
Real-Time Human Authentication System Based on Iris Recognition


 ,
,  and
and
Abstract
1. Introduction
2. Proposed System
2.1. Data Acquisition
2.2. Pre-Processing
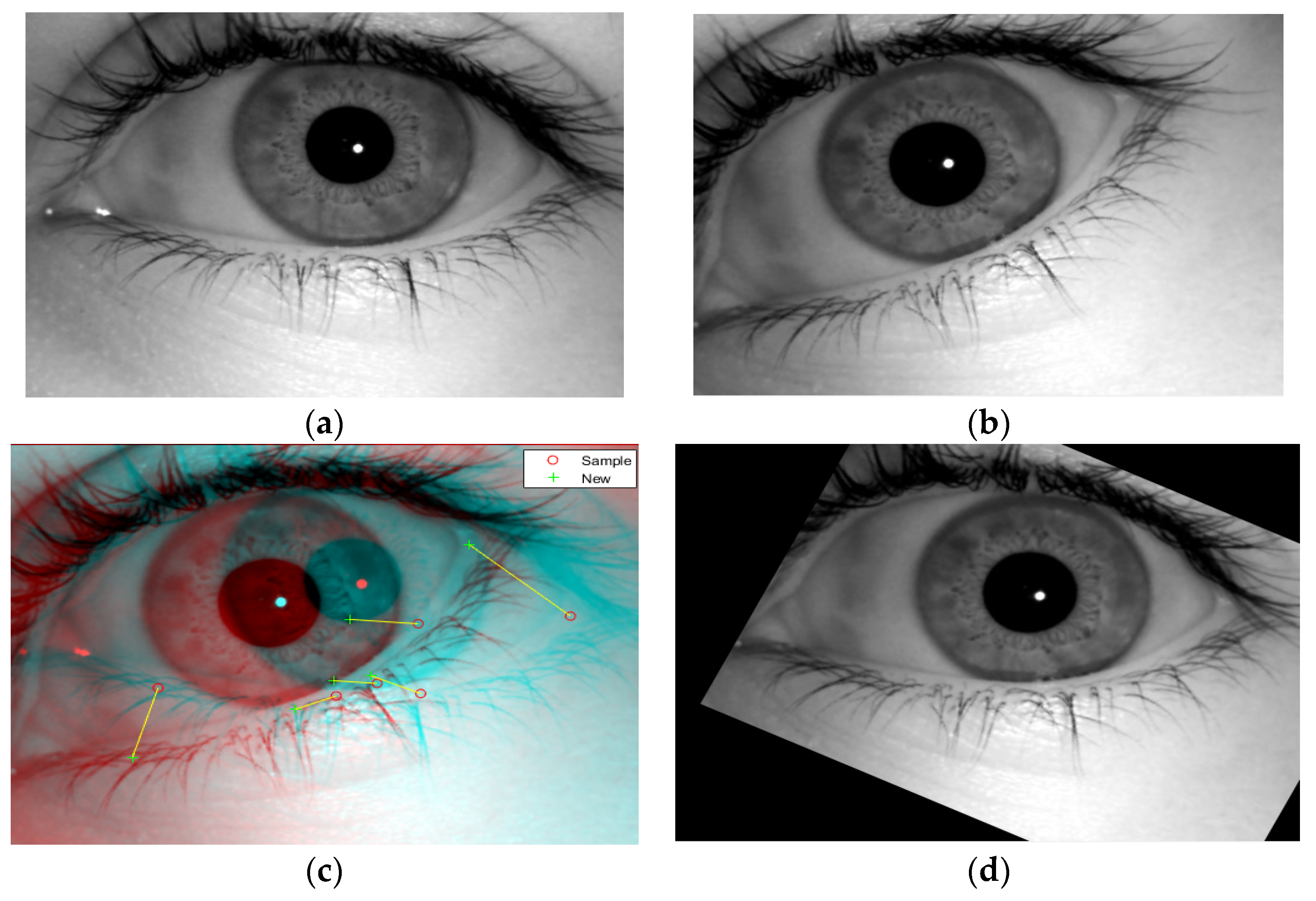
2.3. Image Registration
| Algorithm 1: Image Registration. |
| Step 1: Read sample iris image and new (i.e., tilted or rotated) grayscale eye image. Step 2: Detect surface features of both images. Step 3: Extract features from both images. Step 4: Find the matching features using Equation (2). Step 5: Retrieve location of corresponding points for both images using Equation (3). Step 6: Find a transformation corresponding to the matching point pairs using M-estimator Sample Consensus (MSAC) algorithm. Step 7: Use geometric transform to recover the scale and angle of new image corresponding to the sample image. Let sc = scale ∗ cos (theta) and ss = scale ∗ sin (theta), then: Tinv = [sc-ss 0; ss sc 0; tx ty 1] where tx and ty are x and y translations of new image relative to the sample image, respectively. Step 8: Make the size of new image same as that of sample and display in same frame. |
2.4. Segmentation
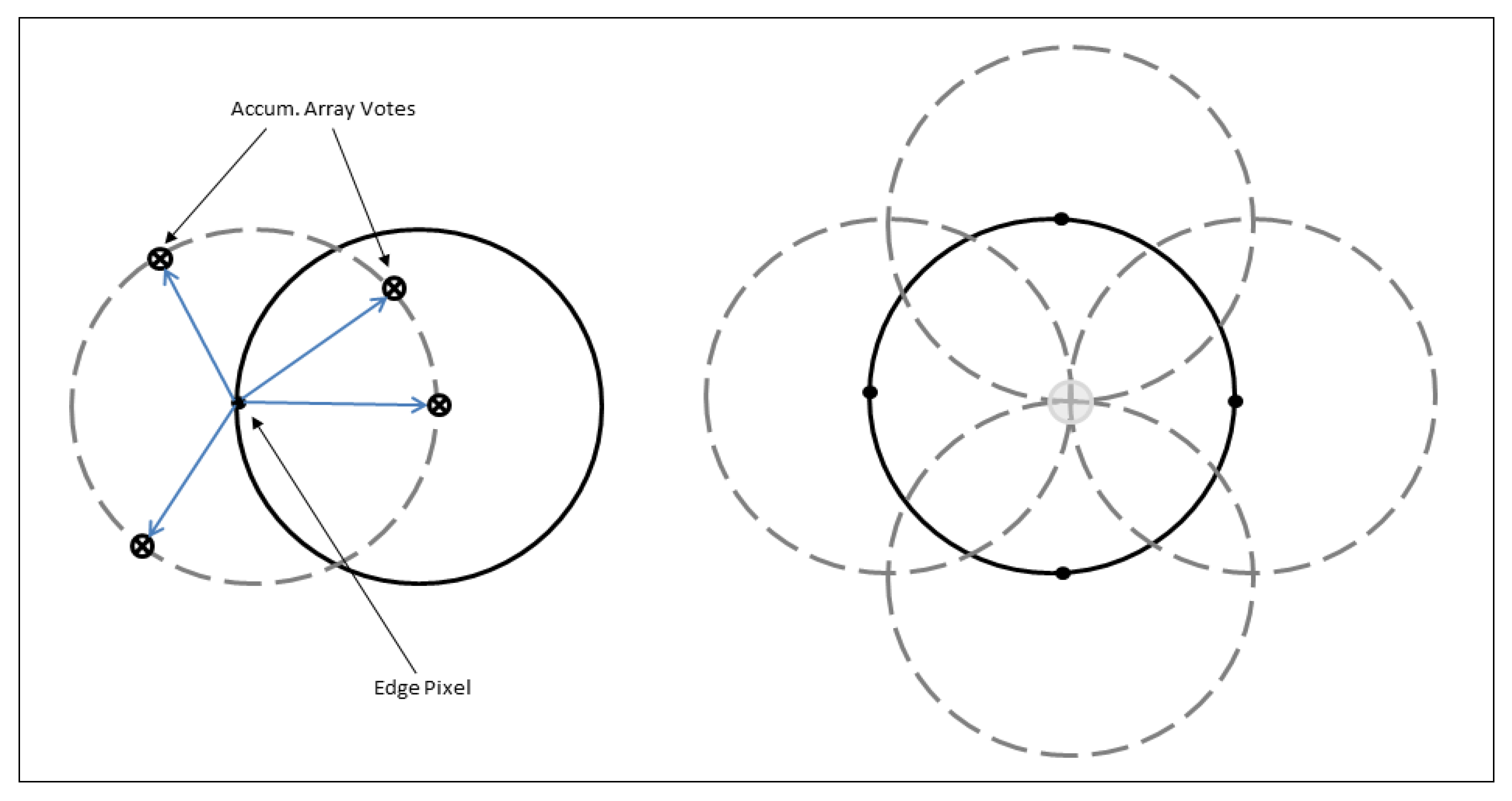
| Algorithm 2: Circle Detection Using Circular Hough Transform. |
| Step 1: Define iris radius range [50, 155] and pupil radius range [20, 55]. Step 2: Define object polarity bright as dark. Step 3: Define sensitivity of 0.98. Step 4: Define edge threshold value of 0.05. Step 5: Apply circular Hough transform for boundary detection. Step 6: Find centers and radii and display only required circles. Step 7: Display the detected iris portion. Step 8: Apply mask to separate the iris from eye. |
2.5. Feature Extraction
2.5.1. Two-Dimensional Discrete Wavelet Transform (2-D DWT)
2.5.2. Edge Detection:
| Algorithm 3: Feature Extraction using Edge Detection. |
| Step 1: Convolve the Gaussian filter with image to smooth the image using: where is standard deviation and kernel size is (2k + 1) × (2k + 1). Step 2: Compute the local gradient at each point. Step 3: Find edge direction at each point. Step 4: Apply an edge thinning technique to get more accurate representation of real edges. Step 5: Apply hysteresis thresholding based on two thresholds, and with , to determine potential edges in image. Step 6: Perform edge linking by incorporating the weak pixels connected to the strong pixels. |
2.6. Feature Matching
2.6.1. Hamming Distance
2.6.2. Absolute Differencing
3. Principal Component Analysis (PCA)
| Algorithm 4: Principal Component Analysis (PCA). |
| Step 1: Create MAT file of the database and load database. Step 2: Find the mean of images using . Step 3: Find the mean shifted input image. Step 4: Calculate the Eigen vector and Eigen values using , where matrix λ is the Eigen value of non-zero square matrix (A) corresponding to ʋ. Step 5: Find the cumulative energy content for each Eigen vector by , j = 1, 2, 3,…, p. It will retain the top principal components only. Step 6: Create the feature vector by taking the product of cumulative energy content of Eigen vector and mean shifted input image. Step 7: Separate out feature vector (iris section) from input image. Step 8: Find the similarity score with images in database. Step 9: Display the image having highest similarity score with input image. |
4. Results and Discussion
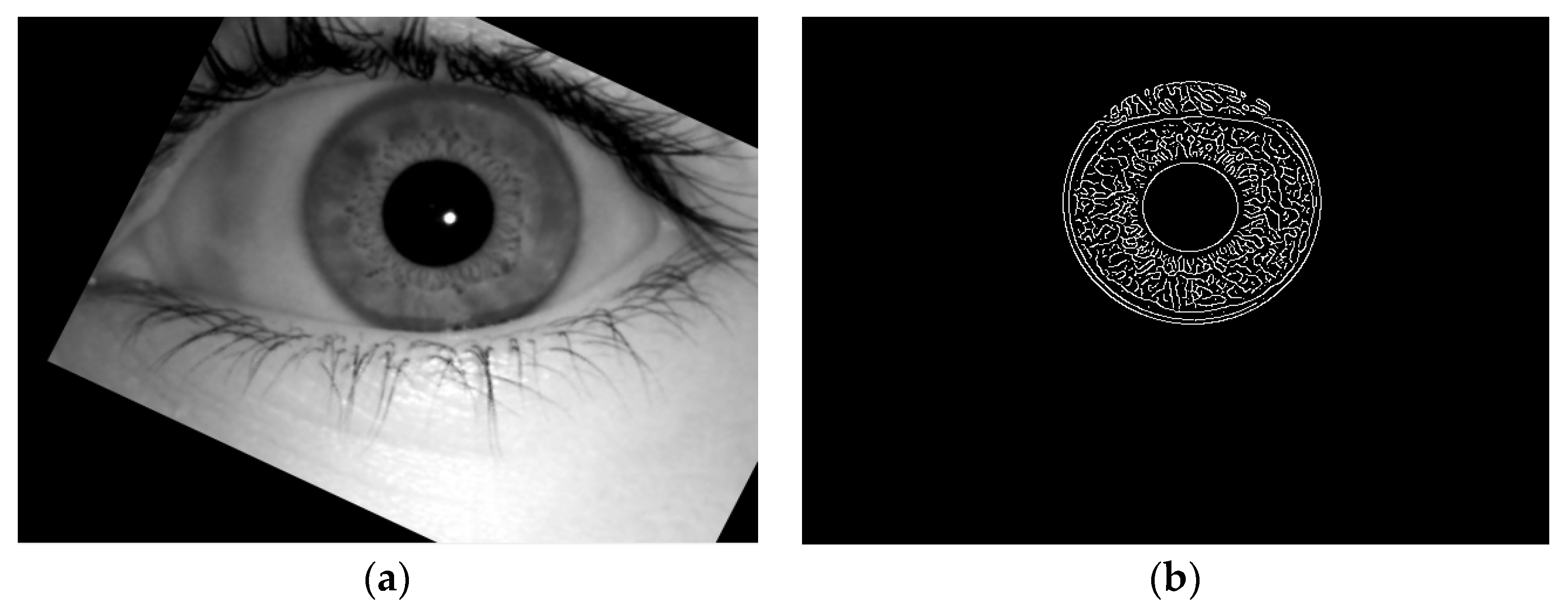
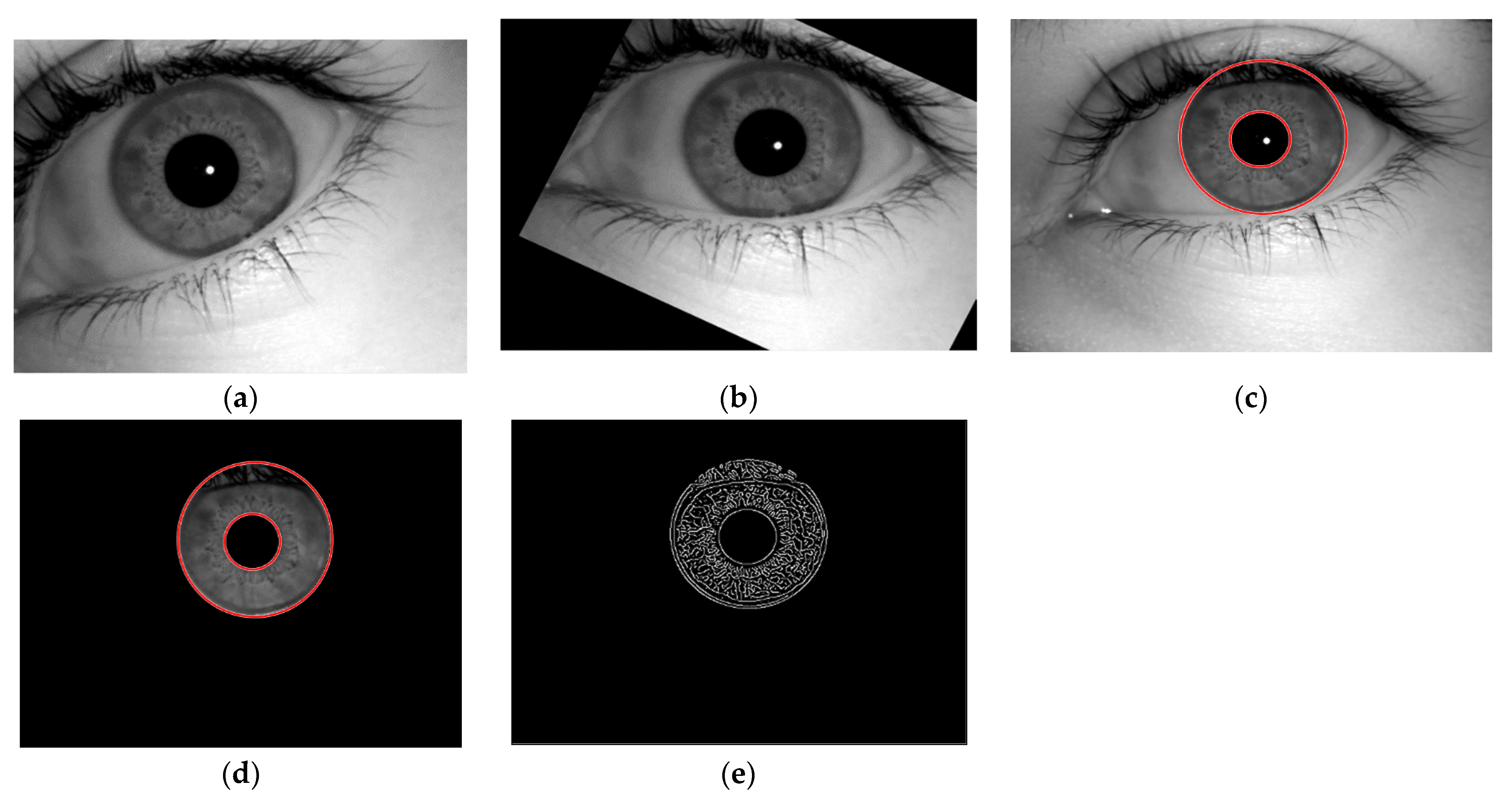
- Image registration aligns the input image with the reference image. In this method, we have taken an eye image as shown in Figure 11a, and the image registration was performed to align the image, as shown in Figure 11b. It is one of the major step that is performed to align the images for the analysis, and it reduce the problems of misalignment, rotation and scale.
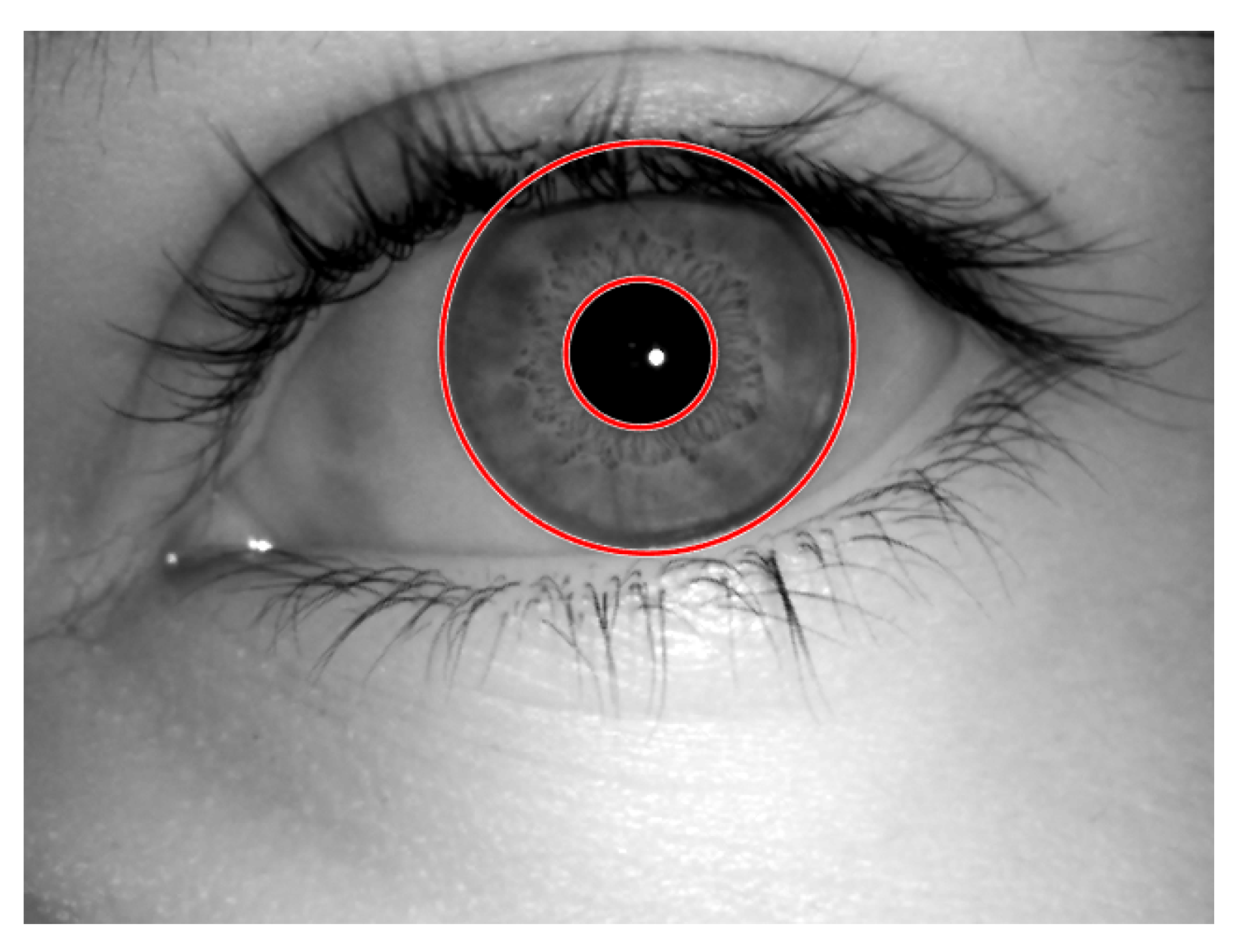
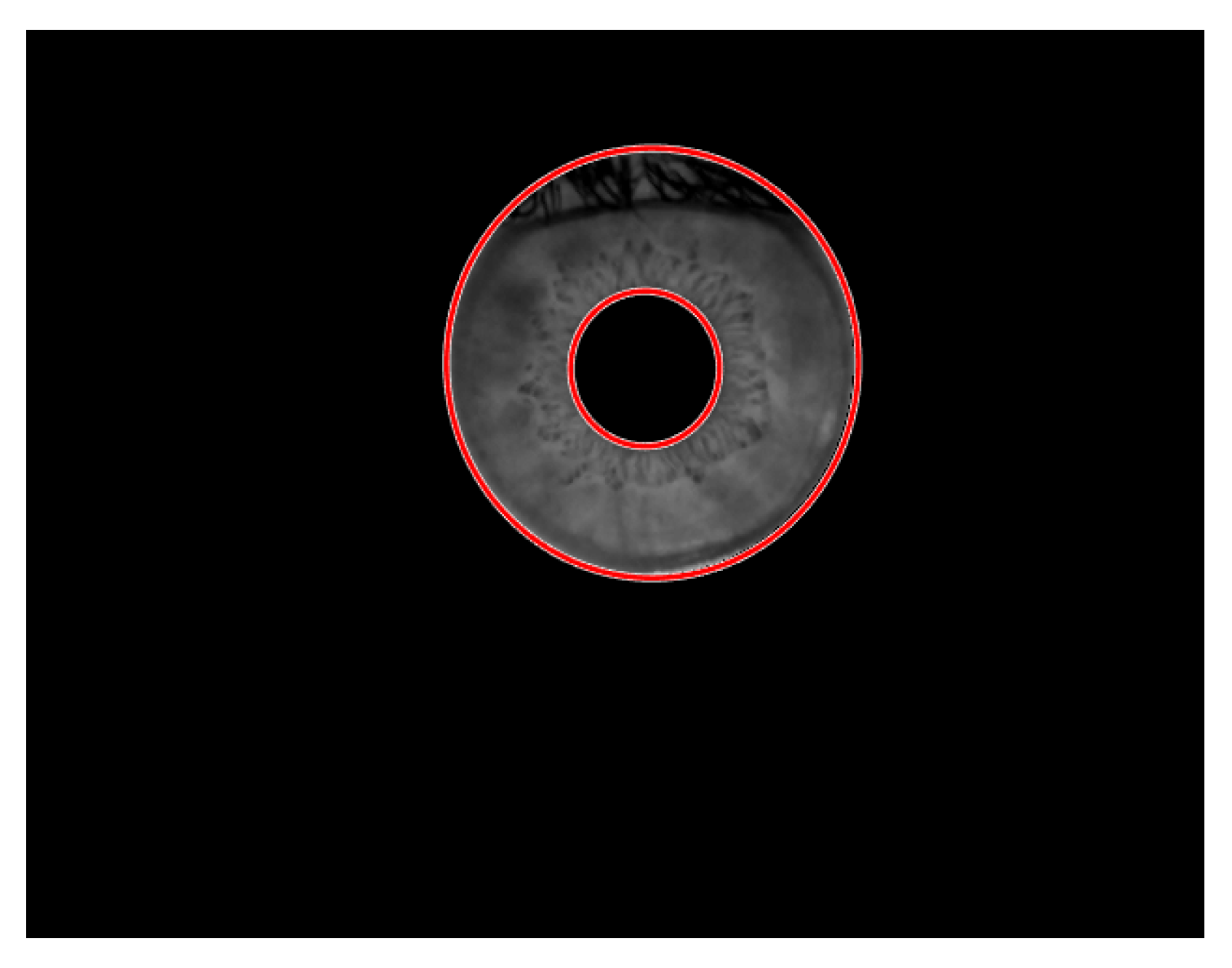
- Segmentation involves the circular portion detection and extraction from an eye image. Iris segmentation combines the technique of edge detection and Hough transform to detect the circular edges in the image. The segmented iris is shown in Figure 11c. It also involves the extraction of the iris region from an eye image, as shown in Figure 11d, which was evaluated by the combination of the circular Hough transform and masking methods, and this resulted in the circular iris portion extraction.
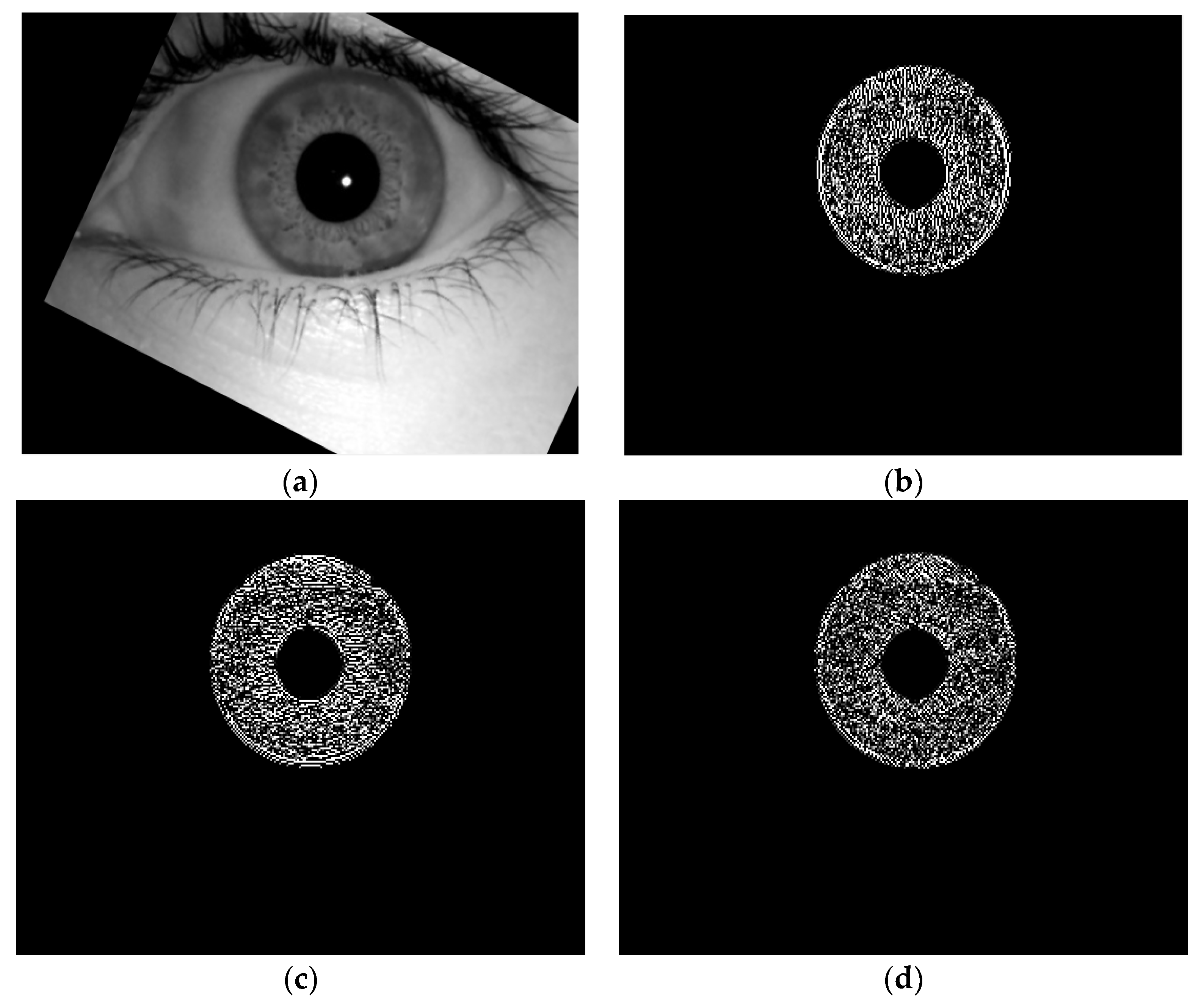
- Feature extraction was realized by using 2-Dimensional Discrete Wavelet transformation and canny edge detection. The 2D DWT results in the horizontal, vertical and diagonal components of the iris feature contain a lot of information which are difficult to handle, while on other hand, the edge detection technique provides all of the features in a single matrix. If we compared both of the techniques, 2D DWT takes more time to execute and it provides the desired results in three matrices, which will further take more time in matching, while the edge detection technique takes less time to provide the desired result, and it will be easy to find matched features, as it can be seen in Figure 11e. So, the results of the edge detection technique were employed for further processing.
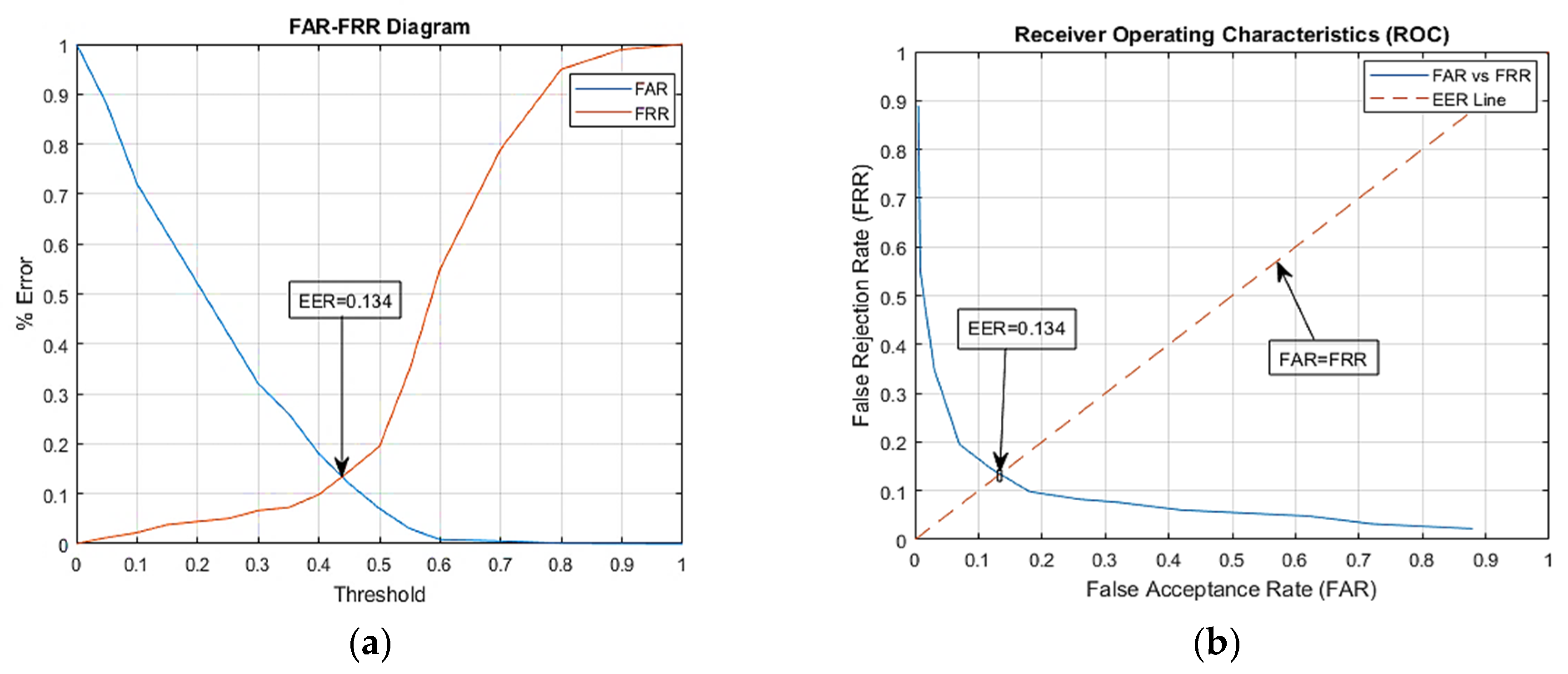
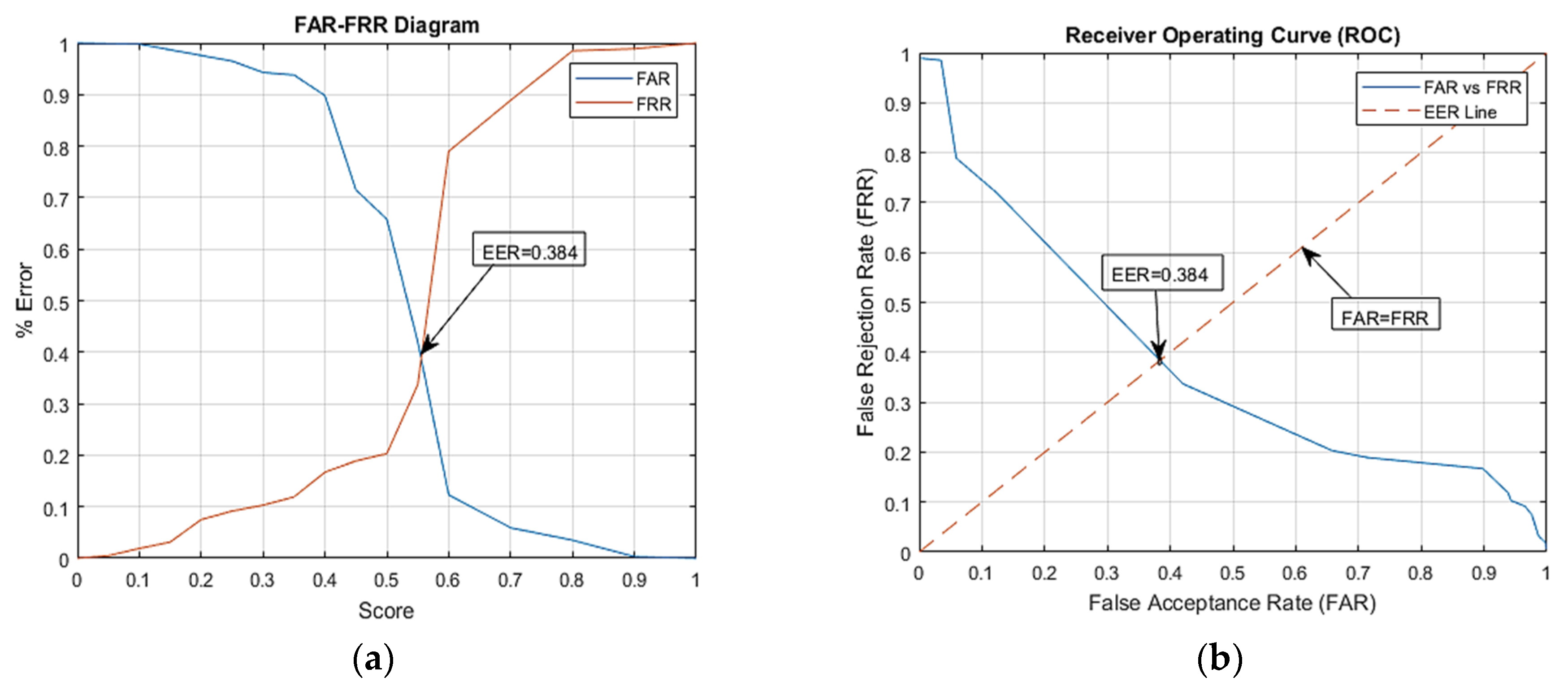
- Matching comprises of two different methods to avoid FAR and FRR as much as possible. These methods include the Hamming distance and absolute differencing method. First, the Hamming distance method was implemented to find the distance between the iris features, and if this distance is zero, then access is granted. This is difficult to achieve as occlusions such as eyelids, eyelashes, change under different lightening conditions and noise effect the features of an iris. So, threshold of 0.5 was adjusted to pass the barrier (gate), but still, the iris pattern was subjected to the absolute differencing method. This method checks the difference between the features of the two iris patterns, and it grant access or denies access to the barrier. If the Hamming distance is greater than 0.5 and there also exists absolute difference, the access to the system will be denied.
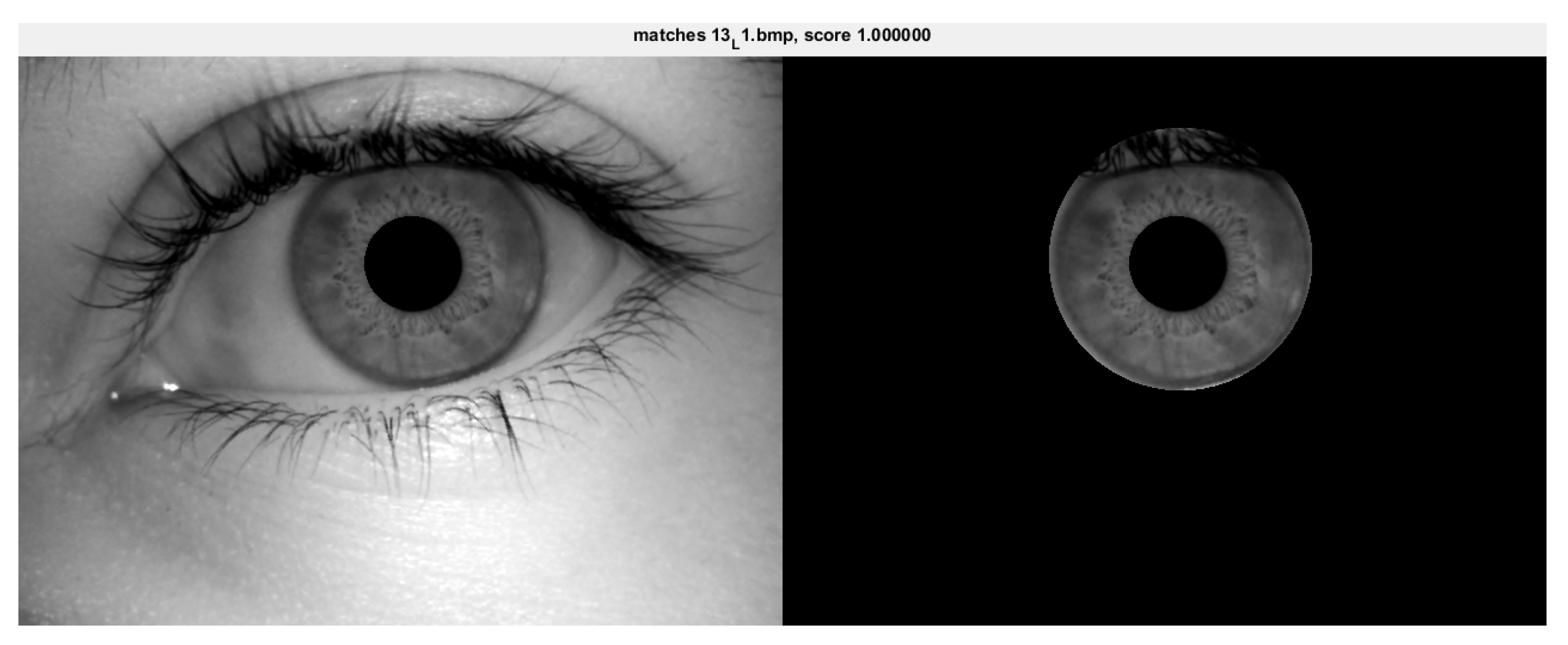
- Principal component analysis comprises all of the steps from reading an image to matching it. It consists of iris extraction from an eye image and calculating the mean Eigen values, Eigen vectors and similarity score of an image to compare them with those of the images in the database. The decision is based on the similarity score between two images as shown in Figure 9. The similarity score is 1 with ID 13_L1, which means its features are similar to a person having this ID. This method takes the surface features mainly, while the iris pattern has detailed information hidden which needs to be involved during processing.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, D. Biometrics technologies and applications. In Proceedings of the International Conference on Image and Graphics, Vancouver, BC, Canada, 10–13 September 2000. [Google Scholar]
- Daugman, J.G. High confidence visual recognition of persons by a test of statistical independence. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 1148–1161. [Google Scholar] [CrossRef]
- Sanchez-Avila, C.; Sanchez-Reillo, R. Two different approaches for iris recognition using Gabor filters and multiscale zero-crossing representation. Pattern Recognit. 2005, 38, 231–240. [Google Scholar] [CrossRef]
- Tisse, C.-L.; Martin, L.; Torres, L.; Robert, M. Person identification technique using human iris recognition. In Proceeding Vision Interface; Citeseer: Princeton, NJ, USA, 2002. [Google Scholar]
- Daugman, J.; Downing, C. Epigenetic Randomness, Complexity and Singularity of Human Iris patterns. Proc. R. Soc. Lond. Ser. B Biol. Sci. 2001, 268, 1737–1740. [Google Scholar] [CrossRef] [PubMed]
- Jeong, D.S.; Hwang, J.W.; Kang, B.J.; Park, K.R.; Won, C.S.; Park, D.-K.; Kim, J. A new iris segmentation method for non-ideal iris images. Image Vis. Comput. 2010, 28, 254–260. [Google Scholar] [CrossRef]
- Szewczyk, R.; Grabowski, K.; Napieralska, M.; Sankowski, W.; Zubert, M.; Napieralski, A. A reliable iris recognition algorithm based on reverse biorthogonal wavelet transform. Pattern Recognit. Lett. 2012, 33, 1019–1026. [Google Scholar] [CrossRef]
- Sreekala, P.; Jose, V.; Joseph, J.; Joseph, S. The human iris structure and its application in security system of car. In Proceedings of the 2012 IEEE International Conference on Engineering Education: Innovative Practices and Future Trends (AICERA), Kottayam, India, 19–21 July 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Jamaludin, S.; Zainal, N.; Zaki, W.M.D.W. Sub-iris Technique for Non-ideal Iris Recognition. Arab. J. Sci. Eng. 2018, 43, 7219–7228. [Google Scholar] [CrossRef]
- Daugman, J. Demodulation by complex-valued wavelets for stochastic pattern recognition. Int. J. Wavelets Multiresolution Inf. Process. 2003, 1, 1–17. [Google Scholar] [CrossRef]
- Daugman, J. Statistical richness of visual phase information: Update on recognizing persons by iris patterns. Int. J. Comput. Vis. 2001, 45, 25–38. [Google Scholar] [CrossRef]
- Daugman, J. How iris recognition works. In The Essential Guide to Image Processing; Elsevier: Amsterdam, The Netherlands, 2009; pp. 715–739. [Google Scholar]
- Daugman, J. New methods in iris recognition. IEEE Trans. Syst. Man Cybern. Part B 2007, 37, 1167–1175. [Google Scholar] [CrossRef]
- Daugman, J. Information theory and the iriscode. IEEE Trans. Inf. Forensics Secur. 2015, 11, 400–409. [Google Scholar] [CrossRef]
- Wildes, R.P. Iris recognition: An emerging biometric technology. Proc. IEEE 1997, 85, 1348–1363. [Google Scholar] [CrossRef]
- Boles, W.W.; Boashash, B. A human identification technique using images of the iris and wavelet transform. IEEE Trans. Signal Process. 1998, 46, 1185–1188. [Google Scholar] [CrossRef]
- Zhu, Y.; Tan, T.; Wang, Y. Biometric personal identification based on iris patterns. In Proceedings of the 15th International Conference on Pattern Recognition. ICPR-2000, Barcelona, Spain, 3–7 September 2000; IEEE: Piscataway, NJ, USA, 2000. [Google Scholar]
- Ma, L.; Wang, Y.; Tan, T. Iris recognition using circular symmetric filters. In Object Recognition Supported by User Interaction for Service Robots; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar]
- Ma, L.; Tan, T.; Wang, Y.; Zhang, D. Efficient iris recognition by characterizing key local variations. IEEE Trans. Image Process. 2004, 13, 739–750. [Google Scholar] [CrossRef]
- He, Z.; Tan, T.; Sun, Z.; Qiu, X. Toward accurate and fast iris segmentation for iris biometrics. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 31, 1670–1684. [Google Scholar]
- Sun, Z.; Tan, T. Ordinal measures for iris recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 31, 2211–2226. [Google Scholar]
- Patil, C.M.; Patilkulkarani, S. Iris feature extraction for personal identification using lifting wavelet transform. In Proceedings of the 2009 International Conference on Advances in Computing, Control, and Telecommunication Technologies, Bangalore, India, 28–29 December 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Sundaram, R.M.; Dhara, B.C. Neural network based Iris recognition system using Haralick features. In Proceedings of the 2011 3rd International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Shin, K.Y.; Nam, G.P.; Jeong, D.S.; Cho, D.H.; Kang, B.J.; Park, K.R.; Kim, J. New iris recognition method for noisy iris images. Pattern Recognit. Lett. 2012, 33, 991–999. [Google Scholar] [CrossRef]
- Ismail, A.I.; Hali, S.; Farag, F.A. Efficient enhancement and matching for iris recognition using SURF. In Proceedings of the 2015 5th national symposium on information technology: Towards new smart world (NSITNSW), Riyadh, Saudi Arabia, 17–19 February 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Ali, H.S.; Ismail, A.I.; Farag, F.A.; El-Samie, F.E.A. Speeded up robust features for efficient iris recognition. Signal Image Video Process. 2016, 10, 1385–1391. [Google Scholar] [CrossRef]
- Kamble, U.R.; Waghmare, L. Person Identification Using Iris Recognition: CVPR_IRIS Database. In Proceedings of the International Conference on ISMAC in Computational Vision and Bio-Engineering, Palladam, India, 16–17 May 2018; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Dua, M.; Gupta, R.; Khari, M.; Crespo, R.G. Biometric iris recognition using radial basis function neural network. Soft Comput. 2019, 23, 11801–11815. [Google Scholar] [CrossRef]
- Labati, R.D.; Genovese, A.; Piuri, V.; Scotti, F. Iris segmentation: State of the art and innovative methods. In Cross Disciplinary Biometric Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 151–182. [Google Scholar]
- Rankin, D.M.; Scotney, B.W.; Morrow, P.J.; McDowell, D.R.; Pierscionek, B.K. Dynamic iris biometry: A technique for enhanced identification. BMC Res. Notes 2010, 3, 182. [Google Scholar] [CrossRef]
- Proença, H.; Alexandre, L.A. Iris segmentation methodology for non-cooperative recognition. IEE Proc.-Vis. Image Signal Process. 2006, 153, 199–205. [Google Scholar] [CrossRef]
- de Martin-Roche, D.; Sanchez-Avila, C.; Sanchez-Reillo, R. Iris recognition for biometric identification using dyadic wavelet transform zero-crossing. In Proceedings of the IEEE 35th Annual 2001 International Carnahan Conference on Security Technology (Cat. No. 01CH37186), London, UK, 16–19 October 2001; IEEE: Piscataway, NJ, USA, 2001. [Google Scholar]
- Sreecholpech, C.; Thainimit, S. A robust model-based iris segmentation. In Proceedings of the 2009 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Kanazawa, Japan, 7–9 December 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Puhan, N.B.; Sudha, N.; Kaushalram, A.S. Efficient segmentation technique for noisy frontal view iris images using Fourier spectral density. Signal Image Video Process. 2011, 5, 105–119. [Google Scholar] [CrossRef]
- Teo, C.C.; Ewe, H.T. An efficient one-dimensional fractal analysis for iris recognition. In Proceedings of the 13th WSCG International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision, Plzen-Bory, Czech Republic, 31 January–4 February 2005. [Google Scholar]
- Ad, S.; Sasikala, T.; Kumar, C.U. Edge Detection Algorithm and its application in the Geo-Spatial Technology. In Proceedings of the 2017 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Coimbatore, India, 14–16 December 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hafeez, H.; Zafar, M.N.; Abbas, C.A.; Elahi, H.; Ali, M.O. Real-Time Human Authentication System Based on Iris Recognition. Eng 2022, 3, 693-708. https://doi.org/10.3390/eng3040047
Hafeez H, Zafar MN, Abbas CA, Elahi H, Ali MO. Real-Time Human Authentication System Based on Iris Recognition. Eng. 2022; 3(4):693-708. https://doi.org/10.3390/eng3040047
Chicago/Turabian StyleHafeez, Huma, Muhammad Naeem Zafar, Ch Asad Abbas, Hassan Elahi, and Muhammad Osama Ali. 2022. "Real-Time Human Authentication System Based on Iris Recognition" Eng 3, no. 4: 693-708. https://doi.org/10.3390/eng3040047
APA StyleHafeez, H., Zafar, M. N., Abbas, C. A., Elahi, H., & Ali, M. O. (2022). Real-Time Human Authentication System Based on Iris Recognition. Eng, 3(4), 693-708. https://doi.org/10.3390/eng3040047