Abstract
In outdoor environments, GNSS is commonly used for vehicle navigation and various location-based ITS services. However, in GNSS shadow roads such as tunnels and underground highways, it is challenging to provide these services. With the rapid expansion of GNSS shadow roads, the need for radio positioning technology that can serve the role of GNSS in these areas has become increasingly important to provide accurate vehicle navigation and various location-based ITS services. This paper proposes a new GNSS shadow road radio positioning technology using multidirectional BLE beacon signals. The structure of a multidirectional BLE beacon that radiates different BLE beacon signals in two or four directions is introduced, and explains the principle of differential RSSI technology to determine the vehicle’s location using these signals. Additionally, the technology used to determine the vehicle’s speed is described. A testbed was constructed to verify the performance of the developed multidirectional BLE beacon-based radio navigation system. The current status and future plans of the testbed installation are introduced, and the results of position and speed experiments using the testbed for constant speed and deceleration driving are presented.
1. Introduction
In outdoor environments, GNSS (Global Navigation Satellite System) is commonly used to provide various location-based ITS (Intelligent Transportation System) services such as vehicle navigation to guide driving routes to destinations, detection and warning of unexpected situations ahead, and guidance at entry and exit points, as well as precise navigation services for autonomous vehicles [1]. However, in GNSS shadow roads such as tunnels and underground highways, it is difficult to provide these services due to the inability to obtain accurate location information. Particularly in the case of GNSS shadow roads, additional services such as location-based evacuation route guidance are of significant importance due to the high fatality rate in the event of an accident on those roads. Moreover, with the rapid expansion of tunnel road construction and the construction plans for underground highways in Korea, the need for radio positioning technology in GNSS shadow roads has become increasingly important to provide accurate vehicle navigation and various location-based ITS services.
WiFi, Cellular, BLE (Bluetooth Low Energy), and GNSS repeater technologies for radio positioning in shadow roads do not meet the accuracy requirements for vehicle navigation, and INSs (Inertial Navigation Systems) using an IMU (Inertial Measurement Unit) or odometer have the problem of cumulative errors. Radio positioning systems using GNSS pseudo-lite or special RF signals are difficult to use with smartphones or existing navigation systems, making it challenging to expand positioning services [2].
To solve these issues, a new GNSS shadow road radio positioning technology named CLOBER (Cross-shape LOcation BEacon Radio) using MD (multidirectional) BLE beacon signals has been proposed [3,4]. By radiating BLE beacon channel signals with different IDs in two or four directions, it can solve the problems of interference between beacon signals and the channel model issues in RSS (relative signal strength) of existing BLE positioning technologies. A positioning system using this BLE CLOBER has been developed and commercialized as an indoor parking lot vehicle navigation and parking route guidance system [5].
This paper proposes a technology to determine the position and speed of vehicles moving at high speed in tunnels and underground highways using DRSS (differential RSS) obtained by differencing signals radiated from MD BLE beacons. The developed BLE CLOBER-based radio positioning technology provides an accuracy of 1–3 m comparable to GNSS accuracy at both low and high speeds, and since it uses BLE signals, it can be directly applied to smartphones and vehicle navigators, making it advantageous for service expansion.
2. MD BLE Beacon-Based Radio Navigation
2.1. BLE CLOBER-Based Radio Navigation
In previous studies, positioning technologies using WiFi, Cellular, BLE, GNSS repeater, and GNSS pseudo-lite, as well as radio positioning using special RF signals such as UWB (ultra-wideband), and indoor positioning using DR (dead reckoning) have been proposed [2]. The positioning technology using WiFi and Cellular has low positioning accuracy, and the BLE positioning technology is significantly affected by interference or distance errors due to the channel environment of the propagation paths of multiple beacon signals. GNSS repeater is affected by the location of the GNSS receiver installed outside, and GNSS pseudo-lite has problems with multipath and difficulty in receiving signals on smartphones, etc. UWB positioning has high positioning accuracy, but requires separate terminals, and DR navigation technology has the problem of cumulative errors in IMU and odometer sensors, causing continuous increases in position and direction errors.
To solve these problems, the BLE CLOBER positioning technology, which radiates BLE beacon signals with different IDs in two or four directions using multidirectional antennas, has been proposed [3,4]. Figure 1 shows the signal radiation pattern of the BLE CLOBER equipped with two or four directional antennas. In the figure, each antenna radiates BLE beacon signals with different IDs and radiates signals in a time-division scheme to minimize interference. Since the signals reaching the vehicle from each antenna have very similar propagation paths, it solves the channel environment problem that causes position errors in existing BLE positioning.
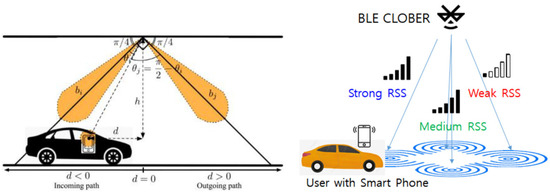
Figure 1.
BLE CLOBER equipped with two or four directional antennas.
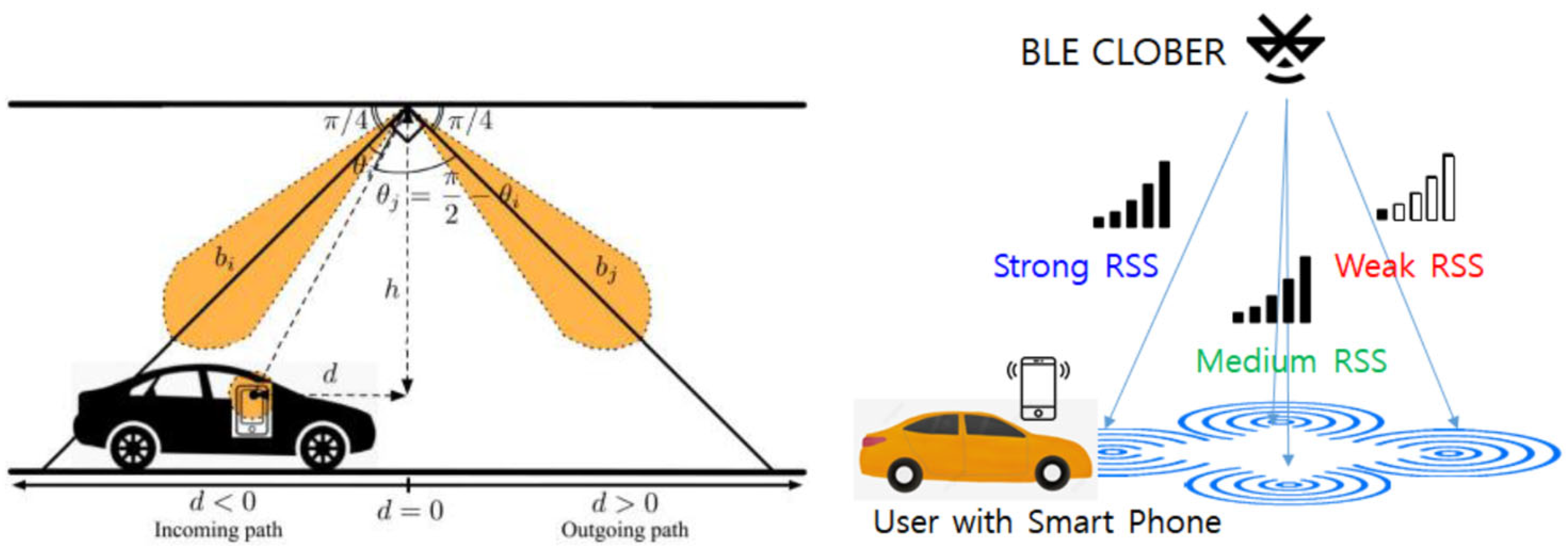
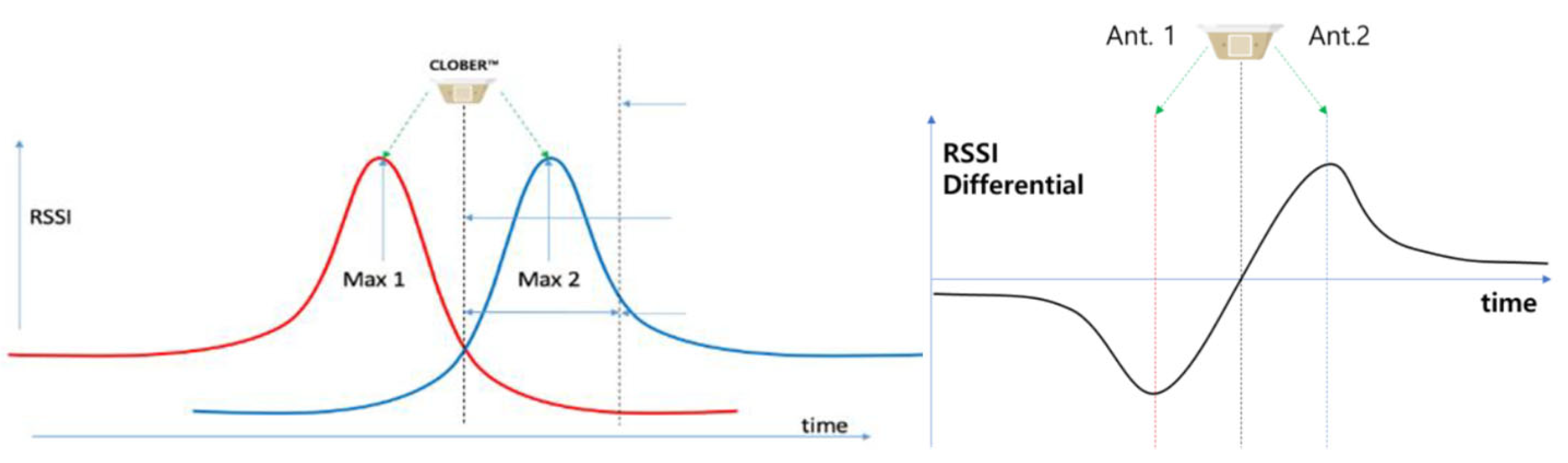
This paper proposes a technology to determine the position and speed of vehicles moving at high speeds in tunnels and underground highways using DRSS (differential RSSI) obtained by differentiating the RSS (Received Signal Strength) of signals radiated from MD BLE beacons. A vehicle passing through BLE CLOBER equipped with two directional antennas, as shown in Figure 1, has an RSS signal reception profile as shown in Figure 2, and DRSS can be obtained by differencing these signals. Since the position and antenna radiation direction of BLE CLOBER are known and stored in the navigation map, the vehicle position can be estimated using DRSS. In addition, the vehicle speed can be estimated using both the slope of the DRSS and the time taken to pass through two adjacent BLE CLOBERs.
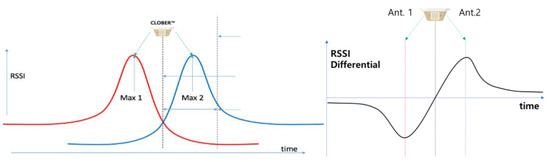
Figure 2.
Received RSS profile from two-directional antennas (red from left direction and blue from right) and their DRSS profile.
2.2. BLE CLOBER Testbed Construction Status and Future Plans
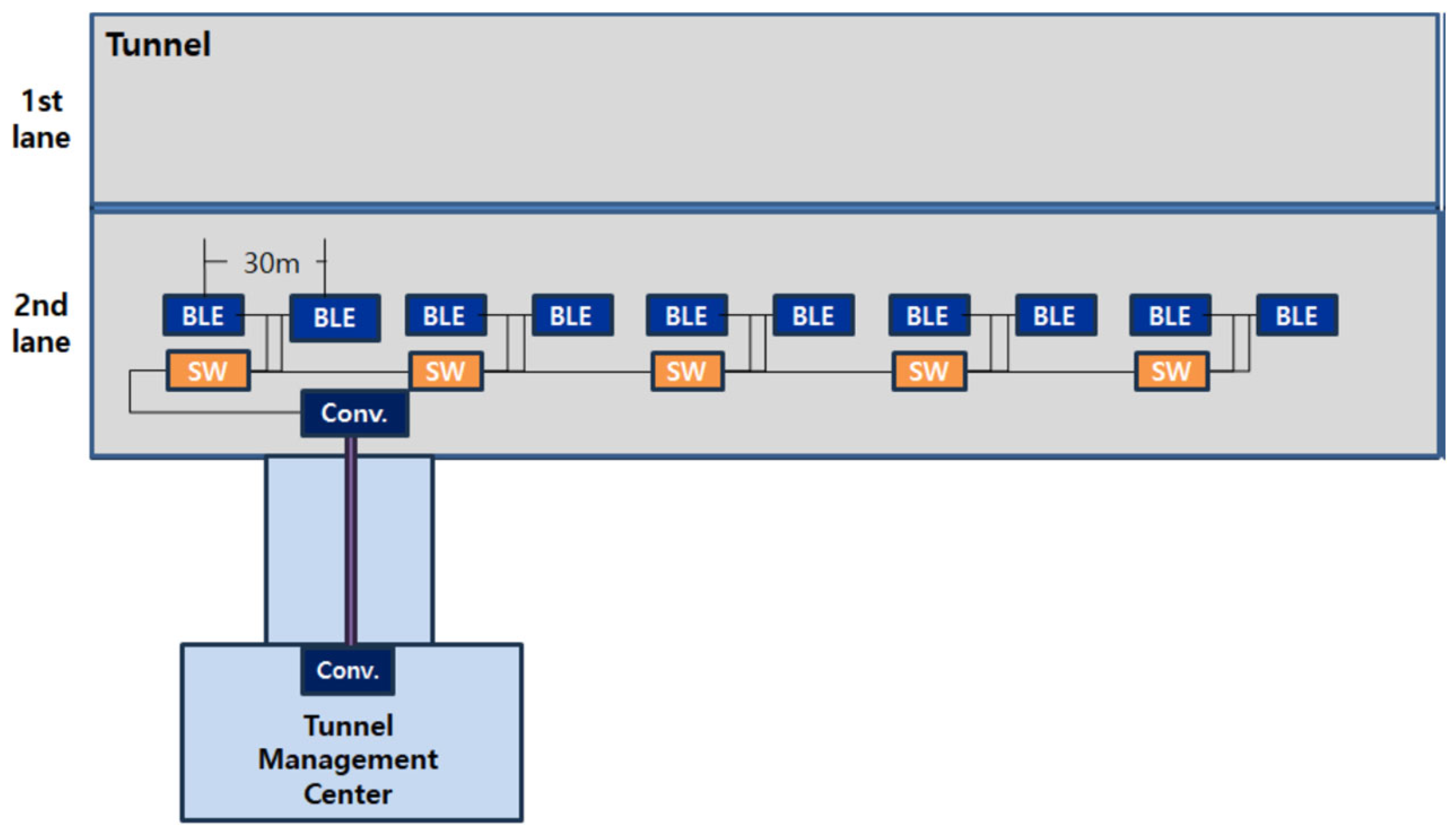
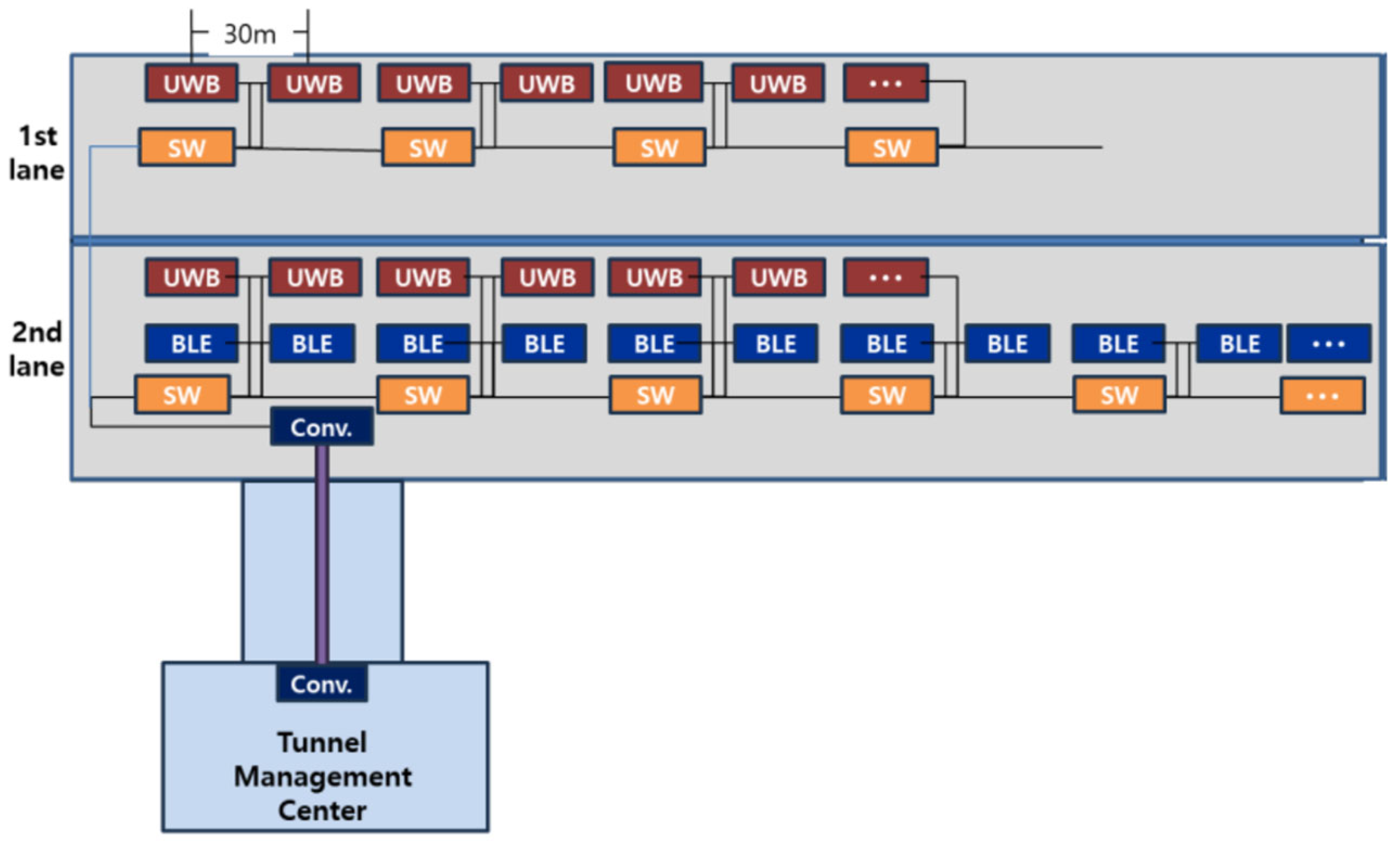
To verify the high-speed performance of the BLE CLOBER positioning technology, outdoor experiments were conducted at the proving ground, and the position performance of 1–3 m, depending on the speed, was confirmed compared to the RTK position. Based on these experimental results, a testbed was constructed in the Gise tunnel located in the Daegu Technopolis area to verify the feasibility of BLE CLOBER, as shown in Figure 3. Ten BLE CLOBERs were installed at 30-m intervals, and a wired network was established for beacon maintenance, monitoring, and remote control. Using the testbed, we plan to develop position and speed estimation algorithms using BLE CLOBER in tunnel environments and analyze their accuracy. Additionally, remote control technology for beacon monitoring and maintenance will be developed. After verifying feasibility, we plan to expand the BLE CLOBER testbed by more than 1 km by the end of 2025, as shown in Figure 4, and add UWB positioning infrastructure to a 500-m section for precise performance analysis.
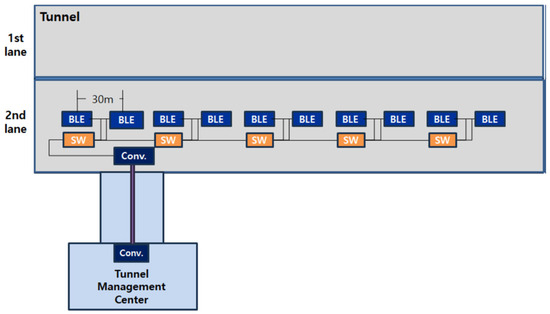
Figure 3.
Architecture of the BLE CLOBER testbed in the Gise Tunnel.
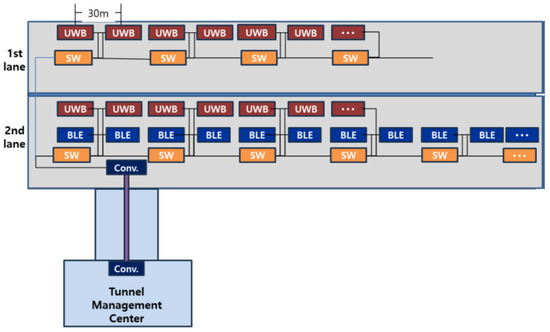
Figure 4.
Future plan for the BLE CLOBER testbed in the Gise Tunnel.
3. Experiment Results
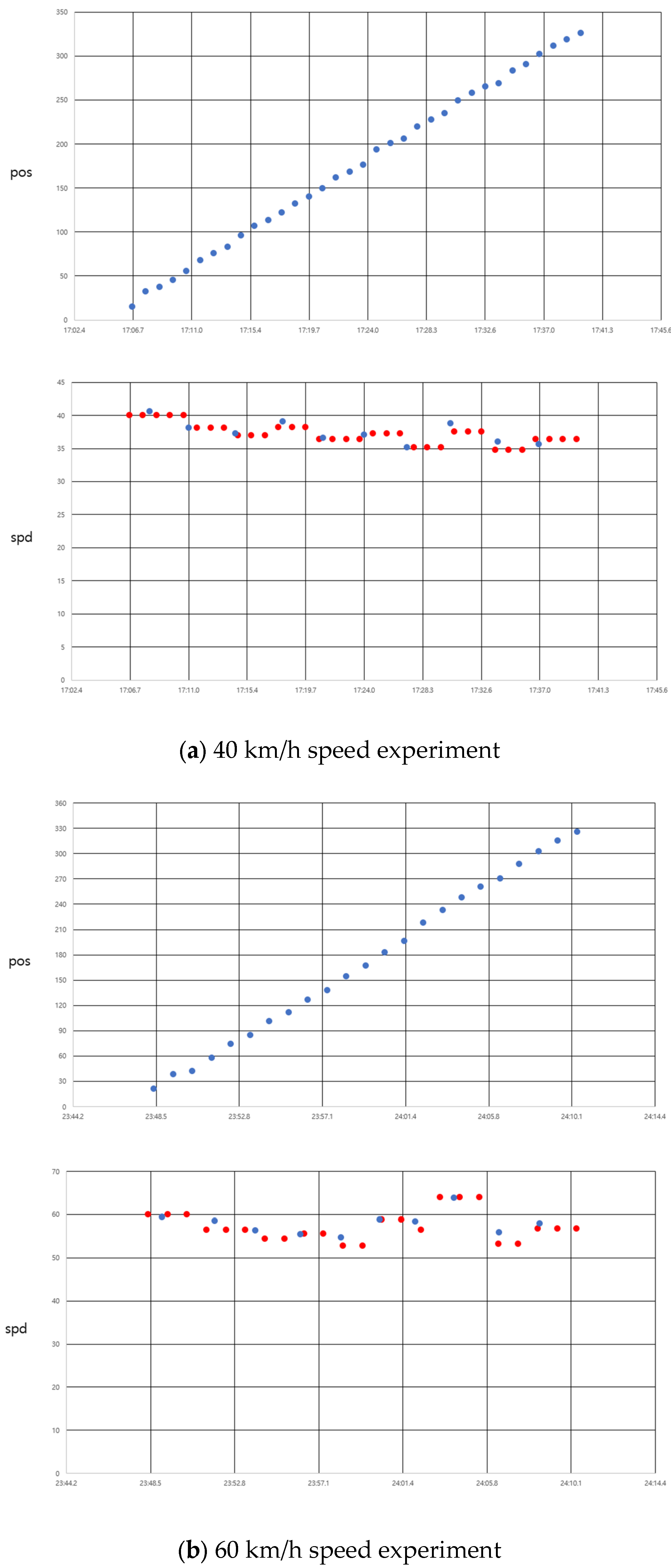
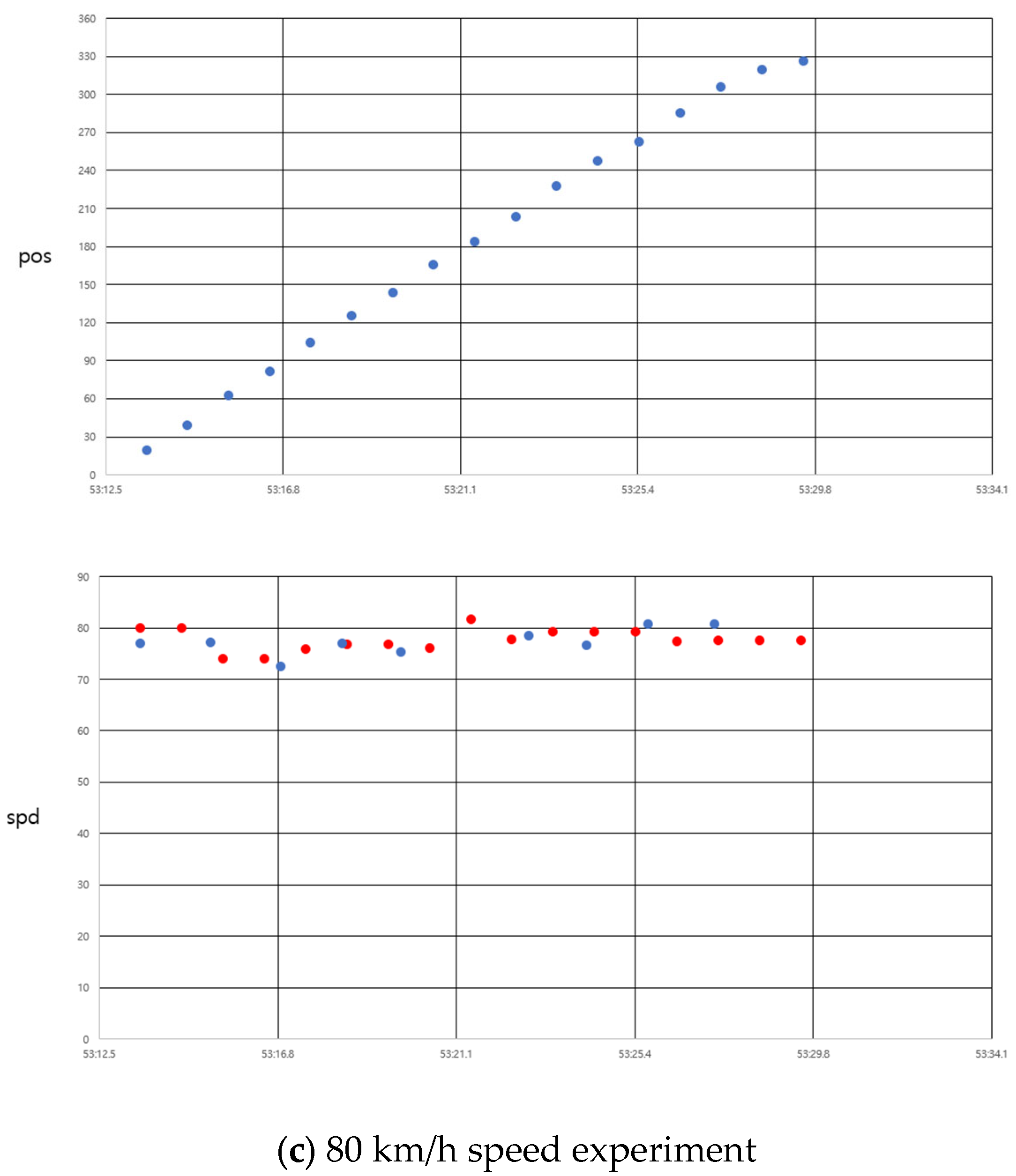
Driving experiments were conducted using the BLE CLOBER testbed installed in the Gise Tunnel. The driving experiments included constant speed tests and acceleration/deceleration tests. The constant speed tests were performed in Cruise drive mode at speeds of 40, 60, and 80 km/h to maintain a constant speed. Figure 5 shows the position and speed profiles for the constant speed experiments. In the figure for speed profile, the blue dots denote the speed computed from the slope of DRSS, and red dots are obtained from pass time between two CLOBERS. As shown in the figure, the speed estimation performance was excellent with an error within 5 km/h, and since it was a constant speed operation, the position increased linearly.
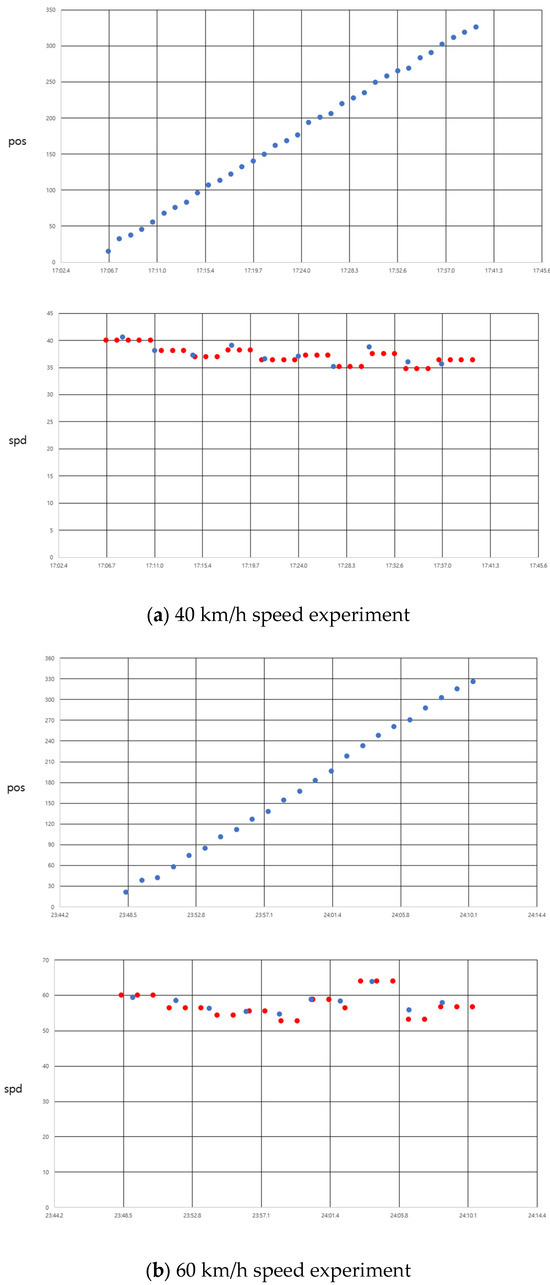
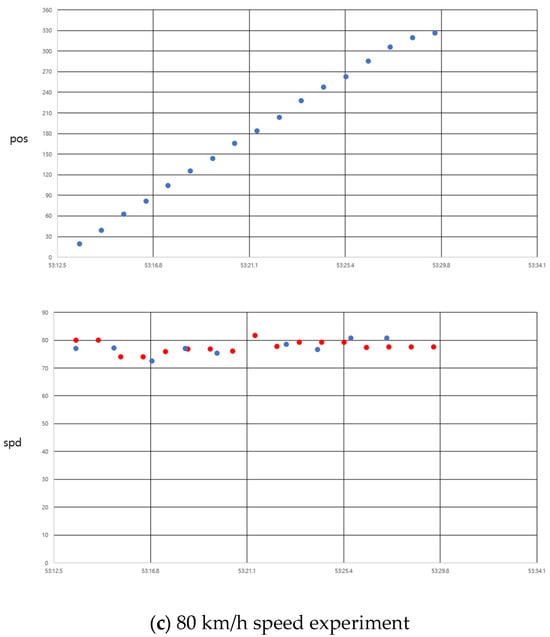
Figure 5.
Position and speed profiles for constant speed experiments: (a) 40 km/h speed; (b) 60 km/h speed; and (c) 80 km/h speed.
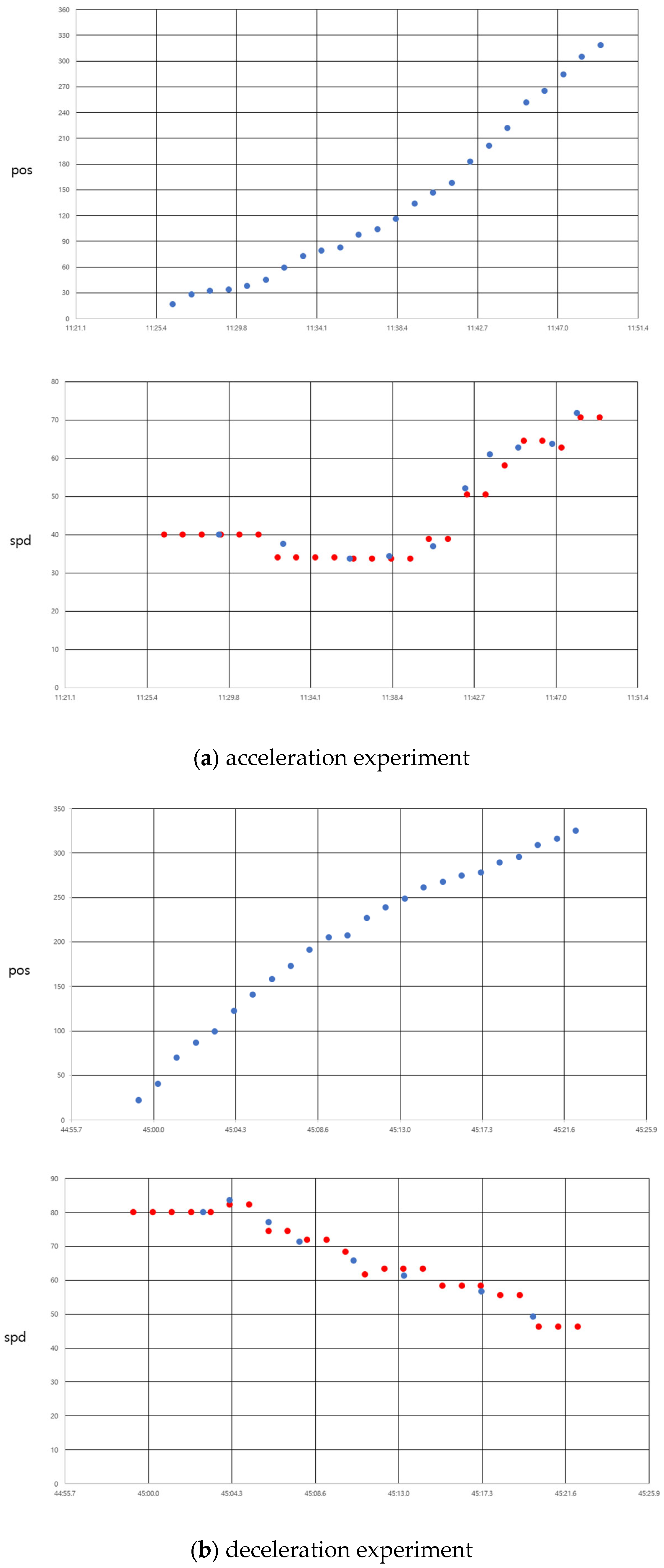
Acceleration/deceleration tests were conducted to verify the ability to detect speed changes. Figure 6 shows the position and speed profiles for the acceleration/deceleration tests. It can be observed that the speed changes were detected promptly as the vehicle passed through the CLOBER. With the future plan of expanding the testbed and the establishment of UWB precision positioning infrastructure, it is expected that more accurate positioning performance will be analyzed in the next studies.
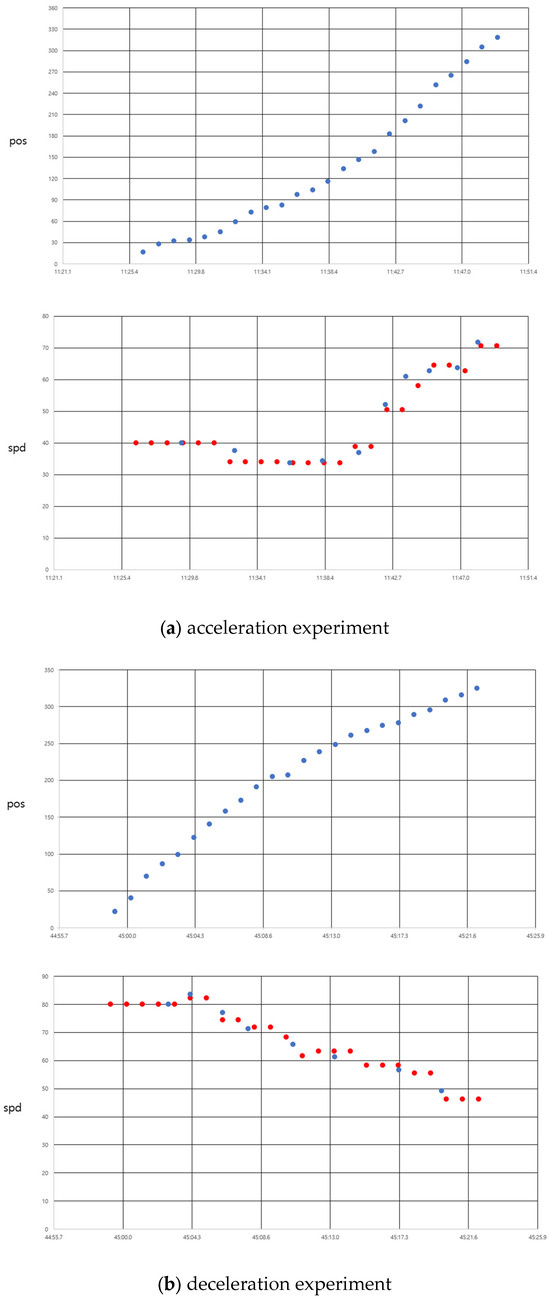
Figure 6.
Position and speed profiles for acceleration/deceleration experiments. (a) Acceleration. (b) Deceleration.
4. Conclusions
This paper proposes a technology to determine the position and speed of vehicles moving at high speeds in tunnels and underground highways using DRSS (differential RSSI) obtained by differencing signals radiated from multidirectional BLE beacons. To verify the performance of the proposed technology, constant speed experiments and acceleration/deceleration driving experiments were conducted using the BLE CLOBER testbed. The experimental results confirmed that the BLE CLOBER-based radio positioning technology developed provides an accuracy of 1–3 m at both low and high speeds, and can quickly detect speed changes. The proposed BLE CLOBER-based radio positioning technology can provide position information compatible with outdoor GNSS accuracy and can be directly applied to smartphones and vehicle navigators, allowing for rapid service expansion.
Author Contributions
Conceptualization & methodology, T.-K.S.; software, J.-Y.J.; validation & formal analysis, J.-W.K.; investigation, S.-J.K., W.-W.L.; writing—original draft preparation, T.-K.S.; writing—review and editing, T.-K.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Private data.
Conflicts of Interest
Author J.-W.K. and J.-Y.J. were employed by the company WiFive. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Alam, M.; Ferreira, J.; Fonseca, J. Intelligent Transportation Systems; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Bensky, A. Wireless Positioning; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Yoo, S.-H.; Sung, T.-K. Development of Precise Indoor Location System Using Multidirectional Beacon. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2017), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Sung, T.K. Device for Estimating Location and Method for Estimating Location by Using Downlink Accesspoint. U.S. Patent 9,942,709, 10 April 2018. [Google Scholar]
- Park, P.; Marco, P.D.; Santucci, F.; Jung, M.; Sung, T.-K. Multidirectional Differential RSS Technique for Indoor Vehicle Navigation. IEEE Internet Things J. 2023, 10, 241–253. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).