
Low-Cost SDR for GNSS Interference Mitigation Using Spatial Diversity Techniques †

 , , and
, , and
Abstract
1. Introduction
2. Fundamentals of Array Processing
2.1. Signal Model
2.2. The Beamforming Principle
3. Exploiting Spatial Diversity for Interference Mitigation
3.1. Power Inversion Beamformer
3.2. Prewhitening Beamformer
4. Experimental Analysis
4.1. Architecture and Experiment Description
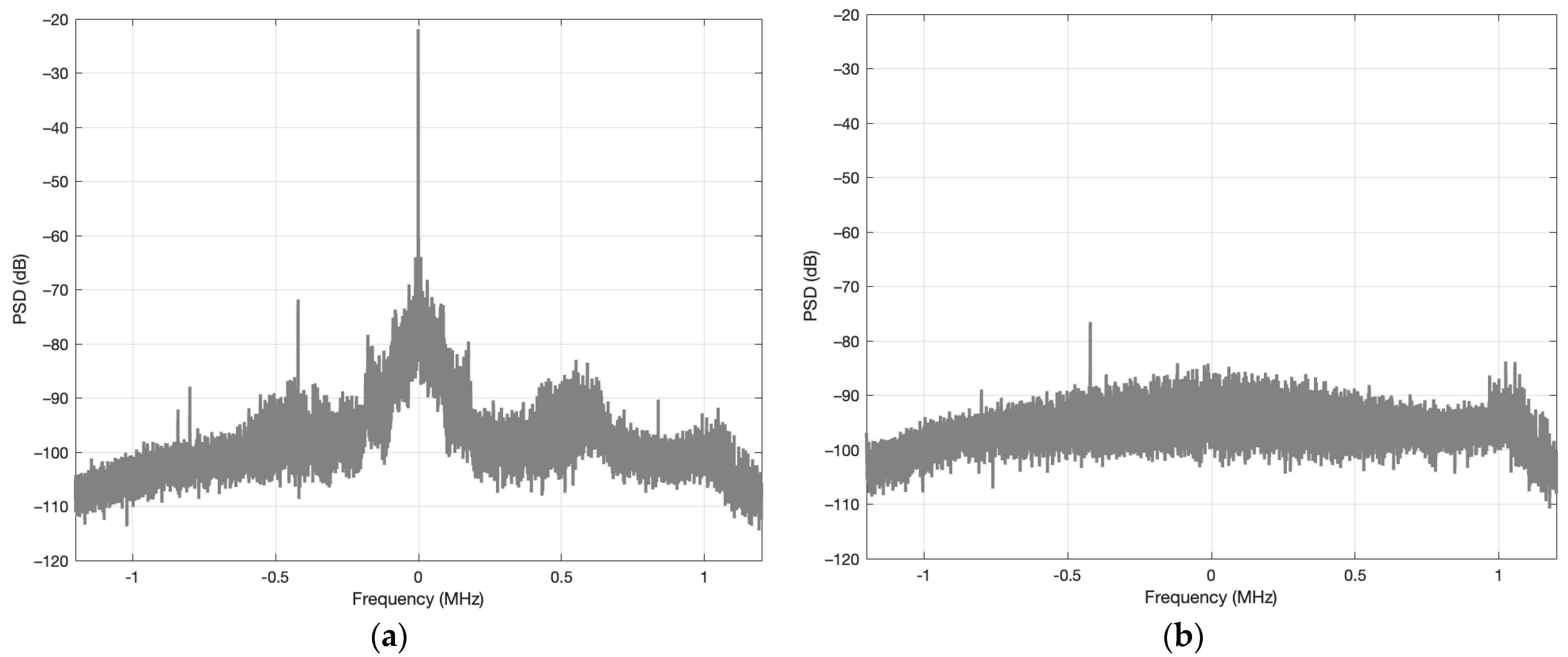
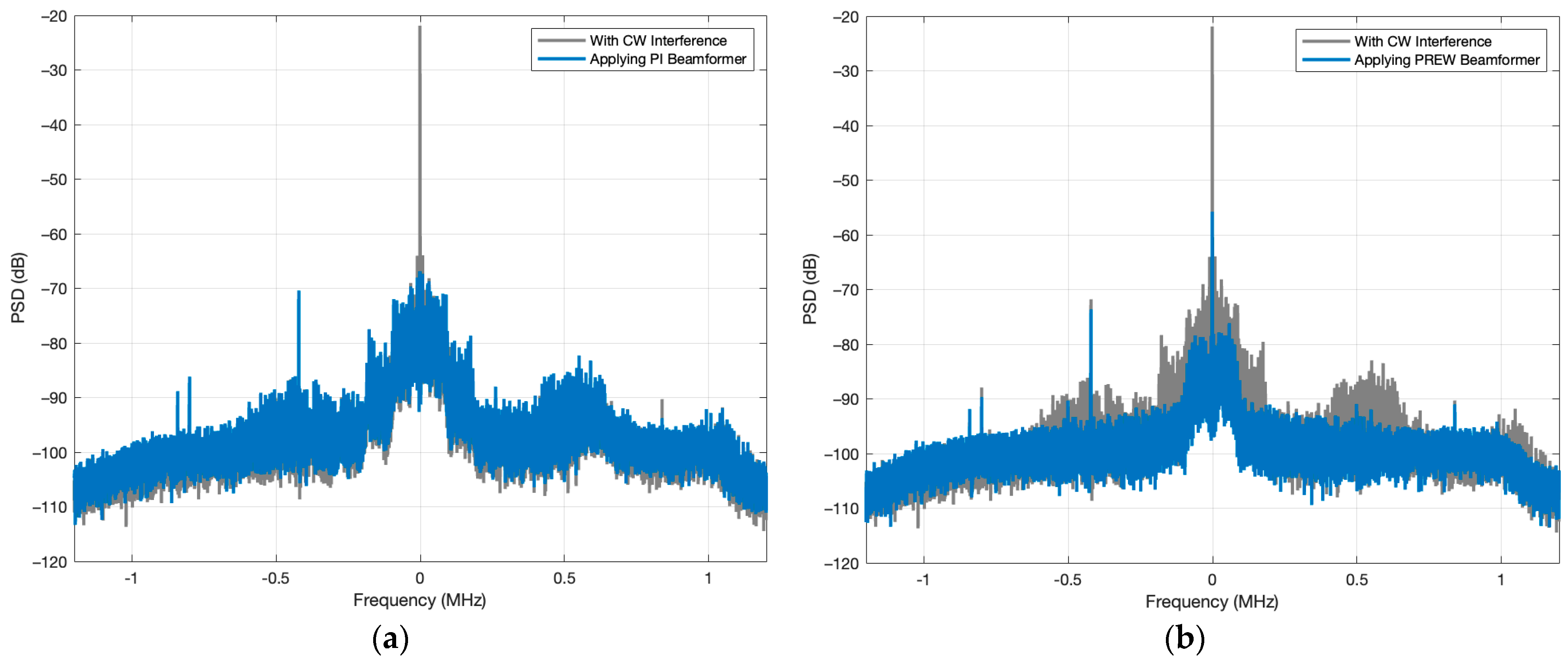
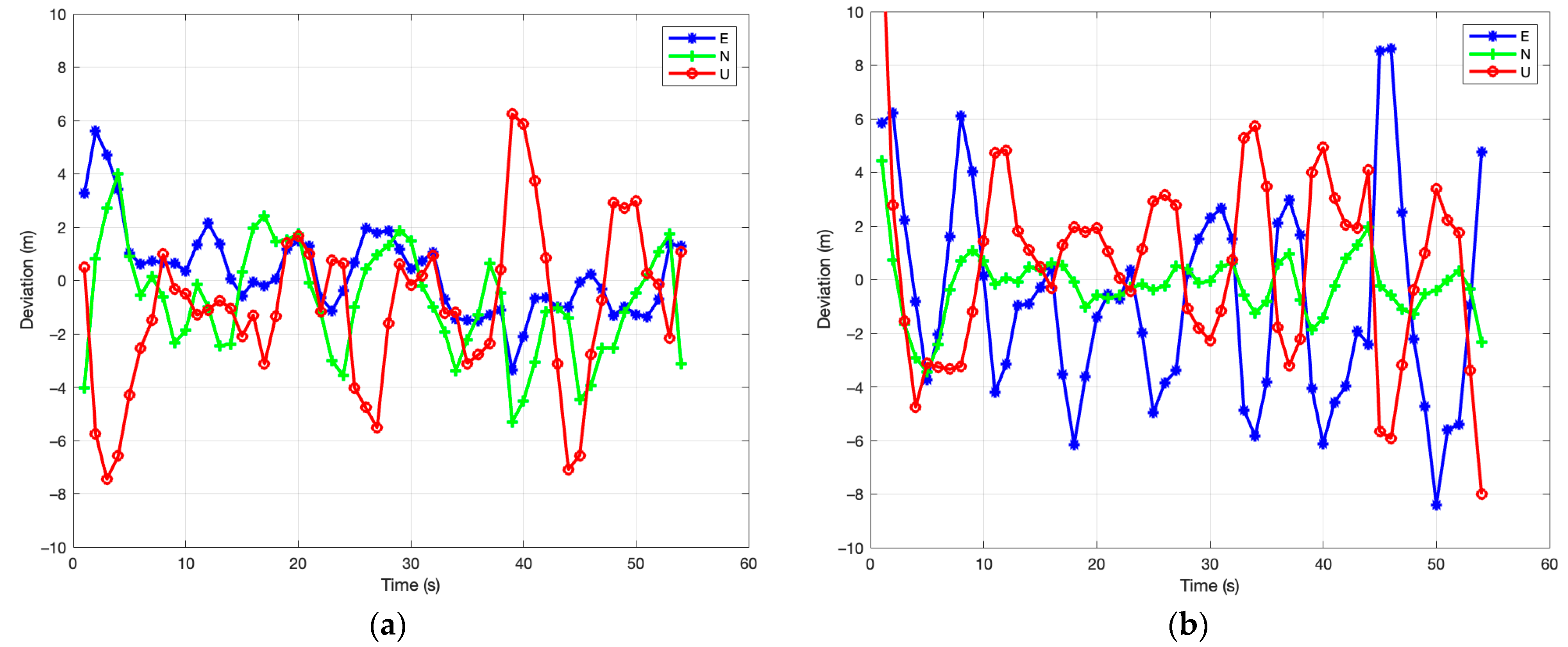
4.2. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hegarty, C.; Kaplan, E. Understanding GPS Principles and Applications, 2nd ed.; Artech: Norwood, MA, USA, 2005. [Google Scholar]
- Lam, N.H.B. Angle of Arrival Estimation for Low Power and Long Range Communication Networks; University of Antwerp: Antwerp, Belgium, 2021. [Google Scholar]
- BniLam, N.; Principe, F.; Crosta, P. Large Array Antenna Aperture for GNSS Applications. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 675–684. [Google Scholar] [CrossRef]
- Volakis, J.L.; O’Brien, A.J.; Chen, C.-C. Small and Adaptive Antennas and Arrays for GNSS Applications. Proc. IEEE 2016, 104, 1221–1232. [Google Scholar] [CrossRef]
- Williams, D.; Clark, S.; Cook, J.; Corcoran, P.; Spaulding, S. Four-Element Adaptive Array Evaluation for United States Navy Airborne Applications. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 2523–2532. [Google Scholar]
- Berz, G.; Barret, P.; Disselkoen, B.; Richard, M.; Bleeker, O.; Rocchia, V.; Jacolot, F.; Bigham, T. Interference Localization using a Controlled Radiation Pattern Antenna (CRPA). In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 3053–3062. [Google Scholar]
- Vegni, C.; Neri, A. GNSS Interference: Effects and Solutions. In Proceedings of the ION 2015 Pacific PNT Meeting, Honolulu, HI, USA, 20–23 April 2015; pp. 454–469. [Google Scholar]
- Vook, F.W.; Ghosh, A.; Thomas, T.A. MIMO and Beamforming Solutions for 5G Technology. In Proceedings of the 2014 IEEE MTT-S International Microwave Symposium (IMS2014), Tampa, FL, USA, 1–6 June 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Larsson, E.G.; Edfors, O.; Tufvesson, F.; Marzetta, T.L. Massive MIMO for next generation wireless systems. IEEE Commun. Mag. 2014, 52, 186–195. [Google Scholar] [CrossRef]
- Deng, C.; Fang, X.; Han, X.; Wang, X.; Yan, L.; He, R.; Long, Y.; Guo, Y. IEEE 802.11be Wi-Fi 7: New Challenges and Opportunities. IEEE Commun. Surv. Tutor. 2020, 22, 2136–2166. [Google Scholar] [CrossRef]
- BniLam, N.; Ergeerts, G.; Subotic, D.; Steckel, J.; Weyn, M. Adaptive probabilistic model using angle of arrival estimation for IoT indoor localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Egea-Roca, D.; Arizabaleta-Diez, M.; Pany, T.; Antreich, F.; López-Salcedo, J.A.; Paonni, M.; Seco-Granados, G. GNSS User Technology: State-of-the-Art and Future Trends. IEEE Access 2022, 10, 39939–39968. [Google Scholar] [CrossRef]
- Swindlehurst, A.; Jeffs, B.; Seco-Granados, G.; Li, J. Chapter 20. Applications of Array Signal Processing. Acad. Press Libr. Signal Process. 2014, 3, 859–953. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Stoica, P.; Sharman, K.C. Maximum likelihood methods for direction-of-arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1132–1143. [Google Scholar] [CrossRef]
- Compton, R.T. The Power-Inversion Adaptive Array: Concept and Performance. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 803–814. [Google Scholar] [CrossRef]
- Sgammini, M.; Antreich, F.; Kurz, L.; Meurer, M.; Noll, T. Blind Adaptive Beamformer Based on Orthogonal Projections for GNSS. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012. [Google Scholar]
- Borre, K.; Fernández-Hernández, I.; López-Salcedo, J.A.; Bhuiyan, M.Z.H. (Eds.) GNSS Software Receivers; Cambridge University Press: Cambridge, UK, 2022. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Sat. Availability | Avg. C/N0 [dB-Hz] | 3D RMS [m] |
|---|---|---|---|
| Only GPS signals | 9/9 | 46.164 | 1.216 |
| PI beamformer | 8/9 | 36.697 | 4.154 |
| PREW beamformer | 7/9 | 39.308 | 5.487 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pallarés-Rodríguez, L.; Gómez-Casco, D.; Bni-Lam, N.; Seco-Granados, G.; López-Salcedo, J.A.; Crosta, P. Low-Cost SDR for GNSS Interference Mitigation Using Spatial Diversity Techniques. Eng. Proc. 2025, 88, 7. https://doi.org/10.3390/engproc2025088007
Pallarés-Rodríguez L, Gómez-Casco D, Bni-Lam N, Seco-Granados G, López-Salcedo JA, Crosta P. Low-Cost SDR for GNSS Interference Mitigation Using Spatial Diversity Techniques. Engineering Proceedings. 2025; 88(1):7. https://doi.org/10.3390/engproc2025088007
Chicago/Turabian StylePallarés-Rodríguez, Lucía, David Gómez-Casco, Noori Bni-Lam, Gonzalo Seco-Granados, José A. López-Salcedo, and Paolo Crosta. 2025. "Low-Cost SDR for GNSS Interference Mitigation Using Spatial Diversity Techniques" Engineering Proceedings 88, no. 1: 7. https://doi.org/10.3390/engproc2025088007
APA StylePallarés-Rodríguez, L., Gómez-Casco, D., Bni-Lam, N., Seco-Granados, G., López-Salcedo, J. A., & Crosta, P. (2025). Low-Cost SDR for GNSS Interference Mitigation Using Spatial Diversity Techniques. Engineering Proceedings, 88(1), 7. https://doi.org/10.3390/engproc2025088007