Ensuring Uninterrupted MTC Service Availability during Emergencies Using LTE/5G Public Mobile Land Networks



Abstract
1. Introduction
2. Communication Requirements for Autarkic Microgrid Blackout Recovery
3. Using LTE/5G-based Public Mobile Land Networks for Autarkic Microgrid Blackout Recovery
3.1. CAT-M1 for LTE/5G Public Network Support of DG Management Communication
3.2. eNodeB Support for Microgrid Blackout Recovery
3.3. Access Barring Mechanisms
3.4. Preferential, Differentiated MTC using CAT-M1 in LTE and 5G
3.5. Preferential, Differentiated MTC Using PLMN-Based Access Barring in LTE
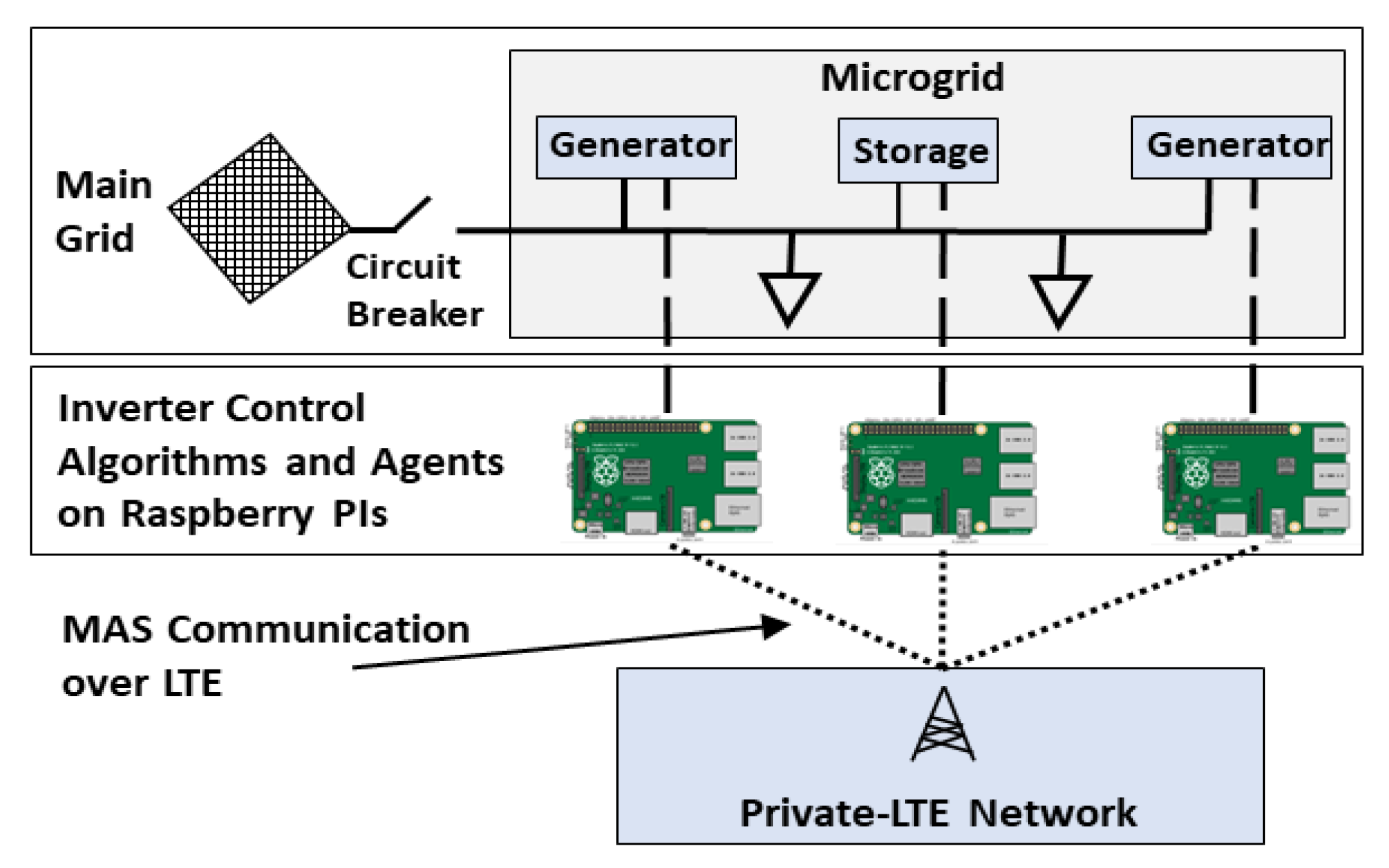
4. Laboratory Test of PLMN-Based Access Barring for Communications Reliability during Blackout Recovery
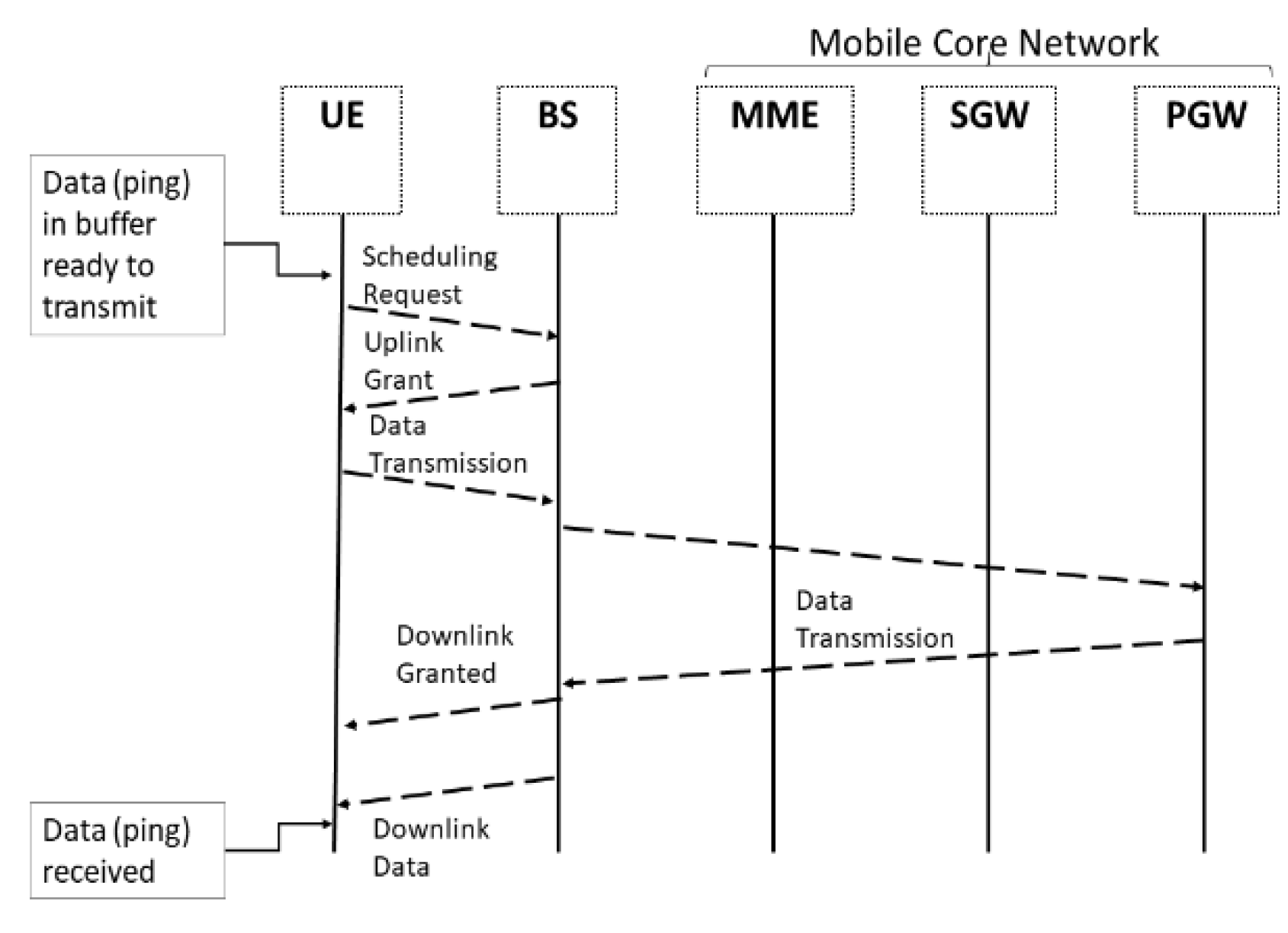
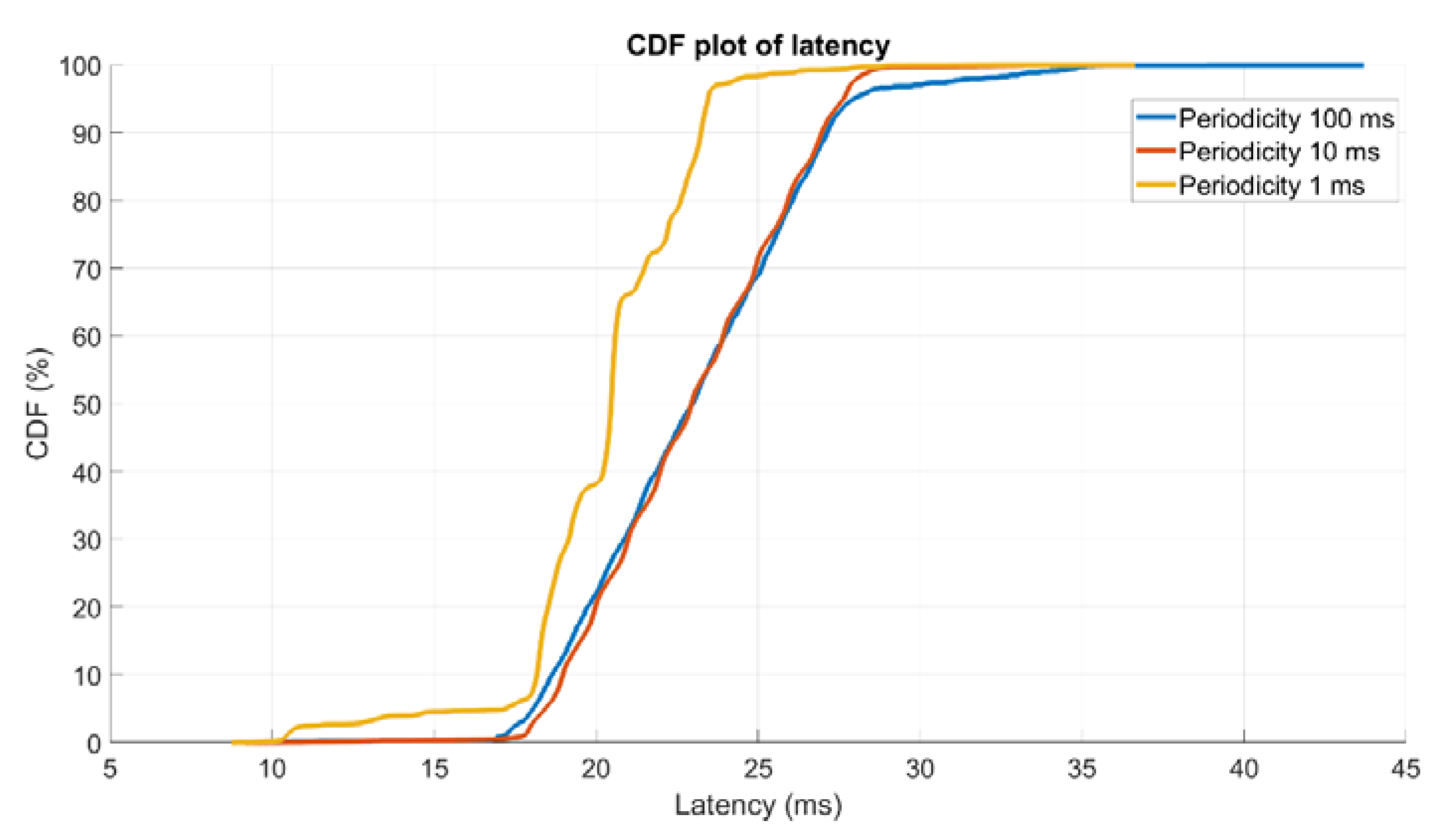
4.1. Measurement of Latency
4.2. Evaluation
5. CTMC Estimation of Improvement in Blackout Recovery Time with Autarkic Microgrids
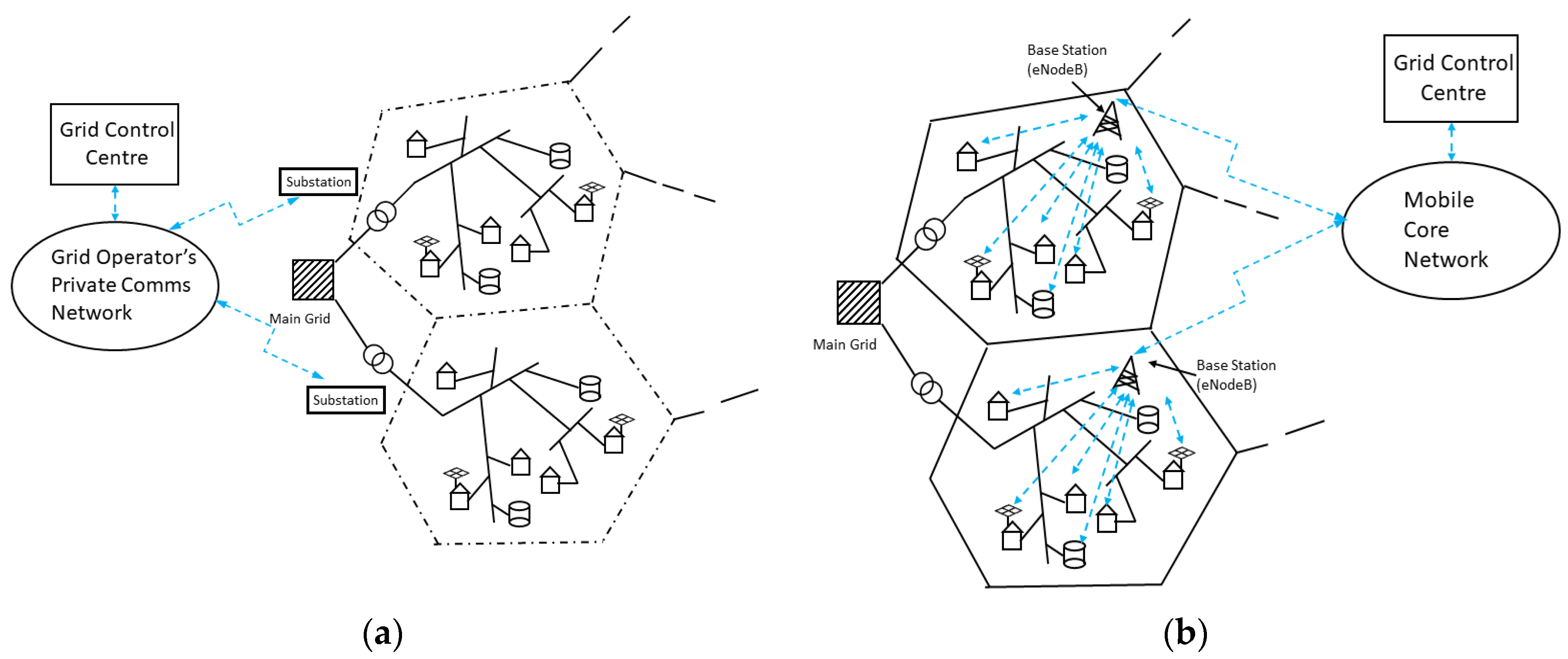
- the DERs in the DG act independently without external control and without external communications;
- in case of blackout, they disconnect from the power line;
- the substations receive control signals from, and send measurements to, a DG grid control centre;
- the areas enclosed by dotted lines correspond to the grids served by the substations;
- the substations and the control centre have a private communications network available, and this network continues to operate during blackouts.
- Test Case 1, Scenario 1: Conventional hierarchical top-down blackout recovery: no use is made of DERs present in the MV and LV levels to assist in the blackout recovery. The simplifying assumption is made that the communications network continues to function in the blackout. The blackout recovery steps are: to re-energise the grid control centres (SCADA) and bring up generation units; to re-energise the transmission grid; and to re-energise the DG and loads.
- Test Case 1, Scenario 2: blackout recovery using autarkic microgrids: autarkic blackout recovery is performed in the microgrid using MTC-based MAS communications but without the IOPS function, so that, if the eNodeB loses service from the mobile core network, the communication in the MAS fails. It is assumed that the eNodeBs are equipped with emergency power supplies, so that they continue to provide service in the blackout. Here, the microgrids autarkically perform black starts. The steps in the blackout recovery procedure in the microgrid are, firstly, to identify which nodes in the MAS are working; secondly, to identify the current microgrid topology and DER capacity; and, thirdly, to re-energise the microgrid and the loads. The CTMC states and conservative estimates of the state transition values are given in Table 3 and Table 4.
- Test Case 1, Scenario 3: Improved blackout recovery using autarkic microgrids and continuous preparation for blackout: this is a further development of Scenario 2, but with the MAS continuously preparing during normal operation for blackout. It continuously monitors which agents are reachable, and deduces the current microgrid topology and what the DER production is. Based on this situational awareness, it knows whether it is able to perform black start in case of all possible combinations of nodes failing. Table 5 shows the neighbour identification time (T_MG_NBR_IDENTIFICATION), which includes the identification of the working MAS nodes and the actual grid topology. Furthermore, the value assumed for the time to coordinate the different MAS nodes to restore the microgrid (T_MG_CON_RES) is also shown.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Z.; Chen, G.; Liu, L.; Hill, D.J. Cascading risk assessment in power-communication interdependent networks. Physics A 2020, 540, 120496. [Google Scholar] [CrossRef]
- Gungor, V.; Sahin, D.; Kocak, T.; Ergut, S.; Buccella, C.; Cecati, C.; Hancke, G.P. Smart Grid Technologies: Communication Technologies and Standards. IEEE Trans. Ind. Inform. 2011, 7, 529–539. [Google Scholar] [CrossRef]
- Ghorbanian, M.; Dolatabadi, S.; Masjedi, M.; Siano, P. Communication in Smart Grids: A Comprehensive Review on the Existing and Future Communication and Information Infrastructures. IEEE Syst. J. 2019, 13, 4001–4014. [Google Scholar] [CrossRef]
- Gungor, V.; Sahin, D.; Kocak, T.; Ergut, S.; Buccella, C.; Cecati, C.; Hancke, G.P. A Survey on Smart Grid Potential Applications and Communication Requirements. IEEE Trans. Ind. Inform. 2013, 9, 28–42. [Google Scholar] [CrossRef]
- Kim, M. A survey on guaranteeing availability in smart grid communications. In Proceedings of the 2012 14th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 19–22 February 2012; pp. 314–317. [Google Scholar]
- McKeever, P.; De Din, E.; Sadu, A.; Monti, A. MAS for automated black start of multi-microgrids. In Proceedings of the 2017 IEEE International Conference on Smart Grid Communications (SmartGridComm), Dresden, Germany, 23–27 October 2017; pp. 32–37. [Google Scholar]
- Nazari, M.; Wang, L.; Grijalva, S.; Egerstedt, M. Communication-Failure-Resilient Distributed Frequency Control in Smart Grids: Part I: Architecture and Distributed Algorithms. IEEE Trans. Power Syst. 2020, 35, 1317–1326. [Google Scholar] [CrossRef]
- Palaniappan, R.; Funke, A.; Hilbrich, D.; Bauernschmitt, B.; Rehtanz, C. A robust and resilient voltage control strategy for smart grids using distributed measurements. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2411–2415. [Google Scholar]
- Chen, L.; Dong, X.; Kuang, X.; Chen, B.; Hong, D. Towards Ubiquitous Power Distribution Communication: Multi-service Access and QoS Guarantees for IoT Applications in Smart Grid. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 894–898. [Google Scholar]
- Popovski, P. Ultra-reliable communication in 5G wireless systems. In Proceedings of the 1st International Conference on 5G for Ubiquitous Connectivity, Akaslompolo, Finland, 26–28 November 2014; pp. 146–151. [Google Scholar]
- Kalor, A.; Popovski, P. Ultra-Reliable Communication for Services with Heterogeneous Latency Requirements. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Ali, S. Next Generation and Advanced Network Reliability Analysis Using Markov Models and Software Reliability Engineering; Springer Nature Switzerland AG: Basel, Switzerland, 2019. [Google Scholar]
- Gazis, V. A Survey of Standards for Machine-to-Machine and the Internet of Things. IEEE Commun. Surv. Tutor. 2017, 19, 482–511. [Google Scholar] [CrossRef]
- 3GPP. Technical Specifications and Technical Reports for a UTRAN-Based 3GPP system (Release 8); 3rd Generation Partnership Project (3GPP): Sophia Antipolis, France, 2012. [Google Scholar]
- 3GPP. Technical Specification Group Services and System Aspects (Rel 13); 3rd Generation Partnership Project (3GPP): Sophia Antipolis, France, 2016. [Google Scholar]
- Aoyagi, K.; Hapsari, W.; Takeda, S.; Tanaka, I. Access Class Control Technology in LTE/LTE Advanced Systems. NTT DOCOMO Tech. J. 2015, 17, 65–76. [Google Scholar]
- Oueis, J.; Conan, V.; Lavaux, D.; Stanica, R.; Valois, F. Overview of LTE Isolated E-UTRAN Operation for Public Safety. IEEE Commun. Stand. Mag. 2017, 1, 98–105. [Google Scholar] [CrossRef]
- Sadu, A.; Ostendorf, L.; Lipari, G.; Ponci, F.; Monti, A. Resilient design of distribution grid automation system with CALVIN. In Proceedings of the 2018 IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018. [Google Scholar]
- Sadu, A.; Roy, G.; Ponci, F.; Monti, A. Methodology for Reliability Analysis of Cyber-Physical MTdc Grids. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [Google Scholar] [CrossRef]
- UCTE. Final Report of the Investigation Committee on the 28 September 2003 Blackout in Italy; Union for the Co-ordination of Transmission of Electricity (UCTE): Brussels, Belgium, 2004. [Google Scholar]
- DeBlasio, A.J.; Regan, T.J.; Zirker, M.E.; Fichter, K.S.; Lovejoy, K. Effects of Catastrophic Events on Transportation Systems Management and Operations—August 2003 Blackout Great Lakes Region; U.S. Department of Transportation: Cambridge, MA, USA, 2004. [Google Scholar]
- Anghel, M.; Werley, K.; Motter, A. Stochastic Model for Power Grid Dynamics. In Proceedings of the 2007 40th Annual Hawaii International Conference on System Sciences (HICSS’07), Waikoloa, HI, USA, 3–6 January 2007. [Google Scholar]
- Dharmaraja, S.; Jindal, V.; Varshney, U. Reliability and Survivability Analysis for UMTS Networks: An Analytical Approach. IEEE Trans. Netw. Serv. Manag. 2008, 5, 132–142. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | State Meaning |
|---|---|
| S1 | Blackout |
| S2 | SCADA_Up, Generator_Dn,Network_Dn, Load_Dn |
| S3 | SCADA_Dn, Generator_Up,Network_Dn, Load_Dn |
| S4 | SCADA_Up, Generator_Up,Network_Dn, Load_Dn |
| S5 | SCADA_Up, Generator_Up,Network_Up, Load_Dn |
| S6 | Grid Restored |
| Transition | Transition Purpose: Time to | Value (hours) |
|---|---|---|
| T_SCADA | bring up SCADA | 1 |
| T_GEN | bring up the generators | 10 |
| T_NET | energise the transmission grid | 4 |
| T_LOAD_RES | restore the load | 6 |
| State | State Meaning |
|---|---|
| S1_MG | Blackout |
| S2_MG | MG controller up, real time MG capability and topology identified |
| S3_MG | Microgrids restored |
| S1_MG | Blackout |
| Transition | Transition Purpose: Time to… | Value (hours) |
|---|---|---|
| T_MG_NBR_IDENTIFICATION | bring up SCADA | 0.75 |
| T_MG_CON_RES | bring up the generators | 2 |
| Transition | Transition Purpose: Time to | Value (hours) |
|---|---|---|
| T_MG_NBR_IDENTIFICATION | bring up SCADA | 0.02 |
| T_MG_CON_RES | bring up the generators | 0.08 |
| Transition | Transition Purpose: Time to | Value (hours) |
|---|---|---|
| T_eNodeB | Mean time for eNodeB failure | 0.002 |
| T_Core_Net | Time to bring up the DERs generation | 0.003 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
McKeever, P.; Sadu, A.; Rohilla, S.; Mehdi, Z.; Monti, A. Ensuring Uninterrupted MTC Service Availability during Emergencies Using LTE/5G Public Mobile Land Networks. Telecom 2020, 1, 181-195. https://doi.org/10.3390/telecom1030013
McKeever P, Sadu A, Rohilla S, Mehdi Z, Monti A. Ensuring Uninterrupted MTC Service Availability during Emergencies Using LTE/5G Public Mobile Land Networks. Telecom. 2020; 1(3):181-195. https://doi.org/10.3390/telecom1030013
Chicago/Turabian StyleMcKeever, Padraic, Abhinav Sadu, Shubham Rohilla, Zain Mehdi, and Antonello Monti. 2020. "Ensuring Uninterrupted MTC Service Availability during Emergencies Using LTE/5G Public Mobile Land Networks" Telecom 1, no. 3: 181-195. https://doi.org/10.3390/telecom1030013
APA StyleMcKeever, P., Sadu, A., Rohilla, S., Mehdi, Z., & Monti, A. (2020). Ensuring Uninterrupted MTC Service Availability during Emergencies Using LTE/5G Public Mobile Land Networks. Telecom, 1(3), 181-195. https://doi.org/10.3390/telecom1030013