
3GPP 5G V2X Scenarios: Performance of QoS Parameters Using Turbo Codes




Abstract
:1. Introduction and Related Work
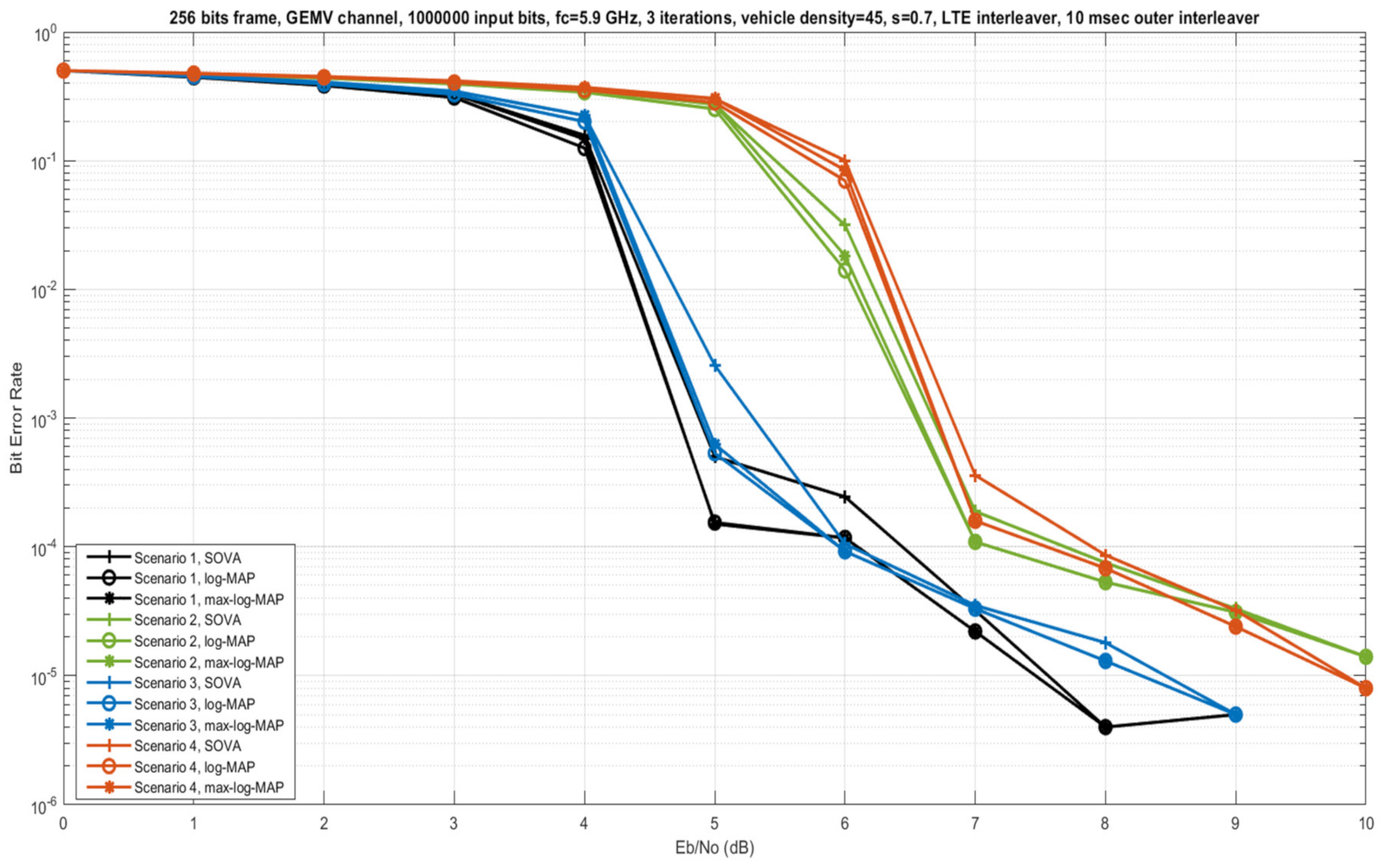
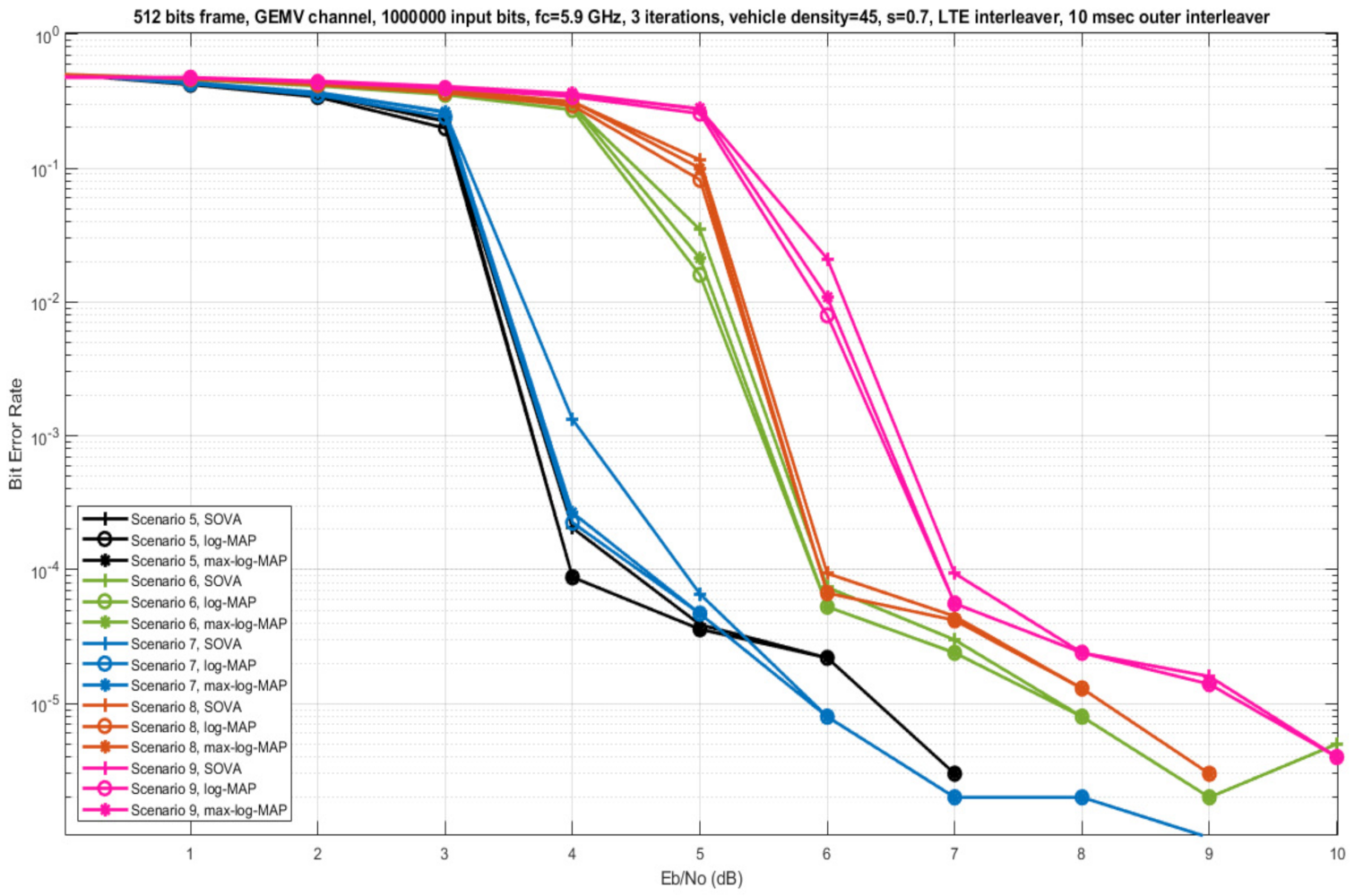
- Specific 3GPP 5G V2X scenarios of Release 16 are simulated applying the LTE turbo coding scheme, considering also different vehicle densities, vehicle speeds and frame sizes.
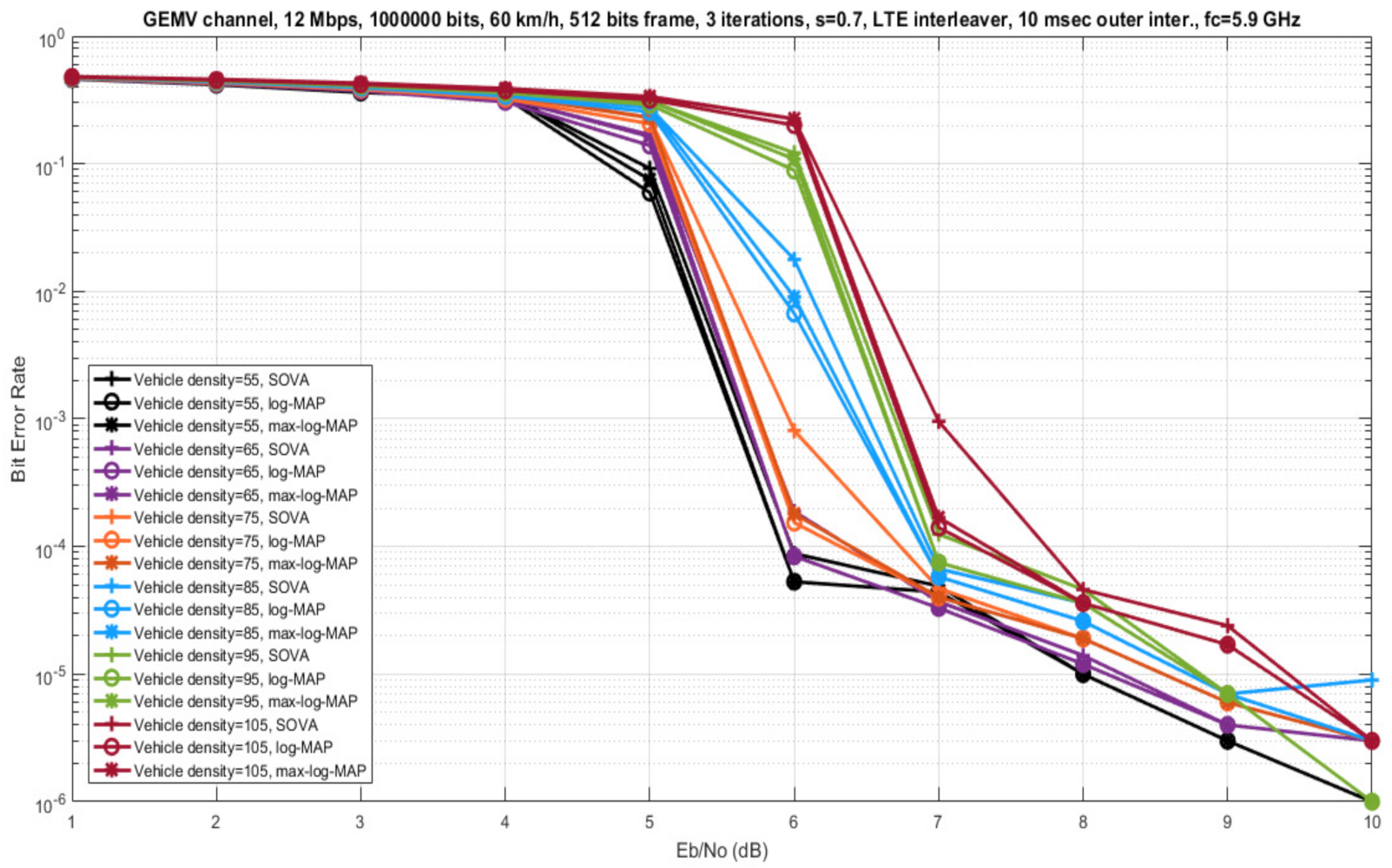
- For the implemented 3GPP V2X scenarios an optimization analysis was conducted for specific SNR values based on the channel decoding algorithm (log-MAP, max-log-MAP and SOVA). The aim is specific QoS specifications to be satisfied such as reliability, end-to-end latency and throughput.
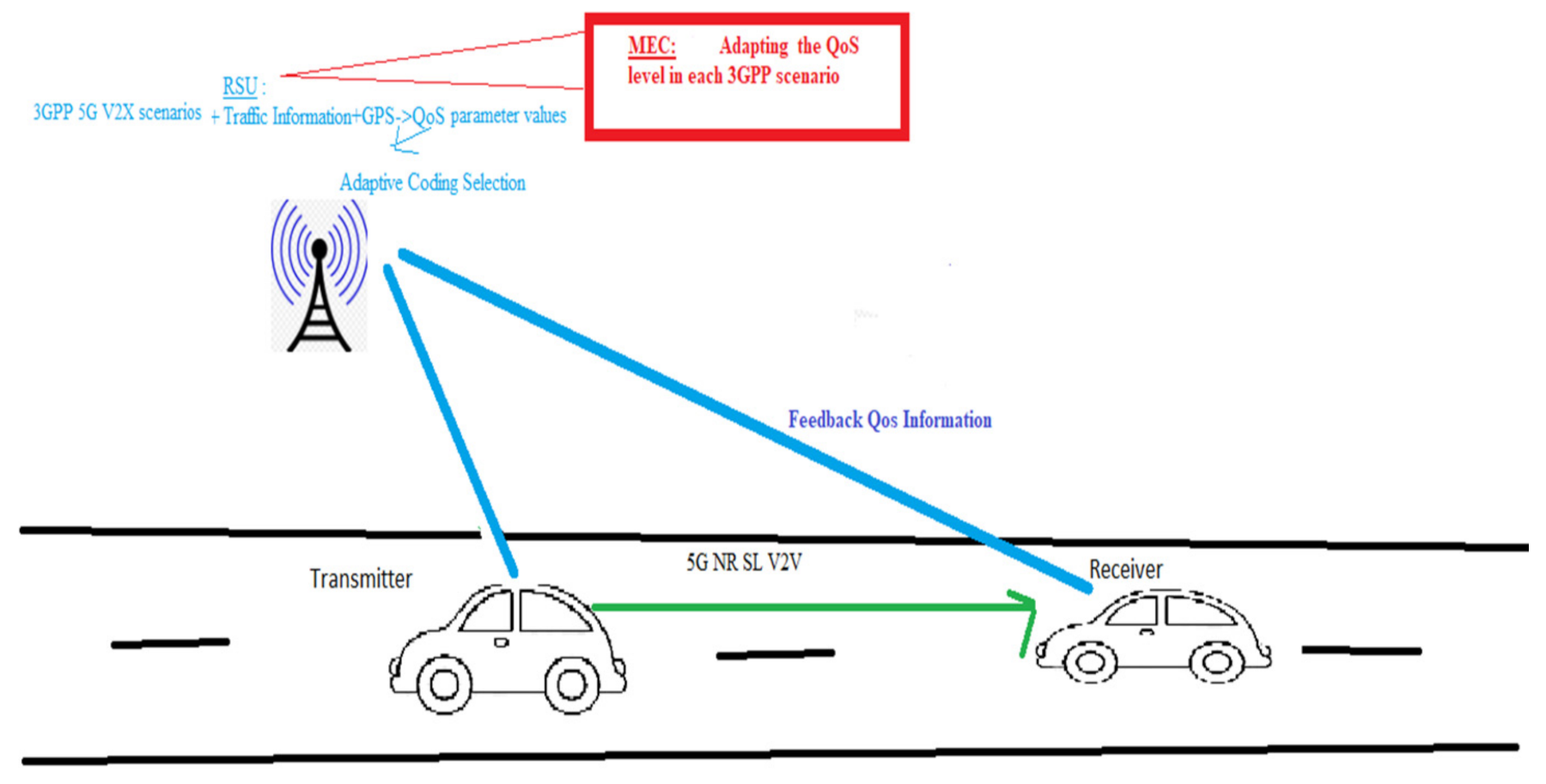
- Finally, the simulation results of this paper can be used as reference for the training of a future dynamic physical layer channel coding selection scheme (which emphasizes on selecting the appropriate turbo coding parameters). This scheme will do the selections on a multi−level QoS parameter indicator depending on the observed traffic conditions using a machine learning (ML) procedure.
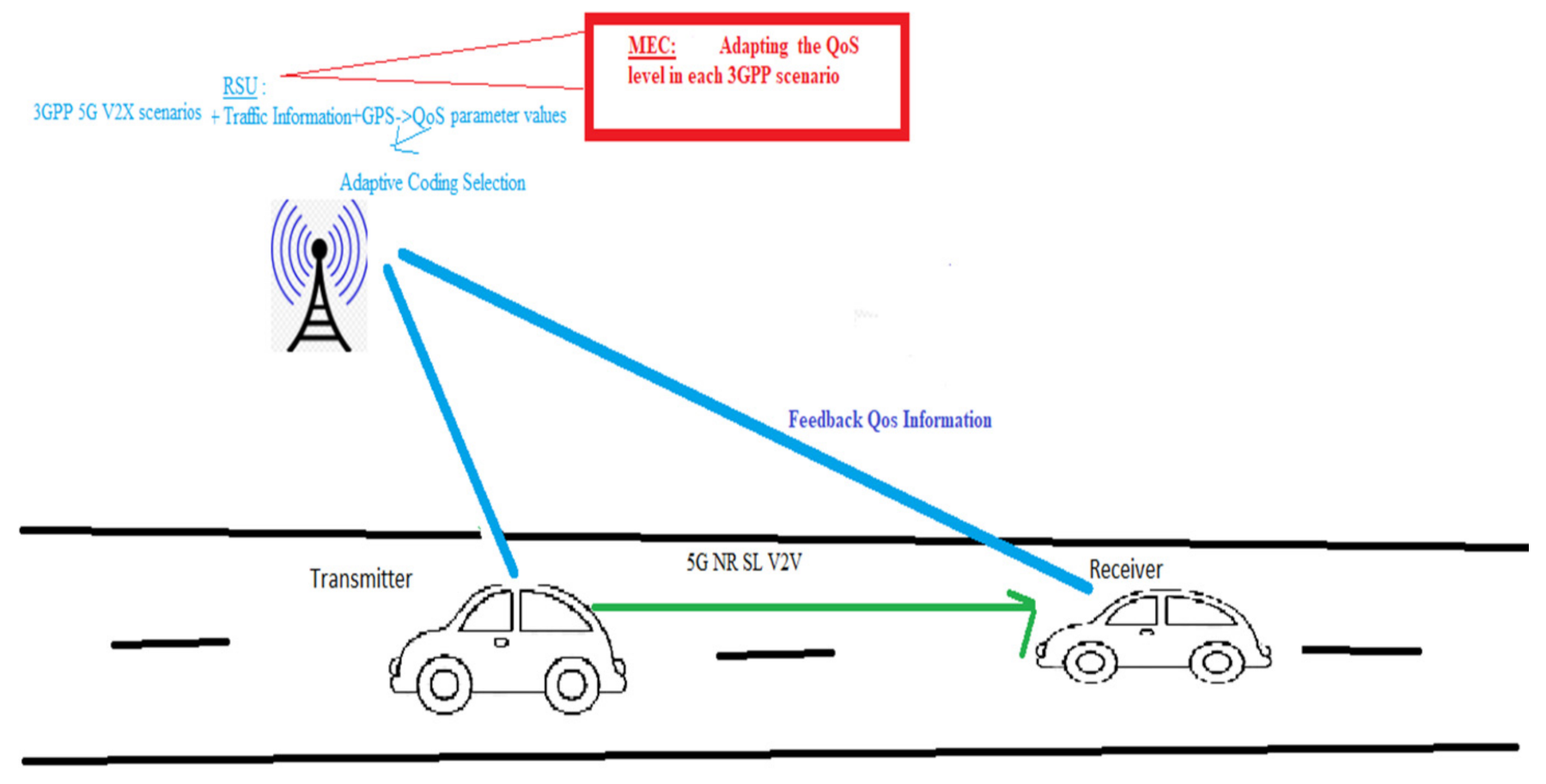
2. 3GPP 5G V2X QoS Scenarios and Proposed Dynamic System Model
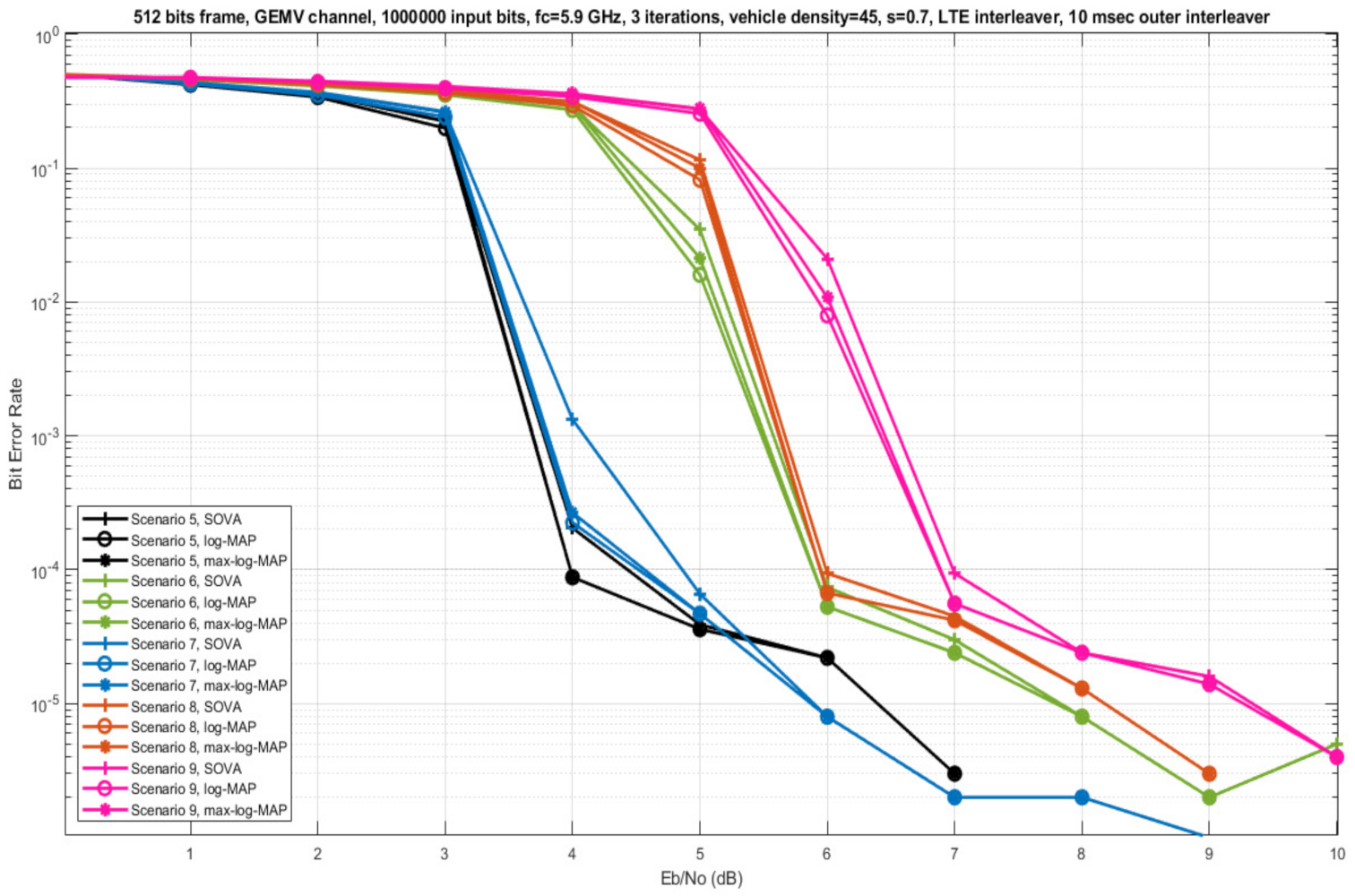
3. QoS Analysis
3.1. Data Rate per Vehicle and Mobile Terminal Speed QoS Parameters
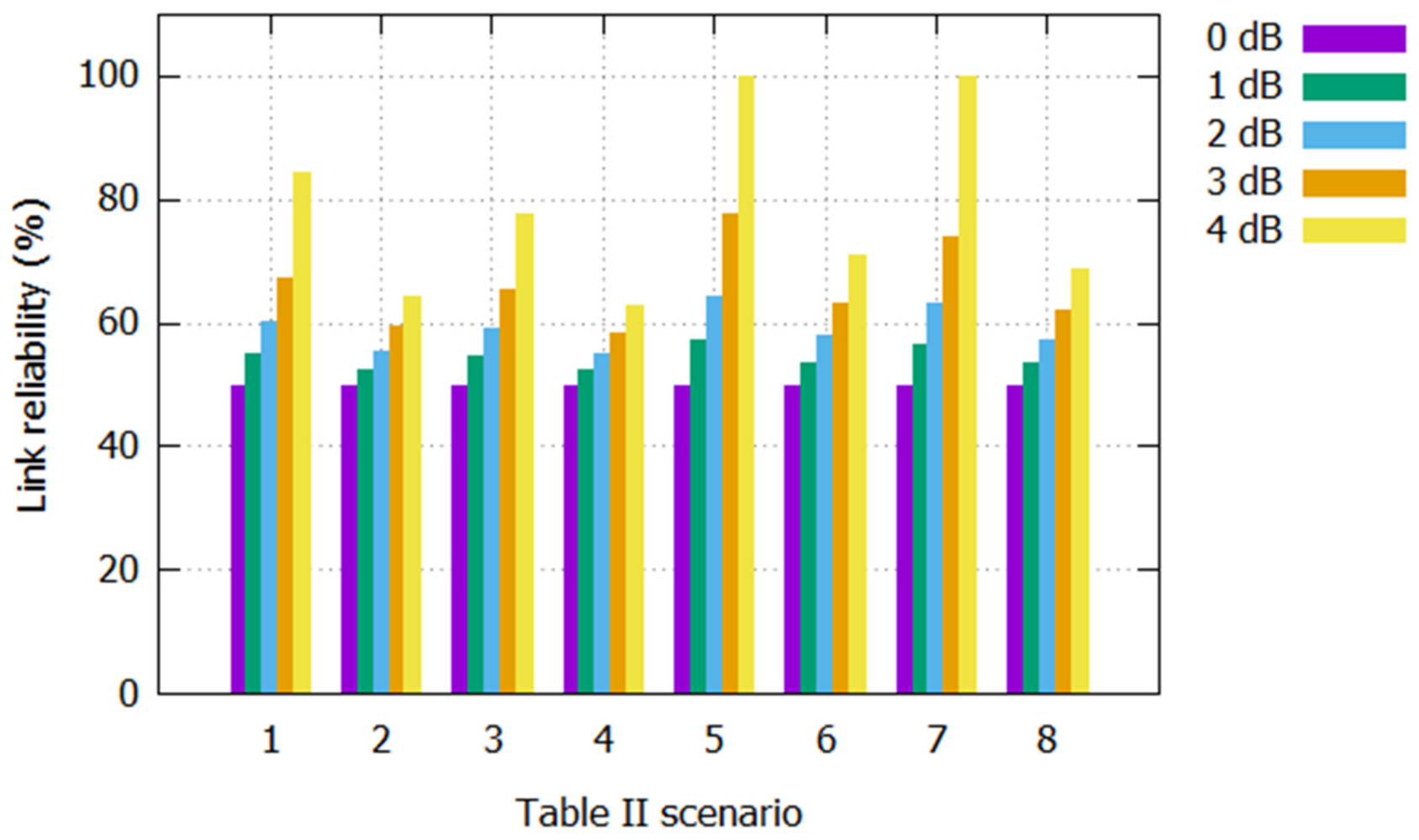
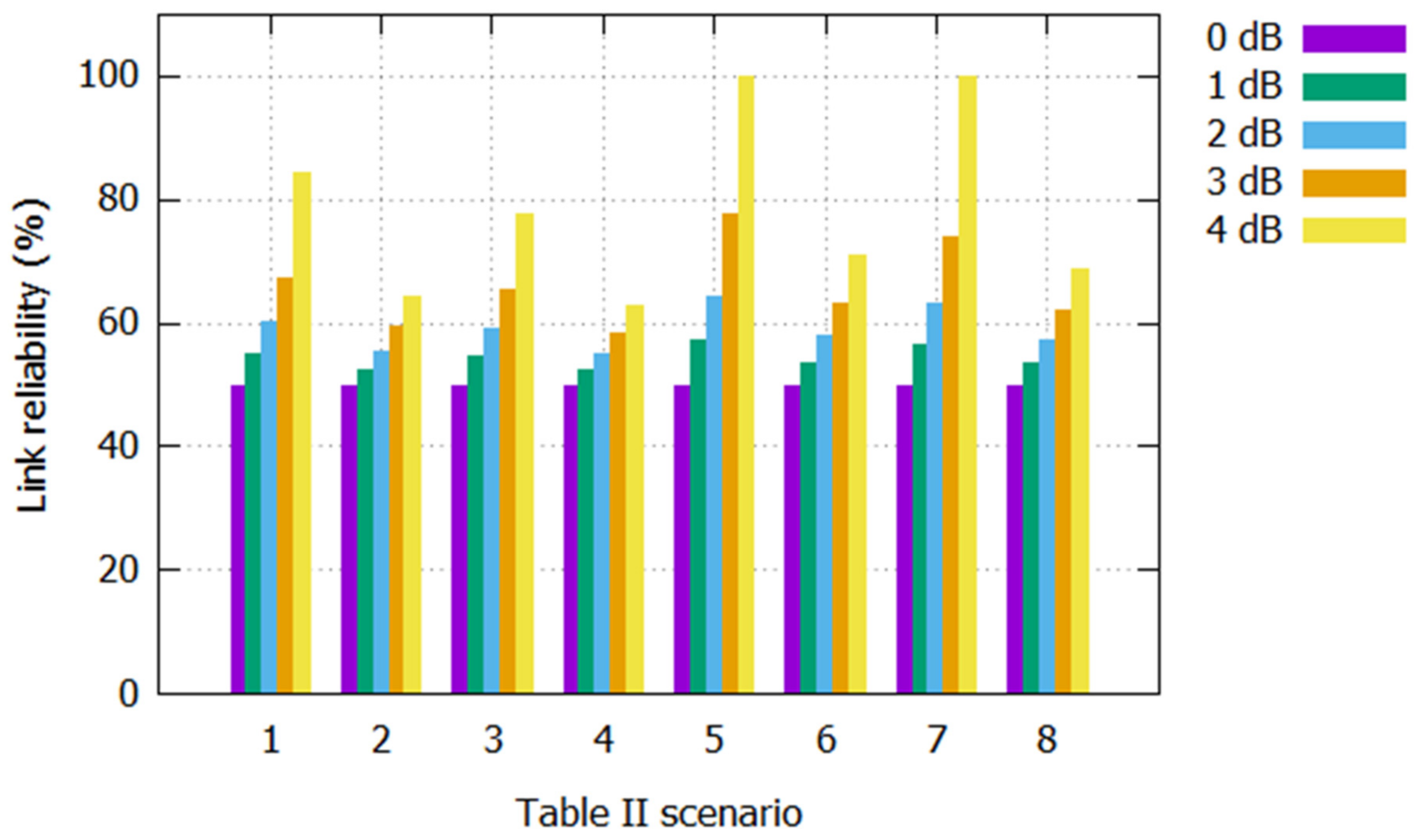
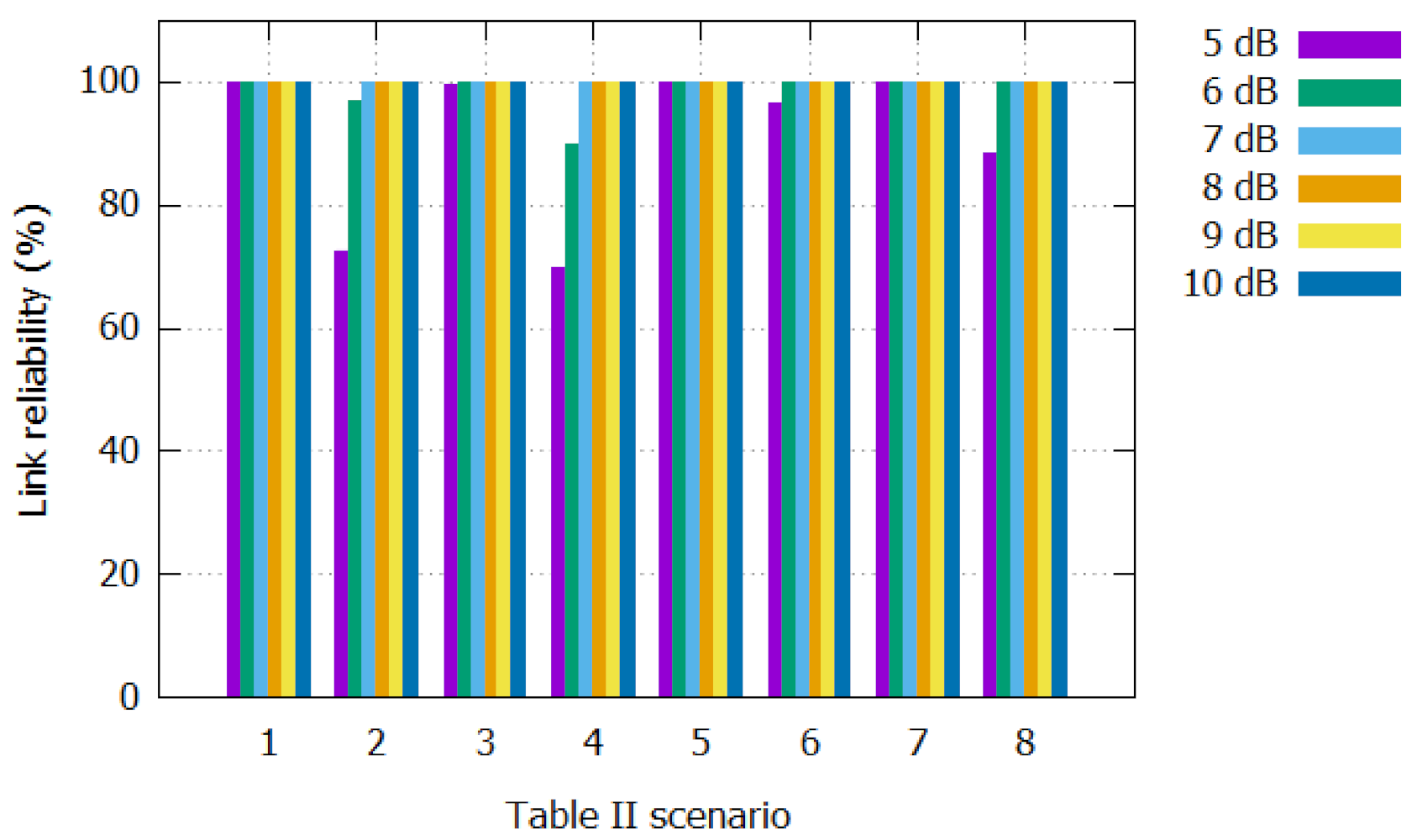
3.2. Link Reliability QoS Parameter
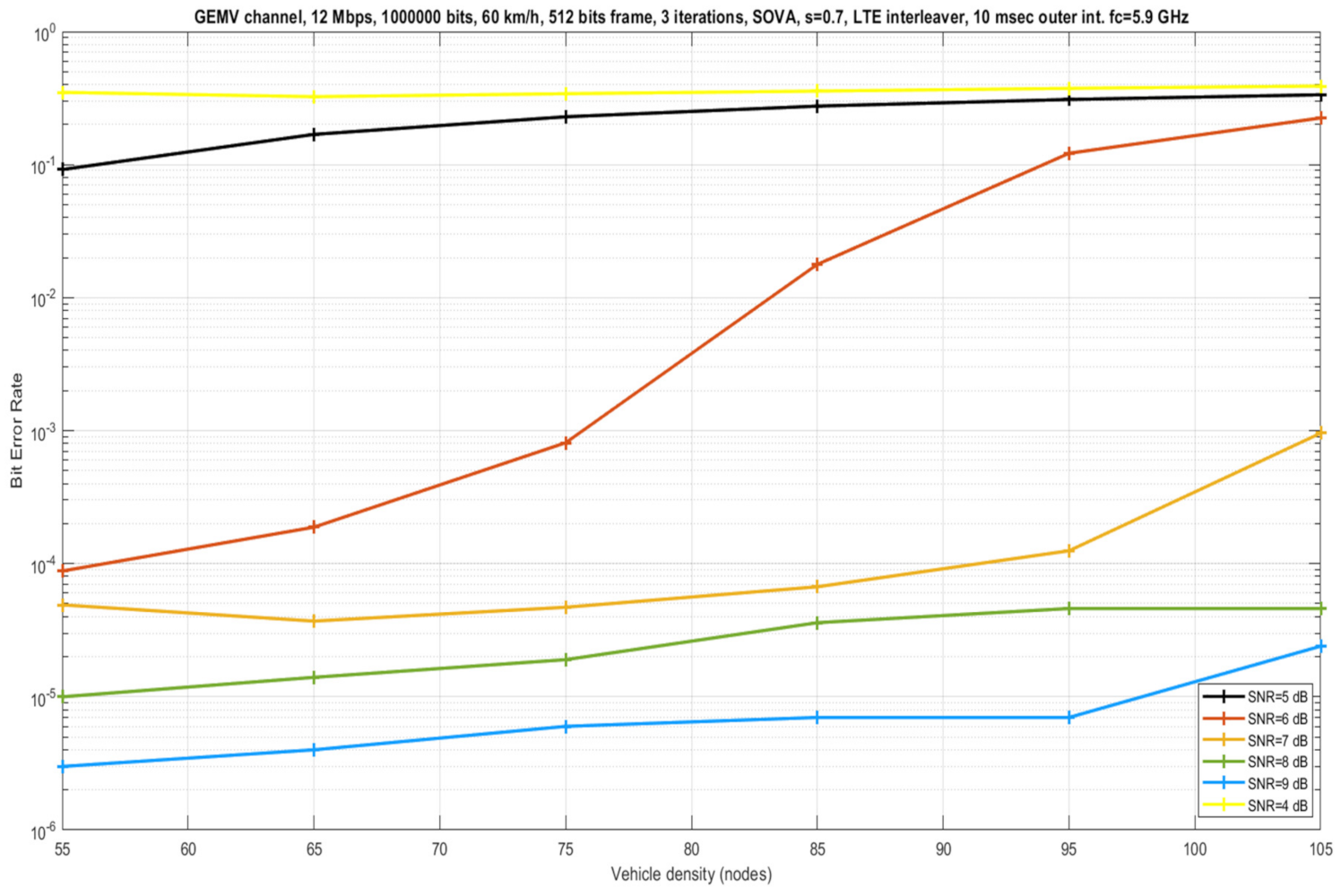
3.3. Traffic (Vehicle) Density Evaluation
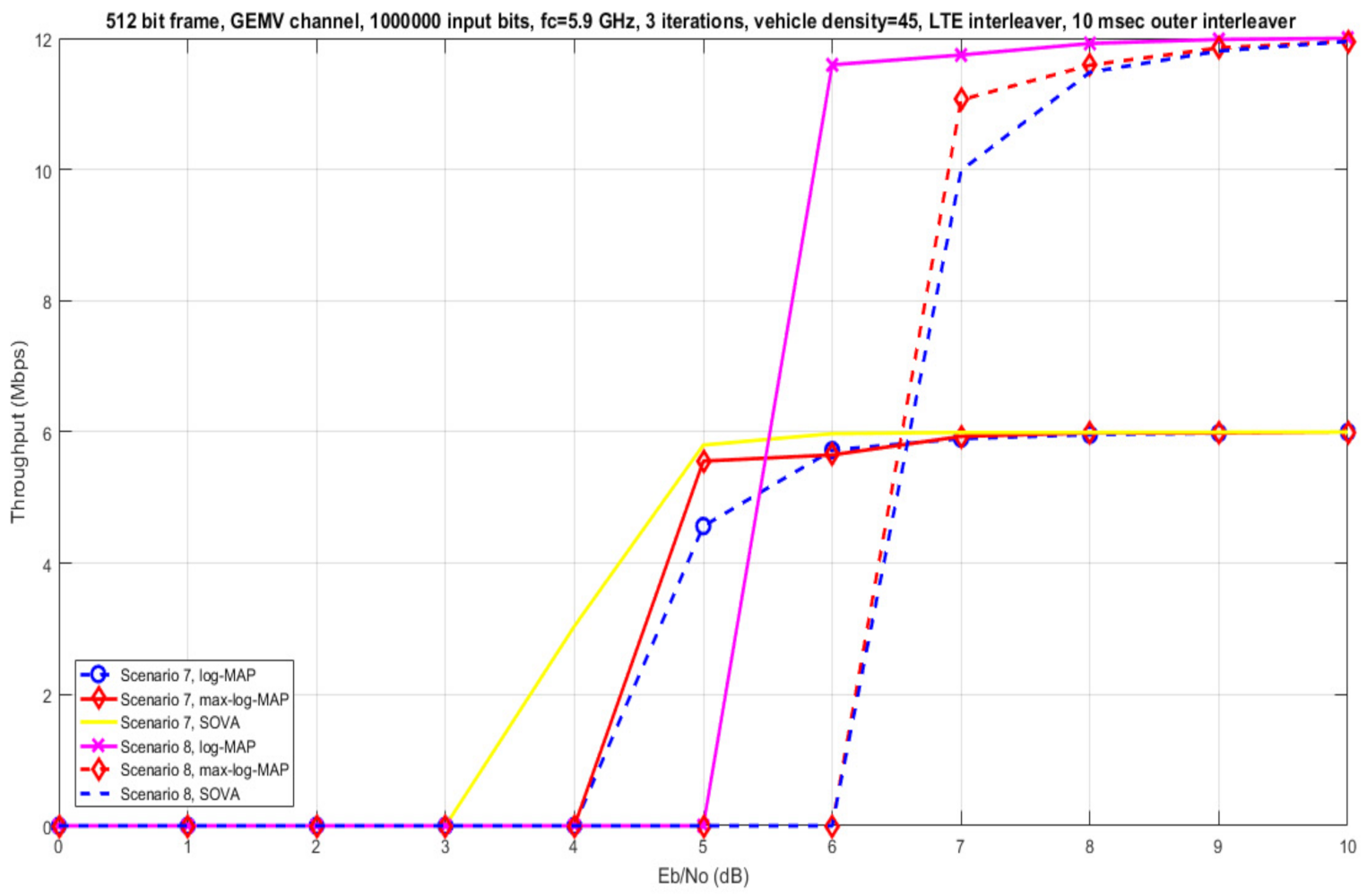
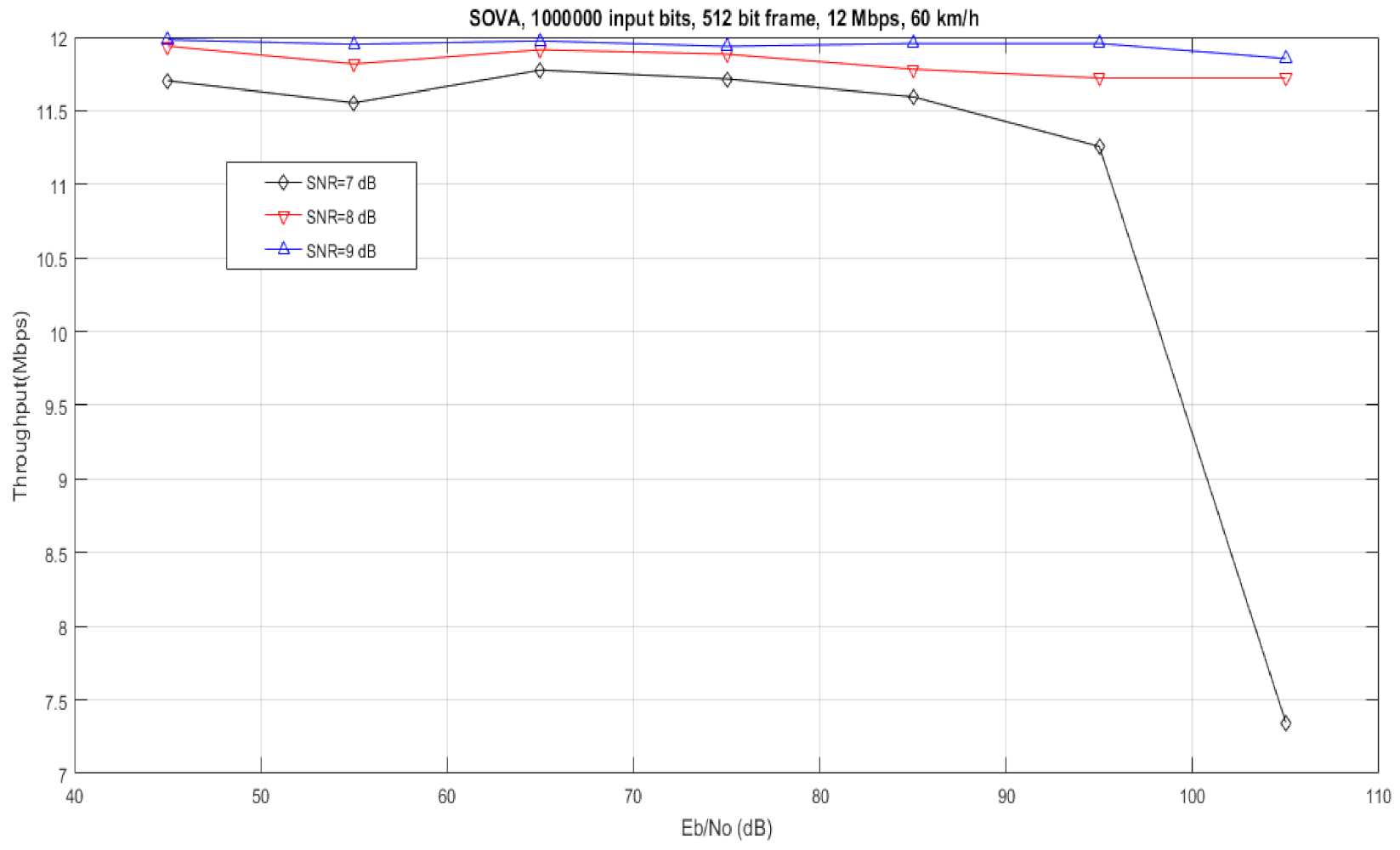
3.4. Throughput QoS Parameter
3.5. End-to-End Latency QoS Parameter
3.6. Communication Range QoS Parameter
3.7. Comparison of the Proposed Approach with Published Literature
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Torres-Figueroa, L.; Schepker, H.F.; Jiru, J. QoS Evaluation and Prediction for C-V2X Communication in Commercially-Deployed LTE and Mobile Edge Networks. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar]
- Ganesan, K.; Mallick, P.B.; Lohr, J.; Karampatsis, D.; Kunz, A. 5G V2X Architecture and Radio Aspects. In Proceedings of the 2019 IEEE Conference on Standards for Communications and Networking (CSCN), Granada, Spain, 28–30 October 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Liu, M.; Deng, H.; Li, Z.; Zhu, Y. Design aspects on physical layer structure for 5G V2X and related issues. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Ali, Z.; Lagen, S.; Giupponi, L.; Rouil, R. 3GPP NR V2X Mode 2: Overview, Models and System-Level Evaluation. IEEE Access 2021, 9, 89554–89579. [Google Scholar] [CrossRef]
- Ashraf, S.A.; Blasco, R.; Do, H.; Fodor, G.; Zhang, C.; Sun, W. Supporting Vehicle-to-Everything Services by 5G New Radio Release-16 Systems. IEEE Commun. Stand. Mag. 2020, 4, 26–32. [Google Scholar] [CrossRef]
- Garcia, M.H.C.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Sahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- Gyawali, S.; Xu, S.; Qian, Y.; Hu, R.Q. Challenges and Solutions for Cellular Based V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 222–255. [Google Scholar] [CrossRef]
- Petrov, V.; Fodor, G.; Andreev, S.; Do, H.; Sahlin, H. V2X Connectivity: From LTE to Joint Millimeter Wave Vehicular Communications and Radar Sensing. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1120–1124. [Google Scholar]
- Harounabadi, M.; Soleymani, D.M.; Bhadauria, S.; Leyh, M.; Roth-Mandutz, E. V2X in 3GPP Standardization: NR Sidelink in Release-16 and Beyond. IEEE Commun. Stand. Mag. 2021, 5, 12–21. [Google Scholar] [CrossRef]
- Saad, M.M.; Khan, M.T.R.; Shah, S.H.A.; Kim, D. Advancements in Vehicular Communication Technologies: C-V2X and NR-V2X Comparison. IEEE Commun. Mag. 2021, 59, 107–113. [Google Scholar] [CrossRef]
- Katsaros, K.; Dianati, M. Evolution of Vehicular Communications within the Context of 5G Systems. In Enabling 5G Communication Systems to Support Vertical Industries; Wiley: Hoboken, NJ, USA, 2019; pp. 103–126. [Google Scholar]
- Osman, R.A.; Abdelsalam, A.K. A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication. Appl. Sci. 2021, 11, 9089. [Google Scholar] [CrossRef]
- Velez, G.; Martín, Á.; Pastor, G.; Mutafungwa, E. 5G Beyond 3GPP Release 15 for Connected Automated Mobility in Cross-Border Contexts. Sensors 2020, 20, 6622. [Google Scholar] [CrossRef] [PubMed]
- Parkvall, S.; Dahlman, E.; Furuskar, A.; Frenne, M. NR: The New 5G Radio Access Technology. IEEE Commun. Stand. Mag. 2017, 1, 24–30. [Google Scholar] [CrossRef]
- Bhadauria, S.; Shabbir, Z.; Roth-Mandutz, E.; Fischer, G. QoS based Deep Reinforcement Learning for V2X Resource Allocation. In Proceedings of the 2020 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Odessa, Ukraine, 26–29 May 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Trivisonno, R.; Wei, Q.; Marquezan, C.C. QoS Enhancements for V2X Services in 5G Networks. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Park, Y.; Kim, T.; Hong, D. Resource Size Control for Reliability Improvement in Cellular-Based V2V Communication. IEEE Trans. Veh. Technol. 2018, 68, 379–392. [Google Scholar] [CrossRef]
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and Perspectives of Vehicular Wi-Fi versus Sidelink Cellular-V2X in the 5G Era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef] [Green Version]
- Bazzi, A.; Berthet, A.O.; Campolo, C.; Masini, B.M.; Molinaro, A.; Zanella, A. On the Design of Sidelink for Cellular V2X: A Literature Review and Outlook for Future. IEEE Access 2021, 9, 97953–97980. [Google Scholar] [CrossRef]
- Kosmanos, D.; Chaikalis, C.; Savvas, I.K.; Anagnostou, K.E.; Bargiotas, D. Investigating 5G V2X QoS using turbo codes. In Proceedings of the 2021 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 7–8 October 2021; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2021; pp. 68–73. [Google Scholar]
- Chaikalis, C.; Kosmanos, D.; Samaras, N.S. Utilizing turbo codes for secure 5G V2X. In Proceedings of the 2020 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 1–2 October 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; Volume 1, pp. 30–34. [Google Scholar]
- Chaikalis, C.; Kosmanos, D.; Anagnostou, K.E.; Savvas, I.; Bargiotas, D. Enhancing the 5G V2X Reliability Using Turbo Coding for Short Frames; International Journal of Grid and Utility Computing, Inderscience Publishers: Geneva, Switzerland, 2021. [Google Scholar]
- Del Puerto-Flores, J.; Yllescas, L.C.; Parra-Michel, R.; Pena-Campos, F.; Cortez, J. Performance Evaluation of Turbo Decoding in DFTS-OFDM Systems Over V2V Channel. In Proceedings of the 2018 IEEE 10th Latin-American Conference on Communications (LATINCOM), Guadalajara, Mexico, 14–16 November 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Woodard, J.; Hanzo, L. Comparative study of turbo decoding techniques: An overview. IEEE Trans. Veh. Technol. 2000, 49, 2208–2233. [Google Scholar] [CrossRef] [Green Version]
- 3GPP TR 22.186 V16.2.0: Service Requirements for Enhanced V2X Scenarios (Release 16), 3GPP Std. Available online: https://www.etsi.org/deliver/etsi_ts/122100_122199/122186/16.02.00_60/ts_122186v160200p.pdf (accessed on 1 November 2021).
- Ahmadi, S. Chapter 7—Vehicle-to-Everything (V2X) Communications; 5G, NR; Ahmadi, A., Ed.; Academic Press Publishers: Cambridge, MA, USA, 2019; pp. 789–843. ISBN 9780081022672. [Google Scholar]
- Kanavos, A.; Fragkos, D.; Kaloxylos, A. V2X Communication over Cellular Networks: Capabilities and Challenges. Telecom 2021, 2, 1. [Google Scholar] [CrossRef]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Connected Roads of the Future: Use Cases, Requirements, and Design Considerations for Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2018, 13, 110–123. [Google Scholar] [CrossRef]
- Kosmanos, D.; Argyriou, A.; Maglaras, L. Estimating the Relative Speed of RF Jammers in VANETs. Secur. Commun. Netw. 2019, 2019, 1–18. [Google Scholar] [CrossRef]
- Boban, M.; Barros, J.; Tonguz, O.K. Geometry-Based Vehicle-to-Vehicle Channel Modeling for Large-Scale Simulation. IEEE Trans. Veh. Technol. 2014, 63, 4146–4164. [Google Scholar] [CrossRef] [Green Version]
- Abbas, F.; Fan, P.; Khan, Z. A novel reliable low-latency multipath routing scheme for vehicular ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 296. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Sun, S.; Li, Y.; Tan, Z.; Huang, W.; Yao, X. A Power Control Algorithm Based on Outage Probability Awareness in Vehicular Ad Hoc Networks. Adv. Multimed. 2018, 2018, 1–8. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario Number | Description | Reliability (%) | End-to-End Latency | Data Rate per Vehicle (kbps) | Communication Range |
|---|---|---|---|---|---|
| 1 | Cooperative awareness | 90–95 | 100 msto 1 s | 5–96 | Short to medium |
| 2 | Cooperative sensing | >95 | 3 ms to 1 s | 5–25,000 | Short |
| 3 | Cooperative maneuver | >99 | <3 to 100 ms | 10–5000 | Short to medium |
| 4 | Vulnerable road user | 95 | 100 ms to 1 s | 5–10 | Short |
| 5 | Traffic efficiency | <90 | >1 s | 10–2000 | Long |
| 6 | Tele-operated driving | >99 | 5–20 ms | >25,000 | Long |
| Scenario Number | Data Rate per Vehicle Rb (Mbps) | Vehicle Speed (km/h) | Doppler Frequency fd (Hz) | |||
|---|---|---|---|---|---|---|
| 1 | 256 | 6 | 60 | 327.77 | 45 | |
| 2 | 256 | 12 | 60 | 327.77 | 45 | |
| 3 | 256 | 6 | 100 | 546.29 | 45 | |
| 4 | 256 | 12 | 100 | 546.29 | 45 | |
| 5 | 512 | 6 | 60 | 327.77 | 45 | |
| 6 | 512 | 12 | 60 | 327.77 | 45 | |
| 7 | 512 | 6 | 100 | 546.29 | 45 | |
| 8 | 512 | 12 | 100 | 546.29 | 45 | |
| 9 | 512 | 18 | 60 | 327.77 | 45 |
| Table 2 Scenario | 0 dB | 1 dB | 2 dB | 3 dB | 4 dB | 5 dB | 6 dB | 7 dB | 8 dB | 9 dB | 10 dB |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 5 | 5 | 5 | 5 | 5 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 2 | 5 | 5 | 5 | 5 | 5 | 5 | 1 (only log-MAP and SOVA), 5 (only SOVA) | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 3 | 5 | 5 | 5 | 5 | 5 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 4 | 5 | 5 | 5 | 5 | 5 | 5 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 5 | 5 | 5 | 5 | 5 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 6 | 5 | 5 | 5 | 5 | 5 | 2 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 7 | 5 | 5 | 5 | 5 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| 8 | 5 | 5 | 5 | 5 | 5 | 1 (only log-MAP and SOVA), 5 (only SOVA) | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 | 2, 3, 6 |
| Table 2 Scenario | td1 (SOVA) | td2 (log-MAP) | td3 (max-log-MAP) | Table 1 Scenario |
|---|---|---|---|---|
| 1 | 95.76 | 100.368 | 106.128 | 3 (SOVA), 1 and 4 (log-MAP, max-log-MAP), 2 (all algorithms) |
| 2 | 92.88 | 95.184 | 98.064 | 2, 3 (all algorithms) |
| 3 | 95.76 | 100.368 | 106.128 | 3 (SOVA), 1 and 4 (log-MAP, max-log-MAP), 2 (all algorithms) |
| 4 | 92.88 | 95.184 | 98.064 | 2, 3 (all algorithms) |
| 5 | 101.52 | 110.736 | 122.256 | 1, 2, 4 (all algorithms) |
| 6 | 95.76 | 100.368 | 106.128 | 3 (SOVA), 1 and 4 (log-MAP, max-log-MAP), 2 (all algorithms) |
| 7 | 101.52 | 110.736 | 122.256 | 1, 2, 4 (all algorithms) |
| 8 | 95.76 | 100.368 | 106.128 | 3 (SOVA), 1 and 4 (log-MAP, max-log-MAP), 2 (all algorithms) |
| Vehicle Density | td1 (SOVA) | td2 (log-MAP) | td3 (max-log-MAP) | Table 1 Scenario |
|---|---|---|---|---|
| VD = 55 | 117.04 | 122.672 | 129.712 | 1, 2, 4 (all algorithms) |
| VD = 65 | 138.32 | 144.976 | 153.296 | 1, 2, 4 (all algorithms) |
| VD = 75 | 159.6 | 167.28 | 176.88 | 1, 2, 4 (all algorithms) |
| VD = 85 | 180.88 | 189.584 | 200.464 | 1, 2, 4 (all algorithms) |
| VD = 95 | 202.16 | 211.888 | 224.048 | 1, 2, 4 (all algorithms) |
| VD = 105 | 223.44 | 234.192 | 247.632 | 1, 2, 4 (all algorithms) |
| Related References | 3GPP 5G V2X Release | QoS Optimization/Parameters Taken into Account | Channel Coding Consideration |
|---|---|---|---|
| [15] | 16 | Vehicle speed, density | |
| [16] | 16 | Vehicle density | |
| [20] | 16 | ✓ | |
| [21] | 16 | Message size | ✓ |
| [22] | 16 | Message size, vehicle speed, data rate | ✓ |
| [23] | ✓ | ||
| Proposed approach | 16 | Message size, vehicle speed, data rate, vehicle density | ✓ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kosmanos, D.; Chaikalis, C.; Savvas, I.K. 3GPP 5G V2X Scenarios: Performance of QoS Parameters Using Turbo Codes. Telecom 2022, 3, 174-194. https://doi.org/10.3390/telecom3010012
Kosmanos D, Chaikalis C, Savvas IK. 3GPP 5G V2X Scenarios: Performance of QoS Parameters Using Turbo Codes. Telecom. 2022; 3(1):174-194. https://doi.org/10.3390/telecom3010012
Chicago/Turabian StyleKosmanos, Dimitrios, Costas Chaikalis, and Ilias K. Savvas. 2022. "3GPP 5G V2X Scenarios: Performance of QoS Parameters Using Turbo Codes" Telecom 3, no. 1: 174-194. https://doi.org/10.3390/telecom3010012
APA StyleKosmanos, D., Chaikalis, C., & Savvas, I. K. (2022). 3GPP 5G V2X Scenarios: Performance of QoS Parameters Using Turbo Codes. Telecom, 3(1), 174-194. https://doi.org/10.3390/telecom3010012