
Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
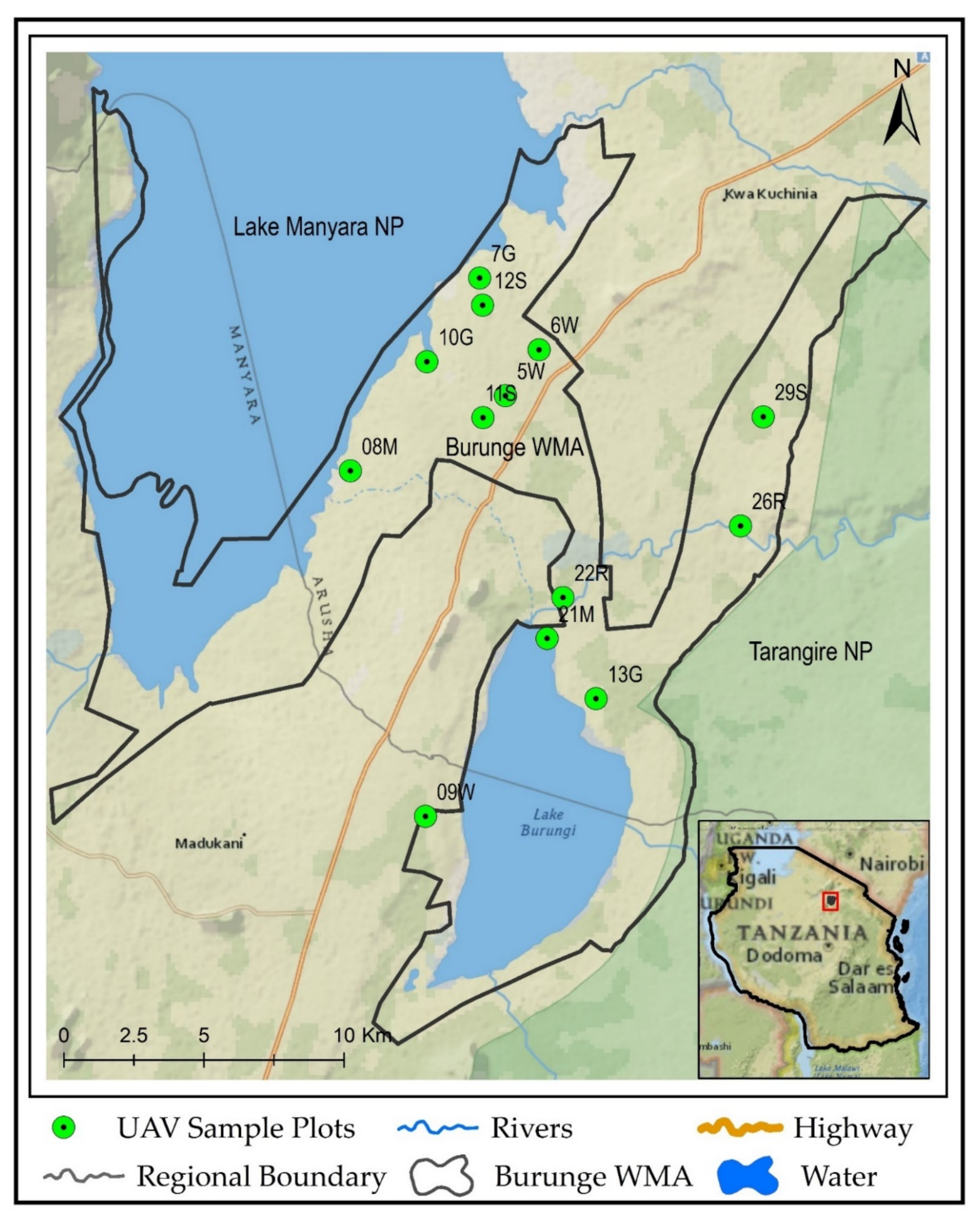
2.1. Study Area
2.2. Data Collection
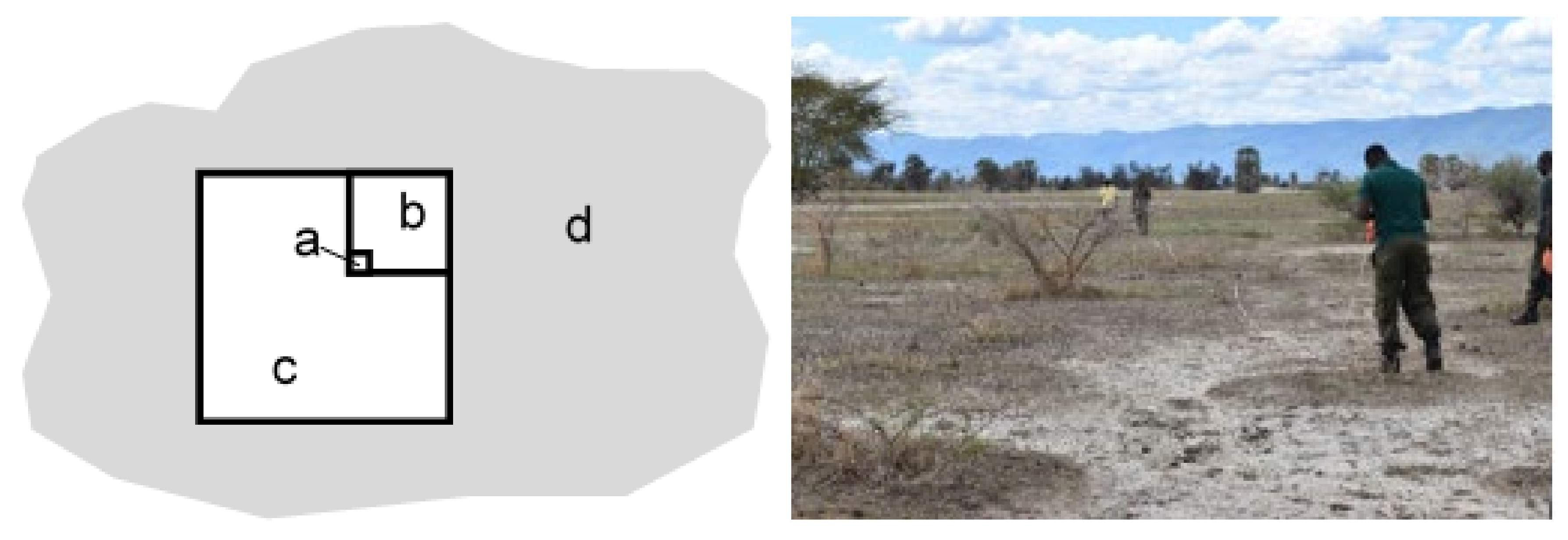
2.2.1. Sample Plots and Flight Mission Planning
2.2.2. Acquisition of Satellite Imagery
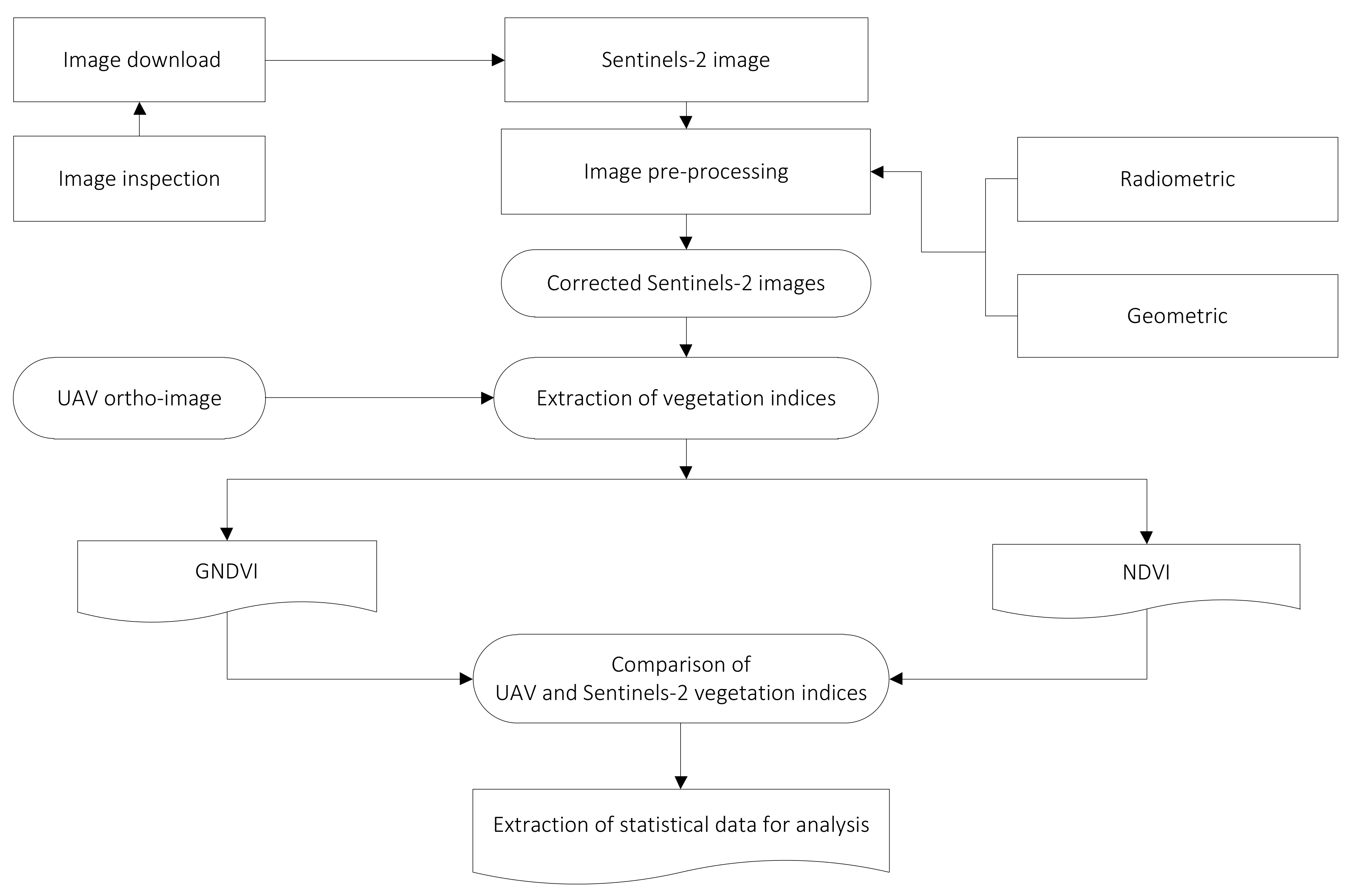
2.3. Data Processing
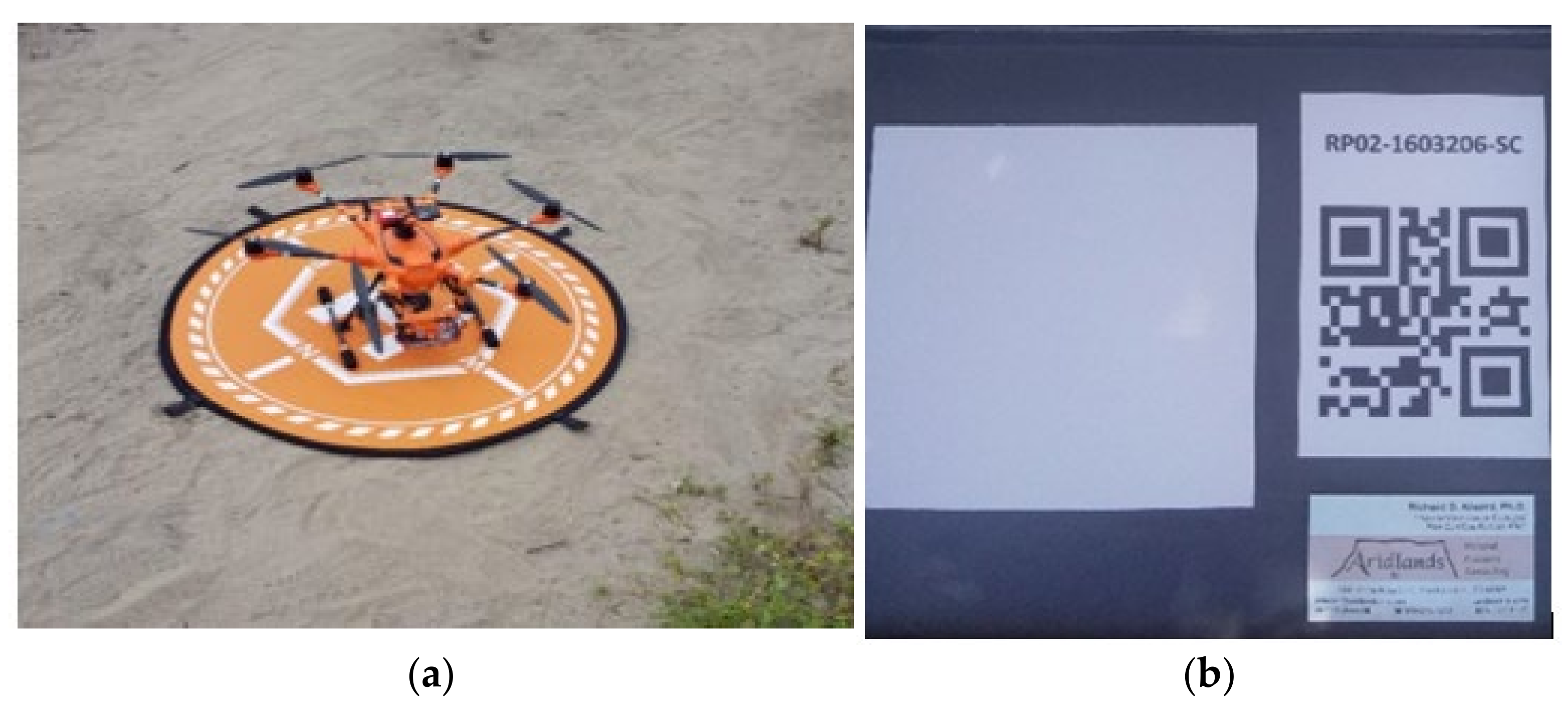
2.3.1. UAV-Based Image Acquisition in the Field
2.3.2. Extraction of NDVI and GNDVI Values from UAV-Based Orthoimages
2.3.3. Processing of Sentinel-2 Imagery and Extracting Vegetation Indices
2.3.4. Determination of NDVI and GNDVI Classes Using Scale Values
2.4. Data Analysis
3. Results
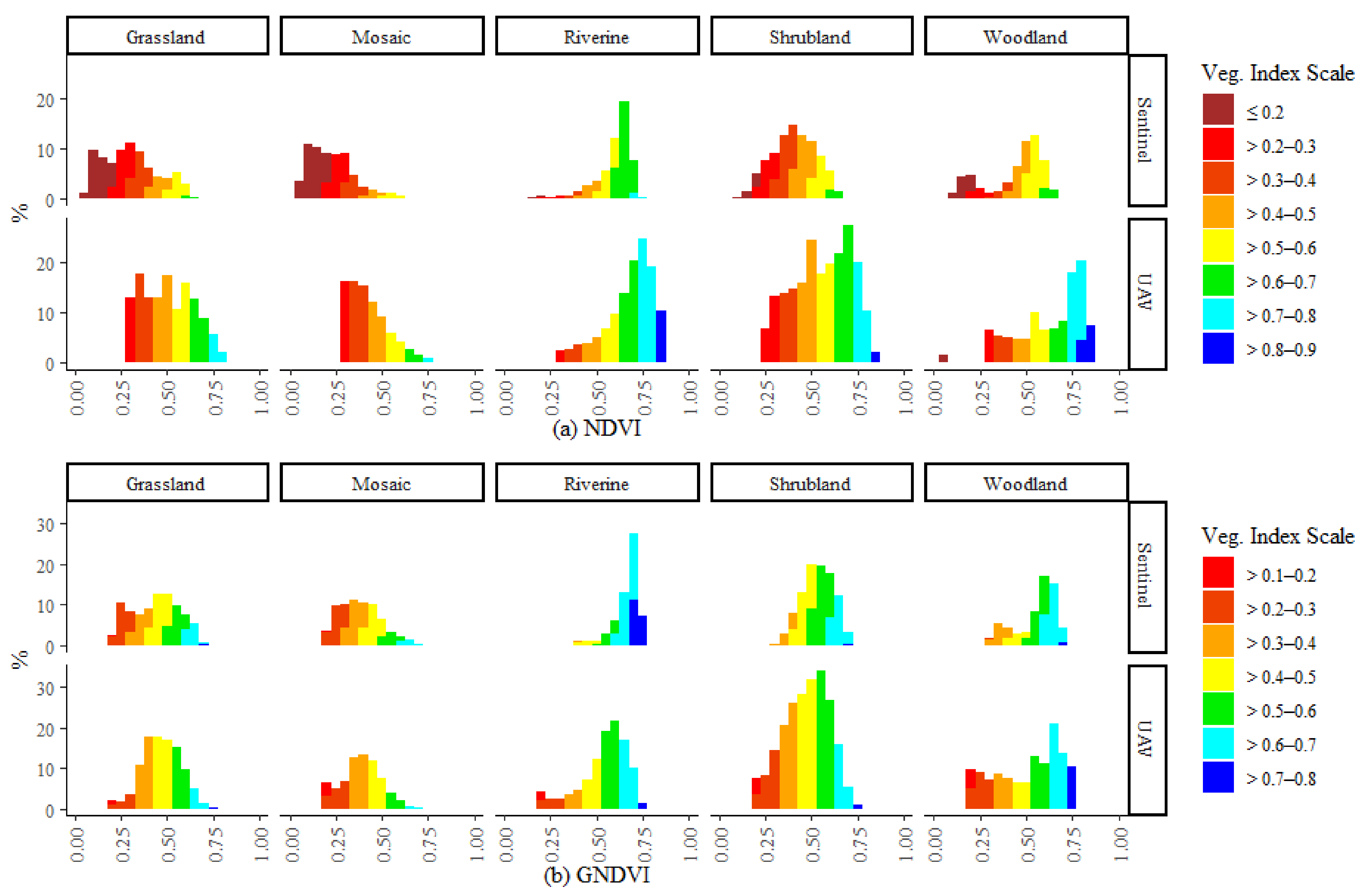
3.1. Comparative Results from UAV-and Sentinel-2 VI Histograms and Basic Statistics
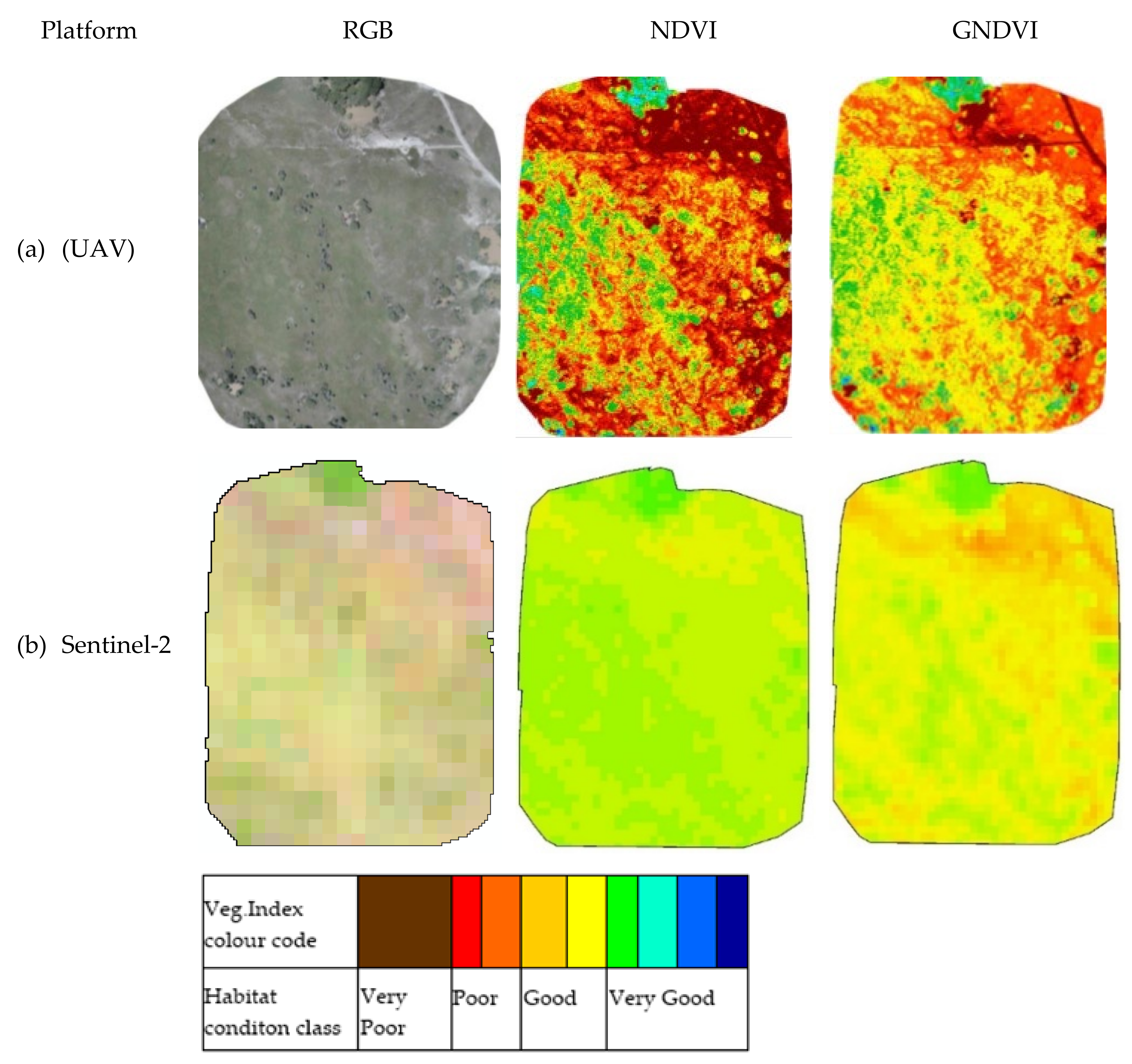
3.2. Vegetation Index Maps
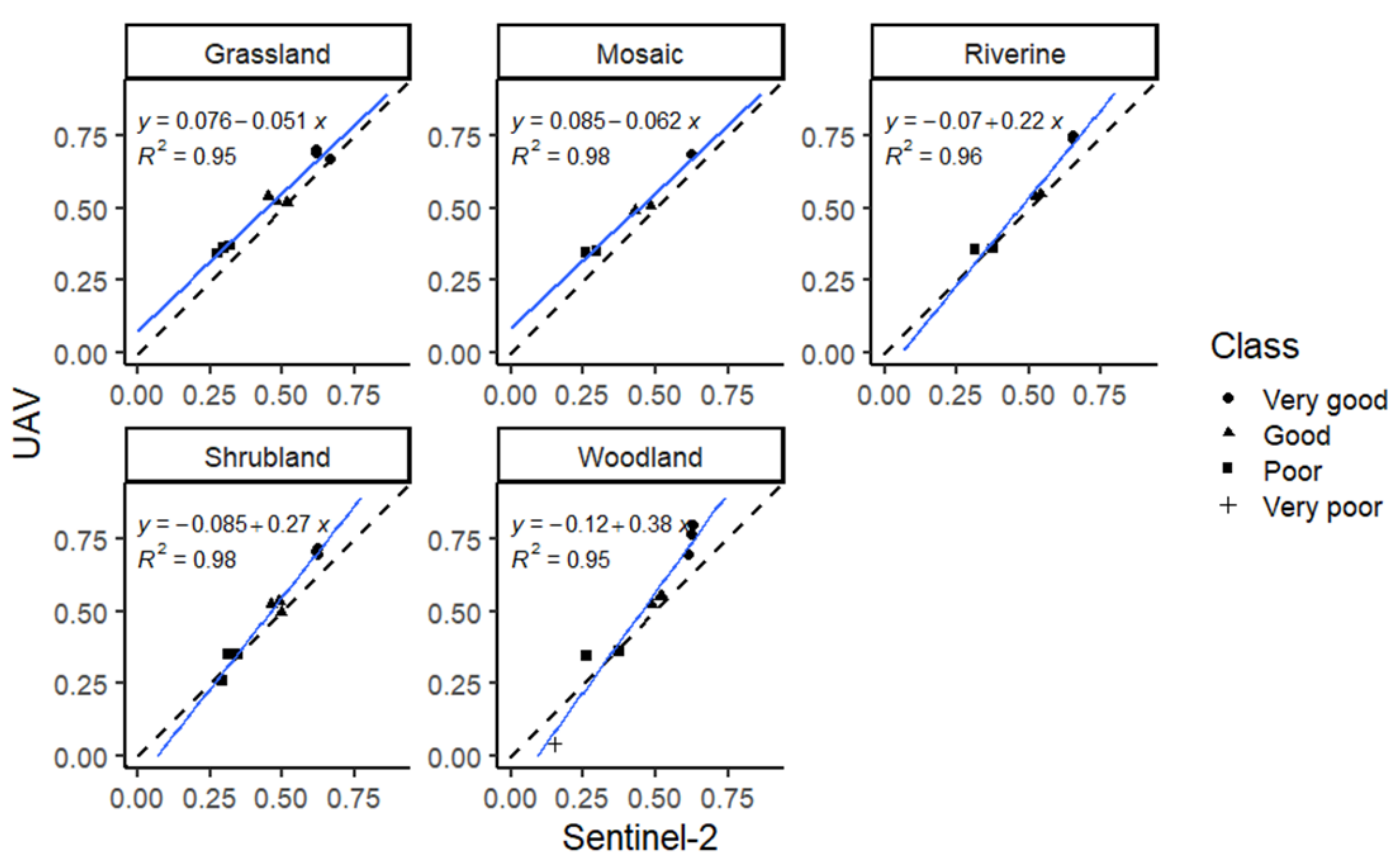
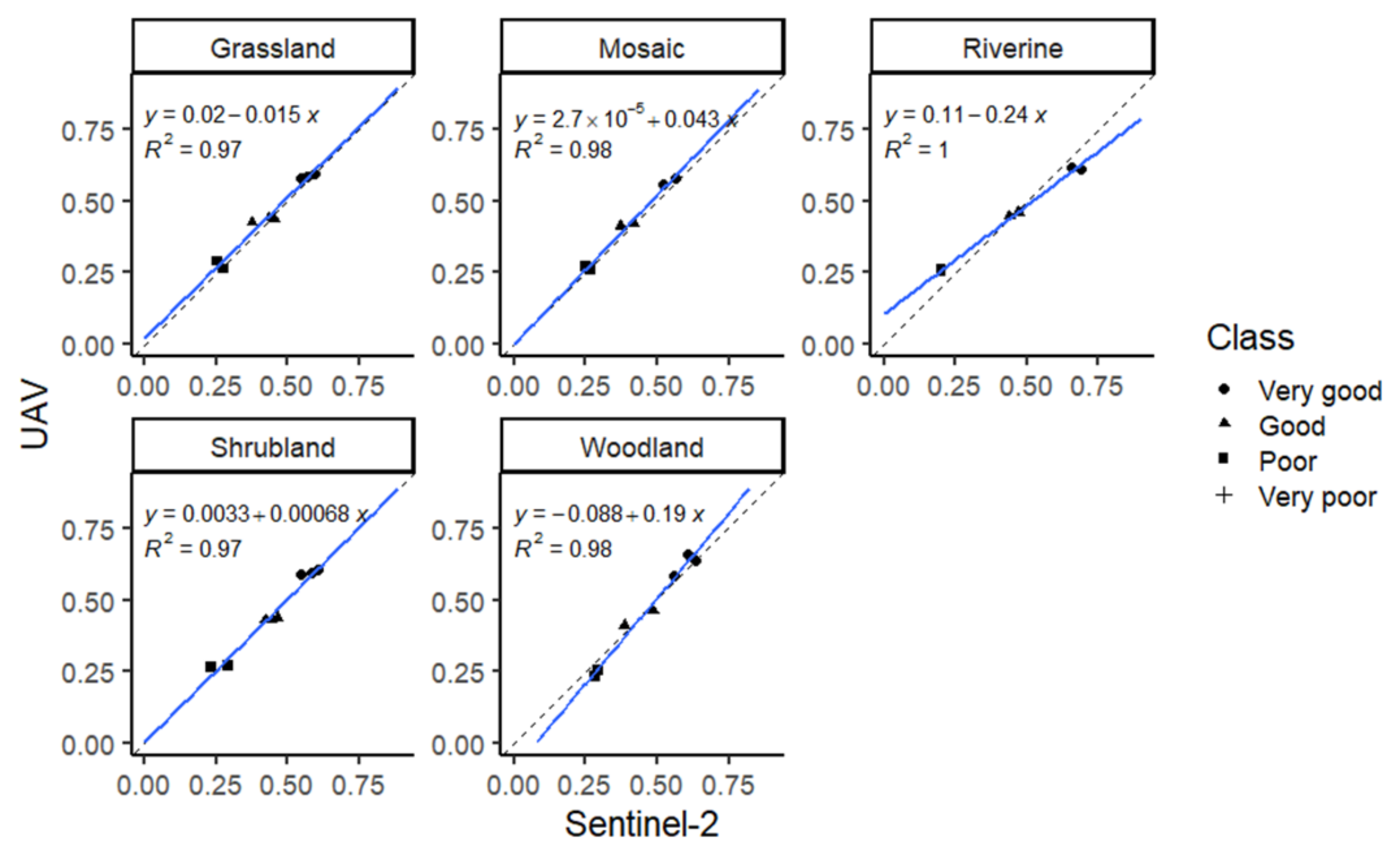
3.3. Linear Regression Models for UAV-and Sentinel-2 Vegetation Indices in Land Cover Types
4. Discussion
4.1. Comparison Based on Histograms and Basic Statistics of NDVI and GNDVI Values
4.2. Comparison Based on Vegetation Index Maps
4.3. Comparative Insights from Statistical Correlations and Linear Regressions of NDVI and GNDVI Mean Values Derived by UAV and Sentinel-2
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vegetation Index | Explanations | References |
|---|---|---|
| Enhanced Vegetation Index (EVI) | Counteracts atmospheric aerosol and saturation effects, and soil reflectance influence. Its values range between −1 and +1 within which healthy vegetation/forage falls between 0.20 and 0.80. It has a low dynamic range in low vegetated drylands; the C1 and C2 are not needed in UAV-based imagery | [29,31,41,42,43,70]. |
| Two Band EVI (EVI2) | It avoids signal-to-noise problems and does not need coefficients of aerosol resistance terms (C1 and C2) as those needed in the EVI; hence, it also fits UAV-based VIs computations. This index has a low dynamic range in low vegetated drylands. | [43]. |
| Red Edge NDVI (RENDVI) | As a positive modification of NDVI, it is sensitive to even small changes in vegetation health and enables estimation of available green forage. Its values range from −1 to 1; green vegetation is normally detected from 0.2 to 0.9 | [44,45] |
| Wide Dynamic Range Vegetation Index (WDRVI) | It utilizes the same spectral bands (red and NIR) as that of NDVI. It is at least three times more sensitive to moderate-to-high LAI than that of NDVI; hence, it is also effective in monitoring vegetation states under such moderate-to-high vegetation cover density. Further evaluations of the index had been suggested. | [46] |
| Atmospherically Resistant Vegetation Index (ARVI) | It’s a modification from NDVI; it minimizes atmospheric effects; informs on the state of vegetation, and its values range from −1 to 1 similar to NDVI, RENDVI, and EVI. It has been reported that all vegetation indices designed to reduce atmospheric effect tend to be highly sensitive to the soil reflectance effect; hence, it is not appropriate for arid regions where bare soils predominate. It also has a low dynamic range in low vegetated arid and semi-arid drylands. | [29,88]. |
References
- MacDonald, A.; Bartels, S.F.; Macdonald, S.E.; Pigeon, K.E.; MacNearney, D.; Finnegan, L. Wildlife forage cover and composition on pipeline corridors in Alberta: Implications for wildlife conservation. For. Ecol. Manag. 2020, 468, 118189. [Google Scholar] [CrossRef]
- Frair, J.L.; Merrill, E.H.; Visscher, D.R.; Fortin, D.; Beyer, H.L.; Morales, J.M. Scales of movement by elk (Cervus elaphus) in response to heterogeneity in forage resources and predation risk. Landsc. Ecol. 2005, 20, 273–287. [Google Scholar] [CrossRef]
- Espach, C.; Lubbe, L.; Ganzin, N. Determining grazing capacity in Namibia with the aid of remote sensing. Afr. J. Range Forage Sci. 2009, 26, 133–138. [Google Scholar] [CrossRef]
- Funghi, C.; Heim, R.H.; Schuett, W.; Griffith, S.C.; Oldeland, J. Estimating food resource availability in arid environments with Sentinel 2 satellite imagery. PeerJ 2020, 8, e9209. [Google Scholar] [CrossRef]
- Ryan, S.; Knechtel, C.; Getz, W. Ecological cues, gestation length, and birth timing in African buffalo (Syncerus caffer). Behav. Ecol. 2007, 18, 635–644. [Google Scholar] [CrossRef] [Green Version]
- Pettorelli, N.; Bro-Jørgensen, J.; Durant, S.M.; Blackburn, T.; Carbone, C. Energy availability and density estimates in African ungulates. Am. Nat. 2009, 173, 698–704. [Google Scholar] [CrossRef] [Green Version]
- Pettorelli, N.; Ryan, S.; Mueller, T.; Bunnefeld, N.; Jędrzejewska, B.; Lima, M.; Kausrud, K. The Normalized Difference Vegetation Index (NDVI): Unforeseen successes in animal ecology. Clim. Res. 2011, 46, 15–27. [Google Scholar] [CrossRef]
- Wilmshurst, J.F.; Fryxell, J.M.; Farm, B.P.; Sinclair, A.; Henschel, C.P. Spatial distribution of Serengeti wildebeest in relation to resources. Can. J. Zool. 1999, 77, 1223–1232. [Google Scholar] [CrossRef]
- Dussault, C.; Courtois, R.; Ouellet, J.-P.; Girard, I. Space use of moose in relation to food availability. Can. J. Zool. 2005, 83, 1431–1437. [Google Scholar] [CrossRef]
- Bukombe, J.; Kittle, A.; Senzota, R.B.; Kija, H.; Mduma, S.; Fryxell, J.M.; Magige, F.; Mligo, C.; Sinclair, A.R. The influence of food availability, quality and body size on patch selection of coexisting grazer ungulates in western Serengeti National Park. Wildl. Res. 2019, 46, 54–63. [Google Scholar] [CrossRef] [Green Version]
- Ranc, N.; Moorcroft, P.R.; Hansen, K.W.; Ossi, F.; Sforna, T.; Ferraro, E.; Brugnoli, A.; Cagnacci, F. Preference and familiarity mediate spatial responses of a large herbivore to experimental manipulation of resource availability. Sci. Rep. 2020, 10, 1–11. [Google Scholar] [CrossRef]
- Lopoukhine, N.; Crawhall, N.; Dudley, N.; Figgis, P.; Karibuhoye, C.; Laffoley, D.; Londoño, J.M.; MacKinnon, K.; Sandwith, T. Protected areas: Providing natural solutions to 21st Century challenges. SAPI EN. S. Surv. Perspect. Integr. Environ. Soc. 2012, 5, 116–131. [Google Scholar]
- Stocking, M.; Murnaghan, N. Land degradation: Guidelines for field assessment. Overseas Dev. Group Univ. East Angl. Norwich UK 2000, 120, 1–130. [Google Scholar]
- Yengoh, G.T.; Dent, D.; Olsson, L.; Tengberg, A.E.; Tucker III, C.J. Use of the Normalized Difference Vegetation Index (NDVI) to Assess Land Degradation at Multiple Scales: Current status, Future Trends, and Practical Considerations; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Selemani, I.S.; Sangeda, A.Z. Spatial and temporal vegetation dynamics: Opportunities and constraints behind wildlife migration in Eastern Africa Savanna Ecosystem. Wildl. Manag. Fail. Successes Prospect. 2019. [Google Scholar] [CrossRef] [Green Version]
- Kideghesho, J.R.; Nyahongo, J.W.; Hassan, S.N.; Tarimo, T.C.; Mbije, N.E. Factors and ecological impacts of wildlife habitat destruction in the Serengeti ecosystem in northern Tanzania. Afr. J. Environ. Assess. Manag. 2006, 11, 17–32. [Google Scholar]
- Wondie, M.; Schneider, W.; Melesse, A.M.; Teketay, D. Spatial and temporal land cover changes in the Simen Mountains National Park, a world heritage site in Northwestern Ethiopia. Remote Sens. 2011, 3, 752–766. [Google Scholar] [CrossRef] [Green Version]
- Di Gregorio, A. Land Cover Classification System: Classification Concepts and User Manual; LCCS, FAO: Rome, Italy, 2005; Volume 2. [Google Scholar]
- Morgan, B.E.; Chipman, J.W.; Bolger, D.T.; Dietrich, J.T. Spatiotemporal analysis of vegetation cover change in a large ephemeral river: Multi-sensor fusion of unmanned aerial vehicle (uav) and landsat imagery. Remote Sens. 2020, 13, 51. [Google Scholar] [CrossRef]
- Hazarika, M.K.; Honda, K. Estimation of soil erosion using remote sensing and GIS: Its valuation and economic implications on agricultural production. Sustain. Glob. Farm 2001, 1, 1090–1093. [Google Scholar]
- Djuraev, A.; Mirdjalalov, D.; Nuratdinov, A.; Khushvaktov, T.; Karimov, Y. Evaluation of soil salinity level through NDVI in Syrdarya province, Uzbekistan. Proc. E3S Web Conf. 2021, 258, 03017. [Google Scholar] [CrossRef]
- Telesca, L.; Lasaponara, R. Pre-and post-fire behavioral trends revealed in satellite NDVI time series. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Khaliq, A.; Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Chiaberge, M.; Gay, P. Comparison of satellite and UAV-based multispectral imagery for vineyard variability assessment. Remote Sens. 2019, 11, 436. [Google Scholar] [CrossRef] [Green Version]
- Navarro, J.A.; Algeet, N.; Fernández-Landa, A.; Esteban, J.; Rodríguez-Noriega, P.; Guillén-Climent, M.L. Integration of UAV, Sentinel-1, and Sentinel-2 data for mangrove plantation aboveground biomass monitoring in Senegal. Remote Sens. 2019, 11, 77. [Google Scholar] [CrossRef] [Green Version]
- Carella, E.; Orusa, T.; Viani, A.; Meloni, D.; Borgogno-Mondino, E.; Orusa, R. An Integrated, Tentative Remote-Sensing Approach Based on NDVI Entropy to Model Canine Distemper Virus in Wildlife and to Prompt Science-Based Management Policies. Animals 2022, 12, 1049. [Google Scholar] [CrossRef]
- Soria, J.; Ruiz, M.; Morales, S. Monitoring Subaquatic Vegetation Using Sentinel-2 Imagery in Gallocanta Lake (Aragón, Spain). Earth 2022, 3, 363–382. [Google Scholar] [CrossRef]
- Shamsudeen, M.; Padmanaban, R.; Cabral, P.; Morgado, P. Spatio-Temporal Analysis of the Impact of Landscape Changes on Vegetation and Land Surface Temperature over Tamil Nadu. Earth 2022, 3, 614–638. [Google Scholar] [CrossRef]
- Kawamura, K.; Akiyama, T.; Yokota, H.; Tsutsumi, M.; Yasuda, T.; Watanabe, O.; Wang, G.; Wang, S. Monitoring of forage conditions with MODIS imagery in the Xilingol steppe, Inner Mongolia. Int. J. Remote Sens. 2005, 26, 1423–1436. [Google Scholar] [CrossRef]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Use of partial-coverage UAV data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gitelson, A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and soil lines in visible spectral space: A concept and technique for remote estimation of vegetation fraction. Int. J. Remote Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Wu, W. The generalized difference vegetation index (GDVI) for dryland characterization. Remote Sens. 2014, 6, 1211–1233. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of Sentinel-2 for quantitative estimation of biophysical variables in vegetation. ISPRS J. Photogramm. Remote Sens. 2013, 82, 83–92. [Google Scholar] [CrossRef] [Green Version]
- Moges, S.; Raun, W.; Mullen, R.; Freeman, K.; Johnson, G.; Solie, J. Evaluation of green, red, and near infrared bands for predicting winter wheat biomass, nitrogen uptake, and final grain yield. J. Plant Nutr. 2005, 27, 1431–1441. [Google Scholar] [CrossRef]
- Muir, J.; Robson, A.; Rahman, M. ‘Sugar from Space’: Using Satellite Imagery to Predict Cane Yield and Variability. In Proceedings of the 40th Conference of the Australian Society of Sugar Cane Technologists (ASSCT 2018), Mackay, Australia, 18–20 April 2018. [Google Scholar]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Sozzi, M.; Kayad, A.; Marinello, F.; Taylor, J.; Tisseyre, B. Comparing vineyard imagery acquired from Sentinel-2 and Unmanned Aerial Vehicle (UAV) platform. Oeno One 2020, 54, 189–197. [Google Scholar] [CrossRef] [Green Version]
- Haula, K.; Agbozo, E. A systematic review on unmanned aerial vehicles in Sub-Saharan Africa: A socio-technical perspective. Technol. Soc. 2020, 63, 101357. [Google Scholar] [CrossRef]
- Matsushita, B.; Yang, W.; Chen, J.; Onda, Y.; Qiu, G. Sensitivity of the enhanced vegetation index (EVI) and normalized difference vegetation index (NDVI) to topographic effects: A case study in high-density cypress forest. Sensors 2007, 7, 2636–2651. [Google Scholar] [CrossRef] [Green Version]
- Villamuelas, M.; Fernández, N.; Albanell, E.; Gálvez-Cerón, A.; Bartolomé, J.; Mentaberre, G.; López-Olvera, J.R.; Fernández-Aguilar, X.; Colom-Cadena, A.; López-Martín, J.M. The Enhanced Vegetation Index (EVI) as a proxy for diet quality and composition in a mountain ungulate. Ecol. Indic. 2016, 61, 658–666. [Google Scholar] [CrossRef]
- Mehrotra, N.; Srinivasan, S. Analysing Drone and Satellite Imagery using Vegetation Indices. Available online: https://www.techforwildlife.com/blog/tag/drone (accessed on 17 May 2022).
- Gitelson, A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Sims, D.A.; Gamon, J.A. Relationships between leaf pigment content and spectral reflectance across a wide range of species, leaf structures and developmental stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide dynamic range vegetation index for remote quantification of biophysical characteristics of vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [Green Version]
- URT, The United Republic of Tanzania. The Wildlife Conservation (Wildlife Management Areas) Regulations; Ministry of Natural Resources and Tourism, Government Printer: Dar es Salaam, Tanzania, 2012; p. 68. [Google Scholar]
- Sumari, N.; Shao, Z.; Huang, M.; Sanga, C.; Van Genderen, J. Urban expansion: A geo-spatial approach for temporal monitoring of loss of agricultural land. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017 ISPRS Geospatial Week, Wuhan, China, 18–22 September 2017. [Google Scholar]
- Sumari, N.S.; Cobbinah, P.B.; Ujoh, F.; Xu, G. On the absurdity of rapid urbanization: Spatio-temporal analysis of land-use changes in Morogoro, Tanzania. Cities 2020, 107, 102876. [Google Scholar] [CrossRef]
- BWMA. The General Management Plan for Burunge Wildlife Management Area (BWMA): 2010–2020; Wildlife Division, Ministry of Natural Resources and Tourism: Dar es Salaam, Tanzania, 2010.
- Prins, H.H.; Loth, P.E. Rainfall patterns as background to plant phenology in northern Tanzania. J. Biogeogr. 1988, 15, 451–463. [Google Scholar] [CrossRef]
- Kicheleri, R.P.; Treue, T.; Kajembe, G.C.; Mombo, F.M.; Nielsen, M.R. Power struggles in the management of wildlife resources: The case of Burunge wildlife management area, Tanzania. In Wildlife Management-Failures, Successes and Prospects; IntechOpen: London, UK, 2018. [Google Scholar]
- Lee, D.E. Evaluating conservation effectiveness in a Tanzanian community wildlife management area. J. Wildl. Manag. 2018, 82, 1767–1774. [Google Scholar] [CrossRef]
- Oduor, S.O.; Kotut, K. Soda lakes of the East African Rift System: The past, the present and the future. In Soda Lakes of East Africa; Springer: Berlin/Heidelberg, Germany, 2016; pp. 365–374. [Google Scholar]
- Bonnin, N.; Van Andel, A.C.; Kerby, J.T.; Piel, A.K.; Pintea, L.; Wich, S.A. Assessment of chimpanzee nest detectability in drone-acquired images. Drones 2018, 2, 17. [Google Scholar] [CrossRef] [Green Version]
- Yonah, I.B.; Mourice, S.K.; Tumbo, S.D.; Mbilinyi, B.P.; Dempewolf, J. Unmanned aerial vehicle-based remote sensing in monitoring smallholder, heterogeneous crop fields in Tanzania. Int. J. Remote Sens. 2018, 39, 5453–5471. [Google Scholar] [CrossRef]
- Braun-Blanquet, J. Plant sociology. The study of plant communities. In Plant Sociology. Study Plant Communities, 1st ed.; McGraw-Hill Book Co., Inc.: New York, NY, USA; London, UK, 1932. [Google Scholar]
- Mangewa , L.J.; Ndakidemi, P.A.; Alward, R.D.; Kija, H.K.; Nasolwa, E.R.; Munishi, L.K. Advancing Land Use and Land Cover Classification for Conservation using UAV-based Orthoimages: A case of Burunge Wildlife Management Area, Tanzania; The Nelson Mandela African Institution of Science and Technology: Arusha, Tanzania, 2022. [Google Scholar]
- Bergqvist, G.; Wallgren, M.; Jernelid, H.; Bergström, R. Forage availability and moose winter browsing in forest landscapes. For. Ecol. Manag. 2018, 419, 170–178. [Google Scholar] [CrossRef]
- (URT) U.R.o.T. The Civil Aviation (Remotely Piloted Aircraft Systems) Regulations. 2018. Available online: https://www.tcaa.go.tz/ (accessed on 9 March 2021).
- Cruzan, M.B.; Weinstein, B.G.; Grasty, M.R.; Kohrn, B.F.; Hendrickson, E.C.; Arredondo, T.M.; Thompson, P.G. Small unmanned aerial vehicles (micro-UAVs, drones) in plant ecology. Appl. Plant Sci. 2016, 4, 1600041. [Google Scholar] [CrossRef]
- Franklin, S.E.; Giles, P.T. Radiometric processing of aerial and satellite remote-sensing imagery. Comput. Geosci. 1995, 21, 413–423. [Google Scholar] [CrossRef]
- Chavez, P.S. Image-based atmospheric corrections-revisited and improved. Photogramm. Eng. Remote Sens. 1996, 62, 1025–1035. [Google Scholar]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Young, N.E.; Anderson, R.S.; Chignell, S.M.; Vorster, A.G.; Lawrence, R.; Evangelista, P.H. A survival guide to Landsat preprocessing. Ecology 2017, 98, 920–932. [Google Scholar] [CrossRef] [Green Version]
- Pons, X.; Pesquer, L.; Cristóbal, J.; González-Guerrero, O. Automatic and improved radiometric correction of Landsat imagery using reference values from MODIS surface reflectance images. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 243–254. [Google Scholar] [CrossRef] [Green Version]
- Ekstrand, S. Landsat TM-based forest damage assessment: Correction for topographic effects. Photogramm. Eng. Remote Sens. 1996, 62, 151–162. [Google Scholar]
- Reed, D.; Anderson, T.; Dempewolf, J.; Metzger, K.; Serneels, S. The spatial distribution of vegetation types in the Serengeti ecosystem: The influence of rainfall and topographic relief on vegetation patch characteristics. J. Biogeogr. 2009, 36, 770–782. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Arkebauer, T.J.; Rundquist, D.C.; Keydan, G.; Leavitt, B. Remote estimation of leaf area index and green leaf biomass in maize canopies. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef] [Green Version]
- Huete, A.; Liu, H.; Batchily, K.; Van Leeuwen, W. A comparison of vegetation indices over a global set of TM images for EOS-MODIS. Remote Sens. Environ. 1997, 59, 440–451. [Google Scholar] [CrossRef]
- Maringa, D.; Mugambi, M.; Nathan, G.; Njoka, E.; Ouko, E. Evaluating The Resource Supply Thresholds That Trigger Livestock Movement Leading To Grazing Conflicts In Northern Kenya. Int. J. Adv. Res. Publications 2018, 2. [Google Scholar]
- R Core Team; R Development Core Team. A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018. [Google Scholar]
- Akoglu, H. User’s guide to correlation coefficients. Turk. J. Emerg. Med. 2018, 18, 91–93. [Google Scholar] [CrossRef]
- Messina, G.; Peña, J.M.; Vizzari, M.; Modica, G. A comparison of UAV and satellites multispectral imagery in monitoring onion crop. An application in the ‘Cipolla Rossa di Tropea’(Italy). Remote Sens. 2020, 12, 3424. [Google Scholar] [CrossRef]
- Dash, J.P.; Pearse, G.D.; Watt, M.S. UAV multispectral imagery can complement satellite data for monitoring forest health. Remote Sens. 2018, 10, 1216. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Senthilnath, J.; Wu, W.; Zhang, X.; Zeng, Z.; Huang, H. Radiometric calibration for multispectral camera of different imaging conditions mounted on a UAV platform. Sustainability 2019, 11, 978. [Google Scholar] [CrossRef] [Green Version]
- Kedzierski, M.; Wierzbicki, D. Radiometric quality assessment of images acquired by UAV’s in various lighting and weather conditions. Measurement 2015, 76, 156–169. [Google Scholar] [CrossRef]
- Song, B.; Park, K. Detection of aquatic plants using multispectral UAV imagery and vegetation index. Remote Sens. 2020, 12, 387. [Google Scholar] [CrossRef] [Green Version]
- Song, H.; Huang, B.; Liu, Q.; Zhang, K. Improving the spatial resolution of landsat TM/ETM+ through fusion with SPOT5 images via learning-based super-resolution. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1195–1204. [Google Scholar] [CrossRef]
- Gould, W. Remote sensing of vegetation, plant species richness, and regional biodiversity hotspots. Ecol. Appl. 2000, 10, 1861–1870. [Google Scholar] [CrossRef]
- Simonson, W.D.; Allen, H.D.; Coomes, D.A. Applications of airborne lidar for the assessment of animal species diversity. Methods Ecol. Evol. 2014, 5, 719–729. [Google Scholar] [CrossRef]
- Kerr, J.T.; Packer, L. Habitat heterogeneity as a determinant of mammal species richness in high-energy regions. Nature 1997, 385, 252–254. [Google Scholar] [CrossRef]
- Onyia, N.N.; Balzter, H.; Berrio, J.-C. Normalized difference vegetation vigour index: A new remote sensing approach to biodiversity monitoring in oil polluted regions. Remote Sens. 2018, 10, 897. [Google Scholar] [CrossRef] [Green Version]
- Charnov, E.L. Optimal foraging, the marginal value theorem. Theor. Popul. Biol. 1976, 9, 129–136. [Google Scholar] [CrossRef] [Green Version]
- De Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for vegetation monitoring: Overview and recent scientific contributions. Remote Sens. 2021, 13, 2139. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, F.; Qi, Y.; Deng, L.; Wang, X.; Yang, S. New research methods for vegetation information extraction based on visible light remote sensing images from an unmanned aerial vehicle (UAV). Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 215–226. [Google Scholar] [CrossRef]
- Nonni, F.; Malacarne, D.; Pappalardo, S.E.; Codato, D.; Meggio, F.; De Marchi, M. Sentinel-2 Data Analysis and Comparison with UAV Multispectral Images for Precision Viticulture. Proc. GI Forum 2018, 1, 105–116. [Google Scholar] [CrossRef]
- King, M.D.; Kaufman, Y.J.; Menzel, W.P.; Tanre, D. Remote sensing of cloud, aerosol, and water vapor properties from the moderate resolution imaging spectrometer(MODIS). IEEE Trans. Geosci. Remote Sens. 1992, 30, 2–27. [Google Scholar] [CrossRef] [Green Version]
| RedEdge3 | Sentinel-2 | |||||
|---|---|---|---|---|---|---|
| Wavelength (nm) | Wavelength (nm) | |||||
| Band Name | Band Number | Center | Width | Band Number | Center | Width |
| Blue | 1 | 475 | 20 | 2 | 490 | 10 |
| Green | 2 | 560 | 20 | 3 | 560 | 10 |
| Red | 3 | 668 | 10 | 4 | 665 | 10 |
| Near Infrared (NIR) | 5 | 842 | 40 | 8 | 842 | 10 |
| RedEdge | 4 | 717 | 10 | 5 | 705 | 20 |
| Vegetation Index | Formula | References | |
|---|---|---|---|
| Normalized Difference Vegetation Index (NDVI) | (1) | [33,69] | |
| Green NDVI (GNDVI) | (2) | [34,35,37]. |
| Class | Colour | NDVI | GNDVI |
|---|---|---|---|
| Very Good | >0.9 | > 0.8 | |
| >0.8–0.9 | >0.7–0.8 | ||
| >0.7–0.8 | >0.6–0.7 | ||
| >0.6–0.7 | >0.5–0.6 | ||
| Good | >0.5–0.6 | >0.4–0.5 | |
| >0.4–0.5 | >0.3–0.4 | ||
| Poor | >0.3–0.4 | >0.2–0.3 | |
| >0.2–0.3 | >0.1–0.2 | ||
| Very Poor | ≤0.2 | ≤0.1 |
| Land Cover Type | Platform | Mean | SD | CV | Skewness | 25% | 75% | ANOVA F-Test |
|---|---|---|---|---|---|---|---|---|
| Grassland | UAV | 0.50 | 0.15 | 0.30 | −0.30 | 0.40 | 0.60 | F(1, 27219) = 10,919, <0.001 |
| Sentinel-2 | 0.30 | 0.15 | 0.49 | 0.34 | 0.18 | 0.40 | ||
| Mosaic | UAV | 0.43 | 0.11 | 0.26 | 0.87 | 0.35 | 0.50 | F(1, 19164) = 13,191, <0.001 |
| Sentinel-2 | 0.23 | 0.12 | 0.53 | 0.85 | 0.13 | 0.30 | ||
| Riverine | UAV | 0.68 | 0.13 | 0.20 | −0.98 | 0.60 | 0.75 | F(1, 22908) = 2444, <0.001 |
| Sentinel-2 | 0.59 | 0.11 | 0.19 | −1.80 | 0.55 | 0.66 | ||
| Shrubland | UAV | 0.55 | 0.16 | 0.30 | −0.48 | 0.45 | 0.70 | F(1, 38517) = 7474, <0.001 |
| Sentinel-2 | 0.40 | 0.12 | 0.29 | −0.11 | 0.32 | 0.49 | ||
| Woodland | UAV | 0.63 | 0.18 | 0.29 | −0.85 | 0.50 | 0.80 | F(1, 20999) = 5824, <0.001 |
| Sentinel-2 | 0.44 | 0.15 | 0.35 | −0.82 | 0.35 | 0.55 |
| Land Cover Type | Platform | Mean | SD | CV | Skewness | 25% | 75% | ANOVA F-Test |
|---|---|---|---|---|---|---|---|---|
| Grassland | UAV | 0.47 | 0.10 | 0.22 | −0.05 | 0.40 | 0.55 | F(1, 22607) = 516, p < 0.001 |
| Sentinel-2 | 0.44 | 0.13 | 0.29 | −0.05 | 0.33 | 0.53 | ||
| Mosaic | UAV | 0.40 | 0.10 | 0.25 | 0.08 | 0.35 | 0.45 | F(1, 16497) = 74, p < 0.001 |
| Sentinel-2 | 0.38 | 0.11 | 0.28 | 0.42 | 0.30 | 0.46 | ||
| Riverine | UAV | 0.68 | 0.13 | 0.20 | −0.98 | 0.60 | 0.70 | F(1, 19878) = 772, p < 0.001 |
| Sentinel-2 | 0.66 | 0.07 | 0.11 | −1.70 | 0.64 | 0.71 | ||
| Shrubland | UAV | 0.55 | 0.16 | 0.30 | −0.48 | 0.45 | 0.55 | F(1, 37748) = 208, p < 0.001 |
| Sentinel-2 | 0.53 | 0.09 | 0.16 | −0.23 | 0.48 | 0.60 | ||
| Woodland | UAV | 0.63 | 0.18 | 0.29 | −0.85 | 0.50 | 0.70 | F(1, 22019) = 263, p < 0.001 |
| Sentinel-2 | 0.56 | 0.11 | 0.19 | −0.88 | 0.50 | 0.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mangewa, L.J.; Ndakidemi, P.A.; Alward, R.D.; Kija, H.K.; Bukombe, J.K.; Nasolwa, E.R.; Munishi, L.K. Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania. Earth 2022, 3, 769-787. https://doi.org/10.3390/earth3030044
Mangewa LJ, Ndakidemi PA, Alward RD, Kija HK, Bukombe JK, Nasolwa ER, Munishi LK. Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania. Earth. 2022; 3(3):769-787. https://doi.org/10.3390/earth3030044
Chicago/Turabian StyleMangewa, Lazaro J., Patrick A. Ndakidemi, Richard D. Alward, Hamza K. Kija, John K. Bukombe, Emmanuel R. Nasolwa, and Linus K. Munishi. 2022. "Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania" Earth 3, no. 3: 769-787. https://doi.org/10.3390/earth3030044
APA StyleMangewa, L. J., Ndakidemi, P. A., Alward, R. D., Kija, H. K., Bukombe, J. K., Nasolwa, E. R., & Munishi, L. K. (2022). Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania. Earth, 3(3), 769-787. https://doi.org/10.3390/earth3030044