1. Introduction
Satellite-based positioning, navigation and timing applications have become an integral part of our daily lives, which has led to a growing demand for satellite-based positioning and timing services. In recent decades, the quest for higher accuracy has led to advances in modeling the various sources of error that affect GNSS observables. As a result, position accuracies at the dm or cm level are now possible for real-time applications. In post-processing, solution accuracy can even reach the millimeter range.
High-precision GNSS solutions have been around since the late 1990s (e.g., [
1]). They have primarily served the surveying, construction and agricultural industries with real-time positioning and navigation solutions based on GNSS signal measurements and correction data. Recently, the Galileo High-Accuracy Service (HAS) was declared operational and is expected to benefit various old and new markets and applications such as maritime transport, precision agriculture, drones and autonomous driving, to name a few.
In recent years, the reliability of the navigation solution has become increasingly important too. The applications mentioned have different performance requirements. For example, the requirements of a highly regulated sector such as the automotive industry, where safety-critical applications are operated, differ significantly from the requirements f non-critical applications such as an app for finding nearby e-scooters. Specially, in critical applications, GNSS performance must be closely monitored.
The performance of each GNSS is described in the form of reports based on key performance indicators (KPIs), which are made available online by the respective operators (e.g., [
2,
3,
4,
5]). For example, the operators of the Galileo system currently publish quarterly performance reports for the Open Service (OP), the High-Accuracy Service (HAS) and the Search and Rescue Service (SAR), which are made available online at [
2]. The GNSS literature also includes system performance comparisons and/or anomaly detection studies conducted independently by the system providers (e.g., [
6,
7]).
The need for an independent GNSS performance assessment is a major motivation for this contribution too. At DLR’s Galileo Competence Center, we are developing and continuously improving a system for characterizing the performance of all four global GNSSs and their services, which also offers monitoring and reporting functions. The Galileo HAS is currently integrated into this system.
This article is structured as follows. The next section provides an overview of the monitoring system. Selected performance characteristics of the four global navigation systems are then discussed. The HAS Internet Data Distribution (IDD) component is then evaluated. The paper is summarized and concluded in the final section.
2. System Overview
At DLR’s Galileo Competence Center, a system for analyzing and monitoring GNSS performance was developed. The aim is to continuously monitor the quality of the navigation signal, the transmitted messages and data as well as the quality of the positioning solution in order to recognize anomalies early and to pass this information on to the interested users [
8]. Our aim is to simplify long-term analysis and real-time performance monitoring using a dedicated database. In addition, this is achieved through user-friendly visualizations that are made, in part, publicly available on a dedicated website (see [
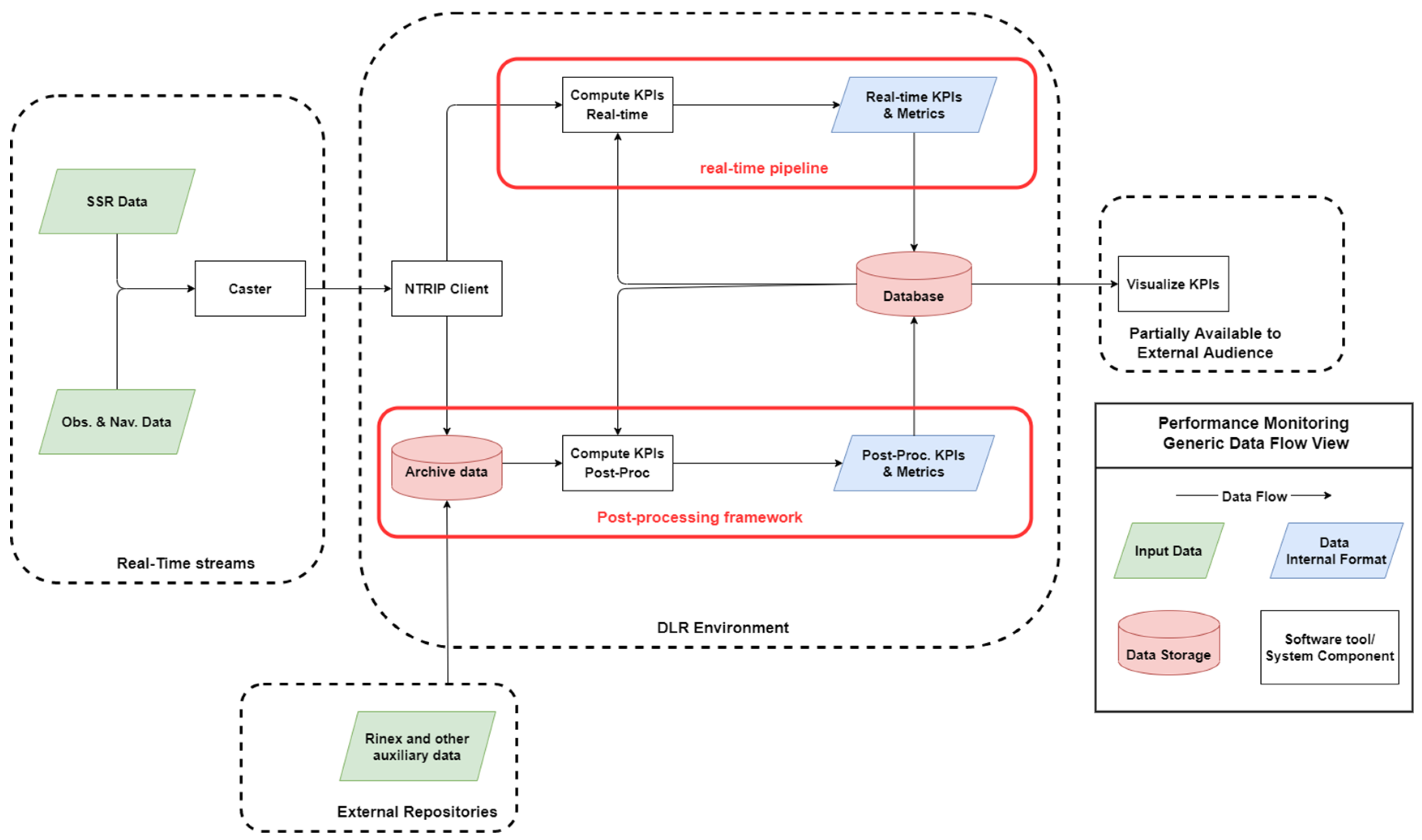
9]) or through dedicated dashboarding tools for internal use. The functional overview of the system is shown in
Figure 1.
Data are continuously collected and processed either in real-time or in post-processing to evaluate the performance of the various GNSS services. Data presented in this contribution come from the post-processing framework. The RTKLib open source tool [
10] is currently utilized as an SPP positioning engine. The BNC open source tool [
11] is utilized for estimating HAS-based positioning solutions as well as for storing the real-time streams in our database. Data downloaders, data parsers, database importers and other software components for data cleansing, statistical analysis and data visualization purposes are in-house developments.
3. Performance Assessment
The system calculates various GNSS parameters and evaluate the performance of the four GNSSs. Some of the performance data are made publicly available in [
9]. A description of the content of the current website version can be found in [
8]. This section reviews the satellites’ health status and the code-based positioning accuracy of each navigation system at selected locations.
3.1. Satellite Health Status
The computation of the satellite health status for the corresponding Galileo services and signals is described in [
12]. Other system providers uses different definitions. The European GNSS service center (GSC) provides Galileo users with relevant information on the system’s status [
13]. In addition, Service Notices and Notice Advisory to Galileo Users (NAGUs) are provided to registered users about events affecting the Galileo services.
In order to have a common metric for the four systems, a daily metric for each PRN is computed.
Figure 2 shows the daily satellite health status for each PRN and each system for a selected time interval. This daily metric can take the following values:
Healthy: All signals for a specific PRN are flagged as healthy for all epoch entries in the navigation data for the corresponding day.
Unhealthy: At least one signal for a specific PRN is flagged as unhealthy for all epoch entries in the navigation data of the corresponding day.
Status Change: The health status of the signals for a specific PRN has changed during the corresponding day.
Not Available: No navigation data entries for a specific PRN were available in the broadcast data during the corresponding day.
Figure 2 shows in a bar chart the percentage of days on which the above-mentioned flags were assigned to a specific PRN during a selected period. The data for each system are presented in separate charts. The bar charts for the Galileo system shows 23 PRNs. Most Galileo PRNs were flagged as healthy for more than 99% of the time. E03, E05, E25 and E33 had slightly lower percentages. In
Table 1, our satellite health metric is summarized for all Galileo PRNs. E14 and E18 are not included in the figure and table below as they are not considered operational satellites. However, it should be noted that they are available most of the time in the RINEX data used for this analysis. These two PRNs were flagged as unhealthy 86% of the time and as unavailable the remaining 14% of the time during this 12-month period.
Figure 2c,d also show that this performance indicator is slightly worse for the BeiDou and GLONASS systems.
3.2. Single-Point Positioning
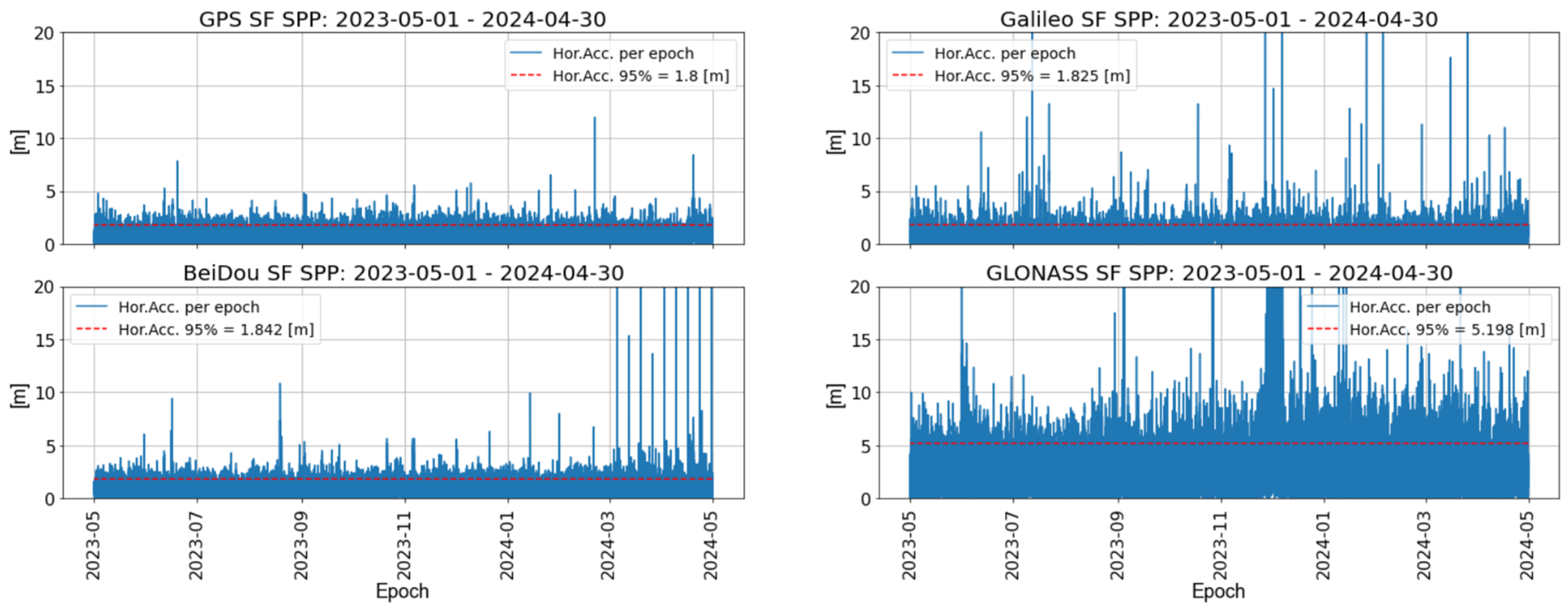
This section evaluates the performance of code-based single-frequency (SF) positioning for each system at an exemplary reference station location (i.e., BRUX station) and for a selected period of 12 months. Daily RINEX observation and navigation files are used as input data. Such data are publicly available in [
14] or in other archives. The positioning solutions are calculated every 30 s.
In
Figure 3, the positioning performance for each system is evaluated by plotting the horizontal positioning accuracy per epoch and by calculating the 95th percentile over the entire time range. During data processing, the influence of the ionosphere is mitigated by the use of broadcast correction parameters. Since GLONASS does not transmit ionospheric correction data, the ionospheric range delay for GLONASS signals is not compensated for in the results. The elevation cut-off angle is set to 10° and the Saastamoinen model is chosen for the mitigation of tropospheric biases [
9]. The analysis here is based on positioning solutions obtained with the RTKLib tool.
The per-system overall 95th percentiles of the horizontal accuracy indicate small deviations between the GPS, Galileo and BeiDou systems for the BRUX location in the mentioned time frame. As can be seen in the corresponding sub-graph, the Galileo data contain more epochs with large error magnitudes, which influence also the calculated statistics. These effects will be analyzed in more details in the future. The low number of satellites currently in orbit seems to also play a role in this case. It should be noted that the deviations in the positioning accuracy between the systems have different characteristics at other station locations. One reason for this, in addition to the different instrumentation installed, is the local station’s nearby environment-related multipath effect (e.g., [
15]). On our webpage [
9], there is a separate section for local performance analyses in which similar performance results are presented for a list of 33 stations distributed around the globe.
4. HAS IDD Service Assessment
The Galileo HAS corrections consist of PPP corrections applicable to the reference Galileo and GPS navigation messages and ranging measurements. They currently include orbit, clock and code bias parameters. Phase biases are not currently available but will be added in the near future. The correction terms are provided through two redundant and complementary channels. The HAS Signal-in-Space (SiS) channel [
16] via the E6 signal (C/NAV pages) and the HAS Internet Data Distribution (IDD) channel [
17] are utilized for the provision of the state space representation (SSR) data over the internet. In the following sections, we will focus on the HAS IDD channel.
4.1. HAS IDD Raw Data
In the actual Galileo HAS level 1 (SL1) orbit, clock and signal bias corrections are broadcasted. The Galileo HAS corrections are currently based on an orbit determination and time synchronization (ODTS) algorithm running every 30 min using 3-day data arcs and sequential clock estimation [
18,
19].
The HAS data from the real-time stream are continuously recorded with the BNC tool. These data are archived as daily files which are then parsed and pre-processed before being imported into the database. The main data cleansing checks performed on the SSR data are as follows: checking for missing data or data gaps, detecting outliers and identifying duplicates.
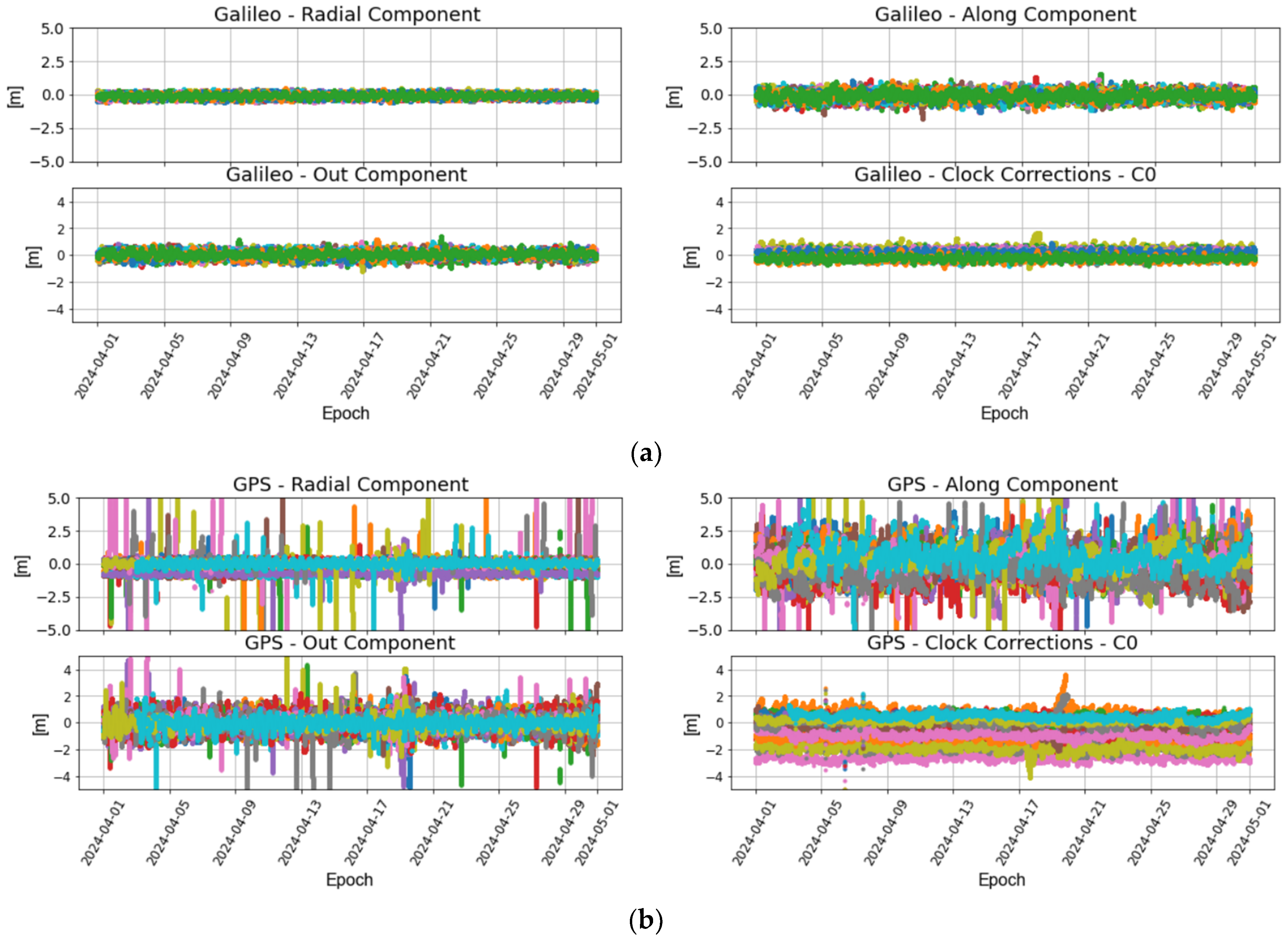
Figure 4 shows orbit and clock correction data for an exemplary time interval of one month.
Figure 4a illustrates the data for all Galileo PRNs available in the stream and
Figure 4b shows the corresponding data for the GPS system. Small data outages that do not affect the end-user performance are noticed in the streamed data. In
Figure 4b, for example, you can see that the corrections for a particular GPS PRN, shown in light blue, are missing for the first few days. Interested users can be informed about data interruptions via the corresponding NAGU messages distributed by the service provider.
The data shown in
Figure 4 are statistically summarized in
Table 2.
Figure 4 and
Table 2 indicate that the magnitude of the GPS SSR corrections is larger than the magnitude of the corresponding Galileo data, which is an indication of the more precise Galileo broadcast orbits and clocks. The availability of the HAS IDD service component is 100% during the one-month example time interval under analysis in this paper.
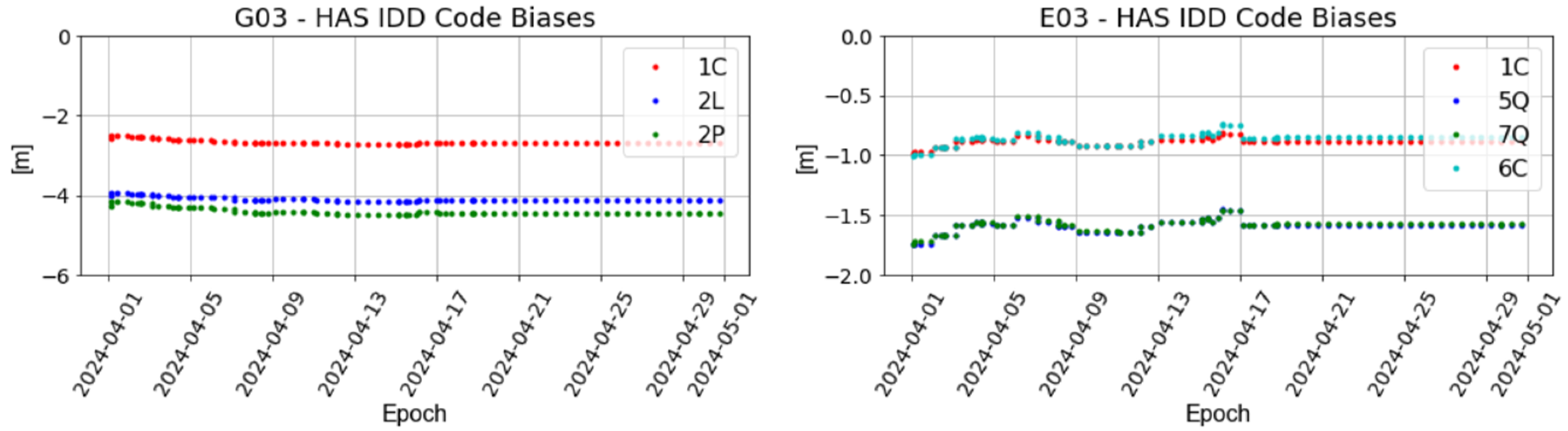
Finally, the available code biases for GPS 1C, 2L and 2P and for Galileo 1C, 5Q, 7Q and 6C signals are updated (i.e., their value changes) a few times a day, usually less than four. In
Figure 5, the corresponding data are illustrated for the one-month period and for two example PRNs. These correction parameters were also continuously available in the HAS data stream during the study interval.
4.2. HAS-Based Positioning
In addition to storing the raw HAS correction data in our database and performing statistical analyses, the HAS data are also used for positioning purposes. In our post-processing framework, the archived daily HAS datasets are processed together with RINEX observation and navigation data to estimate station coordinates at various IGS station locations around the globe. The flowchart shown in
Figure 6 illustrates the various functions performed by our software tools. The BNC tool is used as a sub-process to generate station solutions and other associated data. The positioning engine can be changed at any time to test other tools and/or our own implementations.
The positioning tool is configured to perform PPP in post-processing mode with HAS and RINEX daily files. Ionosphere-free linear combinations of code and phase observations are processed to remove the first-order ionospheric effects. An elevation mask of 10° is selected together with an elevation-dependent weighting for both the phase and code observations. Phase center corrections of the satellite and the receiver antennas are considered during data processing together with correction models for the phase wind-up effect [
20] and the earth tides. The SSR data are utilized for correcting the satellite orbit and clocks as well as the code observations. The tool employs an extended Kalman filter estimation process, where the state vector contains the station coordinates, the receiver clock error, the tropospheric delay and the floating ambiguities for each PRN. The solution is estimated every 30 s.
In
Figure 7, as with the SPP data, the positioning performance for the HAS is evaluated by plotting the horizontal positioning accuracy per epoch and by calculating the 95th percentile over the entire time range. The time span in this case is one month. HAS-based solutions are estimated at a 30 s rate. The horizontal accuracy is below the 20 cm threshold for 95% of the epochs for three stations, as indicated by the red dashed line in each subfigure. Most of the spikes visible in
Figure 7 are associated with time intervals at the beginning of each day when the solution had not yet converged to the dm level. An analysis of the solution’s convergence time is beyond the scope of this paper. We plan to carry out such an analysis in the near future using 1 Hz data.
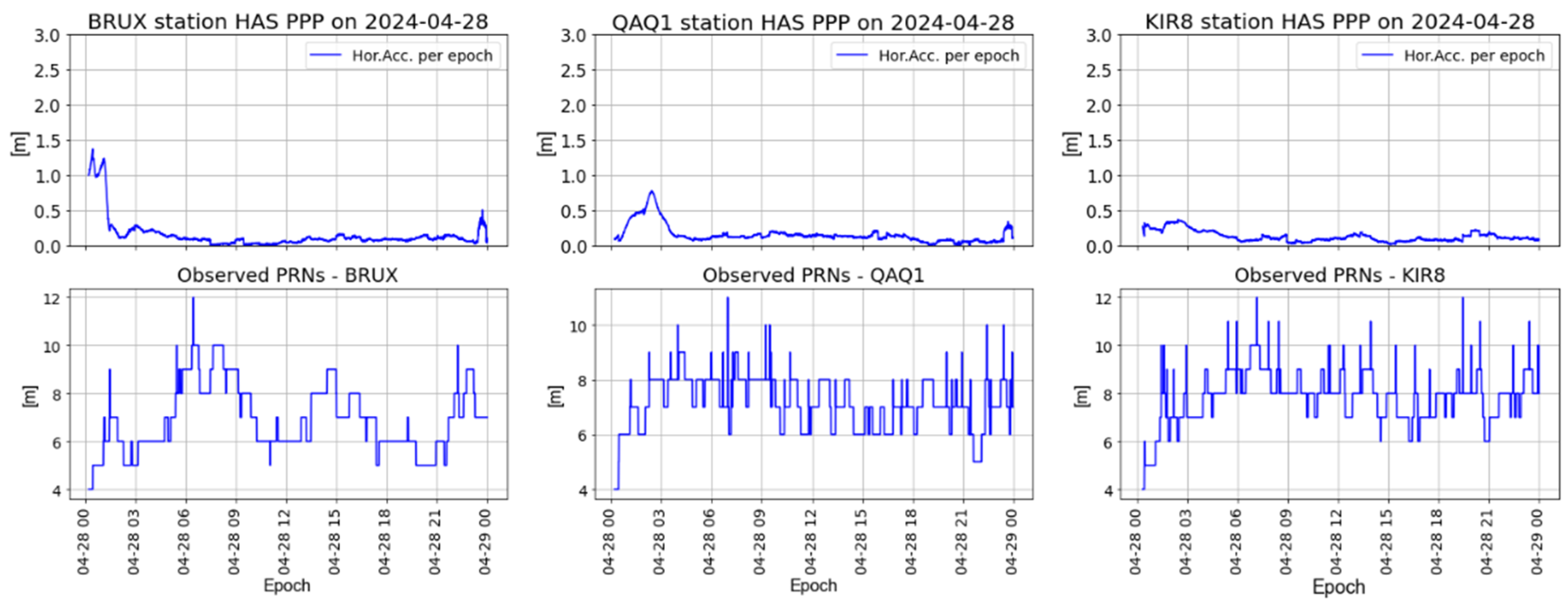
Figure 8 illustrates the HAS-based positioning solutions at three IGS stations for one day versus the number of satellites available. The first plot on the left shows the solution for a station located in Brussels, Belgium. The 95 percentiles of the horizontal accuracy are of the order of 11 cm and the corresponding one for the vertical accuracy is of the order of 28 cm. The plot in the middle panel illustrates the solutions for a station located in Qaqortoq, Greenland. In this case, the 95th percentiles of the horizontal and vertical accuracies are of the order of 14 cm and 35 cm, respectively. Finally, the right panel of
Figure 8 shows the solution computed at a station located in Kiruna, Sweden; in this case, the corresponding horizontal and vertical accuracies are of the order of 15 cm and 40 cm, respectively.
5. Summary
Disruptions to GNSS-based services are becoming a global problem. There is a growing need for systems to monitor and detect anomalous GNSS behavior. We are developing such a system at DLR’s Galileo Competence Centre. The first version of the system has been in operation for several years and is under continuous development. In this article, the above developments are used to evaluate certain GNSS performance parameters. We also describe how we have developed our system for monitoring the performance of the HAS IDD service component. The results of this first analysis of the new service with our system show the continuous availability of the internet distribution component of the service and a horizontal positioning performance in the order of a few centimeters for the selected time period and for the selected station locations.
Author Contributions
Conceptualization, M.S., J.F., K.L., W.D. and B.R.; methodology, M.S., J.F. and K.L.; software, M.S., K.L., W.D. and J.F.; validation, M.S.; formal analysis, M.S.; resources, W.D. and J.F.; data curation, M.S., K.L. and W.D.; writing—original draft preparation, M.S.; writing—review and editing, K.L., W.D., B.R. and J.F.; visualization, M.S.; supervision, J.F.; project administration, K.L. and W.D.; funding acquisition, J.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original data presented in the study are openly available by via the International GNSS Service “
https://igs.org/ (accessed on 22 April 2024)” and are were downloaded from NASA’s Archive of Space Geodesy Data—Crustal Dynamics Data Information System or the Galileo Service Center caster, which are subject to a registration process.
Acknowledgments
The authors would like to thank Rebecca Brydon, Luca Spataro, Ilinca Ioanid, Lukasz Greda and other colleagues for their invaluable discussions on topics related to this paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- European GNSS Service Center. Available online: https://www.gsc-europa.eu/electronic-library/performance-reports (accessed on 12 April 2024).
- GPS Performance and Specifications. Available online: https://www.gps.gov/technical/ps/#spsps (accessed on 12 April 2024).
- GLONASS System Documents. Available online: https://glonass-iac.ru/en/user_performance/ (accessed on 12 April 2024).
- BeiDou Monitoring and Evaluation. Available online: http://en.beidou.gov.cn/SYSTEMS/Monitoringandevaluation/ (accessed on 12 April 2024).
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Comparing the ‘Big 4’—A User’s View on GNSS Performance. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS) 2020, Portland, OR, USA, 20–23 April 2020; pp. 407–418. [Google Scholar] [CrossRef]
- Heng, L.; Gao, G.X.; Walter, T.; Enge, P. GPS Signal-in-Space Anomalies in the Last Decade: Data Mining of 400,000,000 GPS Navigation Messages. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 3115–3122. [Google Scholar]
- Greda, L.; Lutz, K.; Smyrnaios, M.; Dilg, W.; Schilling, T.; Ioanid, I.; Thölert, S.; Allende, A.G.; Kriegel, M.; Spataro, L.; et al. Performance analysis for Galileo and other GNSS at the DLR Galileo Competence Center. In Proceedings of the 10th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, NAVITEC 2022, Noordwijk, The Netherlands, 7 April 2022. Online Event. [Google Scholar]
- GNSS Performance Monitoring by DLR. Available online: https://gnss-monitoring.dlr.de (accessed on 16 April 2024).
- Takasu, T. RTKLIB v.2.4.3, GitHub Repository. Available online: https://github.com/tomojitakasu/RTKLIB (accessed on 10 May 2023).
- BKG Ntrip Client (BNC) v.2.13.0. Available online: https://igs.bkg.bund.de/ntrip/bnc (accessed on 16 April 2024).
- European Union. Galileo high accuracy service definition document (HAS SDD). European Union Agency for the Space Programme (EUSPA) Issue 1.0. 2023. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-HAS-SDD_v1.0.pdf (accessed on 16 April 2024).
- European GNSS Service Centre. Available online: https://www.euspa.europa.eu/eu-space-programme/galileo/european-gnss-service-centre (accessed on 16 April 2024).
- Noll, C. The Crustal Dynamics Data Information System: A resource to support scientific analysis using space geodesy. Space Res. 2010, 45, 1421–1440. [Google Scholar] [CrossRef]
- Smyrnaios, M. Carrier-Phase Multipath in Satellite-Based Positioning. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, 2016. Available online: https://www.repo.uni-hannover.de/handle/123456789/8915 (accessed on 16 April 2024). [CrossRef]
- European Union. Galileo high accuracy service signal-in-space interface control document (HAS SIS ICD). European Union Agency for the Space Programme (EUSPA) Issue 1.0. 2022. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_SIS_ICD_v1.0.pdf (accessed on 16 April 2024).
- European Union. Galileo High Accuracy Service Internet Data Distribution Interface Control Document (HAS IDD ICD). European Union Agency for the Space Programme (EUSPA). Issue 1.1, 2023. (Document is Only Available After Registration). Available online: https://www.gsc-europa.eu/electronic-library/programme-reference-documents (accessed on 16 April 2024).
- Fernandez-Hernandez, I.; Chamorro-Moreno, A.; Cancela-Diaz, S.; Calle-Calle, J.D.; Zoccarato, P.; Blonski, D.; Senni, T.; Javier de Blas, F.; Hernandez, C.; Simon, J.; et al. Galileo high accuracy service: Initial definition and performance. GPS Sol. 2022, 26, 64. [Google Scholar] [CrossRef]
- Martini, I.; Susi, M.; Cucchi, L.; Fernandez-Hernandez, I. Galileo high accuracy service performance and anomaly mitigation capabilities. GPS Sol. 2024, 28, 25. [Google Scholar] [CrossRef]
- Wu, J.; Wu, S.; Hajj, G.; Bertiguer, W.; Lichten, S. Effects of Antenna Orientation on GPS Carrier Phase Measurements. Manuscripta Geod. 1993, 18, 91–98. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}