
A Dynamic Inverse Decoupling Control Method for Reducing Energy Consumption in a Quadcopter UAV


Abstract
1. Introduction
- Dynamic Inverse Feedback Controller Design: We designed a novel dynamic inverse feedback controller for the full dynamics of the quadrotor UAV, which can achieve dynamic decoupling of the UAV’s x/y/z channels.
- Integration of Initial and Terminal Conditions: During continuous and safe flight control, we incorporate initial and terminal conditions that affect the optimality of the desired dynamic design of the x/y/z channels, transforming the energy consumption reduction problem into a discussion of the dynamic synchronization and damping characteristics of the x/y/z channels.
- Significant Reduction in Energy Consumption: Compared to typical control methods, the designed dynamic inverse decoupling controller greatly reduces control energy consumption and offers convenient editability of the desired dynamics for each channel.
2. Methodology
2.1. Quadrotor UAV Dynamic Modeling
2.2. UAV Energy Consumption Model
2.2.1. Analysis of UAV Energy Consumption Model
2.2.2. Establishment of Drone Energy Consumption Model
2.3. Dynamic Inverse Decoupling Control Method
3. Results and Discussion
3.1. Simulation Environment
3.2. Simulation Parameters
3.3. Simulation Results and Discussion
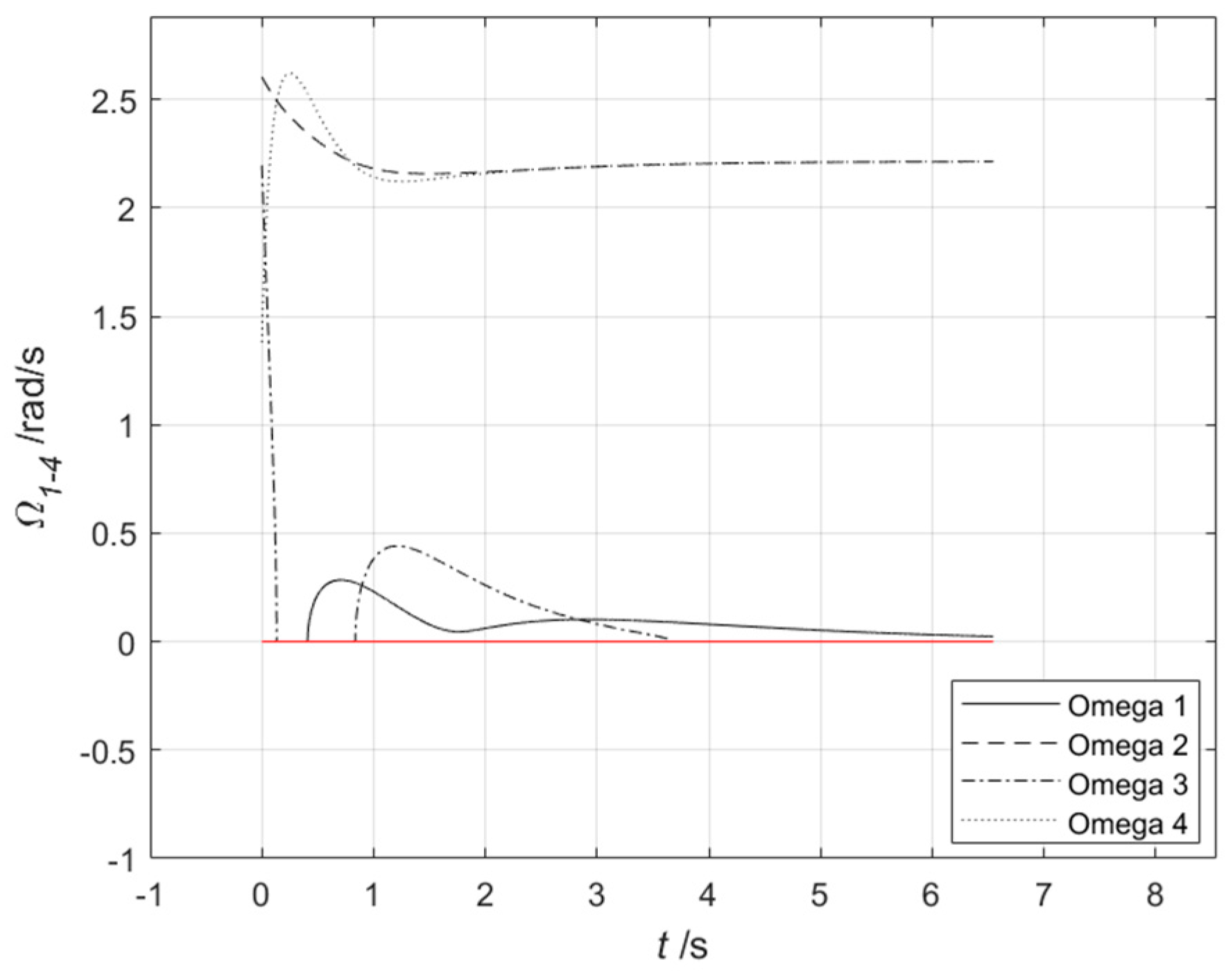
3.3.1. Simulation of the Effectiveness of Dynamic Inverse Decoupling Control
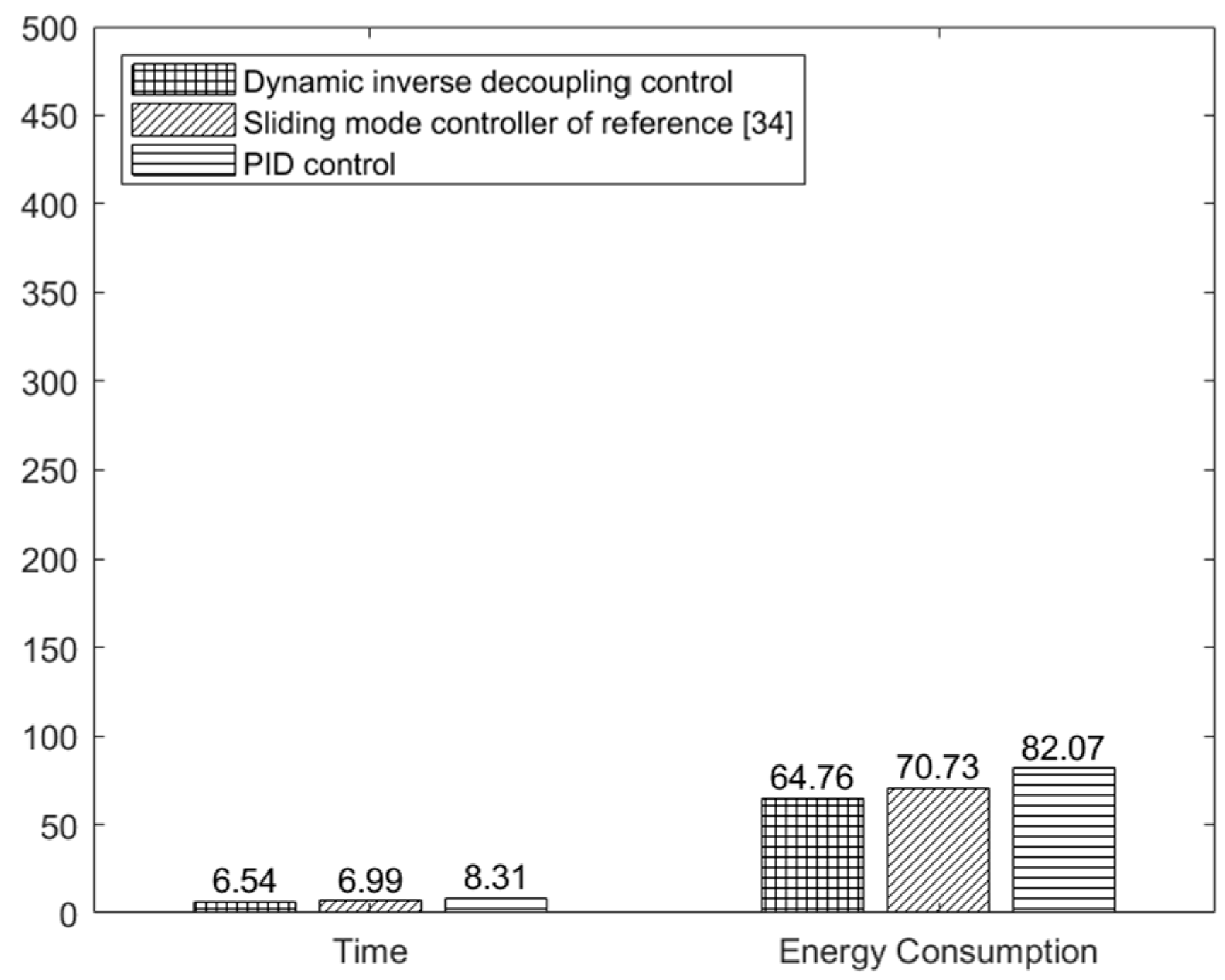
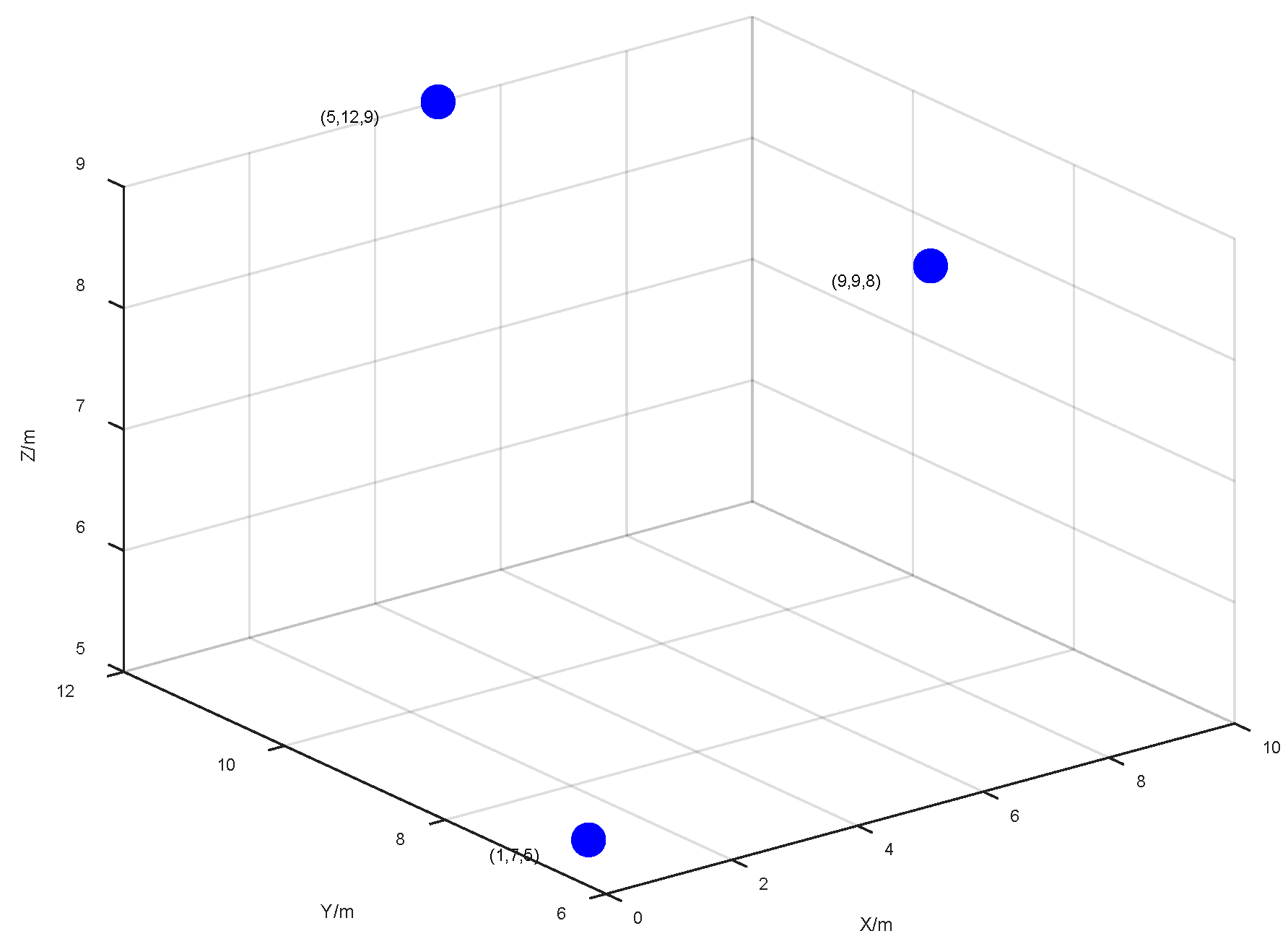
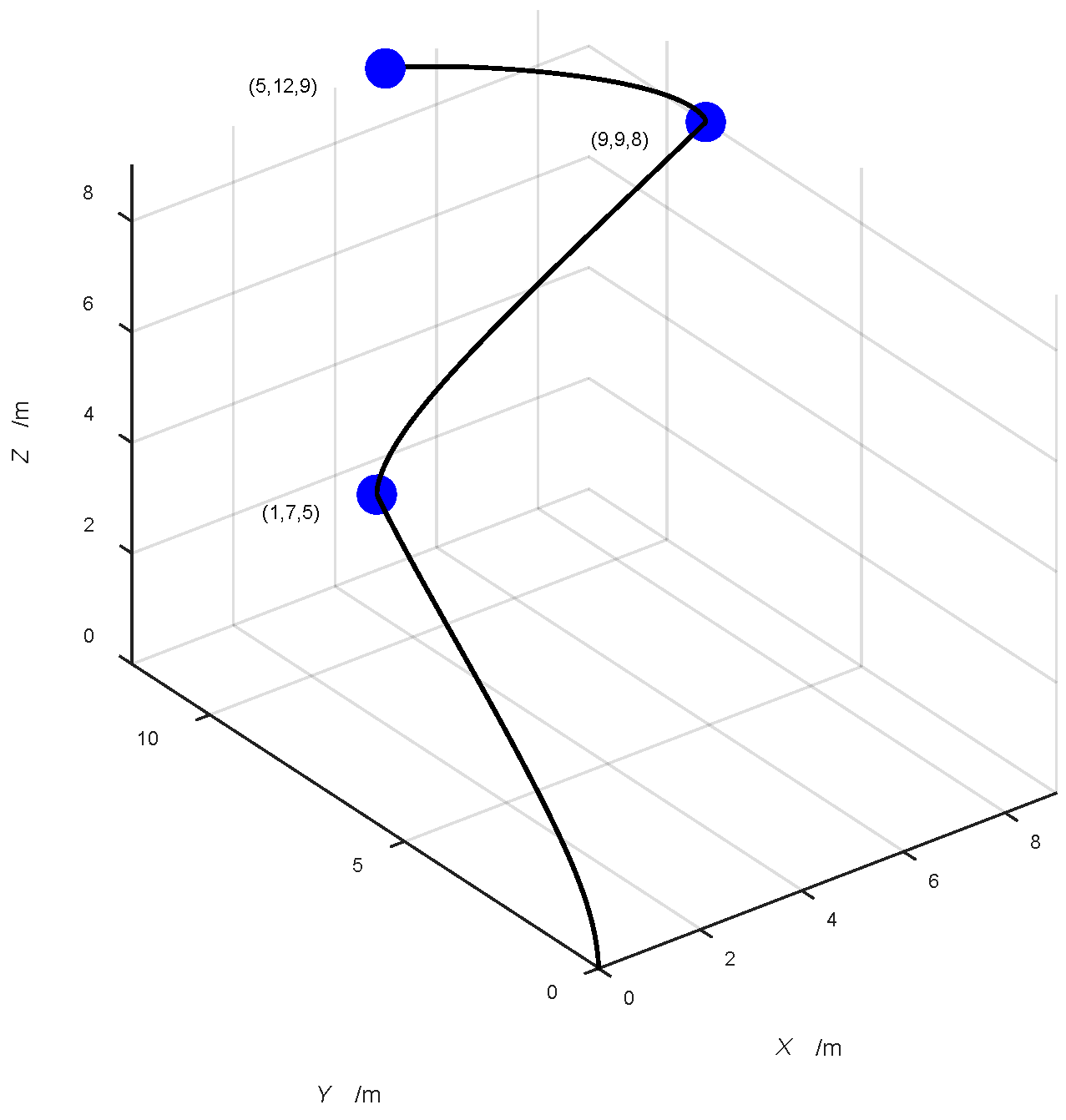
3.3.2. Simulation of the Effectiveness of Energy Optimization in Task Scenarios
3.4. Actual Flight Test
4. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, X.; Huang, G.; Wang, Z.; Zhao, B. Optics-driven drone. Sci. China Inf. Sci. 2024, 67, 124201. [Google Scholar] [CrossRef]
- Bartolomei, L.; Teixeira, L.; Chli, M. Fast Multi-UAV Decentralized Exploration of Forests. IEEE Robot. Autom. Lett. 2023, 8, 5576–5583. [Google Scholar] [CrossRef]
- Bassolillo, S.R.; D’Amato, E.; Notaro, I. A Consensus-Driven Distributed Moving Horizon Estimation Approach for Target Detection Within Unmanned Aerial Vehicle Formations in Rescue Operations. Drones 2025, 9, 127. [Google Scholar] [CrossRef]
- Jiang, C.X.; Yang, L.A.; Gao, Y.Q.; Zhao, J.; Hou, W.N.; Xu, F.M. An Intelligent 5G Unmanned Aerial Vehicle Path Optimization Algorithm for Offshore Wind Farm Inspection. Drones 2025, 9, 47. [Google Scholar] [CrossRef]
- Rad, S.S.; Zheng, Z.; Kheirollahi, R.; Mostafa, A.; Zhao, S.; Wang, Y.; Chevinly, J.; Nadi, E.; Bensala, T.; Zhang, H.; et al. Electromagnetic Interference on Unmanned Aerial Vehicles (UAVs): A Case Study of High Power Transmission Line Impacts. IEEE Trans. Transp. Electrif. 2025, 1. [Google Scholar] [CrossRef]
- Ahmed, M.; Soofi, A.A.; Raza, S.; Khan, F.; Ahmad, S.; Ullah, W.; Asif, M.; Xu, F.; Han, Z. Advancements in RIS-Assisted UAV for Empowering Multi-Access Edge Computing: A Survey. IEEE Internet Things J. 2025, 12, 6325–6346. [Google Scholar] [CrossRef]
- Cao, P.; Lei, L.; Cai, S.; Shen, G.; Liu, X.; Wang, X.; Zhang, L.; Zhou, L.; Guizani, M. Computational Intelligence Algorithms for UAV Swarm Networking and Collaboration: A Comprehensive Survey and Future Directions. IEEE Commun. Surv. Tutor. 2024, 26, 2684–2728. [Google Scholar] [CrossRef]
- Xu, S.; Zou, N.; He, Q.; He, X.; Li, K.; Cheng, M.; Liu, K. Design and Application Research of a UAV-Based Road Illuminance Measurement System. Automation 2024, 5, 407–431. [Google Scholar] [CrossRef]
- Lang, M.; Antsov, M.; Mumma, A.; Suitso, I.; Kuusk, A.; Piip, K. Comparison of forest canopy gap fraction measurements from drone-based video frames, below-canopy hemispherical photography, and airborne laser scanning. Eur. J. Remote Sens. 2025, 58, 2456629. [Google Scholar] [CrossRef]
- Qu, H.; Zheng, C.; Ji, H.; Barai, K.; Zhang, Y.-J. A fast and efficient approach to estimate wild blueberry yield using machine learning with drone photography: Flight altitude, sampling method and model effects. Comput. Electron. Agric. 2024, 216, 108543. [Google Scholar] [CrossRef]
- Ri, S.; Ye, J.; Xia, P.; Toyama, N.; Ogura, N.; Shiotani, T. Bridge deflection measurement by drone aerial photography using the sampling moiré method. In Proceedings of the International Conference on Optical and Photonic Engineering (icOPEN 2023), Singapore, 15 February 2024; pp. 168–171. [Google Scholar]
- Gao, J.; Wang, Q.; Li, Z.; Zhang, X.; Hu, Y.; Han, Q.; Pan, Y. Toward Efficient Urban Emergency Response Using UAVs Riding Crowdsourced Buses. IEEE Internet Things J. 2024, 11, 22439–22455. [Google Scholar] [CrossRef]
- De Lucia, L.; Palazzi, C.E.; Vegni, A.M. ENSING: Energy saving based data transmission in Internet of Drones for 3D connectivity in 6G networks. Ad Hoc Netw. 2023, 149, 103211. [Google Scholar] [CrossRef]
- Cariou, C.; Moiroux-Arvis, L.; Bendali, F.; Mailfert, J. Optimal route planning of an Unmanned Aerial Vehicle for data collection of agricultural sensors. In Proceedings of the IEEE INFOCOM 2024-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Vancouver, BC, Canada, 20 May 2024; pp. 1–6. [Google Scholar]
- Wu, Y.; Yin, H.; Chen, X.; Zhang, M. Multicircuit Route Planning for UAVs Performing the Terrain Coverage Task. IEEE Internet Things J. 2024, 11, 23765–23779. [Google Scholar] [CrossRef]
- Alyassi, R.; Khonji, M.; Karapetyan, A.; Chau, S.C.K.; Elbassioni, K.; Tseng, C.M. Autonomous Recharging and Flight Mission Planning for Battery-Operated Autonomous Drones. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1034–1046. [Google Scholar] [CrossRef]
- Wan, P.; Wang, S.; Xu, G.; Long, Y.; Hu, R. Hybrid Heuristic-Based Multi-UAV Route Planning for Time-Dependent Data Collection. IEEE Internet Things J. 2024, 11, 24134–24147. [Google Scholar] [CrossRef]
- Wang, X.; Ma, T.; Zhang, L.; Qiao, N.; Xue, P.; Fu, J. Multi-Phase Trajectory Planning for Wind Energy Harvesting in Air-Launched UAV Swarm Rendezvous and Formation Flight. Drones 2024, 8, 709. [Google Scholar] [CrossRef]
- Hadid, S.; Boushaki, R.; Boumchedda, F.; Merad, S. Enhancing Quadcopter Autonomy: Implementing Advanced Control Strategies and Intelligent Trajectory Planning. Automation 2024, 5, 151–175. [Google Scholar] [CrossRef]
- Perrusquia, A.; Guo, W. Reservoir Computing for Drone Trajectory Intent Prediction: A Physics Informed Approach. IEEE Trans. Cybern. 2024, 54, 4939–4948. [Google Scholar] [CrossRef]
- Zhuang, X.; Li, D.; Wang, Y.; Liu, X.; Li, H. Optimization of high-speed fixed-wing UAV penetration strategy based on deep reinforcement learning. Aerosp. Sci. Technol. 2024, 148, 109089. [Google Scholar] [CrossRef]
- Carvajal, C.P.; Andaluz, V.H.; Varela-Aldás, J.; Roberti, F.; Del-Valle-Soto, C.; Carelli, R. Visual Servoing Using Sliding-Mode Control with Dynamic Compensation for UAVs’ Tracking of Moving Targets. Drones 2024, 8, 730. [Google Scholar] [CrossRef]
- Kumar, S.; Yesmin, A.; Sinha, A.; Guha, A. Adaptive Continuous Terminal Sliding Mode Control for Unmanned Aerial Vehicle. In Proceedings of the 2024 Tenth Indian Control Conference (ICC), Bhopal, India, 9–11 December 2024; pp. 262–267. [Google Scholar]
- Admas, Y.A.; Mitiku, H.M.; Salau, A.O.; Omeje, C.O.; Braide, S.L. Control of a fixed wing unmanned aerial vehicle using a higher-order sliding mode controller and non-linear PID controller. Sci. Rep. 2024, 14, 23139. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Miao, K.; He, Z.; Zhang, H.; Niu, Y. Fault-Tolerant Time-Varying Formation Trajectory Tracking Control for Multi-Agent Systems with Time Delays and Semi-Markov Switching Topologies. Drones 2024, 8, 778. [Google Scholar] [CrossRef]
- Lee, B.; Hyun, D.; Kim, J.; Lee, S.; Ban, J. Design of Robust H∞ Guaranteed Cost Controller of Quadrotor UAV for Set-Point Tracking. IEEE Access 2024, 12, 126074–126087. [Google Scholar] [CrossRef]
- Xing, S.; Zhang, X.; Tian, J.; Xie, C.; Chen, Z.; Sun, J. Morphing Quadrotors: Enhancing Versatility and Adaptability in Drone Applications—A Review. Drones 2024, 8, 762. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, M.; Li, H.; Chadli, M. Event-Triggered-Based Adaptive NN Cooperative Control of Six-Rotor UAVs With Finite-Time Prescribed Performance. IEEE Trans. Autom. Sci. Eng. 2024, 21, 1867–1877. [Google Scholar] [CrossRef]
- Liu, S.; Jiang, B.; Mao, Z.; Zhang, Y. Distributed adaptive event-triggered fault-tolerant cooperative control of multiple UAVs and UGVs under DoS attacks. IET Contr. Theory Appl. 2023, 18, 2296–2306. [Google Scholar] [CrossRef]
- Amertet, S.; Gebresenbet, G.; Alwan, H.M. Modeling of Unmanned Aerial Vehicles for Smart Agriculture Systems Using Hybrid Fuzzy PID Controllers. Appl. Sci. 2024, 14, 3458. [Google Scholar] [CrossRef]
- Tassanbi, A.; Ali Khan, A.; Kashkynbayev, A.; Shehab, E.; Duc Do, T.; Ali, M.H. Performance evaluation of developed controllers for unmanned aerial vehicles with reference camera. Meas. Control 2024, 2, 00202940241270863. [Google Scholar] [CrossRef]
- Zhao, H.; Fu, H.; Yang, F.; Qu, C.; Zhou, Y. Data-driven offline reinforcement learning approach for quadrotor’s motion and path planning. Chin. J. Aeronaut. 2024, 37, 386–397. [Google Scholar] [CrossRef]
- Yao, J.; Rafee Nekoo, S.; Xin, M. Approximate optimal control design for quadrotors: A computationally fast solution. Optim. Control Appl. Methods 2023, 45, 85–105. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zheng, E.H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 725–731. [Google Scholar] [CrossRef]
- Li, B.; Li, Q.; Zeng, Y.; Rong, Y.; Zhang, R. 3D Trajectory Optimization for Energy-Efficient UAV Communication: A Control Design Perspective. IEEE Trans. Wirel. Commun. 2022, 21, 4579–4593. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Specific Parameters |
|---|---|
| battery | 12 V (4 V × 3 sections) |
| bare weight | 1.8 kg |
| fixed load power | 100 W |
| Variable | Value | Units |
|---|---|---|
| 2.0 | ||
| 1.25 | ||
| 2.2 | ||
| 0.01 | ||
| 0.012 | ||
| 1.0 | ||
| 1.0 | ||
| 2.0 | ||
| 5.0 | ||
| 9.8 |
| Variable | Value |
|---|---|
| 2.6 | |
| 2.6 | |
| 2.6 | |
| 2.6 | |
| 1.69 | |
| 1.69 | |
| 1.69 | |
| 1.69 | |
| 10.0 | |
| 10.0 | |
| 25.0 | |
| 25.0 |
| Variable | Value |
|---|---|
| 0.75 | |
| 1.5 | |
| 0.0 | |
| 15.0 | |
| 6.0 | |
| 1.5 | |
| 7.5 | |
| 3.0 | |
| 0.0 |
| Control Algorithm | Total Flight Energy Consumption |
|---|---|
| Dynamic inverse decoupling control | 150.9359 J |
| Sliding mode controller of reference [34] | 311.7295 J |
| PID control | 1500.9461 J |
| Control Algorithm | Remaining Power |
|---|---|
| Dynamic inverse decoupling control | 78.4% |
| Sliding mode controller of reference [34] | 76.2% |
| PID control | 74.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, G.; Tian, K.; Sun, H.; Wang, Y.; Li, H. A Dynamic Inverse Decoupling Control Method for Reducing Energy Consumption in a Quadcopter UAV. Automation 2025, 6, 19. https://doi.org/10.3390/automation6020019
Ma G, Tian K, Sun H, Wang Y, Li H. A Dynamic Inverse Decoupling Control Method for Reducing Energy Consumption in a Quadcopter UAV. Automation. 2025; 6(2):19. https://doi.org/10.3390/automation6020019
Chicago/Turabian StyleMa, Guoxin, Kang Tian, Hongbo Sun, Yongyan Wang, and Haitao Li. 2025. "A Dynamic Inverse Decoupling Control Method for Reducing Energy Consumption in a Quadcopter UAV" Automation 6, no. 2: 19. https://doi.org/10.3390/automation6020019
APA StyleMa, G., Tian, K., Sun, H., Wang, Y., & Li, H. (2025). A Dynamic Inverse Decoupling Control Method for Reducing Energy Consumption in a Quadcopter UAV. Automation, 6(2), 19. https://doi.org/10.3390/automation6020019