
Task Location to Improve Human–Robot Cooperation: A Condition Number-Based Approach


Abstract
:1. Introduction
1.1. Related Work
1.2. The Main Contribution
2. The Condition Number-Based Approach
- (1)
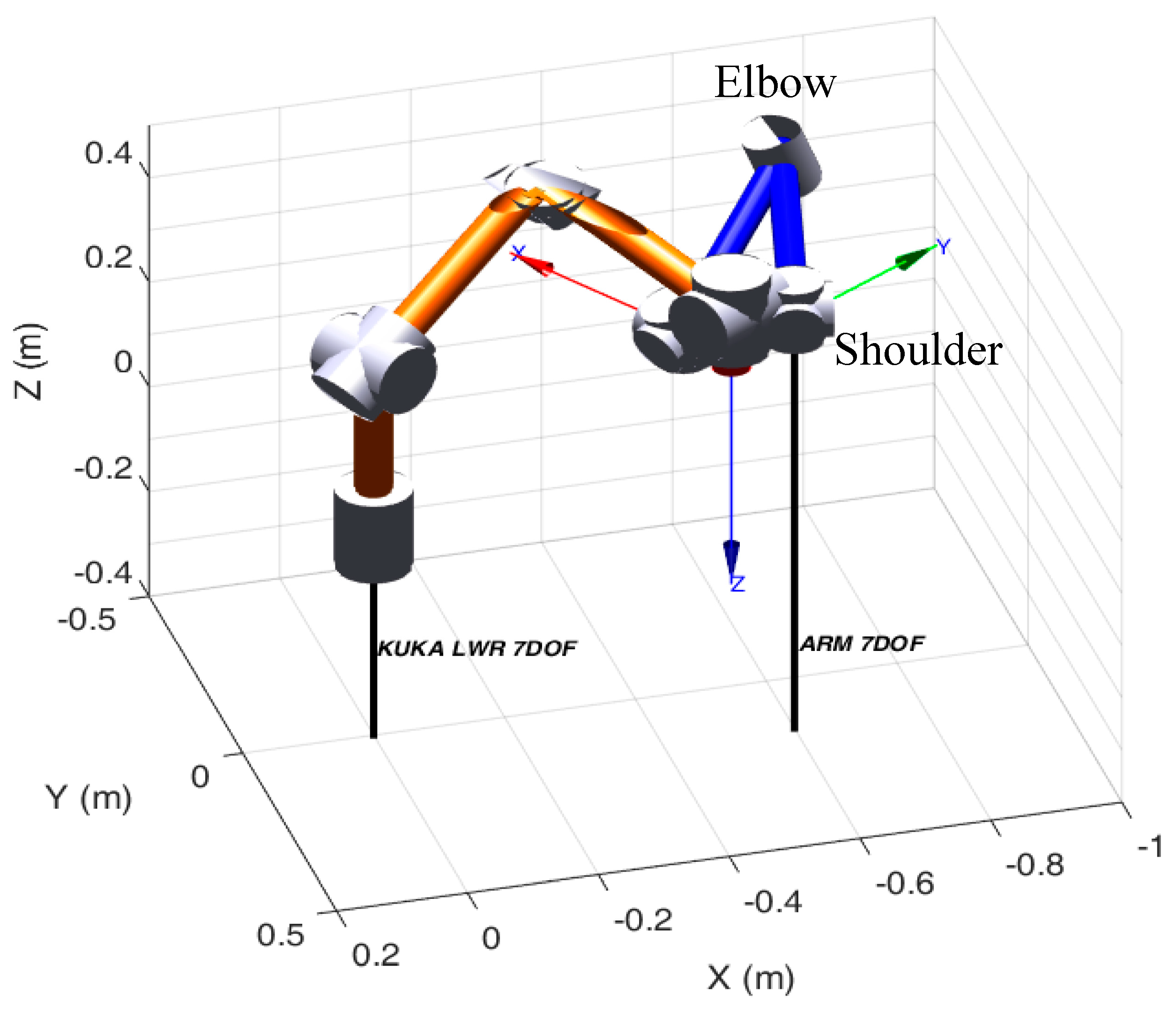
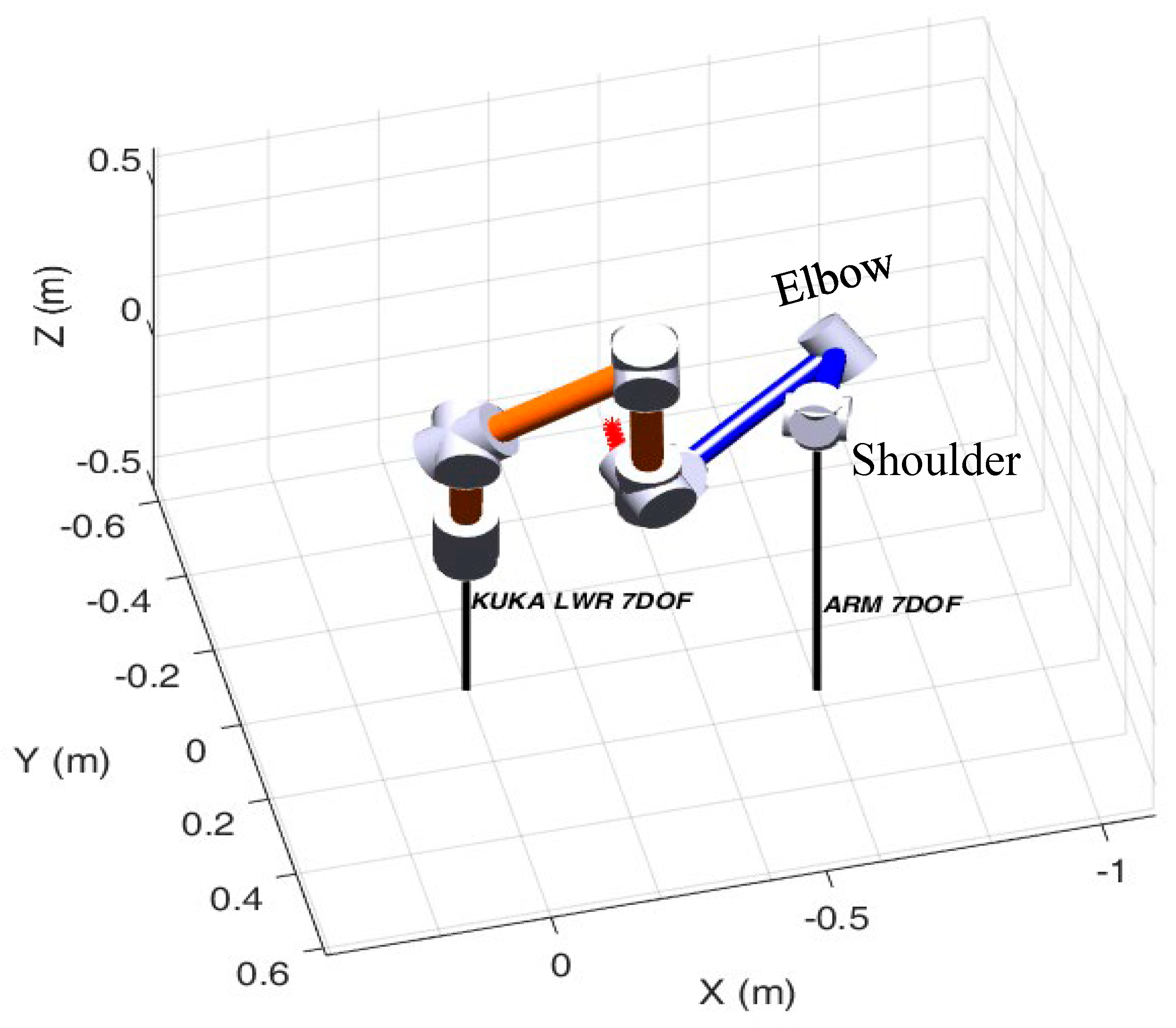
- Modeling the human arm and manipulator in a co-manipulation task as a CKC.
- (2)
- The suboptimal location of the task is determined.
- (3)
- Experimental evaluation of the proposed approach.
3. Modeling of the Closed Kinematic Chain—Step 1
4. Suboptimal Task Location Determination—Step 2
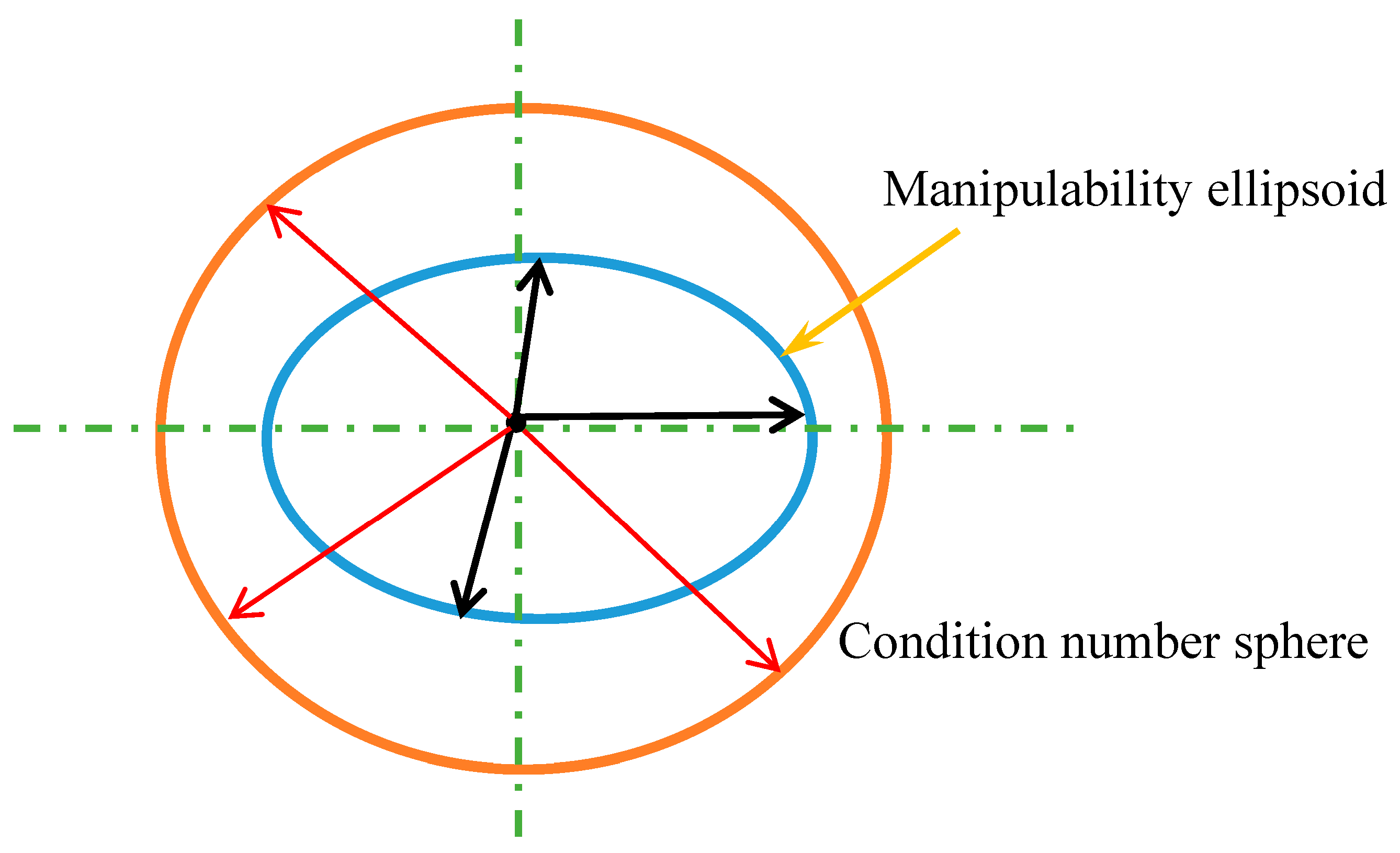
4.1. Justification of Using Condition Number
4.2. The Optimization of the Task Location
The Results from the Optimization Procedure
5. Experimental Evaluation of the Proposed Approach—Step 3
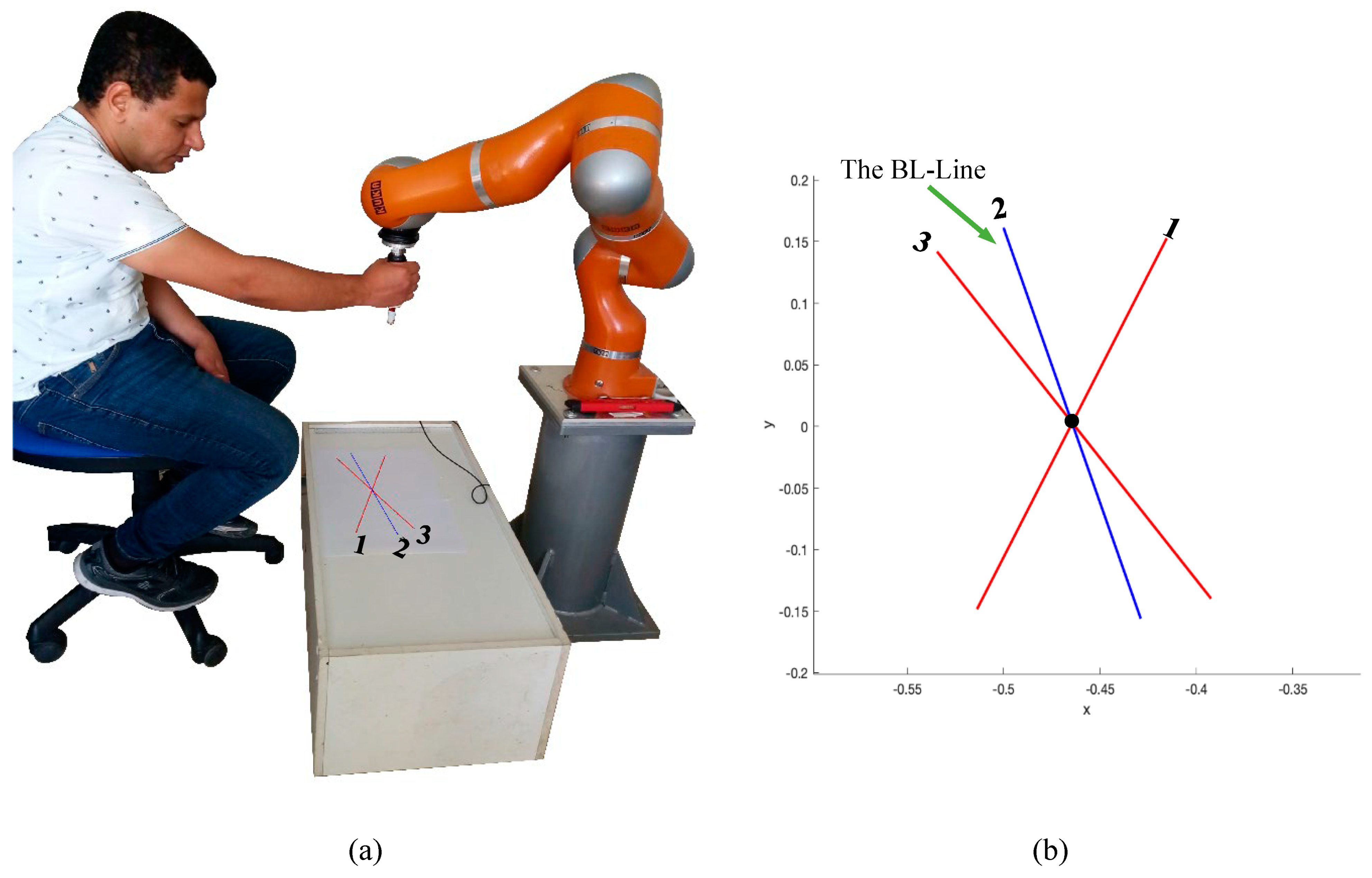
5.1. The Experimental Set-Up
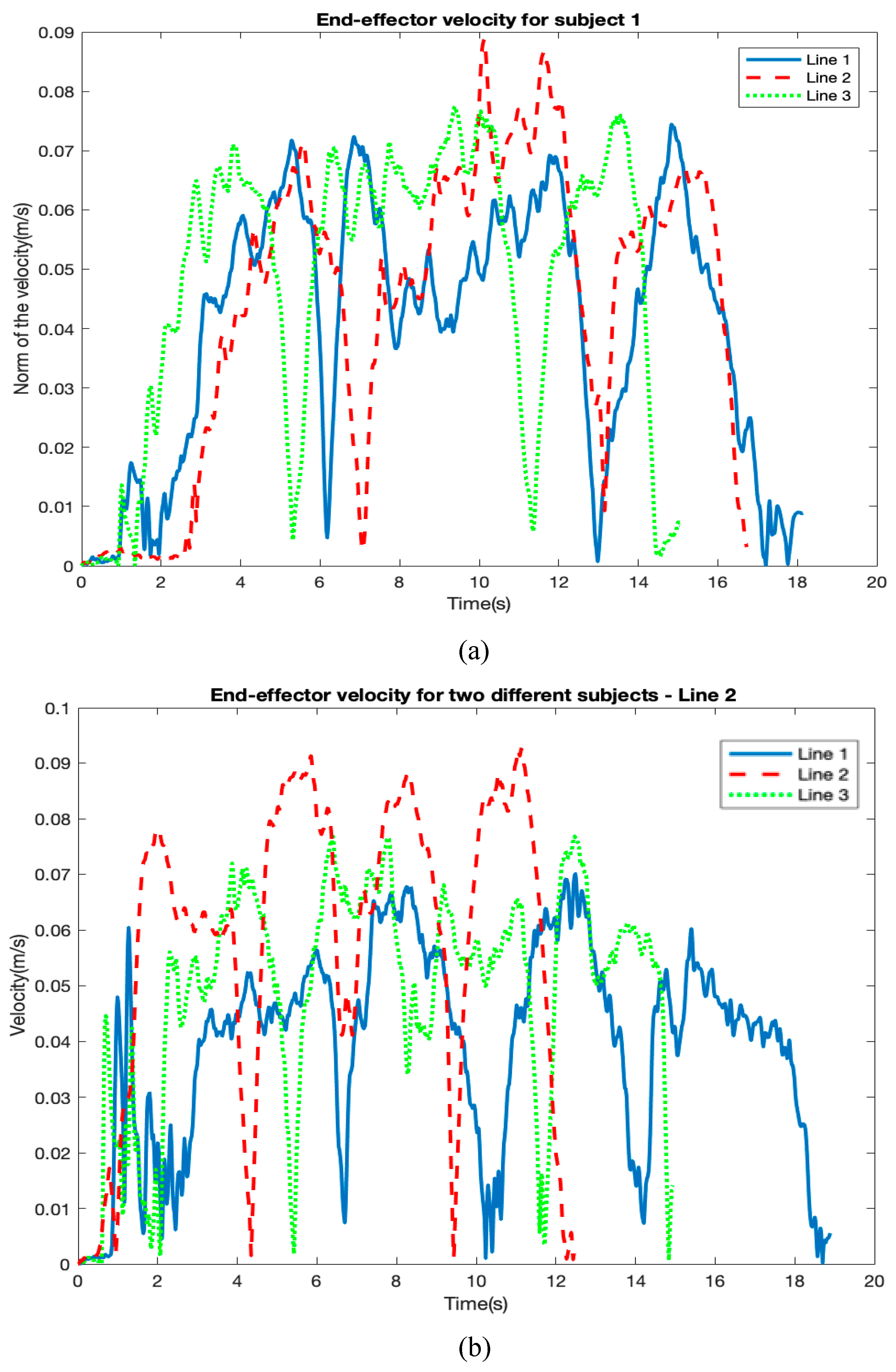
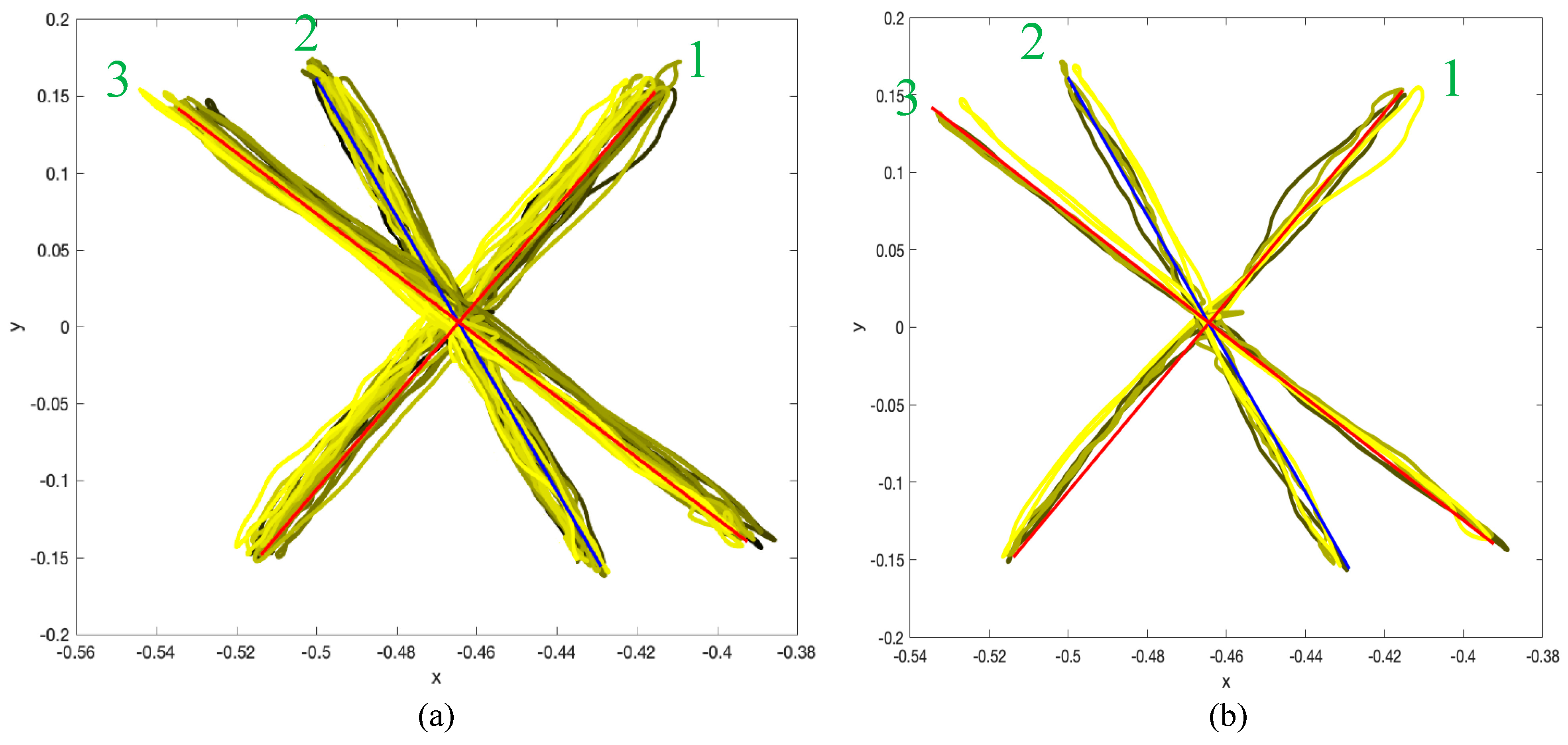
5.2. The Experimental Results
5.2.1. The Evaluation Criteria
- (1)
- The position error (distance discrepancy): It is defined as the absolute value of the difference between the straight-line segment and the actual position of the robot end-effector. The average/mean of the position error obtained by each subject is calculated, and then the mean value for the 15 subjects is calculated. Indeed, the position error expresses the achieved accuracy. In [56], the arc-length was used as the accuracy measure, and the smoothness by measuring the number of peaks in the trajectory was used for evaluating the precision in task execution.
- (2)
- The applied effort by the human operator to the robot handle during the movement: The effort is calculated as the integration of the applied forces over the travelled distance. The human effort in the direction by each subject is calculated as , whereas the effort in the direction by the subject is . Afterward, the total effort by each subject is calculated as . Finally, the mean value from the required efforts by the 15 subjects is obtained. In [56], the interaction force is used to show how much effort the user needed for task completion.
- (3)
- The task completion time required for completing the above specific movement: The task completion time for every subject is obtained, then the mean value for the 15 subjects is calculated and is the same criterion to the one used in [56].
- (4)
- The oscillations during the movement: The 1D Fourier Transform of the applied force by the subject is calculated while considering frequencies less than 100 Hz. The mean value of the frequencies for each subject is calculated, and then the mean value for the 15 subjects is obtained. This criterion shows the quality of the motion, and it is similar to the force smoothness as well as the trajectory smoothness criteria measured in [56].
5.2.2. The Results from Measurements
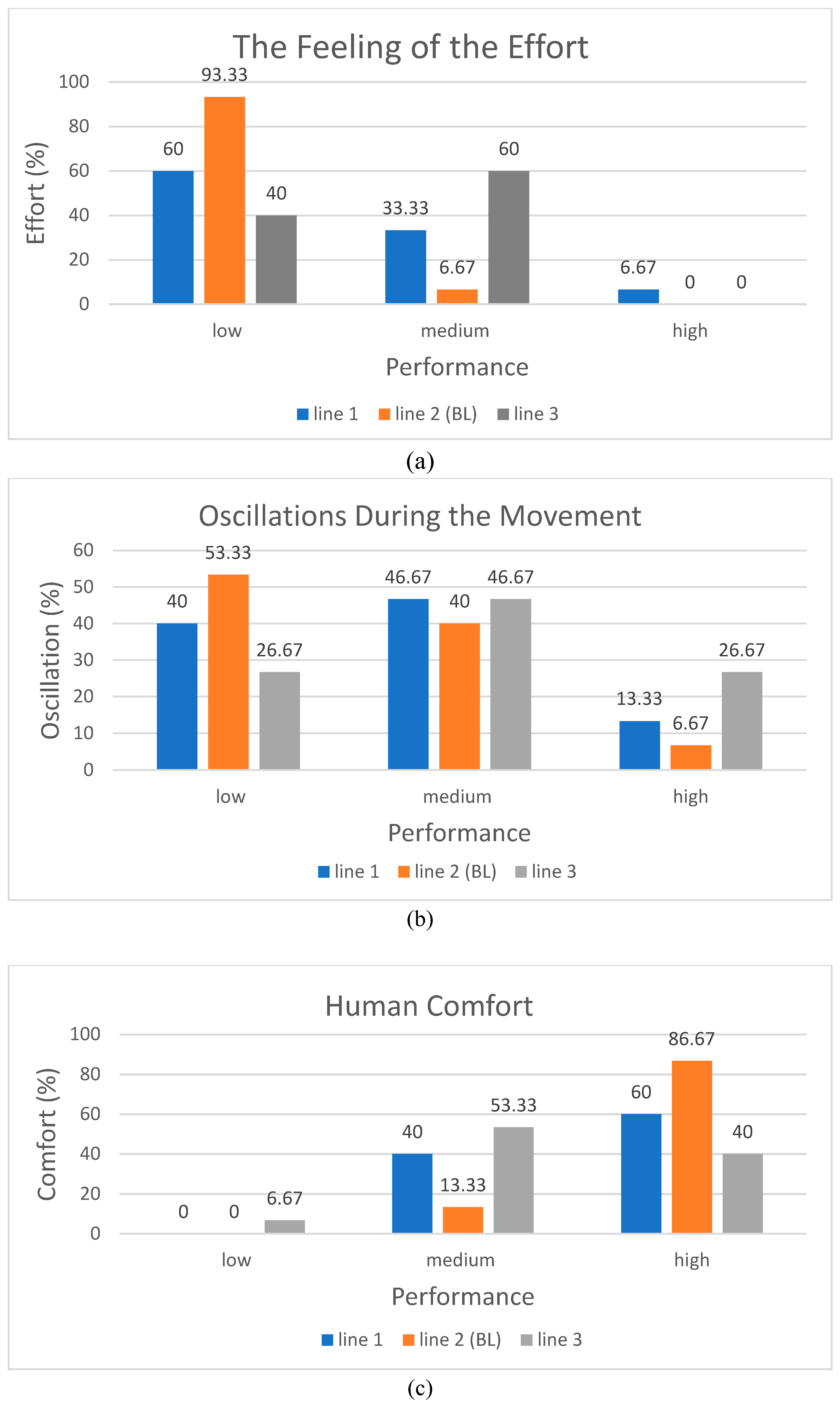
5.2.3. The Subjective Results
5.3. Discussions of the Results
6. Conclusions and Future Work
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HRI | Human–robot interaction |
| HRC | Human–robot cooperation |
| LWR | Lightweight robot |
| DOF | Degree of freedom |
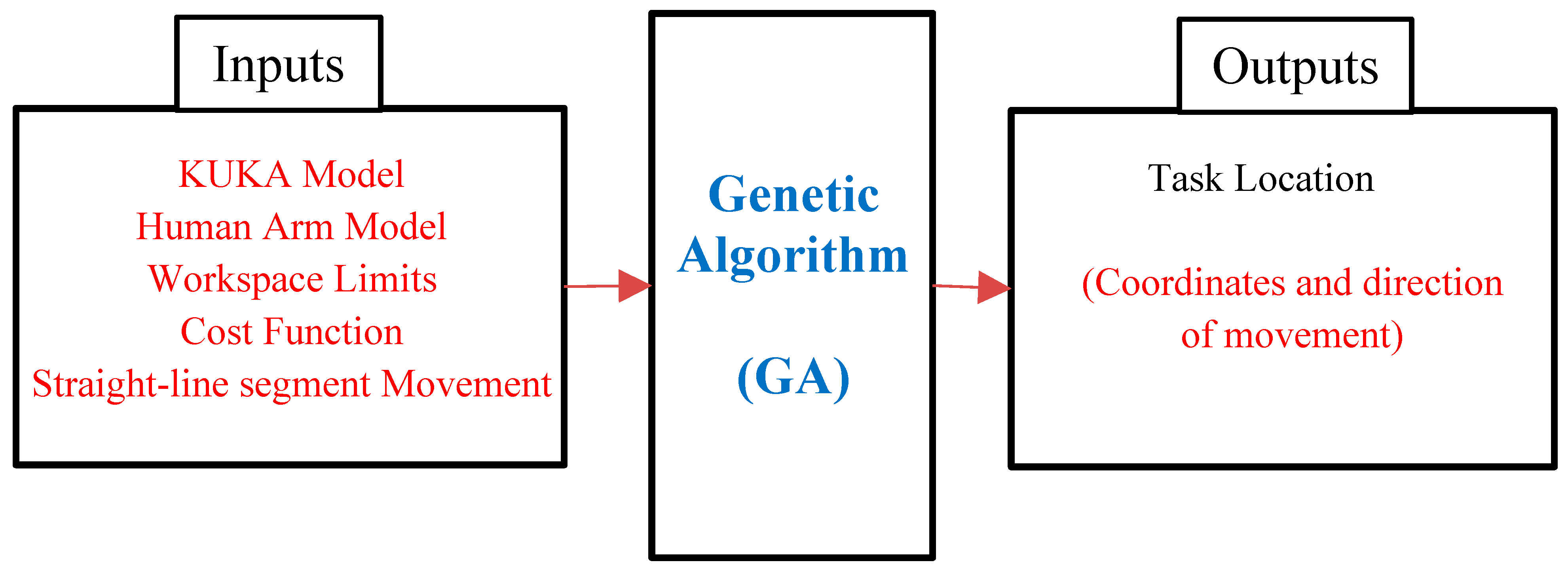
| GA | Genetic algorithms |
| DH | Denavit–Hartenberg |
| Condition number | |
| MSV | Minimum singular value |
| Objective function | |
| CKC | Closed kinematic chain |
| BL-line | Best location line |
Appendix A. Kinematics of the Closed Kinematic Chain
Appendix A.1. The Transformation Matrices
- (1)
- The human arm:
- (2)
- The KUKA robot:
Appendix A.2. The Jacobian Matrix
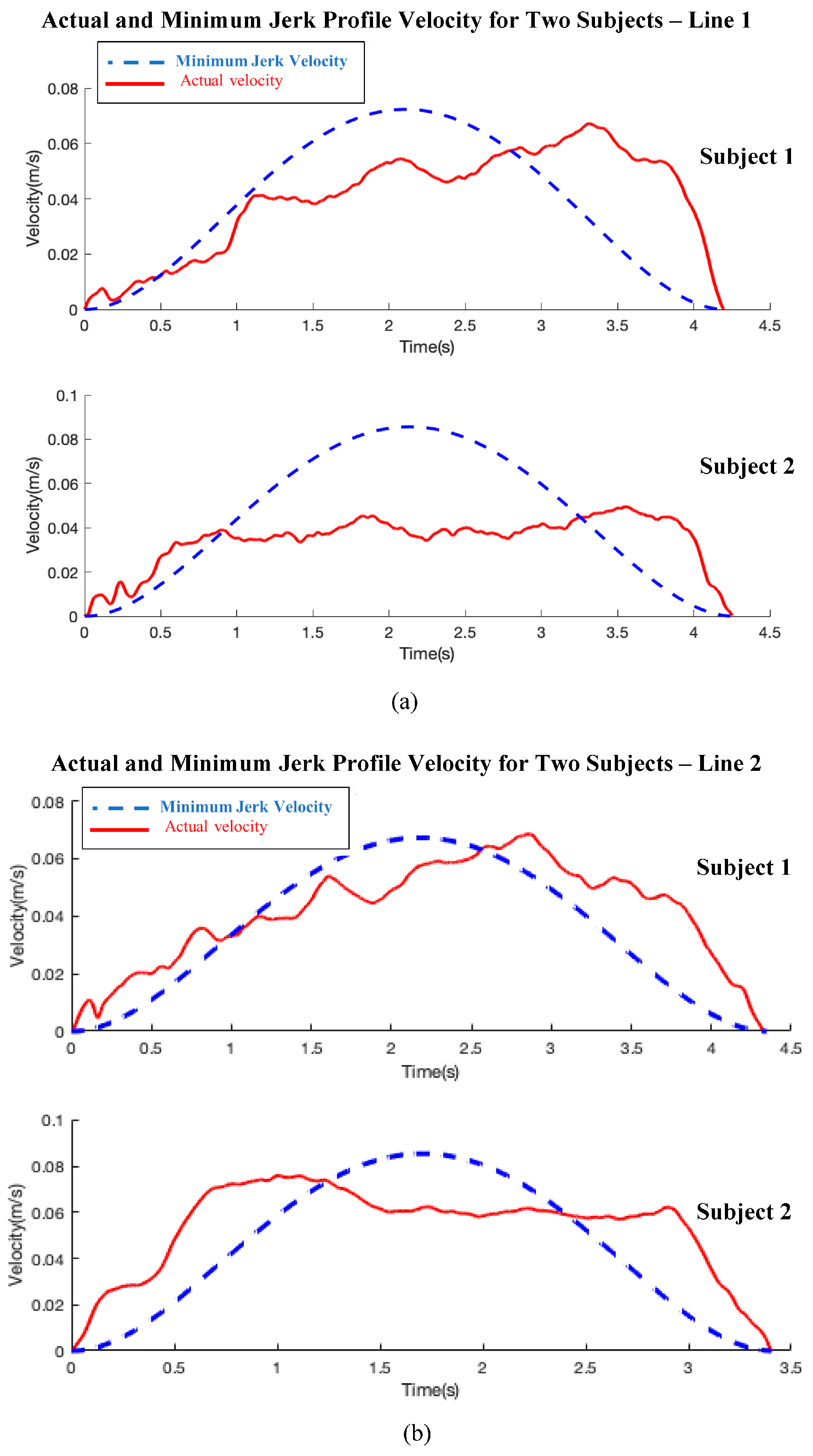
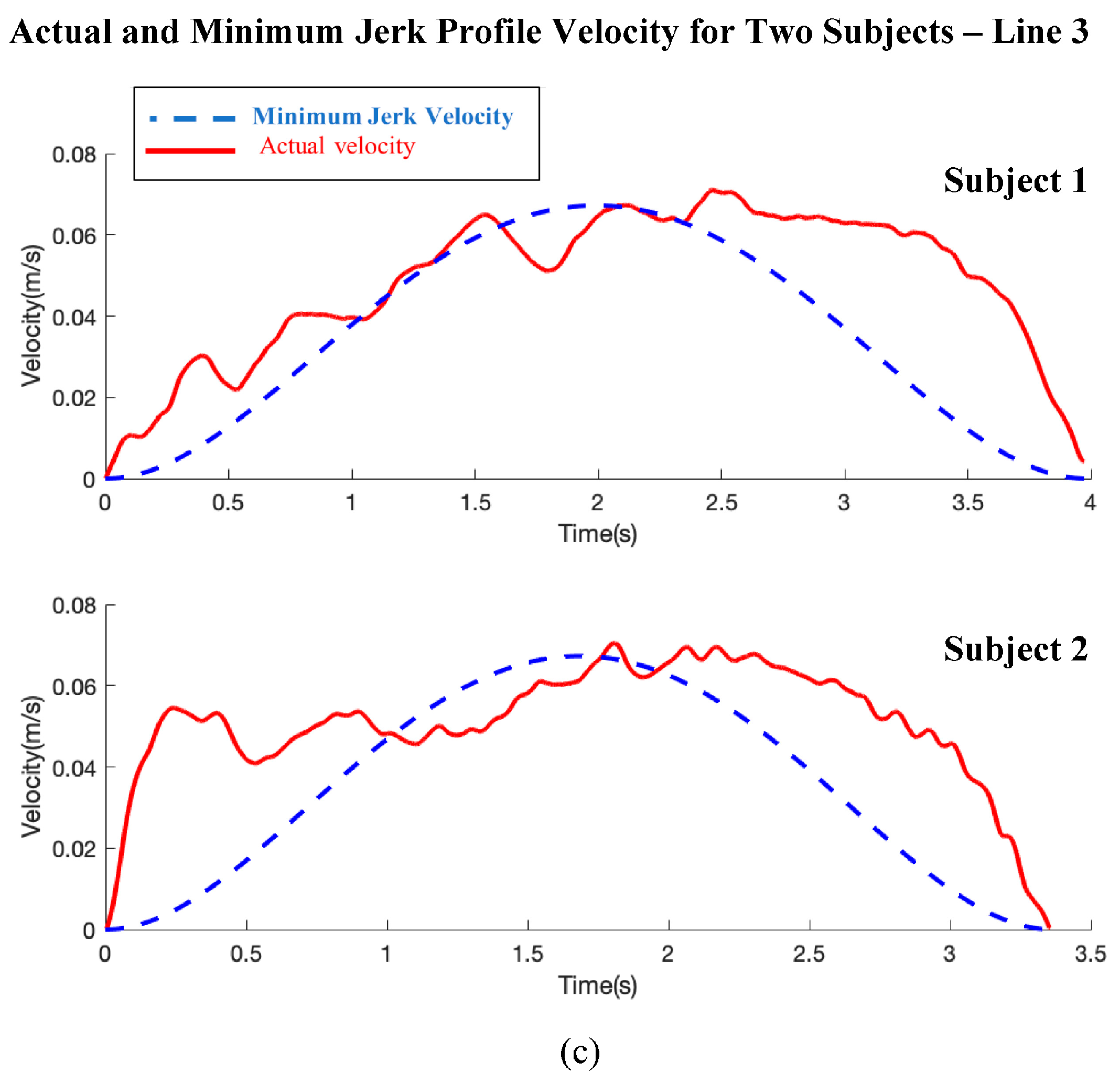
Appendix B. The Comparison between the Actual Velocity of the Robot End-Effector and the Velocity of the Minimum Jerk Trajectory Profile

References
- Sharkawy, A.-N.; Koustoumpardis, P.N. Human–Robot Interaction: A Review and Analysis on Variable Admittance Control, Safety, and Perspectives. Machines 2022, 10, 591. [Google Scholar] [CrossRef]
- Sharkawy, A.-N. Intelligent Control and Impedance Adjustment for Efficient Human-Robot Cooperation. Ph.D. Thesis, University of Patras, Patras, Greece, 2020. [Google Scholar] [CrossRef]
- Wang, B.; Hu, S.J.; Sun, L.; Freiheit, T. Intelligent welding system technologies: State-of-the-art review and perspectives. J. Manuf. Syst. 2020, 56, 373–391. [Google Scholar] [CrossRef]
- Hord, S.M. Working Together: Cooperation or Collaboration; The University of Texas at Austin: Austin, TX, USA, 1981. Available online: https://files.eric.ed.gov/fulltext/ED226450.pdf (accessed on 25 February 2022).
- Vianello, L.; Gomes, W.; Maurice, P.; Aubry, A.; Ivaldi, S. Cooperation or collaboration? On a human-inspired impedance strategy in a human-robot co-manipulation task. HAL Open Sci. 2022. Available online: https://hal.science/hal-03589692 (accessed on 25 February 2022).
- Inkulu, A.K.; Bahubalendruni, M.V.A.R.; Dara, A.; SankaranarayanaSamy, K. Challenges and opportunities in human robot collaboration context of Industry 4.0—A state of the art review. Ind. Rob. 2022, 49, 226–239. [Google Scholar] [CrossRef]
- Michalos, G.; Karagiannis, P.; Makris, S.; Tokçalar, Ö.; Chryssolouris, G. Augmented Reality (AR) Applications for Supporting Human-robot Interactive Cooperation. Procedia CIRP 2016, 41, 370–375. [Google Scholar] [CrossRef]
- Klein, C.A.; Miklos, T.A. Spatial Robotic Isotropy. Int. J. Rob. Res. 1991, 10, 426–437. [Google Scholar] [CrossRef]
- Meulenbroek, R.G.J.; Thomassen, A.J.W.M. Stroke-direction preferences in drawing and handwriting. Hum. Mov. Sci. 1991, 10, 247–270. [Google Scholar] [CrossRef]
- Meulenbroek, R.G.J.; Thomassen, A.J.W.M. Effects of handedness and arm position on stroke-direction preferences in drawing. Psychol. Res. 1992, 54, 194–201. [Google Scholar] [CrossRef]
- Dounskaia, N.; Wang, W. A preferred pattern of joint coordination during arm movements with redundant degrees of freedom. J. Neurophysiol. 2014, 112, 1040–1053. [Google Scholar] [CrossRef] [PubMed]
- Dounskaia, N.; Goble, J.A. The role of vision, speed, and attention in overcoming directional biases during arm movements. Exp. Brain Res. 2011, 209, 299–309. [Google Scholar] [CrossRef] [PubMed]
- Goble, J.A.; Zhang, Y.; Shimansky, Y.; Sharma, S.; Dounskaia, N.V. Directional Biases Reveal Utilization of Arm’s Biomechanical Properties for Optimization of Motor Behavior. J. Neurophysiol. 2007, 98, 1240–1252. [Google Scholar] [CrossRef]
- Dounskaia, N.; Shimansky, Y. Strategy of arm movement control is determined by minimization of neural effort for joint coordination. Exp. Brain Res. 2016, 234, 1335–1350. [Google Scholar] [CrossRef]
- Schmidtke, H.; Stier, F. Der Aufbau Komplexer Bewegungsablaufe Aus Elementarbewegungen [The Development of Complex Movement Patterns from Simple Motions]; Forschungsbericht des Landes Nordrhein-Westfalen; Springer-Verlag: Berlin/Heidelberg, Germany, 1960; Volume 822, pp. 13–32. [Google Scholar]
- Sanders, M.; McCormick, E. Human Factors in Engineering and Design, 7th ed.; McGraw Hill: New York, NY, USA, 1993. [Google Scholar]
- Levin, O.; Ouamer, M.; Steyvers, M.; Swinnen, S.P. Directional tuning effects during cyclical two-joint arm movements in the horizontal plane. Exp. Brain Res. 2001, 141, 471–484. [Google Scholar] [CrossRef]
- Seow, S.C. Information Theoretic Models of HCI: A Comparison of the Hick-Hyman Law and Fitts’ Law. Hum.–Comput. Interact. 2005, 20, 315–352. [Google Scholar] [CrossRef]
- Hancock, P.A.; Newell, K.M. The movement speed-accuracy relationship in space-time. In Motor Behavior; Heuer, H., Kleinbeck, U., Schmidt, K., Eds.; Springer: Berlin/Heidelberg, Germany, 1985; pp. 153–188. [Google Scholar] [CrossRef]
- Berret, B.; Jean, F. Why Don’t We Move Slower? The Value of Time in the Neural Control of Action. J. Neurosci. 2016, 36, 1056–1070. [Google Scholar] [CrossRef]
- Rigoux, L.; Guigon, E. A Model of Reward- and Effort-Based Optimal Decision Making and Motor Control. PLoS Comput. Biol. 2012, 8, e1002716. [Google Scholar] [CrossRef]
- Shadmehr, R.; Orban de Xivry, J.J.; Xu-Wilson, M.; Shih, T.-Y. Temporal Discounting of Reward and the Cost of Time in Motor Control. J. Neurosci. 2010, 30, 10507–10516. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, Y.; Burdet, E.; Gordon, J.; Schweighofer, N. The duration of reaching movement is longer than predicted by minimum variance. J. Neurophysiol. 2016, 116, 2342–2345. [Google Scholar] [CrossRef]
- Khatami, S. Kinematic Isotropy and Robot Design Optimization Using a Genetic Algorithm Method. Ph.D. Thesis, The University of British Columbia, Vancouver, BC, Canada, 2001. [Google Scholar]
- Patel, S.; Sobh, T. Manipulator Performance Measures—A Comprehensive Literature Survey. J. Intell. Robot. Syst. Theory Appl. 2014, 77, 547–570. [Google Scholar] [CrossRef]
- Sharkawy, A.; Papakonstantinou, C.; Papapostopoulos, V.; Moulianitis, V.C.; Aspragathos, N. Task Location for High Performance Human-Robot Collaboration. J. Intell. Robot. Syst. 2019, 100, 183–202. [Google Scholar] [CrossRef]
- Merlet, J.-P. Jacobian, manipulability, condition number and accuracy of parallelrobots. J. Mech. Des. 2005, 128, 199–206. [Google Scholar] [CrossRef]
- Murray, R.M.; Li, Z.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 1994; ISBN 9780849379819. [Google Scholar]
- Nurahmi, L.; Caro, S. Dimensionally Homogeneous Jacobian and Condition Number. Appl. Mech. Mater. 2016, 836, 42–47. [Google Scholar] [CrossRef]
- Leger, J. Condition-Number Minimization for Functionally Redundant Serial Manipulators; McGill University: Montréal, QC, Canada, 2014. [Google Scholar]
- Stocco, L.; Salcudean, S.E.; Sassani, F. Fast Constrained Global Minimax Optimization of Robot Parameters. Robotica 2001, 16, 595–605. [Google Scholar] [CrossRef]
- Ayusawa, K.; Rioux, A.; Yoshida, E.; Venture, G.; Gautier, M. Generating persistently exciting trajectory based on condition number optimization. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6518–6524. [Google Scholar]
- Swevers, J.; Ganseman, C.; Schutter, J.D.; Van Brussel, H. Experimental Robot Identification Using Optimised Periodic Trajectories. Mech. Syst. Signal Process. 1996, 10, 561–577. [Google Scholar] [CrossRef]
- Sharkawy, A.N. Sub-Optimal Configuration for Human and Robot in Co-Manipulation Tasks Based on Inverse Condition Number. In Proceedings of the 31st International Conference on Computer Theory and Applications, ICCTA 2021—Proceedings, Alexandria, Egypt, 11–13 December 2021; pp. 72–77. [Google Scholar]
- Kee, D.; Karwowski, W. The boundaries for joint angles of isocomfort for sitting and standing males based on perceived comfort of static joint postures. Ergonomics 2001, 44, 614–648. [Google Scholar] [CrossRef]
- Pheasant, S.; Haslegrave, C.M. Bodyspace: Anthropometry, Ergonomics and the Design of Work, 3rd ed.; CRC Press: London, UK, 2005. [Google Scholar]
- Kuka, L.W.R. User-Friendly, Sensitive and Flexible. Available online: https://www.kukakore.com/wp-content/uploads/2012/07/KUKA_LBR4plus_ENLISCH.pdf (accessed on 7 March 2020).
- Bicchi, A.; Prattichizzo, D. Manipulability of cooperating robots with unactuated joints and closed-chain mechanisms. IEEE Trans. Robot. Autom. 2000, 16, 336–345. [Google Scholar] [CrossRef]
- Ranjbaran, F.; Angeles, J.; Kecskemethy, A. On the Kinematic Conditioning of Robotic Manipulators. In Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 3167–3172. [Google Scholar] [CrossRef]
- Gosselin, C.M. The optimum design of robotic manipulators using dexterity indices. Rob. Auton. Syst. 1992, 9, 213–226. [Google Scholar] [CrossRef]
- Kimt, J.; Khosla, P.K. Dexterity Measures for Design and Control of Manipulators. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems IROS ’91, Osaka, Japan, 3–5 November 1991; pp. 758–763. [Google Scholar] [CrossRef]
- Chiu, S.L. Kinematic Characterization of Manipulators: An Approach To Defining Optimality. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 828–833. [Google Scholar] [CrossRef]
- Angeles, J.; López-cajún, C.S. Kinematic Isotropy and the Conditioning Index of Serial Robotic Manipulators. Int. J. Rob. Res. 1992, 11, 560–571. [Google Scholar] [CrossRef]
- Asada, H.; Granito, J.A.C. Kinematic and Static Characterization of Wrist Joints and Their Optimal Design. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 244–250. [Google Scholar] [CrossRef]
- Gao, F.; Liu, X.; Gruver, W.A. The Global Conditioning Index in the Solution Space of Two Degree of Freedom Planar Parallel Manipulators. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics. Intelligent Systems for the 21st Century, Vancouver, BC, Canada, 22–25 October 1995; pp. 4055–4058. [Google Scholar] [CrossRef]
- Flash, T.; Hogan, N. The coordination of Arm Movements: An Experimentally Confirmed Mathematical Model. J. Neurosci. 1985, 5, 1688–1703. [Google Scholar] [CrossRef] [PubMed]
- Melanie, M. An Introduction to Genetic Algorithms, 1st ed.; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Bodenhofer, U. Genetic Algorithms: Theory and Applications; Johannes Kepler University: Linz, Austria, 2003. [Google Scholar]
- Coley, D.A. An Introduction to Genetic Algorithms for Scientists and Engineers; World Scientific Publishing Co. Pte. Ltd.: Singapore, 1999. [Google Scholar]
- Sharkawy, A.-N.; Aspragathos, N. Human-Robot Collision Detection Based on Neural Networks. Int. J. Mech. Eng. Robot. Res. 2018, 7, 150–157. [Google Scholar] [CrossRef]
- Sharkawy, A.-N.; Ali, M.M. NARX Neural Network for Safe Human–Robot Collaboration Using Only Joint Position Sensor. Logistics 2022, 6, 75. [Google Scholar] [CrossRef]
- KUKA.FastResearchInterface 1.0, KUKA System Technology (KST), version 2; KUKA Roboter GmbH: Augsburg, Germany, 2011.
- Sharkawy, A.-N.; Koustoumpardis, P.N.; Aspragathos, N. Variable Admittance Control for Human-Robot Collaboration based on Online Neural Network Training. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1334–1339. [Google Scholar]
- Sharkawy, A.-N.; Koustoumpardis, P.N.; Aspragathos, N. A Neural Network based Approach for Variable Admittance Control in Human- Robot Cooperation: Online Adjustment of the Virtual Inertia. Intell. Serv. Robot. 2020, 13, 495–519. [Google Scholar] [CrossRef]
- Sharkawy, A.-N. Minimum Jerk Trajectory Generation for Straight and Curved Movements: Mathematical Analysis. In Advances in Robotics and Automatic Control: Reviews; Yurish, S.Y., Ed.; International Frequency Sensor Association (IFSA) Publishing: Barcelona, Spain, 2021; Volume 2, pp. 187–201. Available online: https://www.sensorsportal.com/HTML/BOOKSTORE/Advances_in_Robotics_Reviews_Vol_2.pdf (accessed on 25 February 2022).
- Gopinathan, S.; Mohammadi, P.; Steil, J.J. Improved Human-Robot Interaction: A manipulability based approach. In Proceedings of the ICRA 2018 Workshop on Ergonomic Physical Human-Robot Collaboration, Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Erkaya, S. Effects of joint clearance on the motion accuracy of robotic manipulators. J. Mech. Eng. 2018, 64, 82–94. [Google Scholar] [CrossRef]
- Mavroidis, C.; Flanz, J.; Dubowsky, S.; Drouet, P.; Goitein, M. High performance medical robot requirements and accuracy analysis. Robot. Comput. Integr. Manuf. 1998, 14, 329–338. [Google Scholar] [CrossRef]
- Marônek, M.; Bárta, J.; Ertel, J. Inaccuracies of industrial robot positioning and methods of their correction. Teh. Vjesn.—Tech. Gaz. 2015, 22, 1207–1212. [Google Scholar] [CrossRef]
- Yoshikawa, T. Foundations of Robotics: Analysis and Control; MIT Press Cambridge: Cambridge, MA, USA, 1990; ISBN 0-262-24028-9. [Google Scholar]
- Peternel, L.; Kim, W.; Babic, J.; Ajoudani, A. Towards ergonomie control of human-robot co-manipulation and handover. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 55–60. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Human Arm | KUKA Robot | ||||||
|---|---|---|---|---|---|---|---|---|
| (m) | (m) | (m) | (m) | |||||
| 1 | 0 | 0 | 0.3105 | 0 | ||||
| 2 | 0 | 0 | 0 | 0 | ||||
| 3 | 0.4 | 0 | 0.4 | 0 | ||||
| 4 | 0 | 0.41 | 0 | 0 | ||||
| 5 | 0 | 0 | 0.39 | 0 | ||||
| 6 | 0 | 0 | 0 | 0 | ||||
| 7 | 0.1 | 0 | 0.078 | 0 | ||||
| Line | Center Point (Initial Point) Coordinates | with the x Axis (deg) | Line Segment Path Endpoints | |||||
|---|---|---|---|---|---|---|---|---|
| The First Endpoint | The Second Endpoint | |||||||
| x | y | z | x | y | z | |||
| Line 1 | 71.9 | −0.4154 | 0.1528 | 0.3491 | −0.5139 | −0.1485 | 0.3410 | |
| Line 2 (BL) | −77.5 | −0.4999 | 0.1637 | 0.3453 | −0.4289 | −0.1561 | 0.3398 | |
| Line 3 | −63.2 | −0.5346 | 0.1419 | 0.3459 | −0.3924 | −0.1398 | 0.3391 | |
| Line Drawing Task Performance | Line | |||
|---|---|---|---|---|
| Line 1 | Line 2 (BL-Line) | Line 3 | ||
| Position Error (cm) | mean | 0.521 | 0.425 | 0.463 |
| Std. | 0.153 | 0.187 | 0.195 | |
| Applied Effort (Nm) | mean | 0.4073 | 0.574 | 0.586 |
| Std. | 0.19 | 0.267 | 0.238 | |
| Task Completion Time (s) | mean | 14.810 | 12.613 | 12.39 |
| Std. | 4.83 | 4.91 | 4.76 | |
| Oscillations (Fourier Transform of the Applied Force) (Hz) | mean of freq. | 37.54 | 29.01 | 33.633 |
| Std. | 19.814 | 19.025 | 14.943 | |
| Line Drawing Task Performance | Line | ||
|---|---|---|---|
| BL-Line Based on Manipulability Index | BL-Line Based on Condition Number | ||
| Position Error | mean | 0.24 | 0.425 |
| Std. | 0.20 | 0.187 | |
| Applied Effort | mean | 0.588 | 0.574 |
| Std. | 0.321 | 0.267 | |
| Task Completion Time | mean | 16.98 | 12.613 |
| Std. | 5.56 | 4.91 | |
| Oscillations (Fourier Transform of the Applied Force) (Hz) | mean of freq. | 52.51 | 29.01 |
| Std. | 20.69 | 19.025 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharkawy, A.-N. Task Location to Improve Human–Robot Cooperation: A Condition Number-Based Approach. Automation 2023, 4, 263-290. https://doi.org/10.3390/automation4030016
Sharkawy A-N. Task Location to Improve Human–Robot Cooperation: A Condition Number-Based Approach. Automation. 2023; 4(3):263-290. https://doi.org/10.3390/automation4030016
Chicago/Turabian StyleSharkawy, Abdel-Nasser. 2023. "Task Location to Improve Human–Robot Cooperation: A Condition Number-Based Approach" Automation 4, no. 3: 263-290. https://doi.org/10.3390/automation4030016
APA StyleSharkawy, A.-N. (2023). Task Location to Improve Human–Robot Cooperation: A Condition Number-Based Approach. Automation, 4(3), 263-290. https://doi.org/10.3390/automation4030016