1. Introduction
Haptic feedback gloves are wearable devices that provide a touch response to simulate tactile sensations of virtual objects [
1]. Some methods employed to produce the haptics include force, vibrotactile, and thermal feedback—these are often very bulky or expensive to manufacture and limit the level of hand movements and natural feeling for the user. This research attempts an electro-tactile approach using TENS [
2] due to the simplicity of the circuit required to achieve its signals, making it a suitable choice for an e-textile. The gloves aim to improve user interaction with VR/AR environments while also maintaining flexibility and breathability [
3]. This study demonstrates the glove’s functionalities through its interaction with a Graphical User Interface (GUI) via Bluetooth Low Energy (BLE).
2. Haptic Feedback Glove Control and System Design
The glove prototype consists of six IMUs (MPU6050—6 axes gyro + accelerometer) and six haptics channels, both located at the centre of the palm and on each fingertip. An additional electrode—the common ground of all channels—is located on the edge of the glove.
The IMUs communicate via the I2C protocol, but each IC has the same address, so the data line is controlled via a multiplexer (SN74LV4051A). A microcontroller sends data from each IMU to the GUI and controls the haptic stimulation when contact points in the GUI change.
TENS Circuitry
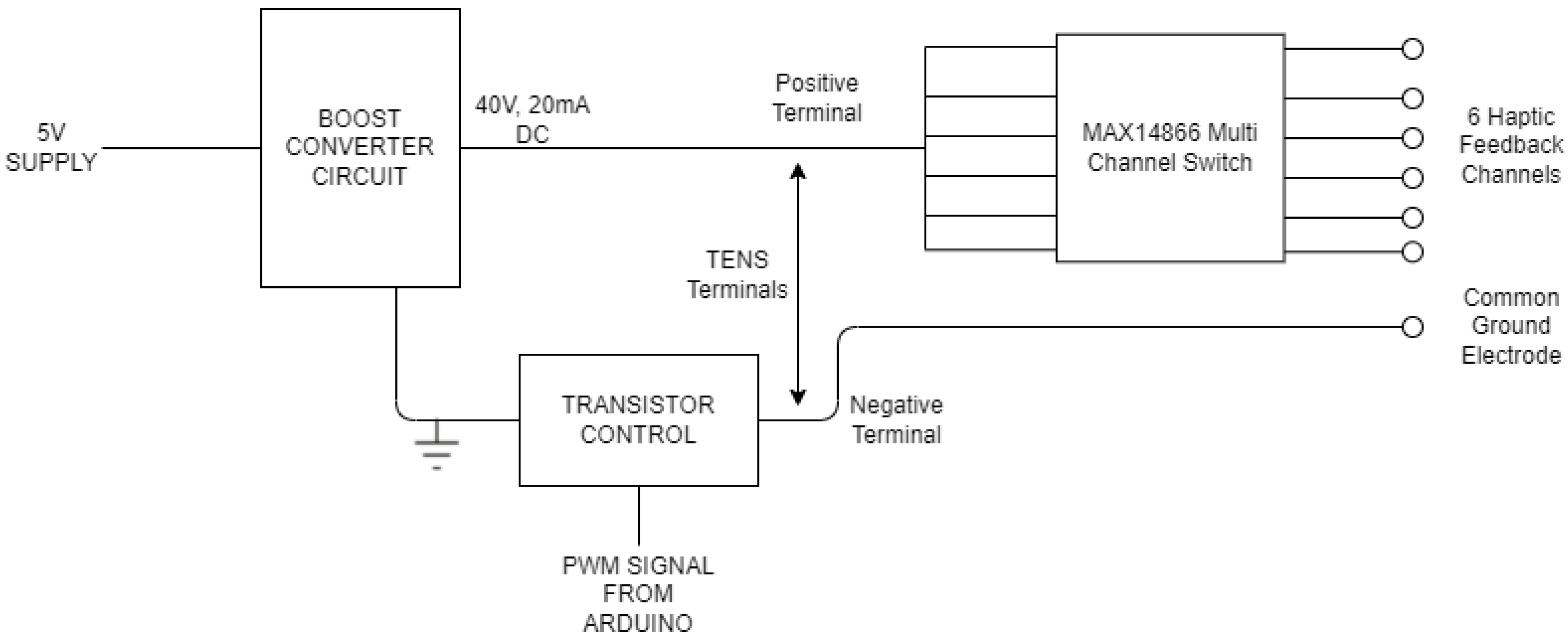
The TENS unit provides a tingling sensation to the user’s skin at areas in contact with its electrodes by transmitting high-voltage electrical pulses. The circuit mainly consists of a boost converter (LT3467), a transistor (BC846BM3T5G) and a multi-channel high voltage analogue switch (MAX14866), as shown in
Figure 1. This simplistic design minimises the overall circuit size.
First, the boost converter generates a 40 V, 20 mA DC signal from a 5 V output of the microcontroller. A transistor is then connected between the ground and the negative terminal of the TENS output, while the 40 V output forms the stimulator’s positive terminal. When the switching transistor is on, the negative terminal of the stimulator is grounded, giving rise to a 40 V potential between the two terminals. In contrast, zero potential exists between the terminals when the transistor is off. Therefore, the transistor is controlled by a PWM signal from the microcontroller to shape and generate the electrical pulses of the stimulator.
The negative terminal of the stimulator is connected to the common ground electrode, whereas the positive terminal is further connected to one end of each channel of the high-voltage, multi-channel analogue switch, allowing six independent haptic feedback channels.
The full 5 V to 40 V boost converter circuit diagram can be found in the LT3467 datasheet; the final strip circuit design layouts can be seen in
Section 3.2.
3. E-Textile Fabrication
The IMU, TENS and control circuits are embedded into the glove via flexible ‘strip circuits’—these are flexible circuits orientated in a strip form to aid integration into the textile [
4]. Each strip design contains pads to solder copper Litz wires (embroidered on the glove), enabling connections with other circuits [
5]. The IMU circuits are located on the fingers and the back of the hand; all other circuits are located on an extended wrist fabric attached to the glove.
3.1. Fabrication of Screen-Printed TENS Electrodes
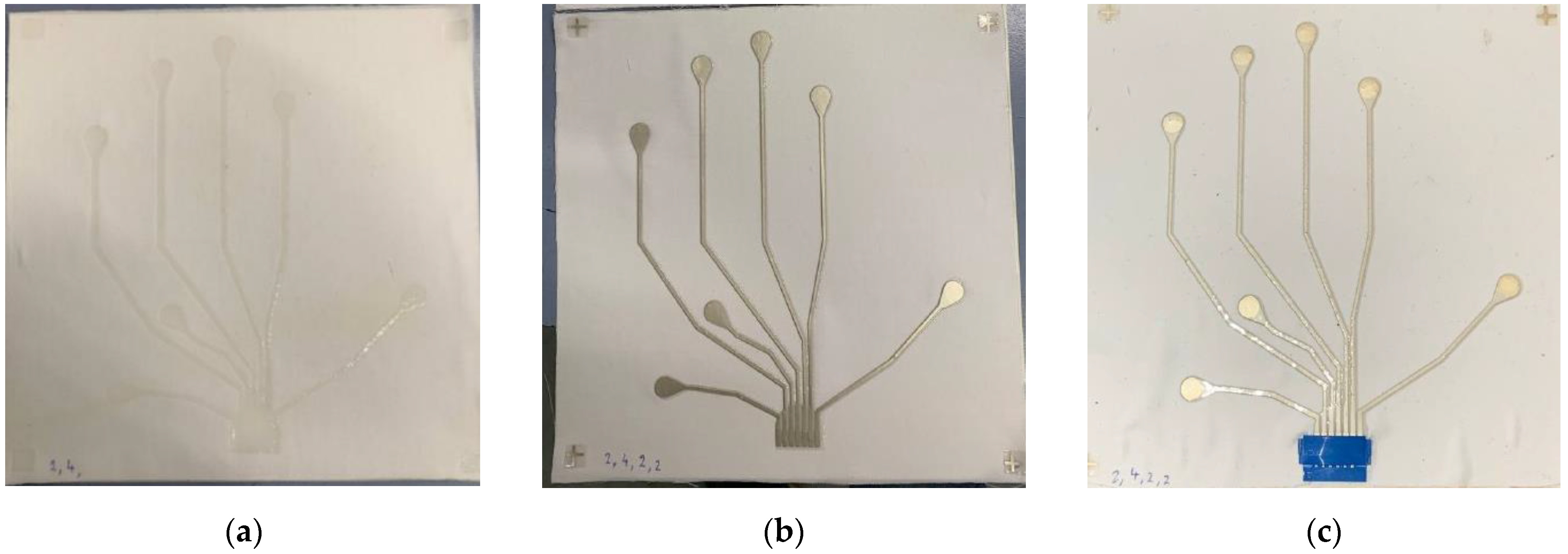
Figure 2 shows the screen-printed electrode tracks on a polyester cotton fabric (Whaley’s, Bradford, UK—OpticWhite Polyester/Cotton). These tracks are screen-printed to connect to the TENS to ensure the fabric in contact with the user’s hand is continuous and flexible without impeding hand movement. The conductive silver ink tracks are printed between a ‘primer’, used to smooth the fabric where printed, and an ‘encapsulation’ coating, both of which use the same ink (Smart Fabric Inks Ltd., Southampton, UK—Fabinks UV-IF1004) [
6]. The ‘primer’ consists of four printed layers providing a smooth base for the silver ink. The ‘encapsulation’ consists of two layers to electrically insulate the tracks from the user’s skin and increase their durability.
The conductive track is exposed at each end to allow contact. Hydrogel pads are attached to the rounded ends of each track to stimulate the fingertips and back of the hand. A crimped connector connects the printed tracks to the electrical stimulator.
3.2. Fabrication of Flexible Strip Circuits
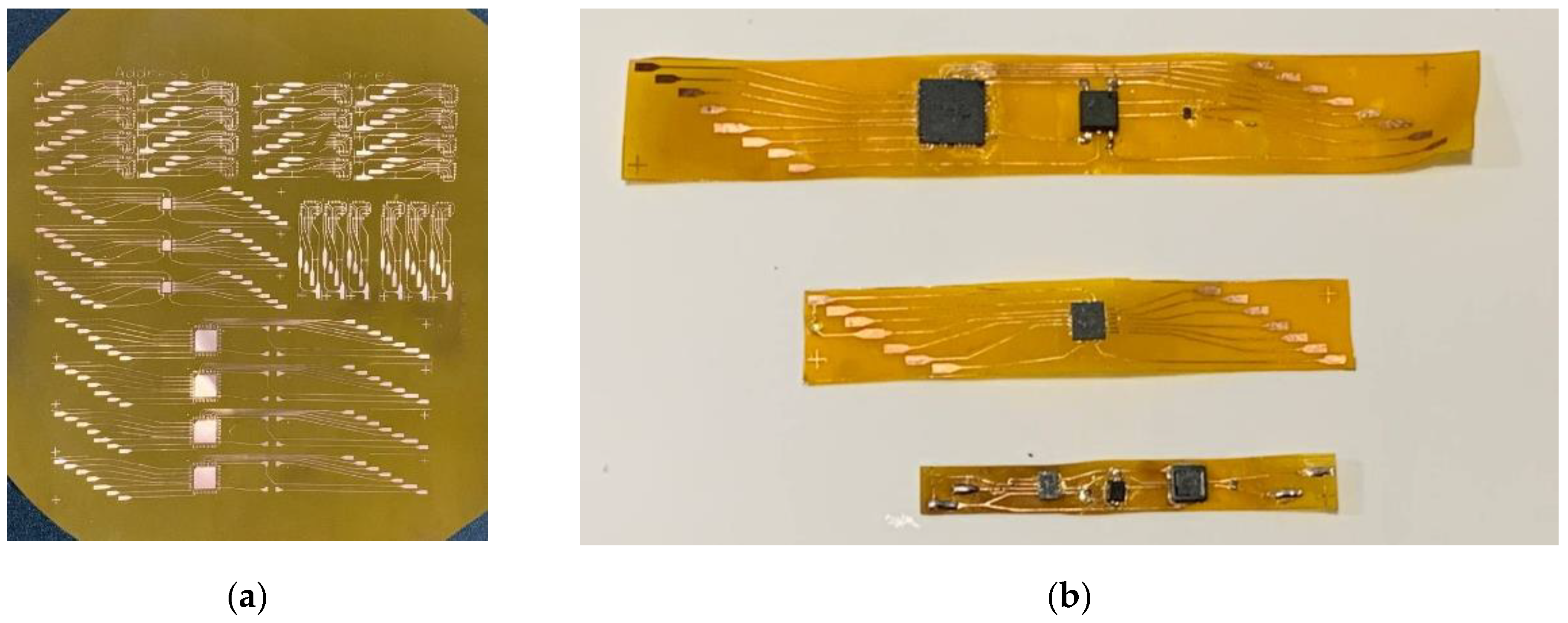
The strip circuits are fabricated from copper laminated polyimide (Kapton) film (GTS Flexible Materials Ltd., Ebbw Vale, UK) due to its flexibility and thinness (25 µm), reducing its noticeability when integrated with the glove.
The conductive tracks are etched from the copper using a photolithography process developed previously at the University of Southampton [
4] based on standard PCB processes. The strips were then cut out for component soldering.
Figure 3 shows examples of the circuit wafer and strip circuit. With single-layer copper, strip circuit designs are limited with no vias, creating significant design constraints. Hence, each strip design is simple, using embroidered wires for external connections. This e-textile fabrication technique allows for complex circuits to therefore be distributed around the garment, connecting to create more complex systems.
4. Finished E-Textile Haptic Feedback Glove Prototype
The finished glove prototype is shown in
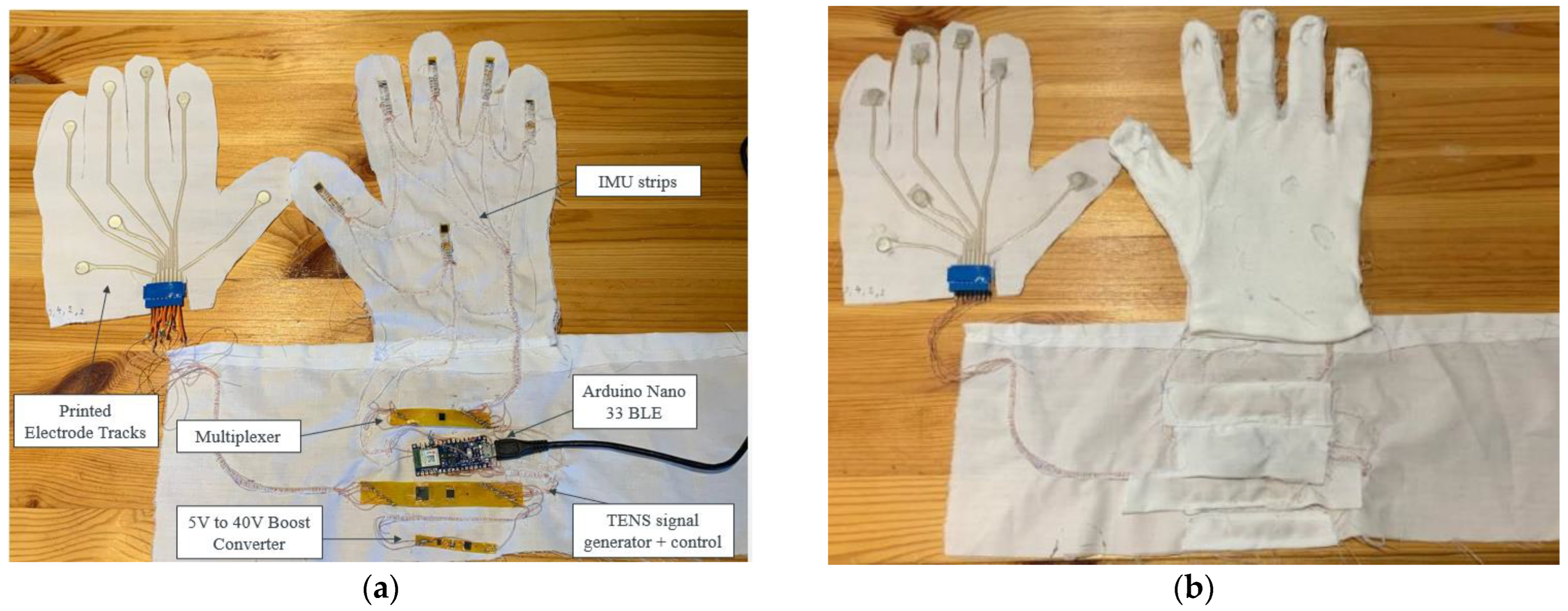
Figure 4. The wrist extension attached to the glove contains an Arduino Nano 33 BLE, the TENS circuitries and a multiplexer connected to the IMUs. The IMU strip size is 24 × 5.7 mm; hence, they were easily embroidered onto the glove and can be fitted on each fingertip. All other strips are secured to the wrist with pockets stitched over them. A cotton glove is also stitched over the fabric of the IMU strips to be worn by the user. For this prototype, to make it easier to test, the electrodes were printed on the fabric separately to ensure that if one part failed, the entire e-textile was not lost. However, for future mass manufacturing, all of these parts could be combined.
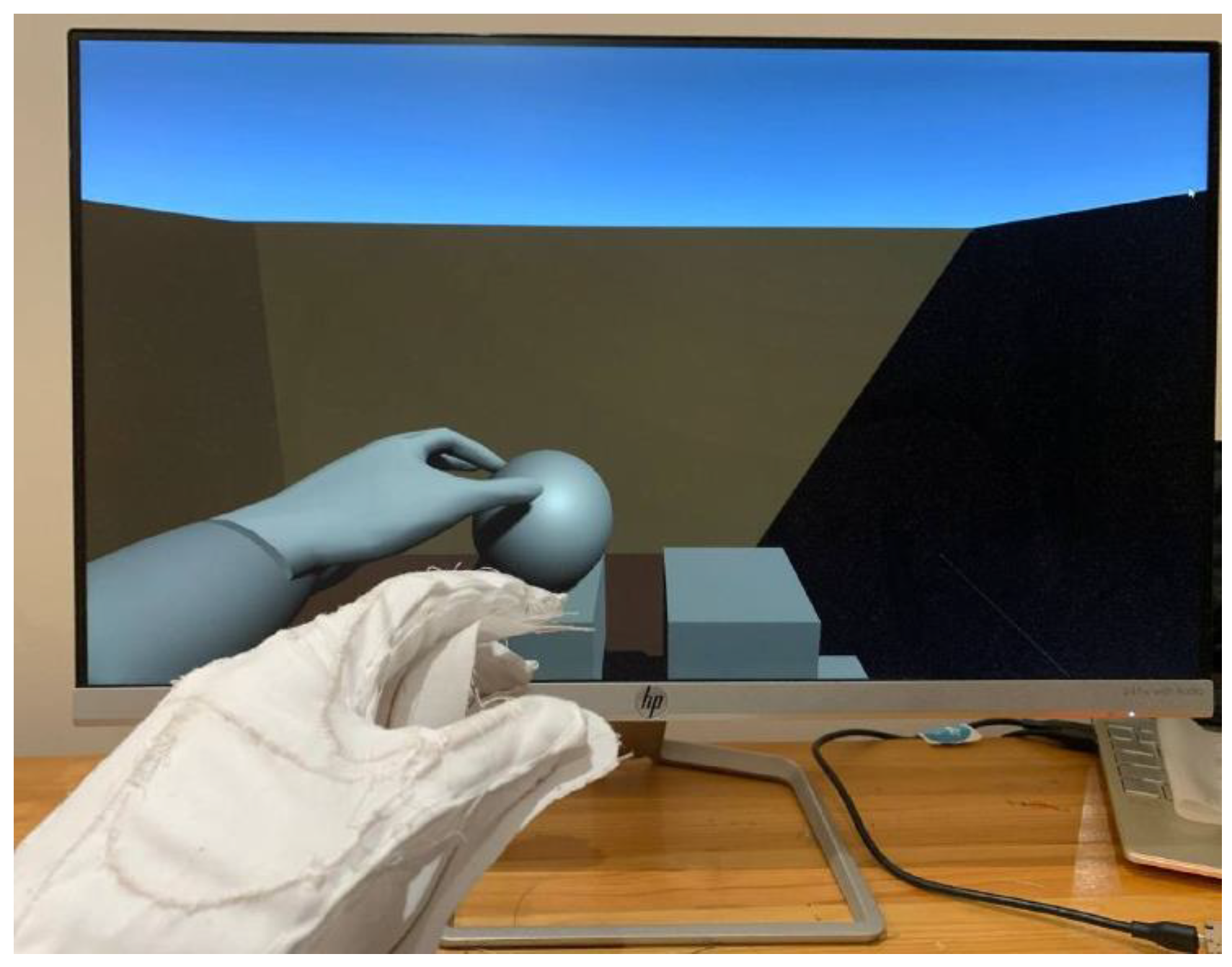
Figure 5 shows the functionalities of the glove. In this example, haptic feedback was provided to the wearer at the thumb and index finger channels as they are in contact with the sphere. The user’s hand movements are tracked, and the haptic feedback is updated every frame to reflect events occurring in the GUI in real time.
5. Conclusions
This paper demonstrates the development of simple and comfortable e-textile haptic feedback gloves using TENS. The technologies of screen printing and flexible strip circuits are integrated into the design, using embroidered wires to make any necessary connections. The strip circuits ensure small but robust e-textile circuitry while implementing screen-printed electrode tracks provides additional dexterity and comfort. Currently, the prototype can track wrist and finger movements and provide haptics at six channels, but these can be improved with additional IMUs and electrodes.
Future developments include reducing the size of ICs used to further reduce the overall circuit and replacing the electrodes with carbon electrodes printed directly on the glove along with their tracks. Additionally, multiple haptics patterns can be implemented by varying the stimulator pulse width and frequency to allow for different touch sensations.
Author Contributions
These authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the EU H2020 programme, grant number WEARPLEX—825339—
wearplex.soton.ac.uk (accessed on 3 March 2022).
Institutional Review Board Statement
This study was conducted according to the guidelines of the Declaration of Helsinki and approved by the Ethics Committee of the University of Southampton (ERGO/FPSE/65891—approved 30 June 2021).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study and their permission to publish this paper.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Perret, J.; Benjamin, E. Touching Virtual Reality: A Review of Haptic Gloves. In Proceedings of the ACTUATOR 18, Bremen, Germany, 25–27 June 2018. [Google Scholar]
- Kruijff, E.; Schmalstieg, D.; Beckhaus, S. Using neuromuscular electrical stimulation for pseudo-haptic feedback. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology (VRST), Limassol, Cyprus, 1–3 November 2006. [Google Scholar]
- Carlton, B. Smart Fabric Technology Brings Touch Haptics To The Oculus Quest. VR Scout, 27 October 2019. Available online: http://vrscout.com/news/smart-fabric-haptic-touch-oculus-quest/ (accessed on 25 June 2021).
- Komolafe, A.; Torah, R.; Wei, Y.; Nunes-Matos, H.; Li, M.; Hardy, D.; Dias, T.; Tudor, M.; Beeby, S. Integrating flexible filament circuits for E-textile applications. Adv. Mater. Technol. 2019, 4, 1900176. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Torah, R.; Nunes-Matos, H.; Wei, Y.; Beeby, S.; Tudor, J.; Yang, K. Integration and Testing of a Three-Axis Accelerometer in a Woven E-Textile Sleeve for Wearable Movement Monitoring. Sensors 2020, 20, 5033. [Google Scholar] [CrossRef] [PubMed]
- Court, D.; Torah, R. Development of a Printed E-Textile for the Measurement of Muscle Activation via EMG for the Purpose of Gesture Control. In Proceedings of the International Conference on the Challenges, Opportunities, Innovations and Applications in E-Textiles (E-Textiles 2020), Online, 4 November 2020. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




