
Comparative Study of SLAM Techniques for UAV †

Abstract
:1. Introduction
2. Materials and Methods:
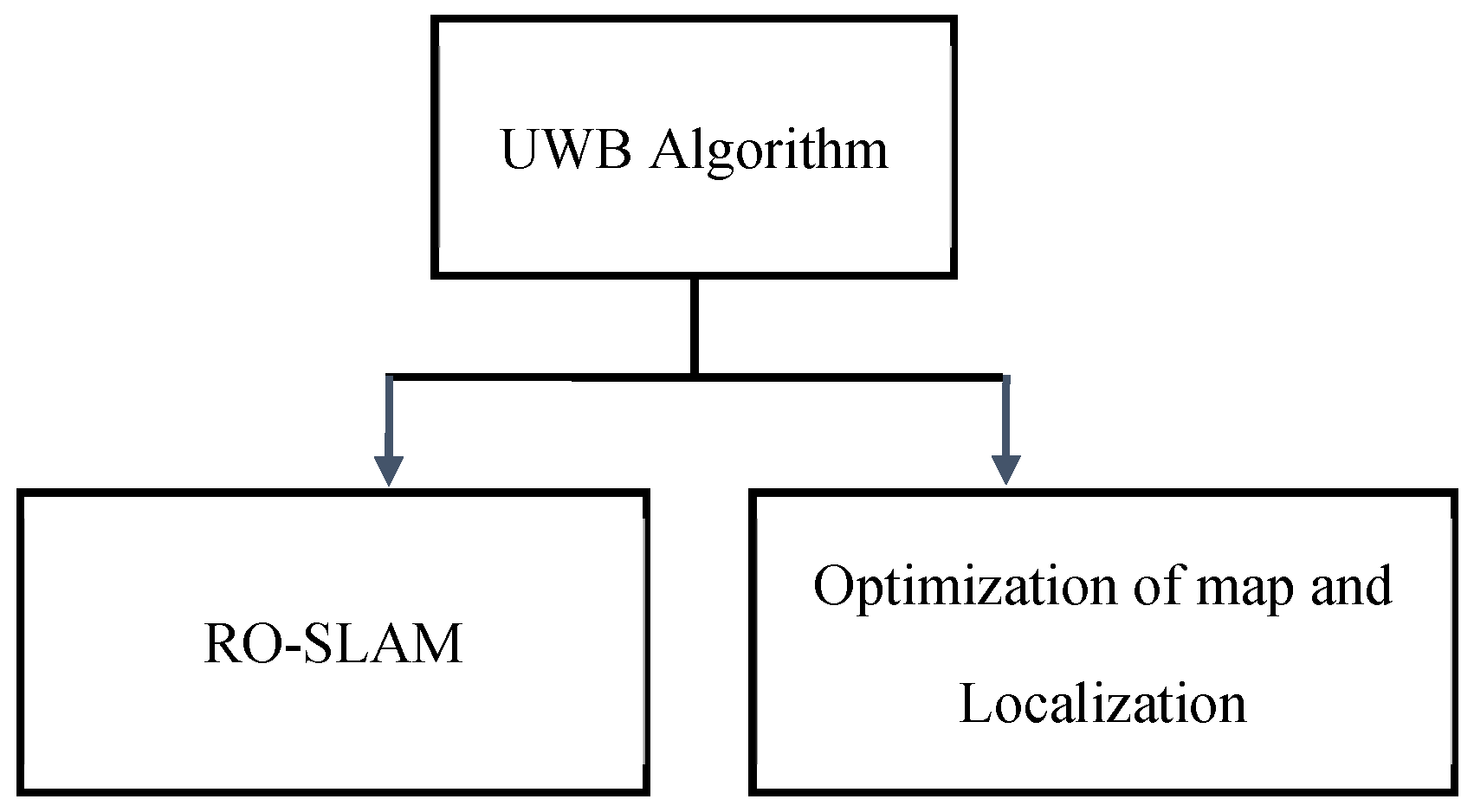
- (A)
- Ultra-wideband based Algorithm Approach:
- (B)
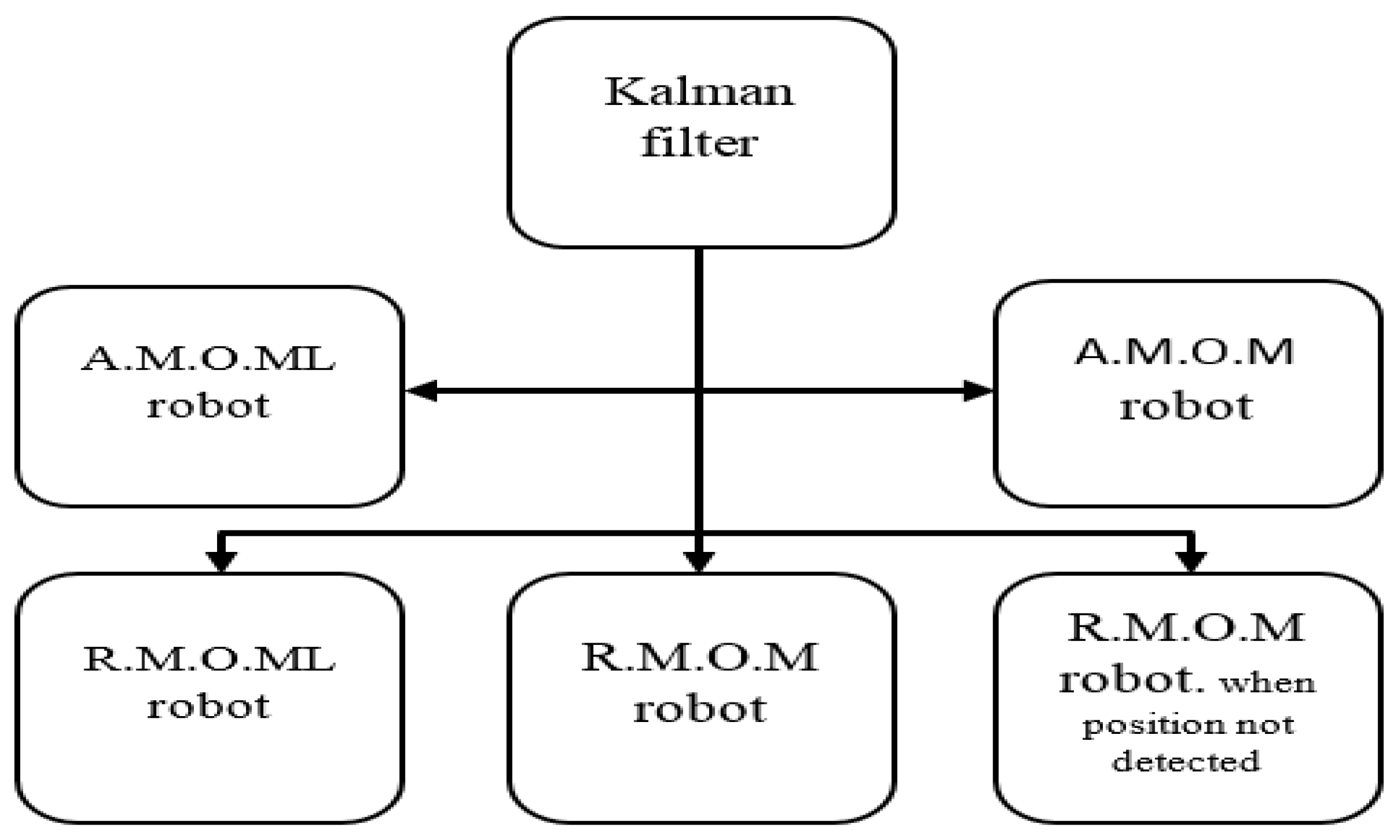
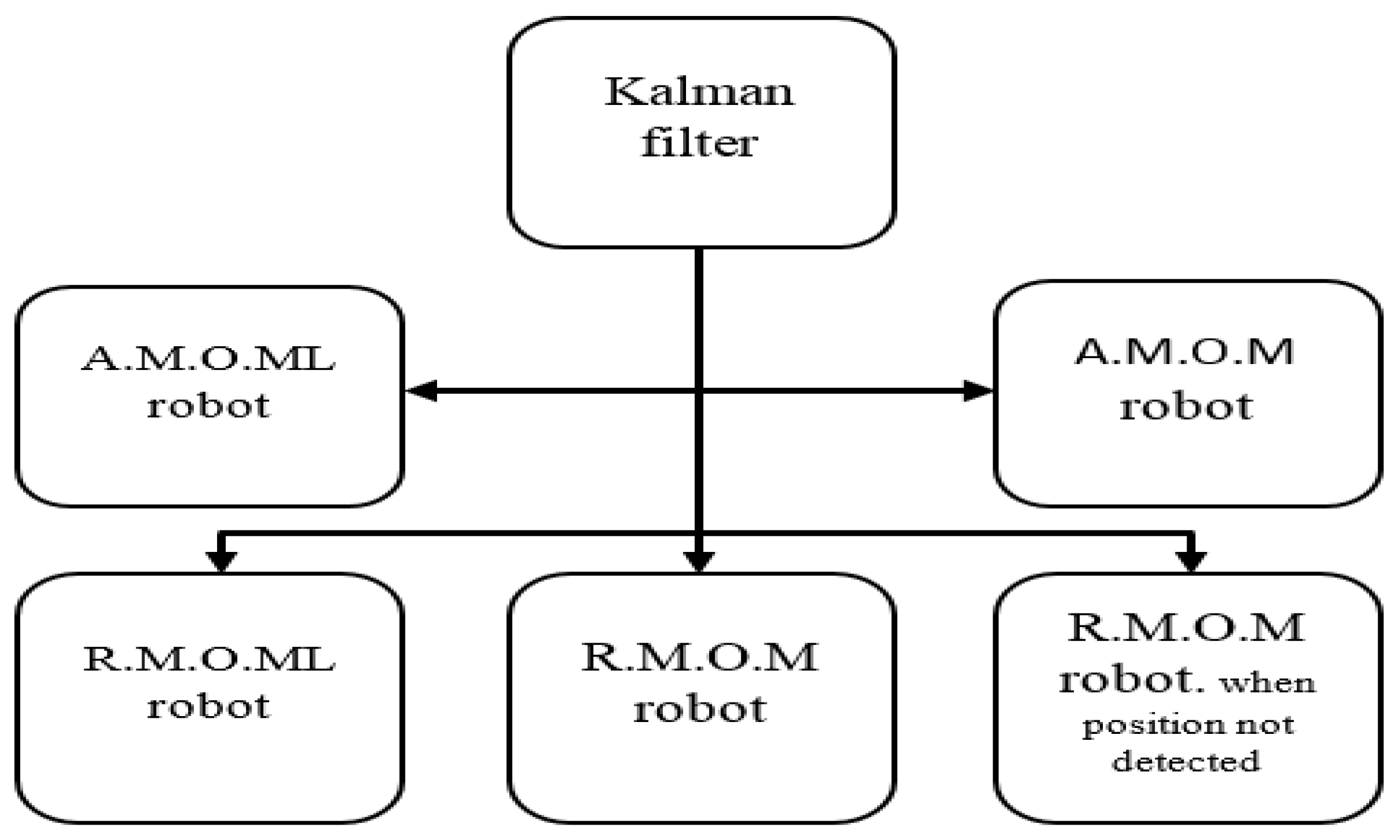
- Kalman Filter (KF) based Approach:
- Absolute measurement of motionless robot (A.M.O.ML).
- Absolute measurement of moving robot (A.M.O.M).
- Relative measurement of motionless robot (R.M.O.ML).
- Relative measurement of moving robot (R.M.O.M).
- Relative measurement of moving robot while position of robot not detected.
- (C)
- Extended Kalman Filter Based Approach:
3. Discussion
4. Conclusions
Conflicts of Interest
References
- Sukkarieh, S.; George, M. Tightly coupled INS/GPS with bias estimation for UAV applications. In Proceedings of the Australiasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 5–7 December 2005. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005; p. 163. [Google Scholar]
- Kumar, V.; Michael, N. Opportunities and challenges with autonomous micro aerial vehicles. Int. J. Robot. Res. 2012, 31, 1279–1291. [Google Scholar] [CrossRef]
- Grzonka, S.; Grisetti, G.; Burgard, W. A fully autonomous indoor quadrotor. IEEE Trans. Robot. 2012, 28, 90–100. [Google Scholar] [CrossRef] [Green Version]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present,168 and future of simultaneous localization and mapping: Towardtherobust-perceptionage. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Irshad, M.J.; Shi, H.; Xu, W. Passive source localization using compressive sensing. Sensors 2019, 19, 4522. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ali, U.; Muhammad, W.; Irshad, M.J.; Manzoor, S. Multi-sensor fusion for underwater robot self-localization using PC/BC-DIM neural network. Sens. Rev. 2021; ahead-of-print. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Symbiotic navigation in multi-robot systems with171 remote obstacle knowledge sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fabresse, F.R.; Caballero, F.; Maza, I.; Ollero, A. Undelayed 3d RO-SLAM based on gaussian-mixture and reduced spherical parametrization. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 1555–1561. [Google Scholar]
- Fabresse, F.; Caballero, F.; Merino, L.; Ollero, A. Active perception for 3D Range-only Simultaneous Localization and Mapping with UAVs. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1–6. [Google Scholar]
- Gonz’alez, J.; Blanco, J.-L.; Galindo, C.; Ortiz-de-Galisteo, A.; Fernandez-Madrigal, J.-A.; Moreno, F.A.; Mart’ınez, J.L. Mobile robot localization based on ultra-wide-band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [CrossRef]
- Demim, F.; Nemra, A.; Louadj, K.; Mehal, Z.; Hamerlain, M.; Bazoula, A. Simultaneous localization and mapping algorithm for unmanned Ground vehicle with SVSF filter. In Proceedings of the 2016 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016; pp. 155–162. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Scheme | Approaches | Pros | Cons |
|---|---|---|---|
| 1 | UWB Based |
|
|
| 2 | KF Based |
|
|
| 3 | EKF Based |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rauf, A.; Irshad, M.J.; Wasif, M.; Rasheed, S.U.; Aziz, N.; Taj, H. Comparative Study of SLAM Techniques for UAV. Eng. Proc. 2021, 12, 67. https://doi.org/10.3390/engproc2021012067
Rauf A, Irshad MJ, Wasif M, Rasheed SU, Aziz N, Taj H. Comparative Study of SLAM Techniques for UAV. Engineering Proceedings. 2021; 12(1):67. https://doi.org/10.3390/engproc2021012067
Chicago/Turabian StyleRauf, Abdul, Muhammad Jehanzeb Irshad, Muhammad Wasif, Syed Umar Rasheed, Nouman Aziz, and Hamza Taj. 2021. "Comparative Study of SLAM Techniques for UAV" Engineering Proceedings 12, no. 1: 67. https://doi.org/10.3390/engproc2021012067
APA StyleRauf, A., Irshad, M. J., Wasif, M., Rasheed, S. U., Aziz, N., & Taj, H. (2021). Comparative Study of SLAM Techniques for UAV. Engineering Proceedings, 12(1), 67. https://doi.org/10.3390/engproc2021012067