Abstract
Starting from the problem of studying the parametric robustness in the case of the control of a permanent magnet-synchronous motor (PMSM), although robust control systems correspond entirely to this problem, due to the complexity of the algorithms of the robust type, in this article the use of switched systems theory is proposed as a study option, given the fact that these types of systems are suitable both for the study of systems with variable structure and for systems with significant parametric variation under conditions of lower complexity of the control algorithms. The study begins by linearizing a PMSM model at a static operating point and continues with a systematic presentation of the basic elements and concepts concerning the stability of switched systems by applying these concepts to the control system of a PMSM based on the field-oriented control (FOC) strategy, which usually changes the value of its parameters during operation (stator resistance Rs, stator inductances Ld and Lq, but also combined inertia of PMSM rotor and load J). The numerical simulations performed in Simulink validate the fact that, for parametric variations of the PMSM structure, the PMSM control switched systems preserve qualitative performance in terms of its control. A series of Matlab programs are presented based on the YALMIP toolbox to obtain Pi matrices, by solving Lyapunov–Metzler type inequalities, and using dwell time to demonstrate stability, as well as the qualitative study of the performance of PMSM control switched systems by presenting in phase plane and state space analysis of the evolution of state vectors: ω PMSM rotor speed, iq current, and id current.
1. Introduction
Simultaneously with the development of interest in PMSM, due to undeniable construction and performance advantages, PMSM control systems and their applications have been developed in areas such as robotics, CNC machines, computer peripherals, and aerospace engineering. These require both high performance of the control system and parametric robustness in the sense of performance preservation in case of significant variation of PMSM parameters [1,2,3,4].
Common control strategies for PMSM include FOC and direct torque control (DTC) [5,6,7,8]. If the DTC strategy provides acceptable performance but with a relatively simple control system, the FOC strategy provides both superior control performance and a control structure that can be implemented in low- and medium-cost embedded systems.
Different types of control systems can provide high performance, but variable costs of implementation in embedded systems have been developed and implemented in a particular manner depending on the applications and requirements of the PMSM control system. Thus, one can mention adaptive [9,10], predictive [11,12], and sliding mode control (SMC) [13,14], as well as neuro-fuzzy [15,16] and computational intelligence-based control systems [17,18].
In terms of parametric robustness, robust control systems [19,20,21] have obviously been developed and implemented with excellent results, but the complexity of robust computational algorithms should not be neglected.
Switched systems are characterized by the fact that at certain moments of time, under the action of a switching signal, they can change their structure or parameter values. Thus, if the system changes its parameter values within a relatively large range, the use of switched systems theory [22,23,24,25,26,27,28] can be an alternative approach to the study of parametric robustness under the circumstances of a decrease in the complexity of the implemented algorithms.
This paper presents the FOC control strategy for the control of a PMSM by emphasizing very good control performance on the condition that implementation in an embedded system proves to be easy [29]. Elements of switched systems theory are also used to study parametric robustness.
Among the YALMIP toolbox facilities we can mention specialized solvers for the classes of problems to which it is applied, and a unitary explanation of the way to use the syntax. The studies from [30,31,32,33] were written especially by the YALMIP toolbox developers and were chosen as examples of problem classes regarding automatic robust convex programming and explicit model-predictive control (MPC) for linear parameter-varying (LPV) systems used for stability and optimality. With the help of the YALMIP toolbox, Lyapunov–Metzler-type inequalities can be solved, which is the way to demonstrate the stability of switched systems.
Compared to other elements of qualitative analysis for systems stability with time-varying parameters, among which we can list Kharitonov’s theorem, the Nyquist stability criterion, and the Bode characteristics with other design elements of robust controllers for PMSM presented in [34], solving the Lyapunov–Metzler-type inequalities can produce information regarding system stability even under the conditions of some parametric and structural changes.
The main contributions of this paper can be summarized as follows:
- PMSM model linearization at a static operating point;
- Basic elements and concept summary of switched-systems stability;
- Application of FOC control strategy and control switched systems for the control of a PMSM under significant variation of parameters that usually change value during operation (stator resistance Rs, stator inductances Ld and Lq, but also combined inertia of PMSM rotor and load J);
- Matlab/Simulink program implementation for calculation of the control system characteristic matrices under parametric variations, calculation of the positive definite matrices Pi from Lyapunov–Metzler inequalities to demonstrate system stability;
- Matlab program implementation for calculation of the dwell time;
- Numerical simulations development for the PMSM control switched systems using a switching signal with frequency lower than the one corresponding to the dwell time;
- Qualitative study of the PMSM control system performance by presenting in phase plane and state space the evolution of state vectors: ω PMSM rotor speed, iq current, and id current.
The rest of the paper is organized as follows. The PMSM mathematical model and the FOC-type strategy are presented in Section 2, and the basic concepts of the switched systems are presented in Section 3. The numerical simulations realized in Matlab/Simulink programming and numerical computing environment for the PMSM control switched systems are presented in Section 4, while the final section presents conclusions and perspectives on future approaches.
2. PMSM Mathematical Model and FOC-Type Strategy
The FOC–PMSM control strategy shown as a block diagram in Figure 1 emphasizes the two cascade control loops; inner loop for current control and outer loop for the PMSM rotor speed control.
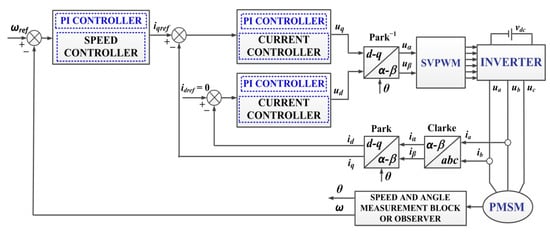
Figure 1.
General block diagram for PMSM control system based on FOC-type strategy.
The mathematical model of the PMSM is a nonlinear one, and is presented by the relations in the system (1) [5,6,7,8].
where ud, uq and id, iq denote the stator voltages and stator currents of the PMSM, respectively, these relations being valid in the d–q reference frame. We have denoted the stator inductances and resistances of the PMSM in the d–q reference frame as Ld, Lq and Rd, Rq. We also denoted the stator resistance of the PMSM as Rs, the PMSM rotor speed as ω, the flux linkage as λ0, the number of pair poles as np, the PMSM rotor moment inertia combined with load moment inertia as J, the load torque as TL, and finally the viscous friction coefficient as B.
For Ld = Lq system (1) can be written under the usual form given by the system (2).
The linearization of the PMSM nonlinear model are achieved around an operating point (x*, u*), where the states and commands are given in (3):
The following equilibrium relation can be written around this operating point:
A linear system described in (5) can also be associated with the system (3):
where
As a typical example of the static operating point, we can choose a state vector of the PMSM control system defined in the relation (7).
3. Switched Systems—A General Description
Hybrid systems can generally be defined as systems in which continuous and discrete actions and states dynamically interact with each other. Of these systems, those that are continuous, but influenced by discrete events and have the effect of continuously changing the described dynamics, define the switched-type systems. To be define them more accurately, the differential system [22,23,24]
can be considered, where is a Lipschitz function.
System (8) can be rewritten in the following form, which characterizes a switched system:
where there are N smooth vector fields, , and there is also a switching signal piecewise constant .
For example, the equations defining the temperature pattern in a heated room can be written as [22,23,24]:
where θ represents the room temperature and λ and β are two quantities which characterize the heating process. Based on these, system (10) can be written as a switched system:
For the linear case, the switched systems can be written as
A necessary condition for the stability of the switching system where the switching random function is that all matrices are Hurwitz.
If σ(t) is a switching signal defined for example as in the following expression:
where 2T is the period of the system, and is the transition matrix of the system (12) considered periodic in this example, the monodromy matrix is defined as
According to [23] the system is asymptotically stable if the monodromy matrix has subunit eigenvalues modulus.
For the general form of the linear case, one can consider the switched systems
where the notations are the usual ones, and , are Hurwitz matrices.
There is the matter of finding the minimum of for which
and fulfills the condition
where: is the norm associated with the system defined in relation (16).
In this respect the following theorem is presented [24,25,26]:
Theorem 1.
Given the system (15) and assuming that there is a positive definite matrix P so that the following relation is satisfied,
then the global asymptotic stability of the switched systems (15) is ensured for the switching signal and in addition the following inequality is fulfilled:
Proof of Theorem 1.
From Schur’s lemma and from (18), the inequality
and the relation (20) are obtained.
Based on these, relation (21) ensures the global asymptotic stability in the case of random switching for any input w square-integrable.
This is equivalent to choosing a Lyapunov function whose derivative .
Based on notation (22), the next relation is obtained:
and from this, by integrating , the relation (24) is obtained, which represents the conclusion of the proof of the theorem.
Let us consider , a simplex, i.e., and , and using the relation (18) accordingly, by applying Schur’s lemma we obtain the relation (20) in condensed form (25):
where
Under these conditions, norm of the system is less than for any α in the considered simplex.
The following are two examples that ensure a better understanding of what has been presented so far and of how the presentation continues.
3.1. Example 1
Let us consider a switching system described by the following subsystems defined by the matrices:
Using the Matlab environment, the eigenvalues are calculated as follows: eig(A1) = {−3, −1} and eig(A2) = {−2, −5}. The result is that A1 and A2 are Hurwitz matrices. By applying the relation (21), we obtain the next system:
Using the Matlab environment and YALMIP toolbox, the matrix P containing the solution to the system (28) is obtained as:
Since eig(P) = {0.1708, 0.2969}, matrix P is positive definite and ensures the global asymptotic stability of the switched systems defined by (27).
3.2. Example 2
Let us consider a switching system described by the following subsystems defined by the matrices:
Using the Matlab environment, the eigenvalues are calculated as eig(A1) = eig(A2) = {−1.0000 + 1.0000i, −1.0000 − 1.0000i} from which it results that A1 and A2 are Hurwitz matrices.
Following the above method, it is demonstrated that there is no matrix P > 0 which verifies the system (28). Thus, the above theorem cannot be applied and it cannot be stated that the switched system described by (30) is stable even if the two subsystems are stable. This proves once again that local stability does not imply global stability, and the conditions imposed by a system such as (28) are too restrictive. In contrast, Theorem 2, below, has more restrictive conditions but ensures the stability of the switched systems [24].
First, the term dwell time is described by the following definition [25,26,27]:
Definition 1.
Ifso that
then T is called dwell time of the switched systems.
Theorem 2.
Assume that for there is a set of positive definite matricesof corresponding dimensions, so as to fulfill the inequalities:
Under these conditions, the time switching control law where tk and tk+1 are successive switching moments so that ensures the global asymptotic stability of the switched system.
Proof of Theorem 2.
A draft of the demonstration consists in the fact that by choosing a Lyapunov function
and calculating its derivative, the next relation is obtained:
From this, α > 0 and β > 0 so that
By exploiting the relation (33) the next form can be obtained:
This results in so that
From relations (36) and (38) the global asymptotic stability of the switched system is obtained. It can be pointed out that inequalities (32) and (33) are known as Lyapunov–Metzler inequalities.
A number of ways of estimating the dwell time of the switched systems are presented in [26,27], where we propose an estimate used in practical examples. An upper limit for the minimum dwell time T* is given by T* , where
Evidently, by using the above theorems, the stability of a switched system can be demonstrated if the switching signal does not switch more often than the dwell time. In terms of establishing a control law of a switched system, similarly to the way the above Lyapunov functions have been chosen, corresponding control laws can be obtained for the closed loop system.
4. Numerical Simulations for PMSM Control Switched Systems
For the PMSM control in the classical structure (Figure 1), the so-called FOC control strategy, with the outer speed control loop supplying the references for the inner id and iq current control loops, Figure 2 shows the implementation in Matlab/Simulink, noting that the current reference idref is set to 0 for the maximization of the electromagnetic torque Te.
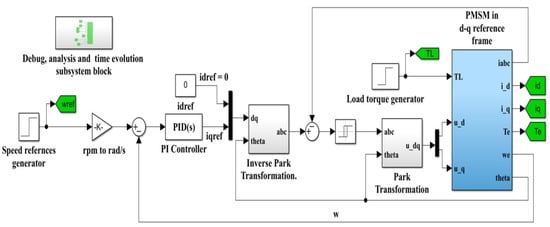
Figure 2.
Simulink implementation for PMSM control system based on FOC-type strategy.
Usually, the controllers of the two inner current control loops and the controller of the outer PMSM rotor speed control loop are of PI type.
Below the numerical simulations are presented for the control system of a PMSM, with nominal parameters as given in Table 1.

Table 1.
PMSM nominal parameters.
Figure 3 shows the evolution of the parameters of interest (rotor speed noted with ω, electromagnetic and load torques noted with Te and TL, stator currents noted with ia, ib, ic, and d-q frame currents noted with id and iq) of the PMSM control system based on the classic FOC control structure with PI-type controllers, following the numerical simulations by applying two-step signals for the speed reference ωref = [800, 1200] rpm and a load torque TL of 0.5 Nm. It can be noted that the PMSM control system demonstrates good performance.
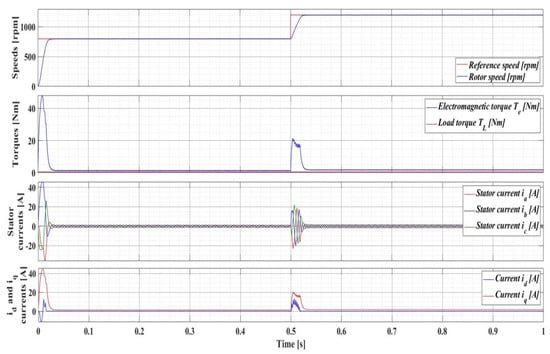
Figure 3.
Time evolution parameters of the PMSM control system based on FOC-type strategy: ωref = [800, 1200] rpm and TL = 0.5 Nm.
In addition, Figure 4, Figure 5 and Figure 6 show the evolution of the PMSM control system states (ω PMSM rotor speed, iq current, and id current) in the form of the phase plan for their corresponding combinations.
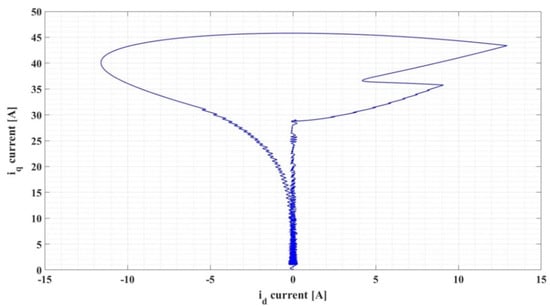
Figure 4.
Image of the phase plan: iq current versus id current.
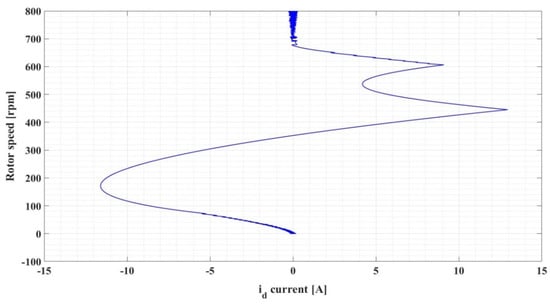
Figure 5.
Image of the phase plan: rotor speed versus id current.
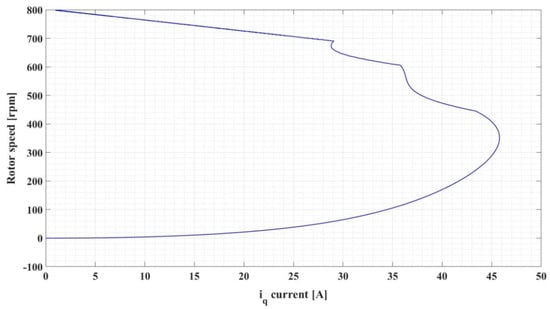
Figure 6.
Image of the phase plan: rotor speed versus iq current.
Moreover, for two successive steps of the PMSM reference speed, Figure 7 and Figure 8 show the evolution in state plane. It can be noted that the steady-state conditions are achieved after a relatively fast transient regime and damped oscillations.
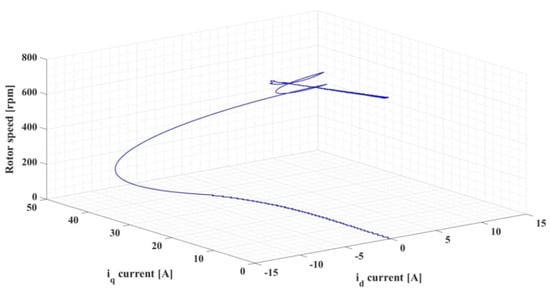
Figure 7.
Image of the state space: rotor speed versus iq current versus id current (ωref = 800 rpm).
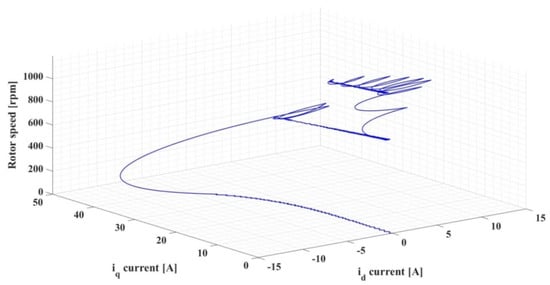
Figure 8.
Image of the state space: rotor speed versus iq current versus id current (ωref = [800, 1200] rpm).
In the case of the PMSM control, it can be noted that a number of its parameters may vary. These include stator resistance Rs, stator inductances Ld and Lq, but also combined inertia of PMSM rotor and load J.
Thus, using the notions described in Section 3 for switched systems, it is possible to achieve a qualitative study on the behavior of the PMSM control system in case of parametric variation.
Thus, Figure 9 shows the general block diagram for PMSM control system based on FOC-type strategy and switched systems.
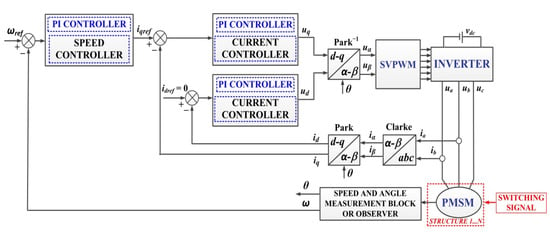
Figure 9.
General block diagram for PMSM control system based on FOC-type strategy and switched systems.
The parametric structure of the PMSM is considered to change over time, and the time points at which these changes occur are correlated with an external signal called the switching signal.
Thus, Figure 10 and Figure 11 show the Matlab/Simulink implementation for PMSM control system based on FOC-type strategy for PMSM variable structure with switching signal type 1.
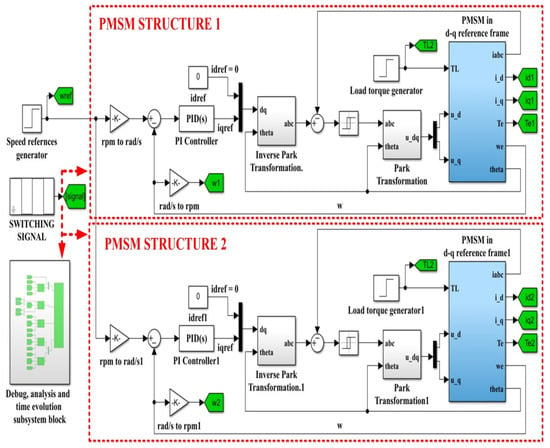
Figure 10.
Simulink implementation for PMSM control system based on FOC-type strategy for PMSM variable structure with switching signal type 1.
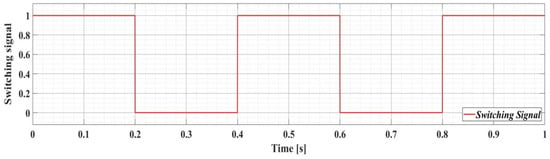
Figure 11.
Switching signal type 1.
It is considered that the variation of the PMSM parameters corresponds to that shown in Table 2.
Table 2.
PMSM variation parameters—variable structure 1.
For the verification of Lyapunov–Metzler inequalities, Figure 12 shows the diagram of a program implemented in Matlab using the YALMIP toolbox.
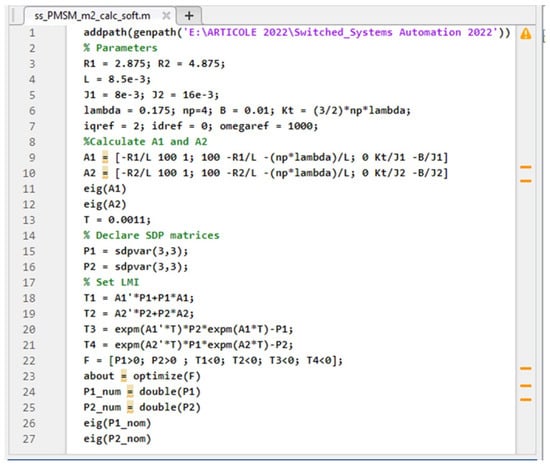
Figure 12.
Matlab program for matrices Ai and Pi determination—variable structure 1.
The matrices A1 and A2 are obtained similarly to the following relations (40):
Using the Matlab environment, the eigenvalues are calculated as follows: eig(A1) = {−426.1689, −209.2358, −42.316}, and eig(A2) = {−669.5222 −467.6463, −10.5154}. This results in A1 and A2 being Hurwitz matrices.
Using the Matlab environment and YALMIP toolbox, the matrices P1 and P2 containing the solution to the system are obtained as follows:
Since eig(P1) = {0.001, 0.0022, 0.0252} and eig(P2) = {0.0006, 0.001, 0.1119}, matrices P1 and P2 are positive definite and the global asymptotic stability of the PMSM control switched systems is ensured.
The Matlab program shown in Figure 13 is used to calculate the dwell time. A dwell time T = 1.1 ms is obtained.
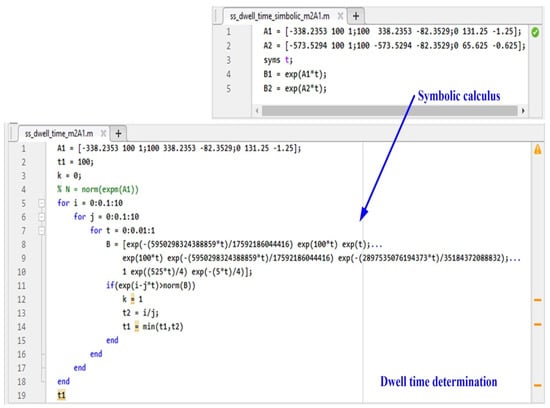
Figure 13.
Matlab program for dwell time determination—variable structure 1.
This is used to demonstrate that in terms of the PMSM control switched systems, system stability is ensured if switching between systems is performed at time intervals at least equal to the dwell time of 1.1 ms.
Using Matlab/Simulink, numerical simulations are presented in Figure 14, for the time evolution parameters of the PMSM control switched systems based on FOC-type strategy and switched systems with switching signal type 1, ωref = [800, 1200] rpm, and TL = 0.5 Nm.
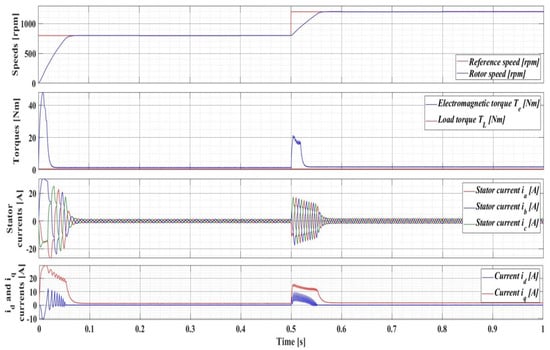
Figure 14.
Time evolution parameters for PMSM control system based on FOC-type strategy for PMSM variable structure with switching signal type 1, ωref = [800, 1200] rpm, and TL = 0.5 Nm.
Furthermore, Figure 15, Figure 16 and Figure 17 show the evolution of the states of the PMSM control switched systems (ω, iq, id) in the form of the phase plane for their corresponding combinations. In addition, for two successive PMSM reference speed steps, Figure 18 and Figure 19 show the evolution in the state plane for the PMSM control switched systems. It can be noted that the steady-state conditions are achieved after a relatively fast transient regime and damped oscillations.
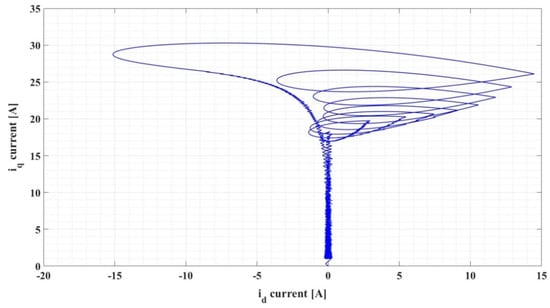
Figure 15.
Image of the phase plan for PMSM variable structure with switching signal type 1: iq current versus id current.
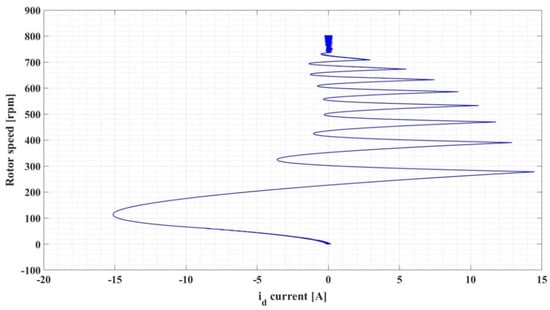
Figure 16.
Image of the phase plan for PMSM variable structure with switching signal type 1: rotor speed versus id current.
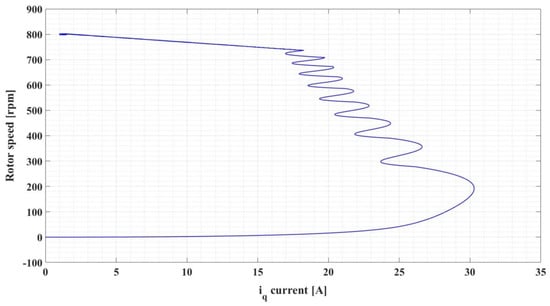
Figure 17.
Image of the phase plan for PMSM variable structure with switching signal type 1: rotor speed versus iq current.
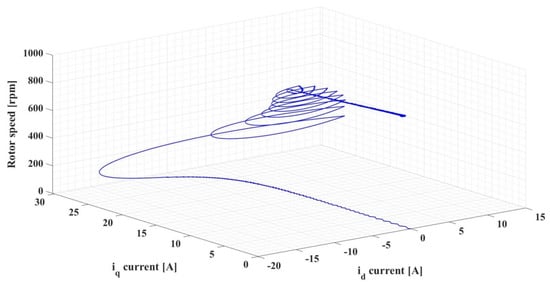
Figure 18.
Image of the state space for PMSM variable structure with switching signal type 1: rotor speed versus iq current versus id current (ωref = 800 rpm).
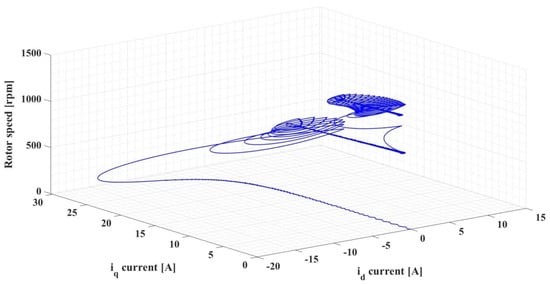
Figure 19.
Image of the state space for PMSM variable structure with switching signal type 1: rotor speed versus iq current versus id current (ωref = [800, 1200] rpm).
Next, it is considered that the variation of the PMSM parameters corresponds to that shown in Table 3.
Table 3.
PMSM variation parameters—variable structure 2.
Figure 20 presents the Simulink implementation for control switched systems of PMSM based on FOC-type strategy for variable structure with switching signal type 2. The Stateflow Matlab implementation detail for PMSM variable structure used for parameter selection from debug, analysis and time evolution subsystem from Figure 20 is presented in Figure 21.
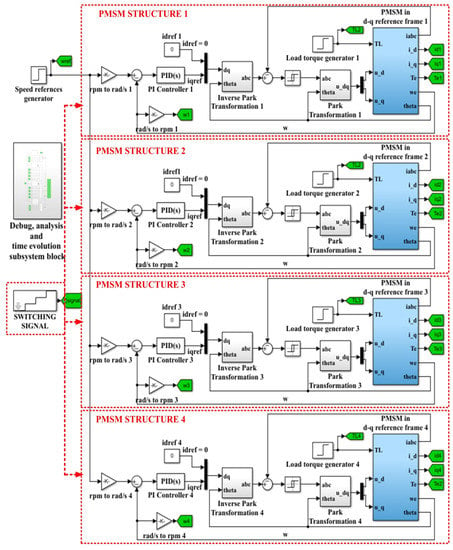
Figure 20.
Simulink implementation for PMSM control system based on FOC-type strategy for PMSM variable structure with switching signal type 2.
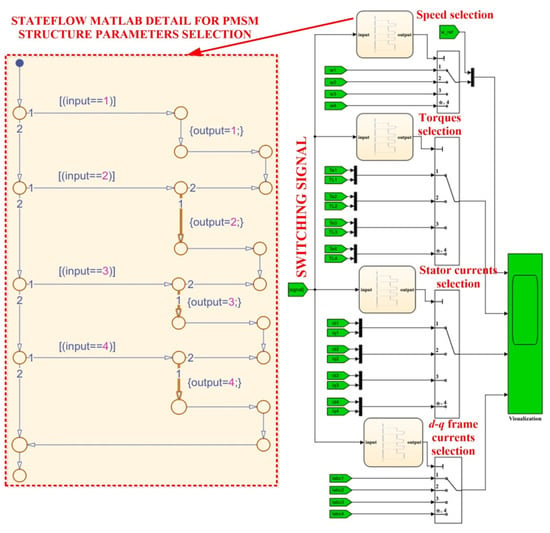
Figure 21.
Stateflow Matlab implementation detail for PMSM variable structure used for parameters selection from debug, analysis and time evolution subsystem.
The evolution of the switching signal type 2 is presented in Figure 22.
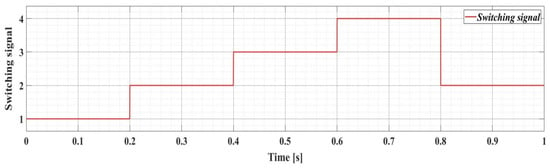
Figure 22.
Switching signal type 2.
For the verification of Lyapunov–Metzler inequalities, Figure 23 shows the diagram of a program implemented in Matlab using the YALMIP toolbox.
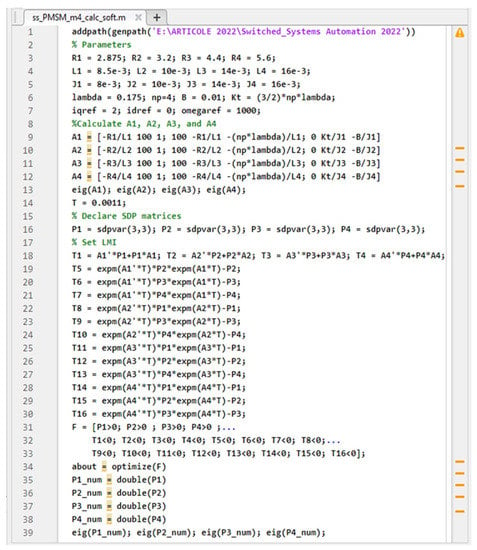
Figure 23.
Matlab program for matrices Ai and Pi determination—case 2.
The matrices A1, A2, A3, and A4 are given by relations (42) and (43):
Using the Matlab environment, the eigenvalues are calculated as follows: eig(A1) = {−426.1689, −209.2358, −42.316}, eig(A2) = {−411.3163, −200.1138, −29.5699}, eig(A3) = {−409.7148, −204.8635, −14.7075}, and eig(A4) = {−446.7605, −244.064, −9.8005}. As a result, A1, A2, A3, and A4 are Hurwitz matrices.
Using the Matlab environment and YALMIP toolbox, the matrices P1, P2, P3, and P4 containing the solution to the system are obtained as follows:
Since eig(P1) = {0.0311, 0.0730, 0.6860}, eig(P2) = {0.0326, 0.0795, 0.7539}, eig(P3) = {0.0326, 0.0801, 0.6463}, and eig(P4) = {0.0278, 0.0656, 0.4434}, matrices Pi are positive definite and the global asymptotic stability of the PMSM control switched systems is ensured.
Moreover, for this variable structure with switching signal 2, the Matlab program shown in Figure 24 is also used to calculate the dwell time.
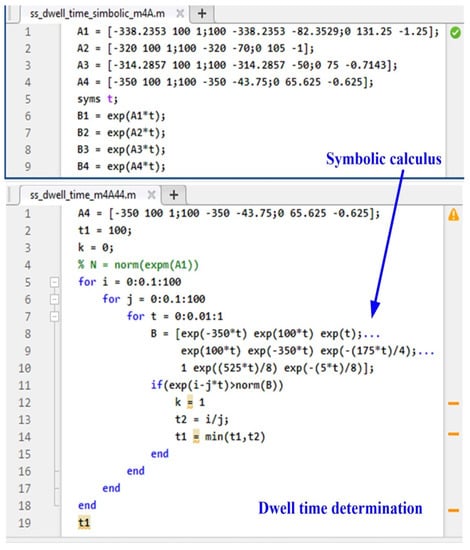
Figure 24.
Matlab program for dwell time determination—variable structure 2.
The dwell time T = 1.1 ms. This have been used to demonstrate that, in terms of the PMSM control switched systems (variable structure type 2), system stability is ensured if switching between systems is performed at time intervals at least equal to the dwell time of 1.1 ms.
The time evolution for PMSM control system based on FOC-type strategy for PMSM variable structure with switching signal type 2, ωref = [800, 1200] rpm, and TL = 0.5 Nm is presented in Figure 25.
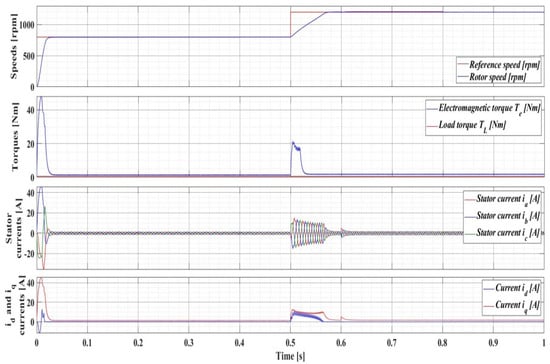
Figure 25.
Time evolution for PMSM control system based on FOC-type strategy for PMSM with variable structure and switching signal type 2, ωref = [800 1200] rpm, and TL = 0.5 Nm.
Figure 26, Figure 27, Figure 28, Figure 29, Figure 30 and Figure 31 show the evolution of the states of the PMSM control switched systems with variable structure and switching signal type 2 (ω, iq, id) in the form of the phase plane for ωref = 800 rpm and ωref = [800, 1200] rpm, respectively.
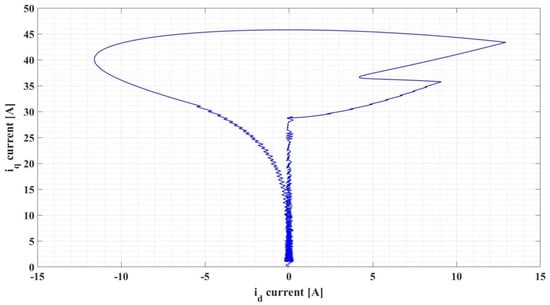
Figure 26.
Image of the phase plan for PMSM variable structure with switching signal type 2: iq current versus id current (ωref = 800 rpm).
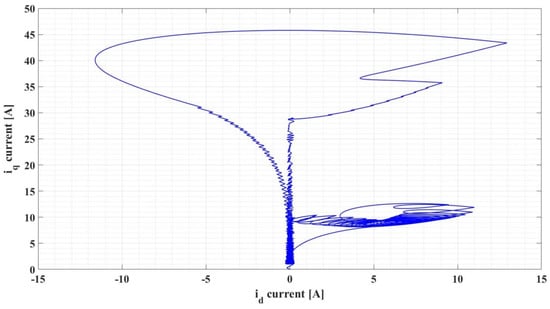
Figure 27.
Image of the phase plan for PMSM variable structure with switching signal type 2: iq current versus id current (ωref = [800, 1200] rpm).
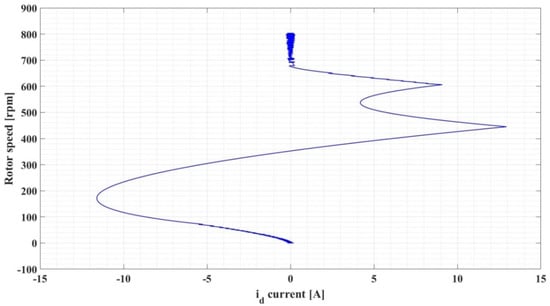
Figure 28.
Image of the phase plan for PMSM variable structure with switching signal type 2: rotor speed versus id current (ωref = 800 rpm).
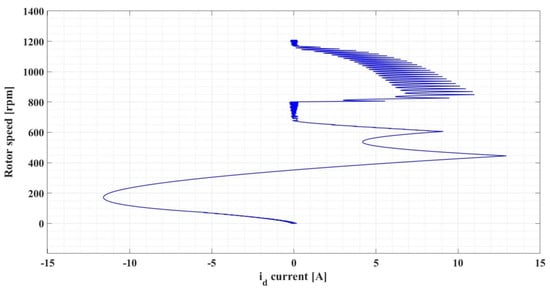
Figure 29.
Image of the phase plan for PMSM variable structure with switching signal type 2: rotor speed versus id current (ωref = [800, 1200] rpm).
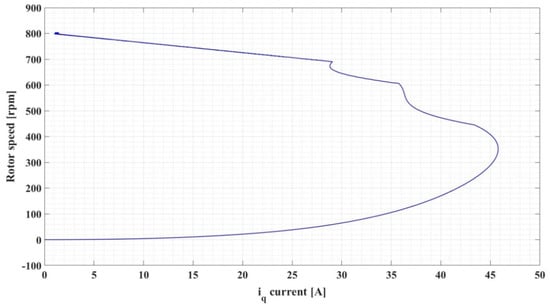
Figure 30.
Image of the phase plan for PMSM variable structure with switching signal type 2: rotor speed versus iq current (ωref = 800 rpm).
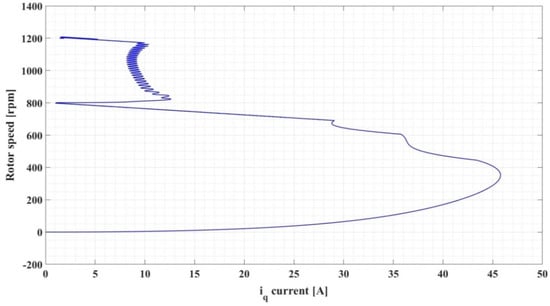
Figure 31.
Image of the phase plan for PMSM variable structure with switching signal type 2: rotor speed versus iq current (ωref = [800, 1200] rpm).
For two successive reference speed steps of PMSM ωref = [800, 1200] rpm, Figure 32 and Figure 33 show the evolution in the state plane for the PMSM control switched systems with variable structure and switching signal type 2.
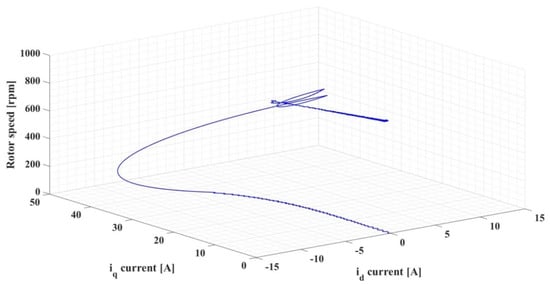
Figure 32.
Image of the state space for PMSM variable structure with switching signal type 2: rotor speed versus iq current versus id current (ωref = 800 rpm).
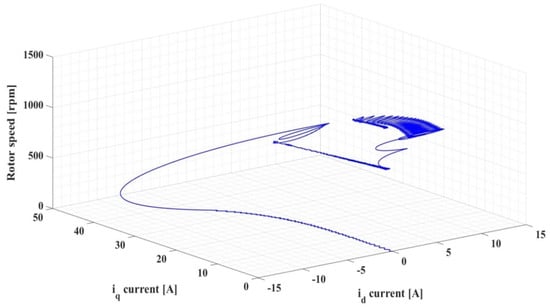
Figure 33.
Image of the state space for PMSM variable structure with switching signal type 2: rotor speed versus iq current versus id current (ωref = [800, 1200] rpm).
It can be noted that the steady-state conditions are achieved after a relatively fast transient regime and damped oscillations.
Moreover, as in the case of variable structure and switching signal type 1, compared to the evolution of the states for the PMSM control system where the parameters remain constant (case presented at the beginning of Section 4), slight additional oscillations are noted due to the switching between the various parametric structures of the PMSM, preserving stability and overall performance without affecting the qualitative picture of the evolution of the system given by the state space.
In synthesis in this section, three examples are considered: the model of a PMSM controlled with FOC, the model of a PMSM in which the parametric variations contribute to the definition of two PMSM models, and the model of a PMSM in which the parametric variations contribute to the definition of four PMSM models. After calculating the dwell time and checking the Lyapunov–Metzler inequalities, the conclusion of PMSM stability can be drawn using switched systems theory. On the other hand, just to confirm the results obtained using the FOC strategy, the state space portraits are presented for the qualitative analysis of the system’s behavior, confirming the stability and parametric robustness of the system.
According to Example 2 in Section 3, it is proven once again that local stability does not imply global stability, in the sense that although each subsystem is stable, the evolution of the entire switched systems can be unstable. This means that although using the classic methods of stability analysis mentioned above, each subsystem is stable, but the mode of transition between these systems is not taken into consideration, thus implying that the switched systems could be unstable. This discrepancy in the analysis of the stability of the switched systems is resolved by specific means, namely by introducing the notion of dwell time and solving the Lyapunov–Metzler type inequalities.
It can be concluded that, by using the switched systems theory in the presented example of PMSM control, the FOC control strategy is a control strategy that ensures parametric robustness, in the sense that in case of significant variations of the parameters in the PMSM structure, the overall performance of the control system is preserved both qualitatively and quantitatively.
5. Conclusions
Usually, the parameters of a PMSM vary over time, and the study of the parametric robustness of the PMSM control systems becomes an important step in the chain of control system design. Using switched-systems theory, elements have been presented regarding the demonstration of the stability of switched systems by solving Lyapunov–Metzler inequalities, where the switching signal frequency is lower than the switching frequency given by the dwell time. An algorithm for calculating the dwell time has also been defined and presented. Numerical simulations performed in Simulink validate the fact that, for parametric variations of the PMSM structure, the PMSM control switched systems preserve the qualitative performance in terms of its control. A series of Matlab programs based on the YALMIP toolbox for obtaining Pi matrices and dwell time are presented to demonstrate the stability and performance of the PMSM control switched systems. In this paper, the stability demonstration was achieved using elements of the switched systems theory, while the PMSM control structure was a predefined FOC structure. In future papers, we will propose the implementation of control laws whose synthesis is derived from specific elements of the switched-systems theory. Moreover, one of our directions of research will involve the study of approximate controllability of fractional integrodifferential equations using resolvent operators [35].
Author Contributions
Conceptualization, M.N.; data curation, M.N. and D.S.; formal analysis, M.N., C.-I.N., D.S. and C.I.; funding acquisition, M.N.; investigation, M.N., C.-I.N. and D.S.; methodology, M.N., C.-I.N., D.S. and C.I.; project administration, M.N.; resources, M.N., C.-I.N. and D.S.; software, M.N. and C.-I.N.; supervision, M.N., D.S. and C.I.; validation, M.N. and C.-I.N.; visualization, M.N., C.-I.N., D.S. and C.I.; writing—original draft, M.N. and C.-I.N.; writing—review and editing, M.N. and C.-I.N. All authors have read and agreed to the published version of the manuscript.
Funding
This work was developed with funds from the Ministry of Research, Innovation, and Digitization of Romania as part of the NUCLEU Program: PN 19 38 01 03.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| PMSM | Permanent Magnet Synchronous Motor |
| FOC | Field Oriented Control |
| DTC | Direct Torque Control |
| YALMIP | A toolbox for modeling and optimization in MATLAB |
| Rs | Stator resistance of the PMSM |
| Rd and Rq | Stator resistances on d-q axis |
| Ld and Lq | Stator inductances on d-q axis |
| ud and uq | Stator voltages on d-q axis |
| id and iq | Stator currents on d-q axis |
| TL | Load torque |
| J | Combined inertia of PMSM rotor and load |
| B | Combined viscous friction of PMSM rotor and load |
| λ0 | Flux induced by the permanent magnets of the rotor in the stator phases |
| np | Pole pairs number |
| ω | PMSM rotor speed |
References
- Wang, S.-C.; Nien, Y.-C.; Huang, S.-M. Multi-Objective Optimization Design and Analysis of V-Shape Permanent Magnet Synchronous Motor. Energies 2022, 15, 3496. [Google Scholar] [CrossRef]
- You, Y.-M. Optimal Design of PMSM Based on Automated Finite Element Analysis and Metamodeling. Energies 2019, 12, 4673. [Google Scholar] [CrossRef]
- Furmanik, M.; Gorel, L.; Konvičný, D.; Rafajdus, P. Comparative Study and Overview of Field-Oriented Control Techniques for Six-Phase PMSMs. Appl. Sci. 2021, 11, 7841. [Google Scholar] [CrossRef]
- Feng, S.; Jiang, W.; Zhang, Z.; Zhang, J.; Zhang, Z. Study of efficiency characteristics of Interior Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2018, 54, 8108005. [Google Scholar]
- Zakharov, V.; Minav, T. Analysis of Field Oriented Control of Permanent Magnet Synchronous Motor for a Valveless Pump-Controlled Actuator. Multidiscip. Digit. Publ. Inst. Proc. 2020, 64, 19. [Google Scholar]
- Jiang, W.; Han, W.; Wang, L.; Liu, Z.; Du, W. Linear Golden Section Speed Adaptive Control of Permanent Magnet Synchronous Motor Based on Model Design. Processes 2022, 10, 1010. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, T.; Wang, X.; Wang, X.; Wang, S.; Ni, Y. Performance Improvement for PMSM Driven by DTC Based on Discrete Duty Ratio Determination Method. Appl. Sci. 2019, 9, 2924. [Google Scholar] [CrossRef]
- Amin, F.; Sulaiman, E.B.; Utomo, W.M.; Soomro, H.A.; Jenal, M.; Kumar, R. Modelling and Simulation of Field Oriented Control based Permanent Magnet Synchronous Motor Drive System. Indones. J. Electr. Eng. Comput. Sci. 2017, 6, 387. [Google Scholar] [CrossRef]
- Qiu, H.; Zhang, H.; Min, L.; Ma, T.; Zhang, Z. Adaptive Control Method of Sensorless Permanent Magnet Synchronous Motor Based on Super-Twisting Sliding Mode Algorithm. Electronics 2022, 11, 3046. [Google Scholar] [CrossRef]
- Chen, H.; Yao, Z.; Liu, Y.; Lin, J.; Wang, P.; Gao, J.; Zhu, S.; Zhou, R. PMSM Adaptive Sliding Mode Controller Based on Improved Linear Dead Time Compensation. Actuators 2022, 11, 267. [Google Scholar] [CrossRef]
- Tang, M.; Zhuang, S. On Speed Control of a Permanent Magnet Synchronous Motor with Current Predictive Compensation. Energies 2019, 12, 65. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.-I. Sensorless Predictive Control for PMSM Using MRAS Observer. In Proceedings of the International Conference on Electromechanical and Energy Systems (SIELMEN), Craiova, Romania, 9−11 October 2019; pp. 1–7. [Google Scholar]
- Mayilsamy, G.; Natesan, B.; Joo, Y.H.; Lee, S.R. Fast Terminal Synergetic Control of PMVG-Based Wind Energy Conversion System for Enhancing the Power Extraction Efficiency. Energies 2022, 15, 2774. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.-I. Sensorless Fractional Order Control of PMSM Based on Synergetic and Sliding Mode Controllers. Electronics 2020, 9, 1494. [Google Scholar] [CrossRef]
- Nicola, M.; Duta, M.; Nitu, M.; Aciu, A.; Nicola, C.-I. Improved System Based on ANFIS for Determining the Degree of Polymerization. Adv. Sci. Technol. Eng. Syst. J. 2022, 5, 664–675. [Google Scholar] [CrossRef]
- Hoai, H.-K.; Chen, S.-C.; Chang, C.-F. Realization of the Neural Fuzzy Controller for the Sensorless PMSM Drive Control System. Electronics 2020, 9, 1371. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.-I. Tuning of PI Speed Controller for PMSM Control System Using Computational Intelligence. In Proceedings of the 21st International Symposium on Power Electronics (Ee), Novi Sad, Serbia, 27−30 October 2021; pp. 1–6. [Google Scholar]
- Nicola, M.; Nicola, C.-I.; Selișteanu, D. Improvement of PMSM Sensorless Control Based on Synergetic and Sliding Mode Controllers Using a Reinforcement Learning Deep Deterministic Policy Gradient Agent. Energies 2022, 15, 2208. [Google Scholar] [CrossRef]
- Ullah, K.; Guzinski, J.; Mirza, A.F. Critical Review on Robust Speed Control Techniques for Permanent Magnet Synchronous Motor (PMSM) Speed Regulation. Energies 2022, 15, 1235. [Google Scholar] [CrossRef]
- Zhang, Q.; Yu, R.; Li, C.; Chen, Y.-H.; Gu, J. Servo Robust Control of Uncertain Mechanical Systems: Application in a Compressor/PMSM System. Actuators 2022, 11, 42. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Y. Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor. Appl. Sci. 2020, 10, 709. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X. Stability of Switched Systems with Time-Varying Delays under State-Dependent Switching. Mathematics 2022, 10, 2722. [Google Scholar] [CrossRef]
- Halanay, A.; Samuel, J. Differential Equations, Discrete Systems and Control: Economic Models (Mathematical Modelling: Theory and Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1997; pp. 15–123. [Google Scholar]
- Colaneri, P. Analysis and Control of Linear Switched Systems; The Polytechnic University of Milano: Milan, Italy, 2009; Available online: https://colaneri.faculty.polimi.it/Lucidi-Bertinoro-2009.pdf (accessed on 15 February 2022).
- Ren, W.; Xiong, J. Robust Filtering for 2-D Discrete-Time Switched Systems. IEEE Trans. Autom. Control 2021, 66, 4747–4760. [Google Scholar] [CrossRef]
- Ligang, W.; Rongni, Y.; Peng, S.; Xiaojie, S. Stability analysis and stabilization of 2-D switched systems under arbitrary and restricted switchings. Automatica 2015, 59, 206–215. [Google Scholar]
- Meng, F.; Shen, X.; Li, X. Stability Analysis and Synthesis for 2-D Switched Systems with Random Disturbance. Mathematics 2022, 10, 810. [Google Scholar] [CrossRef]
- Krok, M.; Hunek, W.P.; Feliks, T. Switching Perfect Control Algorithm. Symmetry 2020, 12, 816. [Google Scholar] [CrossRef]
- Nicola, C.-I.; Nicola, M. Real Time Implementation of the PMSM Sensorless Control Based on FOC Strategy. In Proceedings of the 4th Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 14−17 June 2022; pp. 179–183. [Google Scholar]
- Löfberg, J. Automatic robust convex programming. Optim. Methods Softw. 2022, 27, 115–129. [Google Scholar] [CrossRef]
- Besselmann, T.; Lofberg, J.; Morari, M. Explicit MPC for LPV Systems: Stability and Optimality. IEEE Trans. Autom. Control 2012, 57, 2322–2332. [Google Scholar] [CrossRef]
- Chandrasekaran, V.; Shah, P. Relative entropy optimization and its applications. Math. Program. Ser. A 2016, 161, 1–32. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the IEEE International Conference on Robotics and Automation (IEEE Cat. No.04CH37508), Taipei, Taiwan, 2−4 September 2004; pp. 284–289. [Google Scholar]
- Nicola, M.; Nicola, C.-I.; Ionete, C.; Şendrescu, D.; Roman, M. Improved Performance for PMSM Control Based on Robust Controller and Reinforcement Learning. In Proceedings of the 26th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19−21 October 2022; pp. 207–212. [Google Scholar]
- Vijayakumar, V.; Nisar, K.S.; Chalishajar, D.; Shukla, A.; Malik, M.; Alsaadi, A.; Aldosary, S.F. A Note on Approximate Controllability of Fractional Semilinear Integrodifferential Control Systems via Resolvent Operators. Fractal Fract. 2022, 6, 73. [Google Scholar] [CrossRef]

































Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).