
Numerical Study of a Microfluidic-Based Strain Sensor: Proof of Concept †

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
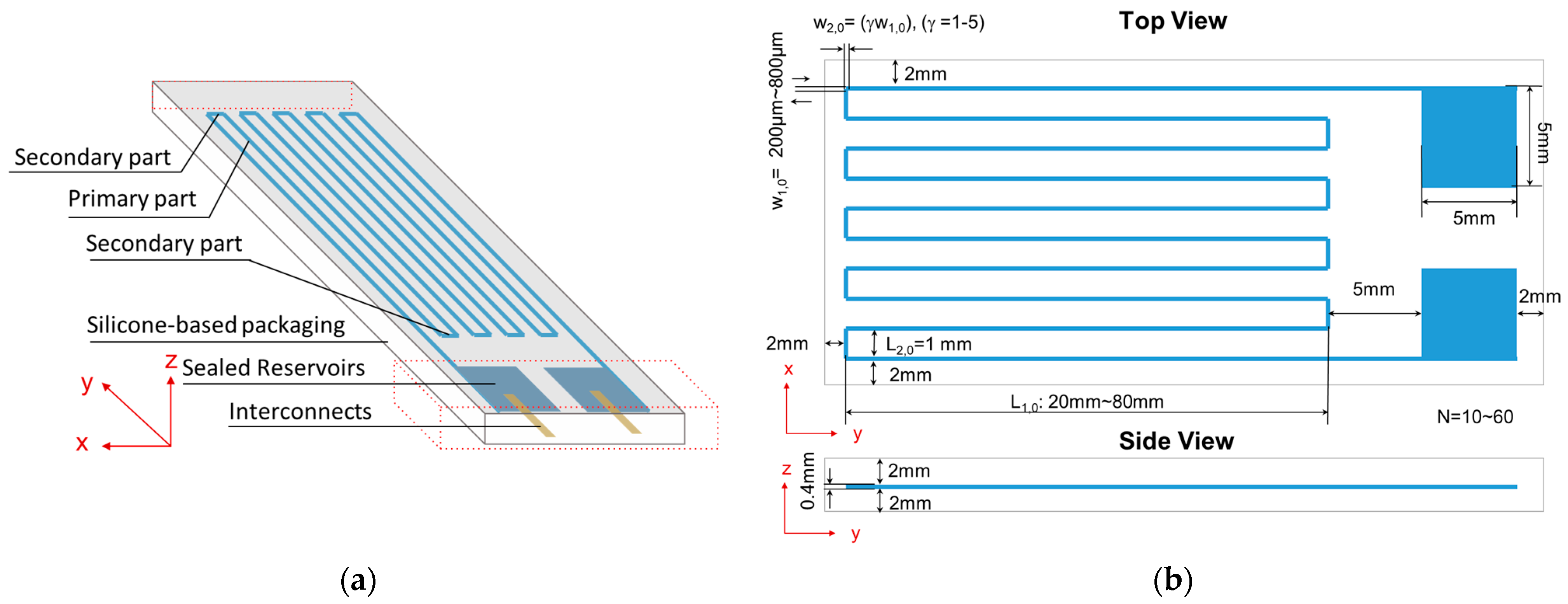
2.1. Sensor Configuration
2.2. Theoretical Model
2.3. Finite Element Model
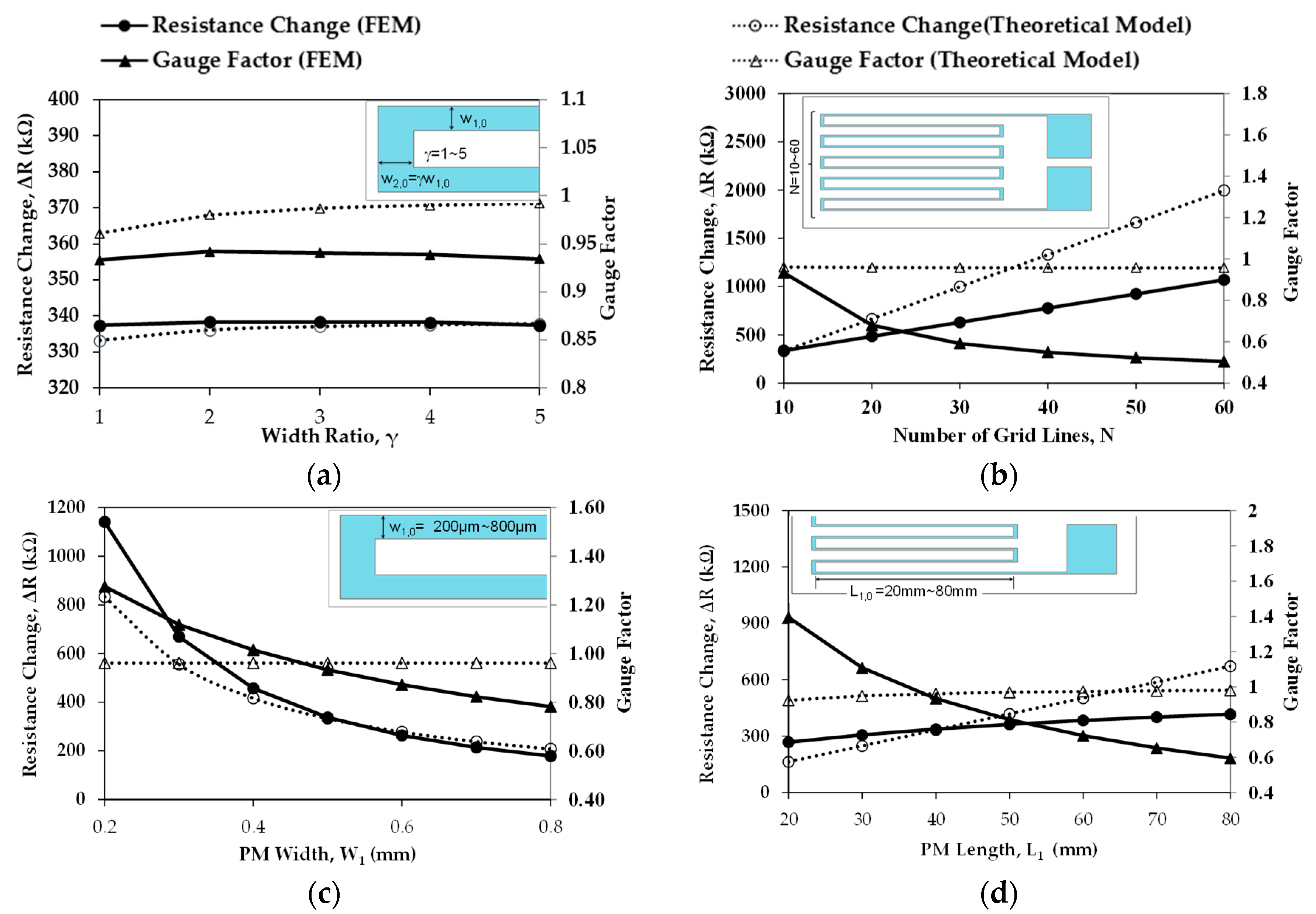
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, Z.; Su, B.; Gong, S.; Wang, Y.; Yap, L.W.; Simon, G.P.; Cheng, W. Liquid-wetting-solid strategy to fabricate stretchable sensors for human-motion detection. ACS Sens. 2016, 1, 303–311. [Google Scholar] [CrossRef]
- Liu, Y.; Pharr, M.; Salvatore, G.A. Lab-on-skin: A review of flexible and stretchable electronics for wearable health monitoring. ACS Nano 2017, 11, 9614–9635. [Google Scholar] [CrossRef] [PubMed]
- Gandla, S.; Chae, H.; Kwon, H.-J.; Won, Y.; Park, H.; Lee, S.; Song, J.; Baek, S.; Hong, Y.-D.; Kim, D. Ultrafast prototyping of large-area stretchable electronic systems by laser ablation technique for controllable robotic arm operations. IEEE Trans. Ind. Electron. 2021, 69, 4245–4253. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, L.; Luo, Y.; Ding, R. A stretchable and large-scale guided wave sensor network for aircraft smart skin of structural health monitoring. Struct. Health Monit. 2021, 20, 861–876. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Schubert, D.W. Highly sensitive ultrathin flexible thermoplastic polyurethane/carbon black fibrous film strain sensor with adjustable scaffold networks. Nano-Micro Lett. 2021, 13, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Wu, Y.; Nie, M.; Wang, Q.; Liu, Y. Highly Stretchable and Conductive Carbon Fiber/Polyurethane Conductive Films Featuring Interlocking Interfaces. ACS Appl. Mater. Interfaces 2021, 13, 38656–38665. [Google Scholar] [CrossRef] [PubMed]
- Shajari, S.; Ramakrishnan, S.; Karan, K.; Sudak, L.J.; Sundararaj, U. Ultrasensitive wearable sensor with novel hybrid structures of silver nanowires and carbon nanotubes in fluoroelastomer: Multi-directional sensing for human health monitoring and stretchable electronics. Appl. Mater. Today 2022, 26, 101295. [Google Scholar] [CrossRef]
- Yang, J.; Cao, Q.; Tang, X.; Du, J.; Yu, T.; Xu, X.; Cai, D.; Guan, C.; Huang, W. 3D-Printed highly stretchable conducting polymer electrodes for flexible supercapacitors. J. Mater. Chem. A 2021, 9, 19649–19658. [Google Scholar] [CrossRef]
- Zarei Darani, S.; Naghdabadi, R. An experimental study on multiwalled carbon nanotube nanocomposite piezoresistivity considering the filler agglomeration effects. Polym. Compos. 2021, 42, 4707–4716. [Google Scholar] [CrossRef]
- Ke, K.; Bonab, V.S.; Yuan, D.; Manas-Zloczower, I. Piezoresistive thermoplastic polyurethane nanocomposites with carbon nanostructures. Carbon 2018, 139, 52–58. [Google Scholar] [CrossRef]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S. Stretchable silicon nanoribbon electronics for skin prosthesis. Nat. Commun. 2014, 5, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Cheng, P.; Gu, W.; Shen, J.; Ghosh, A.; Beskok, A.; Hao, Z. Performance study of a PDMS-based microfluidic device for the detection of continuous distributed static and dynamic loads. J. Micromech. Microeng. 2013, 23, 085007. [Google Scholar] [CrossRef]
- Shen, J.; Stacey, M.; Hao, Z. A Distributed-Deflection Sensor With a Built-In Probe for Conformal Mechanical Measurements of Costal Cartilage at Its Exterior Surface. IEEE Sens. J. 2017, 18, 822–829. [Google Scholar] [CrossRef]
- Huang, M.-M.; Jiang, Y.; Sasisanker, P.; Driver, G.W.; Weingärtner, H. Static relative dielectric permittivities of ionic liquids at 25 C. J. Chem. Eng. Data 2011, 56, 1494–1499. [Google Scholar] [CrossRef]
- Fouillet, Y.; Parent, C.; Gropplero, G.; Davoust, L.; Achard, J.L.; Revol-Cavalier, F.; Verplanck, N. Stretchable material for microfluidic applications. In Proceedings of the Multidisciplinary Digital Publishing Institute Proceedings, Paris, France, 3–6 September 2017; p. 501. [Google Scholar]



{kind=link}
{kind=link}
| Study Relation between | Number of Grid Lines N | |||
|---|---|---|---|---|
| 10~60 (10 increment) | 1 | 40 | 0.5 | |
| 10 | 1~5 (1 increment) | 40 | 0.5 | |
| 10 | 1 | 20~80 (10 increment) | 0.5 | |
| 10 | 1 | 40 | 0.2~0.8 (0.1 increment) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Mei, L.; Jones, D.K.; Chen, W.; Wang, X.; Geng, M. Numerical Study of a Microfluidic-Based Strain Sensor: Proof of Concept. Eng. Proc. 2022, 27, 46. https://doi.org/10.3390/ecsa-9-13323
Shen J, Mei L, Jones DK, Chen W, Wang X, Geng M. Numerical Study of a Microfluidic-Based Strain Sensor: Proof of Concept. Engineering Proceedings. 2022; 27(1):46. https://doi.org/10.3390/ecsa-9-13323
Chicago/Turabian StyleShen, Jiayue, Lanju Mei, Daniel K. Jones, Weiru Chen, Xianping Wang, and Minghao Geng. 2022. "Numerical Study of a Microfluidic-Based Strain Sensor: Proof of Concept" Engineering Proceedings 27, no. 1: 46. https://doi.org/10.3390/ecsa-9-13323
APA StyleShen, J., Mei, L., Jones, D. K., Chen, W., Wang, X., & Geng, M. (2022). Numerical Study of a Microfluidic-Based Strain Sensor: Proof of Concept. Engineering Proceedings, 27(1), 46. https://doi.org/10.3390/ecsa-9-13323