
25,000 fps Computational Ghost Imaging with Ultrafast Structured Illumination


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
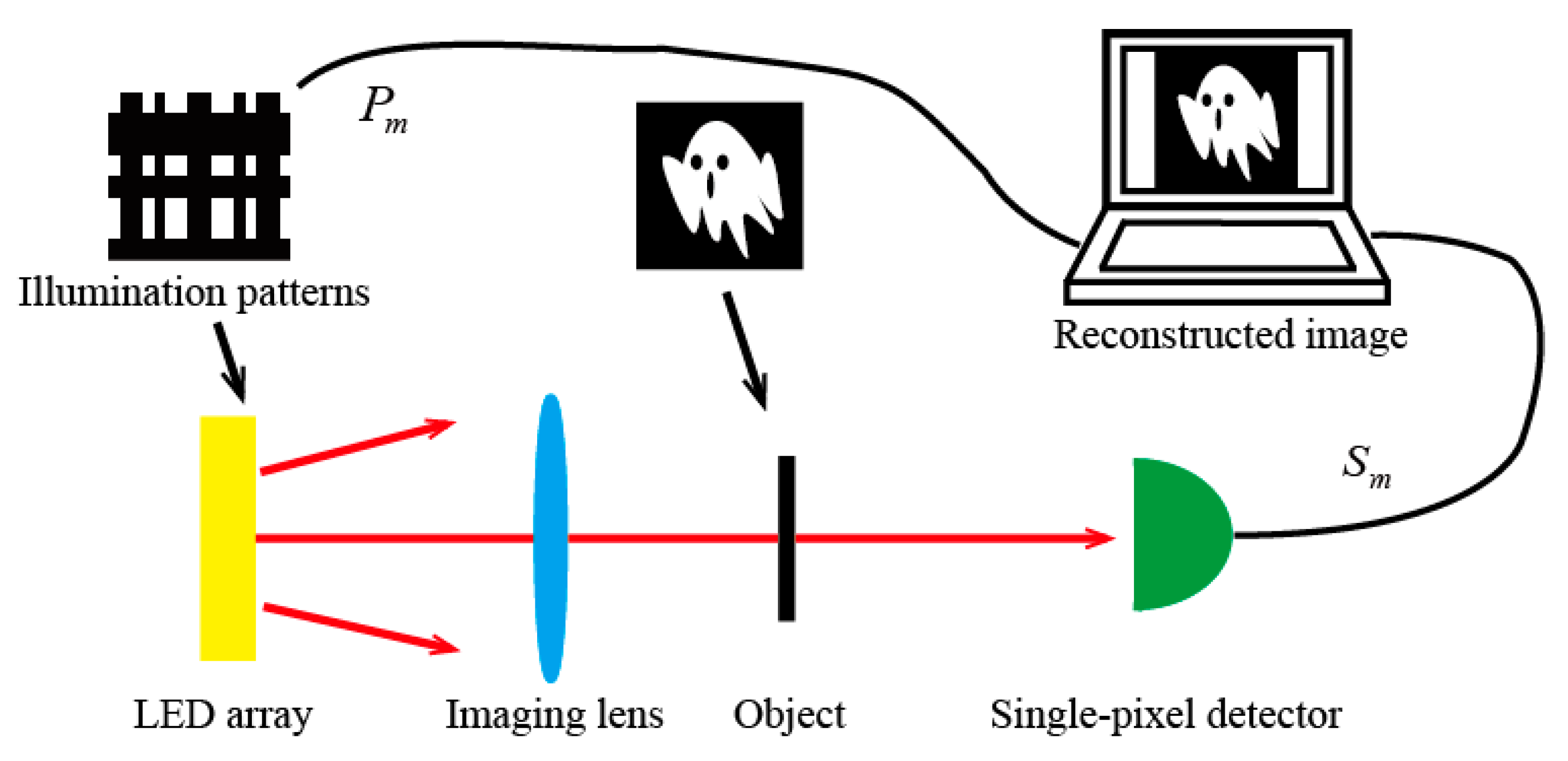
2.1. LED-Based Computational Ghost Imaging
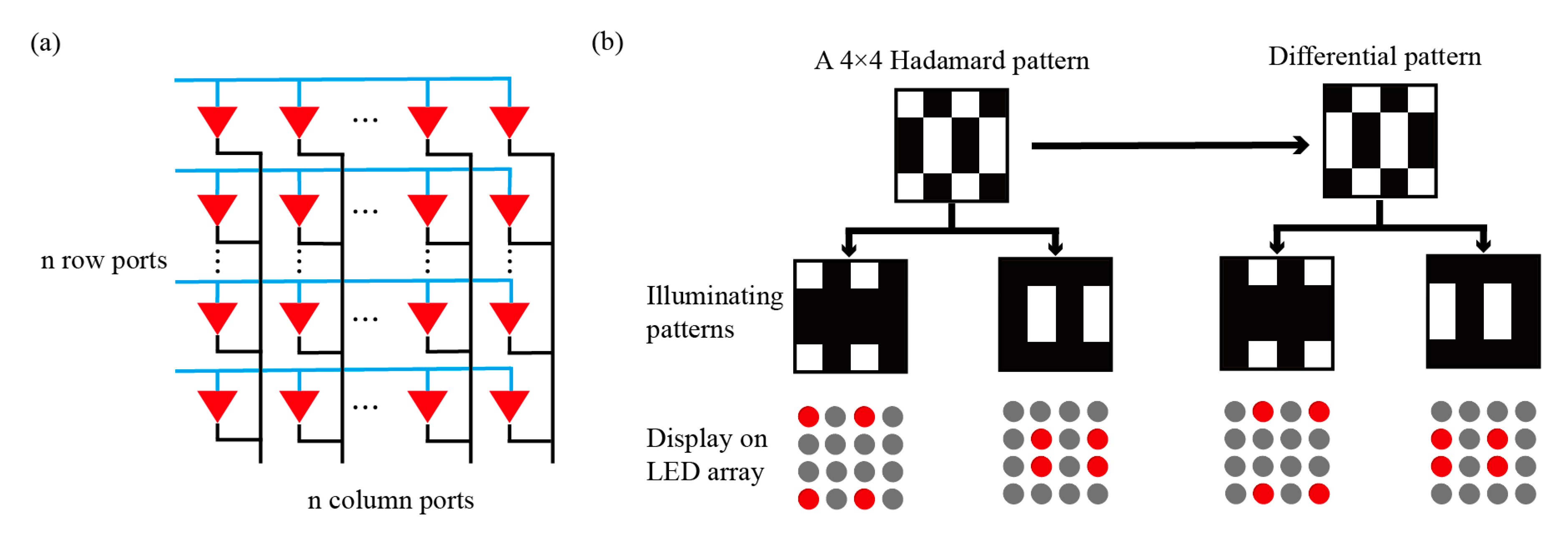
2.2. Monochromatic LED Illumination Module and Its Driver
3. Results and Discussion
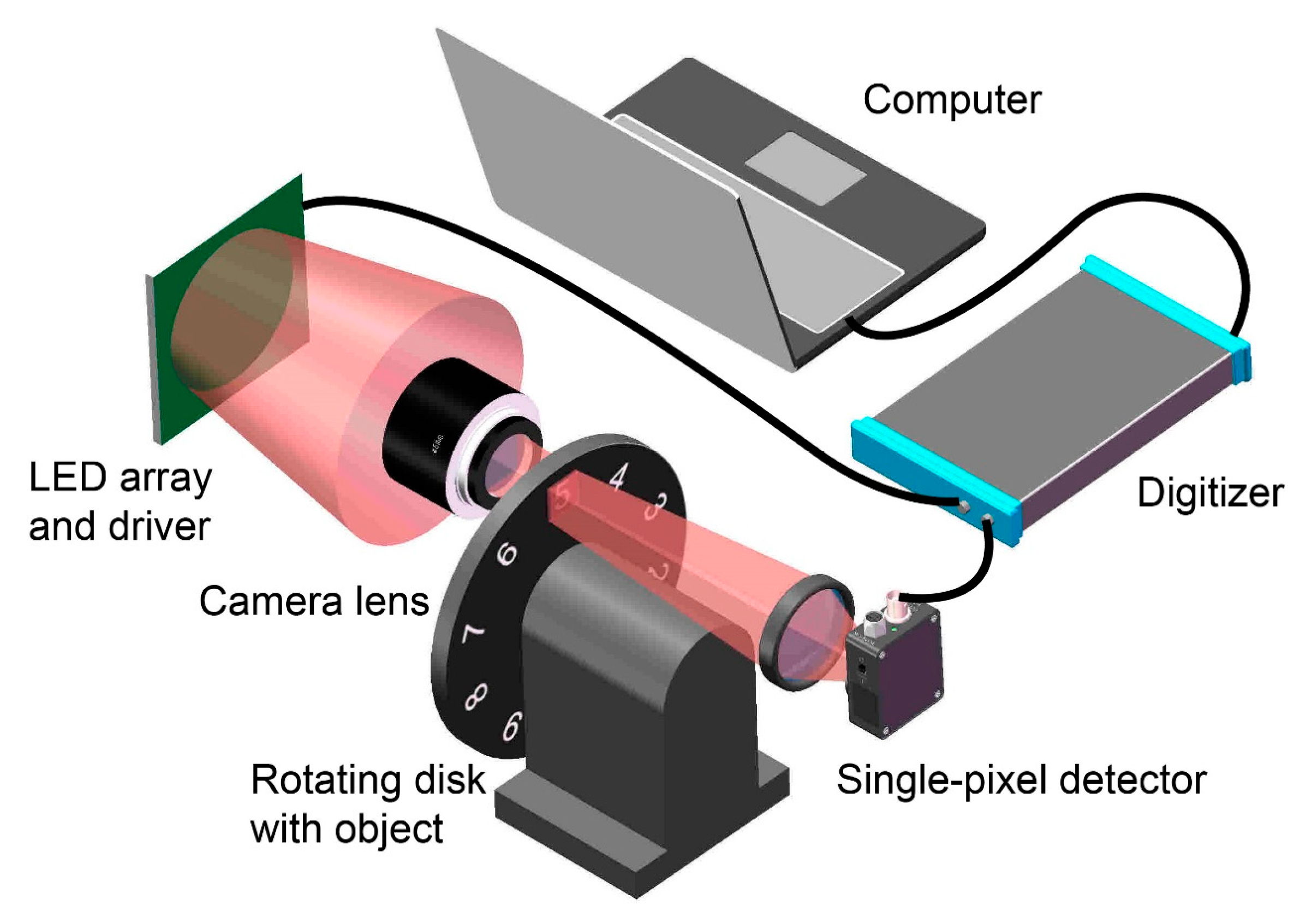
3.1. LED-Based Computational Ghost Imaging System
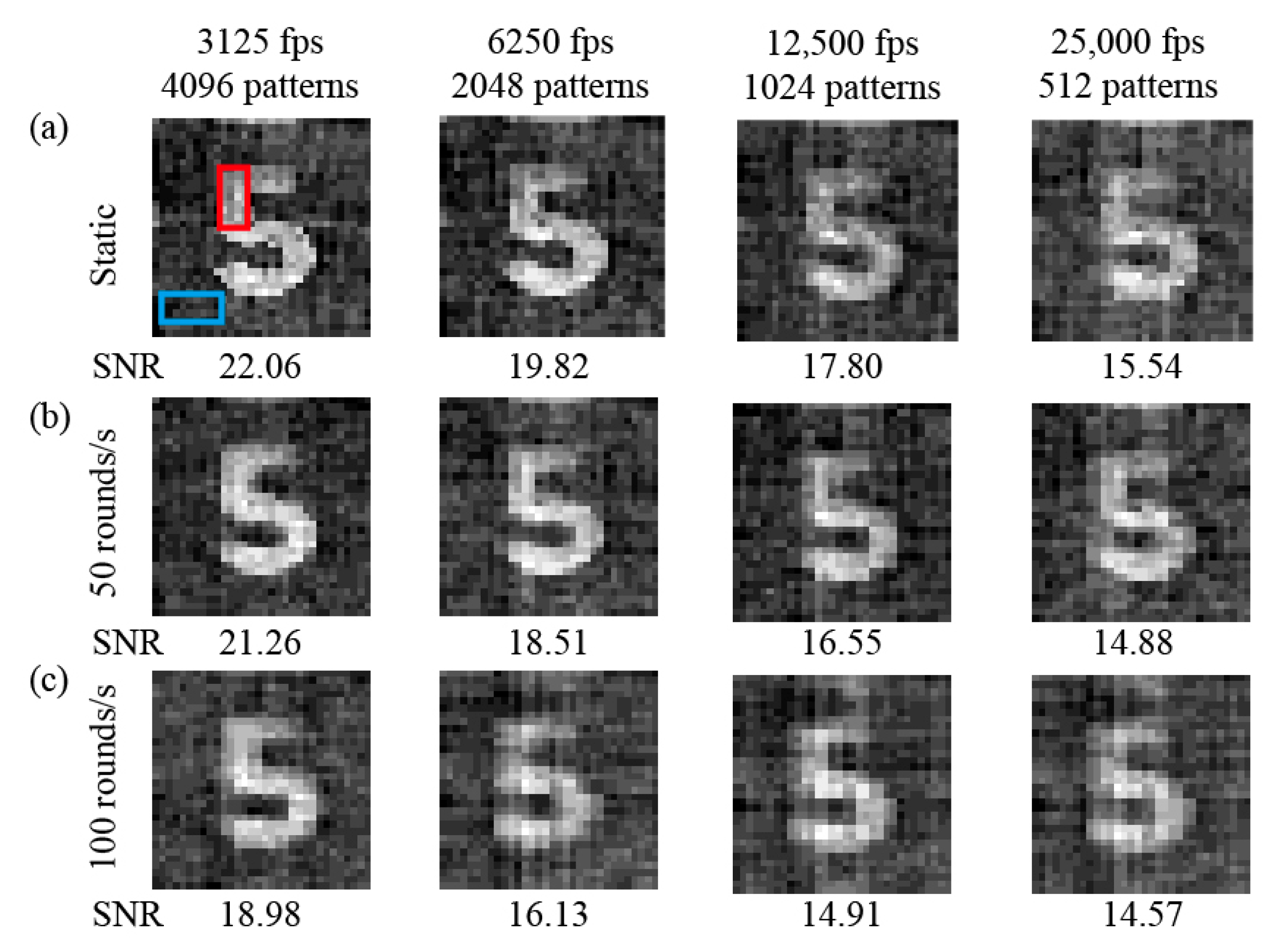
3.2. Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bromberg, Y.; Katz, O.; Silberberg, Y. Ghost imaging with a single detector. Phys. Rev. A 2009, 79, 053840. [Google Scholar] [CrossRef] [Green Version]
- Shapiro, J.H. Computational ghost imaging. Phys. Rev. 2008, 78, 061802. [Google Scholar] [CrossRef]
- Zhao, C.; Gong, W.; Chen, M.; Li, E.; Han, A.S. Ghost imaging lidar via sparsity constraints. Appl. Phys. Lett. 2012, 101, 141123. [Google Scholar] [CrossRef] [Green Version]
- Gong, W.; Zhao, C.; Yu, H.; Chen, M.; Xu, W.; Han, S. Three-dimensional ghost imaging lidar via sparsity constraint. Sci. Rep. 2016, 6, 26133. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Li, E.; Gong, W.; Han, S. Structured image reconstruction for three-dimensional ghost imaging lidar. Opt. Express 2015, 23, 14541–14551. [Google Scholar] [CrossRef]
- Wang, S.Y.; Li, L.J.; Chen, W.; Sun, M.J. Improving seeking precision by utilizing ghost imaging in a semi-active quadrant detection seeker. Chin. J. Aeronaut. 2021, 34, 171–176. [Google Scholar] [CrossRef]
- Sun, M.J.; Zhang, J.M. Single-pixel imaging and its application in three-dimensional reconstruction: A brief review. Sensors 2019, 19, 732. [Google Scholar] [CrossRef] [Green Version]
- Sun, B.; Edgar, M.P.; Bowman, R.; Vittert, L.E.; Welsh, S.; Bowman, A.; Padgett, M.J. 3D computational imaging with single-pixel detectors. Science 2013, 340, 844–847. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.J.; Edgar, M.P.; Gibson, G.M.; Sun, B.; Radwell, N.; Lamb, R.; Padgett, M.J. Single-pixel three-dimensional imaging with time-based depth resolution. Nat. Commun. 2016, 7, 12010. [Google Scholar] [CrossRef]
- Hardy, N.D.; Shapiro, J.H. Computational ghost imaging versus imaging laser radar for three-dimensional imaging. Phys. Rev. A 2013, 87, 023820. [Google Scholar] [CrossRef]
- Chen, W.; Sun, M.J.; Deng, W.J.; Hu, H.X.; Li, L.J.; Zhang, X.J. Hyperspectral imaging via a multiplexing digital micromirror device. Opt. Lasers Eng. 2022, 151, 106889. [Google Scholar] [CrossRef]
- Radwell, N.; Mitchell, K.J.; Gibson, G.M.; Edgar, M.P.; Bowman, R.; Padgett, M.J. Single-pixel infrared and visible microscope. Optica 2014, 1, 285–289. [Google Scholar] [CrossRef]
- Bian, L.; Suo, J.; Situ, G.; Li, Z.; Fan, J.; Chen, F. Multispectral imaging using a single bucket detector. Sci. Rep. 2016, 6, 24752. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, W.J.; Li, X.Y.; Peng, X.L.; Sun, B.Q. Imaging high-speed moving targets with a single-pixel detector. Opt. Express 2020, 28, 7889–7897. [Google Scholar] [CrossRef]
- Phillips, D.B.; Sun, M.J.; Taylor, J.M.; Edgar, M.P.; Barnett, S.M.; Gibson, G.M.; Padgett, M.J. Adaptive foveated single-pixel imaging with dynamic super-sampling. Sci. Adv. 2017, 3, e1601782. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, M.; Li, E.; Han, S. Application of multi-correlation-scale measurement matrices in ghost imaging via sparsity constraints. Appl. Opt. 2014, 53, 2924–2928. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Ma, X.; Zhong, J. Single-pixel imaging by means of fourier spectrum acquisition. Nat. Commun. 2014, 6, 6225. [Google Scholar] [CrossRef] [Green Version]
- Li, L.J.; Chen, W.; Zhao, X.Y.; Sun, M.J. Fast Optical Phased Array Calibration Technique for Random Phase Modulation LiDAR. IEEE Photonics J. 2018, 1, 6900410. [Google Scholar] [CrossRef]
- Yusuke, K.; Kento, K.; Rui, T.; Yasuyuki, O.; Yoshiaki, N.; Takuo, T. Ghost imaging using a large-scale silicon photonic phased array chip. Opt. Express 2019, 27, 3817–3823. [Google Scholar]
- Qian, H.; Zhao, S.; Cai, S.Z.; Zhou, T. Digitally controlled micro-led array for linear visible light communication systems. IEEE Photonics J. 2017, 7, 1–8. [Google Scholar] [CrossRef]
- Lan, H.Y.; Tseng, I.C.; Lin, Y.H.; Lin, G.R.; Wu, C.H. High-speed integrated micro-leds array for visible light communication. Opt. Lett. 2020, 45, 2203–2206. [Google Scholar] [CrossRef] [PubMed]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F. Single-pixel imaging via compressive sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inform. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Katz, O.; Bromberg, Y.; Silberberg, Y. Compressive ghost imaging. Appl. Phys. Lett. 2009, 95, 131110. [Google Scholar] [CrossRef] [Green Version]
- Aβmann, M.; Bayer, M. Compressive adaptive computational ghost imaging. Sci. Rep. 2013, 3, 1545. [Google Scholar] [CrossRef]
- Sun, M.J.; Meng, L.T.; Edgar, M.P.; Padgett, M.J.; Radwell, N. A Russian Dolls ordering of the Hadamard basis for compressive single-pixel imaging. Sci. Rep. 2017, 7, 3464. [Google Scholar] [CrossRef] [Green Version]
- Pratt, W.K.; Kane, J.; Andrews, H.C. Hadamard transform image coding. Proc. IEEE 1969, 57, 58–68. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.H.; Chen, W.; Penulas, J.; Padgett, M.J.; Sun, M.J. 1000 fps computational ghost imaging using LED-based structured illumination. Opt. Express 2018, 26, 2427–2434. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Li, L.; Ma, Y.; Sun, M. 25,000 fps Computational Ghost Imaging with Ultrafast Structured Illumination. Electron. Mater. 2022, 3, 93-100. https://doi.org/10.3390/electronicmat3010009
Huang H, Li L, Ma Y, Sun M. 25,000 fps Computational Ghost Imaging with Ultrafast Structured Illumination. Electronic Materials. 2022; 3(1):93-100. https://doi.org/10.3390/electronicmat3010009
Chicago/Turabian StyleHuang, Hongxu, Lijing Li, Yuxuan Ma, and Mingjie Sun. 2022. "25,000 fps Computational Ghost Imaging with Ultrafast Structured Illumination" Electronic Materials 3, no. 1: 93-100. https://doi.org/10.3390/electronicmat3010009
APA StyleHuang, H., Li, L., Ma, Y., & Sun, M. (2022). 25,000 fps Computational Ghost Imaging with Ultrafast Structured Illumination. Electronic Materials, 3(1), 93-100. https://doi.org/10.3390/electronicmat3010009