
Advancing Biomechanical Simulations: A Novel Pseudo-Rigid-Body Model for Flexible Beam Analysis


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Introducing Biomechanical Simulations
1.2. Passive Exoskeletons in Biomechanical Simulations
1.3. Advances in the Simulation of Flexible Beams in Biomechanical Applications
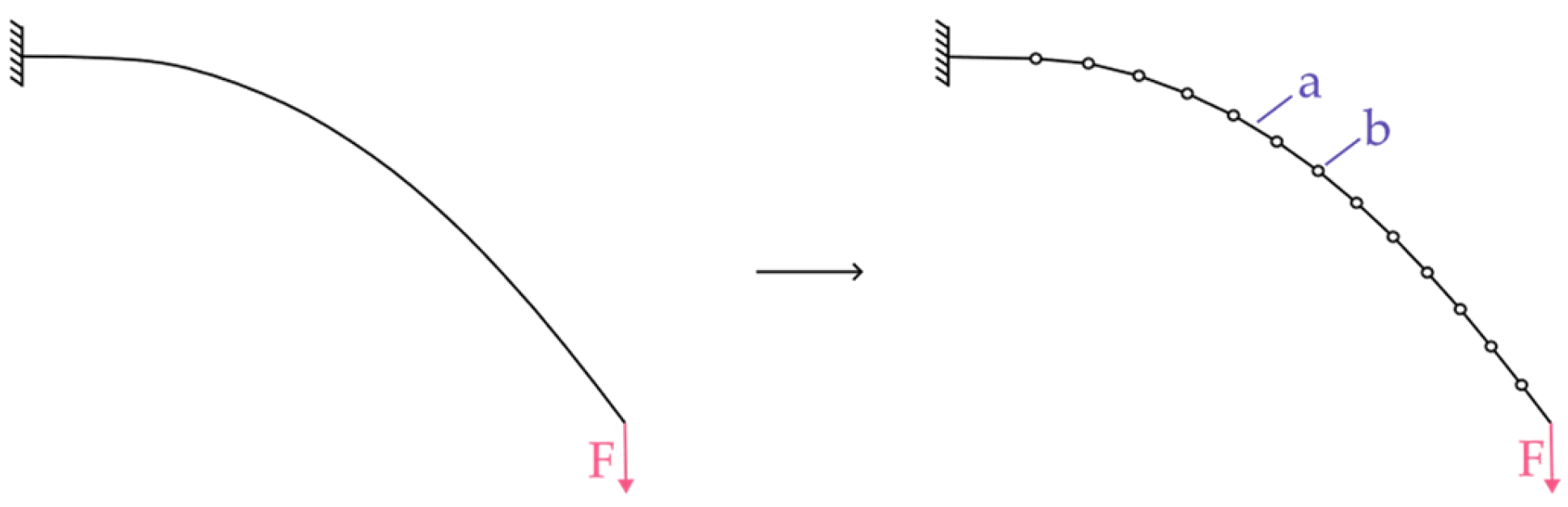
1.4. The Pseudo-Rigid-Body Model Approach
1.5. Methodological Framework and Purpose
2. Materials and Methods
2.1. Measurement of the Stiffness Coefficient
2.2. Implemention of the PRBM in the AnyBody Modeling Software
2.3. Validation of the PRBM Method
2.3.1. Validation of the Stiffness Coefficient
2.3.2. Validation of the Constraint Force
2.4. Implementation of a Passive Exoskeleton
3. Results
3.1. PRBM Validation
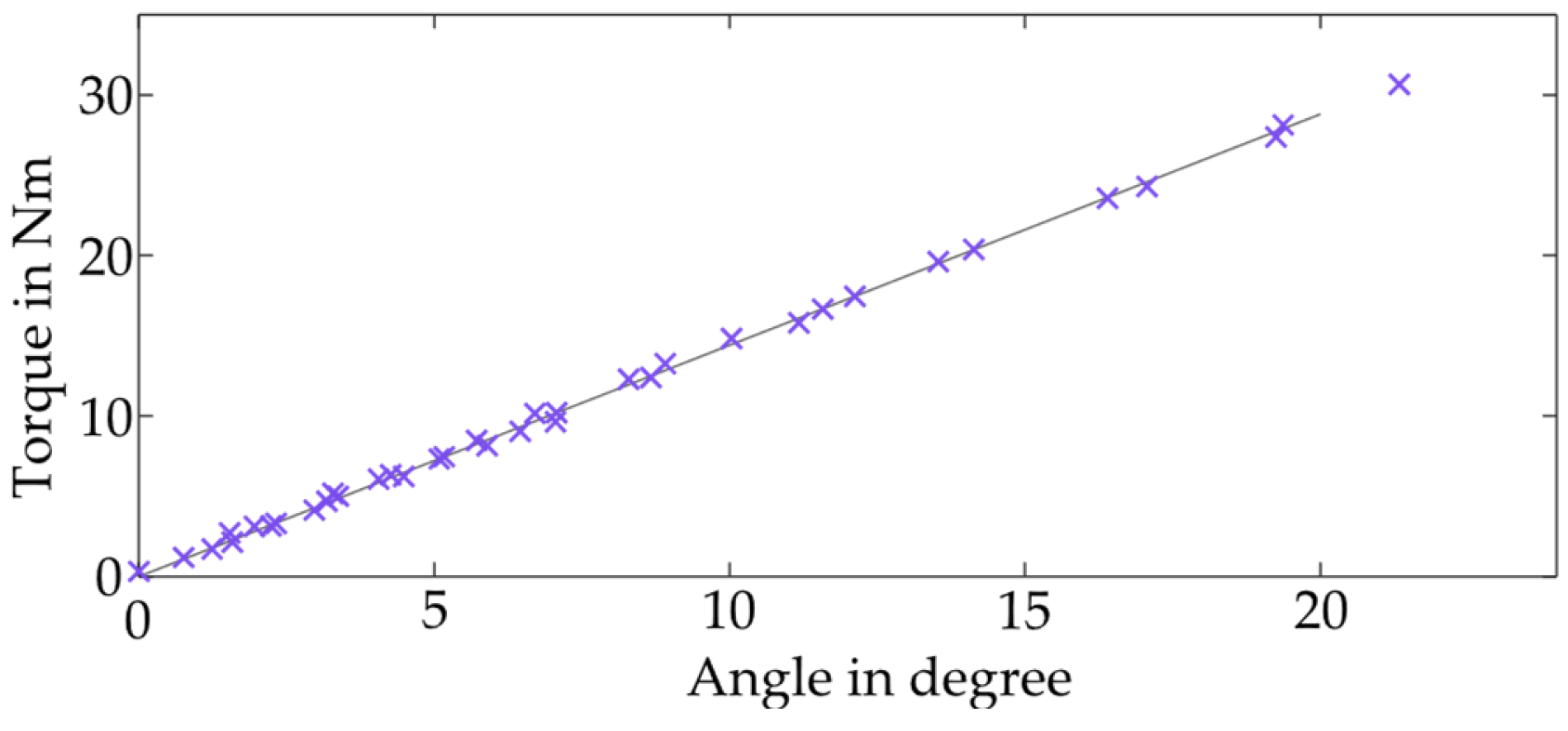
3.1.1. Stiffness Coefficient
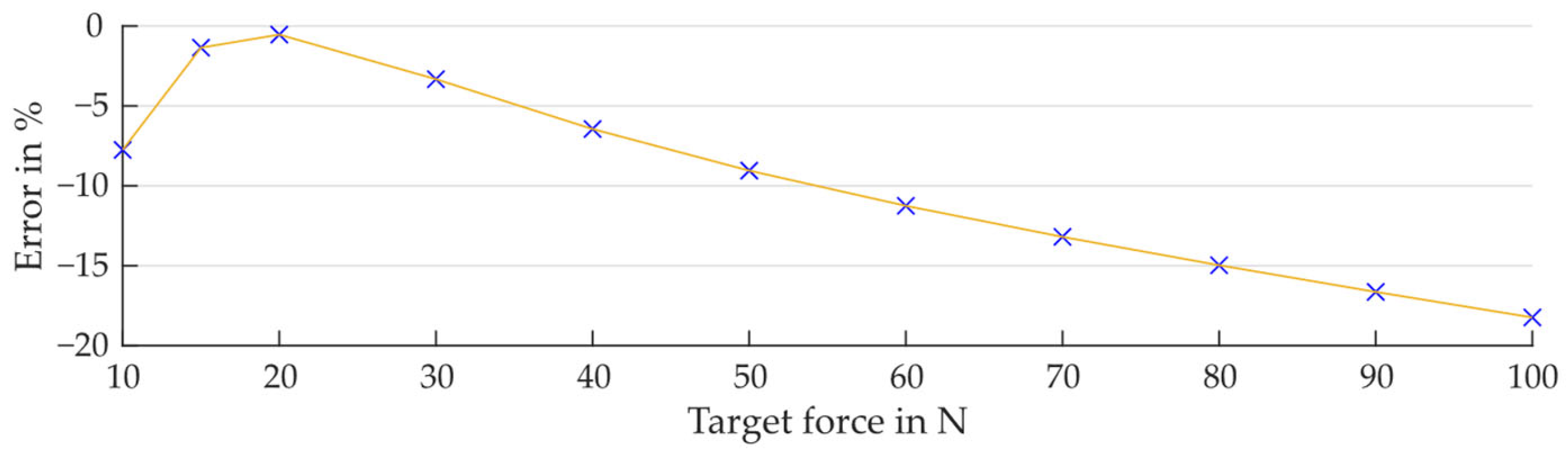
3.1.2. Constraint Force Controller
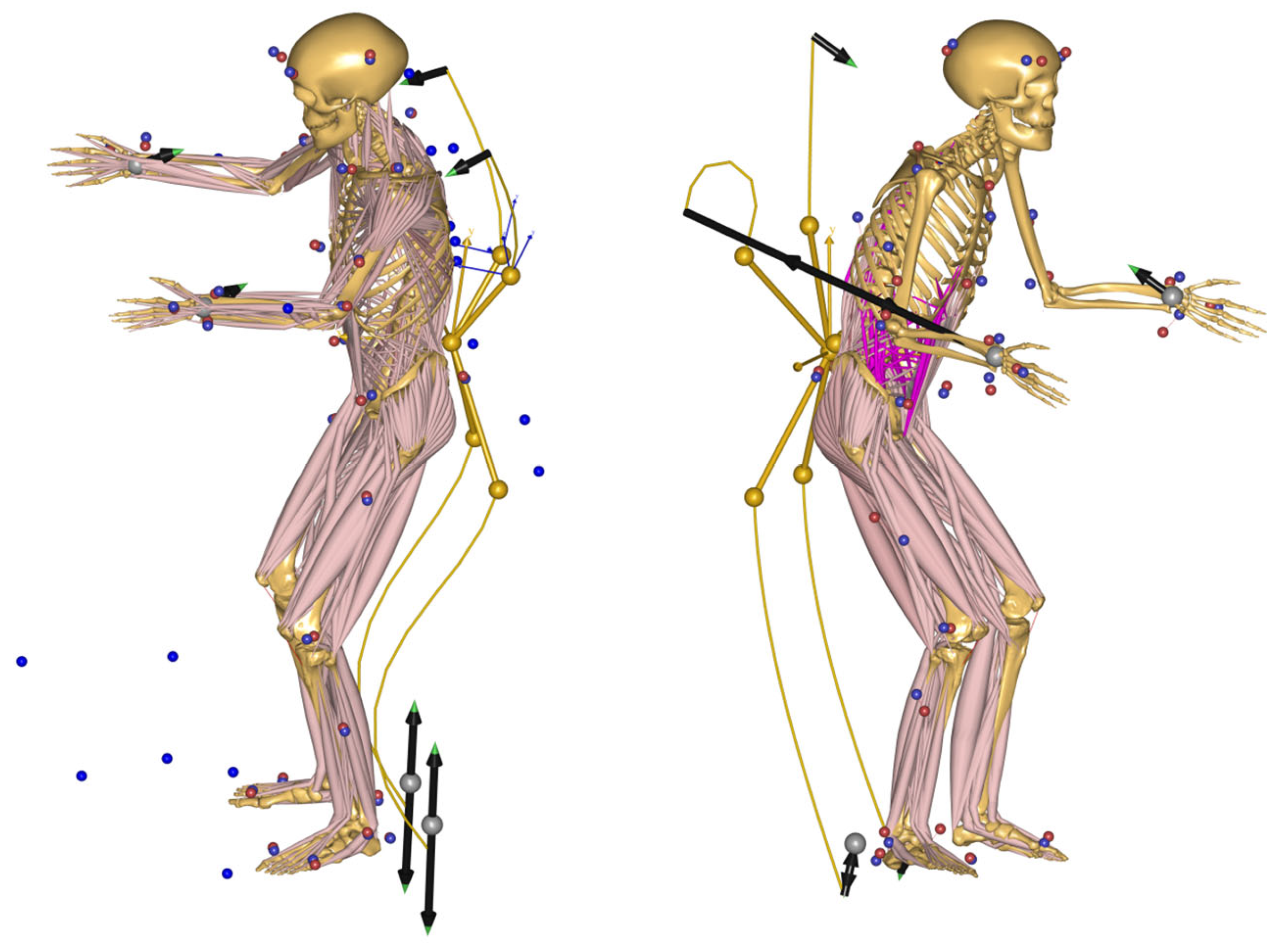
3.2. Simulation of a Passive Exoskeleton
4. Discussion
4.1. Constraint Force Control Error
4.2. Stiffness Coefficient
4.3. Rigid Segment Length
4.4. Exoskeleton Simulation
4.5. Kinematic Unstable Positions
4.6. Further Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
| Constraint force in x and y direction in N | |
| Gain Factor in N/m | |
| Ramp Factor, dimensionless | |
| Control error in x and y direction in m |
| Current iteration step | |
| Length of the ramp in iteration steps |
Appendix C


Appendix D
References
- Uhlrich, S.D.; Uchida, T.K.; Lee, M.R.; Delp, S.L. Ten steps to becoming a musculoskeletal simulation expert: A half-century of progress and outlook for the future. J. Biomech. 2023, 154, 111623. [Google Scholar] [CrossRef] [PubMed]
- Ni, Y.; Gao, Y.; Yao, J. Introduction to Musculoskeletal System. In Biomechanical Modelling and Simulation on Musculoskeletal System; Fan, Y., Wang, L., Eds.; Springer: Singapore, 2021; pp. 1–34. [Google Scholar] [CrossRef]
- Molz, C.; Yao, Z.; Sänger, J.; Gwosch, T.; Weidner, R.; Matthiesen, S.; Wartzack, S.; Miehling, J. A Musculoskeletal Human Model-Based Approach for Evaluating Support Concepts of Exoskeletons for Selected Use Cases. Proc. Des. Soc. 2022, 2, 515–524. [Google Scholar] [CrossRef]
- Aftabi, H.; Nasiri, R.; Ahmadabadi, M.N. Simulation-based biomechanical assessment of unpowered exoskeletons for running. Sci. Rep. 2021, 11, 11846. [Google Scholar] [CrossRef] [PubMed]
- Fritzsche, L.; Galibarov, P.E.; Gärtner, C.; Bornmann, J.; Damsgaard, M.; Wall, R.; Schirrmeister, B.; Gonzalez-Vargas, J.; Pucci, D.; Maurice, P.; et al. Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System. Wearable Technol. 2021, 2, e6. [Google Scholar] [CrossRef] [PubMed]
- Khan, J.S.; Mohammadi, M.; Rasmussen, J.; Andreasen Struijk, L.N.S. Simulation-based design optimization of a wrist exoskeleton. In Proceedings of the 2023 45th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Sydney, Australia, 24–27 July 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Madinei, S.; Nussbaum, M. Estimating lumbar spine loading when using back-support exoskeletons in lifting tasks. J. Biomech. 2023, 147, 111439. [Google Scholar] [CrossRef] [PubMed]
- Tröster, M.; Wagner, D.; Müller-Graf, F.; Maufroy, C.; Schneider, U.; Bauernhansl, T. Biomechanical Model-Based Development of an Active Occupational Upper-Limb Exoskeleton to Support Healthcare Workers in the Surgery Waiting Room. Int. J. Environ. Res. Public Health 2020, 17, 14. [Google Scholar] [CrossRef] [PubMed]
- Auer, S.; Tröster, M.; Schiebl, J.; Iversen, K.; Chander, D.S.; Damsgaard, M.; Dendorfer, S. Biomechanical assessment of the design and efficiency of occupational exoskeletons with the AnyBody Modeling System. Z. Für Arbeitswissenschaft 2022, 76, 440–449. [Google Scholar] [CrossRef]
- Musso, M.; Oliveira, A.S.; Bai, S. Modeling of a Non-Rigid Passive Exoskeleton-Mathematical Description and Musculoskeletal Simulations. Robotics 2022, 11, 147. [Google Scholar] [CrossRef]
- Hao, G.; Yu, J.; Li, H. A brief review on nonlinear modeling methods and applications of compliant mechanisms. Front. Mech. Eng. 2016, 11, 119–128. [Google Scholar] [CrossRef]
- Saggere, L.; Kota, S. Synthesis of Planar, Compliant Four-Bar Mechanisms for Compliant-Segment Motion Generation. J. Mech. Des. 2001, 123, 535–541. [Google Scholar] [CrossRef]
- Li, N.; Liu, C.; Jiang, H. Dynamics modeling for curved-type fully compliant mechanism based on pseudo-rigid-body modeling. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2302–2307. [Google Scholar] [CrossRef]
- Xu, H.; Gan, J.; Zhang, X. A generalized pseudo-rigid-body PPRR model for both straight and circular beams in compliant mechanisms. Mech. Mach. Theory 2020, 154, 104054. [Google Scholar] [CrossRef]
- Chang, P.; Padır, T. Model-Based Manipulation of Linear Flexible Objects: Task Automation in Simulation and Real World. Machines 2020, 8, 46. [Google Scholar] [CrossRef]
- Timošenko, S.P. History of Strength of Materials: With a Brief Account of the History of Theory of Elasticity and Theory of Structures; Courier Corporation: North Chelmsford, MA, USA, 1983. [Google Scholar]
- Howell, L.L.; Midha, A.; Norton, T.W. Evaluation of Equivalent Spring Stiffness for Use in a Pseudo-Rigid-Body Model of Large-Deflection Compliant Mechanisms. J. Mech. Des. 1996, 118, 126–131. [Google Scholar] [CrossRef]
- Andersen, M.S. Introduction to Musculoskeletal Modelling; Woodhead Publishing Series in Biomaterials; Woodhead Publishing: Cambridge, UK, 2021; pp. 41–80. [Google Scholar] [CrossRef]
- Andersen, M.S.; de Zee, M.; Damsgaard, M.; Nolte, D.; Rasmussen, J. Introduction to Force-Dependent Kinematics: Theory and Application to Mandible Modeling. J. Biomech. Eng. 2017, 139, 9. [Google Scholar] [CrossRef]
- Reuter, M.; Zacher, S. Regelungstechnik für Ingenieure: Analyse, Simulation und Entwurf von Regelkreisen; Vieweg+Teubner Verlag: Wiesbaden, Germany, 2008. [Google Scholar] [CrossRef]
- Scherb, D.; Wartzack, S.; Miehling, J. Modelling the interaction between wearable assistive devices and digital human models—A systematic review. Front. Bioeng. Biotechnol. 2022, 10, 1044275. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hahnemann, Y.; Weiss, M.; Bernek, M.; Boblan, I.; Götz, S. Advancing Biomechanical Simulations: A Novel Pseudo-Rigid-Body Model for Flexible Beam Analysis. Biomechanics 2024, 4, 566-584. https://doi.org/10.3390/biomechanics4030040
Hahnemann Y, Weiss M, Bernek M, Boblan I, Götz S. Advancing Biomechanical Simulations: A Novel Pseudo-Rigid-Body Model for Flexible Beam Analysis. Biomechanics. 2024; 4(3):566-584. https://doi.org/10.3390/biomechanics4030040
Chicago/Turabian StyleHahnemann, Yannis, Manuel Weiss, Markus Bernek, Ivo Boblan, and Sebastian Götz. 2024. "Advancing Biomechanical Simulations: A Novel Pseudo-Rigid-Body Model for Flexible Beam Analysis" Biomechanics 4, no. 3: 566-584. https://doi.org/10.3390/biomechanics4030040
APA StyleHahnemann, Y., Weiss, M., Bernek, M., Boblan, I., & Götz, S. (2024). Advancing Biomechanical Simulations: A Novel Pseudo-Rigid-Body Model for Flexible Beam Analysis. Biomechanics, 4(3), 566-584. https://doi.org/10.3390/biomechanics4030040