at q and moving left, that is, ;
- denotes the set of indexes of the quintuples in P starting at q, that is, .
- For every : for every , G contains a -selector and a -reverse selector such that
- -
- is the input set of and each output of its is an in-neighbor of both and for every ,
- -
- is the input set of and each output of its is and in-neighbor of both and for every .
- For : G contains the -selector , the -reverse selector , and, for every , the -selector and the -reverse selector such that
- -
- if then the input and the output sets of and of are identically defined as for ,
- -
- if then is the input set of and each output of its is an in-neighbor of both and for every ; similarly, is the input set of and each output of its is and in-neighbor of both and for every .
Denote as the set of indexes of the quintuples in P ending at (namely, if and only if ). G finally contains the -selector having as its input set and each output of which has an outgoing arc to .
- For : for every , G contains the -selector and the -reverse selector such that
- -
- is the input set of and each output of its is an in-neighbor of both and for every ,
- -
- is the input set of and each output of its is and in-neighbor of both and for every .
3.3.3. Global States and Mirroring Configurations
- For every and for every , if cell k contains u in S then and is positive or is positive, and, symmetrically, and is negative or is negative;
- For every and for every , if cell k does not contain u in S then and is negative or is negative, and, symmetrically, and is positive or is positive;
- For every and for every , if in S the head of is positioned on cell k, the internal state of is , and cell k contains then and is positive and is positive, and, symmetrically, and is negative and is negative;
- For every and for every , if in S the head of is not positioned on cell k or the internal state of is not or cell k does not contain then and is negative (if is not in state ) or is negative (if the head of is not positioned on cell k), and, symmetrically, and is positive or is positive;
- , and every stable clique is positive under .
- If or then v has 5 in-neighbors (the pair of outputs of , the pair of outputs of and the output of a stable clique). As a consequence, we have the following:
- –
- If then is positive or is positive so that, by Property 4, at least 3 in-neighbors of v push it to 1 at for any and, hence, for any ;
- –
- If then is negative or is negative so that, by Property 4, at most 3 in-neighbors of v push it to 1 at for any and, hence, for any ;
- If or then, again, v has 5 in-neighbors (the pair of outputs of , the pair of outputs of and the output of a stable clique). As a consequence, we have the following:
- –
- If then is positive or is positive so that, by Property 4, at least 3 in-neighbors of v push it to 1 at for any and, hence, for any ;
- –
- If then is negative or is negative so that, by Property 4, at most 3 in-neighbors of v push it to 1 at for any and, hence, for any ;
- If or then v has 4 in-neighbors (the pair of outputs of and the pair of outputs of ). As a consequence, we have the following:
- –
- If then is positive and is positive so that, by Property 4, all the 4 in-neighbors of v push it to 1 at for any and, hence, for any ;
- –
- If then is negative or is negative so that, by Property 4, at most 2 of the 4 in-neighbors of v push it to 1 at for any and, hence, for any ;
- If or then v has 6 in-neighbors (the pair of outputs of , the pair of outputs of and the output nodes of 2 stable cliques). As a consequence, we have the following:
- –
- If then is positive or is positive so that, by Property 4, at least 4 in-neighbors of v push it to 1 at for any and, hence, for any ;
- –
- If then is negative and is negative so that, by Property 4, at most 2 of the 6 in-neighbors of v push it to 1 at for any and, hence, for any .
- If and (), since and then and are in the input set of and and are not in the input set of and, hence, the opinion of both the outputs of and the outputs of at is so that ;
- If and or if , then and are not in the input set of the selector and and are not in the input set of the reverse selector and, hence, the opinion of the outputs of is and the opinion of the outputs of is 1 at ; hence, since exactly 3 in-neighbors push and to 1 at , this implies that and, by Property 5, .
- If and () then ;
- If and () then ;
- If and or if then .
- if and then, on one side, it is and, on the other side, the pair of inputs and of have opinion 1 at so that is positive under ; symmetrically, and a pair of inputs of have opinion at so that is negative under ;
- Similar to before, it can be proved that if and then is negative and is positive under , and that if or , then is negative, is positive, is positive and is negative under .
3.3.4. Finishing the Reduction
- We set for all nodes v in , in and ;
- We set for all nodes v in , in and .
- If and or if and then we set for all nodes v in and we set for all nodes v in ;
- If and or if and then we set for all nodes v in and we set for all nodes v in .
- and for every and ;
- is positive and is negative at , and is negative and is negative at , for every and ;
- and for every pair such that and and or ;
- is negative and is positive for every pair such that and .
3.4. Proof of Corollary 1: Unlikeliness of a Polynomial Bound to in Directed Graphs
4. Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shang, K.; Small, M.; Yan, W. Link direction for link prediction. Phys. A Stat. Mech. Appl. 2017, 469, 767–776. [Google Scholar] [CrossRef]
- Easley, D.; Kleinberg, J. Networks, Crowds, and Markets: Reasoning about a Highly Connected World; Cambridge University Press: Cambridge, UK, 2010; pp. 107–132. [Google Scholar]
- Becchetti, L.; Clementi, A.; Natale, E. Consensus Dynamics: An Overview. ACM SIGACT News 2020, 51, 58–104. [Google Scholar] [CrossRef]
- French, J.R.P. A formal theory of social power. Psychol. Rev. 1956, 63, 181–194. [Google Scholar] [CrossRef]
- Degroot, M.H. Reaching a Consensus. J. Am. Stat. Assoc. 1974, 69, 118–121. [Google Scholar] [CrossRef]
- Galam, S. Minority opinion spreading in random geometry. Eur. Phys. J. B Condens. Matter Complex Syst. 2002, 25, 403–406. [Google Scholar] [CrossRef]
- Lewenstein, M.; Nowak, A.; Latané, B. Statistical mechanics of social impact. Phys. Rev. A 1992, 45, 763–776. [Google Scholar] [CrossRef]
- Peralta, A.F.; Kertész, J.; Iñiguez, G. Opinion dynamics in social networks: From models to data. arXiv 2022, arXiv:2201.01322. [Google Scholar]
- Li, Y.; Chen, W.; Wang, Y.; Zhang, Z.L. Voter Model on Signed Social Networks. Internet Math. 2015, 11, 93–133. [Google Scholar] [CrossRef]
- Shi, G.; Proutière, A.; Johansson, M.; Baras, J.S.; Johansson, K.H. The Evolution of Beliefs over Signed Social Networks. Oper. Res. 2016, 64, 585–604. [Google Scholar] [CrossRef]
- He, G.; Ruan, H.; Wu, Y.; Liu, J. Opinion Dynamics With Competitive Relationship and Switching Topologies. IEEE Access 2021, 9, 3016–3025. [Google Scholar] [CrossRef]
- Lin, X.; Jiao, Q.; Wang, L. Competitive diffusion in signed social networks: A game-theoretic perspective. Automatica 2020, 12, 108656. [Google Scholar] [CrossRef]
- Goles, E.; Olivos, J. Periodic behavior of generalized threshold functions. Discret. Math. 1980, 30, 187–190. [Google Scholar] [CrossRef]
- Chatterjee, K.; Ibsen-Jensen, R.; Jecker, I.; Svoboda, J. Simplified Game of Life: Algorithms and Complexity. In Proceedings of the 45th International Symposium on Mathematical Foundations of Computer Science, Prague, Czech Republic, 24–28 August 2020; pp. 22:1–22:13. [Google Scholar]
- Gardener, M. Mathematical games: The fantastic combinations of John Conway’s new solitaire game “life”. Sci. Am. 1970, 223, 120–123. [Google Scholar] [CrossRef]
- Di Ianni, M. Opinion Evolution among friends and foes: The deterministic Majority Rule. arXiv 2022, arXiv:2211.17159. [Google Scholar]
- Morone, F.; Makse, H. Influence maximization in complex networks through optimal percolation. Nature 2015, 524, 65–68. [Google Scholar] [CrossRef]
- Erkol, S.; Castellano, C.; Radicchi, F. Systematic comparison between methods for the detection of influential spreaders in complex networks. Sci. Rep. 2019, 9, 15095. [Google Scholar] [CrossRef]
- Parmer, T.; Rocha, L.M.; Radicchi, F. Influence maximization in Boolean networks. Nat. Commun. 2022, 13, 3457. [Google Scholar] [CrossRef]
- Holley, R.A.; Liggett, T.M. Ergodic theorems for weakly interacting infinite systems and the voter model. Ann. Probab. 1975, 3, 643–663. [Google Scholar] [CrossRef]
- Granovetter, M. Threshold models of collective behavior. Am. J. Sociol. 1978, 83, 1420–1443. [Google Scholar] [CrossRef]
- Goldenberg, J.; Libai, B.; Muller, E. Talk of the network: A complex systems look at the underlying process of word-of-mouth. Mark. Lett. 2001, 12, 211–223. [Google Scholar] [CrossRef]
- Kempe, D.; Kleinberg, J.; Tardos, É. Maximizing the Spread of Influence Through a Social Network. In Proceedings of the Ninth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Washington, DC, USA, 24–27 August 2003; pp. 137–146. [Google Scholar]
- Chen, W.; Collins, A.; Cummings, R.; Ke, T.; Liu, Z.; Rincon, D.; Sun, X.; Wang, Y.; Wei, W.; Yuan, Y. Influence maximization in social networks when negative opinions may emerge and propagate. In Proceedings of the 11th SIAM International Conference on Data Mining, Mesa, AZ, USA, 28–30 April 2011; pp. 379–390. [Google Scholar]
- Nazemian, A.; Taghiyareh, F. Influence maximization in independent cascade model with positive and negative word of mouth. In Proceedings of the 6th International Symposium on Telecommunications (IST), Tehran, Iran, 6–8 November 2012; pp. 854–860. [Google Scholar]
- Stich, L.; Golla, G.; Nanopoulos, A. Modelling the spread of negative word-of-mouth in online social networks. J. Decis. Syst. 2014, 23, 203–221. [Google Scholar] [CrossRef]
- Yang, S.; Wang, S.; Truong, V.A. Online Learning and Optimization Under a New Linear-Threshold Model with Negative Influence. arXiv 2019, arXiv:1911.03276. [Google Scholar]
- Ahmed, S.; Ezeife, C.I. Discovering influential nodes from trust network. In Proceedings of the 28th Annual ACM Symposium on Applied Computing, Coimbra, Portugal, 18–22 March 2013; pp. 121–128. [Google Scholar]
- Li, Y.; Chen, W.; Wang, Y.; Zhang, Z.L. Influence diffusion dynamics and influence maximization in social networks with friend and foe relationships. In Proceedings of the Sixth ACM International Conference on Web Search and Data Mining, Rome, Italy, 4–8 February 2013; pp. 657–666. [Google Scholar]
- Di Ianni, M.; Varricchio, G. Latency-Bounded Target Set Selection in Signed Networks. Algorithms 2020, 13, 32. [Google Scholar] [CrossRef]
- Galhotra, S.; Arora, A.; Roy, S. Holistic influence maximization: Combining scalability and efficiency with opinion-aware models. In Proceedings of the 2016 International Conference on Management of Data, San Francisco, CA, USA, 26 June–1 July 2016; pp. 743–758. [Google Scholar]
- Hosseini-Pozveh, M.; Zamanifar, K.; Naghsh-Nilchi, A.R.; Dolog, P. Maximizing the spread of positive influence in signed social networks. Intell. Data Anal. 2016, 20, 199–218. [Google Scholar] [CrossRef]
- Auletta, V.; Ferraioli, D.; Greco, G. On the Complexity of Opinion Consensus under Majority Dynamics. In Proceedings of the 20th Italian Conference on Theoretical Computer Science (ICTCS), Como, Italy, 9–11 September 2019; pp. 104–109. [Google Scholar]
- Auletta, V.; Ferraioli, D.; Greco, G. Reasoning about Consensus when Opinions Diffuse through Majority Dynamics. In Proceedings of the 27th International Joint Conference on Artificial Intelligence (IJCAI), Stockholm, Sweden, 13–19 July 2018; pp. 49–55. [Google Scholar]
- Auletta, V.; Fanelli, A.; Ferraioli, D. Consensus in opinion formation processes in fully evolving environments. In Proceedings of the 33rd Conference on Artificial Intelligence (AAAI), Honolulu, HI, USA, 27 January–1 February 2019; pp. 6022–6029. [Google Scholar]
- Auletta, V.; Ferraioli, D.; Greco, G. On the complexity of reasoning about opinion diffusion under majority dynamics. Artif. Intell. 2020, 284, 103288. [Google Scholar] [CrossRef]
- Chakraborti, D.; Kim, J.H.; Lee, J.; Tran, T. Majority dynamics on sparse random graphs. arXiv 2021, arXiv:2105.12709. [Google Scholar]
- Sah, A.; Sawhney, M. Majority Dynamics: The Power of One. arXiv 2021, arXiv:2105.13301. [Google Scholar]
- Auletta, V.; Caragiannis, I.; Ferraioli, D.; Galdi, C.; Persiano, G. Minority Becomes Majority in Social Networks. In Proceedings of the 11th Conference on Web and Internet Economics (WINE), Amsterdam, The Netherlands, 9–12 December 2015; pp. 74–88. [Google Scholar]
- Acar, E.; Greco, G.; Manna, M. Group Reasoning in Social Environments. In Proceedings of the 16th Conference on Autonomous Agents and MultiAgent Systems (AAMAS), Sao Paulo, Brazil, 8–12 May 2017; pp. 1296–1304. [Google Scholar]
- Auletta, V.; Ferraioli, D.; Greco, G. Optimal majority dynamics for the diffusion of an opinion when multiple alternatives are available. Theor. Comput. Sci. 2021, 869, 156–180. [Google Scholar] [CrossRef]
- Qin, J.; Ma, Q.; Shi, Y.; Wang, L. Recent Advances in Consensus of Multi-Agent Systems: A Brief Survey. IEEE Trans. Ind. Electron. 2017, 64, 4972–4983. [Google Scholar] [CrossRef]
- Frischknecht, S.; Keller, B.; Wattenhofer, R. Convergence in (Social) Influence Networks. In Proceedings of the 27th International Symposium on Distributed Computing (DISC), Jerusalem, Israel, 14–18 October 2013; Volume 8205, pp. 433–446. [Google Scholar]
- Altafini, C. Consensus problems on networks with antagonistic interactions. IEEE Trans. Autom. Control. 2013, 58, 935–946. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning |
|---|---|
| arc/edge sign function | |
| (and sometimes ) | opinion configuration |
| generic opinion dynamics | |
| for , | the application of dynamics for t times |
| ( is the opinion configuration met by G after | |
| t steps of its -evolution starting at ) | |
| local threshold-based opinion dynamics ruled by | |
| and | |
| symmetric dynamics ruled by | |
| ( with and ) | |
| underpopulation opinion dynamics ruled by | |
| ( with and ) | |
| sequence of distinct opinion configurations met by graph G | |
| while evolving according to dynamics | |
| (it becomes , , | |
| in the specific dynamics) | |
| u-RT | the problem of deciding if exists |
| such that for all , given: dynamics , | |
| graph G, opinion configuration , subset of nodes U. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Ianni, M. Game of Life-like Opinion Dynamics: Generalizing the Underpopulation Rule. AppliedMath 2023, 3, 10-36. https://doi.org/10.3390/appliedmath3010002
Di Ianni M. Game of Life-like Opinion Dynamics: Generalizing the Underpopulation Rule. AppliedMath. 2023; 3(1):10-36. https://doi.org/10.3390/appliedmath3010002
Chicago/Turabian StyleDi Ianni, Miriam. 2023. "Game of Life-like Opinion Dynamics: Generalizing the Underpopulation Rule" AppliedMath 3, no. 1: 10-36. https://doi.org/10.3390/appliedmath3010002
APA StyleDi Ianni, M. (2023). Game of Life-like Opinion Dynamics: Generalizing the Underpopulation Rule. AppliedMath, 3(1), 10-36. https://doi.org/10.3390/appliedmath3010002