
Numerical Study of a PVDF-Based Strain Sensor for Damage Detection of an Asphalt Concrete Pavement Subject to Dynamic Loads †

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Sensor Configuration
2.2. Finite Element Model
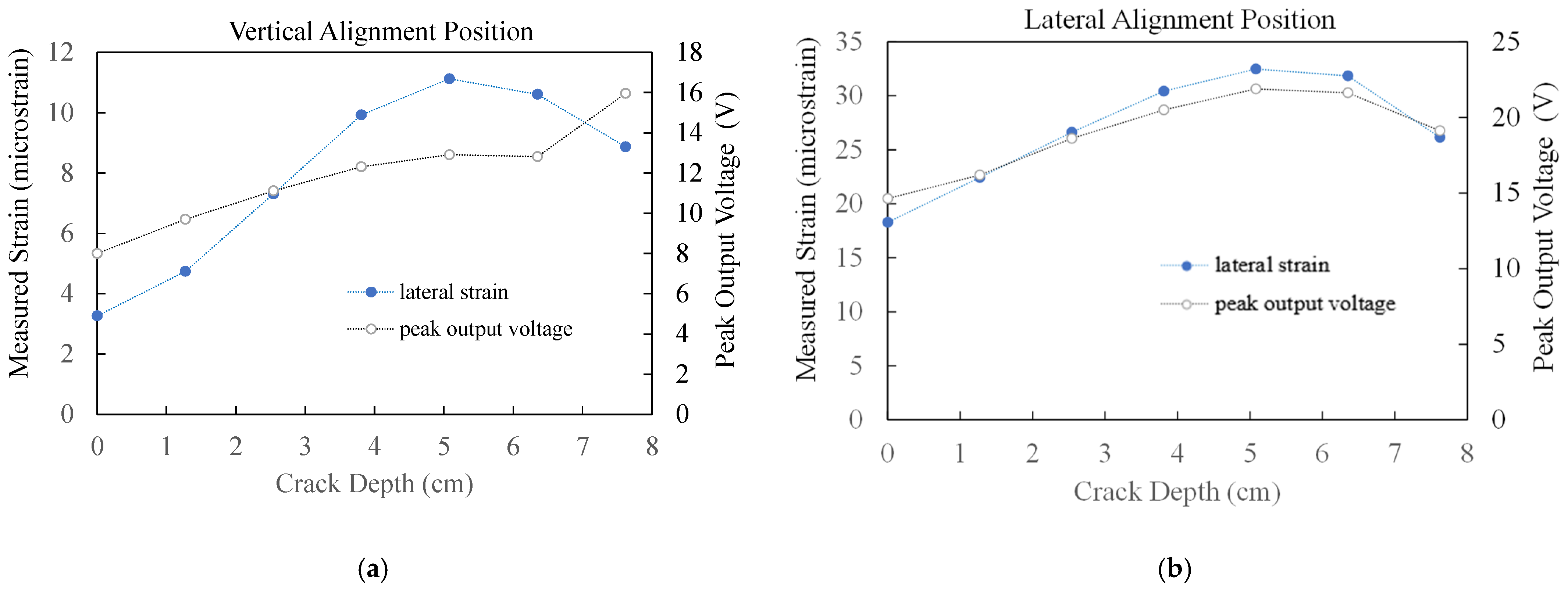
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Adlinge, S.S.; Gupta, A. Pavement deterioration and its causes. Int. J. Innov. Res. Dev. 2013, 2, 437–450. [Google Scholar]
- Salvi, R.; Ramdasi, A.; Kolekar, Y.A.; Bhandarkar, L.V. Use of ground-penetrating radar (GPR) as an effective tool in assessing pavements—A review. In Geotechnics for Transportation Infrastructure; Springer: Singapore, 2019; pp. 85–95. [Google Scholar] [CrossRef]
- Georgiou, P.; Loizos, A. Parametric optimization of ground penetrating radar approach for assessing asphalt pavement surface layers compaction. J. Appl. Geophys. 2020, 182, 104187. [Google Scholar] [CrossRef]
- Behera, H.K.; Pradhan, S.; Das, S.S. Low cost ultrasonic roughometer for pavement roughness measurement. Innov. Infrastruct. Solut. 2021, 6, 1–13. [Google Scholar] [CrossRef]
- du Tertre, A.; Serhan Kırlangıç, A.; Cascante, G.; Tighe, S.L. A non-destructive approach for the predictive master curve of ASPHALT pavements using ultrasonic and deflection methods. Int. J. Pavement Eng. 2022, 23, 1540–1551. [Google Scholar] [CrossRef]
- Ma, X.; Dong, Z.; Dong, Y. Toward asphalt pavement health monitoring with built-in sensors: A novel application to real-time modulus evaluation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22040–22052. [Google Scholar] [CrossRef]
- Liu, Z.; Gu, X.; Wu, C.; Ren, H.; Zhou, Z.; Tang, S. Studies on the validity of strain sensors for pavement monitoring: A case study for a fiber Bragg grating sensor and resistive sensor. Constr. Build. Mater. 2022, 321, 126085. [Google Scholar] [CrossRef]
- Benedetto, A. A three dimensional approach for tracking cracks in bridges using GPR. J. Appl. Geophys. 2013, 97, 37–44. [Google Scholar] [CrossRef]
- Luburić, I.; Perić, Z.; Šesnić, S. Electromagnetic modeling of the GPR response to the pipe system set in the concrete slab. In Proceedings of the 2017 25th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 21–23 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- du Tertre, A.; Kırlangıç, A.S.; Cascante, G.; Tighe, S.L. Ultrasonic inspection of asphalt pavements to assess longitudinal joints. Road Mater. Pavement Des. 2022, 23, 129–148. [Google Scholar] [CrossRef]
- Pan, W.-H.; Sun, X.-D.; Wu, L.-M.; Yang, K.-K.; Tang, N. Damage detection of asphalt concrete using piezo-ultrasonic wave technology. Materials 2019, 12, 443. [Google Scholar] [CrossRef] [PubMed]
- Carrión, A.; Genovés, V.; Gosálbez, J.; Miralles, R.; Payá, J. Ultrasonic signal modality: A novel approach for concrete damage evaluation. Cem. Concr. Res. 2017, 101, 25–32. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Sebaaly, P.E.; Wambold, J.C. New and Old Technology Available for Pavement Management System to Determine Pavement Condition; ASTM International: West Conshohocken, PA, USA, 1991. [Google Scholar] [CrossRef]
- Salles, L.; Balbo, J.T.; Khazanovich, L. Non-destructive ultrasonic tomography for concrete pavement evaluation: Signal processing and image analysis of crucial parameters. Rev. IBRACON De Estrut. E Mater. 2017, 10, 1182–1191. [Google Scholar] [CrossRef]
- Lydon, M.; Taylor, S.E.; Robinson, D.; Callender, P.; Doherty, C.; Grattan, S.K.; O’Brien, E.J. Development of a bridge weigh-in-motion sensor: Performance comparison using fiber optic and electric resistance strain sensor systems. IEEE Sens. J. 2014, 14, 4284–4296. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, C.; Wang, X.; Zheng, Y. Pavement condition monitoring system at shanghai pudong international airport. In Proceedings of the Geo-Shanghai 2014 International Conference, Shanghai, China, 26–28 May 2014; pp. 283–295. [Google Scholar] [CrossRef]
- Lajnef, N.; Chatti, K.; Chakrabartty, S.; Rhimi, M.; Sarkar, P. Smart Pavement Monitoring System; Federal Highway Administration: McLean, VA, USA, 2013.
- Kim, Y.R.; Seo, Y.; King, M.; Momen, M. Dynamic modulus testing of asphalt concrete in indirect tension mode. Transp. Res. Rec. 2004, 1891, 163–173. [Google Scholar] [CrossRef]
- Du, G.; Li, Z.; Song, G. A PVDF-based sensor for internal stress monitoring of a concrete-filled steel tubular (CFST) column subject to impact loads. Sensors 2018, 18, 1682. [Google Scholar] [CrossRef] [PubMed]
- Shen, J.; Geng, M.; Schultz, A.; Chen, W.; Qiu, H.; Wang, X. Numerical Study of a Multi-Layered Strain Sensor for Structural Health Monitoring of Asphalt Pavement. Multidiscip. Digit. Publ. Inst. Proc. 2019, 42, 41. [Google Scholar] [CrossRef]
- Bekiroglu, K.; Tekeoglu, A.; Shen, J.; Boz, I. Low-Cost Internet of Things Based Real-Time Pavement Monitoring System. In Proceedings of the 2021 IEEE International Conferences on Internet of Things (iThings) and IEEE Green Computing & Communications (GreenCom) and IEEE Cyber, Physical & Social Computing (CPSCom) and IEEE Smart Data (SmartData) and IEEE Congress on Cybermatics (Cybermatics), Melbourne, Australia, 6–8 December 2021; pp. 17–22. [Google Scholar] [CrossRef]
- Nowak, A.S.; Laman, J.A.; Nassif, H. Effect of Truck Loading on Bridges; Michigan Department of Transportation: Lansing, MI, USA, 1994.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density (kg/m3) | Young’s Modulus (GPa) | Poisson’s Ratio |
|---|---|---|---|
| Asphalt concrete | 2402.77 | 12 | 0.3 |
| Polyurethane foam | 50 | 0.151 | 0.37 |
| Araldite GY-6010 epoxy resin | 2700 | 2.067 | 0.37 |
| Piezoelectric sensor | 1780 | 2 | 0.39 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Bekiroglu, K.; Tekeoglu, A.; Boz, I.; Chen, W.; Geng, M. Numerical Study of a PVDF-Based Strain Sensor for Damage Detection of an Asphalt Concrete Pavement Subject to Dynamic Loads. Eng. Proc. 2022, 27, 31. https://doi.org/10.3390/ecsa-9-13318
Shen J, Bekiroglu K, Tekeoglu A, Boz I, Chen W, Geng M. Numerical Study of a PVDF-Based Strain Sensor for Damage Detection of an Asphalt Concrete Pavement Subject to Dynamic Loads. Engineering Proceedings. 2022; 27(1):31. https://doi.org/10.3390/ecsa-9-13318
Chicago/Turabian StyleShen, Jiayue, Korkut Bekiroglu, Ali Tekeoglu, Ilker Boz, Weiru Chen, and Minghao Geng. 2022. "Numerical Study of a PVDF-Based Strain Sensor for Damage Detection of an Asphalt Concrete Pavement Subject to Dynamic Loads" Engineering Proceedings 27, no. 1: 31. https://doi.org/10.3390/ecsa-9-13318
APA StyleShen, J., Bekiroglu, K., Tekeoglu, A., Boz, I., Chen, W., & Geng, M. (2022). Numerical Study of a PVDF-Based Strain Sensor for Damage Detection of an Asphalt Concrete Pavement Subject to Dynamic Loads. Engineering Proceedings, 27(1), 31. https://doi.org/10.3390/ecsa-9-13318