
On the Exact Solution of Nonlocal Euler–Bernoulli Beam Equations via a Direct Approach for Volterra-Fredholm Integro-Differential Equations

Abstract
:1. Introduction
2. Operator Method for Solving VFIDE
3. The Two Phase Nonlocal Integral Euler–Bernoulli Beam Model
4. Formulation and Solution of the Problem
4.1. Solution of DBVP
4.2. Solution of FIDBVP
4.3. Algorithm
| Algorithm 1 Algorithm for solving the fourth order boundary value problem (23), (25) with the Helmholtz type kernel (22). |
input compute if compute print
else print ‘There is no unique solution’ end |
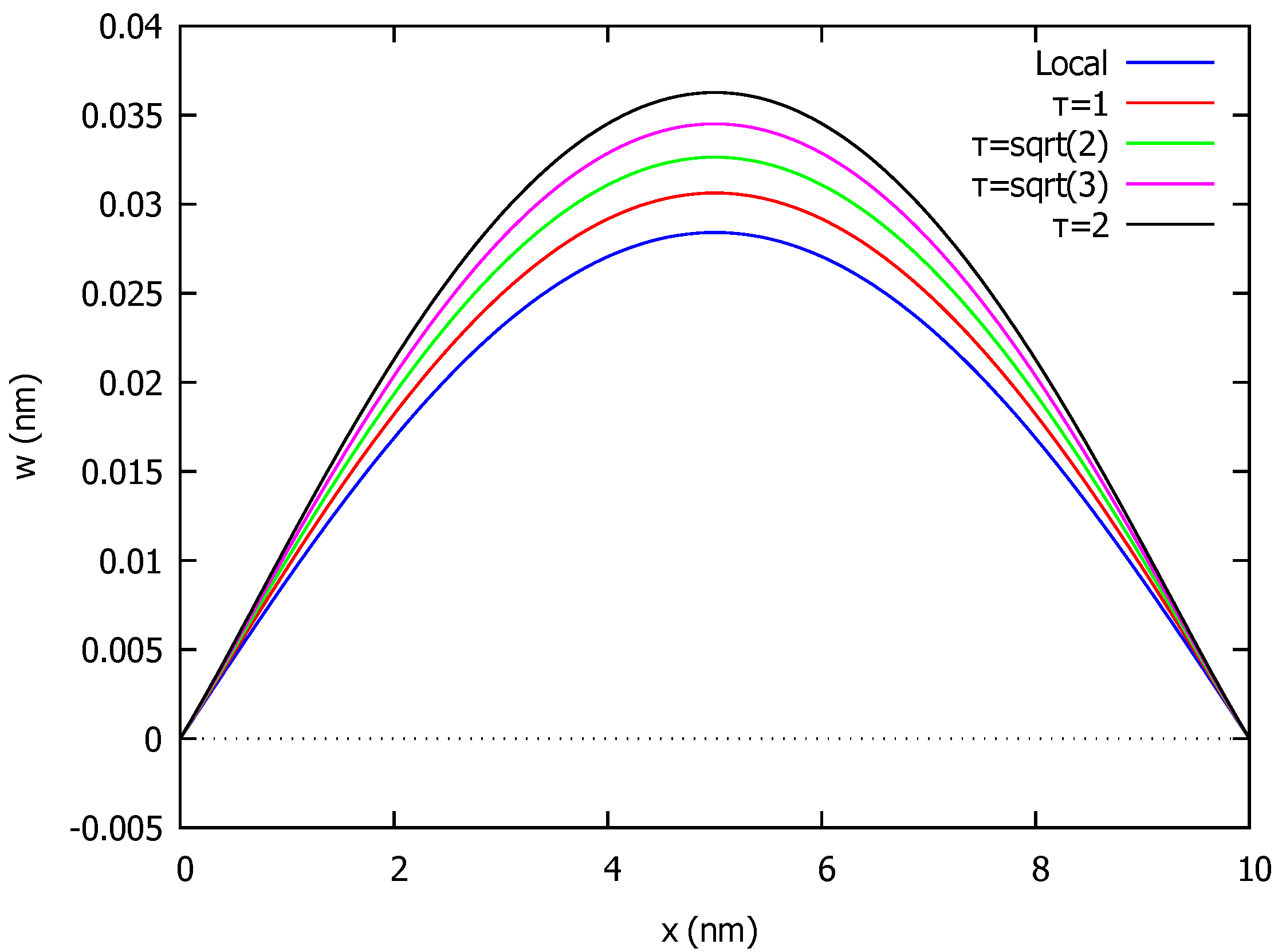
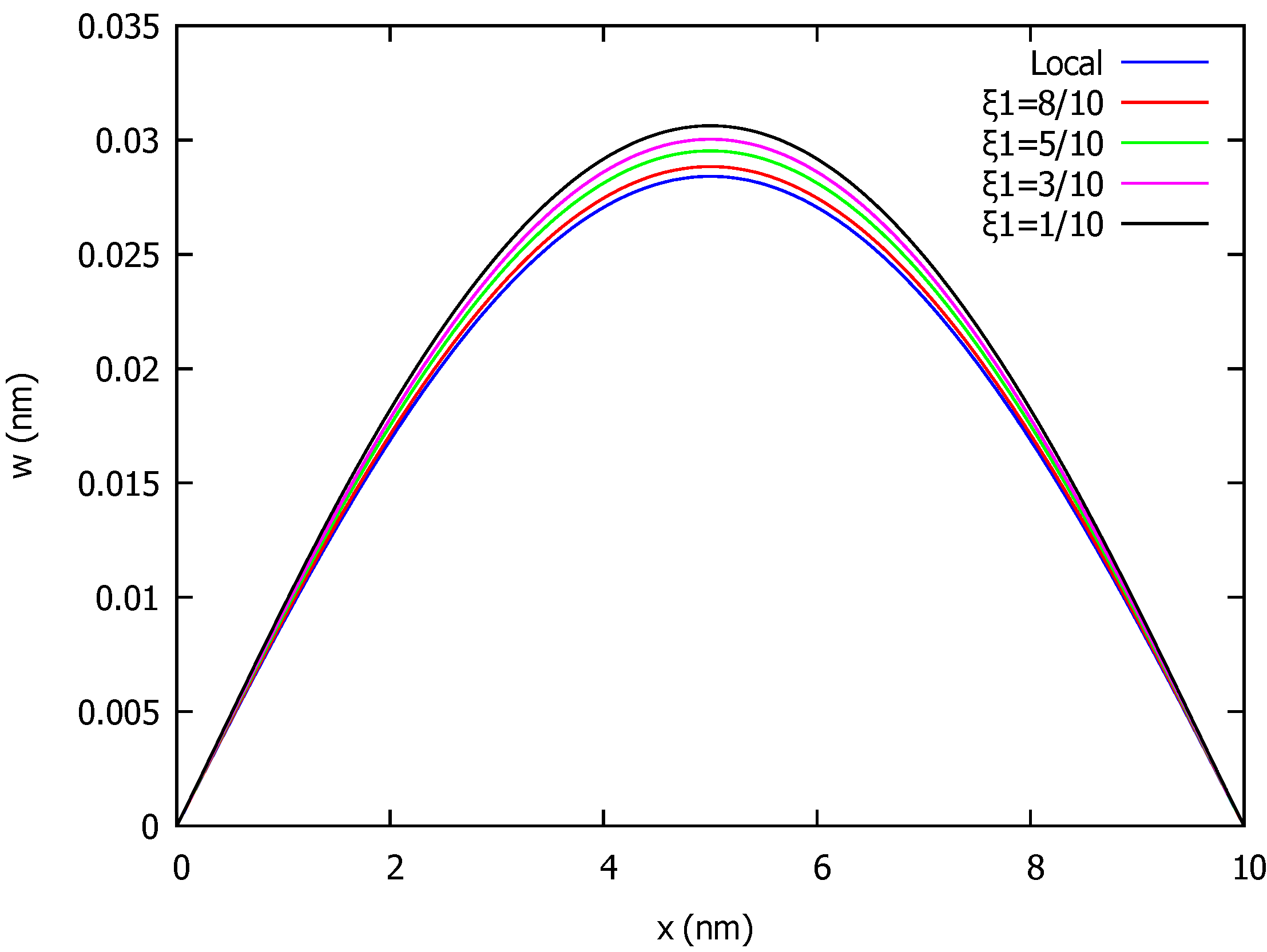
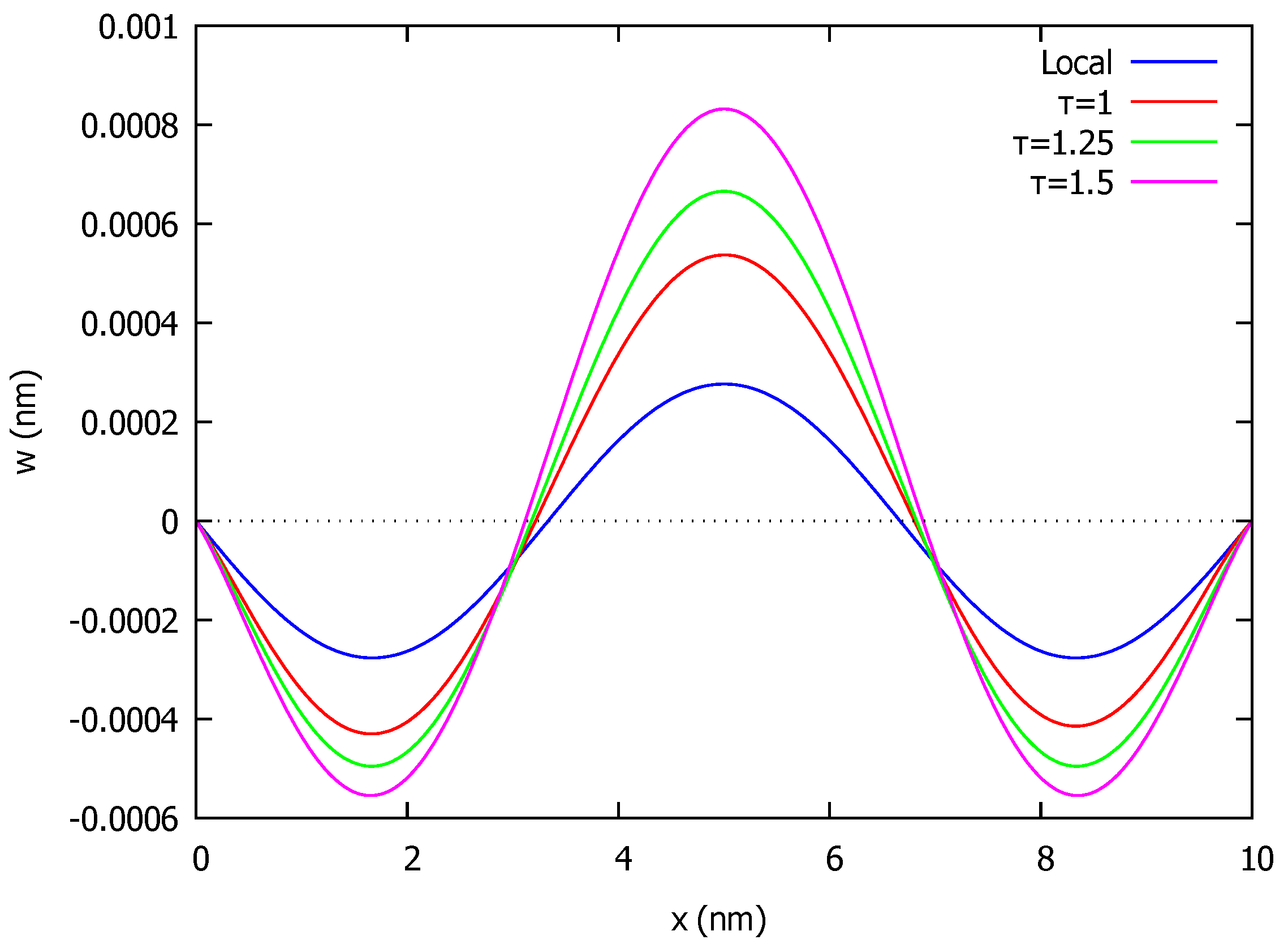
5. Examples and Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fleck, N.A.; Muller, G.M.; Ashby, M.F.; Hutchinson, J.W. Strain gradient plasticity: Theory and experiment. Acta Metall. Mater. 1994, 42, 475–487. [Google Scholar] [CrossRef]
- Lam, D.C.C.; Yang, F.; Chong, A.C.M.; Wang, J.; Tong, P. Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 2003, 51, 1477–1508. [Google Scholar] [CrossRef]
- Cosserat, E. Théorie des Corps Déformables; Librairie Scientifique A. Hermann et Fils: Paris, France, 1909. [Google Scholar]
- Mindlin, R.D. Influence of couple stresses on stress concentrations. Exp. Mech. 1963, 3, 1–7. [Google Scholar] [CrossRef]
- Eringen, A.C. Linear theory of micropolar elasticity. J. Math. Mech. 1966, 15, 909–923. [Google Scholar]
- Mindlin, R.D.; Eshel, N.N. On first strain-gradient theories in linear elasticity. Int. J. Solids Struct. 1968, 4, 109–124. [Google Scholar] [CrossRef]
- Aifantis, E. Update on a class of gradient theories. Mech. Mater. 2003, 35, 259–280. [Google Scholar] [CrossRef]
- Providas, E.; Kattis, M.A. Finite element method in plane Cosserat elasticity. Comput. Struct. 2002, 80, 2059–2069. [Google Scholar] [CrossRef]
- Lee, J.D.; Li, J. Advanced Continuum Theories and Finite Element Analyses; World Scientific: Singapore, 2020; p. 524. [Google Scholar] [CrossRef]
- Tuna, M.; Leonetti, L.; Trovalusci, P.; Kirca, M. ‘Explicit’ and ‘Implicit’ Non-local Continuum Descriptions: Plate with Circular Hole. In Size-Dependent Continuum Mechanics Approaches; Ghavanloo, E., Fazelzadeh, S.A., Marotti de Sciarra, F., Eds.; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Deng, G.; Dargush, G.F. Mixed variational principle and finite element formulation for couple stress elastostatics. Int. J. Mech. Sci. 2021, 202–203, 106497. [Google Scholar] [CrossRef]
- Eringen, A.C. On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 1983, 54, 4703. [Google Scholar] [CrossRef]
- Eringen, A.C. Theory of nonlocal elasticity and some applications. Re. Mech. 1987, 21, 313–342. [Google Scholar]
- Altan, S.B. Uniqueness of initial-boundary value problems in nonlocal elasticity. Int. J. Solids Struct. 1989, 25, 1271–1278. [Google Scholar] [CrossRef]
- Polizzotto, C. Nonlocal elasticity and related variational principles. Int. J. Solids Struct. 2001, 38, 7359–7380. [Google Scholar] [CrossRef]
- Arash, B.; Wang, Q. A review on the application of nonlocal elastic models in modeling of carbon nanotubes and graphenes. Comput. Mater. Sci. 2012, 51, 303–313. [Google Scholar] [CrossRef]
- Eltaher, M.A.; Khater, M.E.; Emam, S.A. A review on nonlocal elastic models for bending, buckling, vibrations, and wave propagation of nanoscale beams. Appl. Math. Model. 2016, 40, 4109–4128. [Google Scholar] [CrossRef]
- Eptaimeros, K.G.; Koutsoumaris, C.C.; Tsamasphyros, G.J. Nonlocal integral approach to the dynamical response of nanobeams. Int. J. Mech. Sci. 2016, 115–116, 68–80. [Google Scholar] [CrossRef]
- Peddieson, J.; Buchanan, G.R.; McNitt, R.P. Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 2003, 41, 305–312. [Google Scholar] [CrossRef]
- Wang, Q.; Liew, K.M. Application of nonlocal continuum mechanics to static analysis of micro- and nano-structures. Phys. Lett. A 2007, 363, 236–242. [Google Scholar] [CrossRef]
- Reddy, J.N. Nonlocal theories for bending, buckling and vibration of beams. Int. J. Eng. Sci. 2007, 45, 288–307. [Google Scholar] [CrossRef]
- Wang, C.M.; Kitipornchai, S.; Lim, C.W.; Eisenberger, M. Beam bending solutions based on nonlocal Timoshenko beam theory. J. Eng. Mech. 2008, 134, 475–481. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Kim, N.I.; Lee, J. Mixed finite element analysis of nonlocal Euler-Bernoulli nanobeams. Finite Elem. Anal. Des. 2015, 106, 65–72. [Google Scholar] [CrossRef]
- Challamel, N.; Wang, C.M. The small length scale effect for a non-local cantilever beam: A paradox solved. Nanotechnology 2008, 19, 345703. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Sáez, J.; Zaera, R.; Loya, J.A.; Reddy, J.N. Bending of Euler–Bernoulli beams using Eringen’s integral formulation: A paradox resolved. Int. J. Eng. Sci. 2016, 99, 107–116. [Google Scholar] [CrossRef] [Green Version]
- Polyanin, A.D.; Manzhirov, A.V. Handbook of Integral Equations, 2nd ed.; Chapman and Hall/CRC: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Tuna, M.; Kirca, M. Exact solution of Eringen’s nonlocal integral model for bending of Euler-Bernoulli and Timoshenko beams. Int. J. Eng. Sci. 2016, 105, 80–92. [Google Scholar] [CrossRef]
- Wang, Y.B.; Zhu, X.W.; Dai, H.H. Exact solutions for the static bending of Euler-Bernoulli beams using Eringen’s two-phase local/nonlocal model. AIP Adv. 2016, 6, 085114. [Google Scholar] [CrossRef] [Green Version]
- Khodabakhshi, P.; Reddy, J.N. A unified integro-differential nonlocal model. Int. J. Eng. Sci. 2015, 95, 60–75. [Google Scholar] [CrossRef] [Green Version]
- Adomian, G.; Rach, R. On linear and nonlinear integro-differential equations. J. Math. Anal. Appl. 1986, 113, 199–201. [Google Scholar] [CrossRef] [Green Version]
- Brunner, H. The numerical treatment of ordinary and partial Volterra integro-differential equations. In Proceedings of the First International Colloquium on Numerical Analysis, Plovdiv, Bulgaria, 13–17 August 1992; De Gruyter: Berlin, Germany, 1993; pp. 13–26. [Google Scholar] [CrossRef]
- Wazwaz, A.M. A reliable algorithm for solving boundary value problems for higher-order integro-differential equations. Appl. Math. Comput. 2001, 118, 327–342. [Google Scholar] [CrossRef]
- Bahuguna, D.; Ujlayan, A.; Pandey, D.N. A comparative study of numerical methods for solving an integro-differential equation. Comput. Math. Appl. 2009, 57, 1485–1493. [Google Scholar] [CrossRef] [Green Version]
- Noeiaghdam, S. Numerical solution of nth-order Fredholm integro-differential equations by integral mean value theorem method. Int. J. Pure Appl. Math. 2015, 99, 277–287. [Google Scholar] [CrossRef] [Green Version]
- Providas, E. Approximate solution of Fredholm integral and integro-differential equations with non-separable kernels. In Approximation and Computation in Science and Engineering, Springer Optimization and Its Applications 180; Daras, N.J., Rassias, T.M., Eds.; Springer: Cham, Switzerland, 2021; pp. 697–712. [Google Scholar] [CrossRef]
- Căruntu, B.; Paşca, M.S. Approximate Solutions for a Class of Nonlinear Fredholm and Volterra Integro-Differential Equations Using the Polynomial Least Squares Method. Mathematics 2021, 9, 2692. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Volterra-Fredholm Integro-Differential Equations. In Linear and Nonlinear Integral Equations; Springer: Berlin/Heidelberg, Germany, 2011; pp. 285–309. [Google Scholar] [CrossRef]
- Reutskiy, S.Y. The backward substitution method for multipoint problems with linear Volterra–Fredholm integro-differential equations of the neutral type. J. Comput. Appl. Math. 2016, 296, 724–738. [Google Scholar] [CrossRef]
- Rohaninasab, N.; Maleknejad, K.; Ezzati, R. Numerical solution of high-order Volterra–Fredholm integro-differential equations by using Legendre collocation method. Appl. Math. Comput. 2018, 328, 171–188. [Google Scholar] [CrossRef]
- Turkyilmazoglu, M. High-order nonlinear Volterra–Fredholm-Hammerstein integro-differential equations and their effective computation. Appl. Math. Comput. 2014, 247, 410–416. [Google Scholar] [CrossRef]
- Dehestani, H.; Ordokhani, Y.; Razzaghi, M. Combination of Lucas wavelets with Legendre-Gauss quadrature for fractional Fredholm-Volterra integro-differential equations. J. Comput. Appl. Math. 2021, 382, 113070. [Google Scholar] [CrossRef]
- Berenguer, M.I.; Gámez, D.; López Linares, A.J. Fixed point techniques and Schauder bases to approximate the solution of the first order nonlinear mixed Fredholm-Volterra integro-differential equation. J. Comput. Appl. Math. 2013, 252, 52–61. [Google Scholar] [CrossRef]
- Parasidis, I.N.; Providas, E. Extension Operator Method for the Exact Solution of Integro-Differential Equations. In Contributions in Mathematics and Engineering: In Honor of Constantin Carathéodory; Pardalos, P.M., Rassias, T.M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 473–496. [Google Scholar] [CrossRef]
- Parasidis, I.N.; Providas, E. On the Exact Solution of Nonlinear Integro-Differential Equations. In Applications of Nonlinear Analysis. Springer Optimization and Its Applications; Rassias, T., Ed.; Springer: Cham, Switzerland, 2018; Volume 134, pp. 591–609. [Google Scholar] [CrossRef]
- Baiburin, M.M.; Providas, E. Exact Solution to Systems of Linear First-Order Integro-Differential Equations with Multipoint and Integral Conditions. In Mathematical Analysis and Applications; Springer Optimization and Its Applications; Rassias, T.M., Pardalos, P.M., Eds.; Springer: Cham, Switzerland, 2019; Volume 154, pp. 1–16. [Google Scholar] [CrossRef]
- Zwillinger, D. Handbook of Differential Equations, 3rd ed.; Academic Press: San Diego, CA, USA, 1998. [Google Scholar]
- Providas, E. Closed-Form Solution of the Bending Two-Phase Integral Model of Euler-Bernoulli Nanobeams. Algorithms 2022, 15, 151. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| L (nm) | b (nm) | h (nm) | (nN/nm) | E (TPa) | (nm) | |
|---|---|---|---|---|---|---|
| 10 | 1 | 1 | 5.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Providas, E. On the Exact Solution of Nonlocal Euler–Bernoulli Beam Equations via a Direct Approach for Volterra-Fredholm Integro-Differential Equations. AppliedMath 2022, 2, 269-283. https://doi.org/10.3390/appliedmath2020017
Providas E. On the Exact Solution of Nonlocal Euler–Bernoulli Beam Equations via a Direct Approach for Volterra-Fredholm Integro-Differential Equations. AppliedMath. 2022; 2(2):269-283. https://doi.org/10.3390/appliedmath2020017
Chicago/Turabian StyleProvidas, Efthimios. 2022. "On the Exact Solution of Nonlocal Euler–Bernoulli Beam Equations via a Direct Approach for Volterra-Fredholm Integro-Differential Equations" AppliedMath 2, no. 2: 269-283. https://doi.org/10.3390/appliedmath2020017
APA StyleProvidas, E. (2022). On the Exact Solution of Nonlocal Euler–Bernoulli Beam Equations via a Direct Approach for Volterra-Fredholm Integro-Differential Equations. AppliedMath, 2(2), 269-283. https://doi.org/10.3390/appliedmath2020017