
Derivation of Cyclic Stiffness and Strength Degradation Curves of Sands through Discrete Element Modelling


Abstract
1. Introduction
2. Discrete Element Method for Cyclic Triaxial Testing
2.1. Equation of Motion

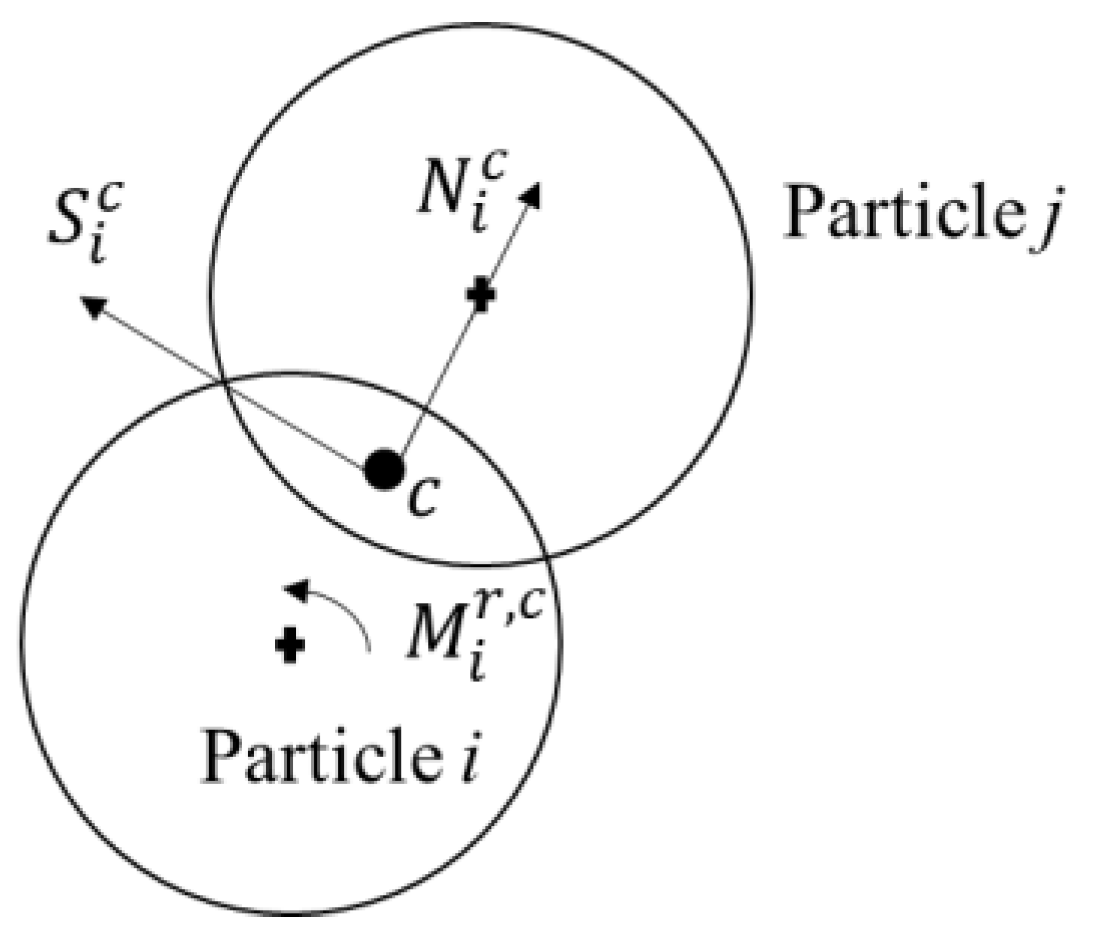
2.2. Contact Model
2.3. Calibration of the Input Parameters for Cyclic Triaxial Testing
3. Results
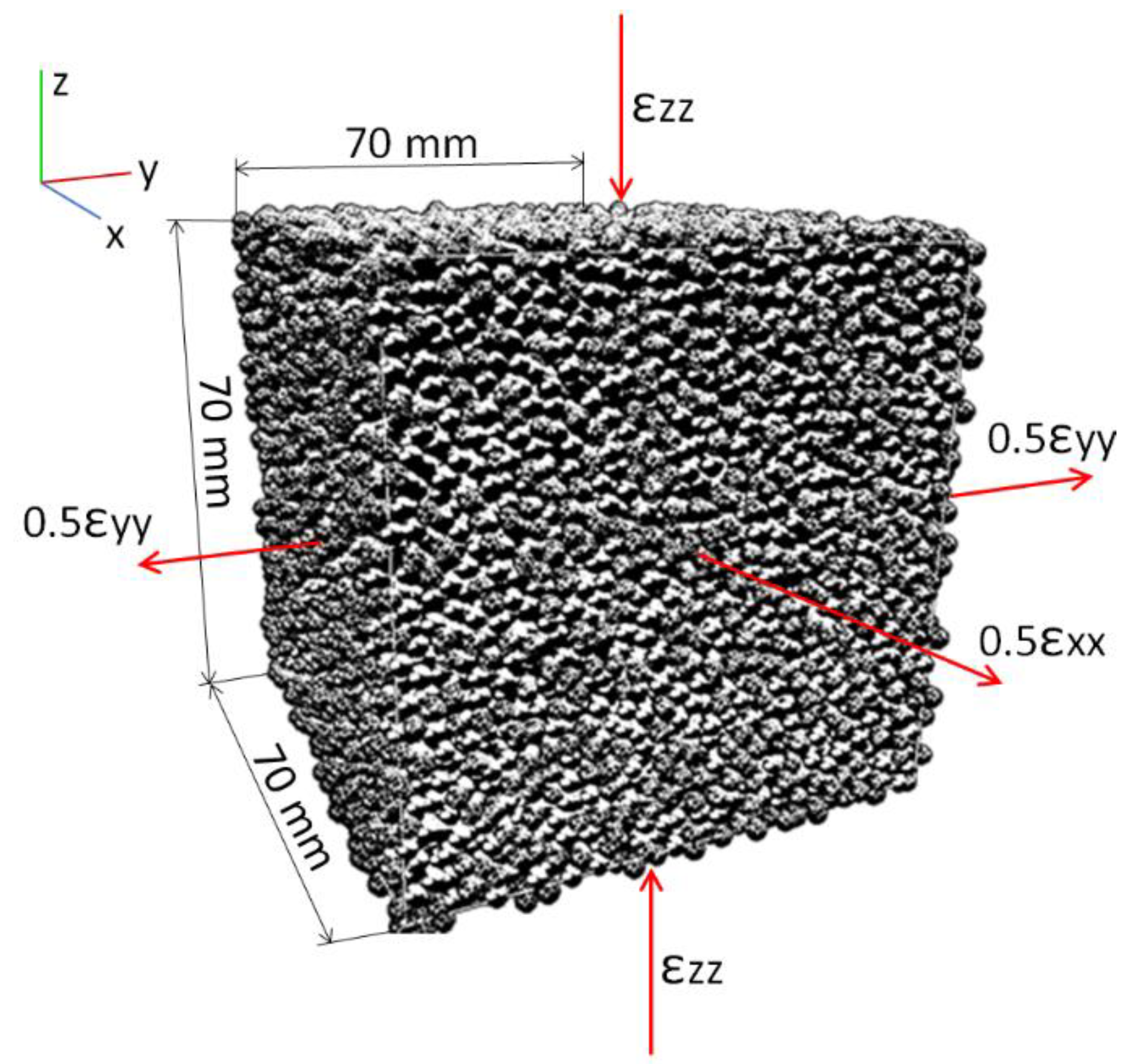
3.1. Model Description
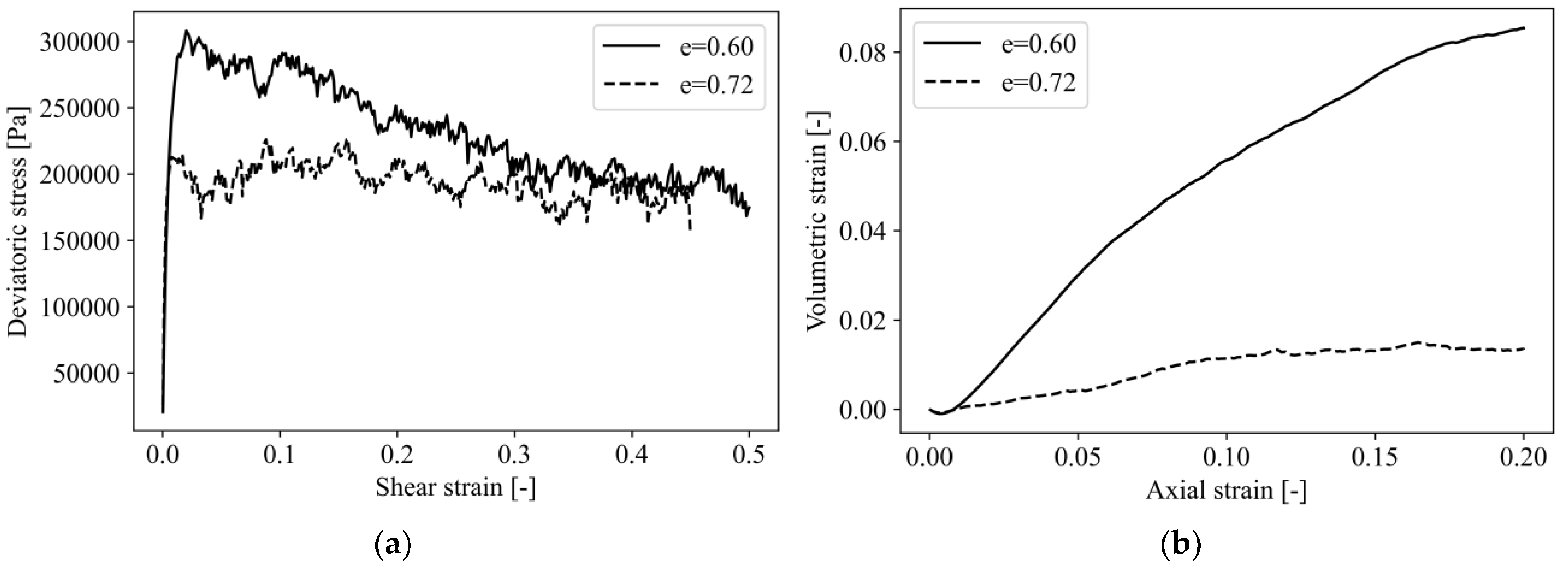
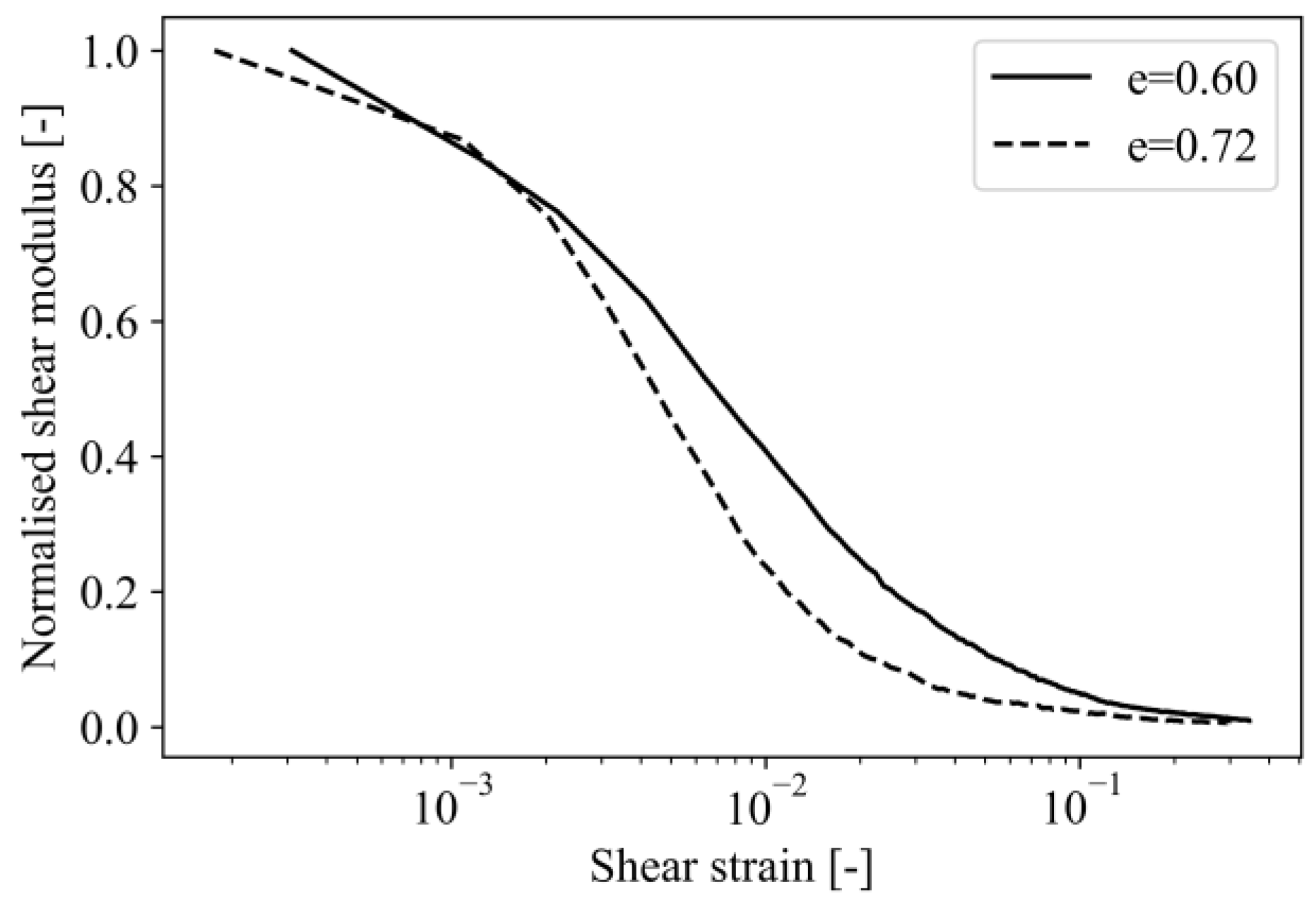
3.2. Monotonic Triaxial Testing
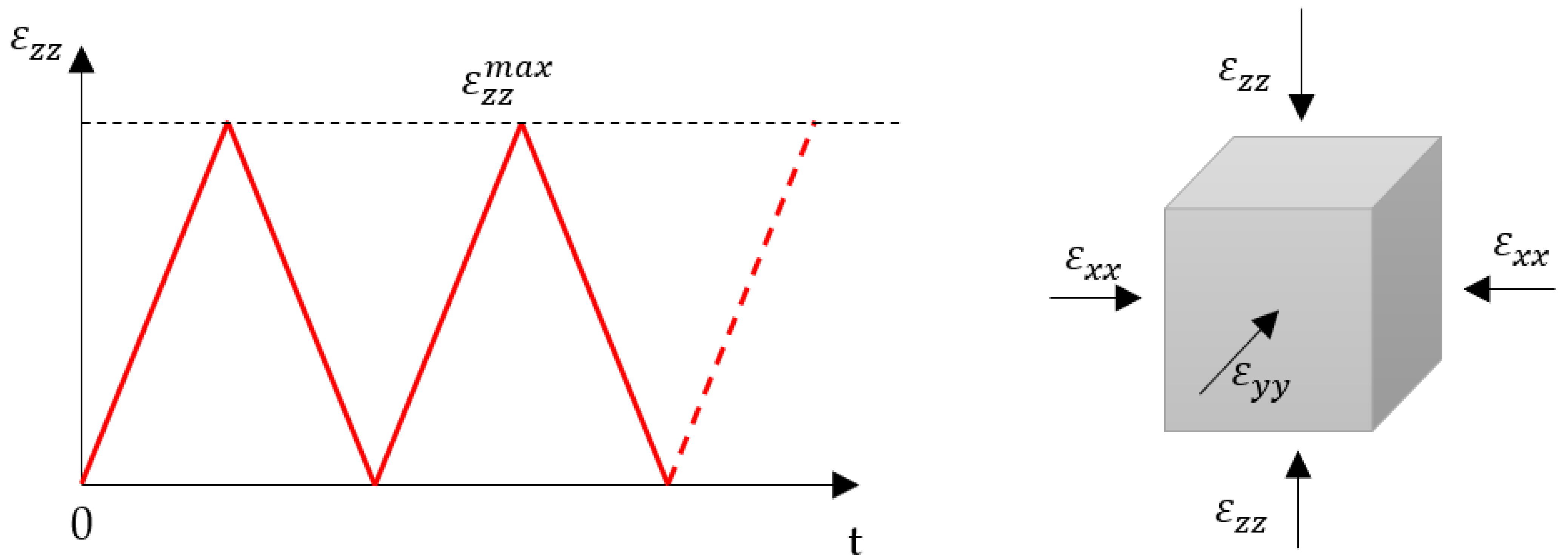
3.3. Cyclic Triaxial Testing
4. Discussion
5. Concluding Remarks
- Geotechnical properties such as the peak and residual angle of friction, as well as the shear modulus, are consistent with the values given in the literature from real soils.
- The different volumetric behavior of loose sand and medium-dense sand has been simulated without resorting to complex constitutive models or the calibration of several parameters. The same input parameters were used for both specimens, evidencing how the distribution of the particles and, hence, the void ratio of the packing is the main aspect affecting the soil behavior of the sands.
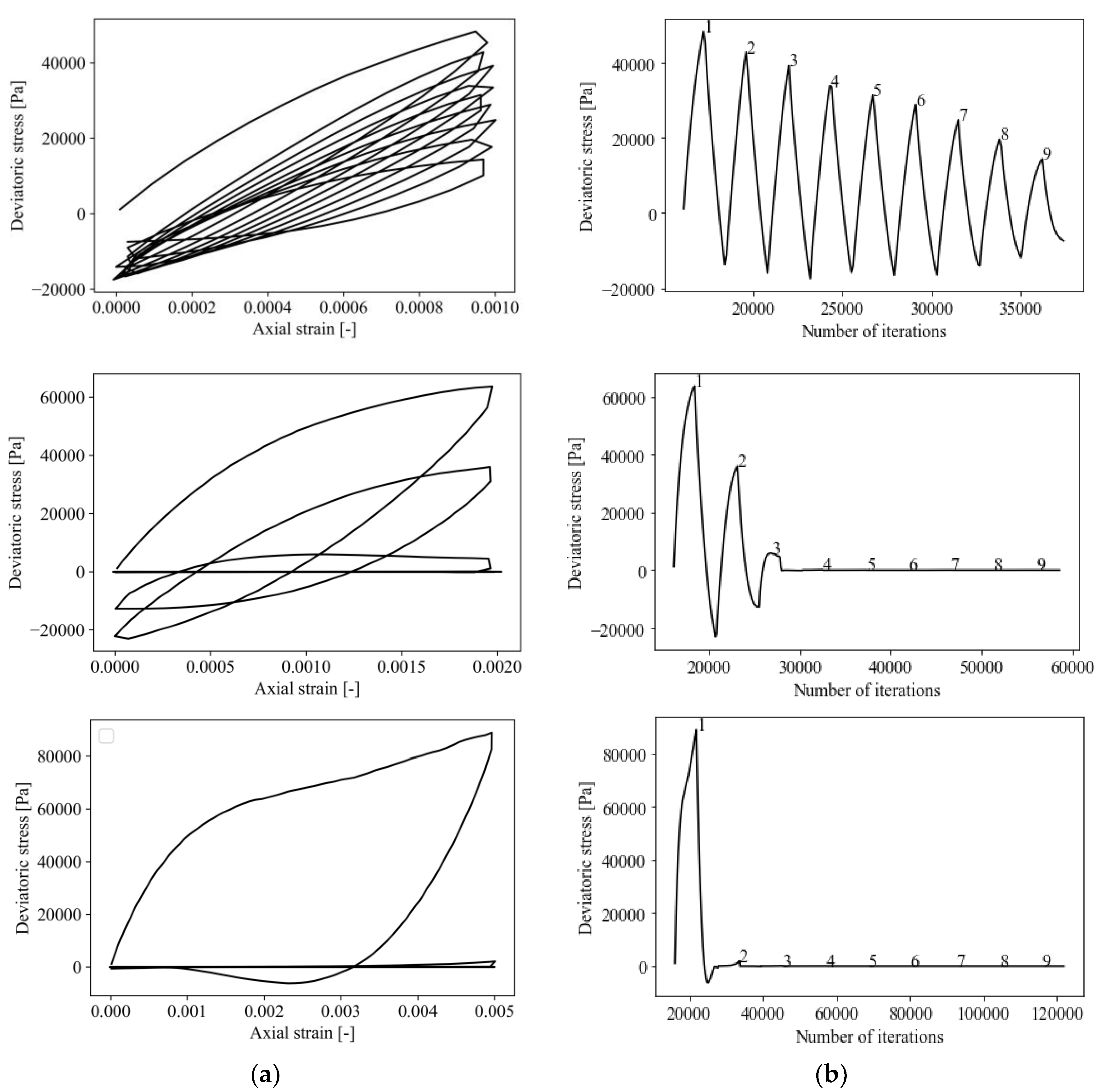
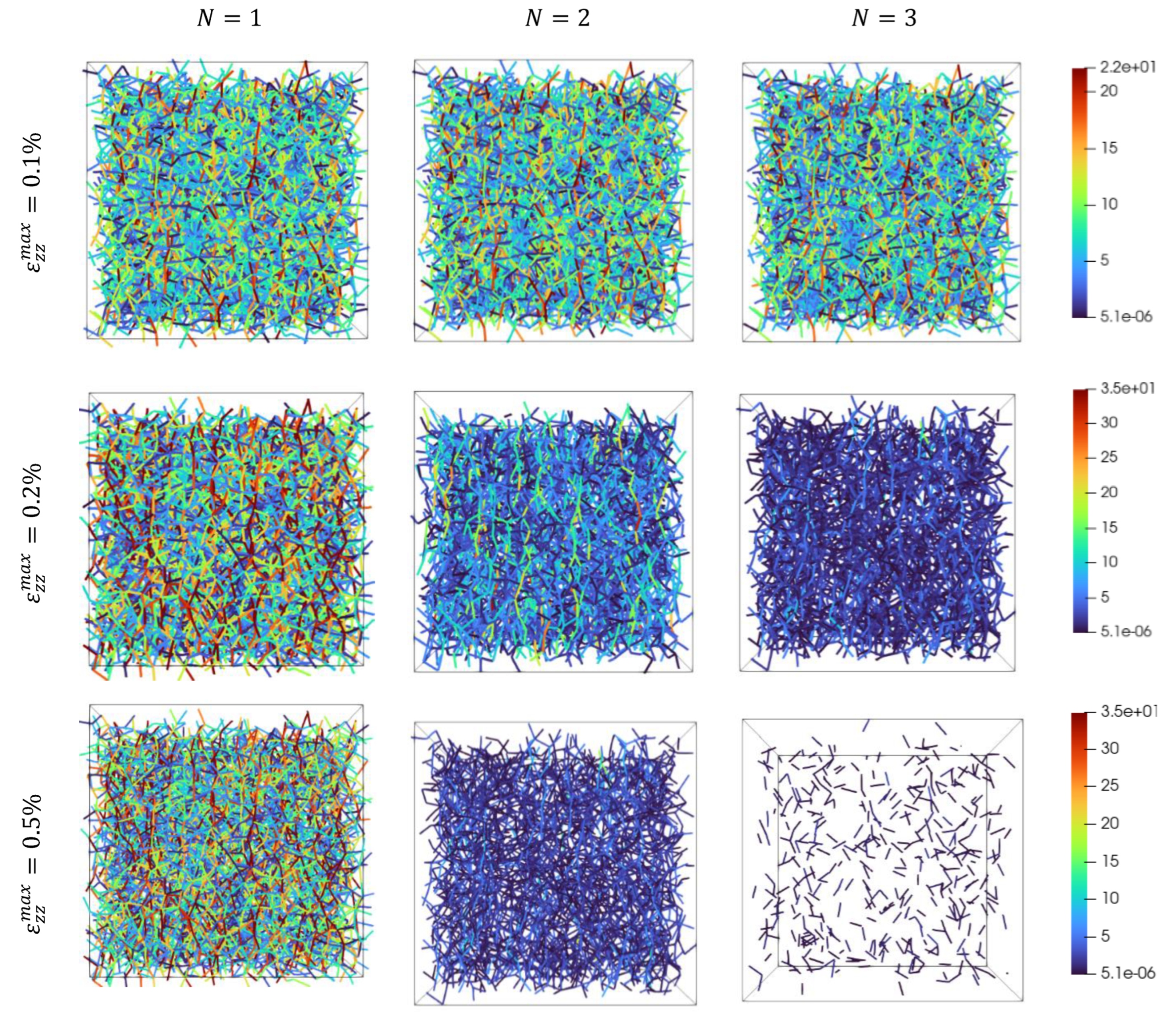
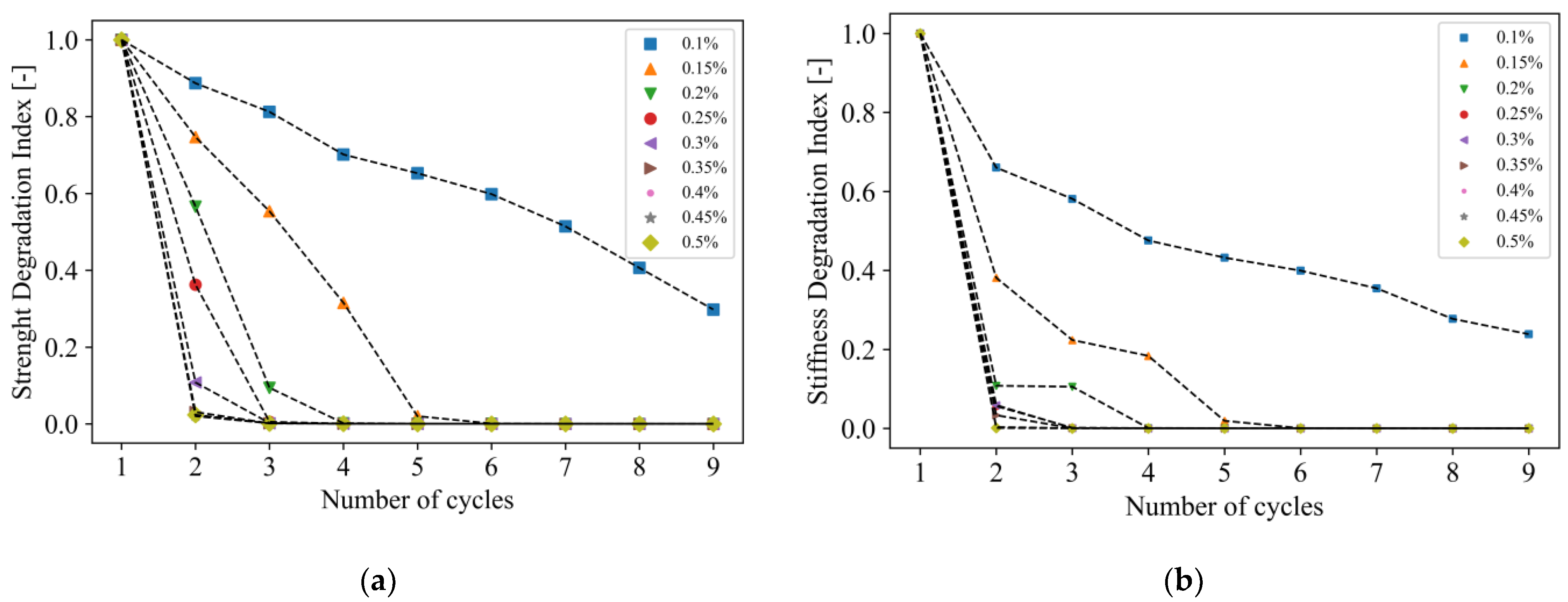
- The cyclic contractive tendency of the loose soil under undrained conditions at small values of strain observed during the monotonic triaxial testing leads to a cyclic degradation of its strength and stiffness; this is compatible with the real phenomenon of the liquefaction or cyclic mobility.
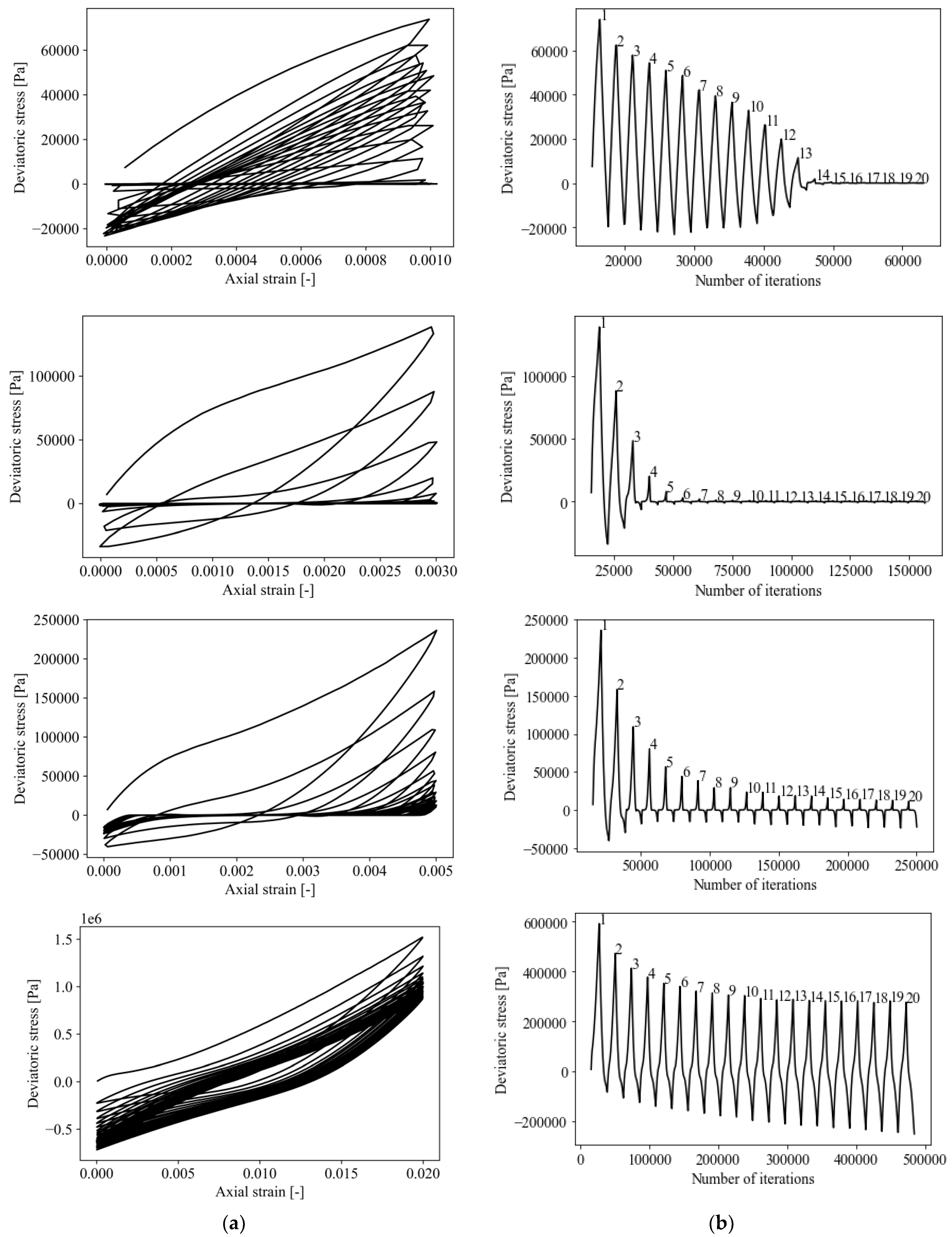
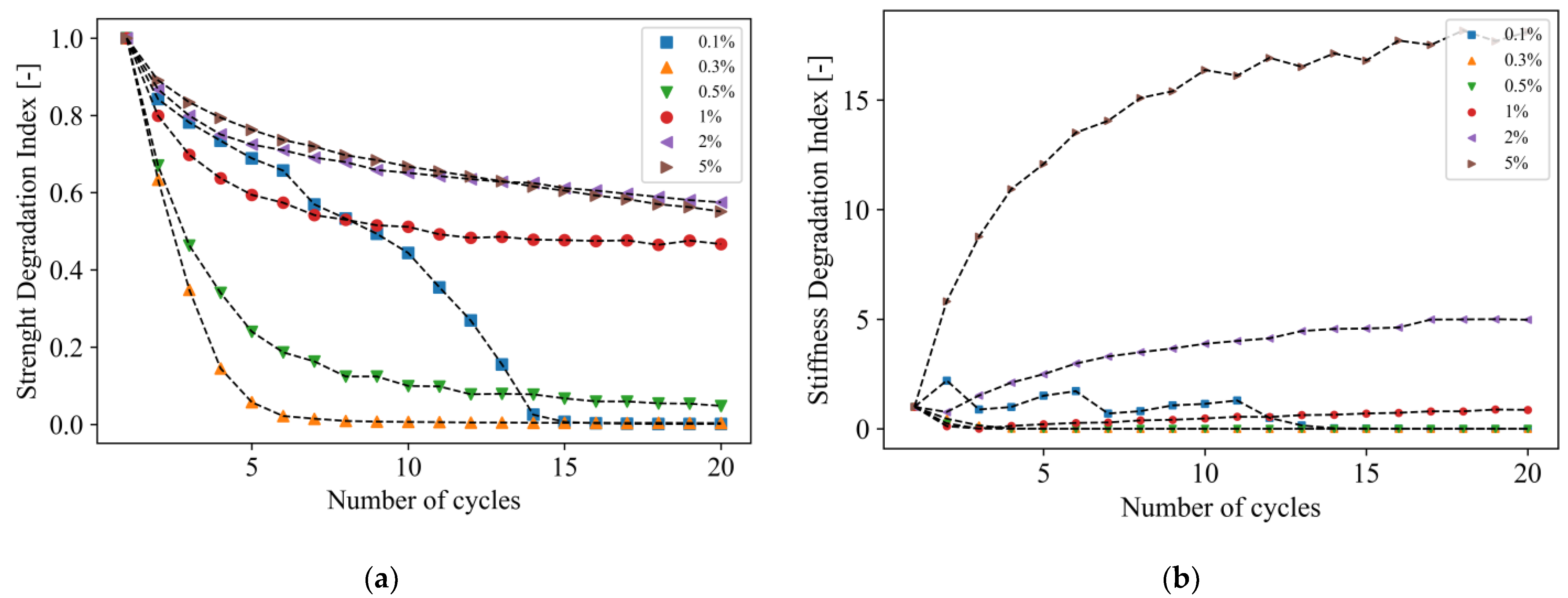
- The cyclic tendency to dilate in medium-dense sands yields to a stabilization of the soil degradation; this is compatible with the reduction of the excess pore pressure, as occurred in the real medium-dense sands.
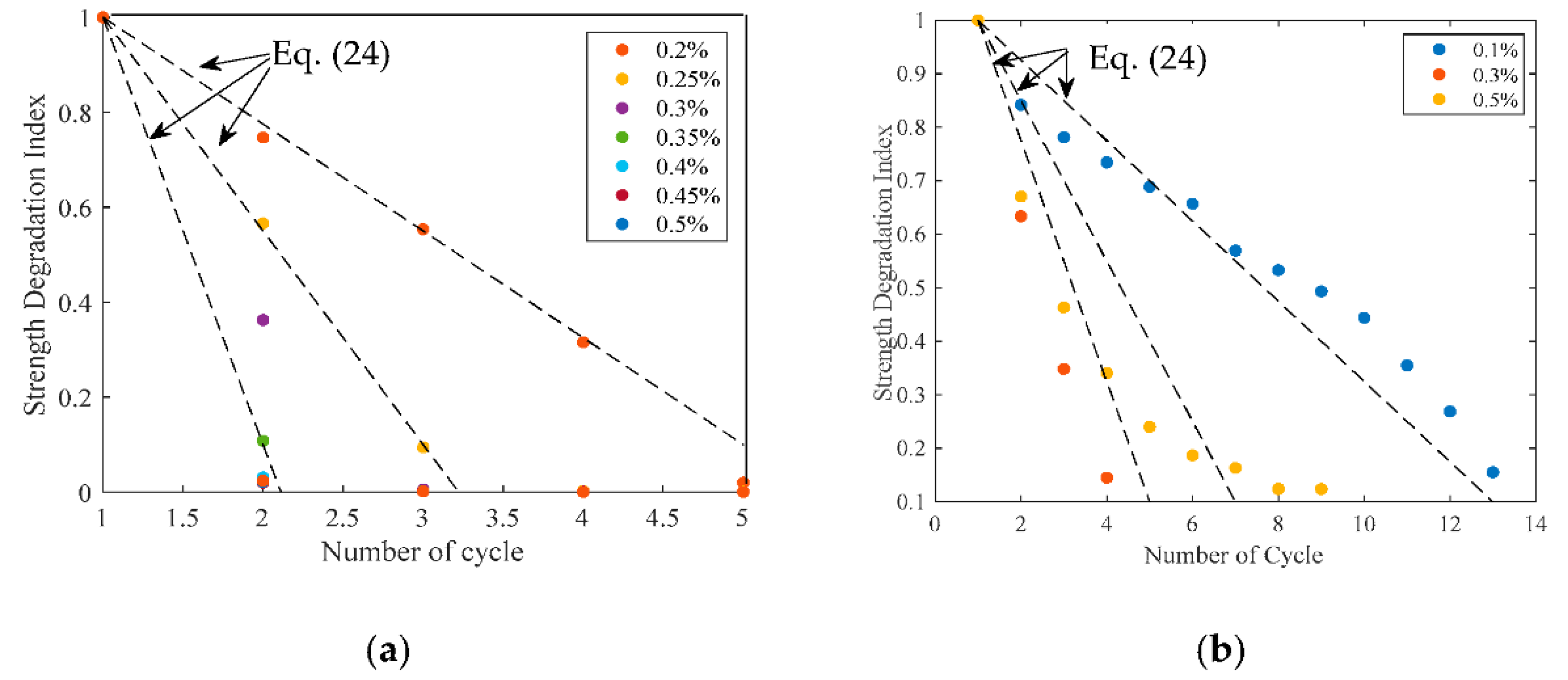
- The coefficients to model a linear cyclic damage model were obtained as a function of the maximum applied axial strain and soil consistency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tombari, A.; El Naggar, M.H.; Dezi, F. Impact of ground motion duration and soil non-linearity on the seismic performance of single piles. Soil Dyn. Earthq. Eng. 2017, 100, 72–87. [Google Scholar] [CrossRef]
- Allotey, N.; El Naggar, M.H. A consistent soil fatigue framework based on the number of equivalent cycles. Geotech. Geol. Eng. 2007, 26, 65–77. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. State of the Art and Practice in the Assessment of Earthquake-Induced Soil Liquefaction and Its Consequences; The National Academies Press: Washington, DC, USA, 2021. [Google Scholar]
- Boulanger, R.W.; Ziotopoulou, K. Formulation of a sand plasticity plane-strain model for earthquake engineering applications. Soil Dyn. Earthq. Eng. 2013, 53, 254–267. [Google Scholar] [CrossRef]
- Beaty, M.H.; Byrne, P.M. Liquefaction and deformation analyses using a total stress approach. J. Geotech. Geoenvironmental Eng. 2008, 134, 1059–1072. [Google Scholar] [CrossRef]
- Elgamal, A.; Yang, Z.; Parra, E.; Ragheb, A. Modeling of cyclic mobility in saturated cohesionless soils. Int. J. Plast. 2003, 19, 883–905. [Google Scholar] [CrossRef]
- Cundall, P.A. A computer model for simulating progressive, large-scale movement in blocky rock system. In Proceedings of the International Symposium on Rock Mechanics, Nancy, France, 4–6 October 1971. [Google Scholar]
- Stránský, J.; Jirásek, M.; Šmilauer, V. Macroscopic elastic properties of particle models. In Proceedings of the International Conference on Modelling and Simulation, Prague, Czech Republic, 22–25 June 2010. [Google Scholar]
- Grabowski, A.; Nitka, M.; Tejchman, J. 3D DEM simulations of monotonic interface behaviour between cohesionless sand and rigid wall of different roughness. Acta Geotech. 2020, 16, 1001–1026. [Google Scholar] [CrossRef]
- Plassiard, J.; Belheine, N.; Donzé, F. A spherical discrete element model: Calibration procedure and incremental response. Granul. Matter 2009, 11, 293–306. [Google Scholar] [CrossRef]
- Thornton, C.; Liu, L. DEM simulations of uniaxial compression and decompression. In Compaction of Soils, Granulates and Powders; CRC Press: Boca Raton, FL, USA, 2000; Volume 3, p. 251. [Google Scholar]
- Kozicki, J.; Tejchman, J.; Mühlhaus, H. Discrete simulations of a triaxial compression test for sand by DEM. Int. J. Numer. Anal. Methods Geomech. 2014, 38, 1923–1952. [Google Scholar] [CrossRef]
- Kozicki, J.; Tejchman, J.; Mróz, Z. Effect of grain roughness on strength, volume changes, elastic and dissipated energies during quasi-static homogeneous triaxial compression using DEM. Granul. Matter 2012, 14, 457–468. [Google Scholar] [CrossRef]
- Belheine, N.; Plassiard, J.; Donzé, F.; Darve, F.; Seridi, A. Numerical simulation of drained triaxial test using 3D discrete element modeling. Comput. Geotech. 2009, 36, 320–331. [Google Scholar] [CrossRef]
- Salot, C.; Gotteland, P.; Villard, P. Influence of relative density on granular materials behavior: DEM simulations of triaxial tests. Granul. Matter 2009, 11, 221–236. [Google Scholar] [CrossRef]
- Li, W.C.; Li, H.J.; Dai, F.C.; Lee, L.M. Discrete element modeling of a rainfall-induced flowslide. Eng. Geol. 2012, 149–150, 22–34. [Google Scholar] [CrossRef]
- Sitharam, T.G.; Dinesh, S.V. Micromechanical modeling of granular materials using three dimensional discrete element modeling. Key Eng. Mater. 2002, 227, 73–78. [Google Scholar] [CrossRef]
- Gong, G. DEM simulations of granular soils under undrained triaxial compression and plane strain. J. Appl. Math. Phys. 2015, 03, 1003–1009. [Google Scholar] [CrossRef][Green Version]
- O’Sullivan, C. Particle-based discrete element modeling: Geomechanics perspective. Int. J. Geomech. 2011, 11, 449–464. [Google Scholar] [CrossRef]
- Aboul Hosn, R.; Sibille, L.; Benahmed, N.; Chareyre, B. Discrete numerical modeling of loose soil with spherical particles and interparticle rolling friction. Granul. Matter 2016, 19, 4. [Google Scholar] [CrossRef]
- Iwashita, K.; Oda, M. Rolling Resistance at Contacts in Simulation of Shear Band Development by DEM. J. Eng. Mech. 1998, 124, 285–292. [Google Scholar] [CrossRef]
- Oda, M.; Konishi, J.; Nemat-Nasser, S. Experimental micromechanical evaluation of strength of granular materials: Effects of particle rolling. Mech. Mater. 1982, 1, 269–283. [Google Scholar] [CrossRef]
- Wood, M.D. Soil Behaviour and Critical State Soil Mechanics; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Wensrich, C.M.; Katterfeld, A. Rolling friction as a technique for modelling particle shape in Dem. Powder Technol. 2012, 217, 409–417. [Google Scholar] [CrossRef]
- Ishihara, K. Simple method of analysis for liquefaction of sand deposits during earthquakes. Soils Found. 1977, 17, 1–17. [Google Scholar] [CrossRef]
- Zhang, W.; Rothenburg, L. Comparison of undrained behaviors of granular media using fluid-coupled discrete element method and constant volume method. J. Rock Mech. Geotech. Eng. 2020, 12, 1272–1289. [Google Scholar] [CrossRef]
- Ng, T.T.; Dobry, R. Numerical simulations of monotonic and cyclic loading of granular soil. J. Geotech. Eng. 1994, 120, 388–403. [Google Scholar] [CrossRef]
- Martin, E.L.; Thornton, C.; Utili, S. Micromechanical investigation of liquefaction of granular media by cyclic 3D DEM tests. Géotechnique 2020, 70, 906–915. [Google Scholar] [CrossRef]
- O’Sullivan, C.; Cui, L.; Nakagawa, M.; Luding, S. Fabric evolution in granular materials subject to drained, strain controlled cyclic loading. AIP Conf. Proc. 2009, 1145, 285–288. [Google Scholar]
- Sitharam, T.G. Discrete element modelling of cyclic behaviour of granular materials. Geotech. Geol. Eng. 2003, 21, 297–329. [Google Scholar] [CrossRef]
- Vinod, J.S.; Indraratna, B.; Sitharam, T.G. DEM modelling of granular materials during cyclic loading. In Proceedings of theInternational Conference on Case Histories in Geotechnical Engineering, Chicago, IL, USA, 29 April–4 May 2013. [Google Scholar]
- Van Gunsteren, W.; Berendsen, H. A Leap-frog Algorithm for Stochastic Dynamics. Mol. Simul. 1988, 1, 173–185. [Google Scholar] [CrossRef]
- Grubmüller, H.; Heller, H.; Windemuth, A.; Schulten, K. Generalized Verlet Algorithm for Efficient Molecular Dynamics Simulations with Long-range Interactions. Mol. Simul. 1991, 6, 121–142. [Google Scholar] [CrossRef]
- Cundall, P.; Strack, O. A discrete numerical model for granular assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Roux, J.; Combe, G. How granular materials deform in quasistatic conditions. AIP Conf. Proc. 2010, 1227, 260–270. [Google Scholar]
- Radjai, F.; Dubois, F. Discrete-Element Modeling of Granular Materials; Wiley-Iste: New York, NY, USA, 2011; p. 425. [Google Scholar]
- Thornton, C.; Antony, S. Quasi–static deformation of particulate media. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 356, 2763–2782. [Google Scholar] [CrossRef]
- Macaro, G.; Utili, S. Dem triaxial tests of a seabed sand. Spec. Publ. 2012, 339, 203–211. [Google Scholar]
- Kozicki, J.; Donzé, F. A new open-source software developed for numerical simulations using discrete modeling methods. Comput. Methods Appl. Mech. Eng. 2008, 197, 4429–4443. [Google Scholar] [CrossRef]
- Cubrinovski, M.; Ishihara, K. Maximum and Minimum Void Ratio Characteristics of Sands. Soils Found. 2002, 42, 65–78. [Google Scholar] [CrossRef]
- Peck, R.; Hanson, W.; Thornburn, T. Foundation Engineering Handbook; Wiley: London, UK, 1974. [Google Scholar]
- Obrzud, R.; Truty, A. The Hardening Soil Model—A Practical Guidebook Z Soil PC 100701 report, revised 31.01. Available online: https://www.zsoil.com/zsoil_manual/Rep-HS-model.pdf (accessed on 25 September 2022).
- Hardin, B.O.; Drnevich, V.P. Shear modulus and damping in soils: Measurement and parameter effects (Terzaghi Leture). J. Soil Mech. Found. Div. 1972, 98, 603–624. [Google Scholar] [CrossRef]
- Ishihara, K. Liquefaction and flow failure during earthquakes. Géotechnique 1993, 43, 351–451. [Google Scholar] [CrossRef]
- Mohamad, R.; Dobry, R. Undrained monotonic and cyclic triaxial strength of sand. J. Geotech. Eng. 1986, 112, 941–958. [Google Scholar] [CrossRef]
- Vaid, Y.P.; Fisher, J.M.; Kuerbis, R.H.; Negussey, D. Particle gradation and liquefaction. J. Geotech. Eng. 1990, 116, 698–703. [Google Scholar] [CrossRef]
- Idriss, I.M.; Dobry, R.; Singh, R.D. Nonlinear behavior of soft clays during cyclic loading. J. Geotech. Eng. Div. 1978, 104, 1427–1447. [Google Scholar] [CrossRef]
- Matlock, H.; Faa, S.H.C.; Cheang, L.C.C. Example of soil-pile coupling under seismic loading. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 7 May 1978. [Google Scholar]
- Swane, I.C.; Poulos, H.G. Shakedown analysis of a laterally loaded pile tested in stiff clay. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1985, 22, 183. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Dimensionless stiffness level | ||
| Poisson’s ratio | 0.2 | |
| Rolling stiffness coefficient | 2 | |
| Particle density | ||
| Interparticle friction angle | ||
| Limiting rolling coefficient | 10−2 | |
| Mean particles’ radius | 10−3 m |
| Parameters | Loose Sand | Medium-Dense Sand |
|---|---|---|
| [%] | ||
| Rel. density at critical state [%] | 29 | 29 |
| Peak friction angle [°] | 35 | |
| Residual frictional angle [°] | ||
| Initial Shear Modulus [MPa] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maksimov, F.; Tombari, A. Derivation of Cyclic Stiffness and Strength Degradation Curves of Sands through Discrete Element Modelling. Modelling 2022, 3, 400-416. https://doi.org/10.3390/modelling3040026
Maksimov F, Tombari A. Derivation of Cyclic Stiffness and Strength Degradation Curves of Sands through Discrete Element Modelling. Modelling. 2022; 3(4):400-416. https://doi.org/10.3390/modelling3040026
Chicago/Turabian StyleMaksimov, Fedor, and Alessandro Tombari. 2022. "Derivation of Cyclic Stiffness and Strength Degradation Curves of Sands through Discrete Element Modelling" Modelling 3, no. 4: 400-416. https://doi.org/10.3390/modelling3040026
APA StyleMaksimov, F., & Tombari, A. (2022). Derivation of Cyclic Stiffness and Strength Degradation Curves of Sands through Discrete Element Modelling. Modelling, 3(4), 400-416. https://doi.org/10.3390/modelling3040026