2. Exposition
The object of the study is a road traffic accident that occurred in daylight, on a straight, horizontal road section with longitudinal visibility of over 100 m, in a populated area, involving the motorcycle brand “Honda”, model “cbr 125 R” and a pedestrian. The roadway with a total width of 14.1 m is designed for two-way traffic and consists of four lanes (two lanes in each direction). Sidewalks are provided on both sides of the roadway. The motorcycle was moving in the left lane for traffic in its direction, and in the right lane immediately before the scene of the accident there were parked cars. The pedestrian was crossing the roadway from right to left relative to the direction of movement of the motorcycle. The point of contact between the participants is about 30 m after an intersection regulated by a traffic light system. When the trajectories of the participants intersected, a collision occurred between the front left side of the motorcycle and the left side of the pedestrian’s body.
The presence of objects limiting the visibility of the participants (parked cars in the right lane, relative to the direction of movement of the motorcycle), requires the development of a simulation three-dimensional model to determine the visibility of the participants to each other and to analyze the accident’s avoidability.
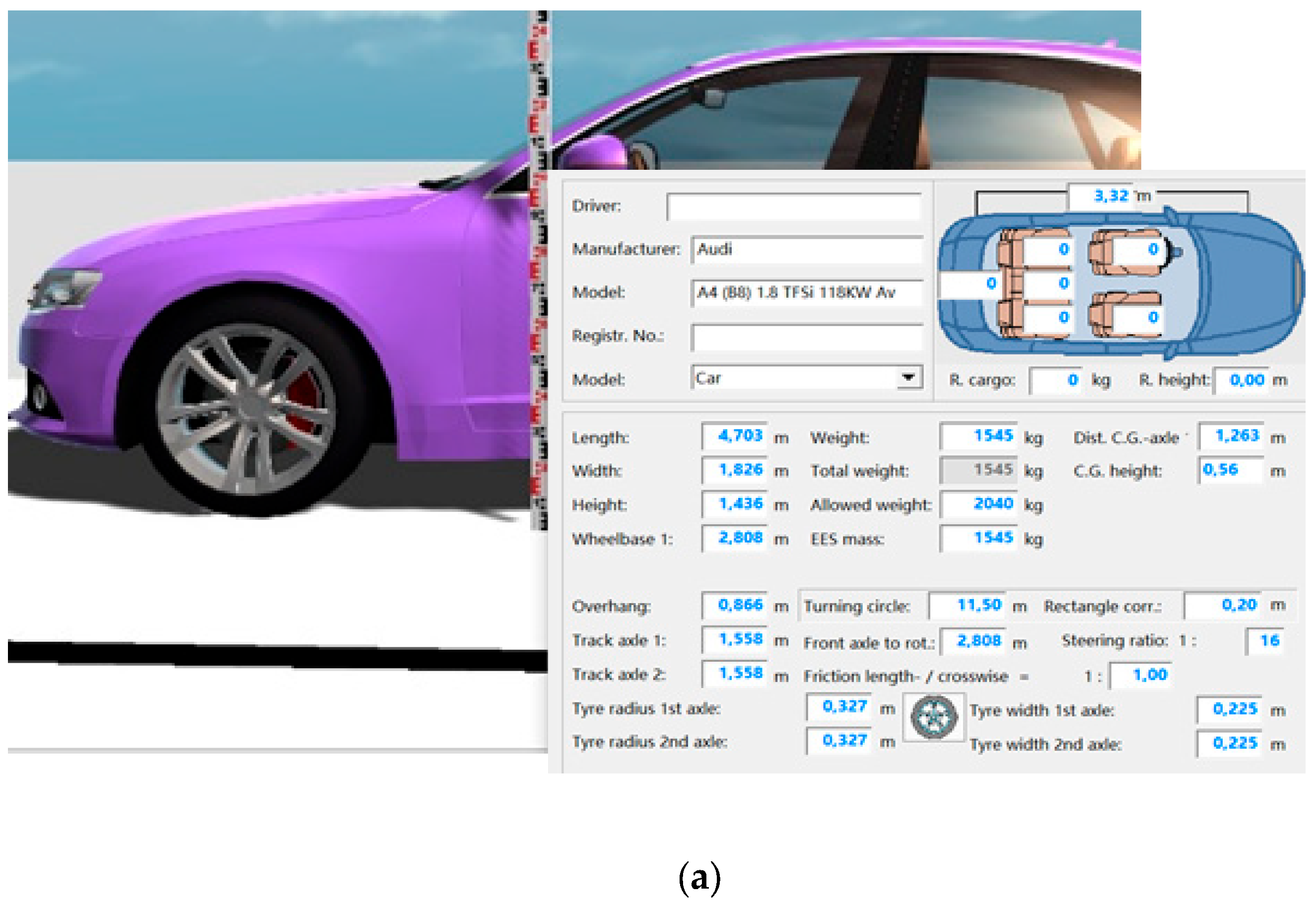
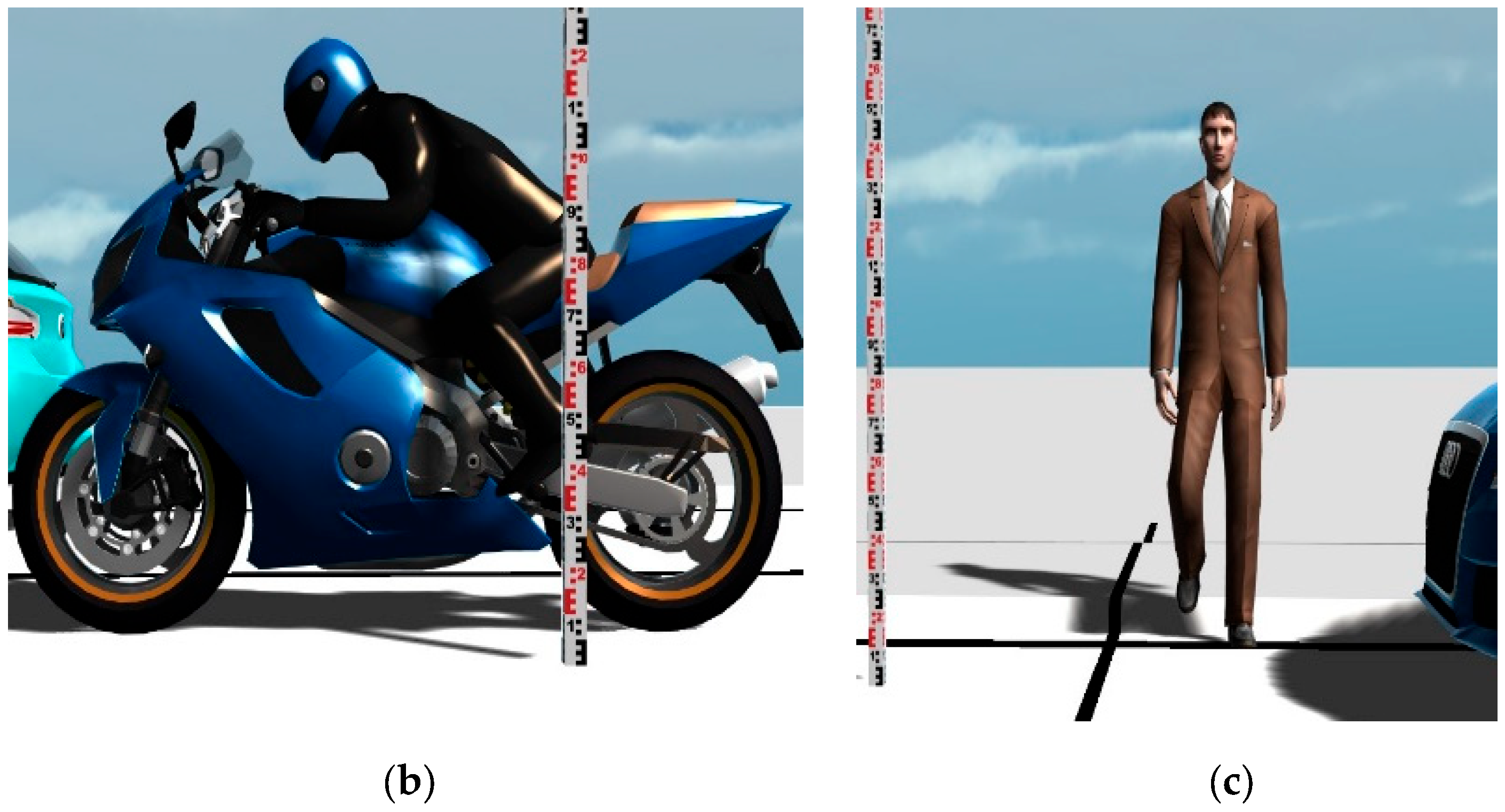
The input parameters taken into account in developing the model include the following: height of the motorcycle seat relative to the ground level—0.80 m; height of the pedestrian—1.61 m; maximum permitted speed of vehicles in the accident area—50 km/h. Based on the available input data, a three-dimensional model of the traffic accident was prepared [
6,
7,
8] using the Analyzer Pro software 24.0, designed for the reconstruction of traffic accidents.
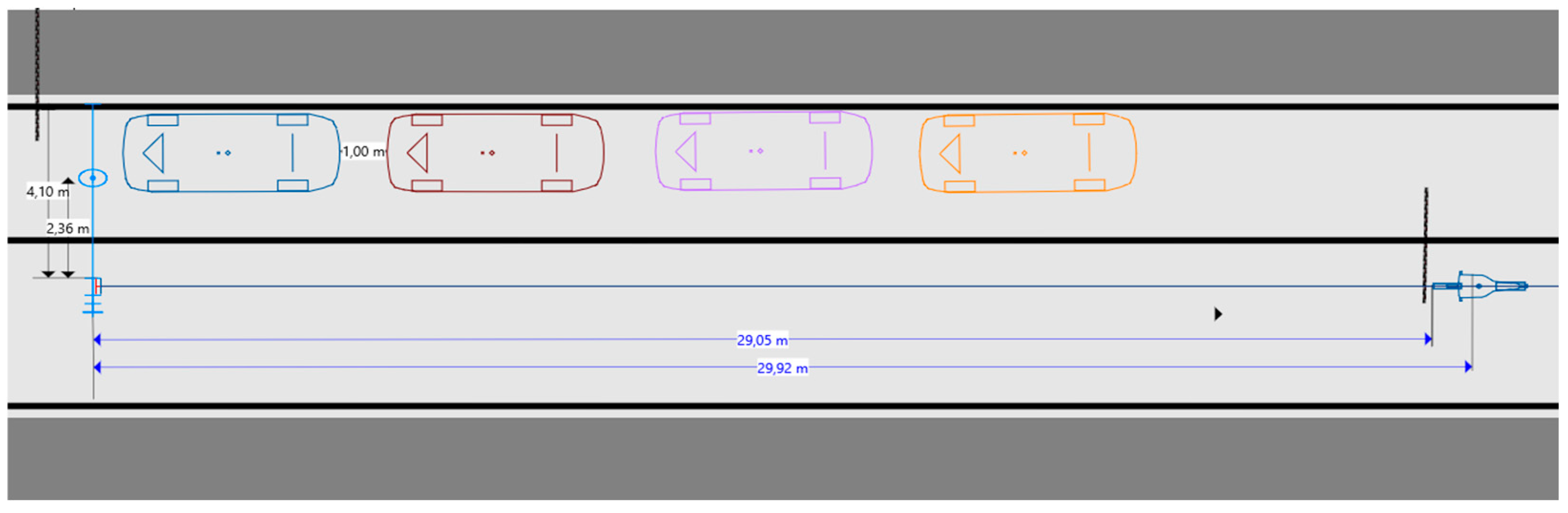
In the materials collected during the investigation, there is no data on the type, number, and coordinates of the vehicles, parked at the right edge of the roadway. In the modelling process vehicles of general dimensions and shape were selected, located at a distance of one metre from each other—
Figure 1a,b shows the selected motorcycle-driver module according to the accepted input data. With a seat height of 0.80 m from the ground level, the selected driver position also covers higher speed driving options. Due to the lack of data on the exact position of the motorcyclist, the study was conducted in the configuration shown in
Figure 1b. The height of the pedestrian corresponds to the input data—1.61 m,
Figure 1c.
In the analysis of the accident, two possible hypotheses were examined, regarding the movement of the motorcycle immediately before the accident.
Hypothesis 1. The motorcycle stops before entering the intersection regulated by a traffic light system.
In this case, the motorcycle travels a total distance of about 50 m, moving with an acceleration of 0.94 m/s2, reaching a speed at the moment of impact of about 35 km/h. According to the data provided, immediately before the impact the pedestrian had changed his direction of movement, going back one or two steps—0.8 m. The total distance travelled by the pedestrian from his stepping on the carriageway to the moment of impact, is the sum of the distance from the right-hand kerb to the point of impact—4.10 m and the distance—2 × 0.8 m or the total distance travelled by the pedestrian is 5.7 m.
In an Analyzer Pro software environment, the motion of the two participants was simulated. The aim is to determine their relative positions at discrete moments and to estimate their visibility to each other. The pedestrian’s movement is divided into four main intervals, each of which is indicated by its duration—t, s; the speed reached at the end of the respective interval—Vp
I, km/h and the distance travelled within the interval—L, m. The motorcycle, from the moment of starting off upon entering the intersection until the impact occurs, accelerates, reaching a speed Vm
I, km/h and travels a distance L, for a period of time—t = L/Vp
I, s. The results from the conducted kinematic analysis are shown in
Table 1.
With the help of the prepared model, visualized in
Figure 2,
Figure 3 and
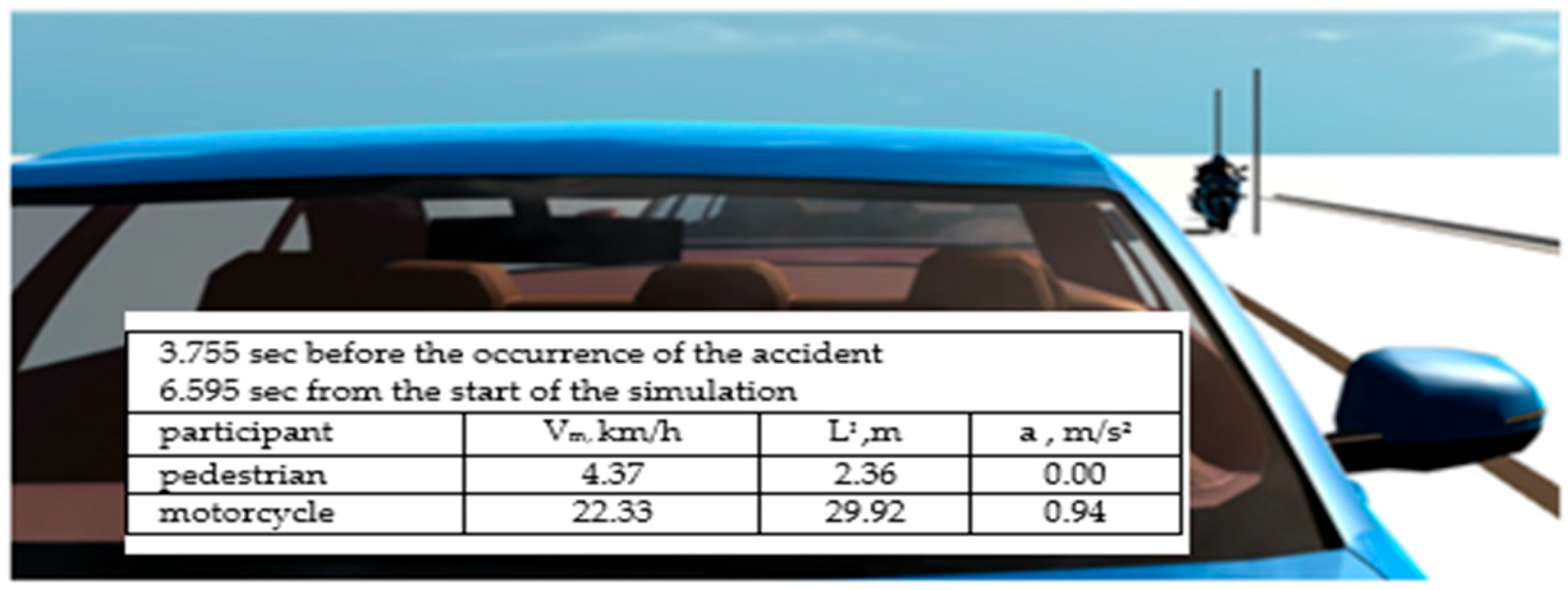
Figure 4, it is established that at a moment 3755 s before the accident the front of the motorcycle was 29.05 m from the point of impact and the point of the motorcycle with which the contact with the pedestrian was made was at a distance of 29.92 m from the point of impact, the driver having a clear view of the pedestrian moving on the roadway. The results obtained refer to a scenario where the driver is in a high-speed driving position and his eye height is about 1.15 m above the road surface (as shown in
Figure 1b).
According to the results obtained, 3.755 s before the accident occurred, the front of the motorcycle was at a distance of 29.05 m from the impact point, and the point of the motorcycle where the contact with the pedestrian occurred was 29.92 m before the impact point, with the motorcycle reaching an instantaneous speed of 22.33 km/h. At the same time, the pedestrian was at a distance of 2.36 m from the impact point.
In the event that the driver had the opportunity to notice the pedestrian, the motorcycle was moving with acceleration (a = const), and the length of its braking distance
Sz is determined by [
9]:
where
S1—the distance travelled by the vehicle during the total driver reaction time, m;
S2—the distance travelled by the vehicle during the braking system activation, m;
S3—the distance travelled by the vehicle during the braking delay increase time, m;
S4—effective braking distance, m.
In the present case, it is necessary to take into account the time interval from the moment of throttle application to the moment of brake application, which is assumed to be
= 0.1 s [
10]. This time needs to be subtracted from the rider’s total reaction time to give the time interval during which the motorcycle was accelerating. For the time from the moment the throttle is removed to the moment the braking system is applied, the motorcycle’s motion is uniform. For the time of increasing brake lag, the motorcycle moves in deceleration, its lag varying according to a linear law. For the time of effective braking, the delay is a constant quantity. The length of the braking distance is determined by the following formula [
9]:
where
t1 = 1.0 s—total driver reaction time;
t2 = 0.2 s—brake system activation time;
t3 = 0.2 s—braking delay rise time;
= 0.1 s—time interval from the moment of accelerator withdrawal to the moment of brake lever actuation (part of reaction time);
Vm = 6.2 m/s = 22.33 km/h—the speed of the vehicle at the moment when the danger to the driver occurs, at acceleration
a = 0.94 m/s
2;
j = 6.87 m/s
2—braking delay.
After substituting the indicated values, it turns out that the length of the motorcycle’s braking distance in this particular situation is Sz−1 = 12.42 m.
When comparing the full braking distance, Sz−1 = 12.42 m, which was necessary for the driver to stop the motorcycle, from 3.755 s before the accident occurred, with the actual distance, at the same moment, from the front of the motorcycle to the point of impact L1 = 29.05 m, the conclusion is that in this situation the motorcycle driver had the technical ability to stop before the impact point, and thus prevent the traffic accident from occurring.
When examining the visibility that the pedestrian had to the approaching motorcycle on his left side, there is the technical conclusion that the victim also had visibility at 3.775 s before the accident to the approaching motorcycle—
Figure 5.
Hypothesis 2. Motorcycle was travelling at a steady speed before the accident occurred.
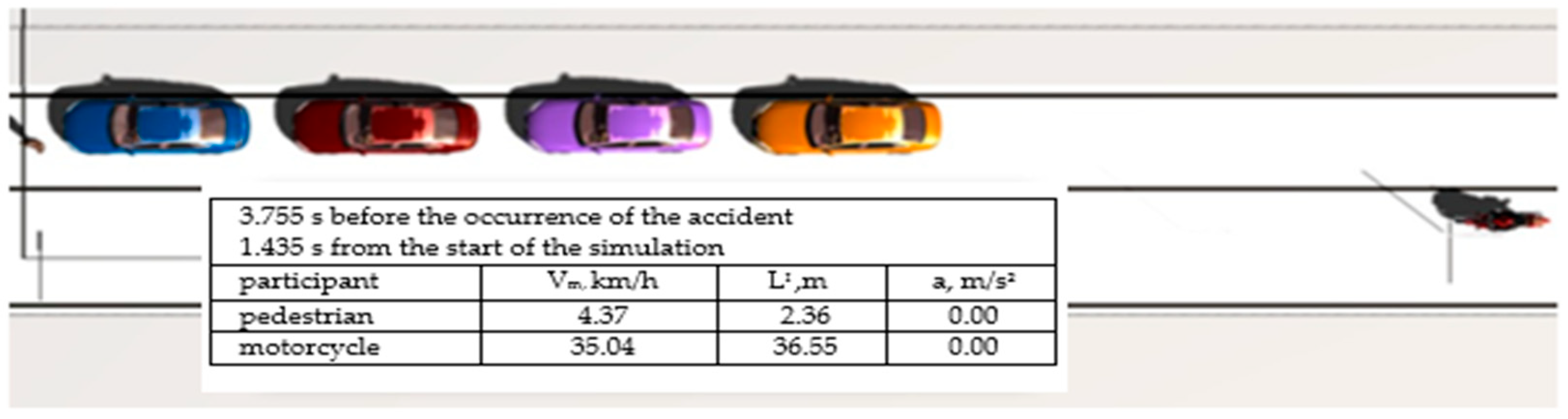
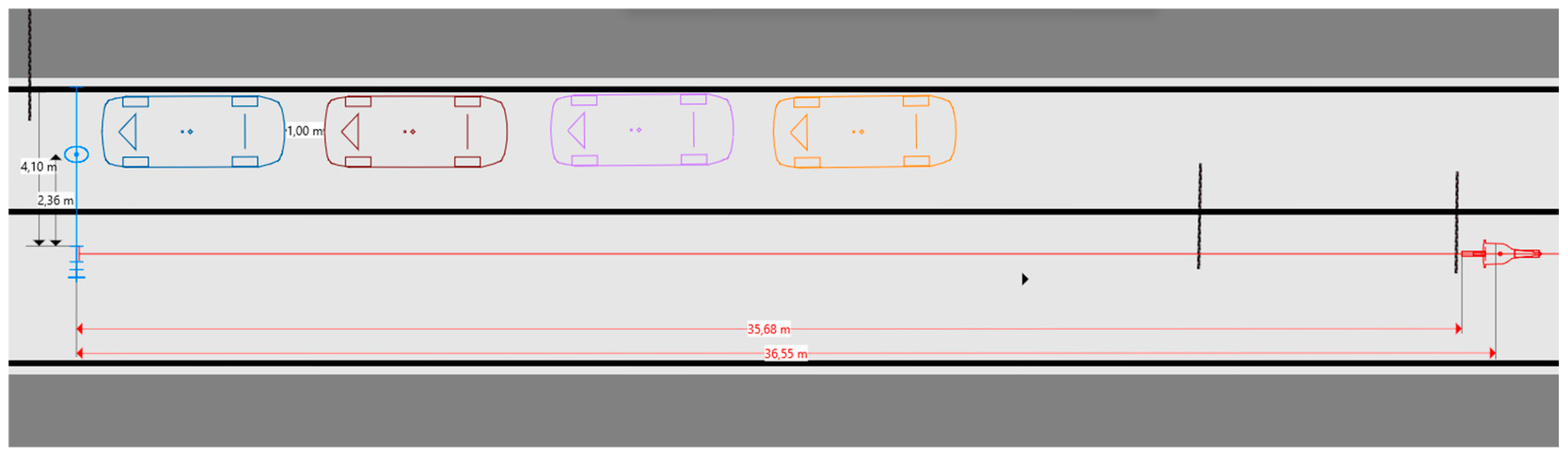
According to the data, immediately before the collision, the pedestrian changed his direction of movement, going back “one or two steps” a distance of about 0.8 m. The total distance travelled by the pedestrian from the moment he stepped onto the carriageway to the moment of impact is 5.7 m. It is defined as the sum of the distance from the right-hand kerb to the point of impact, 4.1 m, and a distance of 2 × 0.8 m = 1.60 m (according to witness testimony, the pedestrian initially moved away from the point of impact by about 0.8 m and then moved backwards). The analysis in examining this hypothesis is carried out, from the moment chosen above, 3.755 s before the accident occurred, at which the victim became clearly visible to the motorcycle driver. The results of the kinematic analysis are shown in
Table 2.
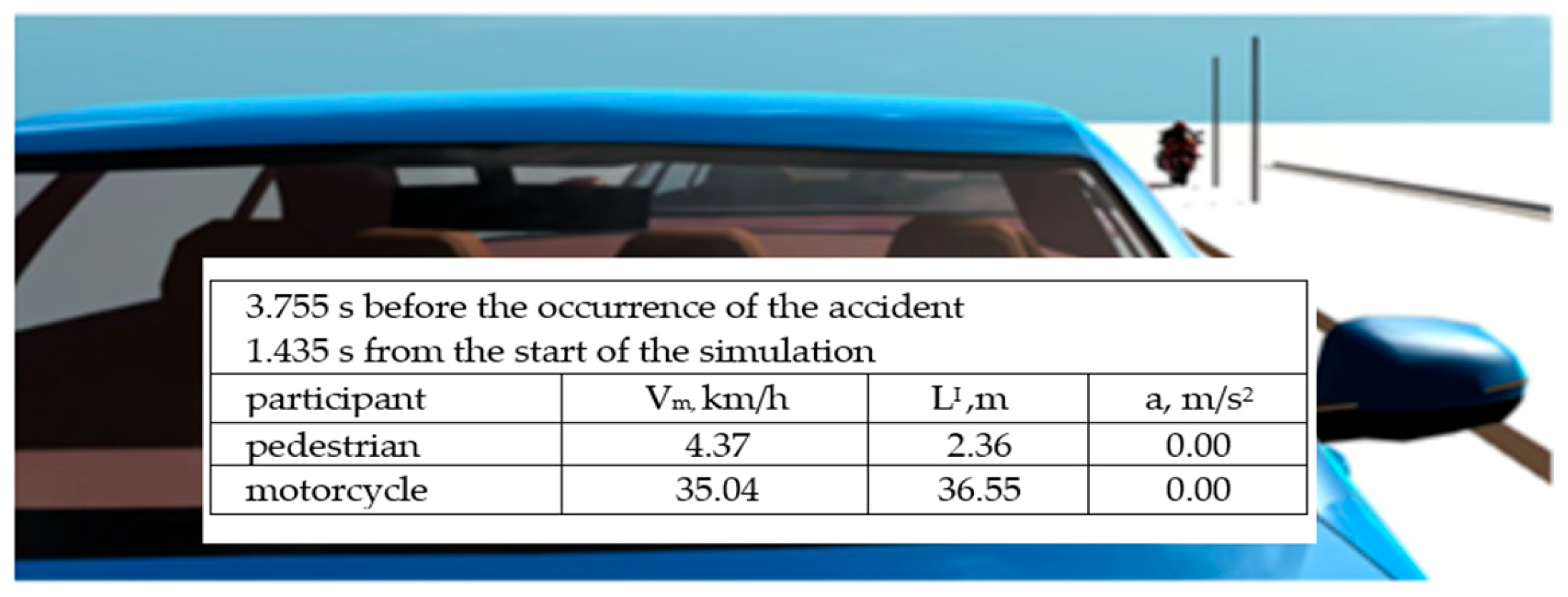
The developed model is shown in
Figure 6,
Figure 7 and
Figure 8. The simulation considers the movement of the participants from the moment the pedestrian stepped onto the roadway. The analysis shows that 3.755 s before the accident, at a time when the front of the motorcycle was 35.68 m from the point of impact and, accordingly, the point of the motorcycle where contact with the pedestrian was made at a later moment was 36.55 m from the point of impact, the motorcycle rider had a clear view of the pedestrian. Again, the results refer to a scenario where the rider is in the optimal driving position at high speeds (
Figure 2) and his eyes are about 1.15 m above the road surface.
According to the calculations presented, 3.755 s before the impact occurred, the motorcycle had a speed of about 35 km/h. The braking distance of the motorcycle in this case is Sz−1 = 20 m.
When comparing the required braking distance determined in the second hypothesis—
Sz−1 = 20 m, in the event that the driver makes an extreme brake 3.755 s before the accident occurs, with the actual distance at the same time from the front of the motorcycle to the point of impact L2 = 35.68 m, the conclusion is reached that the motorcycle driver had the technical ability to stop before the point of impact and thus prevent the accident from occurring. The examination of the pedestrian’s visibility leads to the technical conclusion that 3.755 s before the accident occurs, the pedestrian had visibility of the approaching motorcycle (
Figure 9).
3. Conclusions
The analysis examined the preventability of the impact in the event that the driver was operating the motorcycle in a position corresponding to a height of his gaze of about 1.15 m from the ground. According to the results obtained, in both hypotheses studied, it was established that the driver gained visibility of the pedestrian at a time when the longitudinal distance from the front of the motorcycle to the impact site was significantly greater than the specified braking distance. This eliminates the need to study visibility in a more upright position of the driver, in which the height of his visibility would increase and this would favour the visibility of the pedestrian.
The analysis carried out clearly establishes that, regardless of the nature of the traffic prior to the impact, the driver of the motorcycle had the technical ability to prevent the accident from occurring by braking before reaching the point of impact.
In the event that the motorcycle was moving at an accelerating speed at the moment when its driver had the opportunity to perceive the pedestrian (3.755 s before the accident), a braking distance of Sz−1 = 12.42 m was determined, with the actual distance of the front of the motorcycle to the impact point at the same moment being L1 = 29.05 m. This necessitates the conclusion that in this situation, the motorcycle driver had the technical opportunity to stop before the impact point and thus prevent the accident from occurring.
In the event that the motorcycle was moving at a constant speed of about 35 km/h at the moment when its driver had the opportunity to perceive the pedestrian (3.755 s before the accident occurred), the determined braking distance of the motorcycle is Sz−1 = 20 m, with the actual distance at the same moment from the front of the motorcycle to the impact point L2 = 35.68 m. This necessitates the conclusion that in this situation, the motorcycle driver had the technical ability to stop before the impact point and thus prevent the traffic accident from occurring.
If the pedestrian had not changed his initial direction of movement (from right to left relative to the direction of movement of the motorcycle), the trajectories of the two participants would not have intersected, and a traffic accident would not have occurred.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}