1. Introduction
Growing concerns about the environmental impact and depletion of fossil fuels (e.g., oil, coal, etc.) have motivated researchers and automakers to pay increasing attention to green electric-power-based vehicles. Over the last decade, numerous promising solutions based on electric-powered vehicles have been introduced to meet future market needs and commercial requirements. Among them, Electric Transit Buses (ETBs) have drawn much attention from municipal governments to be implemented for public transportation purposes [
1,
2,
3,
4]. Despite the economic aspects of electric vehicles that have been considered in the literature, these systems face some restrictions from economical and technical perspectives which are mainly created by the long time of battery charging, size of the battery, and restriction of access to the charging station [
5,
6,
7]. Apart from the drawbacks of traditional electric vehicles, many serious problems and limitations have arisen when these systems were adopted for ETBs. For instance, one-third of the total cost of the ETB with small passengers belonged to the battery pack, which is not economically viable. In addition, deployment of a large-pack battery system needs a long recharging time, which is estimated to be about several hours using the existing charging technologies [
6,
8,
9].
Recently, a new generation of electric vehicles based on wireless charging (WC) technology has been developed to address the problems of current generation systems [
10,
11,
12].
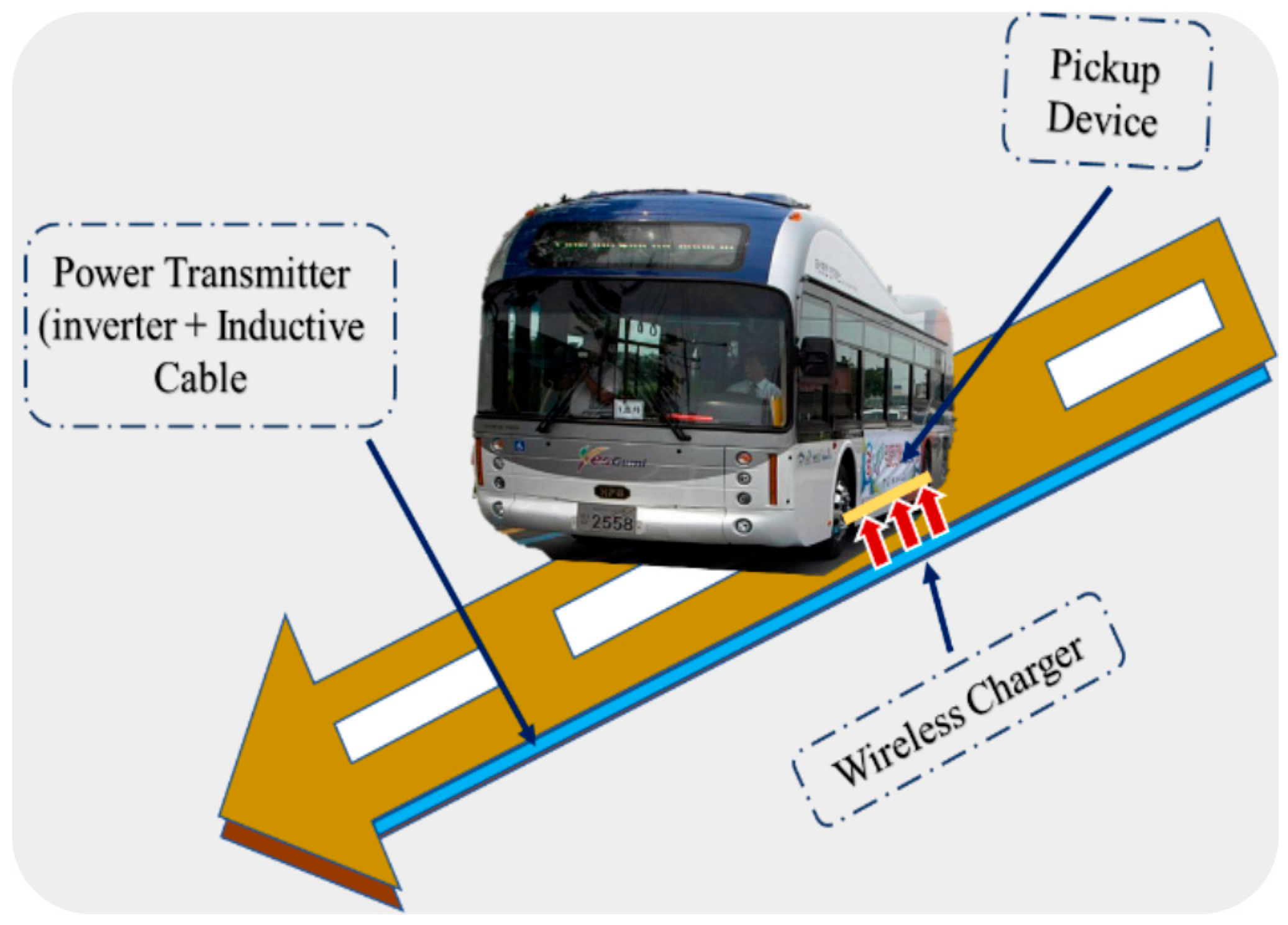
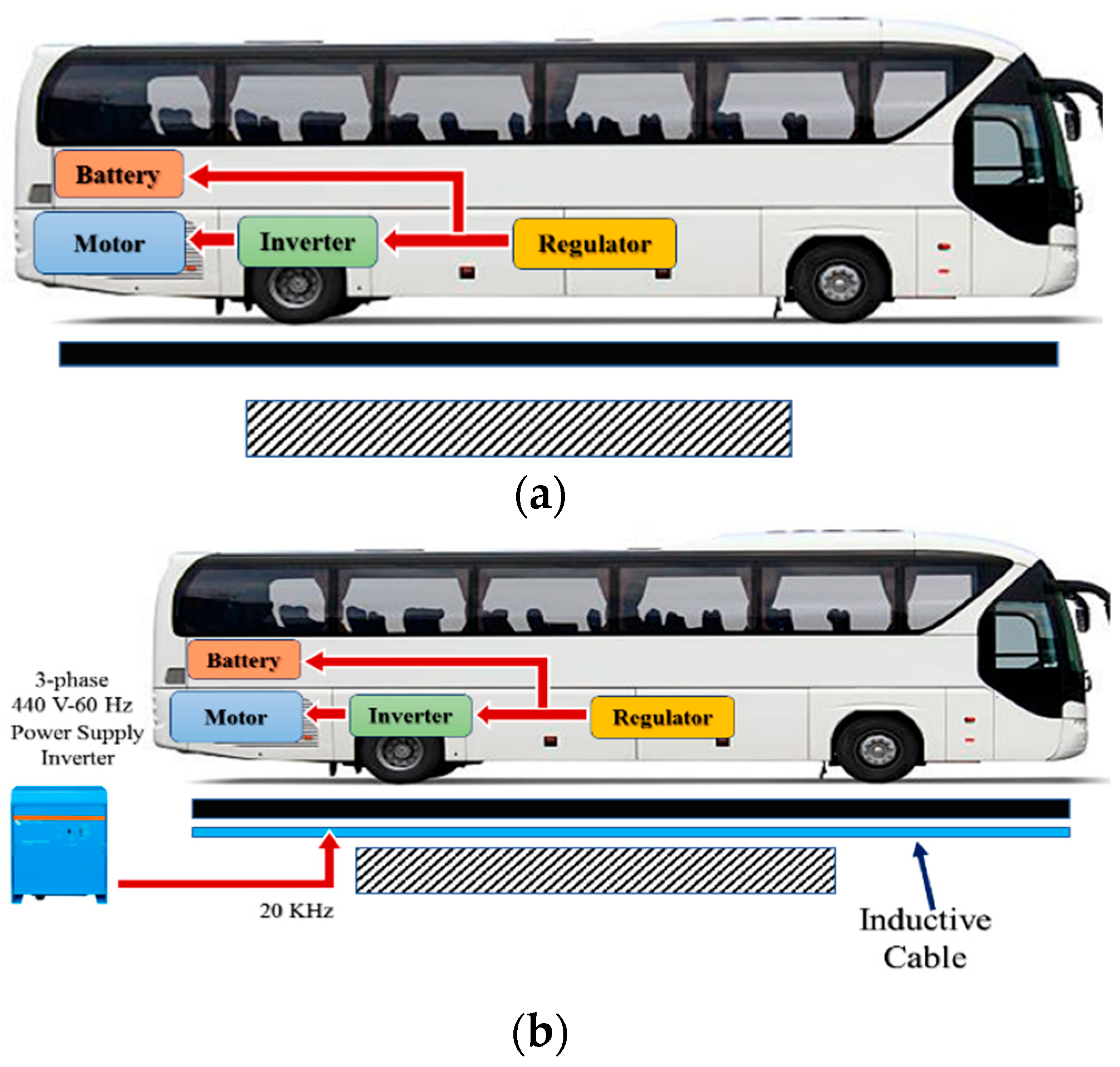
Figure 1 illustrates a Wireless Charging Electric Transit Bus (WCETB) system which is designed based on the wireless power infrastructure equipped with road chargers. In fact, by employing this innovative solution, energy from the network will be transmitted to the vehicle during its movement. The WCETB technology is made of two separate sections:
a fleet of vehicles and
the charging infrastructure (power transmitters under the road surface) [
5,
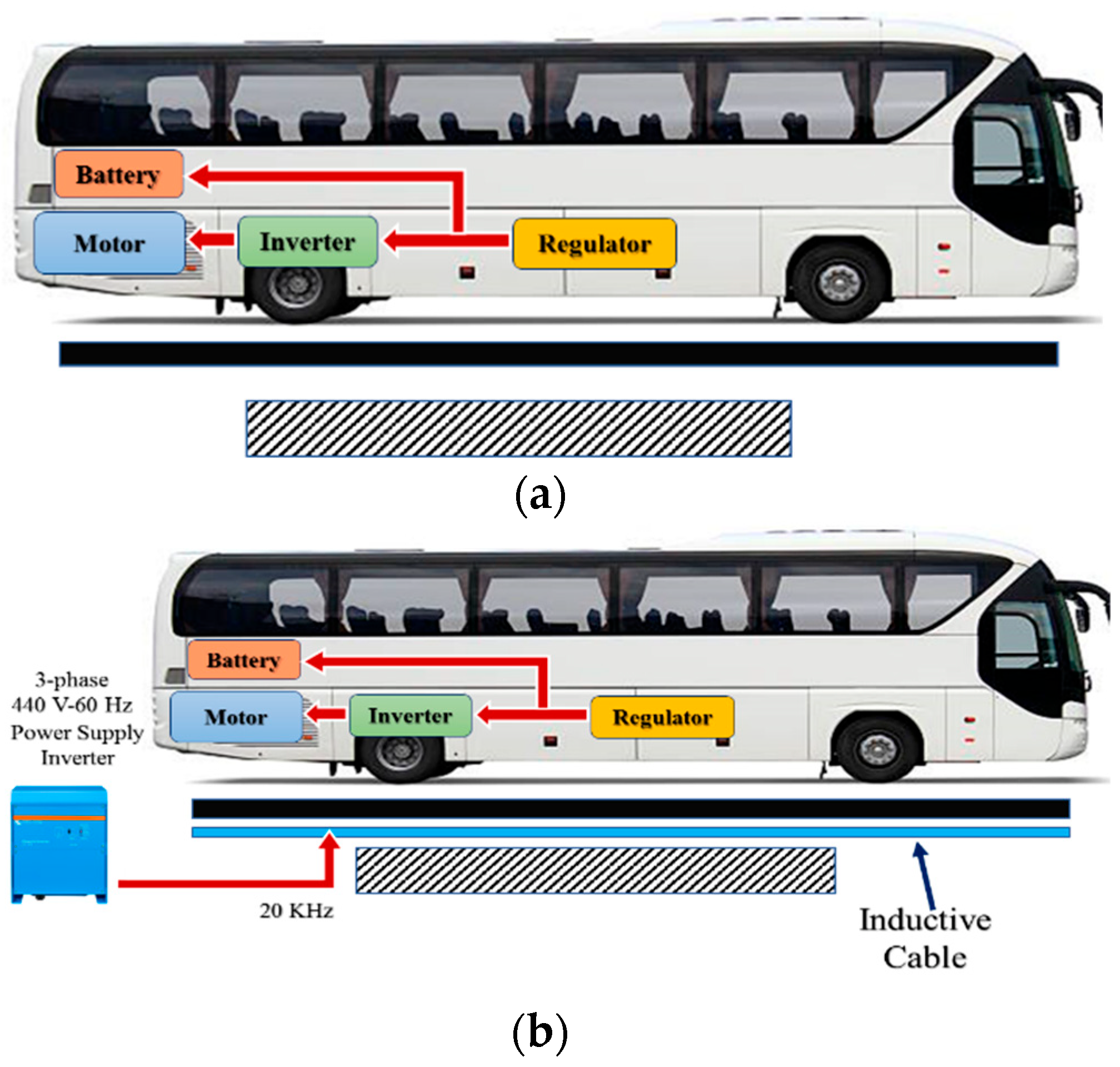
13]. A pickup component is embedded in the structure of WCETB to collect the power from the installed transmitters. The WCETB and traditional electric vehicles have similar concepts where an electric motor and battery pack are adopted as the main engine and energy supply, respectively. However, the WCETB system does not need a cable for connecting the vehicle and charger; the battery in such systems can be wirelessly charged by the transmitters. The power transmitter works based on the idea of noncontact charging which produces a magnetic field to supply the required energy for the vehicle. The inverter and inductive cables are the main components of the power transmitter, which should be installed along the path [
5,
14].
Up to now, various innovative strategies have been proposed by automakers. Dynamic wireless charging was introduced by the Korean Advanced Institute of Science and Technology (KAIST) for electric buses in 2008. In 2012, an advanced version of the shuttle bus prototype was constructed at the KAIST campus [
15]. Despite the wireless power, ETB was first introduced by the KAIST, and several other wireless-based power ETB systems were developed with promising ideas. For instance, Utah State University (USU) conducted an electrical examination route that demonstrated the significant potential of dynamic wireless power technology in online electrical buses [
16,
17].
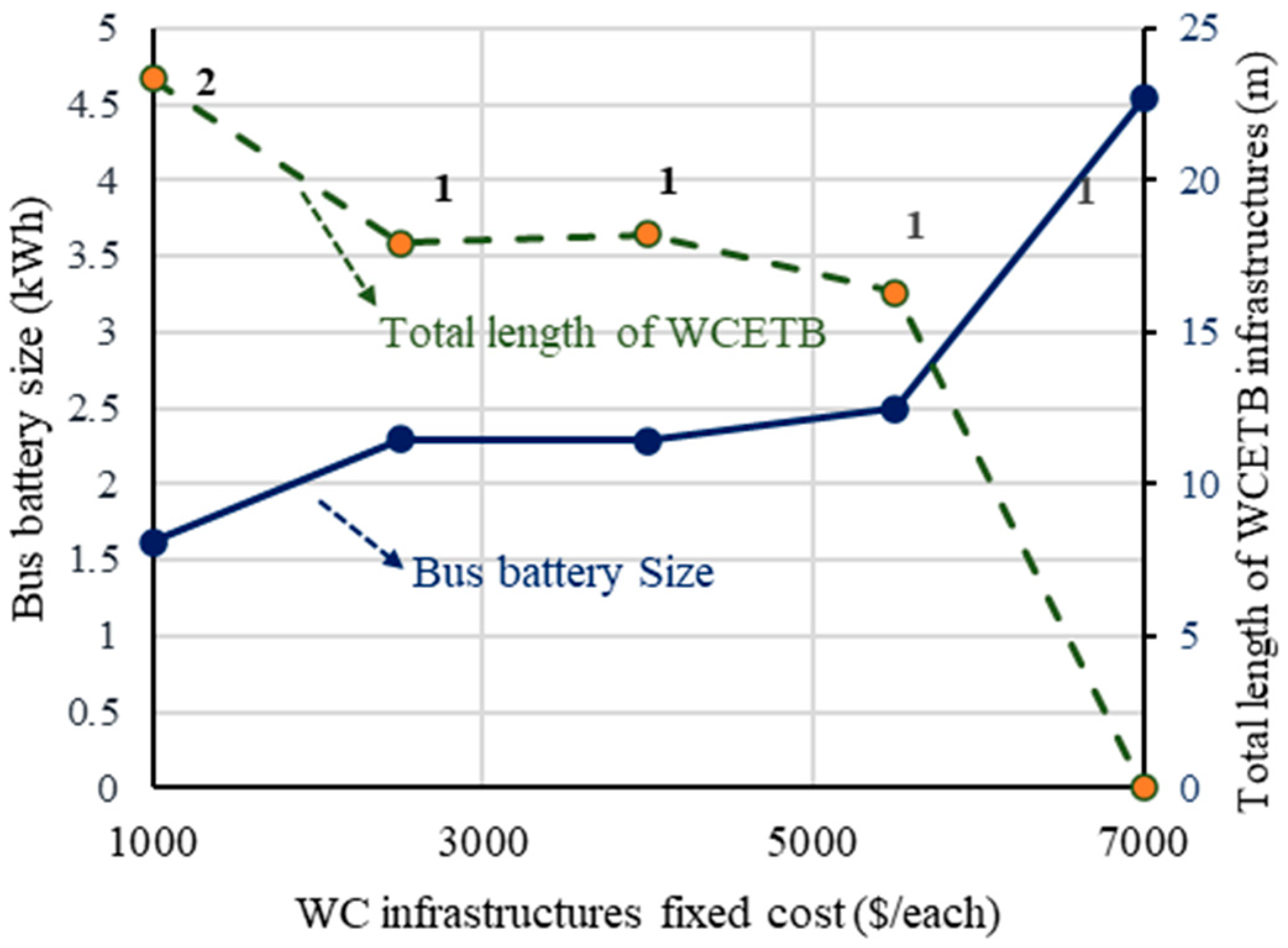
Despite the benefits of the WCETB system, the implementation of wireless charging technology brings new challenges to the electric bus systems, i.e., the allocation of a power transmitter and capacity of the battery [
13,
18,
19]. The deployment of large power transmitters reduces the capacity of the battery system; however, the initial costs of power transmitters will be raised. When the power transmitters are less adopted, large batteries are required in the electric buses, which increases the long-term cost of storage systems. Thus, a balance between the two factors is desirable, and it necessitates minimizing the relationship between the power transmitter and battery size [
20]. Despite the rich body of literature on wireless charging electric transit buses, limited works have been devoted to the optimal design problem of such systems. Helber et al. [
14] studied the location problem of the dynamic wireless charging system to supply power to such vehicles during their operation. However, the algebraic scheme suggested in [
14] suffers the complexity of implementation in solving high-dimension problems. To address this issue, meta-heuristic techniques are often recognized as a promising scheme to solve engineering problems. Utilizing a metaheuristic approach has several benefits, one of which is the ability to see any problem as a “black box” and then modify the constraints, coefficients, and objective function in accordance with the problem specification. Dae Ko and Jang [
5] developed an analytical strategy based on a particle swarm optimization (PSO) algorithm to simulate the charging/discharging of the battery for multiple On-line Electric Vehicles (OLEVs). In [
6], Jae Jang et al. proposed an innovative energy-powered transportation scheme for online electric vehicle-based shuttle buses to commercialize the deployment of this technology. In this study, a compromise between the allocation of energy transmitters and battery capacity is provided for commercial purposes. The location of the power transmitter and battery capacity was optimally designed by Mixed Integer Programming (MIP) [
9].
Overall, the contributions of the present work are the following:
- (I).
In the current work, a novel meta-heuristic optimization approach based on an Improved version of the Whale Optimization Algorithm (IWOA) has been developed for the problem of the WCETB system in a multi-criteria scheme.
- (II).
The problem of the WCETB system has been formulated and optimally designed to offer a compromise between the power transmitter and battery capacity for commercial purposes.
- (III).
The efficiency of the suggested optimal strategy for the WCETB system has been verified under two different operations, namely neglecting traffic congestion and considering traffic congestion.
- (IV).
The optimization problem was solved by General Algebraic Modeling System (GAMS) software to verify the outcomes obtained by the meta-heuristic scheme.
- (V).
The sensitivity analysis of the WCETB system has been carried out under various conditions, i.e., changes in the number of buses and length of the route.
The remainder of the current paper is organized as follows: In
Section 2, the configuration and operational issues of WCETB are described. The proposed optimization is presented in
Section 3.
Section 4 is devoted to numerical analysis and comparison outcomes. The conclusions are summarized in
Section 5.
3. Development of the Electric Transit Bus with Wireless Charging Infrastructure
In this section, the mathematical modeling of the WCETB system is developed to build an optimization problem for minimizing the entire system. In the optimization problem, the battery’s size and allocation of the transmitter are the main design factors.
Before formulating the system’s model, the operational rules along with the notations are presented [
17]. The scheme of the architecture of the WCETB system is shown in
Figure 2.
The position of transmitter units is described by a spatial set, given as [
6]:
where
. Then, the terms
and
are the bus travel time and velocity projection of the vehicle at time
, respectively. Under the above definitions, the displacement variable (
) is described by
By the description of (6), the time in which the bus travels over a transmitter unit is defined by a temporal set:
where
.
3.1. Configuration of Wireless Bus with Considering Traffic
In this work, the goal is to find the battery size and to allocate the transmitter units by minimizing the operational costs of the vehicle, while the battery capacity is kept within
. For the studied WCETB system, the optimization problem with consideration of traffic congestion for
vehicles are illustrated as:
subject to
where
,
,
, respectively, denote the battery cost (cost/kWh), the fixed installation cost of a transmitter (cost/transmitter), and the installation cost of the transmitter’s length (cost/length). In this realistic scenario, vehicle speed is a function of time, and certain traffic routes experience congestion. An illustrative example of such an environment is electric buses operating alongside regular traffic, a common occurrence in traffic networks worldwide.
3.2. Configuration of Wireless Bus without Considering Traffic
The second model focuses on a WCETB system operating in an environment with no traffic and minimal vehicle interactions and uncertainties. This scenario is representative of dedicated bus lanes where public buses can operate independently. For the formulation of this system, a decision variable is defined by
, which denotes the length of the transmitter at the station
. Generally, the optimization problem without considering traffic congestion can be formulated as follows [
6]:
subject to
6. Conclusions
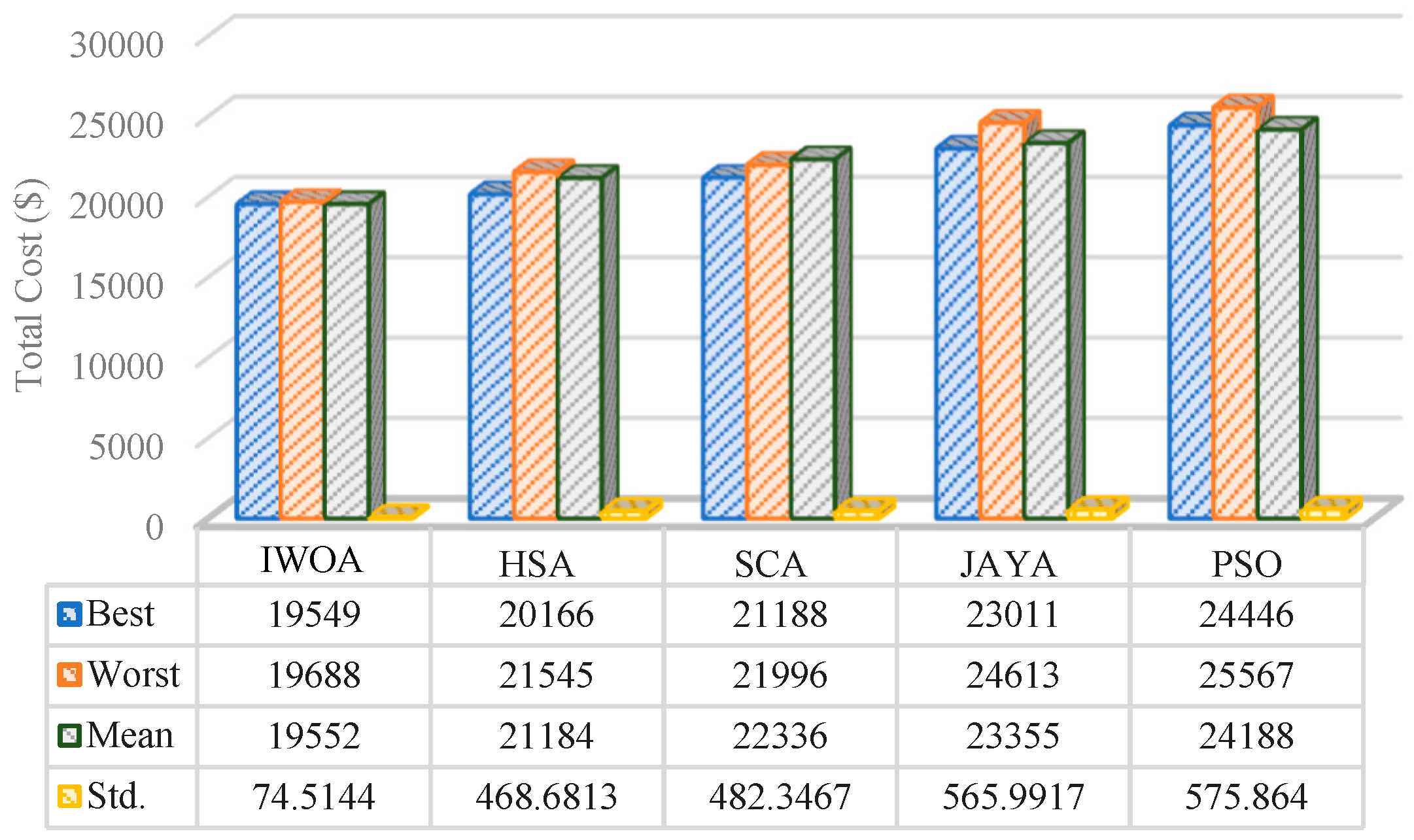
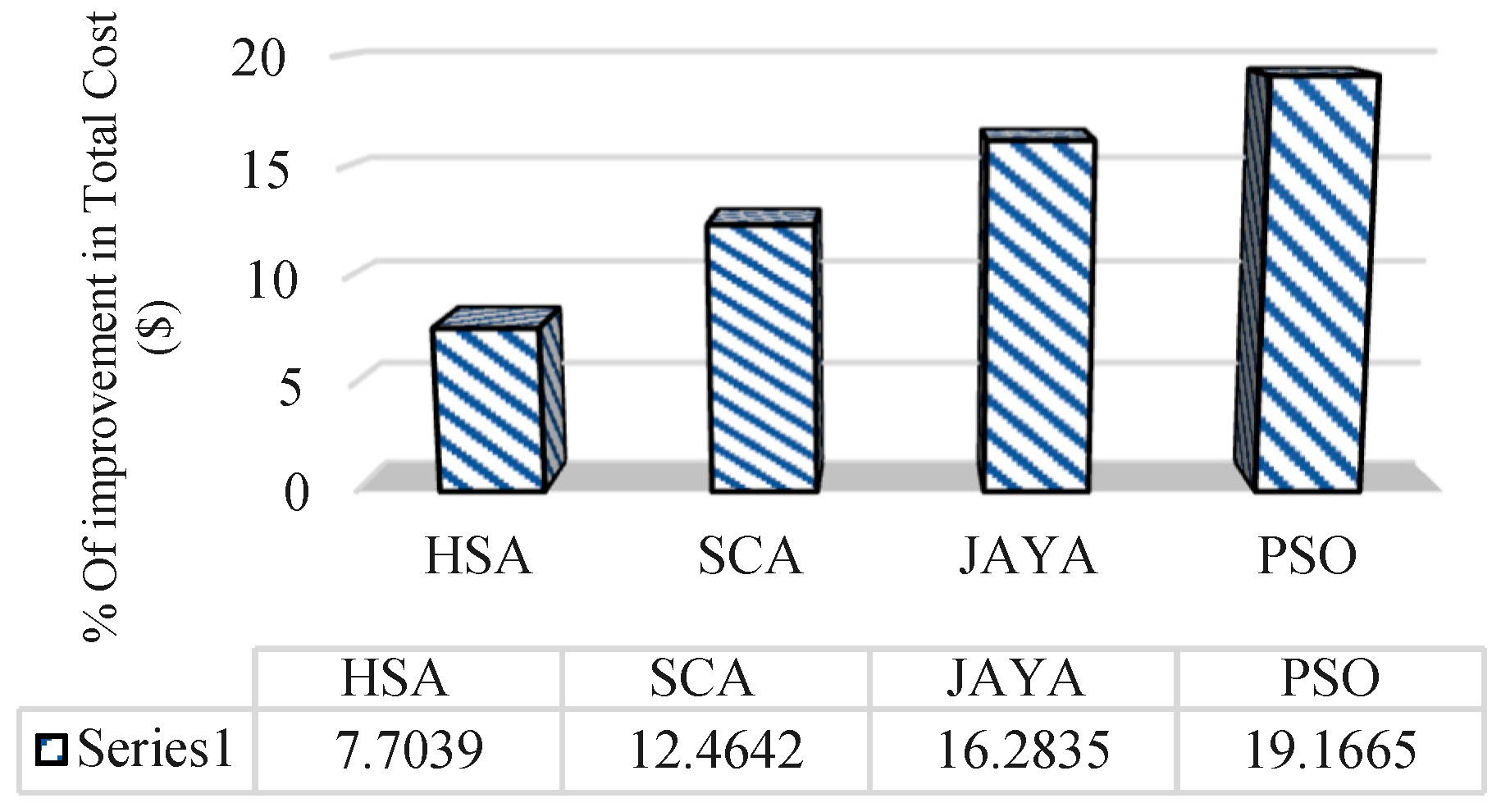
The WCETB system is a promising electricity-powered transportation technology that remotely transfers power from transmitters buried underground. In this paper, an optimal placement methodology is proposed for the WCETB system from the energy logistics point of view. Two mathematical models are built to elaborate the cost balance between transmitter allocation and battery capacity, one neglecting traffic congestion and one considering traffic congestion. The established models are developed for a public transportation system with a fixed path, in which the bus moves with a pre-defined velocity. The IWOA algorithm is adopted to optimally allocate the transmitter and select the battery size by considering both factors in an objective function. The numerical outcomes revealed the usefulness of the suggested optimal planning technique for the WCETB system compared to the state-of-the-art methods. For the verification of the WCETB’s design of the suggested meta-heuristic methodology, the optimal values for the studied optimization system are mathematically obtained by GAMS. The outcomes of the paper revealed excellent performance of the proposed framework in comparison with other heuristic optimization tools applied to the WCETB problem. As future work, the maximum output power of the battery and motor based on the WCETB’s required performance (e.g., max. speed, max. acceleration) according to its specification (e.g., weight) can be considered as constraints in the optimization problem.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}