
Comparative Analysis of Indoor Localization across Various Wireless Technologies


Abstract
:1. Introduction
2. Related Work
- Investigation of indoor localization techniques, such as the Centroid algorithm, Trilateration, and Grid-Based RSS method. Analyzing their performance behavior under various wireless technologies, as well as varying levels of path loss and setting dimension.
- Rigorous and comprehensive simulations were conducted under various experimental scenarios. Each method’s performance was thoroughly evaluated based on criteria such as efficiency, precision, and adaptability across diverse technology environments.
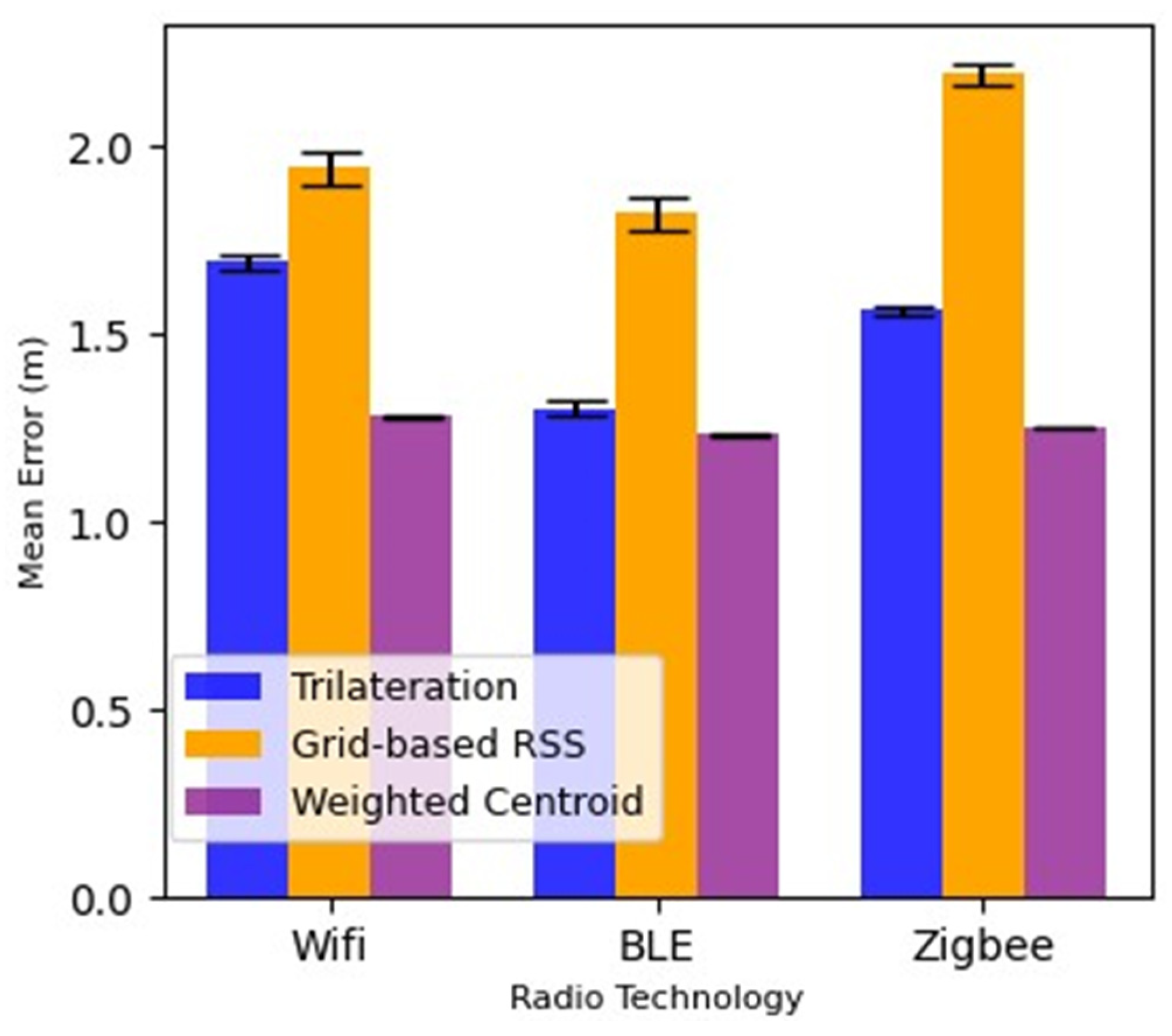
- Detailed analysis of influence factors like noise levels, technology types (Wi-Fi, ZigBee, BLE), and tag node density and layout on the performance of each localization technique.
- Execution using Google Colab’s cloud-based GPU platform for optimized calibration procedures while providing insights into the selection of appropriate indoor localization techniques.
3. Problem Statement and Localization Techniques
3.1. Problem Statement
3.2. Localization Techniques
3.2.1. Trilateration
3.2.2. The Weighted Centroid Algorithm
3.2.3. Grid-Based RSS
4. Methodology
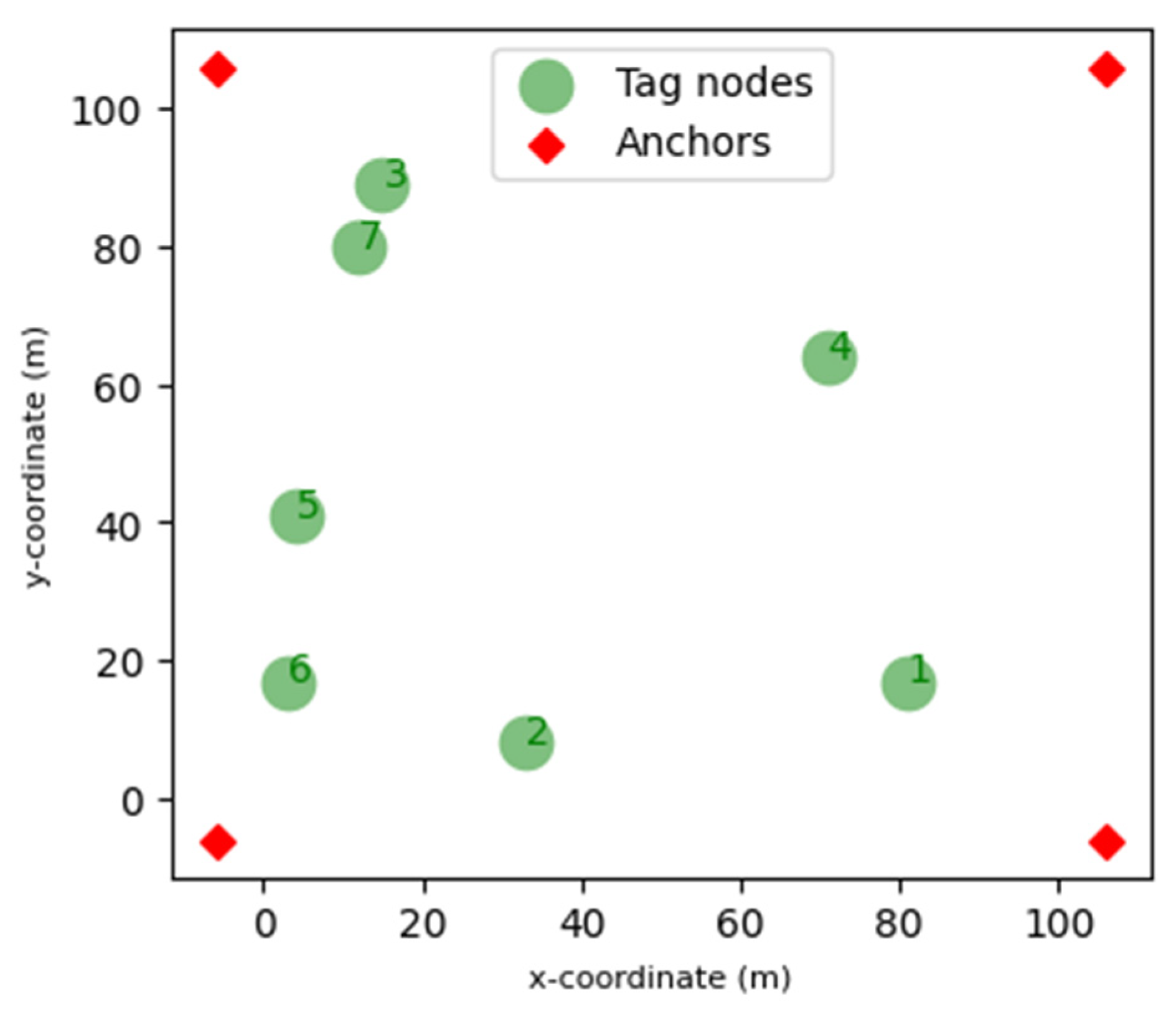
4.1. Experiment 1 (Tag Nodes Deployed Randomly)
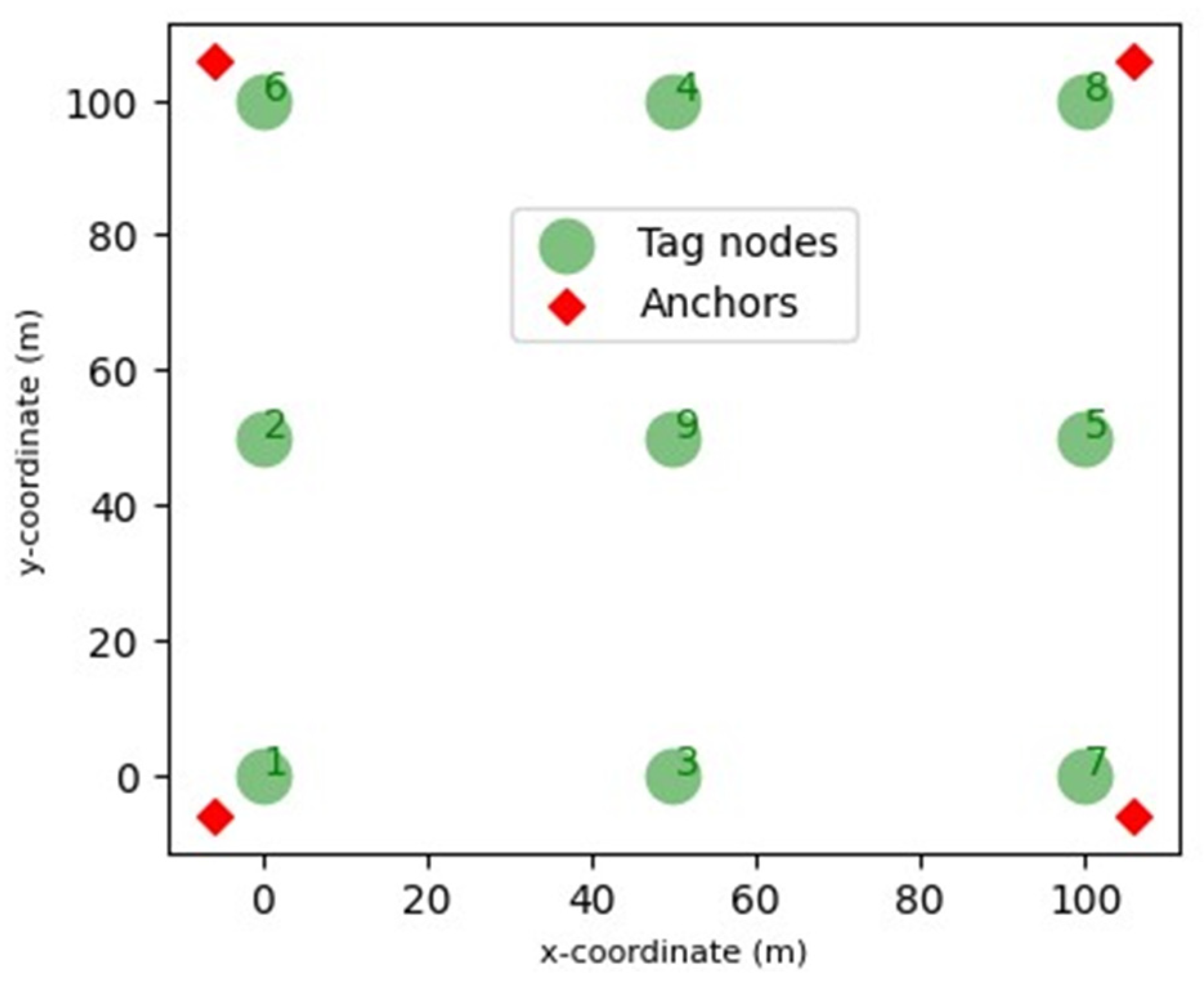
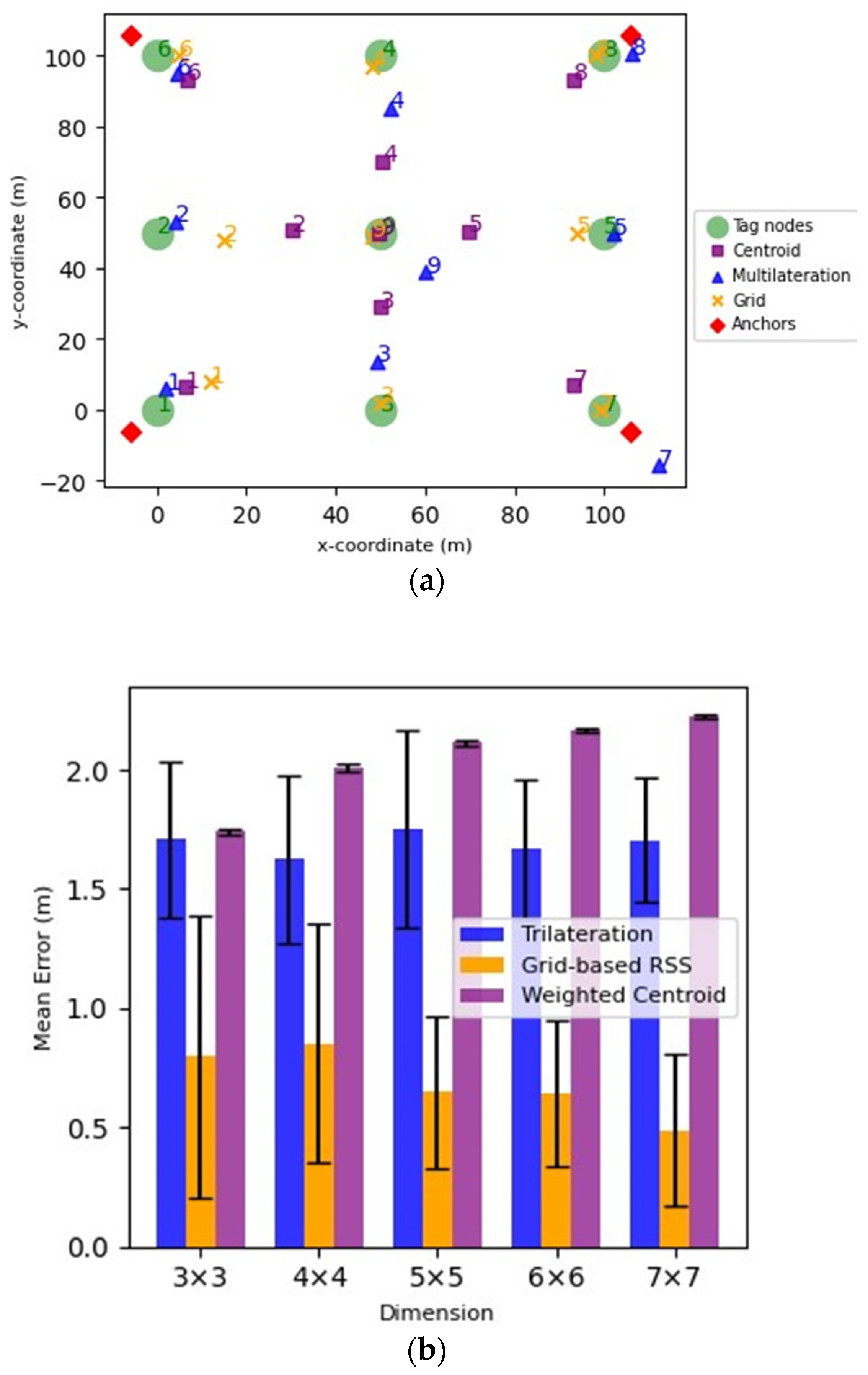
4.2. Experiment 2 (Tag Nodes across Boundaries/Center)
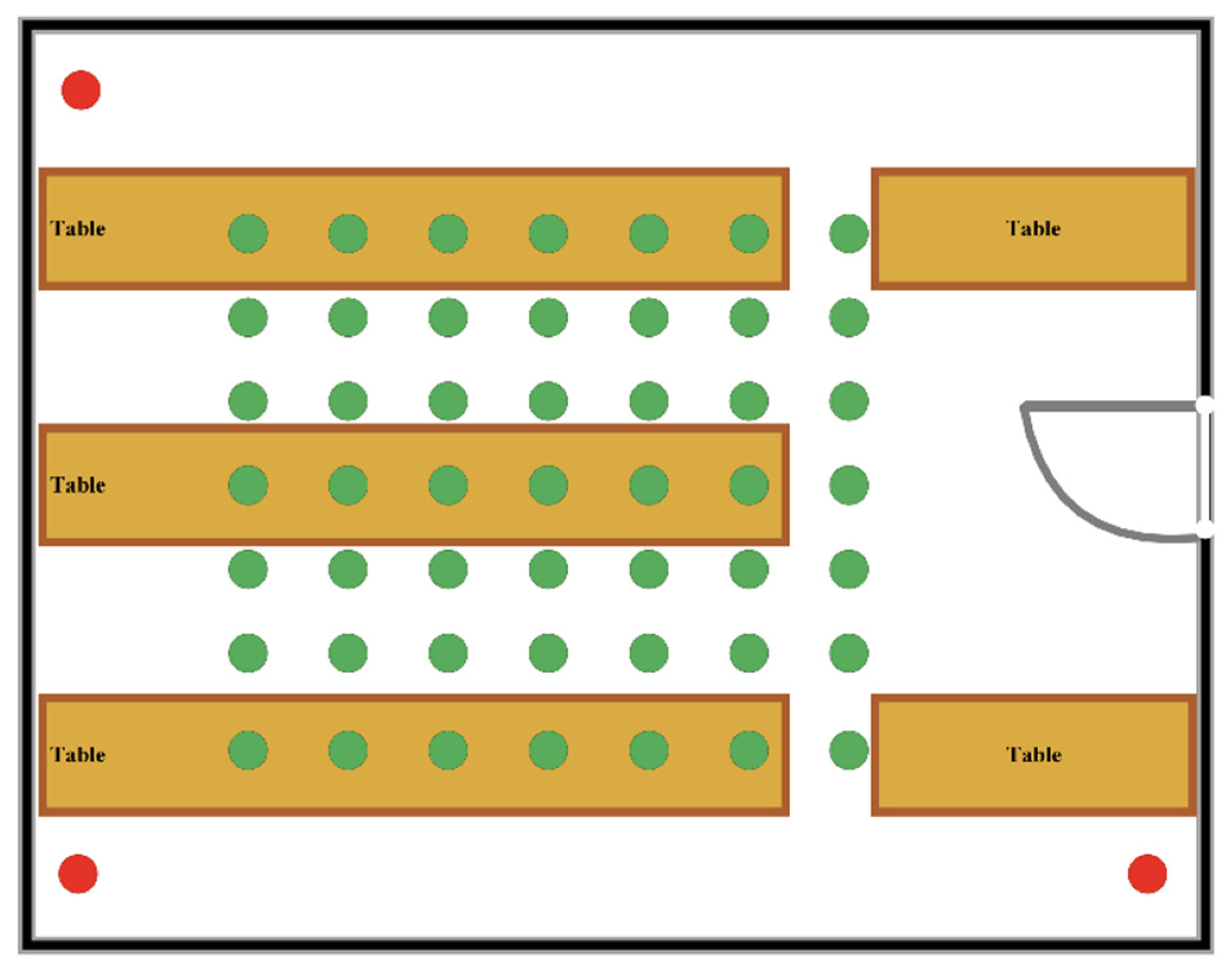
4.3. Experiment 3 (Real-World Dataset)
5. Experiment and Results
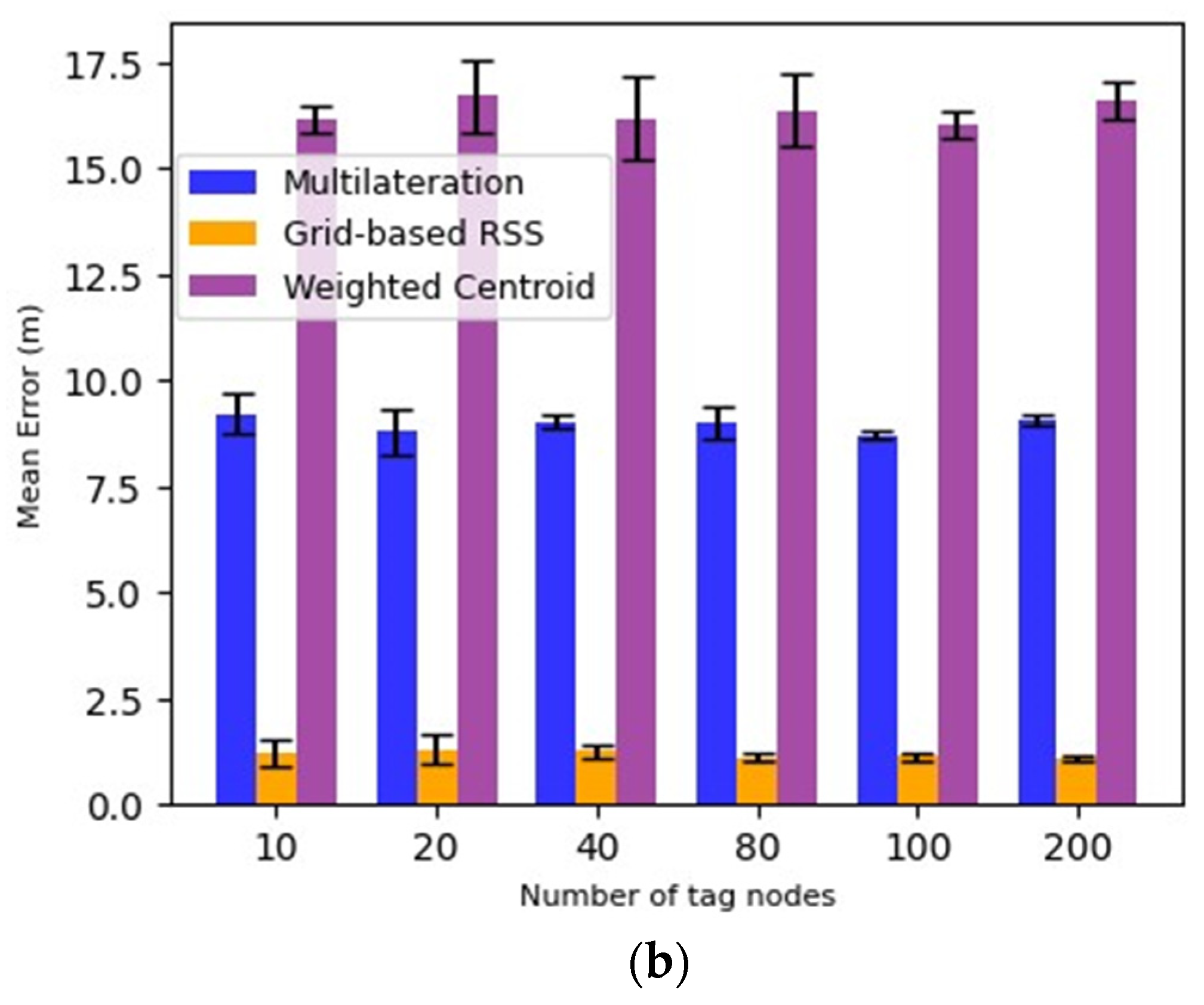
5.1. Results Related to Experiment 1
5.2. Results Related to Experiment 2
5.2.1. Dimension vs. Mean Error
5.2.2. Noise vs. Mean Error
5.3. Results Related to Experiment 3
6. Discussion
- (1)
- Weighted centroid exhibits position bias:
- If the localization accuracy of boundary nodes is higher than that of diagonal nodes in 3D, it implies that the weighted centroid is biased towards the position of the nodes.
- If both edge nodes and diagonal nodes have the same accuracy, and the z-coordinate of diagonal nodes has higher error than edge nodes, while the xy-coordinate of diagonal nodes has less error than edge nodes, it also suggests that the weighted centroid is biased towards the position of the nodes.
- If diagonal nodes have higher accuracy than edge nodes, it means that the weighted centroid localizes diagonal tag nodes more accurately than edge nodes. Consequently, this finding confirms the position bias of the weighted centroid in 3D.
- (2)
- Weighted centroid is more robust to noise compared to the other two techniques:
- (3)
- Grid-based RSS is highly sensitive to noise and theoretical RSSI:
- (4)
- Trilateration performs best in the BLE technology:
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bibbò, L.; Carotenuto, R.; Della Corte, F. An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors 2022, 22, 8119. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Jia, Y. Indoor localization for mobile robots using lampshade corners as landmarks: Visual system calibration, feature extraction and experiments. Int. J. Control Autom. Syst. 2014, 12, 1313–1322. [Google Scholar] [CrossRef]
- Low, R.; Tekler, Z.D.; Cheah, L. An end-to-end point of interest (Poi) conflation framework. ISPRS Int. J. Geo-Inf. 2021, 10, 779. [Google Scholar] [CrossRef]
- Al Mtawa, Y. Towards Enhanced Location and Sensing Services for the Internet of Things. Canada—Ontario, CA. 2017. Available online: https://www.proquest.com/dissertations-theses/towards-enhanced-location-sensing-services/docview/1928875971/se-2?accountid=15067 (accessed on 29 July 2023).
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef] [PubMed]
- Sinha, S.; Ashwini, S. RSSI based improved weighted centroid localization algorithm in WSN. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET 2021), Belgaum, India, 21–23 May 2021. [Google Scholar] [CrossRef]
- Raza, S.M.; Le, D.T.; Al Mtawa, Y.; Hassanein, H.S.; Nasser, N. Resilient Localization and Coverage in the Internet of Things. Electronics 2023, 12, 3172. [Google Scholar] [CrossRef]
- Podevijn, N.; Plets, D.; Trogh, J.; Karaagac, A.; Haxhibcqiri, J.; Hoebeke, J.; Martens, L.; Suanet, P.; Joseph, W. Performance Comparison of RSS Algorithms for Indoor Localization in Large Open Environments. In Proceedings of the IPIN 2018—9th International Conference on Indoor Positioning and Indoor Navigation, Nantes, France, 24–27 September 2018. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A Survey on Wireless Indoor Localization from the Device Perspective. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef]
- He, S.; Chan, S.-H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Hassan, N.U.; Naeem, A.; Pasha, M.A.; Jadoon, T.; Yuen, C. Indoor Positioning Using Visible LED Lights. ACM Comput. Surv. 2015, 48, 1–32. [Google Scholar] [CrossRef]
- Latif, E.; Parasuraman, R. Online Indoor Localization Using DOA of Wireless Signals. arXiv 2022, arXiv:2201.05105. Available online: https://arxiv.org/abs/2201.05105v1 (accessed on 29 July 2023).
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Van Haute, T.; Rossey, J.; Becue, P.; De Poorter, E.; Moerman, I.; Demeester, P. A hybrid indoor localization solution using a generic architectural framework for sparse distributed wireless sensor networks. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems (FedCSIS 2014), Warsaw, Poland, 7–10 September 2014; pp. 1009–1015. [Google Scholar] [CrossRef]
- Tiglao, N.M.; Alipio, M.; Cruz, R.D.; Bokhari, F.; Rauf, S.; Khan, S.A. Smartphone-based indoor localization techniques: State-of-the-art and classification. Measurement 2021, 179, 109349. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Yang, L.; Liu, T. Real-Time Indoor Positioning Approach Using iBeacons and Smartphone Sensors. Appl. Sci. 2020, 10, 2003. [Google Scholar] [CrossRef]
- Conte, G.; De Marchi, M.; Nacci, A.A.; Rana, V.; Sciuto, D. BlueSentinel: A first approach using iBeacon for an energy efficient occupancy detection system. In Proceedings of the BuildSys 2014—1st ACM Conference on Embedded Systems for Energy-Efficient Buildings, Association for Computing Machinery, Memphis, TN, USA, 5–6 November 2014; pp. 11–19. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Crispino, R.; Marletta, V. An Introduction to Indoor Localization Techniques. Case of Study: A Multi-Trilateration-Based Localization System with User–Environment Interaction Feature. Appl. Sci. 2021, 11, 7392. [Google Scholar] [CrossRef]
- Priyadarshi, R.; Gupta, B.; Anurag, A. Deployment techniques in wireless sensor networks: A survey, classification, challenges, and future research issues. J. Supercomput. 2020, 76, 7333–7373. [Google Scholar] [CrossRef]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P.; Plataniotis, K.N. Memoryless Techniques and Wireless Technologies for Indoor Localization with the Internet of Things. IEEE Internet Things J. 2020, 7, 10996–11005. [Google Scholar] [CrossRef]
- Manolakis, D.E. Efficient solution and performance analysis of 3-D position estimation by trilateration. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1239–1248. [Google Scholar] [CrossRef]
- Wang, Z.M.; Zheng, Y. The study of the weighted centroid localization algorithm based on RSSI. In Proceedings of the Proceedings—2014 International Conference on Wireless Communication and Sensor Network (WCSN 2014), Wuhan, China, 13–14 December 2014; pp. 276–279. [Google Scholar] [CrossRef]
- GitHub—Pspachos/RSSI-Dataset-for-Indoor-Localization-Fingerprinting: RSSI Dataset for Fingerprinting with Zigbee, BLE and WiFi. Available online: https://github.com/pspachos/RSSI-Dataset-for-Indoor-Localization-Fingerprinting (accessed on 29 July 2023).
- Cho, Y.H.; Byun, W.J. Generalized Friis Transmission Equation for Orbital Angular Momentum Radios. IEEE Trans. Antennas Propag. 2019, 67, 2423–2429. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Localization Techniques Used | Wireless Technology Used | Experimental Settings | Parameter Settings |
|---|---|---|---|---|
| Tag Placement/Scalability | ||||
| [13] | PF-DOA, Weighted centroid, Markov Grid, Differential RSS | Wi-Fi, ZigBee and BLE | Simulation and two real-world datasets | Consider noise but not dimension; Random, boundary and diagonal tag placement |
| [15] | Weighted centroid (range-based), Proximity-based (range-free) | Wi-Fi, ZigBee, and Bluetooth | iMinds testbed/2 real-world environment | Consider tag placement and dimension |
| [17] | Trilateration, Fingerprinting | BLE | Real-time positioning experiments | Consider boundary tag placement |
| [18] | BLE-based iBeacon | BLE | A real environment with a prototype system | Consider tag placement but not dimension |
| [19] | Machine Learning | BLE | Two real-world datasets (2 different office areas with 650 m2 e and 248 m2) divided into zones | Occupancy density in irregular zones. Larger zones include more beacons to ensure signal coverage, with a total of 39 beacons |
| [23] | K-Nearest Neighbor (KNN), and Naive Bayes, Trilateration | Zigbee, BLE and Wi-Fi | Three real-world datasets | Consider interference levels; random and grid tag placement |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, A.; Emam, M.; Al Mtawa, Y. Comparative Analysis of Indoor Localization across Various Wireless Technologies. Eng 2023, 4, 2293-2308. https://doi.org/10.3390/eng4030131
Singh A, Emam M, Al Mtawa Y. Comparative Analysis of Indoor Localization across Various Wireless Technologies. Eng. 2023; 4(3):2293-2308. https://doi.org/10.3390/eng4030131
Chicago/Turabian StyleSingh, Amanpreet, Matin Emam, and Yaser Al Mtawa. 2023. "Comparative Analysis of Indoor Localization across Various Wireless Technologies" Eng 4, no. 3: 2293-2308. https://doi.org/10.3390/eng4030131
APA StyleSingh, A., Emam, M., & Al Mtawa, Y. (2023). Comparative Analysis of Indoor Localization across Various Wireless Technologies. Eng, 4(3), 2293-2308. https://doi.org/10.3390/eng4030131